飞控WiFi控制卡操作手册
PX4飞控使用手册-第四章:PX4的script以及七七八八
APM for PX4飞控使用手册第四章:PX4的script以及七七八八——sw笨笨总结1.前言感谢老天让我知道这样一款飞控,并给了我宝贵的两周闲时间专心鼓丘。
感谢PX4原作者的精心设计,虽然我不喜欢他的硬件。
感谢APM提供了成熟的固件,虽然我已经回归PX4固件。
感谢急速捕风将这样的硬件制作完毕完成硬件调试,然后卖到我手里。
作为一个航模爱好者,在我还没拿到这款飞控之前就有这么多人慷慨的给予了我帮助,我要再次感谢他们。
——sw笨笨2.为什么回归——强大的script功能a)什么是script?你需要定制你的飞控功能么?它可以实现。
从传感器,到接口,从存储到串口。
注意:script是在刚刚启动就介入了,改变了硬件的功能,所以只能在PX4原版固件下使用script,APM for PX4会消化不良死在那里。
b)Script在哪里?编写一个“rc.txt”文本文件,放在PX4上面TF卡的“etc”目录下。
就这样,无需其他工作和设置。
这个文件格式正确,那么系统有限执行其中的设置,而忽略原有的设置。
如果这个文件有语句错误——死在这里没的说。
c)Script能做什么?●停止USB节省资源。
●设置和启动自驾基本模式。
●设置TF卡,PX4还是保守的称其为“microSD”。
●设置通讯协议,并启动。
●设置FMU板接口功能。
●启动传感器、GPS、姿态结算、姿态控制、航迹控制、光流、IO等等。
●启动串口输出并设置参数。
●启动信息记录。
●还有很多等待你自己挖掘。
d)Script怎么写●它就像DOS的“autoexec”一样容易,别告诉我你没玩儿过DOS,感觉我是个老古董。
●首先最好从官网下几个script文件来节省时间,并用作参考。
https://pixhawk.ethz.ch/px4/users/apps/auto_starting_apps●全文以“#!nsh”开头,并以“exit”结束。
●全文使用顺序执行的基本执行顺序,逐句进行。
飞控WiFi控制卡操作手册

飞控W i F i控制卡操作手册文件编码(GHTU-UITID-GGBKT-POIU-WUUI-8968)飞控WiFi控制卡操作手册V目录1 概述WiFi控制卡与网络卡操作基本相同,只有WiFi连接以及对应的网络参数配置不同。
手册中将重点介绍WiFi配置部分。
节目内容编辑等请参见飞控卡相关使用说明或观看网站操作视频。
WiFi控制卡,当前只支持电脑软件更改节目内容,手机软件将在之后推出。
支持连接方式:WiFi直连局域网连接广域网连接(远程控制)WiFi配置途径:U盘设置网页设置软件通讯设置手册将按照不同连接方式下的操作进行介绍,详细请看对应章节。
2 WiFi直连WiFi直连:具有无线WiFi功能的电脑与控制卡直接通过WiFi连接控制卡。
硬件连接示意图软件操作2.2.1 WiFi连接在无线网络连接中,搜索控制卡的WiFi信号,并连接。
电脑请使用自动获取IP地址。
选择控制卡WiFi网络。
控制卡的默认WiFi网络名:卡型号-MAC地址后4位2.2.2 控制卡连接进入【通讯及屏参设置】后,可以用WiFi 直连检测到控制卡;也可以用固定IP ,输入控制卡IP 地址,检测到控制卡。
1. WiFi 直连方式注:直连一般不需要更改WiFi 配置,如想更改详细请参见。
①选择网②选择④点击控制卡⑤检测成功,如失败请确认检测成功后,会显示控制卡当前WiFi 设置。
如果需要改变WiFi 设置,点击【更改控制卡WiFi 设置】进行配置。
注:控制卡出厂配置,如下WiFi 连接模式:直连控制WiFi 名:控制卡型号-MAC 后四位(如:FK-BW4-AA4E )WiFi 密码: 控制卡IP :(固定IP③选择直2. 固定IP注:直连一般不需要更改WiFi 配置,如想更改详细请参见。
2.2.3 其他操作与串口卡一致①选择网②选择⑤点击控制卡⑥检测成功,如失败请确认③选择固定④输入控制检测成功后,会显示控制卡当前WiFi 设置。
如果需要改变WiFi 设置,点击【更改控制卡WiFi 设置】进行配置。
WIFI控制器UFO版产品说明书【模板】

(H)支持安卓2.3.3,IOS 6.0系统以上的机型,包括市面上绝大部分手机和平板电脑型号;
(I)支持远程控制功能,只要有网络,再全世界任何地方都可以控制你家里的灯;
III.
III.01
输入电压:DC12V-DC24V
功率:DC12V:192W; DC24V:384W;
I.
LED WiFi控制器是继传统带有的红外、射频技术的控制器基础之上,应市场需求,客户的需要而诞生的,它是一款集成市场上最新的WiFi技术的控制器。它使得LED的控制更加方便,更加人性化。我们可以用一个安卓系统或者IOS系统的手机安装了控制软件便可以遥控LED,这也正是每个客户的心声!
利用WiFi技术可以使我们的控制范围更广阔,可以挣脱狭小空间的束缚,在建筑里面可以遥控30米远,在室外的话就可以遥控50米以上。
控制对象:共正极恒压灯具,包括灯带,硬灯条,软灯条等产品;
输出功率:4A*4
接线方式:共正极
输入:(端子输入或者DC头输入任选其一)
V+:接电源正极;
V-:接电源负极;
输出:
V+:接灯具正极;
R:接灯具的红色正极;
G:接灯具的绿色正极;
B:接灯具的蓝色正极;
W:接灯具的白色正极,灯具没有此端可不接;
II.
