【CN110271031A】一种升降夹紧型真空吸盘夹具及使用方法【专利】
真空吸盘吊具操作规程
真空吸盘吊具操作规程1. 引言真空吸盘吊具是一种常用于工业领域的提升设备,可用于搬运重物和提升货物。
为了确保使用真空吸盘吊具的安全性和有效性,必须遵守正确的操作规程。
本文档旨在提供使用真空吸盘吊具的操作指南,以确保操作人员的安全,并最大程度地减少意外和人员伤害的风险。
2. 真空吸盘吊具的基本原理真空吸盘吊具主要通过真空泵将大气压力下的气体抽出,形成负压区域,从而产生吸附力。
该吸附力使得真空吸盘吊具能够牢固地抓取和搬运物体,而不需要使用额外的机械装置。
真空吸盘吊具通常由真空泵、吸盘固定架、吸盘喉管和吸盘等组成。
3. 操作前的准备在开始操作真空吸盘吊具之前,请务必进行以下准备工作:•确认吊具的工作状态和性能是否正常,检查真空泵、吸盘固定架和吸盘等部件是否完好无损。
•确保工作区域的环境安全,移除可能妨碍操作的障碍物和杂物。
•使用合适的个人防护设备,包括手套、安全鞋等。
•阅读并熟悉真空吸盘吊具的操作手册,了解各个操作按钮和开关的功能及使用方法。
4. 操作步骤4.1 打开真空泵•确保真空吸盘吊具已经正确连接到电源,并保证电源供应的正常。
•按下真空泵的启动按钮,等待真空泵开始工作。
•观察真空表,确保系统内的真空度达到工作要求范围。
4.2 安装吸盘固定架和吸盘•根据需要,选择适当的吸盘固定架和吸盘尺寸。
•将吸盘固定架安装在真空吸盘吊具上,确保固定牢固。
•将吸盘安装在吸盘固定架上,并通过扭转或其他固定方式确保吸盘与吸盘固定架连接牢固。
4.3 吊起物体•将吸盘放置在需要吸附的物体上,将吸盘与物体表面充分接触。
•打开吸盘供气开关,确保吸盘与物体之间形成密封气囊,产生足够的吸附力。
•缓慢提升吸盘,确保物体牢固地吸附在吸盘上。
•当吸盘吊具完全提升物体时,确认物体已经稳固地固定在吸盘上。
4.4 搬运物体•将物体搬运到目标位置时,确保操作平稳,避免碰撞和颠簸。
•在搬运过程中,始终保持视线清晰,注意观察四周环境,避免碰撞到其他物体或人员。
真空吸盘的使用方法
真空吸盘的使用方法真空吸盘是一种多功能的工具,它可以用于物体的粘合、支撑、悬挂及其它多种用途。
它利用一定强度的真空压力,将目标物体紧紧吸附在托盘上,可以将物体支撑牢固,并使用更方便快捷。
本文通过讲解真空吸盘的运作原理以及使用方法,来帮助大家更好的使用真空吸盘。
一、真空吸盘的运作原理真空吸盘是一种利用真空吸力的多功能工具,它由外壳、真空阀、吸盘和汽油机组成,可以用于物体的粘合、支撑、悬挂及其它多种用途。
它利用一定强度的真空压力,将目标物体紧紧吸附在托盘上,可以将物体支撑牢固。
真空吸盘原理如下:先,在真空吸盘外壳中,放入汽油机,把汽油机电源开关打开,汽油机将大量的空气从外壳中吸出,产生真空吸压力。
然后,将真空吸盘的吸嘴贴紧物体表面,真空吸力将物体吸附在外壳上。
最后,可以通过调节真空阀,调节真空吸力,以达到目标物体支撑或粘合的目的。
二、真空吸盘的使用方法1、真空吸盘放置在平整的水平面上,确保真空吸盘吸盘底部的螺栓与垫圈牢固地固定在平整表面上,以防止真空吸盘被风吹动或物体滑离;2、打开真空吸盘电源开关,调节汽油机的转速以及真空阀的程度,确保真空吸力足够大;3、将真空吸盘吸嘴放在物体上,按压真空吸盘,保持物体贴合度;4、空吸盘可以用于悬挂、支撑、粘合、拆卸等多种用途,但是在使用时,也需要考虑物体重量及大小,以确保真空吸盘的牢固度。
