模糊自适应整定PID控制仿真实验
模糊自整定PID控制器设计与仿真

糊 PD控制器 , I 结构图如 图 1 所示 :
收稿 日期 :O 8 1 8 z O 一O —1 作者简介 : 林国汉( 9 3 , , 1 7 一)男 硕士 , 讲师 , 研究方 向: 计算机控制
第3 期
林国汉等 : 模糊 自整定 PD控制器设计与仿真 I
13 4 建 立模糊 控 制规则 表 . ..
关键 词 :P D控制 ; I 模糊 控制 ; 自整 定 ; 真 仿 中图分 类号 :T 2 3 文献标 识码 :A P7 文章 编号 :1 7 — 1 9 2 0 ) 3 0 1 - 0 6 1 1 X( 0 8 0 - 0 6 3
P D控 制具有 结构 简单 、 定性 能好 、 靠性 高 I 稳 可 等 优点 , 尤其 适用 于可 建 立 精 确数 学 模 型 的确 定 性 控 制 系统. 是在实 际 的应用 中 , 多数工 业过 程都 但 大
在实 际应用 中 , 一般 是 以误 差 e 误 差 的变 化 和
率 d / te) 为控制器 的输 入 , 以满 足不 同时 刻 ed (c作 可 的e e 和 c对 PD参数 自整定 的要 求. 用 模糊 控 制 I 利 规则在 线对 PD参 数进 行 修 改 , 构 成 了 自适 应 模 I 便
1 7
1 3 2 模糊 控 制器 的结构 ..
单 变 量 二 维 模 糊 控 制 器 的两 个 输 人 语 言 变 量 ( 偏差 e和偏差 变化 ) 以及 3个 输 出语 言变 量 ( KP、 Kl KD的 修 正 值 A 和 KP、 AKl AKD) 和 的模 糊 集 及其论 域定 义如 下 : 误差 e 误差 的变化 率 e 及 c的 模 糊 子 集 均 为 : { B, , , O, S P , B )子 集 中各 个 元 素 N NM NS Z P , M P , 分别 代表 负大 , 中 , 小 , , 小 , 中 , 大. 负 负 零 正 正 正 将 误差 e 误 差 的 变化 率 e 及 c的 变化 范 围定 义 为 模 糊 集上 的论 域l : 3 ]
智能控制作业_模糊自适应PID控制
模糊自适应PID 控制的Matlab 仿真设计研究姓名:陈明学号:201208070103班级:智能1201一、 模糊控制思想、PID 控制理论简介:在工业生产过程中,许多被控对象受负荷变化或干扰因素很多基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
通过matlab 软件进行实例,仿真表明, , 提高控制系统实时性和抗干扰能力,易于实现.便于工程应用。
1.1 模糊控制的思想:应用模糊数学的基本理论和方法, 控制规则的条件、操作用模糊集来表示、并把这些模糊控制规则以及有关信息, 诸如PID 控制参数等作为知识存入计算机知识库, 然后计算机根据控制系统的实际情况(系统的输入, 输出) , 运用模糊推理。
1.2 PID 算法:u(t)=k p * e(t)+k i * ∫e(t)t 0dt +k d *de(t)dt= k p *e(t)+ k i *∑e i (t) + k d * e c (t)其中, u (t) 为控制器输出量, e(t) 为误差信号, e c (t)为误差变化率, k p , k i , k d 分别为比例系数、积分系数、微分数。
然而,课本中,为了简化实验难度,只是考虑了kp ,ki 参数的整定。
1.3 模糊PID 控制器的原理图:二、基于Matlab的模糊控制逻辑模块的设计关于模糊逻辑的设计,主要有隶属函数的编辑,参数的选型,模糊规则导入,生成三维图等观察。
2.1 模糊函数的编辑器的设定:打开matlab后,在命令窗口输入“fuzzy”,回车即可出现模糊函数编辑器,基本设置等。
基于课本的实验要求,我选的是二输入(e, e c)二输出(k p ,k i)。
需要注意的是,在命名输入输出函数的时候,下标字母需要借助下划线的编辑,即e_c 能够显示为e c。
2.2四个隶属函数的N, Z, P 函数设定:在隶属函数的设定中,N 选用的是基于trimf(三角形隶属函数) , Z是基于zmf(Z型隶属函数),P是基于smf(S型隶属函数)。
模糊自适应PID控制的仿真研究

10 2 ) 0 0 9
A src:h te r f rp ro I e rl Df rnil I )o t l b t t e h oy P o ot n n ga a T o i t i e t ( D c nr e aP o
s s e i nr u e .Th tu t r n r ai a in o D c n r l s y t m s it od c d e s r c u e a d e l t fPI o to l z o er i i l a d t c n r e e t i g o . O s smp e n i s o t oI f c s o d S PI c n r l r i wiel D o t e s ol d y u e n t e n u ti c n r lpr c s .Ho v rt s ii ut f PI s d i h id s r al o to o e s we e . i i df c l or D f c n r l r t auo o to l s o e t ma i al c n io t e r a ame e s t l c y o dt n h i i p r t wh n h r e t e
维普资讯
自适应模糊PID控制器的设计与仿真

自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
模糊PID控制器的仿真研究
建 电
脑
21 0 0年第 5期
模糊 PD控 制器 的仿 真研 究 I
董湘君 ,曾 莹 ,陈 文
( 东技 术 师 范 学 院 自动 化 学 院 广 东 广 州 5 0 3 广 16 5)
【 摘 要】 :本 文针对 电炉这种非线性、 大时滞系统 , 比较研究 了模糊控制、 糊 PD控 制、 模 I 史密斯模糊 PD控制 等三种 I 炉 温控 制 方法 。仿 真结 果 表 明 , 密 斯模 糊 PD控 制 方 法 因其 调 节 时 间短 、 史 I 无超 调 、 静 差 , 无 能对 电炉 炉 温 实现 有 效 的 控制 。 【 键 词 】 模 糊 PD; 关 : I 温度 控 制 ; 密斯 预估 器 史
初 始 PD 参 数 的 整 定 : 测 定 被 控 对 象 参 数 的粗 略 值 。 用 初 I 先 应 值 整定 规 则 确定 PD 的初 始值 ;第 二 步 ,I 参 数 的 在 线整 定 : I PD 监 测 控 制 系 的 响应 过 程 , 其 模糊 化 , 合 用 户 期 望 、 制 目标 将 综 控 类型、 对象 参 数 等 , 用 模 糊 推 理 自动 进 行 PD 参 数 的 在 线 整 运 I
0 引言 、
该 系统 在参 数 。 、 与 偏差 和 偏 差 变化 之 间 建立 了在 线 、 .
