can总线控制多台电机实验.
基于CAN总线通信的双电机速度联动控制系统设计
! !系统整体方案设计
本文设计的双电机速度联动控制系统主要由上 位机运动控制器) 下位机伺服驱动器 $ % P N = 6 : 0 ) 9 ' 和伺服电机组成& 整体方案如图 $ 所示' 其中上位 机运动控制器采用了步科的触摸屏和 \ 是整个 Y P& 系统的主控制器& 除了对各节点伺服驱动器发送实 时过程数据对象$ 控制命令外& 还需要接收各 \ [ d% 驱动器节点的过程数据对象 $ 工作状态信息) \ [ d% 服务数据对象$ 确认信息以及节点监控和保护 4 [ d% 反馈信息& 将信息传送给触摸屏进行实时显示& 并根
" $ #
!!!!!!!!!!!!!!浙!江!理!工!大!学!学!报
" # $ %年 ! 第 ! !卷
据从站的反馈信息通过 P N = 总线通信对伺服驱动
, P N = 总线的应用层协议采用 P N = ' 0 *协 议 & P N = ' 0 *通 信 部 分 由[ 4 ! # $协 议 f f
实现& 伺服控制部分由 [ 伺服驱动 4 \ A # "协议实现, 器作 为 P 它通过 N = "接口 P N = ' 0 * 的 从 节 点& f 具有 P P N = 通信接口与 P N = 总线相连& N = ' 0 * f 的通讯功能& 负责控制电机的转速) 位置等对象, 触 摸屏 作 为 P 通过 N = $接口 P N = ' 0 * 的 从 节 点& f 负责给运动控制 P N = 通信接口与 P N = 总线相连& 器传输数据& 并根据上位机运动控制器反馈的信息 进行实时显示'
基于CAN总线的多无刷直流电机控制研究
基于CAN总线的多无刷直流电机控制研究
张海涛;窦满峰;郝晓宇
【期刊名称】《测控技术》
【年(卷),期】2012(031)004
【摘要】为实现多台无刷直流电机的远程独立控制,减少联接线缆,提高通信可靠性,设计并实现了基于CAN总线的双余度分布式控制网络.提出了适于多电机控制的时间触发型总线调度机制,降低了报文传输延时.针对CAN总线在无刷直流电机控制中易受干扰、通信错误率高的问题,分析了干扰产生的原因,从接口电路设计方面提出了共地、隔离及滤波等抗干扰措施.研究了CAN总线冗余方法.应用结果表明,该多电机分布式系统实时性好、通信稳定、冗余切换可靠.
【总页数】4页(P86-89)
【作者】张海涛;窦满峰;郝晓宇
【作者单位】西北工业大学自动化学院,陕西西安710072;西北工业大学自动化学院,陕西西安710072;西北工业大学自动化学院,陕西西安710072
【正文语种】中文
【中图分类】TM30
【相关文献】
1.基于CAN总线的测试用无刷直流电机控制器设计 [J], 史鹏飞;刘景林;谢映宏
2.基于CAN总线的多相无刷直流电机控制系统 [J], 宋诚;戴晶;李俊杰
3.基于CAN总线的无刷直流电机控制系统设计 [J], 陈国伟;丁学明
4.基于神经网络模糊PID控制的无刷直流电机控制系统研究 [J], 贾贇贺;张昕;周媛媛
5.基于线性二次最优控制的无刷直流电机控制器研究 [J], 水侊;邵欣;李云龙
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CANopen协议实现多电机系统实时控制

中图分类号:T M30112 文献标志码:A 文章编号:100126848(2009)0920053204基于C ANopen 协议实现多电机系统实时控制李 澄,赵 辉,聂保钱(哈尔滨工业大学控制与仿真中心,哈尔滨 150001)摘 要:以混合动力试验台的研制为背景,结合车辆控制中CAN 总线的普及应用,分析并采用CAN 总线的高层CANopen 协议,实现了试验台中多电机系统的实时控制。
提供的CANopen 主从站节点的构建与设置以及功能编程方法,在系统实际运行中得以充分验证。
相关实现方案适用于多数工业自动化应用场合。
关键词:CAN 总线;CANopen 协议;多电机系统控制;现场总线;电机控制I m ple m en t a ti on of Rea l 2ti m e Con trol of M ulti 2m otor Syste m sBa sed on CANopen Protocol L I Cheng,ZHAO Hui,N IE Bao 2qian(Contr ol and Si m ulati on Center,Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:Taking the devel opment of a HEV (Hybrid Electric Vehicle )test bench as the backgr ound,taking the popular app licati on of CAN bus in the vehicle industry int o account,this paper p resented a sche me t o i m p le ment the real 2ti m e contr ol of multi 2mot or syste m s in the test bench .One of CAN high layer p r ot ocol,CANopen had been analyzed and adop ted t o realize the real 2ti m e communicati on .Thebuilding and setting of the CANopen master and slave nodes,and relevant p r ogra m fl ow charts were p res 2ented in detail .Verified by the teat and operati on of the real syste m ,the sche me that app lied in this pa 2per is app licable in most industrial aut omati on app licati ons .Key W ords:CAN bus;CANopen p r ot ocol;Multi 2mot or syste m s contr ol;Fieldbus;Mot or contr ol收稿日期:20082052310 引 言CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络[1]。
