利用3轴数字加速度计实现功能全面的计步器设计
基于单片机的计步器设计

基于单片机的计步器设计随着人们生活水平的提高和科技的不断进步,智能硬件设备已经成为我们日常生活的一部分。
其中,计步器作为一种监测身体运动的工具,越来越受到人们的喜爱。
而基于单片机计步器的设计,不仅具有较高的精度和稳定性,还能够有效地降低成本。
本文将详细介绍基于单片机计步器的设计思路和实现方法。
计步器作为一种运动监测工具,可以帮助人们有效地监测自己的运动量,进而控制饮食和调整运动计划。
传统的计步器多为机械式或电子式,但其成本较高、体积较大,不利于随身携带。
因此,设计一种低成本、便携式的计步器成为了一项重要需求。
基于单片机的计步器应运而生,成为了满足这一需求的有效解决方案。
基于单片机计步器的核心部件为单片机、加速度传感器和显示屏。
其中,单片机作为控制中心,负责处理加速度传感器采集的数据并控制显示屏的显示;加速度传感器用于监测步行时的加速度变化;显示屏则用于显示步数、距离、时间等数据。
电路连接方面,单片机与加速度传感器、显示屏等部件通过线路连接。
其中,加速度传感器通过AD转换将模拟信号转化为数字信号,再传输给单片机;单片机将处理后的数据传输给显示屏进行显示。
软件设计方面,我们采用C语言编写程序。
程序主要包括数据采集、数据处理和数据显示三部分。
数据采集部分负责读取加速度传感器的数据;数据处理部分将这些数据进行分析和处理,计算出步数、距离、时间等参数;而数据显示部分则负责将处理后的数据显示在显示屏上。
在实现单片机计步器的过程中,首先需要进行实验验证,以确定设计的可行性和稳定性。
实验中,我们需要采集不同步行速度和距离下的加速度数据,并对这些数据进行处理和分析,以得出准确的步数、距离和时间等参数。
实验验证不仅能够帮助我们检验设计的正确性,还能够为后续的实际应用提供参考。
数据采集和处理是单片机计步器的核心环节之一。
在实际应用中,我们需要通过加速度传感器采集步行时的加速度变化数据。
这些数据经过AD转换后,传输给单片机进行处理。
智能人体计步器的设计

智能人体计步器的设计智能人体计步器是一种可以记录人体步数、消耗卡路里、距离等信息的小型电子设备。
它可以帮助人们监测和管理自己的运动状态,从而更好地保持健康。
下面介绍一下智能人体计步器的设计。
一、硬件设计1、主控芯片:智能人体计步器需要一个高效的主控芯片来支持各种功能,例如数据处理、存储、显示等。
常用的主控芯片包括STMicroelectronics公司的STM32、国内芯片商全志科技的Allwinner等。
2、加速度传感器:为了计算步数,计步器需要内置高精度、低功耗的三轴加速度传感器。
在运动时,加速度传感器会感应出人体行走的速度和节奏,并将其转换成数字信号,进而计算出人体步数。
常用的加速度传感器有STMicroelectronics公司的LSM6DS3等。
3、显示屏幕:为了方便用户查看数据,智能人体计步器需要有一个显示屏幕。
一般采用OLED或LCD屏幕,大小为0.96寸或1.3寸。
其中OLED屏幕色彩鲜艳、亮度高、能耗低;LCD屏幕则更适合超大尺寸显示和长时间使用。
4、电池:智能人体计步器需要一个高性能的电池来驱动整个设备。
一般采用锂电池,容量在100mAh至300mAh之间。
选择合适的电池可大大延长计步器的使用寿命。
5、外壳:智能人体计步器的外壳一般为塑料材质,具备防水、防尘和抗震能力,外观美观大方。
1、数据采集:计步器需要不断采集加速度传感器的数据,并通过算法来计算出人体的步数、距离和消耗卡路里等信息。
2、数据处理:计步器需要对采集到的原始数据进行滤波处理,以消除噪声等干扰信号,并提取有用信息。
此外,还需要对数据进行校准和计算,得出比较准确的步数和消耗卡路里等信息。
3、数据存储:计步器需要内置存储芯片,将采集到的数据保存在里面。
这样,用户就可以随时查看历史数据,并了解自己的运动历程。
4、数据输出:计步器需要将采集的数据输出到屏幕上供用户查看,同时还需要支持蓝牙、WiFi等无线通信协议,以方便用户将数据上传到智能手机或电脑等设备上,进行进一步分析和处理。
基于单片机的三轴加速度计步器设计

片机连接电路如图 3 所 示。 单片机 的 P o 口接 L E D 显 示 电 路 。P 1 . 4, P 1 . 5 接
2 计步 器硬 件设 计
2 . 1 A DX L 3 4 5功能分析 A D X L 3 4 5是美 国 D I 公 司推 出的一 款低 成本 三 轴加 速
收 稿 日期 : 2 0 1 6— 1 1 —1 7
A D X L 3 4 5电路。P 1 . 6 , P 1 . 7所 接按钮 为步数 、 里程、 卡路 里 清零按钮 。
作者 简介 : 张
婷( 1 9 8 7 一 ) , 女, 山西吕梁人 , 硕士 , 研 究方向: 信号处理及 自动控制 。
第 6期
张婷 : 基 于单 片机 的三轴 加速 度计 步 器设 计
摘 要: 介绍 了基 于单 片机 设 计 的计 步 器。利 用人 在行 走 时 产 生的 三 向加 速 度 作 为计 步 器 触发 点 , 采用
A D X L 3 4 5三轴加速度传 感器实现从 感应人 运动时的加速度到计 算 出人行走 的步数 的转 变。在 传感 器 内部 的 A / D
转换器 , 通过模数转换将采 集来的加速度信号 转换 为数 字信 息并输送 到 S T C 8 9 C 5 2单 片机上进 行 处理 。单片机再
图2 A D X  ̄4 5连 接 电路 图
2 . 2 单 片 机 模 块 本文采用 单片机 S T C 8 9 C 5 2 , 内置 E E P R O M与 M A X 8 1 0
A D X L 3 4 5构成 。工作 过程 如下 : 传感 器 检测 到外 界物 理 运
动 的 三 个 方 向 的加 速 度 , 通 过 芯 片 内部 的 模 数 转 换 把 模 拟 信
ADXL345加速度传感器实现的计步器算法

ADXL345加速度传感器实现的计步器算法第一步是初始化传感器。
首先,需要设置传感器的工作模式和测量范围。
通常,计步器使用2g或4g范围来适应不同的运动强度。
然后,设置传感器的数据输出速率,通常选择比较低的速率,例如10Hz。
最后,在传感器上启动测量。
接下来是数据采集和预处理阶段。
传感器将连续采集三个轴上的加速度数据,并将其存储在一个缓冲区中。
采样频率将根据所选择的数据输出速率决定,例如10Hz的输出速率表示每秒采样10次。
预处理阶段可以分为两个步骤:低通滤波和重力加速度消除。
低通滤波可以用于去除高频噪声,并提取出比较平稳的运动分量。
重力加速度消除可以通过将低通滤波后的加速度数据减去1g的加速度(重力加速度)来实现。
这样可以得到只包含运动加速度的数据。
接下来是步数计算阶段。
步数计算通常基于峰值检测算法。
峰值检测算法用于检测加速度数据中的步伐峰值,从而实现步数的计算。
峰值检测算法通常分为两个阶段:步伐检测和步伐计数。
步伐检测阶段通过检测加速度数据的变化来确定是否发生了一步。
其基本原理是检测到连续的加速度上升和下降过程。
步伐计数阶段通过检测步伐检测阶段发出的峰值来计算步数。
当检测到一个峰值时,计数器加1最后,为了提高算法的准确性,还可以进行一些优化措施。
例如,动态阈值的使用可以根据运动强度自适应地调整步伐检测阶段的阈值。
此外,消除跑步和上楼等特殊情况的影响也可以进一步提高算法的准确性。