电 炉是 热 处 理 生 产 中应用 最 广 的加 热 设 备 .其 控 制 系 统 是 自词 整 算法 .满 足 了 系 统在 不 同 的偏 差 和 偏差 变 化 下 对 控制 参 时变 、 线 性 、 时滞 的复 杂 系统 , 学 模 型 很难 精 确 建 立 。 采 数 的不 同要 求 。 糊 PD控 制 器分 两 步 整定 PD参 数 。 一 步 。 非 大 数 若 模 I I 第
模糊PID控制仿真与实验研究
r u t. es ls Ke ywo ds:F z D o r l r uz y PI c nto :Si l to mu ai n: Ex e me t pr i n
传统 的 PD控 制器 结 构简 单 ,具 有一 定 的鲁 棒 I 性 ,稳态无 静差 ,长期 以来 广 泛应 用 于工 业 过程 控 制 ,取得 了良好 的控制效果 。智能化 的模糊控制不要 求被控对象 的精确模 型而且 适应性强 。参数 自适 应模糊 PD控 制器 在控制 策略上仍 保 留 PD控 制器 , I I
模 糊 PD控 制 仿真 与实 验研 究 I
邢峰 ,张让辉 ,王敦 富 ,支晓华
( .重 庆3 商职 业 学院 ,重庆 4 0 5 ; 1 - 0 0 2
2 .山东汽车弹簧厂有限公 司,山东淄博 250 ) 500
摘要 :为了解 决用传统控制策略难 以解决 的复杂 、非线性 、不确定性 系统 的控 制问题 ,基 于专 家经验建立 了模糊控制 规则集合 用来 修正 PD参数 ,使 PD的控制效果达 到最佳。运用 Ma a I I tb软件对建立 的模糊 PD控制 系统性能进行 了仿真分 l I 析 ,并进 一步通过车身振动主动控制实验验证 了该控制 系统的有效性 。
同时采用模糊 推理 的方法作 为常规 PD控制器 的 自调 I 整结构 ,实 际上对 PD控制 器进行 了非线 性 的处理 , I
温度控制系统模糊自适应PID控制器仿真研究
器 。首先建立了烘干炉温度控制系统的数学模 型 , 确定 了系统的输入输 出量 , 建立 了模糊控制 规则 , 进行模糊 推理 , 计算
PD控制器的参数 , I 可由 PD控制器控制烘干炉的温度 , I 采用计算机仿真结果表明, 模糊 自适应 PD控制器 与常规 PD控制 I I
器相 比 , 高了烘干炉温度控制系统 的自适应能力和鲁棒性 , 了系统的动态性能和静态性能 , 较 提 改善 能使非线性 、 大滞后等
ABS RACT:T e tmp e t r o t l ft e d y n v n h ss c r p e sn ni e ry a d t ea u n T h e r au e c n r r i g o e a u h p o lms a o l a t n i d ly d r g oo h n i me i
特殊的系统达到 良好的控制效果。 关键词 : 烘干炉 ; j 比伊 积分微分控制; 模糊控制 ; 模糊 比例积分微分控制
中图 分类 号 :P 7 . T23 4 文 献标 识 码 : B
Em u a i n o l to fFuz y PI Co to n t m p r t e Co t o se z D n r li he Te e a ur n r lSy t m
MA Z a h n—y u, Iቤተ መጻሕፍቲ ባይዱN u o T A J n—z o g MA e—l g hn , Z i n
( e c i e at e t f nvri o n a o , h o h U i ri r a o a t s T ahn D p r n ie t F u d t n T eN r nv syf t n li , g m oU sy i t e t o N i ie Y n h a i x 5 0 1 C ia i u nN n i 7 0 2 , h ) e ga n
模糊自整定PID控制的仿真分析
模糊自整定PID控制的仿真分析本文针对于被控对象模型难以建立,参数不易整定的某些被控系统,利用常规PID在工业领域应用成熟,控制精度高的优点,同时结合模糊控制不需要精确建模、鲁棒性强、容错能力强的特点。
在常规PID控制基础之上,利用模糊控制进行模糊推理,实现PID参数的在线自整定。
利用MATLAB对模糊自整定PID进行仿真分析,仿真结果表明,模糊自整定PID,在响应速度、超调量、稳定性都比常规PID有着明显的提高。
标签:模糊控制; PID控制; 参数自整定; 仿真0 引言自PID控制理论诞生已70余年发展历史,它以结构简单、稳定性好、工作可靠、参数调整简单成为现代工业控制的主要理论之一。
但当被控对象的参数以及结构不能完全掌握或难以精确建立数学模型时,系统控制器的结构和参数必须通过工作人员的丰富经验以及现场试参法来进行确定。
模糊控制适用于模型难以建立、非线性、参数高度耦合、高迟滞的系统。
利用模糊理论在参数整定的优势特点,同时充分发挥PID控制器的优良控制作用,将提高对参数难以整定、耦合度高的被控对象的控制精度。
1 模糊自整定PID 控制器的整体设计1.1 PID 控制原理简介由比例环节、积分环节以及微分环节组成的,通过各环节组成的线性结构对给定输出与实际输出之差进行调节,使执行机构最终达到预定输入量的控制思想被称之为PID控制理论。
图1 PID控制原理框图。
(1)在式(1)中,Kp、Ki以及Kd为PID控制理论三个重要参数,分别表示为比例环节的增益,是无量纲参数;Ki为积分环节的参数,Kd为微分环节增益参数,单位为s。
这些参数需要根据系统状态进行不断调整,主要通过在线辨识方法来完成被控系统参数的整定,最终得到所需的控制结果。