基于CAN总线的多电机协调运动控制系统研究
2010年2月第38卷第3期机床与液压MACH I N E T OOL &HY DRAUL I CSFeb 12010Vol 138No 13DO I:10.3969/j 1issn 11001-3881120101031024收稿日期:2009-01-19作者简介:刘涛(1979—),男,讲师,主要从事工业机器人控制方面的研究。
E -mail:hrbeu411jys@1631com 。
基于C AN 总线的多电机协调运动控制系统研究刘涛,王宗义,孔庆磊,武光田(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘要:多电机协调运动控制系统在工业领域中的应用越来越广泛,深入研究多电机的协调运动控制,提高其同步精度具有重要的意义。
提出基于C AN 总线的多电机运动控制系统结构,设计基于SJA1000的具有C AN 总线通信功能的硬件模块和软件模块。
实际运行结果表明该运动控制系统的各项技术参数均满足工艺要求。
关键词:多电机协调运动;C AN 总线;SJA1000中图分类号:TP273 文献标识码:B 文章编号:1001-3881(2010)3-075-3Research on M ulti 2m otor M oti on Con trol System Ba sed on CAN BusL I U Tao,WANG Z ongyi,K ONG Q inglei,WU Guangtian(College of Aut omati on,Harbin Engineering University,Harbin Heil ongjiang 150001,China )Abstract:M ulti 2mot or moti on contr ol syste m is used more and more widely in industrial area .It πs i m portant t o i m p r oving syn 2chr onized accuracy of multi 2mot or moti on contr ol syste m.The structure of multi 2mot or moti on contr ol syste m was p r oposed based onCAN bus .The hard ware module and s oft w are module with the functi on of CAN bus communicati on were designed based on SJA1000.Practical results show the technical parameters of this contr ol system meet technol ogy require ments .Keywords:Multi 2mot or moti on contr ol system;C AN bus;SJA1000 运动控制在工业生产中的作用举足轻重,多电机协调运动控制是运动控制的一个重要分支。
基于CAN协议的多电机控制
基于CAN协议的多电机控制作者:李芃来源:《科技视界》 2014年第14期李芃(四川大学锦城学院,四川成都 610000)【摘要】根据CAN总线的技术规范,编制CAN总线高层通信协议,实现对电机群的协同控制。
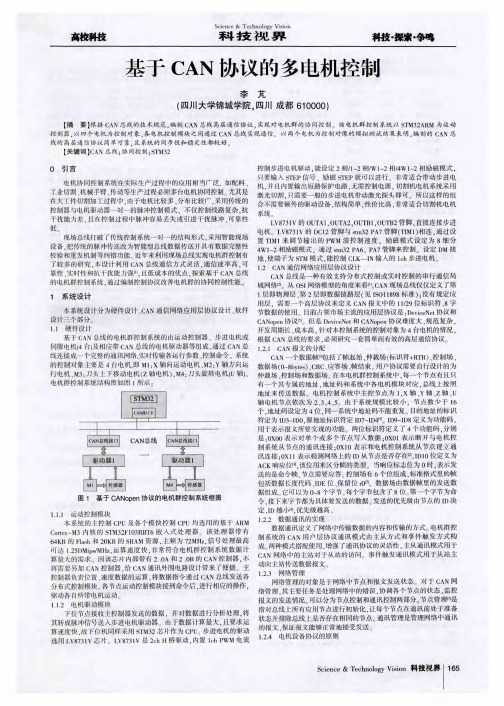
该电机群控制系统以STM32ARM为运动控制器,以四个电机为控制对象,各电机控制模块之间通过CAN总线实现通信。
以两个电机为控制对像的模拟测试结果表明,编制的CAN总线的高层通信协议简单可靠,且系统的同步性和稳定性都较好。
【关键词】CAN总线;协同控制;STM320引言电机协同控制系统在实际生产过程中的应用相当广泛,如配料、工业切割、机械手臂、传动等生产过程必须多台电机协同控制。
尤其是在大工件切割加工过程中,由于电机比较多、分布比较广,采用传统的控制器与电机驱动器一对一的脉冲控制模式,不仅控制线路复杂,抗干扰能力差,且在控制过程中脉冲容易丢失或引进干扰脉冲、可靠性低。
现场总线打破了传统控制系统一对一的结构形式,采用智能现场设备,把传统的脉冲传送改为智能型总线数据传送并具有数据完整性校验和重发机制等纠错功能。
近年来利用现场总线实现电机群控制有了较多的研究,本设计利用CAN总线通信方式灵活,通信速率高,可靠性、实时性和抗干扰能力强[1],且低成本的优点,探索基于CAN总线的电机群控制系统,通过编制控制协议改善电机群的协同控制性能。
1 系统设计本系统设计分为硬件设计、CAN通信网络应用层协议设计、软件设计三个部分。
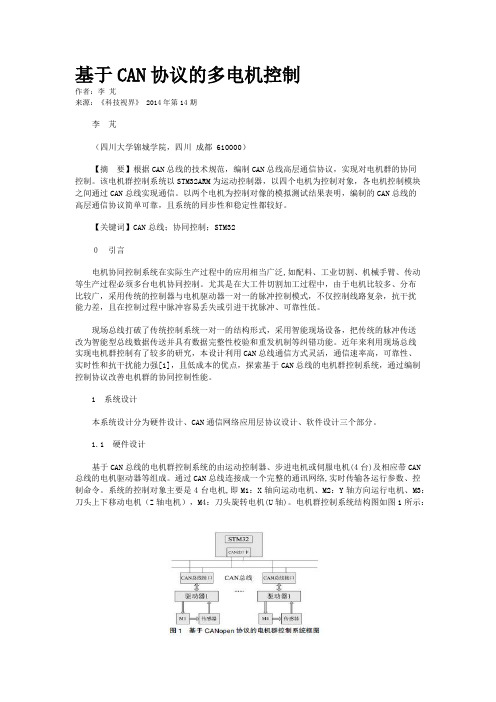
1.1 硬件设计基于CAN总线的电机群控制系统的由运动控制器、步进电机或伺服电机(4台)及相应带CAN 总线的电机驱动器等组成。
通过CAN总线连接成一个完整的通讯网络,实时传输各运行参数、控制命令。
系统的控制对象主要是4台电机,即M1:X轴向运动电机、M2:Y轴方向运行电机、M3:刀头上下移动电机(Z轴电机),M4:刀头旋转电机(U轴)。
电机群控制系统结构图如图1所示:1.1.1 运动控制模块本系统的主控制CPU及各个模快控制CPU均选用的基于ARM Cortex-M3内核的STM32F103RBT6嵌入式处理器。
基于CAN总线的步进电机多机控制系统的设计
在控 制器
的∀ 4 ∗ 5 接 口 协议 (
息
,
1 % 2 端 口 会依次
低 字节 写 入 ∀ # ∃ 控制
% &# ;∋ ∋ ∋ 和 ? ( ∀ ( , ∋ 之间加 人 高速光
向下 发送一 个 或 多个 双 字节的数据信
两个 模块 中的 单片机 处 理各自接
,
器 % # ∋ ≅ 】 数据 发送 缓冲 区 的 8 数 的 & =
双字节 数据位 的定义如 下 !