综上所述,使用ADXL345加速度传感器实现计步器算法可以通过初始化传感器,采集和预处理数据,以及步数计算等步骤来实现。
这种算法可以通过适当的优化来提高计步器的准确性和稳定性。
基于3轴加速度计ADXL345的全功能计步器设计

基于3轴加速度计ADXL345的全功能计步器设计摘要计步器是一种颇受欢迎的日常锻炼进度监控器,可以激励人们挑战自己,增强体质,帮助瘦身。
早期设计利用加重的机械开关检测步伐,并带有一个简单的计数器。
晃动这些装置时,可以听到有一个金属球来回滑动,或者一个摆锤左右摆动敲击挡块。
计步器功能可以根据计算人的运动情况来分析人体的健康状况。
而人的运动情况可以通过很多特性来进行分析。
比如人在运动时会产生加速度。
本文介绍了利用人运动时产生加速度变化来检测步数的计步器实现方案,利用具有体积小,功耗低,三轴高精度加速度传感器ADXL345,芯片内部即可把数据采集来的数据处理为数字数据,采集到加速度数据以后加以适当的算法就可以实现计步功能。
本文设计了一款基于加速度传感器ADXL345的计步器。
详细介绍了计步器的软件算法的实同时芯片中还集成了SPI和I²C接口,可以方便地将数据传输到主控芯片。
该系统设计简单,实现方便。
该芯片也可以扩展到其它需要测量加速度的应用场合,具有非常广阔的应用前景。
关键字:计步器加速度传感器ADXL345 低功耗Based on three accelerometer ADXL345 company-wide functionalpedometer designAbstractPedometer is a popular daily exercise, can inspire people progress monitors challenge yourself, enhanced physique, help thin body. Early design of mechanical switch detection using aggravated with a simple steps, and the counter. When shaking these devices, can hear a metal ball slide back and forth, or a pendulum swings around percussion block pieces.Pedometer function can according to the calculated a people's movement situation to analyze a healthy condition of body. But the person's movements can pass a lot of properties for analysis. Such as people in motion produces acceleration. This paper describes the use of people move to detect changes generated when the acceleration of steps, utilization of implementation scheme pedometer, small size, low power consumption, high ADXL345 three axis acceleration sensor, chip can put the data acquisition to internal data processing for the digital data acquisition to acceleration data, after appropriate algorithm can achieve plan step function. This paper introduces the design of a paragraph of the pedometer ADXL345 based on acceleration sensor. Introduces the software algorithm real pedometer while the SPI has integrated chip I²C interface, and I can be conveniently data transmission to the main control chip. The system is simple in design, realization convenient. The chip can also extend to other need to measure the applications, the acceleration is very broad application prospect.KEY WORDS pedometer acceleration sensor ADXL345 low power consumption目录中文摘要 (I)英文摘要 (II)1 绪论 (1)2 课题研究背景及意义 (2)2.1 光电计步器 (2)2.2基于射频技术的短跑训练计步器 (3)2.3 基于加速度传感器的计步器 (5)3 ADXL3XX系列产品简介及本次设计方案的提出 (5)3.1 ADXL335, ADXL345和ADXL346三轴加速度计的区别 (6)3.1.1 ADXL335的简介、特点及功能框图 (7)3.1.2 ADXL346的简介、特点及功能框图 (8)3.1.3 ADXL345的简介、特点及功能框图 (10)3.2 本次系统总体设计方案的提出 (13)3.2.1 ADXL345中断及寄存器功能分析 (13)3.2.2 系统总体设计方案 (15)4 系统硬件设计各模块电路 (16)4.1 传感器电路连接模块 (16)4.1.1 ADXL345的两种串行通信模式简介 (16)4.1.2 传感器模块连接 (18)4.2 微处理器模块 (19)4.3 EEPROM模块 (22)4.4 显示模块 (23)5 软件设计 (25)5.1 软件总体设计 (25)5.2 算法的实现 (26)6 结论 (32)致谢 (33)参考文献 (34)附录1 加速度计步器ADXL345简介 (36)附录2 整机电路图 (38)附录3 源程序 (38)1 绪论随着社会的发展,人们的物质生活水平日渐提高,人们也越来越关注自己的健康。
基于三轴加速度传感器的自适应计步器的实现
基于三轴加速度传感器的自适应计步器的实现
晏勇;雷航;周相兵;梁潘
【期刊名称】《东北师大学报:自然科学版》
【年(卷),期】2016(0)3
【摘要】分析人体行走的特点,设计了一种基于数字三轴加速度传感器与FPGA嵌入式处理器的自适应计步器.该系统包括步态信号采集、处理、显示、电源4个部分,利用步态信号周期性与单调性对其计数.数字三轴加速度传感器MMA8451采集步态信号,Stratix 10采用LMS自适应滤波算法对传感器输出数字步态信号进行平滑滤波与降噪处理,TFT液晶显示器显示当前行走步数.实验结果表明:该系统工作稳定、输出数据精度高,计数结果与人体运动状态、环境等因素无关,能精确完成人体行走步态信号采集与计数.