(A)具有1600万种静态颜色,20种内置动态模式,自定义模式,音乐模式;
(B)具有分组功能;
(C)具有定时功能,定时开关、静态颜色,动态模式任意设置;
(D)一键WPS配置连接到路由器;
(E)连接路由器后,手机上的WIFI网络名称自动隐藏,有效防止盗连;
(F)记忆功能,断电后仍然保持原有的状态;
极翼 P3 飞控使用手册说明书
P3飞控使用手册V1.1.12021/9/17首先感谢您购买本产品!请您严格按照使用手册要求将本产品安装在您的飞行器上,祝您使用愉快。
注意:p3飞控支持植保功能,默认发货是不含有植保功能的,如需要开通植保功能,本说明书有开通流程;如不需要使用植保功能,关于植保功能的调试可以忽略。
如果您在使用过程中遇到无法解决的问题,请联系极翼机器人(上海)有限公司技术支持或售后人员。
联系电话:187****8648;微信视频号:极翼机器人;QQ群:458942467。
免责声明温馨提示:极翼P3飞控不是玩具,请在使用之前,认真阅读本声明,即表示您认可并接受本声明,本产品不适合18周岁以下的用户使用。
本产品为极翼推出的一款为行业应用而研发的专业级飞控,满足用户植保、测绘、航拍、培训等用途。
极翼将对高品质产品的追求融入到本飞控的开发中,以使其更加稳定可靠,不过为了您和他人的安全,强烈建议您在使用调参软件时卸下螺旋桨,在飞行体验时确保接线正确、供电正常并远离人群、易损及危险品。
您使用本产品时,因以下任何原因(包括并不仅限如下原因)导致您及他人财产损失甚至人身伤害(包括直接或间接),极翼仅承担因本飞控产品问题原因导致的飞控损失、将不予承担其他任何责任及赔偿:1.用户在使用时未按照本手册的正确引导;2.飞行器本身强度过低及结构受损;3.用户使用的第三方产品出问题引起飞行器运行不良;4.用户主观判断失误或操控不当;5.用户主观故意针对他人;6.用户在明知本产品处于非正常工作状态仍然冒险飞行;7.用户在强磁干扰、无线电干扰和政府禁止的区域或视线受到遮挡无法判断飞行器姿态的状况飞行;8.用户在恶劣的不适合飞行的气象条件下飞行;9.用户私自拆卸及改装极翼公司生产的产品及配件致使飞行器运转不良;10.用户在饮酒、吸毒等主观行为引起的精神状态不良或自身健康出问题的客观因素条件下飞行;11.其它非极翼产品本身问题导致的不属于极翼责任范围的损失。
Myflydream AP飞控 最新中文说明书

MyFlyDream AutoPilot使用手册V1.0注意事项感谢您购买MyFlyDream 飞控(以下简称MFD AP或者AP).请根据本文档熟悉本产品及其操作方法. 本产品是一款精密的电子设备. 请仔细阅读本文档以防止设备受损.本产品只适用于模型娱乐用途, 请在遵守当地相关法律规定的前提下使用. 因可靠性和精度受多个因素影响: 强烈的电磁干扰, 恶劣的GPS星况或者其他若干原因都可能导致不理想的效果. 使用本产品导致的所有风险和后果由用户承担.我们保留不停改进和提高产品性能的权利, 所以本文档的内容不一定与您手上的产品规格完全符合, 请到我们的网站下载本文档的最新版本:1.系统的组成2.工作原理和特点MFD AP内建三轴陀螺仪,三轴加速度计,三轴电子罗盘以及气压计等传感器。
AP用一个处理器专门负责飞控的姿态估算,另一个处理器则负责处理OSD画面和飞行逻辑。
基于这些软硬件,AP可以用于增加飞机的稳定度,或控制飞机按设计的航线和高度飞行,实现自动驾驶。
MFD AP的先进特性包括:1)全姿态的AHRS,最大滚动角速率为2000deg/s2)像素级的黑白双色OSD,刷新率>30fps,界面元素刷新无滞后3)集成对MFD AutoAntennaTracker(AAT)的支持,无缝接驳MFD自动跟踪天线系统4)通过OSD可实现所有参数的调节和航点的可视化设置,无须PC参与5)支持MAVLink协议,可以兼容开源地面站APM Planner,设置航点和实时显示飞行参数3.性能参数4.连接MFD AP的插针按功能可以分为A~J接口,如上图所示。
与周边主要设备连接示意图:A)Power此接口为飞控提供电源。
MFD AP可以用7~20V供电。
但因为AP提供给摄像头和图传的电源直接取自飞控的电源输入,所以建议使用12V为飞控供电。
这样可以直接让飞控供电给大多数12V的摄像头和图传,总体接线比较简洁。
B)CH1~CH6 Input此接口与RC接收机连接,读取来自RC接收机的6 个PWM通道信号。
双子星飞控用户手册

6.3.1 接线图...................................................................................................................12 6.3.2 实物图...................................................................................................................12 7.调试准备...................................................................................................................................... 14 7.1 安装手机版 GCS .............................................................................................................14 7.2WIFI 配置 ......................................................................................................................16 7.2.1WIFI 的通讯模式 ..................................................................................................16 7.2.2WIFI 配置 ..............................................................................................................16 7.3 遥控器设置 ......................................................................................................................19 8. 地面站软件调试.........................................................................................................................20 8.1 磁场校准...........................................................................................................................21 8.2 地面站软件辅助设置(安装向导) ..............................................................................23 8.3 手动设置 ..........................................................................................................................25 8.3.1 校准遥控器摇杆通道...........................................................................................25 8.3.2 设置飞机种类及参数...........................................................................................27 8.3.3 检查 CH5 和 CH6 通道,F/S(失控保护) ......................................................29 8.3.4 校准电调行程.......................................................................................................30 8.3.5 检查双子星飞控和 GPS 的安装..........................................................................30 9. 