直 到 读 到的
节点模块 电路 的 设计
∀ 4 ∗ 5 缓 冲 区 中所有 数据 发 送完毕 (
∀ # ∃ 节 点 模块 的∀ # ∃ 接 口 部 分与
1 % Α 心# ∃ 接 口 转换模 块 的∀ # ∃ 接 口部
单片 机 退出 中断
,
等待 下 一 次 中 断
。
。
图+ 为转换模块 程 序流 程
。
分
别设 有 四个档位的速度 通 过改 变脉
冲 周期 改变速度
,
。
电机 行程 选 择 ! 从 ∋ ∋ ∋ ∋ 到
分 别代表 − 六 个不 同行程 的脉冲 数
图∗
/ #∃
。
. + (
软件 流程
0 ∀ 机发送的每 一 个 双字节数据都
,
,
节点模块 电路原 理 图
中给出 了从 陀 机的1 % 口 到∀ #∃ 总 线 2 的主要 元 件及其 连接
,
件作为∀ # ∃ 控制器的 % # 以刃 和 物理 &;
数 据发 送 完毕并对 方 收到
,
总线 间的接 口
和接收能 力
,
提供总线的差动发送
基于CAN总线的分布式多电机同步控制系统.
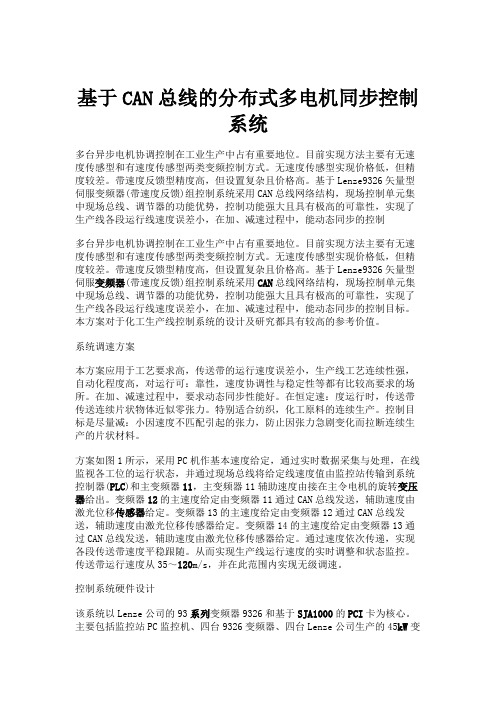
基于CAN总线的分布式多电机同步控制系统多台异步电机协调控制在工业生产中占有重要地位。
目前实现方法主要有无速度传感型和有速度传感型两类变频控制方式。
无速度传感型实现价格低,但精度较差。
带速度反馈型精度高,但设置复杂且价格高。
基于Lenze9326矢量型伺服变频器(带速度反馈)组控制系统采用CAN总线网络结构,现场控制单元集中现场总线、调节器的功能优势,控制功能强大且具有极高的可靠性,实现了生产线各段运行线速度误差小,在加、减速过程中,能动态同步的控制多台异步电机协调控制在工业生产中占有重要地位。
目前实现方法主要有无速度传感型和有速度传感型两类变频控制方式。
无速度传感型实现价格低,但精度较差。
带速度反馈型精度高,但设置复杂且价格高。
基于Lenze9326矢量型伺服变频器(带速度反馈)组控制系统采用CAN总线网络结构,现场控制单元集中现场总线、调节器的功能优势,控制功能强大且具有极高的可靠性,实现了生产线各段运行线速度误差小,在加、减速过程中,能动态同步的控制目标。
本方案对于化工生产线控制系统的设计及研究都具有较高的参考价值。
系统调速方案本方案应用于工艺要求高,传送带的运行速度误差小,生产线工艺连续性强,自动化程度高,对运行可:靠性,速度协调性与稳定性等都有比较高要求的场所。
在加、减速过程中,要求动态同步性能好。
在恒定速:度运行时,传送带传送连续片状物体近似零张力。
特别适合纺织,化工原料的连续生产。
控制目标是尽量减:小因速度不匹配引起的张力,防止因张力急剧变化而拉断连续生产的片状材料。
方案如图1所示,采用PC机作基本速度给定,通过实时数据采集与处理,在线监视各工位的运行状态,并通过现场总线将给定线速度值由监控站传输到系统控制器(PLC)和主变频器11,主变频器11辅助速度由接在主令电机的旋转变压器给出。
变频器12的主速度给定由变频器11通过CAN总线发送,辅助速度由激光位移传感器给定。
变频器13的主速度给定由变频器12通过CAN总线发送,辅助速度由激光位移传感器给定。
基于CAN总线多电机同步控制系统
摘要当今时代,多台电机的同步运动控制系统已经越来越广泛,随着总线协议的出现,又一步促进了同步控制系统在工业中前进的脚步。
为了适应现代工业上的发展,本文先去熟悉同步控制系统的工作和现场总线控制系统的原理,然后我采用了CAN总线协议经过转换模块把CAN协议转成RS-485/422协议可以传输给PLC,在通过PLC去控制多台电机的同步运动,实现工业上的需求。
经过CAN总线去控制多台电机同步运转可以更加准确的传输数据,也让控制系统更加的简便。
在自动控制领域PLC也起到了很大的促进作用,通过PLC的传输信号可以远程的控制苏需要设备,大大增加了工人的安全,也使得工业上更加方便。
关键词:多电机传动;同步控制;CAN总线;PLCAbstractIn today's era, the synchronous motion control system of multiple motors has become more and more extensive. With the advent of the bus protocol, it has further promoted the pace of the synchronous control system in the industry. In order to adapt to the development of modern industry, this article first familiar with the work of the synchronous control system and the principle of the fieldbus control system, then I used the CAN bus protocol to convert the CAN protocol into RS-485/422 protocol and transfer it to the PLC. In the PLC to control the synchronous movement of multiple motors to achieve industrial demand. Controlling the simultaneous operation of multiple motors via the CAN bus allows for more accurate data transfer and makes the control system easier. In the field of automatic control, PLC has also played a big role in promoting the remote control of the equipment needed by the transmission of the PLC, which greatly increased the safety of workers and made the industry more convenient.Key words: multi-motor drive; synchronous control; CAN bus; PLC目录1.1论文研究背景与意义 (3)1.2多电机同步控制的研究 (3)1.3 总线的研究 (4)1.4转换器模块 (4)2.