【总页数】5页(P79-83)
【关键词】三轴加速度传感器;嵌入式处理器;计步器;自适应;滤波
【作者】晏勇;雷航;周相兵;梁潘
【作者单位】阿坝师范学院物理与电子科学系;电子科技大学信息与软件工程学院;阿坝师范学院网络管理中心
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于单片机的三轴加速度计步器设计与实现 [J], 赵华峰
2.基于三轴加速度传感器的计步器的设计 [J], 陈蔚
3.基于三轴加速度传感器的老年人摔倒检测算法的设计与实现 [J], 汤引生;谢楠;何建强
4.基于三轴加速度传感器的频率自适应心脏起搏器运动-心率实验数据采集分析 [J], 吴雯倩;单虹颖;张千遥;丁彦斌;罗亚琦;郭萍
5.基于三轴加速度传感器的计步器的设计 [J], 陈蔚[1]
因版权原因,仅展示原文概要,查看原文内容请购买。
利用3轴数字加速度计实现功能全面的计步器设计 电子技术

利用3轴数字加速度计实现功能全面的计步器设计电子技术欢迎到访我的豆丁主页:(文档精灵)本文格式为WORD,能编辑和复制,感谢您的阅读。
利用3轴数字加速度计实现功能全面的计步器设计数字加速器计步器计步器是一种颇受欢迎的日常锻炼进度监控器,可以激励人们挑战自己,增强体质,帮助瘦身。
早期设计利用加重的机械开关检测步伐,并带有一个简单的计数器。
晃动这些装置时,可以听到有一个金属球来回滑动,或者一个摆锤左右摆动敲击挡块。
如今,先进的计步器利用MEMS(微机电系统)惯性传感器和复杂的软件来精确检测真实的步伐。
MEMS惯性传感器可以更准确地检测步伐,误检率更低。
MEMS惯性传感器具有低成本、小尺寸和低功耗的特点,因此越来越多的便携式消费电子设备开始集成计步器功能,如音乐播放器和手机等。
ADI公司的3轴加速度计ADXL335, ADXL345和ADXL346小巧纤薄,功耗极低,非常适合这种应用。
本文以对步伐特征的研究为基础,描述一个采用3轴加速度计ADXL345的全功能计步器参考设计,它能辨别并计数步伐,测量距离、速度甚至所消耗的卡路里。
ADXL345专有的(正在申请专利)片内32级先进先出(FIFO)缓冲器可以存储数据,并执行计步器应用的相关操作,从而最大程度地减少主处理器干预,为便携式设备节省宝贵的系统功率。
其13位分辨率(4 mg/LSB)甚至允许计步器以合理的精度测量超低速步行(每步加速度变化约55 mg)。
在可用于分析跑步或步行的特征当中,我们选择加速度作为相关参数。
个体(及其相关轴)的运动包括三个分量,分别是前向(滚动)、竖向(偏航)和侧向(俯仰),如图1所示。
ADXL345检测其三个轴x、y和z上的加速度。
计步器处于未知方向,因此测量精度不应严重依赖于运动轴与加速度计测量轴之间的关系。
图1. 各轴的定义欢迎到访我的豆丁主页:(文档精灵)本文格式为WORD,能编辑和复制,感谢您的阅读。
让我们考虑步行的特性。
基于3轴加速度计ADXL345的全功能计步器设计
基于3轴加速度计ADXL345的全功能计步器设计一、引言计步器是一种用于测量人体步数的设备,被广泛应用于健康管理、运动监测等领域。
本文基于3轴加速度计ADXL345,设计了一款全功能计步器,通过测量人体的步行运动来计算步数,并提供一些辅助功能,如距离测量、卡路里消耗等。
二、ADXL345加速度计简介ADXL345是一款微小、低功耗、3轴加速度计。
它可测量垂直于传感器平面的力、正负g力沿X、Y和Z三个轴的加速度。
ADXL345具有高分辨率(最高13位)、可调范围(±2g至±16g)和高速数据抽样率(最高3200Hz)等特点,适用于各种运动检测应用。
三、计步器设计原理计步器的设计原理基于人体行走时的加速度变化。
当人体行走时,腿部会受到地面的冲击力,导致加速度发生变化。
根据这一原理,可以通过检测加速度变化来计算步数。
四、硬件设计1. 硬件平台选择:Arduino Uno2.加速度计选型:ADXL3453.电源:使用锂电池供电4.显示屏:使用OLED显示屏显示步数、距离、卡路里消耗等信息5.按钮:提供用户操作界面,如重置步数、切换显示信息等五、软件设计1.初始化ADXL345:配置ADXL345为测量模式,设置测量范围、数据输出速率等参数。
2.获取加速度:通过ADXL345读取X、Y、Z三个轴上的加速度数据。
3.处理加速度数据:通过计算得到合成加速度,根据合成加速度的变化判断是否发生步行动作。
4.计步算法:使用阈值或峰值检测算法,统计步数。
5.显示数据:将步数、距离、卡路里消耗等信息显示在OLED屏幕上。
6.用户操作:通过按钮进行重置步数、切换显示信息等操作。
六、功能实现1.计步功能:通过加速度检测步行动作,实时计算步数。
2.距离测量:结合步长等因素,根据步数计算行走距离。
3.卡路里消耗:结合体重等因素,根据步数计算卡路里消耗量。
4.数据存储:将步数、距离、卡路里消耗等数据存储到EEPROM中,以允许断电后数据不丢失。
基于某加速度传感器ADXL345地计步器设计
基于某加速度传感器ADXL345地计步器设计设计基于ADXL345加速度传感器的计步器引言:步数计数是生活中常见的功能,如健康手环、智能手机等设备都可以记录我们的步数。
计步器能够帮助我们监控身体健康,鼓励我们进行适量的运动。
本文将介绍一种基于ADXL345加速度传感器的计步器的设计方案。
项目背景:ADXL345是一款高性能的三轴数字加速度传感器,能测量垂直和平行两个轴上的加速度。