外场调试.....................................................................................................................................31 9.1 采集开/关伞......................................................................................................................31 9.2 掰杆解锁 ..........................................................................................................................31 9.3 电机混控检查 ..................................................................................................................32 9.4 参数设置 ..........................................................................................................................33 9.4.1 飞行器参数设置...................................................................................................33 9.4.2 飞行器晃动的参数调整.......................................................................................35 10.外场飞行....................................................................................................................................36 10.1 飞行状态........................................................................................................................36 10.1.1 LED 指示状态及意义 ........................................................................................36 10.1.2 震动系数和晃动系数.........................................................................................37 10.1.3 电机平衡性和实际油门位.................................................................................37 10.2 飞行方式........................................................................................................................38 10.2.1 半自动起飞.........................................................................................................38
飞控网络卡操作手册
飞控网络卡操作手册1计算机与控制卡直连 (3)1.1硬件连接示意图 (3)1.2软件操作 (3)1.2.1 连接控制卡 (3)1.2.2 其他操作与串口通讯卡一致 (3)2局域网连接 (4)2.1硬件连接示意图 (4)2.2软件操作 (4)2.2.1 控制卡网络设置 (4)2.2.2 局域网只有一个屏 (5)2.2.3 局域网有多个屏 (7)2.2.3.1逐个进行网络配置,再全部接入局域网 (7)2.2.3.2全部接入局域网,再进行所有卡网络设置 (9)2.2.3.3首次配置之后,更改网络配置 (11)2.2.3.4网络卡IP自动获取 (12)3广域网连接 (15)3.1单张屏连接 (15)3.1.1 显示屏端配置 (16)3.1.1.1控制卡网络配置 (16)3.1.1.2路由器(ADSL)配置 (16)3.1.1.3使用域名方式连接控制卡 (17)3.1.1.4使用控制卡公网IP方式连接控制卡 (18)3.1.2 控制电脑端配置、连接 (19)3.2多张屏集群连接 (21)3.2.1 显示屏端配置 (22)3.2.1.1控制卡网络配置 (22)3.2.1.2远程服务器使用固定IP (22)3.2.1.3远程服务器使用域名 (23)3.2.1.4路由器(ADSL)配置 (25)3.2.2 控制电脑端的配置、连接 (27)3.2.2.1路由器(ADSL)配置 (27)3.2.2.2通知服务器使用域名 (28)3.2.2.3软件操作 (28)1 计算机与控制卡直连1.1 硬件连接示意图1.2 软件操作 1.2.12 局域网连接2.1硬件连接示意图2.2软件操作2.2.1控制卡网络设置控制卡出厂的网络配置,一般不符合所在局域网的网络参数,第一步需要对卡进行网络配置。
网络卡在局域中时,会有两种情况,一种是局域网中只有一个屏,另外一种是局域网有多个屏;这两种情况方式,网络配置的方式会有所差别。
以下根据不同情况方式详细介绍。
飞行控制器说明书.pdf_1694207868.8118012
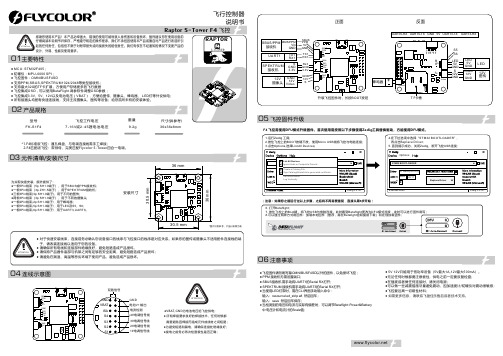
FK-S1F436x36x8mm9.2g安装尺寸7-16V或2-4S锂电池电压03 元件清单/安装尺寸04 连线示意图06 注意事项#电调信号线NDV+ 输出#电调信号线#电调信号线#电调信号线● 所有焊接要求良好的焊接技术,任何时候都需要避免因焊接而造成元件或线材之间短路;●为避免短路和漏电,请确保连接处绝缘良好;●接电之前务必再次检查极性是否正确;ATTENTION●VBAT,GND为电池电压给飞控供电;● 飞控固件请勿刷写除OMNIBUSF4SD以外的固件,以免损坏飞控;● PPM 接收机无需设置端口;SBUS接收机需手动将UART1的Serial RX打开;●SPEKTRUM 接收机需手动将UART3的Serial RX打开;●当使用LED灯带时,需在CLI界面手动输入命令:●输入:resource led_strip a8 然后回车;输入:save 然后回车保存;当检测到的电压和电流与实际有偏差时,可以调节Betaflight-Power&Battery●中 电压计和电流计的Scale值;●只能用于低功率设备(最大,最大)。