其控制算法为(2)式所示。
Δu(k)=KpΔe(k)+KiΔe(k)+Kd[Δe(k)-Δe(k-1)] (2)(2)式中,为其积分系数,为其微分系数,T为其采样周期。
1.2 模糊控制基本原理模糊控制是基于工程技术人员丰富操作的经验或大量实际操作数据归纳总结出的,用自然语言来表述的,采用编程语言通过计算机控制系统可以实现的算法思想。
模糊自适应整定PID控制仿真实验

实验三模糊自适应整定PID控制仿真实验一、实验目的1.通过实验了解数字PID控制的原理2.通过实验实现离散系统的数字 PID 控制仿真3.通过实验了解模糊自适应整定PID控制的原理4.通过实验实现模糊自适应整定PID控制仿真5.通过实验进一步熟悉并掌握Matlab软件的使用方法二、实验内容1.针对给定离散系统的输入信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.若采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制该模糊自适应整定PID系统的Matlab仿真程序三、实验步骤1.针对给定离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.确定模糊自整定PID的算法基础3.针对 kp, ki , kd 三个参数分别建立合适的模糊规则表4.画出PID参数的在线自校正工作程序流程图5.编制该模糊自适应整定PID系统的Matlab仿真程序四、实验要求1.设被控对象为:采样时间为1ms,采用Z变换进行离散化,经过Z变换后的离散化对象为:yout(k)=-den(2)yout(k-1)-den(3)yout(k-2)-den(4)yout(k-3)+num(2)u(k-1)+num(3)u(k-2)+num(4)u(k-3)针对离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器。
其中,S为信号选择变量,S=1时为阶跃跟踪,S=2时为方波跟踪,S=3时为正弦跟踪。
2.采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制炉温模糊控制系统的Matlab仿真程序五﹑自适应模糊控制的规则1﹑控制规则:2.模糊控制器设计确定为双输入,三输出结构确定每个变量的论域,其中每个变量都有一个模糊子集来表示。
这个模糊子集中有3个模糊子集,分别是:N ,Z ,P 在编辑界面中,确定好每一个语言变量的范围,以及隶属函数的类型。
模糊PID控制实验报告
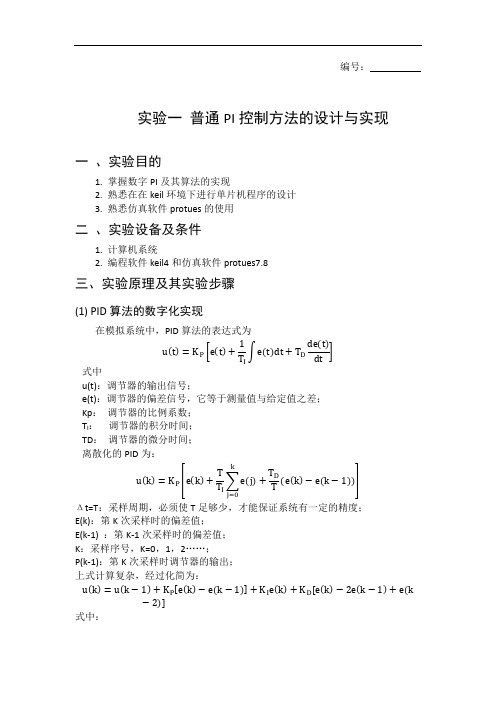
编号:实验一普通PI控制方法的设计与实现一、实验目的1. 掌握数字PI及其算法的实现2. 熟悉在在keil环境下进行单片机程序的设计3. 熟悉仿真软件protues的使用二、实验设备及条件1. 计算机系统2. 编程软件keil4和仿真软件protues7.8三、实验原理及其实验步骤(1) PID算法的数字化实现在模拟系统中,PID算法的表达式为u(t)=K P[e(t)+1T I∫e(t)dt+T Dde(t)dt]式中u(t):调节器的输出信号;e(t):调节器的偏差信号,它等于测量值与给定值之差;Kp:调节器的比例系数;T I:调节器的积分时间;TD:调节器的微分时间;离散化的PID为:u(k)=K P[e(k)+TT I∑e(j)kj=0+T DT(e(k)−e(k−1))]Δt=T:采样周期,必须使T足够少,才能保证系统有一定的精度;E(k):第K次采样时的偏差值;E(k-1) :第K-1次采样时的偏差值;K:采样序号,K=0,1,2……;P(k-1):第K次采样时调节器的输出;上式计算复杂,经过化简为:u(k)=u(k−1)+K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k −2)]式中:K I=K P TT I为积分系数K D=K P T DT为微分系数要计算第K次输出值u(k),只需要知道u(k-1),e(k),E(k-1),e(k-2)即可。
上式也称为位置型PID的位置控制算法。
在很多控制系统中,由于执行机构是采用布进电机进行控制,所以只要给一个增量信号即可。
因此得到增量型PID的位置控制算法。
∆u=K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k−2)] (2) 控制系统的结构框图整个系统的控制框图如下所示:图1 PID控制系统结构框图在本次设计中,经过计算,被控对象的传递函数是:G(s)=1 (SCR)2+3SCR+1其中:C=10uf,R=20K;带入上式后可得:G(s)=10.04S2+0.6S+1显然是一个二阶系统。
模糊自适应整定PID控制及其仿真
出现较 大 的超 调 , 对积 分作 用加 以 限制 , 常取 k一 应 通
0。
作 者 简 介 :杨 建 新 ( 9 8) 女 , 西 长 治 人 , 1 7一 , 山 助教 , 士 研 究 生 , 究 方 向 : 能 控 制 。 硕 研 智
()当 l l 小 时 ,为 使 系 统 具 有 较 好 的稳 定 性 3 较 e
能 , 和 k 均 应取 大些 。同时 ,为避 免 系统 在设定 值 k 时 出现振 荡 , 考 虑系统 抗 干扰 的性 能 , l l 大时 并 当 e较 k 可取小 些 ; l I 小 时 ,k e较 可取 得较 大 些 。
维普资讯
2 O 年 第 5期 O6
杨 建 新 ,等 :模 糊 自适 应 整 定 PD 控 制 及 其 仿 真 I