通过对加速度的测量和分析,我们可以判断用户的步数。
设计方案:1.硬件设计-ADXL345传感器:ADXL345传感器是设计的核心部件。
它可以通过I2C或SPI接口与微控制器连接。
我们需要将其与微控制器进行连接并获取加速度数据。
-微控制器:我们需要选择一个合适的微控制器来处理传感器数据并计算步数。
一般来说,Arduino或者树莓派是常用的选择。
-电源模块:为了保证计步器的长时间工作,我们需要为整个系统提供稳定的电源。
电池或者电源适配器都可作为供电源。
-显示屏幕:为了让用户能够实时了解自己的步数,我们可以选择一块小型的显示屏,并将步数显示在上面。
2.软件设计-初始化设置:在软件设计的开始阶段,我们需要初始化ADXL345传感器,并配置其工作模式。
我们还需要对步数进行初始化,将其设置为0。
-数据采集:我们需要周期性地从ADXL345传感器中读取数据。
可以选择合适的采样率来确保数据的准确性。
-运动检测:利用加速度传感器的数据,我们可以检测到用户的运动。
当检测到一个运动周期时,我们可以认为用户迈出了一步,并将步数加1-步数计算:根据检测到的运动,我们可以开始计算步数。
我们可以将一连串的运动周期组合成一个步数。
-步数显示:将步数显示在屏幕上,以便用户时刻了解自己的步数。
3.测试与改进-在设计完成后,我们需要进行测试以验证计步器的准确性。
我们可以手动计数自己的步数,并与计步器的显示进行对比。
-如果计步器存在误差,可以通过调整阈值和其他参数来进行改进。
三轴加速度程序设计说明
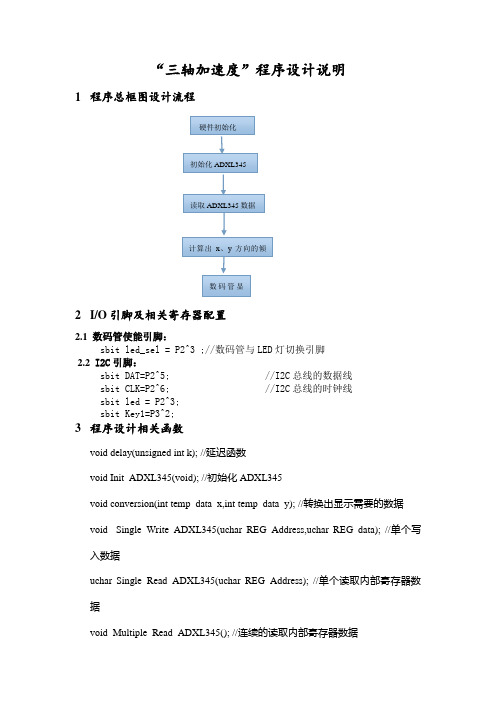
“三轴加速度”程序设计说明1程序总框图设计流程2I/O引脚及相关寄存器配置2.1 数码管使能引脚:sbit led_sel = P2^3 ;//数码管与LED灯切换引脚2.2 I2C引脚:sbit DAT=P2^5; //I2C总线的数据线sbit CLK=P2^6; //I2C总线的时钟线sbit led = P2^3;sbit Key1=P3^2;3程序设计相关函数void delay(unsigned int k); //延迟函数void Init_ADXL345(void); //初始化ADXL345void conversion(int temp_data_x,int temp_data_y); //转换出显示需要的数据void Single_Write_ADXL345(uchar REG_Address,uchar REG_data); //单个写入数据uchar Single_Read_ADXL345(uchar REG_Address); //单个读取内部寄存器数据void Multiple_Read_ADXL345(); //连续的读取内部寄存器数据void Delay5us(); //延时5微秒(STC90C52RC@12M)void Delay5ms(); //延时5毫秒(STC90C52RC@12M)void ADXL345_Start(); //起始信号void ADXL345_Stop(); // 停止信号void ADXL345_SendACK(bit ack); //发送应答信号bit ADXL345_RecvACK(); //接收应答信号void ADXL345_SendByte(BYTE dat); //向IIC总线发送一个字节数据BYTE ADXL345_RecvByte(); //从IIC总线接收一个字节数据void SEG_Display(); //数码管显示void Delay1(int n); //延迟函数void weixuan(char i); //位选。
基于加速度传感器ADXL345的计步器设计

基于加速度传感器ADXL345的计步器设计加速度传感器ADXL345是一种常见的三轴加速度传感器,具有高精度、低功耗和小尺寸等优点,广泛应用于计步器等移动设备中。
本文将详细介绍基于ADXL345的计步器设计。
首先,计步器的原理是通过检测人体行走时脚部的振动来判断步数。
加速度传感器可以检测出人体行走时脚部的振动,并将其转换为电信号。
因此,加速度传感器是计步器设计中必不可少的部件。
在ADXL345的设计中,首先需要进行传感器的连接和初始化设置。
一般情况下,ADXL345通过I2C接口与微控制器连接。
通过初始化配置,设置传感器的工作模式、测量范围和输出数据速率等参数。
接下来是计步算法的设计。
计步算法是计步器的核心部分,它通过分析加速度信号来判断人体的行走状态。
常见的计步算法有峰值检测法、阈值检测法和积分法等。
峰值检测法是最简单和常用的计步算法。
该算法基于人体行走时每一步的特征,当加速度信号超过一定阈值时,即判断为一步。
该方法的优点是简单易懂,但对传感器的灵敏度要求较高,容易受到噪声等干扰。
阈值检测法是一种改进的计步算法,它引入了动态阈值的概念。
通过分析加速度信号的波形特征,可以得出行走时的阈值。
通过动态调整阈值,可以提高计步的准确性。
积分法是一种更精确的计步算法。
该方法通过对加速度信号进行积分,得到速度和位移信号。
然后通过分析速度和位移信号的特征,判断人体的行走状态。
该方法的优点是准确性高,但需要进行复杂的信号处理和运算。
除了计步算法的设计,还需要设计界面和用户交互功能。
计步器的界面通常包括步数显示、消耗卡路里显示、运动距离显示等。
用户可以通过按键进行功能选择和设置。
在硬件设计方面,需要根据实际需求选择适当的微控制器和其他外围电路。