5V12V5V1A12V500mA●无论任何时候都要注意极性,供电之前一定要反复检查;●在插拔或者做任何连接时,请关闭电源;●可以做一些减震措施尽量避免震动,因加速度计/陀螺仪对震动很敏感;●飞控要远离一切磁性材料;● 如需更多信息,请联系飞盈佳乐售后或者技术支持。
为实现快速安装,额外提供了:●一根5Pin线束(5p SH1.0端子),用于SBUS或PPM接收机;●一根3Pin线束(3p ZH1.5端子),用于SPEKTRUM接收机;●三根3Pin线束(3p SH1.0端子),用于不同的图传;●两根3Pin线束(3p SH1.0端子),用于不同的摄像头;●一根2Pin线束(2p SH1.0端子),用于蜂鸣器;●一根5Pin线束(5p SH1.0端子),用于LED及S5,S6;●一根6Pin线束(6p SH1.0端子),用于UART3,UART6。
飞天技术 Flysky 遥控系统使用说明书

Copyright ©2020 Flysky Technology co., ltd1.1 安全符号 (1)1.2 安全信息 (1)2. 产品介绍 (2)2.1 系统特征 (2)2.2 发射机概览 (3)2.3 接收机概览 (7)2.3.1 状态指示灯 (7)3 使用前准备 (8)3.1 发射机电池安装 (8)4. 操作指引 (9)4.1 开机 (9)4.2 对码 (9)4.3 发射机LED 氛围灯 (9)4.4 关机 (9)5. 系统界面 (10)6. 功能设置 (11)6.1 通道反向 (11)6.2 舵机行程 (11)6.3 中位微调 (11)6.4 方向指数 (12)6.5 油门指数 (12)6.6 防抱死刹车 (13)6.7 计时器 (14)6.8 按键设定 (15)6.9 模型设置 (16)6.10 传感器 (16)6.11 方向速度 (18)6.12 方向混控 (19)6.13 油门速度 (19)6.14 油门类型 (19)6.15 油门死区 (20)6.16 油门曲线 (20)6.17 油门怠速 (20)6.18 油门锁定 (21)6.19 刹车混控 (21)6.20 混控 (22)6.21 船模式 (22)6.22 舵机显示 (22)6.23 初学者模式 (23)6.24 使用说明书 (23)7. 接收机设置 (24)7.1 对码 (24)7.2 舵机响应速度 (24)7.3 失控保护 (24)7.4 控制距离测试 (25)7.5 输出模式 (25)7.6 i-Bus 扩展通道设置 (26)7.7 接收机电压 (26)7.8 低信号报警 (26)7.9 更新接收机 (27)8. 系统设置 (28)8.1 语言 (28)8.2 单位 (28)8.3 背光调节 (28)8.4 通道数量定义 (28)8.5 声音 (29)8.6 振动 (29)8.7 LED (29)8.8 自动关机 (30)8.9 高频设置 (30)8.10 USB功能 (30)8.11 摇杆校准 (30)8.12 固件更新 (31)8.13 恢复出厂设置 (31)8.14 关于 Noble Lite (31)9. 产品规格 (32)9.1 发射机规格 (Noble Lite) (32)9.2 接收机规格 (FGr4) (33)9.3 接收机规格 (FGr4S) (33)9.4 传感器规格 (FS-CPD01) (33)9.5 传感器规格 (FS-CPD02) (34)9.6 传感器规格 (FS-CTM01) (34)9.7 传感器规格 (FS-CVT01) (34)9.8 串行总线接收机规格 (FS-CEV04) (35)10. 包装清单 (36)11. 认证相关 (37)11.1 DoC Declaration (37)11.2 CE Warning (37)11.3 Enviromentally Friendly Disposal (37)11.4 Appendix 1 FCC Statement (38)1•遥控设备使用不恰当可能导致操作者或他人严重受伤,甚至死亡。
飞行控制器说明书.pdf_1694207717.5769129

FK-S2F428x28x7.6mm5.8g安装尺寸7-16V或2-4S锂电池电压03 元件清单/安装尺寸04 连线示意图06 注意事项● 所有焊接要求良好的焊接技术,任何时候都需要避免因焊接而造成元件或线材之间短路;●为避免短路和漏电,请确保连接处绝缘良好;●接电之前务必再次检查极性是否正确;ATTENTIONF4 飞控需使用DFU模式升级固件。
首次使用需按照以下步骤使用Zadig工具替换驱动,方能使用DFU模式。
05 飞控固件升级推荐匹配R aptor S-Tower20A4in1电调, 安装更简单。
为实现快速安装,额外提供了:●一根6Pin线束(6p SH1.0端子),用于电调-飞控电源、信号;●一根3Pin线束(4p SH1.0端子),用于PPM接收机;●一根3Pin线束(4p SH1.0端子),用于SBUS接收机;●一根5Pin线束(5p SH1.0端子),用于LED,蜂鸣器;● 飞控固件请勿刷写除OMNIBUSF4以外的固件,以免损坏飞控;● PPM 接收机无需设置端口;SBUS或者SPEKTRUM 接收机需手动将UART1的Serial RX打开;●接收机需手动将UART1的Serial RX打开;●当检测到的电压和电流与实际有偏差时,可以调节Betaflight-Power&Battery●中 电压计和电流计的Scale值;●只能用于低功率设备(最大,最大);3.3V5V 3.3V0.1A5V1A●无论任何时候都要注意极性,供电之前一定要反复检查。
●在插拔或者做任何连接时,请关闭电源。
●不要把GND、VCC之间互相短接,这样会短路。
●可以做一些减震措施尽量避免震动。
● 如需更多信息,请联系飞盈佳乐售后或者技术支持。
4#电调信号线3#电调信号线GNDVin+1#电调信号线2#电调信号线S4S3S2S1VBATGNDFK-S2F4 28x28x7.6mm5.8gDimensions7-16V Or 2-4S LiPo VBAT06More informationSize(For reference)Model03Part list / DimensionsOperating VoltageWeight(For reference)You need to use DFU mode to recover firmware for F4 Flight controller, and need a software tool called Zadig to replace the driver for you F.Cwhen you flash firmware at the first time.(N otice:If you've run the above steps before, then you don't need to repeat, starting directly from the 6th step)05Flash firmware for FCFor quick plug, Flight Controller additionally provide:●One6p cable (6-pin SH1.0terminal) for the power & signalbetween ESC and Flight controller;●One3p cable (4-pin SH1.0terminal) for SBUS receivers;●One3p cable (4-pin SH1.0terminal) for PPM receivers;●One5p cables(5-pin SH1.0terminal) for LED,Buzzer;Recommend Raptor S-Tower 20A 4in1 ESC,Assemblywill be more simple.● Please don'tflash any otherfirmware for FC except“OMNIBUSF4”.● does not need to set the port.PPM receiverSBUS or PEKTRUM receiver needs to turn on the “Serial RX”of UART1port.●is any deviation between the detected voltage/current with actual situation, you can adjust the Scale value in the Betaflight-Power&Battery● If there● 3.3V ,5Vsupply is for low-current use only(3.3V 0.1A MAX, 5V 1mA MAX).●bserve polarity at all timesO. Check and double check before applying power.P in or making any connections.●ower offbefore unplugging ,pluggingK e m l r●e p magnets away fro the F ight Cont oller.D i●o everyth ng you can to prevent vibrations.● Please contact Flycolor sales or technical support for more information.251400-1102V1.0。