三、真空吸盘的安全使用1、使用真空吸盘时,要保护好真空吸盘,避免损坏,并定期检查真空吸盘的潮湿度;2、使用真空吸盘时,要确保外壳完好,不要使用有损坏迹象的真空吸盘;3、使用真空吸盘时,调节真空阀,确保真空吸力足够大;4、使用真空吸盘时,要考虑物体大小及重量,以确保物体的支撑或粘合;5、使用真空吸盘时,应避免长时间使用,减少设备及物体的损坏。
四、总结真空吸盘是一种多功能工具,它可以用于物体的粘合、支撑、悬挂及其它多种用途,为中小型物体的搬运带来了许多方便。
此外,在使用真空吸盘时,也需要注意安全,以确保设备及物体的安全。
一种真空吸盘机械手[实用新型专利]
![一种真空吸盘机械手[实用新型专利]](https://img.taocdn.com/s3/m/0f136defeff9aef8951e0608.png)
专利名称:一种真空吸盘机械手
专利类型:实用新型专利
发明人:郑洪军,张庆庆,唐杰,穆春利,朱小款,韩昊学申请号:CN201420712193.9
申请日:20141124
公开号:CN204324385U
公开日:
20150513
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种真空吸盘机械手。
其包括机身(9)、与机身(9)连接的横向梁(10)、可沿横向梁(10)移动的横移机构(4)、至少一个吸盘组件(2)、与所述吸盘组件(2)连接的气路组件(1)、液压升降机构,所述横移机构(4)的两侧分别设有一个竖直并可上下移动的导柱(5),所述吸盘组件(2)可摆动地安装在一连接在两个导柱(5)底端的横梁(3)上,所述液压升降机构设置在横移机构(4)上,所述吸盘组件(2)通过所述液压升降机构带动其升降。
本实用新型能适应石板摆放位置不规则、石板表面粗糙等情况,具有吸取力大,能自动吸放板材等特点,可完成石材自动加工生产线、板材堆垛打包等场合的自动循环上板和卸板工作。
申请人:山东金瑞诺华兴机械有限公司
地址:256500 山东省滨州市博兴县乐安大街1678号
国籍:CN
代理机构:济南舜源专利事务所有限公司
更多信息请下载全文后查看。
【CN210189837U】一种升降夹紧型真空吸盘夹具【专利】
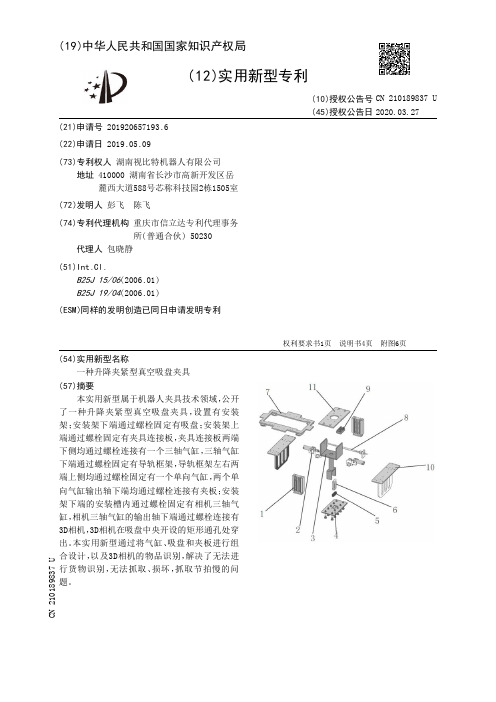
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920657193.6(22)申请日 2019.05.09(73)专利权人 湖南视比特机器人有限公司地址 410000 湖南省长沙市高新开发区岳麓西大道588号芯称科技园2栋1505室(72)发明人 彭飞 陈飞 (74)专利代理机构 重庆市信立达专利代理事务所(普通合伙) 50230代理人 包晓静(51)Int.Cl.B25J 15/06(2006.01)B25J 19/04(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种升降夹紧型真空吸盘夹具(57)摘要本实用新型属于机器人夹具技术领域,公开了一种升降夹紧型真空吸盘夹具,设置有安装架;安装架下端通过螺栓固定有吸盘;安装架上端通过螺栓固定有夹具连接板,夹具连接板两端下侧均通过螺栓连接有一个三轴气缸,三轴气缸下端通过螺栓固定有导轨框架,导轨框架左右两端上侧均通过螺栓固定有一个单向气缸,两个单向气缸输出轴下端均通过螺栓连接有夹板;安装架下端的安装槽内通过螺栓固定有相机三轴气缸,相机三轴气缸的输出轴下端通过螺栓连接有3D相机,3D相机在吸盘中央开设的矩形通孔处穿出。
本实用新型通过将气缸、吸盘和夹板进行组合设计,以及3D相机的物品识别,解决了无法进行货物识别,无法抓取、损坏,抓取节拍慢的问题。