同时,还需要考虑电源管理和电路保护等问题,确保计步器的稳定性和可靠性。
最后,完成计步器的软件设计和调试。
根据计步算法的选择,编写相应的程序进行数据采集和处理。
通过数据的实时显示和对比,可以判断计步算法的准确性和稳定性。
利用三轴加速度传感器的计步测算法
利用三轴加速度传感器的计步测算法计步算法是利用三轴加速度传感器检测人体步态并计算步数的一种方法。
以下是一个简单的计步测算法,可以用来实现计步功能。
首先,我们需要理解什么是步态。
步态是指人体行走时的周期性动作,主要包括起步、摆动和着地三个阶段。
在起步阶段,人体重心逐渐向前移动,从而使一个脚离地。
在摆动阶段,人体通过抬腿和摆动腿部来推进身体向前。
在着地阶段,摆动的腿着地并承受身体重量。
计步测算法主要基于以下两个原则进行工作:1.步态检测:通过分析加速度传感器数据,检测出起步、摆动和着地阶段,从而判断是否产生了一次步行动作。
2.步数计算:通过步态检测的结果,统计步行动作的次数,从而计算出步数。
下面是一个简单的计步测算法的步骤:步骤1:采集数据通过三轴加速度传感器,采集人体行走时的加速度数据。
步骤2:滤波处理对采集到的加速度数据进行滤波处理,以消除噪音干扰。
步骤3:特征提取根据步态的周期性特征,提取加速度信号中的起步、摆动和着地阶段。
步骤4:步态检测通过对特征提取的结果进行分析,判断是否产生了一次步行动作。
例如,根据加速度信号的峰值和谷值,可以判断起步和着地阶段。
步骤5:统计步数根据步态检测的结果,统计步行动作的次数,从而计算出步数。
步骤6:重置计步器根据一定的条件,例如长时间不活动或者手动指定,重置计步器并清零步数。
这是一个简单的计步测算法,实际应用中还可以结合其他传感器数据,例如陀螺仪数据、磁力计数据等,进行更精确的步数计算。
同时,还可以通过机器学习等方法,优化算法性能,提高计步的准确性。
总的来说,利用三轴加速度传感器的计步测算法是一种简单实用的方法,通过分析人体步态来计算步数,可以广泛应用于智能手环、智能手机等移动设备中,实现计步功能,更好地服务于人们的健康与运动。
利用三轴加速器的计步测算方法
利用三轴加速器的计步测算方法随着现代生活质量提高,越来越多人开始注重自己的日常健康锻炼,计步作为一种有效记录监控锻炼的监控手段,已经广泛应用在移动终端的应用中。
但目前大部分实现都是通过GPS信号来测算运动距离反推行走步数,有效但是在室内或者无GPS信号的设备上无法工作,同时GPS精度对结果的干扰也比较大,本文提出一个新的测步方法,即通过设备上的加速器来计算步数,在不支持GPS的设备上也可正常工作,可用以与GPS互相配合测步,让应用的使用场景更加多样。
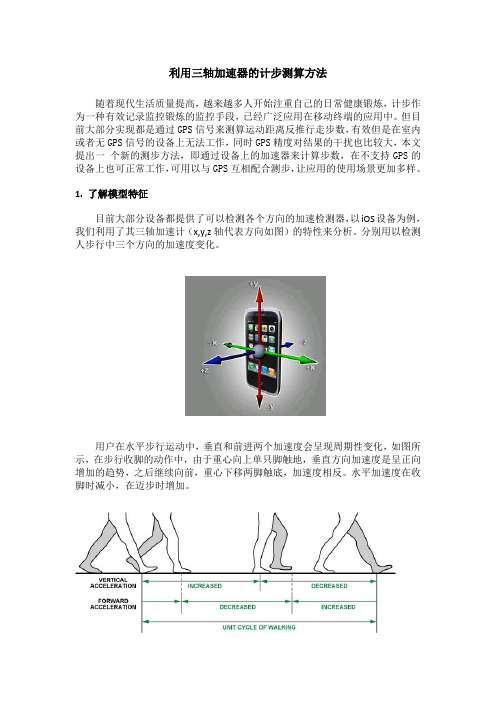
1. 了解模型特征目前大部分设备都提供了可以检测各个方向的加速检测器,以iOS设备为例,我们利用了其三轴加速计(x,y,z轴代表方向如图)的特性来分析。
分别用以检测人步行中三个方向的加速度变化。
用户在水平步行运动中,垂直和前进两个加速度会呈现周期性变化,如图所示,在步行收脚的动作中,由于重心向上单只脚触地,垂直方向加速度是呈正向增加的趋势,之后继续向前,重心下移两脚触底,加速度相反。
水平加速度在收脚时减小,在迈步时增加。
反映到图表中,我们可以看到在步行运动中,垂直和前进产生的加速度与时间大致为一个正弦曲线,而且在某点有一个峰值,其中垂直方向的加速度变化最大,通过对轨迹的峰值进行检测计算和加速度阈值决策,即可实时计算用户运动的步数,还可依此进一步估算用户步行距离。
2. 计步算法因为用户在运动中可能水平持设备或者将设备置于口袋中,所以设备的放置方向不定,为此我们通过计算三个加速度的矢量长度,获得一条步行运动的正弦曲线轨迹。
第二步是峰值检测,我们记录了上次矢量长度和运动方向,通过矢量长度的变化,可以判断目前加速度的方向,并和上一次保存的加速度方向进行比较,如果是相反的,即是刚过峰值状态,则进入计步逻辑进行计步,否则舍弃。
通过对峰值的次数累加可得到用户步行步伐。
最后是去干扰,手持设备会有一些低幅度和快速的抽动状态,或是我们俗称的手抖,或者某个恶作剧用户想通过短时快速反复摇动设备来模拟人走路,这些干扰数据如果不剔除,会影响记步的准确值,对于这种干扰,我们可以通过给检测加上阈值和步频判断来过滤。
利用智能手机三轴加速计实现计步器应用软件及商用价值

21世 纪 是 移 动 互 联 网 高 速发 展 的 时代 .而 移 动 互 联 网 是 商 业 价 值 进 行 评 估 的 目的 。以期 对 相 关 企 业 进 行 市 场 拓 展 及
将 移 动 通 信 与互 联 网有 机结 合 为 一 体 的 通 信 网 络【l1。在 移 动 评 估 进 行 一 定 意 义 上 的 指 导 。
的 App商 业 价 值 评 价 体 系 来 对 开 发 商 、运 营 商 等 的生 产 经 营
2)跑 步 方 式 :客 户 端 将 会 开 启 跑 步 模 式 ,记 录 步 数 和 里
发 技 术 已 经 成 为 移 动互 联 网产 业 的一 个 技 术 热 点 圆。然 而 ,移 1.1.1 系 统 用 户
动 终 端 的 商 业 生 态 圈 并 未 成 熟 翻,软 件 商 业 价 值 并 未 随 着 用
使 用 本计 步器 客 户 端 系 统 的 用户 运 动 方式 主要 有 两 种 :
户 大 量 涌 人 而 同 步 增 长 嗍.对 手 机 应 用 商 业 价 值 评 估 的 研 究
1)散 步 方 式 :用 户 不 进 行 激 烈 的运 动 ,仅 通 过 悠 闲 的散