飞控控制卡扩展功能使用说明书

飞控控制卡扩展功能使用说明书1 温湿度使用说明...................................................................................................................... -2 -1.1 支持的传感器型号....................................................................................................... - 2 -1.2 支持的控制卡型号....................................................................................................... - 2 -1.3 传感器焊接说明........................................................................................................... - 3 -1.4 温度编辑注意点........................................................................................................... - 4 -2 红外遥控使用说明.................................................................................................................. - 5 -2.1 红外遥控器及接收头型号........................................................................................... - 5 -2.2 支持的控制卡型号....................................................................................................... - 5 -2.3 红外接收头焊接说明................................................................................................... - 6 -2.4 使用说明....................................................................................................................... - 7 -3. 恢复出厂设置....................................................................................................................... - 10 -3.1 概述............................................................................................................................. - 10 -3.2 软件恢复出厂设置..................................................................................................... - 10 -3.3 硬件恢复出厂设置..................................................................................................... - 11 -1 温湿度使用说明1.1 支持的传感器型号1. A型—温度+湿度传感器:AM23012. B型—单温度传感器:DS18B201.2 支持的控制卡型号1. 支持A型—温度+湿度的卡型号如下:所有的二代卡(除A2)都支持;三代卡都支持(除SU3)。
傲翼飞控用户手册

高级设置 在此页面可以对图上所示参数进行获取和设置,其中刚进入此界面时输入框对每 个参数的范围都有范围限制,用户需遵循此数值范围进行参数设置。设置完成点击返 回,回到作业设置界面。
3.3 调参设置
点击功能界面中的“调参设置”进入调参设置界面。此界面中可以通过滑动进度 条对姿态、高度、速度进行调节。
说明
免责申明
请用户在使用本产品前,务必仔细阅读本说明。一旦使用本产品,即视为对本声明的所有 内容表示认可和接受。本产品适合 18 周岁以上人士使用。
本产品是一款适用于多旋翼飞行器的监控与设置软件。在供电正常和连接正确的情况下, 可以给用户提供卓越的飞行体验。在使用本飞控系统调试参数时,我们强烈建议您卸下螺旋 桨,并保证供电正常和相应的功能模块接线正确。使用时请务必远离人群,危险物品和易碎物 品。使用本产品时,发生以下原因直接或间接造成人身伤害和财产损失,傲翼飞控将不承担赔 偿责任: 1.用户没有按本手册及相应的调参软件要求使用; 2.用户在饮酒,吸毒,疲劳等身体或精神状态不佳的情况下操控飞行器; 3.用户主动或者有意操控飞行器制造伤害; 4.用户自行改装飞行器; 5.用户操作失误或主观判断失误造成的伤害; 6.飞行器自然磨损,电路老化等飞行器不正常工作造成的伤害; 7.用户在明知飞行器处于非正常工作状态下仍然操控飞行器造成的伤害; 8.用户在台风,冰雹,大雾等恶劣气象条件下仍然操控飞行器飞行; 9.用户在磁场干扰区域,无线电干扰区,政府禁飞区飞行造成的伤害; 10.用户在能见度不良,视线受到遮挡的情况下驾驶飞行器;
● 电池选型 电池共有 4 种,分别为 3s,4s,6s,12s,点击进入电池选型界面后,选择你想要的电 池类型,其图如下图所示。
Myflydream AP飞控 最新中文说明书
MyFlyDream AutoPilot使用手册V1.0注意事项感谢您购买MyFlyDream 飞控(以下简称MFD AP或者AP).请根据本文档熟悉本产品及其操作方法. 本产品是一款精密的电子设备. 请仔细阅读本文档以防止设备受损.本产品只适用于模型娱乐用途, 请在遵守当地相关法律规定的前提下使用. 因可靠性和精度受多个因素影响: 强烈的电磁干扰, 恶劣的GPS星况或者其他若干原因都可能导致不理想的效果. 使用本产品导致的所有风险和后果由用户承担.我们保留不停改进和提高产品性能的权利, 所以本文档的内容不一定与您手上的产品规格完全符合, 请到我们的网站下载本文档的最新版本:1.系统的组成2.工作原理和特点MFD AP内建三轴陀螺仪,三轴加速度计,三轴电子罗盘以及气压计等传感器。
