PowerMILL自动出程式单
3-PowerMill程序单的模板定制

PowerMill 程序单的模板定制
PowerMill 提供两种方法输出 NC 加工程序单:右键菜单 “PowerMILLUtilities”和 NC 程序“设置清单”,这两种方法输出的表单均为 Html 网页格式,可定制性和交互性 较强。PowerMill 提供了大量的参数与变量以输出刀具路径(toolpath)和 NC 程序信息, 可满足客户生产管理的需要。
第 5页,共 6 页
2、在模板中加入 java.script 脚本程序,并设置其自动运行。
此脚本程序的作用原理是遍历 刀具路径表格每一行,通过条件判断删除不需要
的部分。
其效果如下:
这一节简单介绍了 PowerMILL 程序单的输出原理和模板定制,主要是一些实现方法 和思路。
第 6页,共 6 页
一、程序单输出原理的三点说明
1、PowerMill 提供项目标题、NC 程序标题、刀具路径、项目综述、NC 程序综述等 几种表单输出类型。 不同的输出类型侧重于不同的信息输出,但是它们的区别不是绝对的,我们可以在不 同的类型中输出相同内容的程序单(假如模板相同的话)。
2、PowerMill 采用网页模板固定输出样式和内容。 其中网页样式(如字体大小、图片大小、表格边框等)可能不仅取决于模板文件本 身,还受到样式表文件(style.css)的制约。 3、PowerMill 使用参数代换的方法输出信息内容。 PowerMill 的参数代换是一种宏代换,各参数的意义参见相关说明。
第 2页,共 6 页
2024版PowerMill软件教程

利用机器人加工技术,可以实现复杂曲面和零件的自动化加工, 提高生产效率和灵活性。
05
PowerMill软件与其他系 统集成
CAD/CAM系统集成
导入CAD模型
PowerMill可以直接导入各种CAD软件创建的 模型,如SolidWorks、CATIA、Pro/E等,实 现无缝集成。
PowerMill可以与自动化生产线规划软件集成,实现生产线的整体 优化和布局。
物料管理
通过与ERP、MES等系统的集成,PowerMill可以实现物料信息的 自动获取和更新,提高生产效率。
自动化控制
PowerMill可以与PLC、机器人等自动化设备集成,实现生产线的自 动化控制和运行。
06
实际案例分析与操作演示
工具栏
提供常用命令的快捷按钮,方便用户快速执行操 作。
快捷键
通过键盘快捷键可以快速执行常用命令,提高工 作效率。
自定义快捷键
用户可以根据自己的习惯自定义快捷键。
文件管理与项目设置
01
文件打开与保存
支持多种文件格式,方便用户导入 和导出数据。
图层管理
通过图层管理可以方便地组织和管 理模型数据。
03
02
特殊加工策略
针对特定需求和材料,如五轴联动加 工、高速铣削等。
刀具路径生成与优化
刀具选择
切削参数设置
根据加工需求和材料特性选择合适的刀具类 型和规格。
设置合理的切削速度、进给量、切削深度等 参数,以确保加工效率和刀具寿命。
路径优化
碰撞检测与避免
通过调整刀具路径的生成方式和参数,减少 空行程、提高切削效率,并降低对机床的磨 损。
02
PowerMill软件基本操作
PowerMILL如何输出NC等任意格式程序(2024)

提供一些在使用 PowerMILL输出NC程序时 需要注意的事项和常见问 题的解答,以帮助用户更 好地掌握这一功能。
2024/1/26
5
02
PowerMILL软件概述
2024/1/26
6
软件功能与特点
强大的加工策略
全面的刀具路径优化
PowerMILL提供多种高效、精确的加工策 略,包括粗加工、精加工、清角加工等, 满足复杂零件的加工需求。
FANUC格式
FANUC数控系统广泛应用于各种机床,其程序格式以G代 码和M代码为主,支持直线插补、圆弧插补等基本功能。
Siemens格式
Siemens数控系统在欧洲市场占据主导地位,其程序格式 以ISO代码为主,支持高级编程功能如参数编程、子程序调 用等。
Heidenhain格式
Heidenhain数控系统以高精度、高速度著称,其程序格式 采用专有的G代码和M代码,支持多种加工方式和复杂轮廓 编程。
03
输出NC等任意格式程序的需求
在实际生产过程中,不同的数控机床和控制系统可能需要 不同的NC程序格式。为了满足这些需求,PowerMILL提 供了输出多种NC程序格式的功能。
4
汇报范围
01
02
03
04
05
PowerMILL软件 NC程序格式的介 PowerMILL输出 输出其他任意格 注意事项和常见
软件具备刀具路径自动优化功能,可根据 加工需求自动调整刀具路径,提高加工效 率和质量。
灵活的机床控制和仿真
丰富的数据接口
PowerMILL支持多种数控系统和机床类型 ,可实现精确的机床控制和仿真,确保加 工过程的准确性和安全性。
软件支持多种CAD数据格式导入和NC程序 输出,方便与其他CAD/CAM系统进行数据 交换。
编程必看PowerMILL必懂的应用技巧

确保安装的PowerMILL版本与操作系 统兼容,并及时更新软件至最新版本
。
更新显卡驱动
显卡故障可能导致软件崩溃或卡顿, 定期更新显卡驱动以保持系统稳定性 。
重置软件配置
在软件设置中重置配置,以恢复默认 设置并解决可能的配置冲突问题。
刀具路径异常问题定位
检查刀具设置
核对刀具参数设置,确保刀具类型、直径、长度等参数正确无误。
介绍能源领域(如风力发电、核能等)典型 零件的加工技术和解决方案。
医疗器械领域案例分析
介绍医疗器械领域精密零件的加工技术和自 动化编程应用案例。
05
常见问题排查与解决方案
软件崩溃或卡顿问题处理
优化计算机性能
确保计算机硬件配置满足PowerMILL 的系统要求,并关闭不必要的应用程序
以释放系统资源。
精通批处理编程技术
利用批处理技术,实现多个零件的自动加工,提高生产效率。
定制化开发需求解决方案
根据企业实际需求进行定制化开发
01
针对企业的特殊加工需求,进行定制化开发,满足企
业的个性化需求。
掌握PowerMILL二次开发技术
02 利用PowerMILL提供的API接口进行二次开发,实现
更高级的功能拓展。
高级的仿真功能
提供全面的机床仿真功能,可模拟实际加 工过程,检查碰撞、过切等问题,确保加 工安全。
系统需求及硬件配置建议
CPU
建议使用多核处理器,主频 2.5GHz以上。
显卡
建议使用专业图形显卡,支持 OpenGL 3.3及以上版本。
操作系统
支持Windows和Linux操作系 统,建议使用64径的自动优化,减少空切 、提高切削效率,同时降低刀具磨损。
官正版全套powermill教程

模具型芯铣削加工实例
导入模具型芯模型
将模具型芯的三维模型导入到PowerMILL中 ,进行后续编程和加工。
设定加工参数
选择合适的刀具、切削参数、加工策略等,确 保加工质量和效率。
生成刀具路径
根据设定的加工参数,生成合理的刀具路径,并 进行模拟验证。
输出NC程序
将生成的刀具路径转换为NC程序,传输到数控机床 进行实际加工。
常见问题解决方法
提供针对常见问题的解决方法,以帮助用户 快速解决问题并提高加工效率。
THANKS
感谢观看
REPORTING
查是否存在过切、欠切或碰撞等问题。
材料去除模拟
通过材料去除模拟功能,用户可以直观地 看到加工过程中材料的去除情况,以便及
时调整加工参数和策略。
碰撞检测
在仿真过程中,软件会自动检测刀具、夹 具和机床之间的碰撞,确保加工过程的安 全性。
机床运动模拟
PowerMill支持机床运动模拟,可以模拟 机床的实际运动情况,帮助用户更好地理 解和优化加工过程。
特殊材料介绍
阐述特殊材料的概念、分类和特点,以及加工过程中可能遇到的问 题和挑战。
特殊材料加工技术
讲解针对特殊材料的加工技术和方法,包括难加工材料的切削技术 、脆性材料的加工技术、复合材料的加工技术等。
特殊材料加工案例
通过案例分析,展示特殊材料加工技术的实际应用和效果,包括加 工过程中的注意事项和经验分享。
模具型腔铣削加工实例
导入模具型腔模型
将模具型腔的三维模型导入到PowerMILL中 ,进行后续编程和加工。
生成刀具路径
根据设定的加工参数,生成合理的刀具路径 ,并进行模拟验证。
设定加工参数
选择合适的刀具、切削参数、加工策略等, 确保加工质量和效率。
powermill软件操作使用教程-15_EDIT
15. 编辑刀具路径刀具路径退出PowerMILL时,PowerMILL中的任何信息均将丢失,除非在此之前已将这些信息保存到项目。
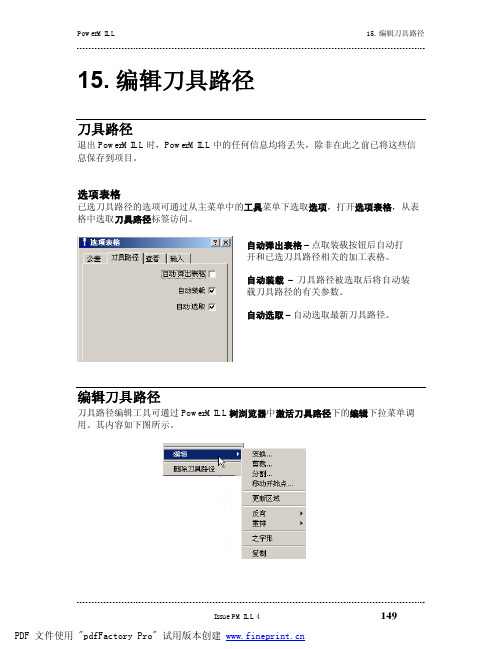
选项表格已选刀具路径的选项可通过从主菜单中的工具菜单下选取选项,打开选项表格,从表格中选取刀具路径标签访问。
编辑刀具路径刀具路径编辑工具可通过PowerMILL树浏览器中激活刀具路径下的编辑下拉菜单调用。
其内容如下图所示。
编辑 >变换选取变换选项可镜像,移动和旋转刀具路径。
变换 – 镜向范例使用镜像选项可产生所选刀具路径的镜像图形,这种方法尤其适合于产生具有对称形状模型的刀具路径。
当然也同时需要镜向模型并对产生的刀具路径进行切入切出和连接处理,这样才能真正完成刀具路径的产生。
• 全部删除并重设表格。
• 通过PowerMILL_data 打开项目 wheel_cav 。
• 从范例目录下装载模型 wheel_segment.tri 。
• 激活刀具路径 1。
此刀具路径是使用图形文件wheelsegment.pic 定义的毛坯产生。
将对此刀具路径进行变换处理,以产生轮毂其它部分的刀具路径。
通过镜向处理已有刀具路径可产生加工上半部轮毂的刀具路径。
• 选取沿Z 轴向下查看。
• 通过刀具路径选取编辑 >变换。
•在变换表格中选取镜向,设置X,Y和角度为0。
于是一个平面显示在屏幕上,它是刀具路径的镜向平面,刀具路径将相对此平面进行镜向处理。
表格中的X值和Y值用来定义平面的水平位置,角度值用来定义平面的角度。
该角度自X轴的正向顺时针测量。
•应用此刀具路径表格。
新产生的刀具路径wheelcav_cut_1_,1看起来没什么问题,但系统还未对此刀具路径进行过切检查。
新产生的刀具路径目录上出现一红色的感叹号,它提醒您还未进行过切检查。
•右击此激活的刀具路径。
选取检查选项。
屏幕上将弹出一信息视窗,告诉您刀具路径中是否存在过切。
原始刀具路径中的切削方向设置为顺铣,放大查看新产生的刀具路径可看到,此方向已被反转。
powermill使用命令一览
powermill使用命令一览下表列出了Powermil系统的一些常用的同时也是较实用的一些命令,应用这些命令的路径是:在Powermill的下拉菜单执行“工具”—“显示命令”,打开Powermill命令操作窗口,即可输入命令。
序号命令名称命令功能1 Project claim 去除加工项目文件的只读属性2 Edit toolpath;axial_offset 此命令通过一条激活的五轴刀具路径偏置一个距离而产生一条新的五轴刀具路径,新的刀具路径的刀位点眼刀轴矢量偏置3 Edit toolpath;show_tool_axis 30 0 此命令显示当前五轴刀具路径的刀轴矢量,命令后面的数字30为矢量长度,改制可以户自行定义4 EDIT SURFPROJ AUTORANGE OFF 在曲面投影精加工策约中,关闭自动投影距离EDIT SURFPROJ RANGEMIN -6 设置曲面投影精加工的投影最小距离-6(此值可改变)EDIT SURFPROJ RANGEMAX 6 设置曲面投影精加工的投影最小距离6(此值可改变)5 EDIT SURFPROJ AUTORANGE ON 在曲面投影精加工策约中,打开自动投影距离(机不限制投影距离)6 lang English 切换到英文界面Lang chinese 切换到中文界面7 Edit UNITS MM 转换到米制(公制)Edit UNITS INCHES 转换到英制8 EDIT PREFERENCE AUTOSAVE YES 批处理完刀具路径后自动保存EDIT PREFERENCE AUTOSAVE NO 批处理完刀具路径后不自动保存9 EDIT PREFERENCE AUTOMINFINFORM YES pOWERMILL精加工计算路径时视窗缩小化EDIT PREFERENCE AUTOMINFINFORM NO pOWERMILL精加工计算路径时视窗不缩小化10 COMMIT PATTERN ; \r PROCESS 参考线直接转换为刀具路径11 COMMIT BOUNDARY ; \R PROCESS TPLEADS 边界直接转成刀具路径命令12 BATCH PROCESS ALLPROJECT SAVE刀具路径批处理并保存项目一:宏的使用方法:M "路径编辑"I "圆形圆弧" 1 "macro 'C:\dcam\pmill2\宏程序\圆形圆弧.mac'"二:模板的使用方法:M "刀库调用"I "铜公刀库" 1 "IMPORT TEMPLATE PROJECT FILEOPEN'C:\dcam\pmill2\刀具库\tool-H.ptf'"I "钢料刀库" 1 "IMPORT TEMPLATE PROJECT FILEOPEN'C:\dcam\pmill2\刀具库\tool-L.ptf'"三:应用程序的使用方法:I "机明自动编程" 1 "ole fileaction 'open' 'C:\Program Files\机明自动编程免费版\JIMMILL.exe'"。
PowerMILL自动出程序单变量表
PowerMILL自动出程序单变量表程序单模版名称:名称不能变,程序单里的"sheet1"名也不能变,否则将无法出单程序单模版放在安装目录下的config文件夹里{Date}{Modelpiciso}{Modelpicfront}{Modelpicleft}{Modelpictop}{Modelpicback}{Modelpicright}{Modelsize}{Ncname}{Operation}{Milltype}{Toolname}{Toolnum}{Toollength}{Fz}{Cuttime*1.35}{Totalcuttime*1.35}{Shankdia}{Toolcutlen}{Tol}{PathThickness}{ProjectPath}{Partname}{Customer}{Moldnum}{MT}{Mrl}{Spindlespeed}{Cuttingfeed}名称:CNCSTEEL.xls代表钢料模版,CNCELEC.xls代表电极模版名称不能变,程序单里的"sheet1"名也不能变,否则将无法出单程序单模版放在安装目录下的config文件夹里当前时间三维图前视图左视图俯视图后视图右视图模型尺寸程序名称刀路名称加工类型(开粗、光刀)按刀路名称首字母区分,R代表开粗,F 代表光刀。
刀名刀号刀长加工深度加工时间 1.35表示倍数加工总时间 1.35表示倍数刀柄直径避空公差余量项目路径零件名称客户名称模具编号机床材料转速进给备注:变量必须放在100行70列之内。
powermill 14.NC输出(绝对实用)

第十四章產生NC檔說明PowerMILL 運算刀具路徑後產生NC檔給 CNC 工具機加工。
刀具路徑將顯示在刀具路徑管理區,如下圖。
把刀具路徑輸出成 NC 檔, 操作如下:設定輸出NC目錄下拉式功能表 ->工具 ->自定路徑 ->選取NC程式輸出 ->再點選NC輸出目錄出現如右圖視窗選單。
NC程式副檔名的設定下拉式功能表 -> 工具(T) ->選項(P) ->NC程式。
選取參數檔下拉鍵,右空格填入副檔名。
點選接受。
設定控制器名稱-XXX.OPT在物件管理區點選NC程式後,按滑鼠右鍵點選設定參數。
出現如下NC程式輸出設定選單。
再點選選擇檔案目錄,出現如右圖。
選取控制器名稱,XXX.OPT。
設定選單所需參數後,點選接受。
產生NC程式名稱單一刀具路徑輸出,操作如下。
點選單一的路徑上按滑鼠右鍵。
在下拉式中選取產生獨立的NC程式。
此時在NC程式處會出現與刀具路徑的 NC程式名稱。
多個刀具路徑輸出,操作如下:在物件管理列的刀具路徑上按滑鼠右鍵。
在下拉式中選取產生獨立的NC程式。
此時在NC程式處會出現全部的刀具路徑NC程式名稱。
多個刀具路徑合併輸出,操作如下:在物件管理列的NC程式上按滑鼠右鍵。
在下拉式中選取產生NC程式。
出現如下選單,輸入名稱XXX。
點選接受。
將刀具路徑產生NC程式在物件管理列的刀具路徑上按滑鼠右鍵在下拉式中選取新增到作動NC程式此時在NC程式處的ALL程式名稱下,合併全部的刀具路徑名稱 PS:路徑的加工順序是由上而下排列也可由資料夾來產生NC程式並提供三種設定:產生串刀程式產生獨立NC程式新增到作動NC程式輸出NC程式單一路徑輸出寫入:在ALL程式上按滑鼠右鍵在下拉式中選取寫入即輸出此NC程式輸出後置於設定的NC目錄中多個路徑輸出寫入在NC程式上按滑鼠右鍵在下拉式中選取全部寫入此NC程式輸出後置於設定的NC目錄中NC程式對話選單編輯在該對話選單中,我們即可通過"編輯"選項來修改NC程式的設定,同時也可在該對話選單中選擇NC程式所要輸出的類型。
powermill用宏来做自动编程

自动宏加工,首先我们得认清几个问题。
当然,我只针对本公司的一些情况做分析,具体的宏,只有结合自己公司和自己习惯做出来才是最好的。
1、按铜公分类,比如:只有一个岛屿,或多个岛屿的要分开,因为我们用等高的时候,会出现2个问题,即模型加工与非模型加工,这个不分清会造成挤刀的情况出现。
2、做铜公时,按我们定义的宏来确定基准台的高度。
这点很重要,只要按宏来做好,以后一切都方便了3、。
没想到,请各网友提些意见与建议。
现在来说我的思路,以前我也跟了几个贴子,现在我在此再次重申下。
1:铜公用顶面为零的方法加工2:开粗:先开基准台以上的,定义毛坯方法,用全计算减去基准台的高度(我的宏定义基准台的高度的是10MM,各公司或各人喜好不同,请按照宏里更改。
)算出上面的刀路。
很多朋友问怎么算下面的刀路,定义不到毛坯,我以前也郁闷了几天,后来和A-Tian(kugo)交流了下,解决了这个问题。
呵,打了下广告。
现进入正题,加工下面基准台时,用全定义毛坯。
扩展1MM,刀路用上一把刀的残留,但检测材料厚于这个选项要设多点。
也不要超过扩展的1MM,我这里设定的3: 光侧,用轮廓区域清除表格,一刀到底,加工2-3圈。
若是高速机或精雕用残留方法加工(同开基准台的粗)以上适合大部份类型的铜公,下面说光面的思路。
4:光铜公面,这里牵涉到岛屿的问题,一个岛屿并且比较低的话,就直接用平行光面(自带算边界),比较高的岛屿,用等高光刀加上浅滩的方法来光。
多个岛屿的话运也用等高精加工,但是不要勾螺旋与型腔加工,让他一层一层的光下去,即可。
5:。
若要清角,请自行手工增加刀路,不要因为这点就咬住说这只能算半自动加工,其实大家的概念有误,什么叫全自动调加工图、全方位计算好了,并能按自己的机床参数直接后处理好了这才叫全自动编铜公其实不然,不管怎么说,按宏或VB做出来的,都需要自己去检查与处理一下的,所以,没有全自动编铜公一说。
实际运用第一。
先将小弟的后处理文件复制到C:\dcam\config\ductpost\下。
PM输出程式单
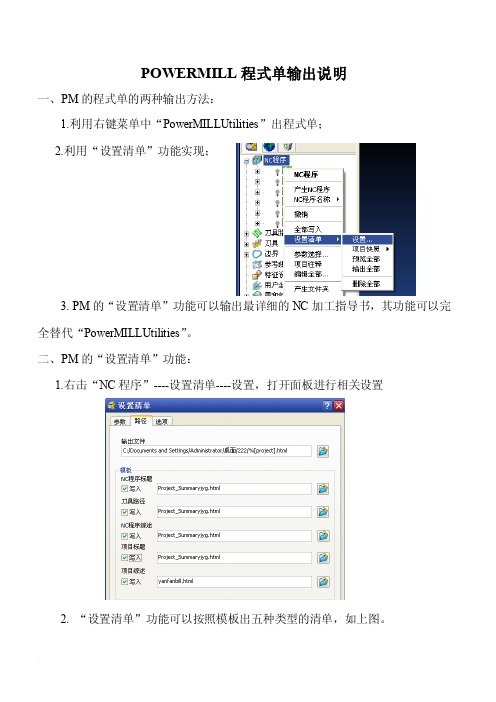