系统的理论分析及方案的确定 (5)2.1多电机同步控制结构的分析 (5)2.2方案的确定 (6)3. 多电机同步控制系统的硬件设计 (6)3.1 PLC选型 (6)3.2变频器选型 (8)3.3 CAN总线接口电路 (9)3.4系统的调速设备主电路 (10)4. 多电机同步控制系统的软件设计 (11)4.1程序流程图 (11)4.2程序运行 (12)4.3 PLC程序的设计 (13)4.4 PCI-CAN适配卡 (14)结论 (15)参考文献 (16)1.绪论1.1论文研究背景与意义多电机的同步系统的使用已经慢慢地进入到了基本的工业之中。
基于CAN总线多电机协调控制系统性能研究
本文 以胶 带 机传 动控 制系 统为研 究背景 。胶带 机 是 一种 连 续运 输 机 械 , 泛 应用 在 矿 山、 广 钢铁 、 水泥 等 生产 线 , 既可 以运 送 成件物 品 , 也可 以运送 散 料 。由于 传送 距离 很长 , 带机 通常 采用 多 电机传 动 , 胶 即在胶 带
( 合肥工业大学 电气与 自动化 工程 学院 , 徽 合肥 安
200 ) 3 0 9
摘 要 : 分析 了以胶 带机 控制 系统 为背景 的 多电机 传动 协调 控 制 DC S系统模 型 和性能 , 在此 基础 上 引入 C AN 总
线 , 究 了系统 的性 能 ; 研 在分析 延 时产生 的原 因的基础 上 , 系统 的 实 时性 进 行 了研 究 , 出 了改进 方案 。 对 提 关键 词 : AN; 场 总线 ; 电机 协调 控制 系统 ; 时性 ; C 现 多 实 补偿 控 制 中图分类 号 : TM3 1 0 文献 标识 码 : B
维普资讯
2 4
《 电气 开 关 } 2 0 . . ) ( 0 6 No 5
文章编号 :0 4 2 9 20 ) 5 02 -0 10- 8X(0 60 - 0 4 4
基于 C AN 总 线 多 电机协 调 控 制 系统 性 能 研 究
冯义飞 陈 梅
服 的缺点 。如何 将 作为继 D S后 的新 一代 开放 性 、 C 低
成本 、 高可 靠性 控制 系 统 F S运 用 于 多 电机 传动 协调 C 控制得 到 了越 来越 多 的关 注 。
Abs r c : i p p r a ay e h ef r n e o a mo ie li —mo o t a t Ths a e n l s s t e p ro ma c fh r n z d mu t— t r DCS c n r l s se wh c s o to y tm ih i
CAN总线在多电机焊接系统中的应用

信; 完成对直流 电机 电压 、 电流数据的测试并传 输以 及直流电机转矩 、 转速 的检测 , 并进行 闭环控制等『 l 】 。
得N N A D更 适 合 于 存 储 经 常 需 要 更 新 的用 户 数 据 , 甚 至 是 文 件 系 统 ; 接 口方 面 , O 带 有 S A 接 在 N R R M
口, 足够 的地址 引脚 来 寻址 , 有 可直 接读 写 内部 的 每一个 字节 , 取较为方便 。 A D器件使用专 门的 存 N N I 口串行存取 数据 , 口较 为复杂 。 / O 接 各个产 品或厂 商 的 方法 各 不 相 同 , 般 采 用 8个 引脚 来 传 送 控 一
机运行参数 的设置和监控尤为重要。 多台电动机控制
系 统 如 图 1 示 , C N总 线 完 成 网络 的建 立 、 所 用 A 网络 信 号 的 传 递 、 线 控 制 以 及 与上 位 机 之 间 的 数 据 通 总
片 4B n x 1 a k 4M× 6位 (2MB 的 S R M(a s n 3 ) D A Sm ug
bn 6 即 片选 G S , 用 地 址 总 线 A 1 :】B n ak , C6使 [4 2 ,a k 选 择 A 4 A 5 数 据 总线 D[1 0, 与 C U 的 连 2 、2 , 3 :】其 P
接 如 图 3所 示 。
C K,KE L C ,
— — — — — — — — — — — — — — — — — — — — —
(4 5 3 ) K S6 2 1 6
基于CAN协议的多电机控制
S o f t w a r e 公 司出品 的 K e i l u V开 发
电机停 止
0 x 0 4
无参数 无参数 无参数
电机同步 启动命 令 O x O 5 初始化成功 0 】 【 O 6
—
S e n d l n i t( u 8 a d d r ) ,初 始化节 点 , a d d r 为 目标 地址 , 当 a d d r 值取 0 X 0 0时 . 表示广播 , 各节点都收到信息 ; v o i d C A N S e t C o ( u 8 a d d r , s 3 2 c o ) , 设置坐标 , a d d r 为目 标地址 , c o 为 设置 的坐标 : v o i d C A N S e t S p e e d ( u 8 a d d r , s 3 2 s p e e d ) , 设 置 速度 . a d d r 为 目标 地 址, s p e e d为设置 的速度 : v o i d US B L P CAN1 RX0 I R Q H a n d l e r ( v o i d ) , 下位机 C A N 1接 收 中断处理 函数 , 更新线圈和寄存器 。 通过 s w t i c h 语句来实现不 同信息
实 际 应 用 于 工 件 切 割 、 数 控 钻 孔 。 e
【 参考文献 1
[ 1 ] 邬 宽明. C A N总线 原理和应用 的系统设计 『 Ml 北京: 北京 航空航 天大学 出版
社. 1 9 9 6 .