AP用一个处理器专门负责飞控的姿态估算,另一个处理器则负责处理OSD画面和飞行逻辑。
基于这些软硬件,AP可以用于增加飞机的稳定度,或控制飞机按设计的航线和高度飞行,实现自动驾驶。
MFD AP的先进特性包括:1)全姿态的AHRS,最大滚动角速率为2000deg/s2)像素级的黑白双色OSD,刷新率>30fps,界面元素刷新无滞后3)集成对MFD AutoAntennaTracker(AAT)的支持,无缝接驳MFD自动跟踪天线系统4)通过OSD可实现所有参数的调节和航点的可视化设置,无须PC参与5)支持MAVLink协议,可以兼容开源地面站APM Planner,设置航点和实时显示飞行参数3.性能参数4.连接MFD AP的插针按功能可以分为A~J接口,如上图所示。
与周边主要设备连接示意图:A)Power此接口为飞控提供电源。
MFD AP可以用7~20V供电。
但因为AP提供给摄像头和图传的电源直接取自飞控的电源输入,所以建议使用12V为飞控供电。
这样可以直接让飞控供电给大多数12V的摄像头和图传,总体接线比较简洁。
B)CH1~CH6 Input此接口与RC接收机连接,读取来自RC接收机的6 个PWM通道信号。
飞控说明书

飞控使用说明本章旨在说明飞控的硬件组成,飞控的接口定义和使用方法以及安装时所需注意的事项。
一、硬件组成飞控板硬件:STM32F103VCT6+MPU6050+HMC5883+MS5611 并配有Flash芯片、五项开关和CP2102串口芯片,用于辅助调试。
◆STM32F103VC :32-bit ARM CortexM3处理器◆MPU-6050 :三轴陀螺仪+三轴加速度计;◆HMC5883L :三轴地磁传感器;◆MS5611 :气压高度计;◆CP2101:USB转串口芯片;◆AT45DB161 : Flash芯片,用于存放数据;◆五向开关:参数调节;二、接口定义◆ADC :接电池正负极,用于测量电池电压◆T8_4、T8_3、T8_2、T8_1 :TIM8四路接口(程序中未使用),可用于PWM、PPM输入捕捉,PWM输出,方便外设的拓展。
◆T4_C4 :PWM输入捕捉通道,接接收机的PITCH通道。
◆T4_C3 :PWM输入捕捉通道,接接收机的ROLL通道。
◆T4_C2 :PWM输入捕捉通道,接接收机的油门通道。
◆T4_C1 :PWM输入捕捉通道,接接收机的YAW通道。
◆T2_C1 :PWM输出通道,接1号电机。
◆T2_C2 :PWM输出通道,接2号电机。
◆T2_C3 :PWM输出通道,接3号电机。
◆T2_C4 :PWM输出通道,接4号电机。
(电机编号在后面说明)◆ 3.3V、DIO、CLK、GND : SWD接口,用于程序的下载。
◆GPS : GPS接口。
◆UART3 : 串口3接口,可用于外接蓝牙进行无线通信,也可用于接串口超声波模块,用于测量距离,进行超生波定高。
◆E3、E4、E5、E6 : 四路IO口,用于外设的拓展。
◆FRF2401: NRF2401无线接口,可用于数据传输。
◆OLED :液晶OLED接口,用于显示。
三、安装事项1、飞控的安装事项如图所示,安装时红色箭头指向前进方向,将飞控板固定到四旋翼中央,尽量保证平行于前进方向,不要有倾斜。
飞控板说明书v0.4
前言尊敬的顾客,感谢您购买香港科比特科技有限公司的MMC10型号的飞行控制器。
香港科比特科技有限公司致力于为客户提供安全可靠、性能稳定、操作灵活的多旋翼飞行器及控制器。
请您在使用MMC10控制器之前请仔细阅读本说明。
警告和免责申明MMC10是一款优秀的飞行控制系统。
和直升机相比,它能够为低高度多旋翼飞行器在狭小空间内提供卓越的飞行特性。
无论您的多旋翼飞行器尺寸如何,一旦装上MMC10它就不再是一个普通玩具。
尽管我们竭尽全力让控制器在上电时工作在最安全的状态,但是我们仍然强烈建议您在校准和设置参数时叏下桨翼,使用非动力电源为主控供电,并远离儿童。
因使用本产品而造成的直接或者间接损失与伤害,香港香港科比特科技有限公司公司概不负责注意事项1、本产品适合有丰富经验且年满14岁以上人士使用,初学者请避免独自操作本控制器,需有丰富经验的人士监督与指导。
2、请在身体和精神状态良好的情况下使用和操作本产品。
3、安装调试时候远离高速旋转的电机和桨叶,避免造成危险和伤害。
4、确保MMC与部件之间的连接正确、可靠。
5、请在遥控设备通信状态良好,电池电量充足的情况下使用该产品。
6、安装飞行器时,请确保飞行器重心在机架中心,有负载的在机架中心的垂直方向上。
7、安装主控器时,尽量安装在靠近中心位置,确保主控印有标记的一面朝上,并使其机身水平面保持平行,否则会导致飞行器水平方向飘移。
8、主控器安装有方向要求,务必使电调输出端口的朝向不飞行器机头方向一致。
9、控制器连接电池之前务必确认接口连接正确无误,并先打开遥控器,然后启动多旋翼飞行器!着陆后先关闭飞行器,再关闭遥控器。
10、在调试过程中请断开电调不电池的连接或移除所有桨翼。
11、更换遥控系统后一定要重启主控并重新校准遥控器。
12、在调参软件的遥控器校准中:油门:滑块向下减小油门,滑块向上增大油门。
尾舵:滑块向左机头向左,滑块向右机头向右。
俯仰:滑块向下左飞行器向后,滑块向上飞行器向前。
飞控WiFi控制卡操作手册

飞控W i F i控制卡操作手册标准化管理部编码-[99968T-6889628-J68568-1689N]飞控WiFi控制卡操作手册V目录1 概述WiFi控制卡与网络卡操作基本相同,只有WiFi连接以及对应的网络参数配置不同。
手册中将重点介绍WiFi配置部分。
节目内容编辑等请参见飞控卡相关使用说明或观看网站操作视频。
WiFi控制卡,当前只支持电脑软件更改节目内容,手机软件将在之后推出。
支持连接方式:WiFi直连局域网连接广域网连接(远程控制)WiFi配置途径:U盘设置网页设置软件通讯设置手册将按照不同连接方式下的操作进行介绍,详细请看对应章节。
2 WiFi直连WiFi直连:具有无线WiFi功能的电脑与控制卡直接通过WiFi连接控制卡。
硬件连接示意图软件操作2.2.1 WiFi连接在无线网络连接中,搜索控制卡的WiFi信号,并连接。
进行操作。
硬件连接示意图软件操作3.2.1 操作步骤步骤1:连接控制卡。
用U盘请忽略该步骤;用具有WiFi功能的电脑直连控制卡(参见)。
用手机连接控制卡(参见)步骤2:更改控制卡WiFi配置(参见)。
步骤3:通过局域网控制卡连接。
步骤4:设置屏参,编辑并发送节目。
(操作与串口和网络卡一致)3.2.2 手机连接控制卡手机连接控制卡WiFi,可以通过网页更改控制卡WiFi配置。
①选择网络卡控制卡的默认WiFi网络名:卡型号-MAC地址后4位如:MAC地址为②输入密码ACCF23216C8C的FK-BW4控制卡,它的默认WiFi网络:FK-BW4-6C8C3.2.3 WiFi 配置WiFi 设置,可以通过3种方式进行:U 盘直接导入;通过网页设置;软件连接时直接设置;3.2.3.1 通过U 盘导入WiFi 配置 软件工具菜单U 盘更改控制卡WiFi 配置③连接成功3.2.3.2 通过网页更改WiFi配置笔记本或者手机直连时,输入网址:通过局域网访问时,输入网址:局域网中的IP/;如:登陆用户名:fkuser密码:168注:需要输入两次模式选择:WiFi直连选择【直连】;局域网或广域网连接(远程控制)选择【路由】提示:选择直连时,可以不用更改路由参数;选择路由时,可以不用更改直连参数。
U1-12飞控说明书
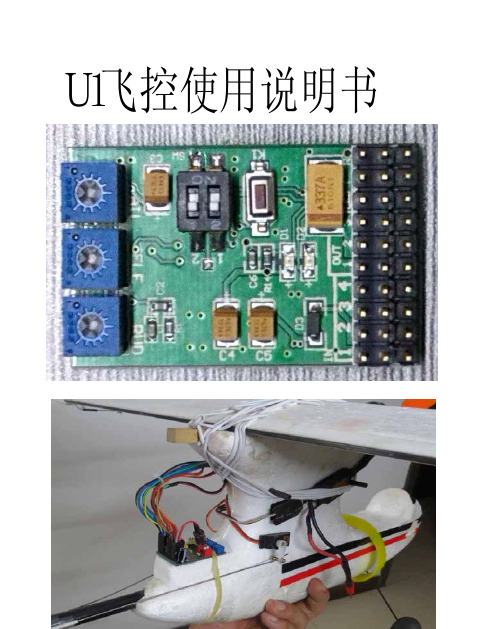
U2飞控使用说明书U1飞控使用说明书飞控各部件功能说明:信号输入:1-4通道分别为:1:副翼通道。
2:水平尾翼通道3:垂直尾翼通道1: 副翼通道信号输入:信号输出:1: 副翼通道2:水平尾翼通道3:垂直尾翼通道4:飞控模式选择开关(3段开关,依次分别为平衡模式、3D模式、手控模式)4:爆闪灯接口模式选择开关设置:正常布局固定翼飞翼V尾或倒V尾飞机标定传感器模式(加电初始化标定陀螺仪和重力传感器。
接通电池后,请将飞机水平稳定放置10秒以上,LED会闪烁,直到标定完成,LED常亮)4:飞控模式选择开关(3段开关,无GPS时,依次分别为平衡模式、3D模式、手控模式)GPS模式下,依次分别为平衡模式、定高飞行模式、自动返航模式(GPS未定位之前均为平衡模式)反馈电位器中间反馈最小,向两边为增益加大,一正一反的反馈。