( )当 ll l l 2 e 和 e 中等 大小时 ,为 使 系统具 有较 小
的超 调 , 应取小 一 些 ,在这 种情 况 下 ,k k 的取值 对 系统 的影 响较 大 ,也应 取小 一些 ,k 的取值 要适 当 。
模 糊 自适 应 整定 P D 控 制及 其 仿 真 I
杨 建 新 ,杜 永贵
( 原理 工 大 学 , 山西 太 原 太 002) 30 4
摘 要 :将 模 糊 控 制 器 与 PD 控 制 器 结 合 在 一 起 ,利 用模 糊 控 制推 理方 法 实 现 对 PD 参 数 的 在 线 自整 定 ,再 对 I I 参 数 变 化 的 情 况 进 行 Malb仿 真 , 真 结 果 表明 , 控 制器 明显 地改 善 了 控 制 系 统 的 动 态 性 能 , 于 实 现 , t a 仿 该 易 便
模糊自适应PID控制器参数整定的研究
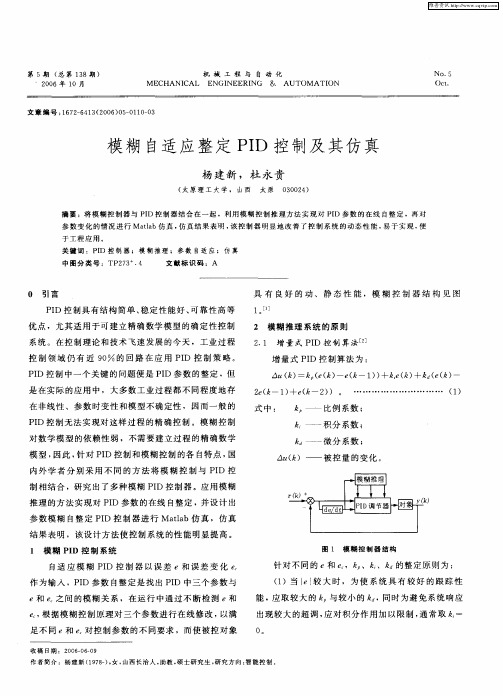
数 K 、 分 系 数 K 和微 分 系 数 K 。PD参 数 模 糊 自整 定 是 找 出 积 I D I
PD 三 个 参 数 和偏 差 e 偏 差 变 化 率 e I 、 c之 间 的模 糊 关 系 , 系 在 统 运 行 中 通 过 不 断 检 测 e和 e , c 根据 模 糊 控 制 原理 来 对 3个 参
11 模 糊 自适 应 PD参 数 控 制 策 略 [ . I 1 以 常规 PD 控 制 为 基 础 , 用 模糊 推理 方 法 , 据 不 同时 刻 I 采 根
的 e和 e c对 PD参 数 进 行 在 线 自整 定 。按 照 这 种 思 想 构 成 的 I 控 制 系 统 由两 部 分 组 成 ,即 常 规 PD控 制 部 分 和 模 糊 推 理 的 参 I
器 , 不 过 它 的 输 入 是 偏 差 e和 偏 差 变 化 率 e 输 出是 比例 系 只 c,
积 分 环 节 作 用 系 数 I 的作 用 在 于 消 除 系统 的稳 定 误 差 。但 < l
K 过 大 , 响 应 过 程 中 会 产 生 积分 饱 和 现 象 , 而 引起 响应 过程 . 在 从
调 节 精 度 。但 K 过 大 , 生 超 调 量 和 振 荡 , 至 导 致 系 统 不 稳 产 甚 定 。 K 取 值 过 小 , 会 降低 调 节 精 度 , 响 应 速 度 变 慢 , 而延 则 使 从
长 调节 时 间 , 系统 静 态 、 使 动态 特 性 变 坏 。
数 校 正 部 分 , 图 1所 示 。 糊 推 理 部 分 实 质 就 是一 个 模 糊 控 制 如 模
式 中 u k 为 系 统 的 第 k采 样 周 期 时 的控 制 器 的 输 出值 , () e
模糊自适应整定PID控制及其仿真
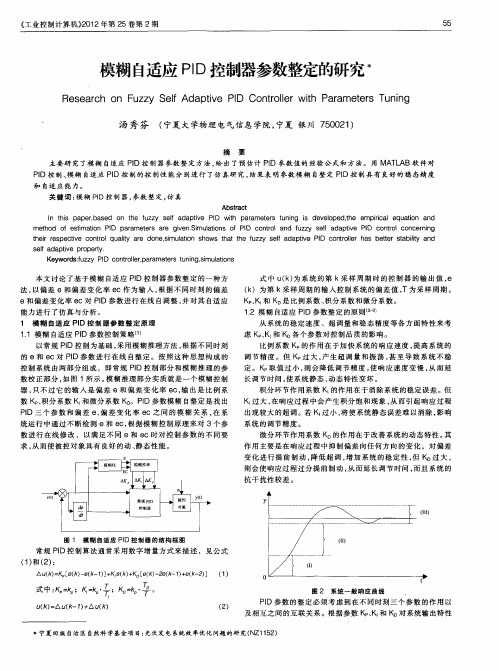
模糊自适应整定P I D控制及其仿真何继爱,田亚菲(兰州大学信息科学与工程学院,甘肃兰州 730000)摘 要: 将模糊控制器与P I D控制器结合在一起,利用模糊控制推理方法实现对P I D参数的在线自整定.进行M A TLAB S I M UL I N K仿真,仿真结果表明,该控制器明显地改善了控制系统的动态性能,易于实现,便于工程应用.关键词: P I D控制器;模糊推理;参数自适应;仿真中图分类号: T P273+4 文献标识码: A 文章编号:100420366(2004)0120063204The Self-Adaptive Tun i ng of Fuzzy P I D Con troller and Its Si m ula tionH E J i2ai,T I AN Ya2fei(Inf or m ation E ng ineering Institue of L anz hou U niversity,L anz hou730000,Ch ina)Abstract: U sing fuzzy inference m akes the param eters of P I D con tro llerself2tun ing by fuzzy logic con tro ller and P I D con tro ller com b inati on is m ade.T he resu lt of si m u lati on in M A TLAB S I M UL I N K indicates that the con tro ller eviden tly i m p roves the dynam ic p roperty of con tro l system.T he con tro ller is easily realized and app lied in engineering.Key words: P I D con tro ller;fuzzy inference;param eter adap tive;si m u lati on P I D控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的确定性控制系统1在控制理论和技术飞速发展的今天,工业过程控制领域仍有近90%的回路在应用P I D控制策略1P I D控制中一个关键的问题便是P I D参数的整定[1]1但是在实际的应用中,大多数工业过程都不同程度地存在非线性、参数时变性和模型不确定性,因而一般的P I D控制无法实现对这样的过程的精确控制1模糊控制对数学模型的依赖性弱,不需要建立过程的精确数学模型,因此,针对P I