仍 处 于 相 对 空 白。爆 发 式增 长 的 App商业 价 值 亟需 更 加成 熟 步 的 方 式 达 到 锻 炼 效 果 :
m obilephone three axis accU Jing,GU W en—lin (Business School,Hohai University,Nanjing210098,China)
Abstract:In order to sat isfy the requirement of using intelligent mobile phone three axis accelerometer realize pedometer function application software when users doing sports through the Andr oid development plat form,wit h the Eclipse,Andr oid SDK knowledge,etc.The clients achieve t he design and layout including interface,the servers and interaction,the local data stor age,etc.only need to motion a n d open mobile phones with software,users can record the movement of the information in time.But also they can get data storage and consult to establishing exercise plan.In addit ion,it also Ca n be used to share information at an ytime an d anywhere,SO as to create the good model which mix toget her entertainment a n d sports.So t his software is go d to use and full of commercial p o tentia l va lue,an d is worth to developing and promoting. Key words:Eclipse;Android SDK;layout;business value;mobile phone software
基于三轴加速度传感器的计步器的设计

基于三轴加速度传感器的计步器的设计作者:陈蔚来源:《数字技术与应用》2018年第09期摘要:本文介绍了利用ADXL335三轴加速度传感器组成计步器的设计方法。
讲述了ADXL335三轴加速度传感器的特点和使用方法,并从功能、硬件设计以及程序流程等方面介绍了该计步器的设计。
采用这种方案的计步器具有操作方便,稳定性高,性能稳定等特点。
关键词:三轴加速度传感器;计步器;数字滤波中图分类号:TP216 文献标识码:A 文章编号:1007-9416(2018)09-0181-03近年来随着全民健身意识的增强,人们越来越关注身体的健康。
各种强身健体方式中步行是一种科学、安全、时尚又易行的好方法。
计步器是一种步行锻炼时有效又方便的计量工具,通过统计步数、距离、速度、时间等数据,可以掌握运动量,估算行走距离,实时监控健身强度,以防运动不足或是运动过量。
所以计步器已成为一种日常锻炼中有用的便携工具。
早期的计步器采用振动传感器。
其平衡锤在上下振动时平衡被破坏,使一个触电出现通/断动作,再由计数器记录并显示来完成计步功能,也称机械式计步器。
误差偏大,但价钱便宜。
电子式计步器采用加速度传感器,通过检测人体行走时步态加速度的信号,然后通过相关软件算法计算出人体行走的步数,因而计步更精确,体积更小。
本设计的方案是采用三轴加速度传感器捕捉人体行走时三个方向的加速度,通过单片机的计算和分析,计算出人体行走的步数。
1 工作原理人体迈步过程中,重心会随着人体运动在一定范围内出现规律性的变化。
脚蹬地离开地面时,地面的反作用力会使垂直加速度开始增大,身体重心上移,当脚达到最高位置时,脚的垂直速度最小,但垂直加速度最大。
当脚向下落时,垂直加速度开始减小,落地时加速度达到最小值。
前向加速度由脚与地面的摩擦力产生,加速度最小值对应的是脚离开地面时,最大值对应脚抬最高处。
可见加速度变化一个周期就是人体运动的一步。
当把加速度传感器随身携带时,传感器的输出电压会随着人体的运动出现规律化的变化。
利用三轴加速器的计步测算方法

利用三轴加速器的计步测算方法计步测算方法是通过使用三轴加速器(也称为三轴加速度计)来测量人体行走或跑步时的加速度变化,从而估算步数和距离的方法。
三轴加速器是一种能够测量三个方向上的加速度的传感器,通常内置在智能手机、智能手表和运动追踪器等设备中。
计步测算方法的原理是基于行走或跑步时人体的加速度变化模式。
当我们行走或跑步时,身体会有上下震动的运动,而这些运动会导致设备上的三轴加速器检测到峰值或谷值的加速度变化。
通过检测这些峰值和谷值的数量和频率,可以估算出步数和距离。
具体的计步测算方法主要包括以下几个步骤:1.数据采集:使用三轴加速器采集相关数据。
设备会以固定的频率(如每秒钟采集一次)获取行走或跑步时的加速度数据。
2.数据预处理:对采集到的原始加速度数据进行预处理。