飞控调试步骤:(此飞控的调试需要一定飞行常识,知道舵面控制飞机的原理)安装:将飞控水平放置于飞机上(尽量靠近重心位置),飞控头部向前(按照说明的箭头方向放置)。
飞控最好采取一定的减震措施,最好是皮筋悬空或加海绵减震。
输入端口的副翼、平尾、垂尾连接到遥控器接收机相应通道上,第四通道连接到遥控器一个3段开关上(2段开关也可,但没有位于中间的3D模式)。
调试:(请严格按照1、2、3、4、5的以下步骤调试)1:调节飞控反馈方向和幅度。
加电、遥控设定为平衡模式,这个时候,分别调节副翼通道增益、水平尾翼增益,电位器中间为增益最小,左右为相反的增益方向和大小。
调节到反馈方向正确、反馈大小适中即可(反馈过大会导致飞行中震荡)。
3:在遥控器上调节副翼通道、水平尾翼通道、垂直尾翼通道的正反控制。
是手动模式和平衡模式下,控制和舵面动作相一致。
4:调节遥控器微调。
将飞控调节到3D模式,此时,调节微调,使舵面长时间不偏移。
5:将飞机调节到手动模式,据此调节各个舵机的连杆,使舵面的角度到正常的适中位置。
6:如果飞机姿态不稳定、室内外温差太大、平衡模式下舵面偏移,请将飞控调节到初始化陀螺仪模式(将2个DIP开关都设置为ON位置,加电、把飞机水平放置,保持不动,直到LED灯不闪烁。
飞控WiFi控制卡操作手册
飞控WiFi控制卡操作手册V 1.0目录1 概述.........................................................2 WiFi直连 ....................................................2.1硬件连接示意图 .................................... - 4 -2.2 软件操作...............................................2.2.1 WiFi连接 ........................................2.2.2 控制卡连接.......................................2.2.3 其他操作与串口卡一致............................. 3局域网连接 ...................................................3.1硬件连接示意图 .........................................3.2 软件操作...............................................3.2.1 操作步骤.........................................3.2.2 手机连接控制卡...................................3.2.3 WiFi配置 ........................................通过U盘导入WiFi配置..............................通过网页更改WiFi配置..............................通过软件更改WiFi配置..............................3.2.4 局域网中控制卡连接............................... 4广域网连接(远程控制) .......................................4.1 单张屏连接.............................................4.1.1 硬件连接示意图...................................4.1.2 软件操作.........................................操作步骤...........................................配置...............................................控制卡端路由器配置.................................获取控制卡公网IP ..................................控制电脑端配置、连接...............................4.2 多张屏集群连接.........................................4.2.1控制卡端使用固定公网IP或者绑定域名方式(推荐)..硬件连接示意图.....................................软件操作...................................... - 3 -4.2.2 通知服务器方式...................................硬件连接示意图.....................................操作步骤...................................... - 3 -配置...............................................控制卡端路由器配置.................................控制电脑端路由器配置...............................软件操作...........................................1 概述WiFi控制卡与网络卡操作基本相同,只有WiFi连接以及对应的网络参数配置不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞控WiFi控制卡操作手册V 1.0目录1 概述WiFi控制卡与网络卡操作基本相同,只有WiFi连接以及对应的网络参数配置不同。
手册中将重点介绍WiFi配置部分。
节目内容编辑等请参见飞控卡相关使用说明或观看网站操作视频。
WiFi控制卡,当前只支持电脑软件更改节目内容,手机软件将在之后推出。
支持连接方式:✧WiFi直连✧局域网连接✧广域网连接(远程控制)WiFi配置途径:✧U盘设置✧网页设置✧软件通讯设置手册将按照不同连接方式下的操作进行介绍,详细请看对应章节。
2 WiFi直连WiFi直连:具有无线WiFi功能的电脑与控制卡直接通过WiFi连接控制卡。
2.1硬件连接示意图2.2 软件操作2.2.1 WiFi连接在无线网络连接中,搜索控制卡的WiFi信号,并连接。
2. 固定IP3局域网连接局域网连接:WiFi控制卡接入到无线路由器,再通过局域网内的电脑对控制卡进行操作。
3.1硬件连接示意图3.2 软件操作3.2.1 操作步骤步骤1:连接控制卡。
用U盘请忽略该步骤;用具有WiFi功能的电脑直连控制卡(参见)。
用手机连接控制卡(参见)步骤2:更改控制卡WiFi配置(参见)。
步骤3:通过局域网控制卡连接。
步骤4:设置屏参,编辑并发送节目。
(操作与串口和网络卡一致)3.2.2 手机连接控制卡手机连接控制卡WiFi,可以通过网页更改控制卡WiFi配置。
①选择网络卡控制卡的默认WiFi网络名:卡型号-MAC地址后4位如:MAC地址为ACCF23216C8C的FK-BW4控②输入密码制卡,它的默认WiFi网络:FK-BW4-6C8C默认密码:③连接成功3.2.3 WiFi配置WiFi设置,可以通过3种方式进行:U盘直接导入;通过网页设置;软件连接时直接设置;3.2.3.1 通过U 盘导入WiFi 配置软件工具菜单 U 盘更改控制卡WiFi 配置①选择WiFi 连接模式WiFi 直连选择【直连】;局域网或广域网连接(远程控制)选择【路由器】。
②设置直连时,控制卡的WiFi 网络名和密码。
③输入路由器无线网络名。
⑤输入路由器无线网络连接密码。
⑥设置控制卡接入无线路由器的网络配置。
⑦导入到U盘⑧把U 盘插到控制卡上,请查看LED 显示屏提示信息。
当显示“连接④选择路由器的加密方式和算法。
在路由器的无线网络安全设置里面可以找到。