D控制和模糊控制的各自特点,国内外学者分别采用不同的方法将模糊控制与P I D控制相结合,研究出了多种模糊P I D控制器1应用模糊推理的方法实现对P I D参数进行在线自整定,并设计出参数模糊自整定P I D控制器,进行M A TLAB S I M UL I N K仿真1仿真结果表明,该设计方法使控制系统的性能明显改变11 控制系统的建模及实现方案P I D控制器是一种线性控制器,它根据该定值rin(t)与实际输出值you t(t)构成控制偏差e(t)=rin(t)-you t(t)1(1) P I D的控制规律为[2]:连续情况u(t)=k p(e(t)+1T I∫te(t)d t+T Dd e(t)d t,(2)式中,k p为比例系数;T I为积分时间常数;T D为微分时间常数1数字情况有位置公式(3)及增量公式(4):u(k)=k p e(k)+k i∑kj=0e(j)T+k de(k)-e(k-1)T,(3) ∃u(k)=k p(e(k)-e(k-1))+k i e(k)+k d(e(k)-2e(k-1)+e(k-2))1(4)式中,k i=k P T I,k d=k P T D,T采样周期,k为采样序号1自适应模糊P I D控制器以误差e和误差变化ec第16卷 第1期2004年3月 甘肃科学学报Journal of Gansu SciencesV o l.16 N o.1M ar.2004收稿日期:2003-10-08作为输入,可以满足不同时刻的e 和ec 对P I D 参数自整定的要求1利用模糊规则在线对P I D 参数进行修改,便构成了自适应模糊P I D 控制器,其结构如图1所示1图1 自适应模糊控制器结构图2 M am dani 模糊逻辑系统 P I D 参数模糊自整定是找出P I D 3个参数与e和ec 之间的模糊关系,在运行中通过不断检测e 和ec ,根据模糊控制原理对3个参数进行在线修改,以满足不同e 和ec 是对控制参数的不同要求,而使对象有良好的动、静态性能1从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑,k p ,k i ,k d 的作用如下[2]:(1)比例系数k p 的作用是加快系统的响应速度,1k p 越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定1k p 取值过小,会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏1(2)积分作用系数k i 的作用是消除系统的稳态误差1k i 越大,系统的静态误差消除越快,但k i 过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调1k i 过小,将使系统静态误差难以消除,影响系统的调节精度1(3)微分作用系数k d 的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差进行提前预报1但k d 过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能12 糊控制器的设计最常见的模糊推理系统有3类[3]:纯模糊逻辑系统、高木—关野(T akagi 2Sugeno )型模糊逻辑系统以及具有模糊产生器和模糊消除器的模糊逻辑系统(M am dan i )型1其中的具有模糊产生器和模糊消除器的模糊逻辑系统应用最广泛,下面将以其作为讨论对象1这类模糊逻辑系统的结构如图2所示12.1 语言变量隶属度函数的确定模糊控制器采用两输入三输出的形式,以e 和ec 为输入语言变量,k p 、k i 和k d 为输出语言变量1输入语言变量的语言值均取为“负大”(N B )、“负中”(N M )、“负小”(N S )、“零”(ZO )、“正小”(P S )、“正中”(PM )、“正大”(PB )7种1输出语言变量的语言值均取为“零”(ZO )、“正小”(P S )、“正中”(PM )、“正大”(PB )4种1将偏差e 和偏差变化率ec 量化到(-3,3)的区域内,输出量化到(0,3)的区域内1隶属函数曲线如图3所示1输入e ,ec(a)输出k p ,k i ,k d(b )图3 隶属度函数曲线2.2 建立模糊控制器的控制规则表根据参数k p 、k i 、k d 对系统输出特性的影响,可得出在不同的e 和ec 时,参数自整定原则:(1)当 e 很大时,不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小1同时为了防止积分饱和,此时,应取较大k p ,较小的k d ,k i 取零1(2)当e 3ec >0时,说明误差在朝误差绝对值增大方向变化1此时,若误差较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差绝对值;此时取较大的k p ,k d 不能太大,取较小的k i 值1若误差绝对值较46 甘肃科学学报 2004年 第1期小,控制器实施一般的控制作用,只要扭转误差的变化趋势,使其超误差绝对值减小方向变化1(3)当e 3ec <0、或者e =0时,说明误差的绝对值超减小的方向变化,或者已达到平衡状态1此时,可采取保持控制器输出不变1(4)当e 3ec =0,e ≠0时,表明系统的曲线与理论曲线平行或一致,为使系统具有良好的稳态性能,应采取较大k p 和k i 值,同时辟免设定值附近振荡,并考虑系统的抗干扰性能,适当选取k d 值1设:k p =k p ′+∃k p ,k i =k i ′+∃k i ,k d =k d ′+∃k d ,(5)式中k p ′,k