[ 2 ] 麦毅强 , 倪文 秀, 王仁龙 . 基于 D S P的 C A N总线通信 技术研究 f J 1 . 微计算 机信
v o i d C AN
基于CAN总线的分布式电机控制

摘要本文探讨的是利用CAN总线的接口技术实现对从属电机转速的实时调控的系统,此次实验以C51单片机为控制核心进行数据的收发、处理,并设计相应的上位机程序实现PC机与MCU的通信,将各个从属单片机的发送的电机速度通过CAN反馈到PC机软件界面以供实时查看,并且通过上位机发送电机的速度至下位机,所要接受调控的电机所处的MCU便接受此数据并调节点击相应的速度。
该实验结果表明该系统工作稳定,人机界面合理易用,实时图像监控及各个电机状态控制良好,并可以为系统升级作了接口。
关键词:C51单片机; SJA1000; 串口通信; CAN总线目录0引言 (2)0.1 系统工作流程 (3)0.2 系统各个组成部分及其功能介绍 (3)0.3 系统各个组成部分的核心部件或技术 (4)1 系统设计 (4)1.1 硬件电路设计 (4)1.2节点主要元件电路原理 (5)1.3系统总体核心电路设计原理 (6)1.4 软件设计 (7)2.系统测试 (10)3结语 (10)4 参考文献 (11)5 致谢 (11)0引言CAN总线是控制器局域网总线的简称,它属于现场总线范畴,是一种能有效支持分布式控制或实时控制的串行通信网络,它可将挂接在现场总线上作为网络节点的智能设备连接成网络系统,并进一步构成自动化系统,从而实现基本的控制、补偿、计算、参数修改、报警、显示、监控、优化及控管一体化的综合自动化功能。
CAN总线智能节点在分布式控制系统中起着承上启下的作用。
它位于传感器和执行机构所在的现场,一方面和上位机进行通信,以完成数据交换;另一方面又可根据系统的需要对现场的执行机构或者传感器进行控制和数据采集。
它常常将一些简单的过程控制程序放在底层模块中,从而减少了通信量,提高了系统控制的实时性。
0 系统陈述0.1 系统工作流程PC机(操控室)ID+速度主MCUCAN网络从MCU从MCU从MCU从MCUID:1电机ID:2电机ID:8电机ID:9电机SPEEDSPEEDSPEEDSPEED ID+SPEED ID+SPEE D图0.1 系统工作流程图首先工作人员利用计算机发送数据ID+速度,该数据被主MCU接收,该主MCU将数据发送到CAN网络上,各个从MCU均接收此数据,然后各个MCU对数据进行判断是否符合自己的ID,如果符合则接收此数据并将此速度发送至电机调整电机速度,同时将电机运转后的速度在发送到CAN网络上,主MCU就会从CAN上接收到此数据并传到计算机上供工作人员校审;如果不符合则将此数据丢弃并维持自己的状态。
基于CAN总线的多伺服电机同步控制
基于CAN总线的多伺服电机同步控制在印刷机械行业中,多电机的同步控制是一个非常重要的问题。
由于印刷产品的特殊工艺要求,尤其是对于多色印刷,为了保证印刷套印精度(一般≤0.05mm),要求各个电机位置转差率很高(一般≤0.02%)。
在传统的印刷机械中,以往大都采用以机械长轴作为动力源的同步控制方案,但机械长轴同步控制方案易出现振荡现象,各个机组互相干扰,而且系统中有许多机械零件,不方便系统维护和使用。
随着机电一体化技术的发展,现场总线技术不断应用到各个领域并得到了广泛的应用。
本文针对机组式印刷机械的同步需求,提出了一种基于CAN现场总线的同步控制解决方案,并得以验证。
一、无轴传动印刷机控制系统的同步需求机组式卷筒印刷机一般由给纸机组、印刷机组、张力机组、加工机组和复卷机组等机组组成。
在传统的有轴传动印刷机中,动力源由异步电机通过皮带轮带动一根机械长轴(约10-20m),然后通过长轴带动各机组的齿轮、凸轮、连杆等传动元件,再通过传动元件带动设备的执行元件完成设备的输人、输出任务。
卷筒印刷机要求印刷速度为300m/min,套印精度≤0.03mm,为了满足套印精度,要求在各个机组定位精度≤0.03 mm。
在印刷机印刷过程中,要求各机组轴与机械长轴保持一定的同步运动关系,能否很好的实现各个机组轴的同步关系,将直接影响到印刷速度、套印精度等。