POWERMILL程式单输出说明一、PM的程式单的两种输出方法:1.利用右键菜单中“PowerMILLUtilities”出程式单;2.利用“设置清单”功能实现;3. PM的“设置清单”功能可以输出最详细的NC加工指导书,其功能可以完全替代“PowerMILLUtilities”。
二、PM的“设置清单”功能:1.右击“NC程序”----设置清单----设置,打开面板进行相关设置2. “设置清单”功能可以按照模板出五种类型的清单,如上图。
其中:“项目标题”可输出整个加工项目的总体信息“NC程序标题”可输出每一条“NC程序”的总体信息“刀具路径”可输出每一条加工刀路(即每一个加工策略)的信息“项目综述”对整个项目的每条加工刀路作信息的输出“NC程序综述”对每一NC程序中包含的每条加工刀路作信息的输出可以认为PM能输出最详细的加工信息,但是由于它在统计时基于每一条刀具路径,而不是每一条输出G代码的“NC程序”,因此在输出CNC车间使用的程式单时也有“太详细”的弊端。
三、CNC车间程式单输出方法:1. 将文件“yangfanbill.html”复制到模板路径下:……\Delcam\PowerMILL8009\file\setup-sheets\2.打开设置面板,只勾选最后一项,指定模板“yangfanbill.html”,设置输出路径(可默认)。
4.设置快照图像5.输出:结果如下:这张程序单没有经过人工修改,前面的顺序检查增强了它的易读性,那是对应刀路的注。
四、关于程序单的定制和编辑:最好使用网页软件如Frontpage或Dreamwaver编辑,有及时预览功能,其它软件可能产生乱码。
PowerMILL模具程编技巧
PowerMILL模具程编技巧1. 数据转换数据转换是程序编制的第一步工作。
现代的产业结构调整以及产品开发周期的缩短,极大地增加了CAD与CAM的异地化生产的机率,这就使得CAD模型的转换成为现代生产的关键环节。
PowerMILL转换数据稳定可靠...1. 数据转换数据转换是程序编制的第一步工作。
现代的产业结构调整以及产品开发周期的缩短,极大地增加了CAD与CAM的异地化生产的机率,这就使得CAD模型的转换成为现代生产的关键环节。
PowerMILL转换数据稳定可靠,能够读入CATIA、UG、Pro/ENGINEER等14种格式的数据。
与其他CAD/CAM软件联合使用,充分地利用了各软件的优势,大大提高了编程的效率和质量。
2. 参数设定模型读取结束,我们首先要进行加工参数的设定。
加工参数主要包括毛坯、进给率、快进高度、开始点、切入切出连接方式和加工刀具等。
(1)毛坯大小的设定在PowerMILL中,毛坯扩展值的设定很重要。
如果该值设得过大将增大程序的计算量,大大增加编程的时间,如果设得过小,程序将以毛坯的大小为极限进行计算,这样很有可能有的型面加工不到位,所以,毛坯扩展的设定一般要稍大于加工刀具的半径,同时还要考虑它的加工余量。
笔者的经验是,扩展值应等于加工刀具的半径加上加工余量,再加上2~5m m。
例如,D50R25的刀具,型面余量1,那么毛坯扩展可设定为30。
(2)进给率的设定进给率的设定较为方便,可根据加工车间的习惯而定。
(3)快进高度的设定快进高度包括两项:安全高度和开始高度。
安全高度一般要在PowerMILL计算出来的值的基础上,再加上100mm左右。
开始高度的值最好不要与安全高度一样,一般将它设为比安全高度小10mm。
这样的设定是为了在NC程序输出中增加一个Z值,有利于数控加工的安全性。
图1和图2所示的例子,是两个除了快进高度外,参数完全相同的刀具路径所输出的NC 程序。
图1 安全高度与开始高度不同1%N2G40G17G90N3S1500M03N4M08N5G01X-296.555Y-85.026F500N6Z140.000N7Z-70.000N8X-296.547Z-69.956『::好就好::中国权威模具网』图2 安全高度与开始高度相同2%N2G40G17G90N3S1500M03N4M08N5G01X-296.555Y-85.026F500N6Z-70.000N7X-296.547Z-69.956(4)开始点的设定开始点的值一般与安全高度的值相同。
PowerMILL教程--16设置清单

14. 设置清单简介全部的PowerMILL项目数据,如刀具定义、整体刀具路径尺寸和刀具路径图像等都可被自动记录和打印。
这些对运行程序的CNC机床操作者来说很有帮助。
设置清单可通过PowerMILL浏览器中的NC程序域产生。
•删除全部并重设表格。
•从PowerMILL_data/Projects 打开项目Tapefile_1。
产生设置清单前需产生一NC程序。
•右击浏览器中的NC 程序 参数选择•点击文件夹图标,打开选取机床选项文件名表格。
选取,然后应用并接受表格。
右击浏览器中的NC 程序。
选取产生NC程序。
•输入名称Job_650_top,然后接受表格。
•右击刀具路径。
•选取增加到NC程序。
于是全部刀具路径即增加到NC程序中。
右击此NC程序,然后选取设置选项,打开下图所示表格。
•表格中的某些域,如项目等已自动填写。
填写表格中的其它内容。
•确认没激活任何刀具路径且模型呈阴影显示状态。
右击此NC程序,然后如图所示,选取当前查看选项。
于是系统即捕捉拍照一模型图像,这个图像将自动用在设置清单的首页。
右击此NC程序,此次选取全部刀具路径。
于是系统即捕捉拍照已选NC程序中的全部刀具路径图像。
设置清单中,每条刀具路径具有各自单独的页面。
再次右击此NC程序,此次选取预览选项。
屏幕左边是设置清单索引,屏幕的右边是设置清单首页。
•点击某些刀具路径设置清单。
•点击综述页面1。
•右击此NC程序。
•选取设置清单 – 输出。
输出选项将全部设置清单以HTML文件格式保存在当前项目文件夹中。
可在PowerMILL中直接打印设置清单,也可在输出后,通过打印HTML文档来打印。
自定义设置清单通过编辑HTML模板可用户化设置清单输出,使它更适合于各个用户的特殊要求。
HTML模板文件最好是使用某个HTML 编辑软件来编辑。
在英特网上可找到一些免费的HTML编辑软件,也可使用Microsoft Word来编辑,但是使用Microsoft Word 的缺点是通常不可预知编辑后的结果。
powermill程序单变量参数

{Tolerance}{Block.Type}{Block.CoordinateSystem}{Filter.Type}{Filter.Factor}{BoundaryLimit.Keep} {BoundaryLimit.Tool}{ToolAxis.Type}{Block.Limits.XMin}{Block.Limits.XMax}{Block.Limits.YMin}{Block.Limits.YMax}{Block.Limits.ZMin}{Block.Limits.ZMax}{tool.NumberOfFlutes}{tool.Number.Value}{tool.Length}{tool.Identifier}{tool.Diameter}{Verification.Clearance.Head} {Verification.CheckAgainst} {Units}{ToolpathType}{ToolAxis.Type} {ThicknessSetValues.Thickness} {Strategy}{Stepdown}{StartPoint.Type}{StartPoint.Distance} {SpindleSpeed.Value}{Rapid.Type}{Rapid.SafeArea}{Rapid.Plane.PlungeDistance} {Rapid.Plane.Normal}{Ordering}{Filter.Type}{Filter.Factor}{FeedRate.Rapid}{FeedRate.Plunging.Value} {FeedRate.FeedPerTooth.Value} {FeedRate.CuttingSpeed.Value} {FeedRate.Cutting.Value} {CutDirection}{AreaClearance.Profile.CutDirection} {Connections.PlungeDistance} {Connections.MoveDirection} {Connections.MaxMoveExtension}{Connections.IncrementalMode} {BoundaryLimit.Tool}{BoundaryLimit.Keep}{Block.Type}{Block.Limits.XMax}{Block.Limits.XMin}{Block.Limits.YMax}{Block.Limits.YMin}{Block.Limits.ZMax}{Block.Limits.ZMin}{AreaClearance.Offset.Type} {AreaClearance.Offset.Preference} {AreaClearance.LeadIn.Type}下面有关图像的参数命令{CompanyLogo}{DelcamLogo}{PMillLogo}{CompanyLogoSRC}{DelcamLogoSRC}{PMillLogoSRC}{setupsheets.project.image_tag} {setupsheets.ncprogram.image_tag} {setupsheets.toolpath.image_tag} {setupsheets.project.image_file_name} {setupsheets.ncprogram.image_file_name} {setupsheets.toolpath.image_file_name} {setupsheets.tool.vml}{ToolType}{ToolTypeSRC}下面有关项目的参数命令{project.date}{project.day}{project.month}{project.notes}{project.path}{project.programmer}{project.time}{project.year}{version}{codebase}{project.customer}{project.partname}{project.orderno}{setupsheets.model.file_name} {setupsheets.model.file_path}{units}{PD_TotalTime}下面有关NC程序的参数命令{project.nc_path}{ncprogram.programmer}{ncprogram.notes}{ncprogram}{ncprogram.partname}{ncprogram.shortname}{ncprogram.specialname}{ncprogram.counter}{ncprogram.date}{ncprogram.option_name}{PD_CutTime}{PD_OutputDirectory}{PD_TapFile}{PD_Units}{ncprogram.workplane}{ncprogram.model.limits.x.max}{ncprogram.model.limits.x.min}{ncprogram.model.limits.y.max}{ncprogram.model.limits.y.min}{ncprogram.model.limits.z.max}{ncprogram.model.limits.z.min}{ncprogram.OptionFile}{ncprogram.statistics.tool_lifts} {ncprogram.statistics.totaltime} {ncprogram.tool_datum}{ncprogram.tool_lifts}下面有关刀具路径策略的参数命令{AllowToolOutsideBlock} {AlternateCutDirection}{AngularDirection}{AngularLimits.End}{AngularLimits.Start}{AngularLimits2.End}{AngularLimits2.Start}{AngularSmoothing}{AngularStepover}{AreaClearance.CalculationType} {AreaClearance.FeatureData}{AreaClearance.LeadIn.ApproachOutside} {AreaClearance.LeadIn.Drill.Pattern} {AreaClearance.LeadIn.Drill.TemplateName} {AreaClearance.LeadIn.Ramp.CircleDiameter} {AreaClearance.LeadIn.Ramp.Follow} {AreaClearance.LeadIn.Ramp.LimitLength.Active} {AreaClearance.LeadIn.Ramp.LimitLength.Value}{AreaClearance.LeadIn.Ramp.MaxZigAngle} {AreaClearance.LeadIn.Ramp.ZagAngle.Active} {AreaClearance.LeadIn.Ramp.ZagAngle.Value} {AreaClearance.LeadIn.Type}{AreaClearance.Offset.Links}{AreaClearance.Offset.Order}{AreaClearance.Offset.Preference} {AreaClearance.Offset.RemoveCusps} {AreaClearance.Offset.SmallestFirst} {AreaClearance.Offset.SmoothingAllowance.Active} {AreaClearance.Offset.SmoothingAllowance.Value} {AreaClearance.Offset.Trochoids.Allowance}{AreaClearance.Offset.Trochoids.Constraint.Active} {AreaClearance.Offset.Trochoids.Constraint.MaxDiame ter}{AreaClearance.Offset.Trochoids.Constraint.MaxStepa long}{AreaClearance.Offset.Trochoids.Constraint.MinDiame ter}{AreaClearance.Offset.Trochoids.Distribution} {AreaClearance.Offset.Type}{AreaClearance.Profile.CornerRadius.Active} {AreaClearance.Profile.CornerRadius.Value} {AreaClearance.Profile.CutDirection} {AreaClearance.Profile.Final.Active} {AreaClearance.Profile.Final.Allowance} {AreaClearance.Profile.Final.Location}{AreaClearance.Profile.Outside}{AreaClearance.Profile.Sequence}{AreaClearance.Profile.SlotSide}{AreaClearance.Raster.Angle.Mode} {AreaClearance.Raster.Angle.Value} {AreaClearance.Raster.ConstantStepover}{AreaClearance.Raster.MachineAll} {AreaClearance.Raster.MinimiseFullWidthCuts}{AreaClearance.Raster.PerpendicularPass} {AreaClearance.Raster.Style}{AreaClearance.Rest.Active}{AreaClearance.Rest.ExpandArea}{AreaClearance.Rest.RefMethod}{AreaClearance.Rest.ReferenceType} {AreaClearance.Rest.ThresholdThickness} {AreaClearance.Rest.Toolpath}{ePreviousZHeights} {AreaClearance.SliceData}{AreaClearance.Slicer.CutterCompensation.MinRadius}{AreaClearance.Slicer.CutterCompensation.Type} {AreaClearance.Slicer.FileName}{AreaClearance.Slicer.Filter.Active} {AreaClearance.Slicer.Filter.EnclosedOnly} {AreaClearance.Slicer.Filter.Mode} {AreaClearance.Slicer.Filter.Threshold} {AreaClearance.Slicer.Flat.AllowToolOutside}{AreaClearance.Slicer.Flat.ApproachAllowance}{AreaClearance.Slicer.Flat.HoleFilterThreshold.Acti ve}{AreaClearance.Slicer.Flat.HoleFilterThreshold.Valu e}{AreaClearance.Slicer.Flat.MultipleCuts.Active} {AreaClearance.Slicer.Flat.MultipleCuts.FinalStepdo wn.Active}{AreaClearance.Slicer.Flat.MultipleCuts.FinalStepdo