i ′,k d ′为系统的经典P I D 参数,一般用Z 2N 法来确定[5]1根据P I D 参数的整定原则及专家经验,采用IF 2TH EN 形式,可得∃k p ,∃k i ,∃k d 的整定规则如表1所示1表1 ∃k p ,∃k i ,∃k d 的模糊规则表误差 e误差变化率(ec )取值N BN MN SZOPSPMPBN B NB Z O PS NB Z O N S NB Z O NB NM Z O NB N S Z O NB N S Z O NM Z O Z O PS N M NB NM PS NB NM N S NM N S NB N S N S NM N S N S NM Z O Z O N S PS Z O Z O N S NM NB Z O NM NM N S NM N S NM N S N S NM Z O Z O N S PS PS N S PS PS Z O ZO NM NB Z O NM NM N S N S N S N S Z O Z O N S PS PS N S PM PM N S PM PB Z O PS N S N S Z O N S N S Z O Z O Z O Z O PS PS Z O PS PS Z O PM PM Z O PM PB Z O PM N S Z O PB Z O Z O N S PS PS PS PM PS PS NM PS PS PM PM PS PB PM PB PBZ O Z O PBPS Z O PMPM Z O PMPM Z O PMPM Z O PSPB Z O PSPB Z O PB2.3 模糊控制器量化因子及比例因子的确定设误差的基本论域为[-e m ,e m ],误差变化率的基本论域为[-ec m ,ec m ],输出变量论域为[-y i ,y i ];误差和误差变化率量化等级分别为n ,m ,l i ,则误差的量化因子为Αe =ne m,误差变化率量化因子为Αec =mec m ,比例因子为K i =y i l i1e m ,ec m ,y i 应视不同工况而定12.4 模糊推理在线模糊推理机构,它可以根据系统误差e 及其导数值ec 来调整P I D 控制器的3个参数k p ,k i 和k d 1该推理机构可以完成如下的映射[4]:E ×EC →K p f ×K if ×K df ,(6)其中E ,EC ,K p f ,K if 和K df 分别是e ,ec ,k p ,k i 和k d 的模糊值1设模糊关系 R =Yi ,j E i ×EC j ×K x ij 1(7)式中:K x 为K p f ,K if ,K df 1R 的隶属度函数为ΛR (x ,y ,z )=∨i =n ,j =m i =1,j =1ΛE i (x )∧ΛEC j (y )∧ΛK x ij (z )1(8)当误差、误差变化率分别取模糊集E 、EC 时,输出控制量的变化K x (K p f ,K if ,K df )模糊推理可得K x =(E ×EC )oR 1(9)K 的隶属度函数为ΛK x =∨x ∈Xy ∈YΛR (x ,y ,z )∧ΛE (x )∧ΛEC (y )1(10)2.5 去模糊化把模糊量转换为精确量的过程称为清晰化,又称为去模糊化(D efuzzificati on ),或称为模糊判决1去模糊化方法很多,最常见的方法有[3,4]:面积中心法、面积平均法、平均最大隶属度法、最大隶属度取小法、最大隶属度取最大值法、中位数判决法等1面积中心法有称为重心法,即计算隶属度函数曲线包围区域的中心,其数学表达式为k c=∫K ΛK x (z )z d z∫KΛK x (z )d z 1(11)式中K 为论域,z 为变量13 自适应模糊P I D 仿真实现及结果3.1 模糊控制器的编辑在M A TLAB 命令窗口运行Fuzzy 函数进入模糊逻辑编辑器[3],并建立一个新的F IS 文件,选择控制器类型M am dan i 型,根据上面的分析分别输入e ,ec ,k p ,k i 和k d 的隶属函数和量化区间,以If ~then 的形式输入模糊控制规则1取与(and )的方法为m in ,或(o r )的方法为m ax ,推理(i m p licati on )方法为m in ,合成(aggregati on )方法为m ax ,去模糊化(defuzzificati on )方法为重心平均(cen tro id ),这样就建立了一个F IS 系统文件,取名为p id .fis 1当然也可以用M A TLAB 命令来完成156第16卷 何继爱等:模糊自适应整定P I D 控制及其仿真 3.2 利用SI M UL INK 组建控制系统仿真模块图基于M A TLAB S I M UL I N K 图形化建模环境建立的自适应模糊P I D 控制系统仿真模型如图4所示1整个模型由模糊控制器模块、P I D 模块、控制对象及输入输出等部分组成1设仿真对象的数学模型为:图4 系统仿真模型G (s )=20(2s +1)(4s +1)e 0.5s1选用此二阶纯滞后系统是因为它代表了许多工业过程的典型对象1系统输入信号r (t )为阶跃信号1系统运行后,可以利用示波器观察输出的情况,下面给出P I D 控制系统、自适应模糊P I D 控制系统的响应曲线如图51(a )自适应模糊P I D (b )常规P I D图5 仿真结果 从图5中可以看出,采用自适应模糊P I D 控制比常规P I D 控制器的系统超调量明显减小,其快速性也明显提高,同时调节时间大大缩短,从而全面地改善了系统的动态性能1另外,对非线性被控对象进行仿真的结果表明,有自适应模糊P I D 制比P I D 控制器同样可以明显地改善控制系统的动态性能14 结论使用自适应模糊P I D 自整定方法计算量小、易于实现,便于工程应用1比较自适应模糊P I D 控制和常规P I D 控制的输出响应曲线(如图5),可以看出,无论超调量和稳定时间前者的效果都比后者要好得多.