其中,给纸机组、印刷机组要求与主轴转动速度成一定的比例关系,张力机组根据不同的印刷速度调整张力系数,加工机组需要与主轴保持凸轮运动关系,而复卷机组的运动规律,要求随着纸卷直径的增大而减小。
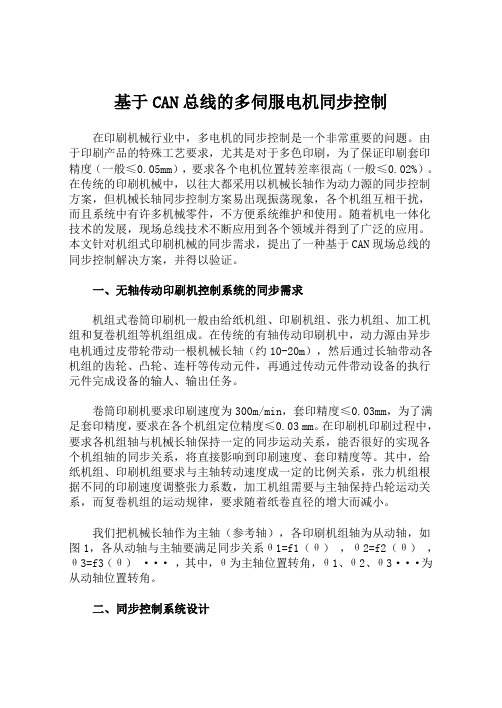
我们把机械长轴作为主轴(参考轴),各印刷机组轴为从动轴,如图1,各从动轴与主轴要满足同步关系θ1=f1(θ),θ2=f2(θ),θ3=f3(θ)···,其中,θ为主轴位置转角,θ1、θ2、θ3···为从动轴位置转角。
二、同步控制系统设计考虑到印刷机中同步运动关系复杂,套印精度高、印刷机组点多、分散,多操作子站,印刷生产线长等特点,采用全分散、全数字、全开放的现场总线控制系统FCS,总线的选择选用CAN总线。
基于CAN总线的多伺服电机同步控制
基于CAN总线的多伺服电机同步控制在印刷机械行业中,多电机的同步控制是一个非常重要的问题。
由于印刷产品的特殊工艺要求,尤其是对于多色印刷,为了保证印刷套印精度(一般≤0.05mm),要求各个电机位置转差率很高(一般≤0.02%)。
在传统的印刷机械中,以往大都采用以机械长轴作为动力源的同步控制方案,但机械长轴同步控制方案易出现振荡现象,各个机组互相干扰,而且系统中有许多机械零件,不方便系统维护和使用。
随着机电一体化技术的发展,现场总线技术不断应用到各个领域并得到了广泛的应用。
本文针对机组式印刷机械的同步需求,提出了一种基于CAN现场总线的同步控制解决方案,并得以验证。
一、无轴传动印刷机控制系统的同步需求机组式卷筒印刷机一般由给纸机组、印刷机组、张力机组、加工机组和复卷机组等机组组成。
在传统的有轴传动印刷机中,动力源由异步电机通过皮带轮带动一根机械长轴(约10-20m),然后通过长轴带动各机组的齿轮、凸轮、连杆等传动元件,再通过传动元件带动设备的执行元件完成设备的输人、输出任务。
卷筒印刷机要求印刷速度为300m/min,套印精度≤0.03mm,为了满足套印精度,要求在各个机组定位精度≤0.03 mm。
在印刷机印刷过程中,要求各机组轴与机械长轴保持一定的同步运动关系,能否很好的实现各个机组轴的同步关系,将直接影响到印刷速度、套印精度等。
其中,给纸机组、印刷机组要求与主轴转动速度成一定的比例关系,张力机组根据不同的印刷速度调整张力系数,加工机组需要与主轴保持凸轮运动关系,而复卷机组的运动规律,要求随着纸卷直径的增大而减小。
我们把机械长轴作为主轴(参考轴),各印刷机组轴为从动轴,如图1,各从动轴与主轴要满足同步关系θ1=f1(θ),θ2=f2(θ),θ3=f3(θ)···,其中,θ为主轴位置转角,θ1、θ2、θ3···为从动轴位置转角。
二、同步控制系统设计考虑到印刷机中同步运动关系复杂,套印精度高、印刷机组点多、分散,多操作子站,印刷生产线长等特点,采用全分散、全数字、全开放的现场总线控制系统FCS,总线的选择选用CAN总线。
can总线控制多台电机实验

•机械与电子工程学院
制作人:**
基于CAN总线的分布 式电机控制
左边的微动开关接P35外部中断1,判断 can总线是否属于闲暇状态; 右边是串行通信芯片;
晶振接单片机图,外接电源和电解电容
SJA1000 芯片、两个光电耦合器及Can总线控制器
SJA1000 在电路中是一个总线接口芯片,通过它实现上位机与现场 微处理器之间的数据通信。该电路的主要功能是通过CAN总线接收来自上 位机的数据进行分析组态然后下传给下位机的控制电路实现控制功能,当 CAN总线接口接收到下位机的上传数据,SJA1000就产生一个中断,引 发微处理器产生中断,通过中断处理程序接收每一帧信息并通过CAN总线 上传给上位机进行分析。AT89C51是CAN总线接口电路的核心,其承担 CAN控制器的初始化、CAN的收发控制等任务。
08电气工程及自动化<1>班 组长:& 成员:**
设计方案电路框图(控制过程)
1、单片机驱动电机实 现电机的正反转、调速; 显示器 功率 驱动器方向控制Fra bibliotekCan总线
单片机
电机
2、电机速度反调回单 片机显示在显示屏
速度检测