wn.Value}{AreaClearance.Slicer.Flat.MultipleCuts.Number} {AreaClearance.Slicer.Flat.MultipleCuts.Stepdown} {AreaClearance.Slicer.Flat.Tolerance}{AreaClearance.Slicer.Type}{AreaClearance.SlicerReference}{AreaClearance.ZHeights.Automatic}{AreaClearance.ZHeights.ConstantStepdown} {AreaClearance.ZHeights.Flats}{AreaClearance.ZHeights.List}{AreaClearance.ZHeights.List.Type} {AreaClearance.ZHeights.List.Value} {AreaClearance.ZHeights.Stepdown}{AreaClearance.ZHeights.Type}{AreaClearance.ZHeights.Value}{AxialDepthOfCut.Value} {AxialOffset} {AxialSmoothingTolerance} {AxialThickness} {AxisTolerance}{azimuth} {BaseLimitingWorkplane} {BliskAxisElevation.Angle} {BliskAxisElevation.Axis}{BliskMachiningType} {BliskOperation} {BottomWireframe} {chamfer.clearance} {chamfer.width} {ClosedOffsets} {CornerOutput} {CornerRadius.Active}{CornerRadius.Value}{cusp.active}{cusp.height}{Cusp.MaxStepdown}{CutDirection}{Drill.ChamferDiameter} {drill.clearance}{drill.clockwise}{ponentDepth}{drill.depth.value} {Drill.DepthType}{Drill.DraftAngle.Value} {Drill.DwellTime}{Drill.FeedReduction} {Drill.GougeCheck}{Drill.HoleData}{Drill.HoleIndex}{Drill.IncrementalStart} {Drill.InitialZ}{Drill.MinPeck}{drill.overlap}{Drill.PeckDecrement} {Drill.PeckDepth.Value} {drill.pitch}{Drill.RapidRetract} {Drill.ReduceFeedDistance}{drill.retract}{Drill.RetractFactor} {Drill.RetractFeedFactor} {Drill.StartFeedDistance}{Drill.StartFeedReduction}{Drill.SubsidiaryPeck} {Drill.TopType}{drill.type}{eCycles}{erParameter} {EdgeTolerance} {elevation}{EndPoint.Distance}{EndPoint.ManualToolAxis} {EndPoint.Mode}{EndPoint.MoveDirection} {EndPoint.Position} {EndPoint.SeparateFinalRetract}{EndPoint.ToolAxis} {EndPoint.Type}{FanAtEnd}{FanningDistance} {MinimumStepover} {MultiPencilIndependantSegments} {MultipleCuts} {MultipleCutsStepdown.Active} {MultipleCutsStepdown.Value} {NumberOfBlades} {OffsetDirection}{overlap}{ParametricLimits.Active} {ParametricLimits.End} {ParametricLimits.Start} {ParametricLimits2.Active} {ParametricLimits2.End} {ParametricLimits2.Start} {ParametricOffsetEndCurve} {ParametricOffsetStartCurve} {PerpendicularPass}{Plunge.CoreRadius}{Plunge.PullBack} {PortAreaClearanceMode} {PortAreaClearancePartialSlices} {PortAreaClearancePlaneLimits} {PortAreaClearanceRampDiameter} {PortAreaClearanceRampSlope} {PortOverlap.DistanceToLiftStart}{PortOverlap.Length} {PortOverlap.LiftHeight} {PortOverlap.MidPoint} {PortToolClearance} {ProjectionDirection} {ProjectionOrder} {ProjectionPatternDirection} {ProjectionRange.Automatic} {ProjectionRange.Max} {ProjectionRange.Min} {ProjectionStyle} {ProjectionSurfaceUnits} {RadialDepthOfCut.Value} {RadialOffset}{RasterAngle}{RemoveShallowSlices}{ReverseAxis}{RotaryType}{RulingsTolerance}{spiral}{StartCorner}{StartOnPattern}{StartPoint.Distance} {StartPoint.ManualToolAxis} {StartPoint.Mode}{StartPoint.MoveDirection} {StartPoint.Position} {StartPoint.SeparateFirstApproach}{StartPoint.ToolAxis} {StartPoint.Type}{stepdown}{StepdownLimit.Active} {StepdownLimit.Value}{stepover}{StepoverLimit.Active} {StepoverLimit.Value}{strategy}{SurfaceNormalSmoothingTolerance} {SurfaceSide}{SwarfBasePosition}{thickness}{ThicknessSets}{ThresholdAngle}{tolerance}下面有关刀具路径连接的参数命令{Connections.ApproachDistance} {Connections.ArcFittingRadius.Active} {Connections.ArcFittingRadius.Value} {Connections.AxisDiscontinuityThreshold}{Connections.DefaultLink}{Connections.DefaultLink.Type} {Connections.ExtendMove}{Connections.FirstLeadIn.Angle} {Connections.FirstLeadIn.Distance} {Connections.FirstLeadIn.Radius} {Connections.FirstLeadIn.Ramp.CircleDiameter} {Connections.FirstLeadIn.Ramp.ClosedProfiles}{Connections.FirstLeadIn.Ramp.Extend}{Connections.FirstLeadIn.Ramp.Follow} {Connections.FirstLeadIn.Ramp.Height.Type} {Connections.FirstLeadIn.Ramp.Height.Value} {Connections.FirstLeadIn.Ramp.LimitLength.Active} {Connections.FirstLeadIn.Ramp.LimitLength.Value} {Connections.FirstLeadIn.Ramp.MaxZigAngle}{Connections.FirstLeadIn.Ramp.ZagAngle.Active} {Connections.FirstLeadIn.Ramp.ZagAngle.Value} {Connections.FirstLeadIn.Type}{Connections.GougeCheck}{Connections.HolderCheck}{Connections.IncrementalMode}{stLeadOut.Angle}{stLeadOut.Distance} {stLeadOut.Radius}{stLeadOut.Ramp.CircleDiameter} {stLeadOut.Ramp.ClosedProfiles} {stLeadOut.Ramp.Extend}{stLeadOut.Ramp.Follow} {stLeadOut.Ramp.Height.Type} {stLeadOut.Ramp.Height.Value} {stLeadOut.Ramp.LimitLength.Active} {stLeadOut.Ramp.LimitLength.Value} {stLeadOut.Ramp.MaxZigAngle}{stLeadOut.Ramp.ZagAngle.Active} {stLeadOut.Ramp.ZagAngle.Value} {stLeadOut.Type} {Connections.LeadIn}{Connections.LeadIn.Angle}{Connections.LeadIn.Distance}{Connections.LeadIn.Radius}{Connections.LeadIn.Ramp.CircleDiameter} {Connections.LeadIn.Ramp.ClosedProfiles} {Connections.LeadIn.Ramp.Extend}{Connections.LeadIn.Ramp.Follow} {Connections.LeadIn.Ramp.Height.Type} {Connections.LeadIn.Ramp.Height.Value} {Connections.LeadIn.Ramp.LimitLength.Active} {Connections.LeadIn.Ramp.LimitLength.Value} {Connections.LeadIn.Ramp.MaxZigAngle}{Connections.LeadIn.Ramp.ZagAngle.Active} {Connections.LeadIn.Ramp.ZagAngle.Value} {Connections.LeadIn.Type}{Connections.LeadInExtension.Angle} {Connections.LeadInExtension.Distance} {Connections.LeadInExtension.Radius} {Connections.LeadInExtension.Type} {Connections.LeadOut}{Connections.LeadOut.Angle}{Connections.LeadOut.Distance} {Connections.LeadOut.Radius}{Connections.LeadOut.Ramp.CircleDiameter} {Connections.LeadOut.Ramp.ClosedProfiles}{Connections.LeadOut.Ramp.Extend}{Connections.LeadOut.Ramp.Follow} {Connections.LeadOut.Ramp.Height.Type} {Connections.LeadOut.Ramp.Height.Value} {Connections.LeadOut.Ramp.LimitLength.Active} {Connections.LeadOut.Ramp.LimitLength.Value} {Connections.LeadOut.Ramp.MaxZigAngle}{Connections.LeadOut.Ramp.ZagAngle.Active} {Connections.LeadOut.Ramp.ZagAngle.Value} {Connections.LeadOut.Type}{Connections.LeadOutExtension.Angle} {Connections.LeadOutExtension.Distance} {Connections.LeadOutExtension.Radius} {Connections.LeadOutExtension.Type} {Connections.LeadsAtAxisDiscontinuities} {Connections.LeadsOnShortLinks} {Connections.LongLink}{Connections.LongLink.Type}{Connections.MaxMoveExtension} {Connections.MoveDirection}{Connections.MoveStartPoints}{Connections.OverlapDistance}{Connections.PlungeDistance} {Connections.RadialClearance}{Connections.RapidSkim} {connections.reorientate} {connections.resolve} {Connections.RetractDistance} {Connections.SeparateFirstLeadIn}{Connections.SeparateLastLeadOut} {Connections.ShankCheck} {Connections.ShortLink} {Connections.ShortLink.Type} {Connections.SkimDistance}{Connections.ThresholdDistance} {JoinRadius}{JoinTolerance}{rapid.box.corner}{Rapid.Box.ExcludedSurfaces.XMax} {Rapid.Box.ExcludedSurfaces.XMin} {Rapid.Box.ExcludedSurfaces.YMax}{Rapid.Box.ExcludedSurfaces.YMin} {Rapid.Box.ExcludedSurfaces.ZMax} {Rapid.Box.ExcludedSurfaces.ZMin} {Rapid.Box.XLength}{Rapid.Box.YLength}{Rapid.Box.ZLength}{rapid.cylinder.axis}{Rapid.Cylinder.PlungeRadius} {rapid.cylinder.point}{rapid.cylinder.radius}{Rapid.IncrementalSafeZ} {Rapid.IncrementalStartZ}{Rapid.MinimiseOffSurface} {rapid.plane.distance}{rapid.plane.normal}{Rapid.Plane.PlungeDistance}{Rapid.SafeArea}{rapid.sphere.centre}{Rapid.Sphere.PlungeRadius}{rapid.sphere.radius}{rapid.type}{rapid.workplane}下面有关刀具路径主轴转速和进给率的参数命令{AxialDepthOfCut.Value}{cut}{coolant.value}{FeedRate.Cutting.Value}{FeedRate.CuttingSpeed.Value}{FeedRate.Cycle}{FeedRate.DepthOfCut}{FeedRate.FeedPerTooth.Value}{FeedRate.PlungeFactor}{FeedRate.Plunging.Value}{FeedRate.Rapid}{FeedRate.SurfaceSlope}{eOverhang}{eWorkDiameter}{plunge}{rapid}{RadialDepthOfCut.Value}{spindle}{VariableFeedRate}下面有关刀具路径定义,推定和编辑的参数命令{computed}{coolant.value} {counter}{DatumX}{DatumY}{DatumZ}{degouge.active} {Degouge.EmbeddedMode} {degouge.method} {degouge.tolerance}{description}{DiscAxis.Elevation} {DiscAxis.Orientation} {EditHistory}{history.codebase} {history.cost}{history.hash} {History.HashVersion} {history.modified} {IDX}{height_above_model} {incomplete}{LimitMethod}{LinearLimits.End} {LinearLimits.Start} {LinearLimits2.End} {LinearLimits2.Start} {MaxDistanceBetweenPoints.Active}{MaxDistanceBetweenPoints.Value}{mesh.factor}{Mesh.MaxTriangleSize.Active}{Mesh.MaxTriangleSize.Value} {Method.FileName}{Method.SplitTolerance}{method.xml}{movement_type}{notes}{ordering}{operation} {ReferenceToolpath}{revision}{strategy}{sorting}{toolpath}{ToolpathType}{TP_TapFile}{TPXMax}{TPXMin}{TPYMax}{TPYMin}{TPZMax}{TPZMin}{Workplane}{WKPL_Name}{WKPL_X}{WKPL_Y}{WKPL_Z}{workplane.ncangle.x}{workplane.ncangle.y}{workplane.ncangle.z}下面有关刀具路径统计学参数命令{axial_thickness}{cut}{CutTime}{CutDir}{CutLength}feedrate.cutting}