此方法较常规P I D 控制不仅对被控参数变化适应能力强,而且在对象模型结构发生较大改变的情况下也能获得较好的控制效果1参考文献:[1]李卓,萧德云,何世忠.基于神经网络的模糊自适应P I D 控制方法[J ].控制与策略,1996,11(3):3402345.[2]刘金琨著.先进P I D 控制及其M A TLAB 仿真[M ].北京:电子工业出版社,2003.[3]吴晓莉,林哲辉编著.M A TLAB 辅助模糊系统设计[M ].西安:西安电子科技大学出版社,2002.[4]刘曙光,魏俊民,竺志超编著.模糊控制技术[M ].北京:中国纺织出版社,2001.[5]李竞,胡保生.模糊P I D 增益调节器的算法、结构及硬件实现[J ].西安交通大学学报,1998,32(5):9213.作者简介:何继爱,(19692)男,甘肃省靖远人,1993年毕业于西北师范大学物理系电子技术专业,现为兰州大学硕士研究生,主要研究方向为信息控制.66 甘肃科学学报 2004年 第1期。
模糊自整定PID控制系统设计与仿真
模糊自整定PID 控制系统设计与仿真 ——俯仰姿态保持模糊PID 控制一、设计内容1、模型与设计要求(1) 某飞机纵向短周期运动状态方程为:X AX BU Y CX=+=。
其中,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq X ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=θαq Y ,[]e U δ=;表示迎角,表示俯仰角速率,表示俯仰角,表示升降舵偏角。
飞机在某状态下的状态参数矩阵为:-0.5698910-2.49155-1.143570010A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,-0.02932.26830B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,100010001C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
(2)设计模糊控制规则。
(3)在MATLAB 下依据整定原理编写仿真程序并调试。
(4)给定输入为阶跃信号,运行程序,记录仿真数据和曲线。
(5)修改模糊控制规则,重复步骤4。
(6)分析数据和控制曲线。
2.报告要求(1)给出模糊控制器的设计过程和程序清单。
(2)记录仿真数据和曲线。
(3)分析仿真结果。
二、设计过程1.概述模糊PID 控制器有多种结构形式,但是工作原理基本一致,即运用模糊数学的基本原理和方法,把规则的条件、操作用模糊集来表示,把这些模糊控制规则以及相关的信息作为知识存入计算机的知识库中,然后计算机根据系统的实际响应运用模糊推理,可实现对PID 参数的最佳调整。
自适应模糊PID 控制器以误差和误差变化作为输入,可以满足不同时刻的和对PID 参数自整定的要求。
利用模糊控制规则在线对PID 参数进行修改,便构成了自适应模糊PID 控制器,其结构如图1所示。
图1 自适应模糊控制器结构PID 参数模糊自整定是找出PID 三个参数k p 、k i 、k d 与e 和ec 之间的模糊关系,在运行中通过不断检测和,根据模糊控制原理来对3个参数进行在线修改,以满足不同和时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
模糊自适应整定PID控制及其仿真研究
P D参数的在线 自整定 , I 进一步完善 了 PD控制器 的性 能 , | 提高了系统的控制精度 。 仿真结果表 明, 该控制器
明显 地 改 善 了 控 制 系 统 的 动 态 性 能 ,便 于 工 程 应 用 。
关 键 词 :P D 控 制 ;模 糊 控 制 ;参 数 自整 定 ;仿 真 I 中图 分 类 号 :TP 7 . TP 9 . 2 3 4: 3 19 文 献 标 识 码 :A
维普资讯
第6 期 ( 第 19期 ) 总 3 20 0 6年 1 2月
机 械 工 程 与 自 动 化
M ECHAN1 CAL ENG1 NEER1 NG 8 AUT(M AT1 乙 ) ON
N o. 6
De . c
文章 编 号 :6 26 1 (0 60 —0 20 1 7—4 3 2 0 ) 60 9—2
模 糊 自适 应整定 P D 控制及其仿 真研 究牛 I
盂 宇 , 彭 晓 华 ,张 浩
( 宁工 程 技 术 大 学 电气 工程 系 , 辽 宁 阜 新 1 3 0 ) 辽 2 0 0
摘 要 :针 对 传 统 P D控 制 器 存 在 的 问题 ,设 计 了 一 种 模 糊 自适 应整 定 P D 控 制 器 ,利 用 模 糊 推 理 方 法 实 现 对 I I
式【: k { —— 比例 系数 ; l k 一一 积分 系数 ; k —— 微 分系数 。
控制 和模 糊控 制二 者结合 ,设 计 了一种 模糊 自适应 整
定 P D控制 器 , 用模 糊 推理方 法实 现对 P D参 数 的 I 应 I 在线 自调 整 。仿 真结 果 表 明该 控制 器 明显地 改善 了控 制系 统 的动态性 能 ,提 高 了系统 的控制 精度 。 1 模 糊 自适应 整定 P D控 制器 的设计 I
自适应模糊整定PID参数..