电路板制作过程:
(1)、Protel 99 SE软件的使用 (2)、电路图绘制(生成sch文件) (3)、pcb图绘制 (4)、pcb板的雕刻 (5)、元器件的焊接 (6) 、Keil uVision3软件编程
基于CAN总线的步进电机多机控制系统的设计
基于CAN总线的步进电机多机控制系统的设计1 引言由于can 总线的系统集成特点,基于汽车车身控制系统的can 总线技术应用范围已经远远超越汽车控制领域,扩展到了机械工业、家用电器及传感器等各种其它测控领域,被国际公认为是重要的的工业现场总线。
作为运动控制对象,步进电动机作为一种将离散的电脉冲信号转化成角位移的机械执行装置,具有结构简单、成本低、定位精度高和无误差累积等优点,已被广泛应用于各种自动控制系统中。
随着微型计算机和微电子技术的发展,步进电机的这一性能必将得到更为广泛的应用。
因此对于can 总线的步进电动机控制研究具有十分明显的现实意义。
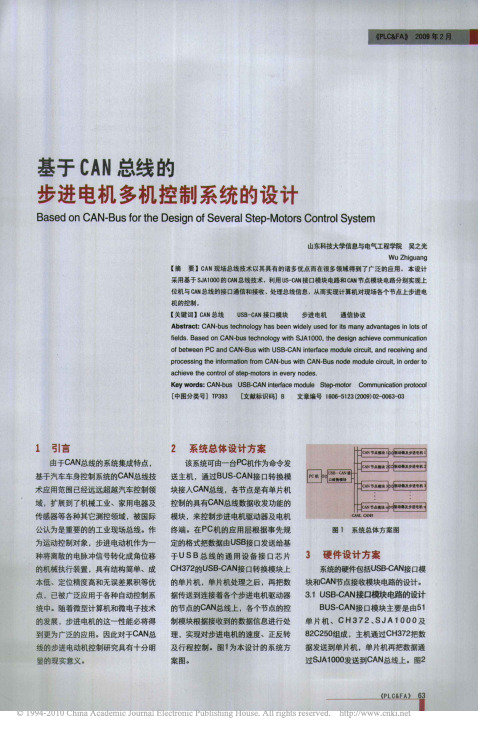
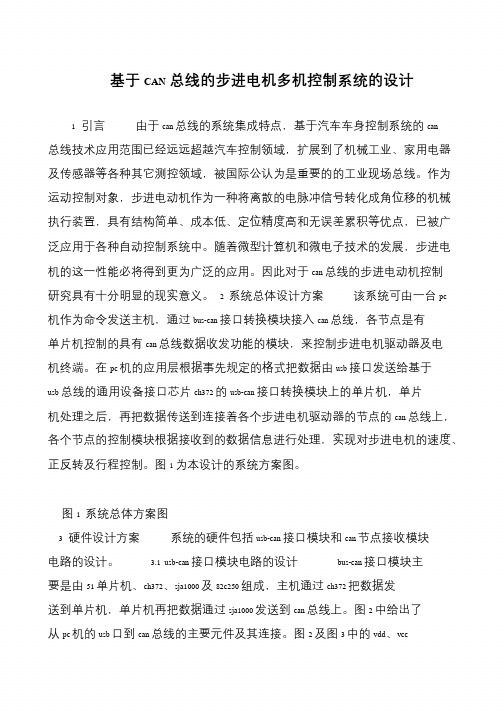
2 系统总体设计方案该系统可由一台pc 机作为命令发送主机,通过bus-can 接口转换模块接入can 总线,各节点是有单片机控制的具有can 总线数据收发功能的模块,来控制步进电机驱动器及电机终端。
在pc 机的应用层根据事先规定的格式把数据由usb 接口发送给基于usb 总线的通用设备接口芯片ch372 的usb-can 接口转换模块上的单片机,单片机处理之后,再把数据传送到连接着各个步进电机驱动器的节点的can 总线上,各个节点的控制模块根据接收到的数据信息进行处理,实现对步进电机的速度、正反转及行程控制。
图1 为本设计的系统方案图。
图1 系统总体方案图3 硬件设计方案系统的硬件包括usb-can 接口模块和can 节点接收模块电路的设计。
3.1 usb-can 接口模块电路的设计bus-can 接口模块主要是由51 单片机、ch372、sja1000 及82c250 组成,主机通过ch372 把数据发送到单片机,单片机再把数据通过sja1000 发送到can 总线上。
图2 中给出了从pc 机的usb 口到can 总线的主要元件及其连接。
图2 及图3 中的vdd、vcc。
基于CAN总线伺服系统的多电机同步控制算法的研究
In case of synchronization for multiple motors。the real time data communication
本文提出了用两台电机分担力矩,共同驱动同一个轴的伺服系统模型。在这 个系统中。两台电机速度和转角的精确同步是最关键的,根据这一特殊要求,本 文研究了已被广泛应用的非耦合控制算法和传统的耦合控制算法,提出了改进的 耦合控制算法对两台电机进行控制,并对几种控制算法进行仿真分析。当系统受 到动态干扰时,电机同步与跟踪系统给定值之间不能协调时,改进的耦合控制算 法强调两台电机的精确同步,而不是绝对地跟踪系统给定值。这一特点可以满足 本文所研究的特殊系统的要求。
synchronized drive ofmultiple motors must be taken seriously,thus,the synchronized
control of multiple motors iS very important.A successful synchronized control scheme must centrel be也the spacial and the tempoml aspects of the motion.In this
system,the velocity and position synchronization of the two motors iS the very
CAN总线在多电机软起动系统中的应用
CAN总线在多电机软起动系统中的应用
1 引言
随着国民经济的飞速发展,交流电动机在工业生产中扮演了极为重要的角色,作为各行业中的主要拖动电机,应用更为广泛。
众所周知,交流电动机在