{feedrate.plunging}{global_thickness}{LevelMove}{linear_stepover}{plunge}{radial_thickness}{rapid}{SafeZ}{spindle}{SpindleSpeed.Value}{spindle_speed}{StartZ}{step}{stepdown}{thickness}{tolerance}{TotalTime}下面有关刀具和夹持参数命令{clearance.head}{clearance.holder}{clearance.shank}{CutLength}{CollisionAvoidance.Active} {CollisionAvoidance.Clearance.Holder} {CollisionAvoidance.Clearance.Shank} {CollisionAvoidance.Curve} {CollisionAvoidance.Direction} {CollisionAvoidance.Origin} {CollisionAvoidance.Type} {CollisionCheck}{comp_n_len} {comp_n_lower} {comp_n_upper}{tool.coolant} {MCLength} {overhang} {TapAng} {TapLen}{TH_Straight} {tool.description} {tool.diameter} {tool.drillAngle}{ToolID}{Tool.Holder[n].Length} {Tool.Holder[n].LowerDiameter} {Tool.Holder[n].UpperDiameter} {tool.identifier}{tool.length}{}{tool.number}{tool.NumberOfFlutes}{tool.gauge_length}{tool.holder_filename}{tool.holder_name}{tool.RoutingEndMillDiameter} {tool.TaperAngle}{tool.TaperDiameter}{tool.TaperHeight}{tool.tip_radius}{tool.TipRadiusCentre}{tool.ToolFamily}{tool.type}{tool.radius}{Tool.Shank[n].Length}{Tool.Shank[n].LowerDiameter}{Tool.Shank[n].UpperDiameter}{TS_Straight}{ReferenceTool}{Safety.Holder.Cutting.Status}{Safety.Holder.Leads.Status}{Safety.Holder.Links.Status}{Safety.Tool.Cutting.Status}{Safety.Tool.Leads.Status}{Safety.Tool.Links.Status}下面有关模型,毛胚和边界参数命令{boundary}{BoundaryExtra}{BoundaryLimit.Keep}{BoundaryLimit.Tool}{block.boundary}{Block.BoundaryData}{block.centre.x}{block.centre.y}{block.centre.z}{Block.CoordinateSystem}{Block.FileName}{Block.Limits.XLength}{Block.Limits.YLength}{Block.Limits.ZLength}{Block.Limits.XMax}{Block.Limits.XMin}{Block.Limits.YMax}{Block.Limits.YMin}{Block.Limits.ZMax}{Block.Limits.ZMin}{block.radius}{Block.TriangleData}{block.type}{StockModelState.Entity} {StockModelState.StockModel}下面有关特征设置和模板参数命令{FeatureSet}{origin}{pattern}{PatternBasePosition}{PatternOrder} {PatternProjectionDirection} {PatternStyle}{ProfileBasePosition}{ProfileGeometry.CutDepth}{ProfileGeometry.MinCurvatureRadius} {ProjectionPatternDirection}下面有关最后确认参数命令{Verification.AdjustTool} {Verification.CalculateCollisionDepth} {Verification.CheckAgainst} {verification.clearance.head} {verification.clearance.holder} {verification.clearance.shank} {Verification.CollisionChecked} {Verification.GougeChecked} {Verification.MinLength}{Verification.OutputSafeMoves}{Verification.OutputUnsafeMoves}{Verification.OverlapDistance}{verification.reorder}{verification.scope}{Verification.SelectiveCheck}{Verification.SplitMoves}{Verification.SplitToolpath}{Verification.StockModelState.Entity}{Verification.StockModelState.StockModel}{verification.type}下面有关页码参数命令{SU_SheetNo}{SU_MaxSheets}下面有关变量参数命令{tool.diameter/2}{{3.5 + feedrate.cutting}*2}{2*stepover}You cannot use string variables such as {project.partname}, {notes}, {totaltime}, with th {CutTime*模型公差毛坯类型边界的坐标系点分布类型点分布公差边界剪裁保留边界剪裁刀具刀轴类型最小X毛坯界限最大X毛坯界限最小Y毛坯界限最大Y毛坯界限最小Z毛坯界限最大Z毛坯界限刀具刃数刀具编号刀具长度刀具名称刀具直径头部净空数量刀具路径检查对照单位刀具路径类型刀轴类型径向余量策略类型行距开始安全高度掠过距离主轴转速快进类型安全区域开始Z高度安全Z高度加工顺序点分布输出类型点分布公差系数掠过进给率下切进给率每齿进给率表面速度切削进给率切削方向轮廓切削方向下切距离撤回和接近移动沿着类型自动延伸距离相对距离边界剪裁刀具边界剪裁位置毛胚类型毛胚+X距离毛胚-X距离毛胚+Y距离毛胚-Y距离毛胚+Z距离毛胚-Z距离加工类型加工参数选择Z轴下切方式company标识语(CompanyLogo.jpg).Delcam 标识语(DelcamLogo.jpg). PowerMILL标识语(PMillLogo.jpg).源文件company标识语(CompanyLogo.jpg).源文件Delcam标识语(DelcamLogo.jpg).源文件PowerMILL标识语(PMillLogo.jpg).项目水平快照(ProjectSnapshot.png).NC程序快照最好使用在刀具路径的模板上刀具路径快照最好使用在刀具路径的模板上源文件水平快照(ProjectSnapshot.png).源文件NC快照最好使用在刀具路径的模板上源文件刀具路径快照最好使用在刀具路径的模板上刀具图片最好使用在刀具路径的模板刀具图像最好使用在刀具路径的模板上源文件刀具类型图像最好使用在刀具路径的模板上日期创造格式: YYYY-MM-DD.天格式月格式项目水平项目路径编程员项目时间年格式PowerMILL版本号PowerMILL ID号消费者名称零件名称订购数量模型文件名称PowerMILL 项目模型文件路径单位项目总时间NC程序输出目录NC程序员NC编程注意NC程序名称当前零件名称到NC程序简写的NC名称简写的NC名称NC程序计算器NC程序日期NC程序后处理文件名称NC程序加工时间NC程序文件输出目录组合的NC程序文件名称单位NC程序坐标系NC程序+X距离NC程序-X距离NC程序+Y距离NC程序-Y距离NC程序+Z距离NC程序-Z距离后处理文件名称NC程序的刀具数量NC程序的总切削时间刀具位置输出NC程序的刀具数量Allow the tool outside the block.Alternate the cutting direction of multiple cuts. Angular direction to machine in.End angle.Start angle.End angle.Start angle.Angular tolerance to which surface normals of splined curve must match surface normals of surface pattern. Angular step between passes (in degrees).Type of Area Clearance toolpath calculation.Area clearance input feature data.Allow level moves to approach the block from outside.Pattern to use for input drilling positions.Name for output drilling pattern/feature.Diameter of the circle in TDU.Controls the direction of the ramp.Enable limiting.Maximum length of ramp in TDU.The angle of descent formed when the tool ramps into the block.Enable independent zag angle control.Zag angle.Lead-in type.Type of link moves to apply between offsets.Order in which to machine offsets.Offset machining preference. Remove cusps created by the tool tip and requested stepover.Machine smallest islands of material first to avoid tool damage.Use offset smoothing. Maximum deviation from the sharp corner (%).Maximum overload that the tool can withstand before trochoidal movement is required (% stepover). Enable trochoidal moves constraint.Trochoidal move maximum diameter (TDU).Trochoidal move maximum stepalong (TDU).Trochoidal move minimum diameter (TDU).Distribution of trochoidal movements.Type of offsetting to use. Activate profile smoothing. Smoothing corner radius (tool diameter units). Machining direction for profile moves.Perform a final profile pass.Allowance for final profile pass.Specifies when the final profile pass is performed.Machine block outer profiles.Determines where profile moves are performed. Specifies the positioning of the tool with respect toslot features.Method of determining raster angle.Raster angle.Maintain a constant stepover. Uses a constant stepover within each area, so that cutter passes lie on both edges of each area. Machine all raster spans. This allows the tool to overmachine, but keeps the overall tool load more constant, which is betterfor high speed machining. Minimise full width cuts. This removed (as much as possible) all raster moves that could cause the tool to cut on its full width. Repeat with a second raster pattern at right angles to the first.Style of rasters.Activate rest machining. Offset rest area by this amount.Method of treating Z heights from reference toolpath. Type of reference entity to use for rest machining.Only machine rest material thicker than this value. Reference toolpath. This is used to obtain the tolerance and thickness used to generate the rest data.Use Z heights from a previous toolpath.Slice data.Minimum radius.Cutter compensation type. Path of file from which to load slices.Activate area filter.Only filter enclosed areas. Filtering mode.Threshold value forfiltering (tool diameter units).Allow the tool outside the flat area.Approach allowance for flat slices (TDU).Activate ignoring of holes. Threshold diameter for holes to be ignored (TDU). Activate multiple cuts.Use a different final stepdown.Final stepdown value. Number of cuts to make. Stepdown value.Flat detection tolerance (0 indicates fixed tolerance). Slicer type.Area clearance slicer reference.Automatically calculate Z heights.Maintain constant stepdown when manually calculating Z heights.Automatically detect flat areas.List of Z heights.Z Height history type.List of Z heights. Stepdown for automatic Z height calculation.Method for manual Z height calculation.Value used for manual Z height calculation.Recommended value for axial depth of cut.Height of the toolpath above drive-curve.Smoothing distance alongtool axis (TDU).Machining axial thickness value.Tolerance used to calculate tool axis. A small value could mean large axis movement, a large value could mean less axis movement but material unmachined (0 means automatic).Azimuth angle.Workplane to limit swarf upper position.Elevation angle.Reference for tool axis elevation angle.Machine entire model or single blade.Machine blade or sides of pocket.Bottom wireframe reference. Tooltip clearance for chamfer.Chamfer.Creates closed offset paths. Which sections of corner toolpath to output.Fit arcs to internal corners of the toolpath where possible.Arc radius to use whenfitting arcs to corners, as a proportion of the tool diameter.Enable automatic calculation.Maximum cusp height permitted.Maximum stepdown when