这包括滤波、去除噪声和计算合成加速度等步骤。
滤波可以去除高频噪声,使得数据更加平滑。
合成加速度是根据三轴加速度的向量计算得到的,用于表示综合的加速度变化。
3.步数估算:根据预处理后的数据,通过特定的算法来估算步数。
常用的算法包括阈值法、峰谷法和机器学习方法。
阈值法是设定一个特定的加速度阈值,当加速度超过该阈值时,认为检测到一步。
峰谷法是根据加速度的峰值和谷值数量来估算步数。
机器学习方法则是通过训练模型,利用大量标记好的数据来预测步数。
4.距离估算:通过估算的步数和步长来计算总体距离。
步长是根据用户的身高和步行或跑步习惯等因素来估算的。
一般认为步长在不同的人群之间存在一定的差异,所以可以根据用户的数据和实时反馈来动态调整步长。
5.结果展示:最后,将估算的步数和距离结果在设备上显示。
可以通过图表或实时数据来展示用户的行走或跑步情况,并提供相关反馈,如卡路里消耗、活动时间等。
需要注意的是,计步测算方法并不是完全准确的,因为它是基于加速度的变化来估算步数和距离的。
用户的步行或跑步方式、地形、设备的放置位置等因素都可能对结果产生一定的影响。
因此,在实际使用中,建议结合其他的传感器数据、用户的身体特征和实际情况来进行综合计算,以提高计步测算的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
表 3. 卡路里消耗与跑步速度的关系
跑步速度(km/h)
8
卡路里消耗(C/kg/h)
10
12
15
16
20
20
25
由表 3 可以得到公式(3)。
卡路里(C/kg/h) = 1.25 × 跑步速度(km/h)
(3)
以上所用的速度参数单位为 m/s,将 km/h 转换为 m/s 可得公式 4。
卡路里(C/kg/h) = 1.25 × 速度(m/s) × 3600/1000
虽然数据速率为 50 Hz,但 ADXL345 的片内 FIFO 使得处理器无 需每 20 ms 读取一次数据,极大地减轻了主处理器的负担。该缓 冲器支持四种工作模式:旁路、FIFO、流和触发。在 FIFO 模式 下,x、y、z 轴的测量数据存储在 FIFO 中。当 FIFO 中的采样数 与 FIFO_CTL 寄存器采样数位规定的数量相等时,水印中断置 1。 如前所述,人们的跑步速度最快可达每秒 5 步,因此每 0.2 秒刷 新一次结果即可保证实时显示,从而处理器只需每 0.2 秒通过水 印中断唤醒一次并从 ADXL345 读取数据。FIFO 的其它功能也 都非常有用。利用触发模式,FIFO 可以告诉我们中断之前发生 了什么。由于所述解决方案没有使用 FIFO 的其它功能,因此笔 者将不展开讨论。
本文以对步伐特征的研究为基础,描述一个采用 3 轴加速度计 ADXL345 的全功能计步器参考设计,它能辨别并计数步伐,测 量距离、速度甚至所消耗的卡路里。
ADXL345 专有的(正在申请专利)片内 32 级先进先出(FIFO) 缓冲器可以存储数据,并执行计步器应用的相关操作,从而最大 程度地减少主处理器干预,为便携式设备节省宝贵的系统功率。 其 13 位分辨率(4 mg/LSB)甚至允许计步器以合理的精度测量超 低速步行(每步加速度变化约 55 mg)。
图 7 显示了步伐参数的算法流程图。
图 7. 步伐参数算法流程图
Analog Dialogue 44-06, June (2010)
3
距离参数
根据上述算法计算步伐参数之后,我们可以使用= 步数 × 每步距离
(1)
每步距离取决于用户的速度和身高。如果用户身材较高或以较快
图 3. 从一名跑步者测得的 x、y 和 z 轴加速度的典型图样
图 2. 步行阶段与加速度模式
Analog Dialogue 44-06, June (2010)
/analogdialogue
1
算法 步伐参数 数字滤波器:首先,为使图 3 所示的信号波形变得平滑,需要一 个数字滤波器。可以使用四个寄存器和一个求和单元,如图 4 所 示。当然,可以使用更多寄存器以使加速度数据更加平滑,但响 应时间会变慢。
步伐迈出的条件定义为:当加速度曲线跨过动态阈值下方时,加 速度曲线的斜率为负值(sample_new < sample_old)。
峰值检测:步伐计数器根据 x、y、z 三轴中加速度变化最大的一 个轴计算步数。如果加速度变化太小,步伐计数器将忽略。
步伐计数器利用此算法可以很好地工作,但有时显得太敏感。当 计步器因为步行或跑步之外的原因而非常迅速或非常缓慢地振 动时,步伐计数器也会认为它是步伐。为了找到真正的有节奏的 步伐,必须排除这种无效振动。利用“时间窗口”和“计数规则” 可以解决这个问题。
利用 3 轴数字加速度计 实现功能全面的计步器
步器处于未知方向,因此测量精度不应严重依赖于运动轴与加速 度计测量轴之间的关系。
设计
作者:Neil Zhao
简介 计步器是一种颇受欢迎的日常锻炼进度监控器,可以激励人们挑 战自己,增强体质,帮助瘦身。早期设计利用加重的机械开关检 测步伐,并带有一个简单的计数器。晃动这些装置时,可以听到 有一个金属球来回滑动,或者一个摆锤左右摆动敲击挡块。
1011
145
100
50
1010
145
50
25
1001
100
25
12.5
1000
65
12.5
6.25
0111
55
6.25
3.125 0110
40
此算法使用 50 Hz 数据速率(20 ms)。采用 interval 的寄存器记录 两步之间的数据更新次数。如果间隔值在 10 与 100 之间,则说 明两步之间的时间在有效窗口之内;否则,时间间隔在时间窗口 之外,步伐无效。