权利要求书1页 说明书4页 附图6页CN 210189837 U 2020.03.27C N 210189837U权 利 要 求 书1/1页CN 210189837 U1.一种升降夹紧型真空吸盘夹具,其特征在于,所述升降夹紧型真空吸盘夹具设置有:安装架;安装架中间设置有连接管,连接管上下两端焊接有相互垂直的安装槽,安装架下端通过螺栓固定有吸盘;安装架上端通过螺栓固定有夹具连接板,夹具连接板两端下侧均通过螺栓连接有一个三轴气缸,三轴气缸下端通过螺栓固定有导轨框架,导轨框架左右两端上侧均通过螺栓固定有一个单向气缸,两个单向气缸输出轴下端均通过螺栓连接有夹板;安装架下端的安装槽内通过螺栓固定有相机三轴气缸,相机三轴气缸的输出轴下端通过螺栓连接有3D相机,3D相机在吸盘中央开设的矩形通孔处穿出。
一种真空吸盘[发明专利]
![一种真空吸盘[发明专利]](https://img.taocdn.com/s3/m/8ebd2a7bdaef5ef7bb0d3c33.png)
专利名称:一种真空吸盘
专利类型:发明专利
发明人:茹子俊,艾冬云
申请号:CN201611121731.7申请日:20161208
公开号:CN106499718A
公开日:
20170315
专利内容由知识产权出版社提供
摘要:一种真空吸盘,主要包括吸盘、压盘,在压盘顶上设有向外突出的气嘴,在气嘴里设有单向阀及定位套,压盘将吸盘压在吸附物表面,再用气泵通过气嘴将压盘与吸盘之间的空气抽走,使压盘与吸盘之间形成第一负压区,从而拉动吸盘向气嘴的方向变形,在吸盘与吸附物表面之间形成第二负压区,从而使吸盘吸紧在吸附物表面,第一负压区对压盘的吸力使压盘压紧在吸盘四周,从而使吸盘不易产生漏气。
申请人:中山市元亨家居用品有限公司
地址:528463 广东省中山市三乡镇南龙村“月地门”(宝盛商贸大厦)十二楼1210室
国籍:CN
更多信息请下载全文后查看。
吸盘夹具[实用新型专利]
![吸盘夹具[实用新型专利]](https://img.taocdn.com/s3/m/9798a314910ef12d2bf9e700.png)
专利名称:吸盘夹具
专利类型:实用新型专利
发明人:张艳婷,王明道,孙雪峰,黄利明申请号:CN201621011976.X
申请日:20160831
公开号:CN206088336U
公开日:
20170412
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种吸盘夹具,包括吸盘、横梁、至少一个固定梁和至少一个滑动梁,所述固定梁固定在横梁的底部,所述滑动梁滑动安装在横梁的底部并与固定梁平行,所述吸盘安装在固定梁和滑动梁的底部。
本实用新型将固定梁和滑动梁安装在横梁的底部,吸盘安装在固定梁和滑动梁的底部,利用滑动梁在横梁的底部相对固定梁滑动,使固定梁和滑动梁之间的距离可以调节,从而调节吸盘夹具的吸附面的大小,使吸盘夹具能适用于各种不同规定的工件的加持移动。
申请人:广州市泰立机电设备有限公司
地址:510000 广东省广州市白云区太和镇永兴工业区永兴西路23号
国籍:CN
代理机构:广州市一新专利商标事务所有限公司
代理人:王德祥
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910383485.X
(22)申请日 2019.05.09
(71)申请人 湖南视比特机器人有限公司
地址 410000 湖南省长沙市高新开发区岳
麓西大道588号芯称科技园2栋1505室
(72)发明人 彭飞 陈飞
(74)专利代理机构 重庆市信立达专利代理事务
所(普通合伙) 50230
代理人 包晓静
(51)Int.Cl.