calculating using cusp height.Machining direction. Drilling.Drilling clearance. Clockwise.Depth to be drilled from component top.Drilling depth.Drilling depth type.Drilling draft angle.Drilling dwell.Drilling feed reduction. Gouge check drilling toolpath.Drilling toolpath's output drilling data.Index of component in compound hole.Drilling start position. Drilling safe position. Drilling minimum peck. Drilling.Drilling peck decrement. Drilling peck depth. Tapping pitch.Drilling.Drilling reduce feed distance.Drilling retract.Drilling.Drilling.Drilling reduce feed distance at hole top.Drilling feed reduction at hole top.Subsidiary peck.Drilling top position. Drilling type.Gouge check drilling toolpath.Drilling user parameter. Trimming tolerance used to reduce the noise ofresulting toolpath near the start and end curves. Elevation angle.Distance above last point at which to position end point.Ensures that a specific orientation is used at the end point.Define how the end point should be updated.Direction in which to define the incremental move.The coordinates of the end point.Enables the length and direction of the final retract move to be set differently from the general link settings.Tool axis vector at the end point.Defines how the end point is set.If set, fanning will happen only in the end region of a plane, otherwise fanningwill happen everywhere. Minimum fanning distance. Minimum allowable stepover. Machine segments independently in multipencil toolpaths.Multiple cuts mode.Enable multiple cuts. Stepdown.Number of blades.The direction of offsetting. Overlap between steep and shallow regions.Use parametric limits.End parameter.Start parameter.Use secondary parametric limits.End parameter.Start parameter.End spine reference.Start spine reference. Machine an additional raster pass perpendicular to the first one.Radius of the non-cutting part of the tool (0 for centre cutting tool).Length of pullback move (0 for none).Direction attempts to machine slices.Machine partially accessible slices.Use planes to define limits of port.Diameter of ramp in TDU. Slope of spiral between slices.Distance before mid point of overlap toolpaths begins to lift from model.Length of overlap.Height of lift of toolpath from model at mid point of overlap.Mid point of overlap of segments from opposite ends of ports.Tool clearance.Direction to project in. Order in which to machine toolpath.Direction of pattern.Use automatic projection range.Maximum value of projection range.Minimum value of projection range.Projection machining type. Describes how stepover is defined.Recommended value for radial depth of cut.Clearance between tool and surface.The angle of the primary raster pass relative to the x-axis.Remove shallow Z slices.Rotates the axis direction by 180 degrees.Rotary machining technique. Angular tolerance to calculate rulings between wireframe references.Create a spiral toolpath. Corner at which to start machining.Start on the pattern, rather than 1/2 an offset away from it.Distance above first point at which to position the start point.Ensures that a specific orientation is used at the start point.Define how the start point should be updated.Direction in which to define the incremental move.The coordinates of the start point.Enables the length and direction of the first approach move to be set differently from the general link settings.Tool axis vector at thestart point.Defines how the start point is set.Vertical step between machined levels.Only machine the specified number of steps down.The number of steps down to machine.Distance between consecutive passes.Only machine the specified number of stepovers.The number of stepovers to machine.The type of strategy to machine with.。
powermill 02.基本设定(绝对实用)
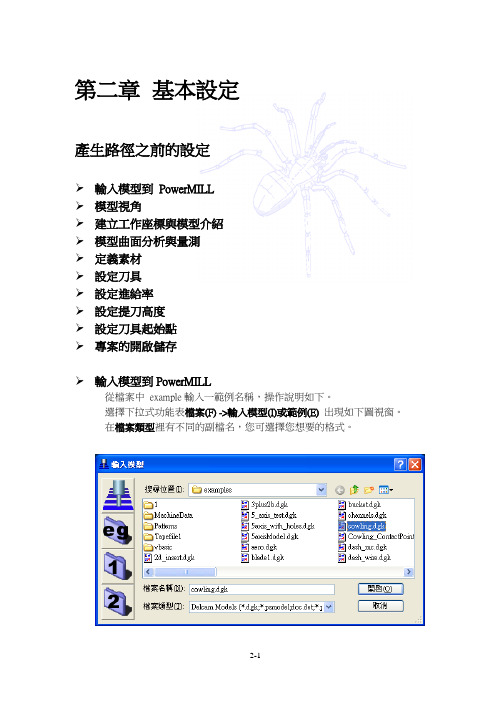
第二章基本設定產生路徑之前的設定輸入模型到PowerMILL模型視角建立工作座標與模型介紹模型曲面分析與量測定義素材設定刀具設定進給率設定提刀高度設定刀具起始點專案的開啟儲存輸入模型到PowerMILL從檔案中example輸入一範例名稱,操作說明如下。
選擇下拉式功能表檔案(F) ->輸入模型(I)或範例(E) 出現如下圖視窗。
在檔案類型裡更不同的副檔名,您可選擇您想要的格式。
選擇cowling.dgk 開啟(O),模型將顯示在PowerMILL 螢幕上。
註:模型可以直接讀取PowerSHAPE的*.psmodel 檔案。
檔案對話框目錄的定義PowerMILL 提供了以下四個可內定目錄的選項供使用者自定,可從這些icon 輸入或者輸出模型,以下將做詳細說明。
選取最後開啟與儲存專案的目錄路徑。
PowerMILL的範例目錄區。
能夠將1的路徑定義到任何硬碟目錄。
能夠將2的路徑定義到任何硬碟目錄。
定義目錄1,2的設定方式從工具(T) ->自定路徑開啟如下圖視窗。
點選檔案對話視窗選鈕1再點選圖形鈕建立目錄路徑。
註:目錄路徑可建立多個,適需要時選取。
模型視角可由檢視工具列點選欲切換的視角選擇,或按鍵盤快速鍵切換,模型會以工作座標為中心更新視窗範圍。
例如CTRL + 1視角Isometric View.。
模型將以ISO1顯示在畫面上。
動態剖面可由視窗任意空白處按右鍵來開啟此功能。
參數說明如下a.位置:正面- 由控制把調整正面剖面位置背面- 由控制把調整背面剖面位置鎖定平面- 鎖定當前兩控制把相對位置b.重置:回復預設設定c.軸向:選定剖面方向,更檢視(當前視角)、X、Y和Z可選擇d.距離:當前剖斷面位置,可手動設定e.顯示邊界:顯示當前模型剖面輪廓邊界f.半透明:以半透明模式顯示整體架構建立工作座標與模型介紹工作座標Workplanes模型需要以工作座標作為NC程式的資料基準,亦可作為旋轉、鏡射等基準位置。
powermill用宏来做自动编程

自动宏加工,首先我们得认清几个问题。
当然,我只针对本公司的一些情况做分析,具体的宏,只有结合自己公司和自己习惯做出来才是最好的。
1、按铜公分类,比如:只有一个岛屿,或多个岛屿的要分开,因为我们用等高的时候,会出现2个问题,即模型加工与非模型加工,这个不分清会造成挤刀的情况出现。
2、做铜公时,按我们定义的宏来确定基准台的高度。
这点很重要,只要按宏来做好,以后一切都方便了3、。
没想到,请各网友提些意见与建议。
现在来说我的思路,以前我也跟了几个贴子,现在我在此再次重申下。
1:铜公用顶面为零的方法加工2:开粗:先开基准台以上的,定义毛坯方法,用全计算减去基准台的高度(我的宏定义基准台的高度的是10MM,各公司或各人喜好不同,请按照宏里更改。
)算出上面的刀路。
很多朋友问怎么算下面的刀路,定义不到毛坯,我以前也郁闷了几天,后来和A-Tian(kugo)交流了下,解决了这个问题。
呵,打了下广告。
现进入正题,加工下面基准台时,用全定义毛坯。
扩展1MM,刀路用上一把刀的残留,但检测材料厚于这个选项要设多点。
也不要超过扩展的1MM,我这里设定的3: 光侧,用轮廓区域清除表格,一刀到底,加工2-3圈。
若是高速机或精雕用残留方法加工(同开基准台的粗)以上适合大部份类型的铜公,下面说光面的思路。
4:光铜公面,这里牵涉到岛屿的问题,一个岛屿并且比较低的话,就直接用平行光面(自带算边界),比较高的岛屿,用等高光刀加上浅滩的方法来光。
多个岛屿的话运也用等高精加工,但是不要勾螺旋与型腔加工,让他一层一层的光下去,即可。
5:。
若要清角,请自行手工增加刀路,不要因为这点就咬住说这只能算半自动加工,其实大家的概念有误,什么叫全自动调加工图、全方位计算好了,并能按自己的机床参数直接后处理好了这才叫全自动编铜公其实不然,不管怎么说,按宏或VB做出来的,都需要自己去检查与处理一下的,所以,没有全自动编铜公一说。
实际运用第一。
先将小弟的后处理文件复制到C:\dcam\config\ductpost\下。
PowerMILL自动出程式单

自动出程式单
14、将程式单保存到合理位置
自动出程式单
15、在保存位置可以找到程式单
自动出程式单
15、在保存位置可以找到程式单
自动出程式单
1、先将图档程式后处理好
自动出程式单
2、鼠标右键找到PowerMill Utilities V6.05
自动出程式单
3、找到下图所示位置
自动出程式单
4、找到下图所示位置
自动出程式单
5、将所有刀路显示出来
自动出程式单
6、将同一刀路中可以不显示的刀路不勾选
Hale Waihona Puke 自动出程式单 7、找到如下所示位置
自动出程式单
8、进入如下界面进入如下所示位置
自动出程式单
9、进入如下界面进入如下所示位置按接受
自动出程式单
10、找到如下所示位置
自动出程式单
11、将工件按俯视图摆放好
自动出程式单
12、将第一个程式名及照相机按所示进行拍照
自动出程式单
13、找到如下所示位置将程式单保存
powermill教程

再说说雕刻机和A轴的选择对雕刻机的要求是龙门高度可以安装A轴,Z轴行程够大(考虑到刀具长度不同,Z行程比最大夹持直径还要大20mm以上)XYZA垂直精度高。
因为不像3轴,雕同一个点XYZ只能是同一个坐标,4轴雕同一个点XYZA会有不同的组合,如果垂直精度不高,就会有明显的接缝。
要求最高的是A轴安装一定要平行于X轴。
A轴调整后,可以分别用铣刀在顶端和在侧面回转铣两个圆柱,量量每个圆柱的两端直径是不是一样,如果小于5丝,就差不多了。
另外速度最好快一点,一个雕塑用f1600跑完2个小时,f400就要8个小时了A轴的选择A轴通常有这几种方案:直驱,同步带减速,谐波减速,蜗杆减速,行星减速4轴最有效率的加工方式应该是四轴全联动(powermill支持不好),就是XYZA都是连续运动,这种情况对A轴的速度,精度,回差要求都比较高。
回差比较小的有谐波减速,直驱,同步带(同步带不知道刚性是否满足要求),其中谐波减速有点慢,直驱和同步带精度太低。
蜗杆传动和行星减速速度和精度比较平衡,可是却有回差。
虽然mach里可以消除,不过在频繁换向的情况下多少影响一点速度。
所以A轴还没找到完美的方案不过如果不追求四轴联动(比如可以用3+1轴,即XYZ连续运动,A间断运动),通过刀路的设计可以克服这些缺点。
速度慢的就3+1轴的方式,A轴就间断转动,以及旋转加工时X轴优先动精度差的用来翻面没问题,旋转加工的时候旋转步距和A轴步距设成一致有回差的单向转动就可以了。
绝大部分情况单向转动都能搞定,或者通过mach消除回差下面慢慢写点做3D雕塑的方法和感想。
有空就写一点,大家不用等我在机械方面刚入门,只是一个爱好者。
说的有什么不对的不周的老鸟们多指教先说题材。
有了四轴,三轴时需要翻面雕刻的东西就会很方便,尤其是需要翻多面的情况。
此外还可以加工其他设备难以加工的工件,比如长螺距的螺纹在一些情况下(比如不掏洞,不车内螺纹),四轴还能够替代车床加工一些工件不过四轴最擅长的应该还是人体雕塑(比如手办,佛像)以及头部雕塑下面主要就这类题材谈谈想法。
powermill程序单变量参数
{Tolerance}{Block.Type}{Block.CoordinateSystem}{Filter.Type}{Filter.Factor}{BoundaryLimit.Keep} {BoundaryLimit.Tool}{ToolAxis.Type}{Block.Limits.XMin}{Block.Limits.XMax}{Block.Limits.YMin}{Block.Limits.YMax}{Block.Limits.ZMin}{Block.Limits.ZMax}{tool.NumberOfFlutes}{tool.Number.Value}{tool.Length}{tool.Identifier}{tool.Diameter}{Verification.Clearance.Head} {Verification.CheckAgainst} {Units}{ToolpathType}{ToolAxis.Type} {ThicknessSetValues.Thickness} {Strategy}{Stepdown}{StartPoint.Type}{StartPoint.Distance} {SpindleSpeed.Value}{Rapid.Type}{Rapid.SafeArea}{Rapid.Plane.PlungeDistance} {Rapid.Plane.Normal}{Ordering}{Filter.Type}{Filter.Factor}{FeedRate.Rapid}{FeedRate.Plunging.Value} {FeedRate.FeedPerTooth.Value} {FeedRate.CuttingSpeed.Value} {FeedRate.Cutting.Value} {CutDirection}{AreaClearance.Profile.CutDirection} {Connections.PlungeDistance} {Connections.MoveDirection} {Connections.MaxMoveExtension}{Connections.IncrementalMode} {BoundaryLimit.Tool}{BoundaryLimit.Keep}{Block.Type}{Block.Limits.XMax}{Block.Limits.XMin}{Block.Limits.YMax}{Block.Limits.YMin}{Block.Limits.ZMax}{Block.Limits.ZMin}{AreaClearance.Offset.Type} {AreaClearance.Offset.Preference} {AreaClearance.LeadIn.Type}下面有关图像的参数命令{CompanyLogo}{DelcamLogo}{PMillLogo}{CompanyLogoSRC}{DelcamLogoSRC}{PMillLogoSRC}{setupsheets.project.image_tag} {setupsheets.ncprogram.image_tag} {setupsheets.toolpath.image_tag} {setupsheets.project.image_file