= 4.5 × 速度(m/s)
(4)
卡路里参数随同距离和速度参数每 2 秒更新一次。为了考虑运动
者的体重,我们可以将公式 4 转换为公式 5。体重(kg)为用户输
入量,一个小时等于 1800 个 2 秒间隔。
卡路里(C/2 s) = 4.5 × 速度 × 体重/1800
= 速度 × 体重/400
(5)
由于此阈值每 50 次采样更新一次,因此它是动态的。这种选择 具有自适应性,并且足够快。除动态阈值外,还利用动态精度来 执行进一步滤波,如图 6 所示。
利用一个线性移位寄存器和动态阈值判断个体是否有效地迈出 一步。该线性移位寄存器含有 2 个寄存器:sample_new 寄存器 和 sample_old 寄存器。这些寄存器中的数据分别称为 sample_new 和 sample_old。当新采样数据到来时,sample_new 无条件移入 sample_old 寄存器。然而,sample_result 是否移入 sample_new 寄 存器取决于下述条件:如果加速度变化大于预定义精度,则最新 的 采 样 结 果 sample_result 移 入 sample_new 寄 存 器 , 否 则 sample_new 寄存器保持不变。因此,移位寄存器组可以消除高 频噪声,从而保证结果更加精确。
“计数规则”用于确定步伐是否是一个节奏模式的一部分。步伐 计数器有两个工作状态:搜索规则和确认规则。步伐计数器以搜 索规则模式开始工作。假设经过四个连续有效步伐之后,发现存 在某种规则(in regulation),那么步伐计数器就会刷新和显示结果, 并进入“确认规则”工作模式。在这种模式下工作时,每经过一 个有效步伐,步伐计数器就会更新一次。但是,如果发现哪怕一 个无效步伐,步伐计数器就会返回搜索规则模式,重新搜索四个 连续有效步伐。
“时间窗口”用于排除无效振动。假设人们最快的跑步速度为每 秒 5 步,最慢的步行速度为每 2 秒 1 步。这样,两个有效步伐的 时间间隔在时间窗口[0.2 s - 2.0 s]之内,时间间隔超出该时间窗口 的所有步伐都应被排除。
ADXL345 的用户可选输出数据速率特性有助于实现时间窗口。 表 1 列出了TA = 25°C、VS = 2.5 V、VDD I/O = 1.8 V时的可配置数 据速率(以及功耗)。
速度跑步,步长就会较长。参考设计每 2 秒更新一次距离、速度
和卡路里参数。因此,我们使用每 2 秒计数到的步数判断当前跨
步长度。表 2 显示了用于判断当前跨步长度的实验数据。
表 2. 跨步长度与速度(每 2 秒步数)和身高的关系
每 2 秒步数 0~2 2~3 3~4 4~5 5~6 6~8 >=8
跨步(m/s) 身高/5 身高/4 身高/3 身高/2 身高/1.2 身高 1.2 × 身高
如果用户在步行或跑步之后休息,则步数和距离将不变化,速度 应为 0,此时的卡路里消耗可以利用公式 6 计算(休息时的卡路 里消耗约为 1 C/kg/h)。
卡路里(C/2 s) = 1 × 体重/1800
(6)
最后,我们可以将所有 2 秒间隔的卡路里相加,获得总卡路里消 耗量。 硬件连接 ADXL345 易于连接到任何使用I2C®或SPI数字通信协议的处理 器。图 8 给出了演示设备的原理示意图,它采用 3V电池供电。 ADXL345 的/CS引脚连接到板上的VS,以选择I2C模式。利用一 个低成本精密模拟微控制器ADuC7024从ADXL345 读取数据, 执行算法,并通过UART将结果发送至PC。SDA和SCL分别为I2C 总线的数据和时钟引脚,从ADXL345 连接到ADuC7024 的对应 引脚。ADXL345 的两个中断引脚连接到ADuC7024 的IRQ输入, 以产生各种中断信号并唤醒处理器。
图 6. 动态阈值和动态精度
2
Analog Dialogue 44-06, June (2010)
表 1. 数据速率和功耗
输出数据
带宽
速率
IDD
速率(Hz)
(Hz)
代码
(µA)
3200
1600
1111
146
1600
800
1110
100
800
400
1101
145
400
200
1100
145
200
100
如今,先进的计步器利用MEMS(微机电系统)惯性传感器和复 杂的软件来精确检测真实的步伐。MEMS惯性传感器可以更准确 地检测步伐,误检率更低。MEMS惯性传感器具有低成本、小尺 寸和低功耗的特点,因此越来越多的便携式消费电子设备开始集 成计步器功能,如音乐播放器和手机等。ADI公司的 3 轴加速度 计ADXL335、ADXL345和ADXL346小巧纤薄,功耗极低,非常 适合这种应用。
图 9. 用户佩戴计步器步行或跑步时的测试情况 结论 ADXL345 是一款出色的加速度计,非常适合计步器应用。它具 有小巧纤薄的特点,采用 3 mm × 5 mm × 0.95 mm 塑封封装, 利用它开发的计步器已经出现在医疗仪器和高档消费电子设备 中。它在测量模式下的功耗仅 40 µA,待机模式下为 0.1 µA,堪 称电池供电产品的理想之选。嵌入式 FIFO 极大地减轻了主处理 器的负荷,使功耗显著降低。此外,可以利用可选的输出数据速 率进行定时,从而取代处理器中的定时器。13 位分辨率可以检 测非常小的峰峰值变化,为开发高精度计步器创造了条件。最后, 它具有三轴输出功能,结合上述算法,用户可以将计步器戴在身 上几乎任何部位。