3.2.3.2 通过网页更改WiFi配置笔记本或者手机直连时,输入网址:通过局域网访问时,输入网址:局域网中的IP/;如:登陆用户名:fkuser密码:168注:需要输入两次模式选择:WiFi直连选择【直连】;局域网或广域网连接(远程控制)选择【路由】提示:选择直连时,可以不用更改路由参数;选择路由时,可以不用更改直连参数。
360浏览器打不开时,请选择该浏览器的极速模式,如下:网页设置:3.2.3.3 通过软件更改WiFi 配置进入【通讯及屏参设置】和【控制卡网络维护】都可以进行更改配置。
模式选择:WiFi 直连选择【直连】;局域网或广域网连接(远程控制)选择【路由】➢ 【通讯及屏参设置】方式注意:提示设置成功后,请看LED 显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件在局域网中查找到控制卡了。
➢ 【控制卡网络维护】方式注意:提示设置成功后,请看LED 显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件①选择网络卡②选择WiFi④点击控制卡检测 ⑤检测成功,如失败请确认无线网络是否连接正确。
检测成功后,会显示控制卡当前WiFi设置。
如果需要改变WiFi 设置,点击【更改控制卡WiFi 设置】进行配置。
注:控制卡出厂配置,如下 WiFi 连接模式:直连 控制WiFi 名:控制卡型号-MAC 后四位(如:FK-BW4-AA4E ) WiFi 密码: 控制卡IP :(直连固定IP 时使用)③选择直接⑥勾选【更改控制卡WiFi 设置】⑦选择WiFi 连接模式⑧设置直连参数 ⑨设置连接路由器的网络参数⑩点击设置,发送更改后的配置到控制卡①点击IP 配置②选择WiFi 连接模式④搜索WiFi⑤选择WiFi ,输入密码。
③设置直连参数在局域网中查找到控制卡了。
3.2.4 局域网中控制卡连接进入【通讯及屏参设置】。
4.WiFi配置时,路由器选择错误了。
5.WiFi配置时,路由器密码设置错了。
6.WiFi配置时,IP设置错了。
广域网连接:WiFi控制卡接入到无线路由器,再通过电脑对控制卡进行远程操作。
注意:要能使用广域网远程通信功能,显示屏端的无线路由器必须要有端口转发功能;路由器如果没有端口转发功能,将不可以实现远程通信功能。
路由器端口转发配置后面有详细说明。
4.1 单张屏连接4.1.1 硬件连接示意图4.1.2 软件操作4.1.2.1 操作步骤步骤1:配置控制卡WiFi(参见局域网WiFi配置)。
步骤2:配置控制卡端路由器。
步骤3:控制电脑端配置,连接。
步骤4:设置屏参,编辑并发送节目。
(操作与串口和网络卡一致)4.1.2.2 WiFi配置远程控制单张控制卡的WiFi配置与局域网方式相同,WiFi连接模式请选择“路由器”模式,配置请参见。
4.1.2.3 控制卡端路由器配置➢需要对控制卡端的路由器进行配置,路由配置为虚拟服务器,将控制卡设定的端口转发到要通讯的控制卡IP上,如下图配置。
已生效的条目控制卡IP添加新条目➢花生壳域名设置保存生效ADSL路由器IP大部分都是动态的,路由器断电重开之后会获得新的公网IP,所在网络的控制卡的公网IP也是新的IP。
远程控制电脑,要想控制卡就得知道卡的公网IP,当路由器IP变化时,即卡的公网IP改变。
就得通过技术人员重新得到卡的IP,需要很高的维护成本。
使用一个域名绑定到控制卡,不管卡的公网IP如何变化,使用域名就系统自动得到IP地址,不需要任何人工维护。
➢注册一个花生壳,得到一个免费域名,花生壳➢使用路由器动态DNS,关联本路由器公网IP(即卡的公网IP)成功之后,在远程控制端,直接填入域名信息即可访问到控制,详细见【控制电脑端】章节。
4.1.2.4 获取控制卡公网IP无法使用域名方式来连接控制卡,需要知道控制卡的公网IP ,可以通过如下方式,获取控制卡的公网IP 。
得到控制卡公网IP 之后,可以告诉远程控制电脑端, 使用此控制卡的公网IP 来连接控制卡。
获取控制卡的公网IP 方法➢ 查看显示屏端的路由器管理界面①输入用户名密码,用户名密码要在花生壳网站注册②登录③登录成功,显示域名信息➢在显示屏端的办公电脑上,进入4.1.2.5 控制电脑端配置、连接➢使用域名来连接控制卡公网IP 公网IP➢使用控制卡的公网IP来连接控制卡控制卡的公网IP获取方式,详见其他操作同串口控制卡。
填入为控制卡申请的域名,显示屏路由器动态域名。
选择固定IP检测成功,连接正常填入为控制卡公网IP。
选择固定IP检测成功,连接正常4.2 多张屏集群连接注意:要能使用广域网远程通信功能,显示屏端的路由器必须要有端口转发功能;路由器如果没有端口转发功能,将不可以实现远程通信功能。
多张卡集群有两种硬件连接方式:➢控制卡端使用固定公网IP或者绑定域名方式(推荐使用)➢控制电脑端使用公网IP或者绑定域名方式,采用通知服务器连接。
4.2.1控制卡端使用固定公网IP或者绑定域名方式(推荐)为每个控制卡端的路由器申请花生壳域名并绑定,控制电脑通过域名控制每个屏。
4.2.1.1 硬件连接示意图注意:域名绑定都在显示屏端,一个屏一个域名。
4.2.1.2 软件操作控制卡端绑定域名的多张卡操作,与单张卡的操作一样,请参见4.2.2 通知服务器方式4.2.2.1 硬件连接示意图注意:域名绑定在控制电脑端。
4.2.2.2 操作步骤步骤1:控制卡WiFi配置。
步骤2:配置控制卡端路由器。
步骤3:控制电脑端配置,连接。
步骤4:设置屏参,编辑并发送节目。
(操作与串口和网络卡一致)4.2.2.3 WiFi配置WiFi连接模式请选择“路由器”模式。
通知服务器只能通过U盘或软件连接设置。
➢远程控制端使用固定IP—直连时软件直接设置集群模式,需要通知服务器远程控制电脑所在的公网IP自动填入当前所在的网络的公网IP设置到控制卡查看结果设置成功➢ 远程控制端使用固定IP —U 盘设置注意:请看LED 显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件在局域网中查找到控制卡了。
导入成功后,把U 盘插到控制卡上,请看LED 显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件在局域网中查找到控制卡了。
集群模式,需要通知服务器远程控制电脑所在的公网IP自动填入当前所在的网络的公网IP导入到U 盘➢ 远程控制端绑定域名—直连时软件直接设置控制电脑所在的公网IP 如果是动态,如果通知服务器采用IP 方式,当IP 改变的将找不到控制卡,连接控制卡失败。
这种情况,最好使用域名方式,控制电脑所在的公网IP 不管怎么变化,通过域名仍然可以得到IP 。
集群模式,需要通知服务器远程控制电脑的绑定的域名,及DNS 服务器的IPDNS 服务器IP 是控制卡所在的网络DNS IP ,大部分与网关一样,可以通过如下方法设置到控制卡查看结果设置成功DNS 服务器IP 获取,需要在控制卡所在的局域网中,通过一台电脑查看。
DNS 服务器的IP注意:请看LED 显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件在局域网中查找到控制卡了。
➢远程控制端绑定域名—U盘设置集群模式,需要通知服务器远程控制电脑的绑定的域名,及DNS服务器的IP设置DNS服务器IP导入到U盘导入成功后,把U盘插到控制卡上,请看LED显示屏右上角显示的设置结果,当显示“连接成功”时,表示控制卡已经成功连接到路由器。
接着就可以用软件在局域网中查找到控制卡了。
4.2.2.4 控制卡端路由器配置跟单张卡配置相同,再详细介绍下。
需要对显示屏端的路由器进行配置,路由配置为虚拟服务器,将控制卡设定的端口转发到要通讯的控制卡IP上,如下图配置。
以上显示屏端全部设置完毕4.2.2.5 控制电脑端路由器配置➢端口转发设置已生效的条目添加新条目控制卡IP保存生效➢ 花生壳域名设置控制电脑端路由器有固定公网IP 的情况不用设置花生壳域名。
成功之后,在控制卡每隔一定时间会通知到域名所对应的IP ,即可通知到控制电脑上的服务器。
见以下操作。
控制电脑局域网IP控制电脑局域网IP服务器端口①输入用户名密码,用户名密码要在花生壳网站注册②登录③登录成功,显示域名信息添加新条目4.2.2.6 软件操作步骤1:控制卡网络维护步骤2:绑定控制卡服务器收到的远程控制卡绑定到显示屏步骤3:进入屏参设置,检测控制卡绑定好的显示屏,会自动填写直接检测控制卡步骤4:其他操作与串口卡相同。