_name} {setupsheets.ncprogram.image_file_name} {setupsheets.toolpath.image_file_name} {setupsheets.tool.vml}{ToolType}{ToolTypeSRC}下面有关项目的参数命令{project.date}{project.day}{project.month}{project.notes}{project.path}{project.programmer}{project.time}{project.year}{version}{codebase}{project.customer}{project.partname}{project.orderno}{setupsheets.model.file_name} {setupsheets.model.file_path}{units}{PD_TotalTime}下面有关NC程序的参数命令{project.nc_path}{ncprogram.programmer}{ncprogram.notes}{ncprogram}{ncprogram.partname}{ncprogram.shortname}{ncprogram.specialname}{ncprogram.counter}{ncprogram.date}{ncprogram.option_name}{PD_CutTime}{PD_OutputDirectory}{PD_TapFile}{PD_Units}{ncprogram.workplane}{ncprogram.model.limits.x.max}{ncprogram.model.limits.x.min}{ncprogram.model.limits.y.max}{ncprogram.model.limits.y.min}{ncprogram.model.limits.z.max}{ncprogram.model.limits.z.min}{ncprogram.OptionFile}{ncprogram.statistics.tool_lifts} {ncprogram.statistics.totaltime} {ncprogram.tool_datum}{ncprogram.tool_lifts}下面有关刀具路径策略的参数命令{AllowToolOutsideBlock} {AlternateCutDirection}{AngularDirection}{AngularLimits.End}{AngularLimits.Start}{AngularLimits2.End}{AngularLimits2.Start}{AngularSmoothing}{AngularStepover}{AreaClearance.CalculationType} {AreaClearance.FeatureData}{AreaClearance.LeadIn.ApproachOutside} {AreaClearance.LeadIn.Drill.Pattern} {AreaClearance.LeadIn.Drill.TemplateName} {AreaClearance.LeadIn.Ramp.CircleDiameter} {AreaClearance.LeadIn.Ramp.Follow} {AreaClearance.LeadIn.Ramp.LimitLength.Active} {AreaClearance.LeadIn.Ramp.LimitLength.Value}{AreaClearance.LeadIn.Ramp.MaxZigAngle} {AreaClearance.LeadIn.Ramp.ZagAngle.Active} {AreaClearance.LeadIn.Ramp.ZagAngle.Value} {AreaClearance.LeadIn.Type}{AreaClearance.Offset.Links}{AreaClearance.Offset.Order}{AreaClearance.Offset.Preference} {AreaClearance.Offset.RemoveCusps} {AreaClearance.Offset.SmallestFirst} {AreaClearance.Offset.SmoothingAllowance.Active} {AreaClearance.Offset.SmoothingAllowance.Value} {AreaClearance.Offset.Trochoids.Allowance}{AreaClearance.Offset.Trochoids.Constraint.Active} {AreaClearance.Offset.Trochoids.Constraint.MaxDiame ter}{AreaClearance.Offset.Trochoids.Constraint.MaxStepa long}{AreaClearance.Offset.Trochoids.Constraint.MinDiame ter}{AreaClearance.Offset.Trochoids.Distribution} {AreaClearance.Offset.Type}{AreaClearance.Profile.CornerRadius.Active} {AreaClearance.Profile.CornerRadius.Value} {AreaClearance.Profile.CutDirection} {AreaClearance.Profile.Final.Active} {AreaClearance.Profile.Final.Allowance} {AreaClearance.Profile.Final.Location}{AreaClearance.Profile.Outside}{AreaClearance.Profile.Sequence}{AreaClearance.Profile.SlotSide}{AreaClearance.Raster.Angle.Mode} {AreaClearance.Raster.Angle.Value} {AreaClearance.Raster.ConstantStepover}{AreaClearance.Raster.MachineAll} {AreaClearance.Raster.MinimiseFullWidthCuts}{AreaClearance.Raster.PerpendicularPass} {AreaClearance.Raster.Style}{AreaClearance.Rest.Active}{AreaClearance.Rest.ExpandArea}{AreaClearance.Rest.RefMethod}{AreaClearance.Rest.ReferenceType} {AreaClearance.Rest.ThresholdThickness} {AreaClearance.Rest.Toolpath}{ePreviousZHeights} {AreaClearance.SliceData}{AreaClearance.Slicer.CutterCompensation.MinRadius}{AreaClearance.Slicer.CutterCompensation.Type} {AreaClearance.Slicer.FileName}{AreaClearance.Slicer.Filter.Active} {AreaClearance.Slicer.Filter.EnclosedOnly} {AreaClearance.Slicer.Filter.Mode} {AreaClearance.Slicer.Filter.Threshold} {AreaClearance.Slicer.Flat.AllowToolOutside}{AreaClearance.Slicer.Flat.ApproachAllowance}{AreaClearance.Slicer.Flat.HoleFilterThreshold.Acti ve}{AreaClearance.Slicer.Flat.HoleFilterThreshold.Valu e}{AreaClearance.Slicer.Flat.MultipleCuts.Active} {AreaClearance.Slicer.Flat.MultipleCuts.FinalStepdo wn.Active}{AreaClearance.Slicer.Flat.MultipleCuts.FinalStepdo wn.Value}{AreaClearance.Slicer.Flat.MultipleCuts.Number} {AreaClearance.Slicer.Flat.MultipleCuts.Stepdown} {AreaClearance.Slicer.Flat.Tolerance}{AreaClearance.Slicer.Type}{AreaClearance.SlicerReference}{AreaClearance.ZHeights.Automatic}{AreaClearance.ZHeights.ConstantStepdown} {AreaClearance.ZHeights.Flats}{AreaClearance.ZHeights.List}{AreaClearance.ZHeights.List.Type} {AreaClearance.ZHeights.List.Value} {AreaClearance.ZHeights.Stepdown}{AreaClearance.ZHeights.Type}{AreaClearance.ZHeights.Value}{AxialDepthOfCut.Value} {AxialOffset} {AxialSmoothingTolerance} {AxialThickness} {AxisTolerance}{azimuth} {BaseLimitingWorkplane} {BliskAxisElevation.Angle} {BliskAxisElevation.Axis}{BliskMachiningType} {BliskOperation} {BottomWireframe} {chamfer.clearance} {chamfer.width} {ClosedOffsets} {CornerOutput} {CornerRadius.Active}{CornerRadius.Value}{cusp.active}{cusp.height}{Cusp.MaxStepdown}{CutDirection}{Drill.ChamferDiameter} {drill.clearance}{drill.clockwise}{ponentDepth}{drill.depth.value} {Drill.DepthType}{Drill.DraftAngle.Value} {Drill.DwellTime}{Drill.FeedReduction} {Drill.GougeCheck}{Drill.HoleData}{Drill.HoleIndex}{Drill.IncrementalStart} {Drill.InitialZ}{Drill.MinPeck}{drill.overlap}{Drill.PeckDecrement} {Drill.PeckDepth.Value} {drill.pitch}{Drill.RapidRetract} {Drill.ReduceFeedDistance}{drill.retract}{Drill.RetractFactor} {Drill.RetractFeedFactor} {Drill.StartFeedDistance}{Drill.StartFeedReduction}{Drill.SubsidiaryPeck} {Drill.TopType}{drill.type}{eCycles}{erParameter} {EdgeTolerance} {elevation}{EndPoint.Distance}{EndPoint.ManualToolAxis} {EndPoint.Mode}{EndPoint.MoveDirection} {EndPoint.Position} {EndPoint.SeparateFinalRetract}{EndPoint.ToolAxis} {EndPoint.Type}{FanAtEnd}{FanningDistance} {MinimumStepover} {MultiPencilIndependantSegments} {MultipleCuts} {MultipleCutsStepdown.Active} {MultipleCutsStepdown.Value} {NumberOfBlades} {OffsetDirection}{overlap}{ParametricLimits.Active} {ParametricLimits.End} {ParametricLimits.Start} {ParametricLimits2.Active} {ParametricLimits2.End} {ParametricLimits2.Start} {ParametricOffsetEndCurve} {ParametricOffsetStartCurve} {PerpendicularPass}{Plunge.CoreRadius}{Plunge.PullBack} {PortAreaClearanceMode} {PortAreaClearancePartialSlices} {PortAreaClearancePlaneLimits} {PortAreaClearanceRampDiameter} {PortAreaClearanceRampSlope} {PortOverlap.DistanceToLiftStart}{PortOverlap.Length} {PortOverlap.LiftHeight} {PortOverlap.MidPoint} {PortToolClearance} {ProjectionDirection} {ProjectionOrder} {ProjectionPatternDirection} {ProjectionRange.Automatic} {ProjectionRange.Max} {ProjectionRange.Min} {ProjectionStyle} {ProjectionSurfaceUnits} {RadialDepthOfCut.Value} {RadialOffset}{RasterAngle}{RemoveShallowSlices}{ReverseAxis}{RotaryType}{RulingsTolerance}{spiral}{StartCorner}{StartOnPattern}{StartPoint.Distance} {StartPoint.ManualToolAxis} {StartPoint.Mode}{StartPoint.MoveDirection} {StartPoint.Position} {StartPoint.SeparateFirstApproach}{StartPoint.ToolAxis} {StartPoint.Type}{stepdown}{StepdownLimit.Active} {StepdownLimit.Value}{stepover}{StepoverLimit.Active} {StepoverLimit.Value}{strategy}{SurfaceNormalSmoothingTolerance} {SurfaceSide}{SwarfBasePosition}{thickness}{ThicknessSets}{ThresholdAngle}{tolerance}下面有关刀具路径连接的参数命令{Connections.ApproachDistance} {Connections.ArcFittingRadius.Active} {Connections.ArcFittingRadius.Value} {Connections.AxisDiscontinuityThreshold}{Connections.DefaultLink}{Connections.DefaultLink.Type} {Connections.ExtendMove}{Connections.FirstLeadIn.Angle} {Connections.FirstLeadIn.Distance} {Connections.FirstLeadIn.Radius} {Connections.FirstLeadIn.Ramp.CircleDiameter} {Connections.FirstLeadIn.Ramp.ClosedProfiles}{Connections.FirstLeadIn.Ramp.Extend}{Connections.FirstLeadIn.Ramp.Follow} {Connections.FirstLeadIn.Ramp.Height.Type} {Connections.FirstLeadIn.Ramp.Height.Value} {Connections.FirstLeadIn.Ramp.LimitLength.Active} {Connections.FirstLeadIn.Ramp.LimitLength.Value} {Connections.FirstLeadIn.Ramp.MaxZigAngle}{Connections.FirstLeadIn.Ramp.ZagAngle.Active} {Connections.FirstLeadIn.Ramp.ZagAngle.Value} {Connections.FirstLeadIn.Type}{Connections.GougeCheck}{Connections.HolderCheck}{Connections.IncrementalMode}{stLeadOut.Angle}{stLeadOut.Distance} {stLeadOut.Radius}{stLeadOut.Ramp.CircleDiameter} {stLeadOut.Ramp.ClosedProfiles} {stLeadOut.Ramp.Extend}{stLeadOut.Ramp.Follow} {stLeadOut.Ramp.Height.Type} {stLeadOut.Ramp.Height.Value} {stLeadOut.Ramp.LimitLength.Active} {stLeadOut.Ramp.LimitLength.Value} {stLeadOut.Ramp.MaxZigAngle}{stLeadOut.Ramp.ZagAngle.Active