B25J 15/06(2006.01)
B25J 19/04(2006.01)
(54)发明名称一种升降夹紧型真空吸盘夹具及使用方法(57)摘要本发明属于机器人夹具技术领域,公开了一种升降夹紧型真空吸盘夹具及使用方法,设置有安装架;安装架下端通过螺栓固定有吸盘;安装架上端通过螺栓固定有夹具连接板,夹具连接板两端下侧均通过螺栓连接有一个三轴气缸,三轴气缸下端通过螺栓固定有导轨框架,导轨框架左右两端上侧均通过螺栓固定有一个单向气缸,两个单向气缸输出轴下端均通过螺栓连接有夹板;安装架下端的安装槽内通过螺栓固定有相机三轴气缸,相机三轴气缸的输出轴下端通过螺栓连接有3D相机,3D相机在吸盘中央开设的矩形通孔处穿出。
本发明通过将气缸、吸盘和夹板进行组合设计,以及3D相机的物品识别,解决了无法进行货物识别,无法抓取、损坏,抓取节拍慢的问
题。
权利要求书2页 说明书4页 附图7页CN 110271031 A 2019.09.24
C N 110271031
A
权 利 要 求 书1/2页CN 110271031 A
1.一种升降夹紧型真空吸盘夹具,其特征在于,所述升降夹紧型真空吸盘夹具设置有:
安装架;
安装架中间设置有连接管,连接管上下两端焊接有相互垂直的安装槽,安装架下端通过螺栓固定有吸盘;
安装架上端通过螺栓固定有夹具连接板,夹具连接板两端下侧均通过螺栓连接有一个三轴气缸,三轴气缸下端通过螺栓固定有导轨框架,导轨框架左右两端上侧均通过螺栓固定有一个单向气缸,两个单向气缸输出轴下端均通过螺栓连接有夹板;
安装架下端的安装槽内通过螺栓固定有相机三轴气缸,相机三轴气缸的输出轴下端通过螺栓连接有3D相机,3D相机在吸盘中央开设的矩形通孔处穿出。
2.如权利要求1所述的升降夹紧型真空吸盘夹具,其特征在于,安装架上端安装槽内通过螺栓固定有气控装置。
3.如权利要求1所述的升降夹紧型真空吸盘夹具,其特征在于,两侧夹板上端均通过螺栓固定有固定槽,弹簧杆两端套设在固定槽内,弹簧杆设置有支撑杆,支撑杆两端外侧套设有弹簧,弹簧外端设置有套设在支撑杆外侧的固定套筒,固定套筒卡设固定在固定槽内。
4.如权利要求1所述的升降夹紧型真空吸盘夹具,其特征在于,夹板中间开设有多个竖直开槽。
5.一种如权利要求1所述升降夹紧型真空吸盘夹具的使用方法,其特征在于,所述升降夹紧型真空吸盘夹具的使用方法包括:
(1)3D相机拍照:三轴气缸将压缩空气的压力转化为机械能,驱动整个相机随其做上下往复运动;
(2)夹具运动到货品上方后,由外部控制系统发送拍照信号给夹具上的真空系统关联元件,真空系统关联元件收到拍照信号后打开连接在3D相机上的相机三轴气缸的气路,3D 相机被气压顶出吸盘,气控装置达到一定压强后向外部控制系统输出信号;外部控制系统收到真空系统关联元件的反馈的信号后,控制3D相机进行拍照;拍照完成后再由外部控制系统向气控装置发出相机收回信号,夹具的真空系统关联元件收到该信号后关闭气路,3D 相机自动收回位置;
(3)气控装置通过两位四通电换向阀实现吹气和吸气的作用;真空发生器利用正压气源产生负压;
(4)真空吸盘抓取货品:利用真空发生器将正压转化成低于大气压的负压,形成压强差,产生吸力;
(5)在夹具贴紧被抓货品表面后,外部控制系统向夹具的真空系统关联元件发送吸取信号,真空系统关联元件收到该信号后打开与吸盘通过气路连接的真空发生器,将正压转化为负压产生吸力,从而将货品吸紧。
真空系统关联元件达到一定压强后,向外部控制系统输出信号,至此真空吸盘抓取货品完成。
当真空系统关联元件收到停止吸取信号后,吸盘气路被关闭,货品将不再被吸取;
(6)夹具夹板装置伸长:三轴气缸将压缩空气的压力转化为机械能,驱动机构直线往复运动,使得夹板装置伸长以及回复到原位;
(7)外部控制系统向夹具真空系统关联元件发送夹板装置伸长信号后,真空系统关联元件收到该信号后打开两侧三轴气缸的气路,夹板从未伸缩状态变为伸展状态,真空系统
2。