全压起动时,起动电流达到额定电流的5~7 倍,会对电网造成冲击;起动转
矩约为额定转矩的2 倍,加剧机械结构磨损。
为了解决交流电动机的起动问题,通常需要使用软起动器进行软起动。
当前软起动器的监控一般由各自独立的监控单元进行,无法对整个系统实
现全面的控制和监测。
因此,建立一套数据通信系统将各软起动监控节点连接
起来,组成完整的监控网络就显得非常必要。
相对于RS-485 等通信标准,CAN(Controller Area Network)总线以其具有的诸多优点而在许多领域得到了应用。
CAN 总线是德国Bosch 公司于上世纪
80 年代初推出的一种多主局域网,CAN 通信网络是一种全分散、全数字化的
智能双向、多变量、多点、多站的分布式通信体系,具有可靠性高、稳定性好、抗干扰能力强、通信速度块、成本低等诸多优点。
CAN 总线是一种非常适合工业现场恶劣环境的通信方式。
本文介绍了一种基于CAN 总线的交流电机软起
动通信系统。
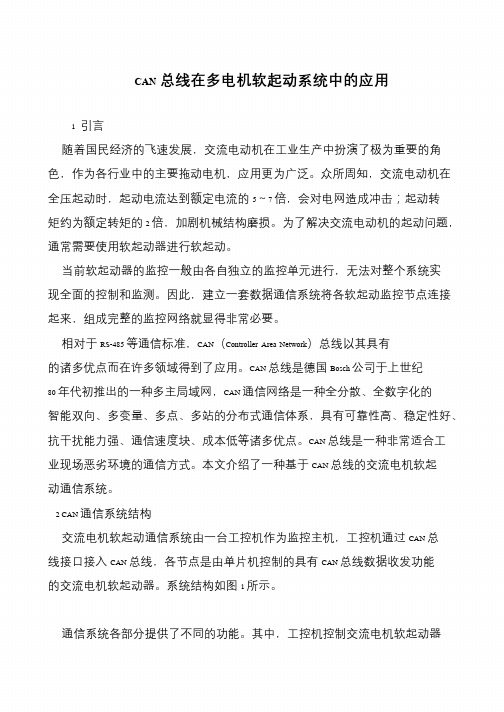
2 CAN 通信系统结构
交流电机软起动通信系统由一台工控机作为监控主机,工控机通过CAN 总
线接口接入CAN 总线,各节点是由单片机控制的具有CAN 总线数据收发功能
的交流电机软起动器。
系统结构如图1 所示。
通信系统各部分提供了不同的功能。
其中,工控机控制交流电机软起动器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
晶振接单片机图,外接电源和电解电容
SJA1000 芯片、两个光电耦合器及Can总线控制器
SJA1000 在电路中是一个总线接口芯片,通过它实现上位机与现场 微处理器之间的数据通信。该电路的主要功能是通过CAN总线接收来自上 位机的数据进行分析组态然后下传给下位机的控制电路实现控制功能,当 CAN总线接口接收到下位机的上传数据,SJA1000就产生一个中断,引 发微处理器产生中断,通过中断处理程序接收每一帧信息并通过CAN总线 上传给上位机进行分析。AT89C51是CAN总线接口电路的核心,其承担 CAN控制器的初始化、CAN的收发控制等任务。
电机驱动电路及控制接 口
P3.4为单片机PWM波输出口,用于控 制电机速度。P3.5为电机正反转控 制口。在电路图中我们可以看到, 不管P3.5状态如何,逻辑与门u1,u2 在任何时刻都是一开一闭,即R6、 R7处必有一处为低电平,假设R7为 低电平,当P3.4驱动信号为1时,R6 为高电平。电路三极管Q1、Q3开Q2、 Q4闭,电机电流从左向右,为正转。 反之P3.5改变状态后R6为低电平, Q1、Q3截止Q2、Q4开ቤተ መጻሕፍቲ ባይዱ电机反转。 即通过改变P3.5口状态来改变电机 转向。
Pcb图,刻板时用的图
焊接板正面
焊接板反面
学习板
液晶显示器及接口线
制作完成的电路板
制作完成的电路板
测试照片
测试现场
•机械与电子工程学院
制作人:**
基于CAN总线的分布 式电机控制
08电气工程及自动化<1>班 组长:& 成员:**
设计方案电路框图(控制过程)
1、单片机驱动电机实 现电机的正反转、调速; 显示器 功率 驱动器
方向控制
Can总线
单片机
电机
2、电机速度反调回单 片机显示在显示屏
速度检测
电路板制作过程:
单片机驱动电源及电机驱动电源
单片机电源5V 电机驱动电源12V 两个通过光电耦合 相互控制
两个20口插针,供外接芯片使用; 一个16孔插座,插显示器使用; 右面是接单片机P24—P27引脚控制显示屏的输出输入。
左边的微动开关接P35外部中断1,判断 can总线是否属于闲暇状态; 右边是串行通信芯片;
(1)、Protel 99 SE软件的使用 (2)、电路图绘制(生成sch文件) (3)、pcb图绘制 (4)、pcb板的雕刻 (5)、元器件的焊接 (6) 、Keil uVision3软件编程
(7)、产品调试(STC_ISP_V486软件辅 助)
电路图绘制
can总线控制 电机试验电路原 理图
电路图包括电 源、单片机、显 示器、电机驱动 及控制接口