} {stLeadOut.Ramp.ZagAngle.Value} {stLeadOut.Type} {Connections.LeadIn}{Connections.LeadIn.Angle}{Connections.LeadIn.Distance}{Connections.LeadIn.Radius}{Connections.LeadIn.Ramp.CircleDiameter} {Connections.LeadIn.Ramp.ClosedProfiles} {Connections.LeadIn.Ramp.Extend}{Connections.LeadIn.Ramp.Follow} {Connections.LeadIn.Ramp.Height.Type} {Connections.LeadIn.Ramp.Height.Value} {Connections.LeadIn.Ramp.LimitLength.Active} {Connections.LeadIn.Ramp.LimitLength.Value} {Connections.LeadIn.Ramp.MaxZigAngle}{Connections.LeadIn.Ramp.ZagAngle.Active} {Connections.LeadIn.Ramp.ZagAngle.Value} {Connections.LeadIn.Type}{Connections.LeadInExtension.Angle} {Connections.LeadInExtension.Distance} {Connections.LeadInExtension.Radius} {Connections.LeadInExtension.Type} {Connections.LeadOut}{Connections.LeadOut.Angle}{Connections.LeadOut.Distance} {Connections.LeadOut.Radius}{Connections.LeadOut.Ramp.CircleDiameter} {Connections.LeadOut.Ramp.ClosedProfiles}{Connections.LeadOut.Ramp.Extend}{Connections.LeadOut.Ramp.Follow} {Connections.LeadOut.Ramp.Height.Type} {Connections.LeadOut.Ramp.Height.Value} {Connections.LeadOut.Ramp.LimitLength.Active} {Connections.LeadOut.Ramp.LimitLength.Value} {Connections.LeadOut.Ramp.MaxZigAngle}{Connections.LeadOut.Ramp.ZagAngle.Active} {Connections.LeadOut.Ramp.ZagAngle.Value} {Connections.LeadOut.Type}{Connections.LeadOutExtension.Angle} {Connections.LeadOutExtension.Distance} {Connections.LeadOutExtension.Radius} {Connections.LeadOutExtension.Type} {Connections.LeadsAtAxisDiscontinuities} {Connections.LeadsOnShortLinks} {Connections.LongLink}{Connections.LongLink.Type}{Connections.MaxMoveExtension} {Connections.MoveDirection}{Connections.MoveStartPoints}{Connections.OverlapDistance}{Connections.PlungeDistance} {Connections.RadialClearance}{Connections.RapidSkim} {connections.reorientate} {connections.resolve} {Connections.RetractDistance} {Connections.SeparateFirstLeadIn}{Connections.SeparateLastLeadOut} {Connections.ShankCheck} {Connections.ShortLink} {Connections.ShortLink.Type} {Connections.SkimDistance}{Connections.ThresholdDistance} {JoinRadius}{JoinTolerance}{rapid.box.corner}{Rapid.Box.ExcludedSurfaces.XMax} {Rapid.Box.ExcludedSurfaces.XMin} {Rapid.Box.ExcludedSurfaces.YMax}{Rapid.Box.ExcludedSurfaces.YMin} {Rapid.Box.ExcludedSurfaces.ZMax} {Rapid.Box.ExcludedSurfaces.ZMin} {Rapid.Box.XLength}{Rapid.Box.YLength}{Rapid.Box.ZLength}{rapid.cylinder.axis}{Rapid.Cylinder.PlungeRadius} {rapid.cylinder.point}{rapid.cylinder.radius}{Rapid.IncrementalSafeZ} {Rapid.IncrementalStartZ}{Rapid.MinimiseOffSurface} {rapid.plane.distance}{rapid.plane.normal}{Rapid.Plane.PlungeDistance}{Rapid.SafeArea}{rapid.sphere.centre}{Rapid.Sphere.PlungeRadius}{rapid.sphere.radius}{rapid.type}{rapid.workplane}下面有关刀具路径主轴转速和进给率的参数命令{AxialDepthOfCut.Value}{cut}{coolant.value}{FeedRate.Cutting.Value}{FeedRate.CuttingSpeed.Value}{FeedRate.Cycle}{FeedRate.DepthOfCut}{FeedRate.FeedPerTooth.Value}{FeedRate.PlungeFactor}{FeedRate.Plunging.Value}{FeedRate.Rapid}{FeedRate.SurfaceSlope}{eOverhang}{eWorkDiameter}{plunge}{rapid}{RadialDepthOfCut.Value}{spindle}{VariableFeedRate}下面有关刀具路径定义,推定和编辑的参数命令{computed}{coolant.value} {counter}{DatumX}{DatumY}{DatumZ}{degouge.active} {Degouge.EmbeddedMode} {degouge.method} {degouge.tolerance}{description}{DiscAxis.Elevation} {DiscAxis.Orientation} {EditHistory}{history.codebase} {history.cost}{history.hash} {History.HashVersion} {history.modified} {IDX}{height_above_model} {incomplete}{LimitMethod}{LinearLimits.End} {LinearLimits.Start} {LinearLimits2.End} {LinearLimits2.Start} {MaxDistanceBetweenPoints.Active}{MaxDistanceBetweenPoints.Value}{mesh.factor}{Mesh.MaxTriangleSize.Active}{Mesh.MaxTriangleSize.Value} {Method.FileName}{Method.SplitTolerance}{method.xml}{movement_type}{notes}{ordering}{operation} {ReferenceToolpath}{revision}{strategy}{sorting}{toolpath}{ToolpathType}{TP_TapFile}{TPXMax}{TPXMin}{TPYMax}{TPYMin}{TPZMax}{TPZMin}{Workplane}{WKPL_Name}{WKPL_X}{WKPL_Y}{WKPL_Z}{workplane.ncangle.x}{workplane.ncangle.y}{workplane.ncangle.z}下面有关刀具路径统计学参数命令{axial_thickness}{cut}{CutTime}{CutDir}{CutLength}feedrate.cutting}{feedrate.plunging}{global_thickness}{LevelMove}{linear_stepover}{plunge}{radial_thickness}{rapid}{SafeZ}{spindle}{SpindleSpeed.Value}{spindle_speed}{StartZ}{step}{stepdown}{thickness}{tolerance}{TotalTime}下面有关刀具和夹持参数命令{clearance.head}{clearance.holder}{clearance.shank}{CutLength}{CollisionAvoidance.Active} {CollisionAvoidance.Clearance.Holder} {CollisionAvoidance.Clearance.Shank} {CollisionAvoidance.Curve} {CollisionAvoidance.Direction} {CollisionAvoidance.Origin} {CollisionAvoidance.Type} {CollisionCheck}{comp_n_len} {comp_n_lower} {comp_n_upper}{tool.coolant} {MCLength} {overhang} {TapAng} {TapLen}{TH_Straight} {tool.description} {tool.diameter} {tool.drillAngle}{ToolID}{Tool.Holder[n].Length} {Tool.Holder[n].LowerDiameter} {Tool.Holder[n].UpperDiameter} {tool.identifier}{tool.length}{}{tool.number}{tool.NumberOfFlutes}{tool.gauge_length}{tool.holder_filename}{tool.holder_name}{tool.RoutingEndMillDiameter} {tool.TaperAngle}{tool.TaperDiameter}{tool.TaperHeight}{tool.tip_radius}{tool.TipRadiusCentre}{tool.ToolFamily}{tool.type}{tool.radius}{Tool.Shank[n].Length}{Tool.Shank[n].LowerDiameter}{Tool.Shank[n].UpperDiameter}{TS_Straight}{ReferenceTool}{Safety.Holder.Cutting.Status}{Safety.Holder.Leads.Status}{Safety.Holder.Links.Status}{Safety.Tool.Cutting.Status}{Safety.Tool.Leads.Status}{Safety.Tool.Links.Status}下面有关模型,毛胚和边界参数命令{boundary}{BoundaryExtra}{BoundaryLimit.Keep}{BoundaryLimit.Tool}{block.boundary}{Block.BoundaryData}{block.centre.x}{block.centre.y}{block.centre.z}{Block.CoordinateSystem}{Block.FileName}{Block.Limits.XLength}{Block.Limits.YLength}{Block.Limits.ZLength}{Block.Limits.XMax}{Block.Limits.XMin}{Block.Limits.YMax}{Block.Limits.YMin}{Block.Limits.ZMax}{Block.Limits.ZMin}{block.radius}{Block.TriangleData}{block.type}{StockModelState.Entity} {StockModelState.StockModel}下面有关特征设置和模板参数命令{FeatureSet}{origin}{pattern}{PatternBasePosition}{PatternOrder} {PatternProjectionDirection} {PatternStyle}{ProfileBasePosition}{ProfileGeometry.CutDepth}{ProfileGeometry.MinCurvatureRadius} {ProjectionPatternDirection}下面有关最后确认参数命令{Verification.AdjustTool} {Verification.CalculateCollisionDepth} {Verification.CheckAgainst} {verification.clearance.head} {verification.clearance.holder} {verification.clearance.shank} {Verification.CollisionChecked} {Verification.GougeChecked} {Verification.MinLength}{Verification.OutputSafeMoves}{Verification.OutputUnsafeMoves}{Verification.OverlapDistance}{verification.reorder}{verification.scope}{Verification.SelectiveCheck}{Verification.SplitMoves}{Verification.SplitToolpath}{Verification.StockModelState.Entity}{Verification.StockModelState.StockModel}{verification.type}下面有关页码参数命令{SU_SheetNo}{SU_MaxSheets}下面有关变量参数命令{tool.diameter/2}{{3.5 + feedrate.cutting}*2}{2*stepover}You cannot use string variables such as {project.partname}, {notes}, {totaltime}, with th {CutTime*模型公差毛坯类型边界的坐标系点分布类型点分布公差边界剪裁保留边界剪裁刀具刀轴类型最小X毛坯界限最大X毛坯界限最小Y毛坯界限最大Y毛坯界限最小Z毛坯界限最大Z毛坯界限刀具刃数刀具编号刀具长度刀具名称刀具直径头部净空数量刀具路径检查对照单位刀具路径类型刀轴类型径向余量策略类型行距开始安全高度掠过距离主轴转速快进类型安全区域开始Z高度安全Z高度加工顺序点分布输出类型点分布公差系数掠过进给率下切进给率每齿进给率表面速度切削进给率切削方向轮廓切削方向下切距离撤回和接近移动沿着类型自动延伸距离相对距离边界剪裁刀具边界剪裁位置毛胚类型毛胚+X距离毛胚-X距离毛胚+Y距离毛胚-Y距离毛胚+Z距离毛胚-Z距离加工类型加工参数选择Z轴下切方式company标识语(CompanyLogo.jpg).Delcam 标识语(DelcamLogo.jpg). PowerMILL标识语(PMillLogo.jpg).源文件company标识语(CompanyLogo.jpg).源文件Delcam标识语(DelcamLogo.jpg).源文件PowerMILL标识语(PMillLogo.jpg).项目水平快照(ProjectSnapshot.png).NC程序快照最好使用在刀具路径的模板上刀具路径快照最好使用在刀具路径的模板上源文件水平快照(ProjectSnapshot.png).源文件NC快照最好使用在刀具路径的模板上源文件刀具路径快照最好使用在刀具路径的模板上刀具图片最好使用在刀具路径的模板刀具图像最好使用在刀具路径的模板上源文件刀具类型图像最好使用在刀具路径的模板上日期创造格式: YYYY-MM-DD.天格式月格式项目水平项目路径编程员项目时间年格式PowerMILL版本号PowerMILL ID号消费者名称零件名称订购数量模型文件名称PowerMILL 项目模型文件路径单位项目总时间NC程序输出目录NC程序员NC编程注意NC程序名称当前零件名称到NC程序简写的NC名称简写的NC名称NC程序计算器NC程序日期NC程序后处理文件名称NC程序加工时间NC程序文件输出目录组合的NC程序文件名称单位NC程序坐标系NC程序+X距离NC程序-X距离NC程序+Y距离NC程序-Y距离NC程序+Z距离NC程序-Z距离后处理文件名称NC程序的刀具数量NC程序的总切削时间刀具位置输出NC程序的刀具数量Allow the tool outside the block.Alternate the cutting direction of multiple cuts. Angular direction to machine in.End angle.Start angle.End angle.Start angle.Angular tolerance to which surface normals of splined curve must match surface normals of surface pattern. Angular step between passes (in degrees).Type of Area Clearance toolpath calculation.Area clearance input feature data.Allow level moves to approach the block from outside.Pattern to use for input drilling positions.Name for output drilling pattern/feature.Diameter of the circle in TDU.Controls the direction of the ramp.Enable limiting.Maximum length of ramp in TDU.The angle of descent formed when the tool ramps into the block.Enable independent zag angle control.Zag angle.Lead-in type.Type of link moves to apply between offsets.Order in which to machine offsets.Offset machining preference. Remove cusps created by the tool tip and requested stepover.Machine smallest islands of material first to avoid tool damage.Use offset smoothing. Maximum deviation from the sharp corner (%).Maximum overload that the tool can withstand before trochoidal movement is required (% stepover). Enable trochoidal moves constraint.Trochoidal move maximum diameter (TDU).Trochoidal move maximum stepalong (TDU).Trochoidal move minimum diameter (TDU).Distribution of trochoidal movements.Type of offsetting to use. Activate profile smoothing. Smoothing corner radius (tool diameter units). Machining direction for profile moves.Perform a final profile pass.Allowance for final profile pass.Specifies when the final profile pass is performed.Machine block outer profiles.Determines where profile moves are performed. Specifies the positioning of the tool with respect toslot features.Method of determining raster angle.Raster angle.Maintain a constant stepover. Uses a constant stepover within each area, so that cutter passes lie on both edges of each area. Machine all raster spans. This allows the tool to overmachine, but keeps the overall tool load more constant, which is betterfor high speed machining. Minimise full width cuts. This removed (as much as possible) all raster moves that could cause the tool to cut on its full width. Repeat with a second raster pattern at right angles to the first.Style of rasters.Activate rest machining. Offset rest area by this amount.Method of treating Z heights from reference toolpath. Type of reference entity to use for rest machining.Only machine rest material thicker than this value. Reference toolpath. This is used to obtain the tolerance and thickness used to generate the rest data.Use Z heights from a previous toolpath.Slice data.Minimum radius.Cutter compensation type. Path of file from which to load slices.Activate area filter.Only filter enclosed areas. Filtering mode.Threshold value forfiltering (tool diameter units).Allow the tool outside the flat area.Approach allowance for flat slices (TDU).Activate ignoring of holes. Threshold diameter for holes to be ignored (TDU). Activate multiple cuts.Use a different final stepdown.Final stepdown value. Number of cuts to make. Stepdown value.Flat detection tolerance (0 indicates fixed tolerance). Slicer type.Area clearance slicer reference.Automatically calculate Z heights.Maintain constant stepdown when manually calculating Z heights.Automatically detect flat areas.List of Z heights.Z Height history type.List of Z heights. Stepdown for automatic Z height calculation.Method for manual Z height calculation.Value used for manual Z height calculation.Recommended value for axial depth of cut.Height of the toolpath above drive-curve.Smoothing distance alongtool axis (TDU).Machining axial thickness value.Tolerance used to calculate tool axis. A small value could mean large axis movement, a large value could mean less axis movement but material unmachined (0 means automatic).Azimuth angle.Workplane to limit swarf upper position.Elevation angle.Reference for tool axis elevation angle.Machine entire model or single blade.Machine blade or sides of pocket.Bottom wireframe reference. Tooltip clearance for chamfer.Chamfer.Creates closed offset paths. Which sections of corner toolpath to output.Fit arcs to internal corners of the toolpath where possible.Arc radius to use whenfitting arcs to corners, as a proportion of the tool diameter.Enable automatic calculation.Maximum cusp height permitted.Maximum stepdown when calculating using cusp height.Machining direction. Drilling.Drilling clearance. Clockwise.Depth to be drilled from component top.Drilling depth.Drilling depth type.Drilling draft angle.Drilling dwell.Drilling feed reduction. Gouge check drilling toolpath.Drilling toolpath's output drilling data.Index of component in compound hole.Drilling start position. Drilling safe position. Drilling minimum peck. Drilling.Drilling peck decrement. Drilling peck depth. Tapping pitch.Drilling.Drilling reduce feed distance.Drilling retract.Drilling.Drilling.Drilling reduce feed distance at hole top.Drilling feed reduction at hole top.Subsidiary peck.Drilling top position. Drilling type.Gouge check drilling toolpath.Drilling user parameter. Trimming tolerance used to reduce the noise ofresulting toolpath near the start and end curves. Elevation angle.Distance above last point at which to position end point.Ensures that a specific orientation is used at the end point.Define how the end point should be updated.Direction in which to define the incremental move.The coordinates of the end point.Enables the length and direction of the final retract move to be set differently from the general link settings.Tool axis vector at the end point.Defines how the end point is set.If set, fanning will happen only in the end region of a plane, otherwise fanningwill happen everywhere. Minimum fanning distance. Minimum allowable stepover. Machine segments independently in multipencil toolpaths.Multiple cuts mode.Enable multiple cuts. Stepdown.Number of blades.The direction of offsetting. Overlap between steep and shallow regions.Use parametric limits.End parameter.Start parameter.Use secondary parametric limits.End parameter.Start parameter.End spine reference.Start spine reference. Machine an additional raster pass perpendicular to the first one.Radius of the non-cutting part of the tool (0 for centre cutting tool).Length of pullback move (0 for none).Direction attempts to machine slices.Machine partially accessible slices.Use planes to define limits of port.Diameter of ramp in TDU. Slope of spiral between slices.Distance before mid point of overlap toolpaths begins to lift from model.Length of overlap.Height of lift of toolpath from model at mid point of overlap.Mid point of overlap of segments from opposite ends of ports.Tool clearance.Direction to project in. Order in which to machine toolpath.Direction of pattern.Use automatic projection range.Maximum value of projection range.Minimum value of projection range.Projection machining type. Describes how stepover is defined.Recommended value for radial depth of cut.Clearance between tool and surface.The angle of the primary raster pass relative to the x-axis.Remove shallow Z slices.Rotates the axis direction by 180 degrees.Rotary machining technique. Angular tolerance to calculate rulings between wireframe references.Create a spiral toolpath. Corner at which to start machining.Start on the pattern, rather than 1/2 an offset away from it.Distance above first point at which to position the start point.Ensures that a specific orientation is used at the start point.Define how the start point should be updated.Direction in which to define the incremental move.The coordinates of the start point.Enables the length and direction of the first approach move to be set differently from the general link settings.Tool axis vector at thestart point.Defines how the start point is set.Vertical step between machined levels.Only machine the specified number of steps down.The number of steps down to machine.Distance between consecutive passes.Only machine the specified number of stepovers.The number of stepovers to machine.The type of strategy to machine with.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动出程式单
8、进入如下界面进入如下下界面进入如下所示位置按接受
自动出程式单
10、找到如下所示位置
自动出程式单
11、将工件按俯视图摆放好
自动出程式单
12、将第一个程式名及照相机按所示进行拍照
自动出程式单
13、找到如下所示位置将程式单保存
自动出程式单
1、先将图档程式后处理好
自动出程式单
2、鼠标右键找到PowerMill Utilities V6.05
自动出程式单
3、找到下图所示位置
自动出程式单
4、找到下图所示位置
自动出程式单
5、将所有刀路显示出来
自动出程式单
6、将同一刀路中可以不显示的刀路不勾选
自动出程式单
自动出程式单
14、将程式单保存到合理位置
自动出程式单
15、在保存位置可以找到程式单
自动出程式单
15、在保存位置可以找到程式单