在工业生产过程中,许多被控对象受负荷变化或干扰因素 影响,其对象特性参数或结构易发生改变。自适应控制运用现 代控制理论在线辨识对象特征参数,实时改变其控制策略,使 控制系统品质指标保持在最佳范围内,但其控制效果的好坏取 决于辨识模型的精确度,这对于复杂系统是非常困难的。因 此,在工业生产过程中,大量采用的仍然是PID算法。PID参 数整定方法很多,但大多数都以对象特性为基础。 随着计算机技术的发展,人们利用人工智能的方法将操作 人员的经验作为知识存入计算机中,根据现场实际情况,计算 机能自动调整PID参数,这样就出现了专家PID控制器。
2
这种PID控制器有一个极点在坐标原点,两个零点均位于 4 Tc 处。故这种方法仅适用于系统的输出能产生持续震荡的 场合。
2018/10/15
10
模糊自适应整定PID控制
必须指出,用上述法则确定PID控制器的参数,使系统的 超调量在10%~60%之间,其平均值约为25%(通过对许多 不同对象试验的结果),这是易于理解的,因为上述两个表中 的参数值也是在平均值的基础上得到的。 由此可知,齐格勒-尼克尔斯法则仅是PID控制器参数调整 的一个起点。若要进一步提高系统的动态性能,必须在此基础 上对相关参数做进一步调整。
0.5 Tc
2018/10/15
9
模糊自适应整定PID控制
求得相应的PID控制器的传递函数: 1 Gc s K p 1 T s d
Ti s 4 s Tc 1 0.6 K c 1 0.125Tc s 0 . 075 K T c c s 0.5Tc s
2018/10/15 16
模糊自适应整定PID控制
模糊自适应PID控制方法研究与仿真
应用模 糊控 制算 法来实 现对 PD参数 的 自动 整定是 一种 比较有效 的解 决方 案 ,即利用 模糊 推理 规则 ,用 实 测 I
ቤተ መጻሕፍቲ ባይዱ
值与设 定 值问 的误 差 以及 误差 变化 率作 为系统 的输入 ,对 PD调节器 的 K 、K 、K I P I D参 数进 行调 整 ,从 而 实
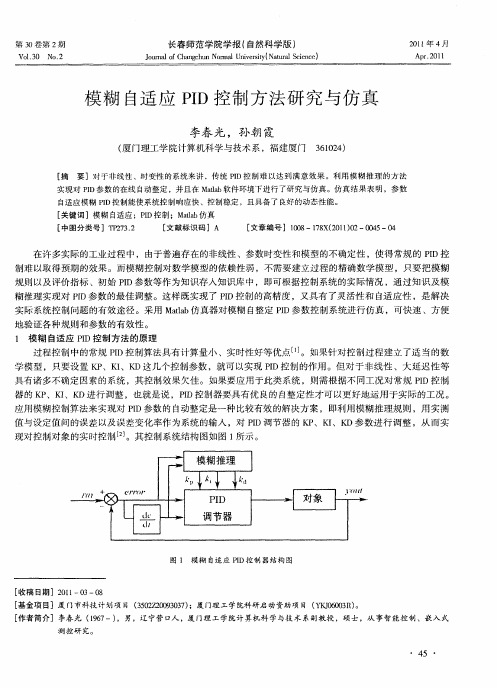
现对控 制对 象 的实时控 制 _ 。其控 制系统 结构 图如 图 1 2 J 所示 。
图 1 模 糊 自适 应 PD控 制 器 结 构 图 I
[ 关键词]模 糊 自适应 ;PD控制 ;Maa 仿 真 I tb l
[ 中图分类号]T 232 P7 .
[ 文献标识码 ]A
[ 文章编号]10 —18 (0 10 0 4 —0 0 8 7 X 2 1)2— 0 5 4
在 许 多实 际的工业 过程 中 ,由于普遍 存 在的非 线性 、参 数 时变性 和模型 的不确 定性 ,使 得 常规 的 PD控 I
Ap . 01 r2 1
模 糊 自适 应 PD控 制方 法 研究 与仿 真 I
李春 光 ,孙朝 霞
( 门理工学 院计算 机科学 与技 术系 ,福建厦 门 3 12 ) 厦 6 04
【 摘 要]对于非 线性 、时变性 的系统来讲 .传统 PD控制难 以达到 满意效果 。利用 模糊推 理的方 法 I
过 程 中 ,不 断检测 误差 e 与误 差变 化率 e,根据模糊 控制 策略对 K 、K 、K c P I D进行 在线 修正 ,从 而满 足不 同
模糊自整定PID控制器设计以及MATLAB仿真分析
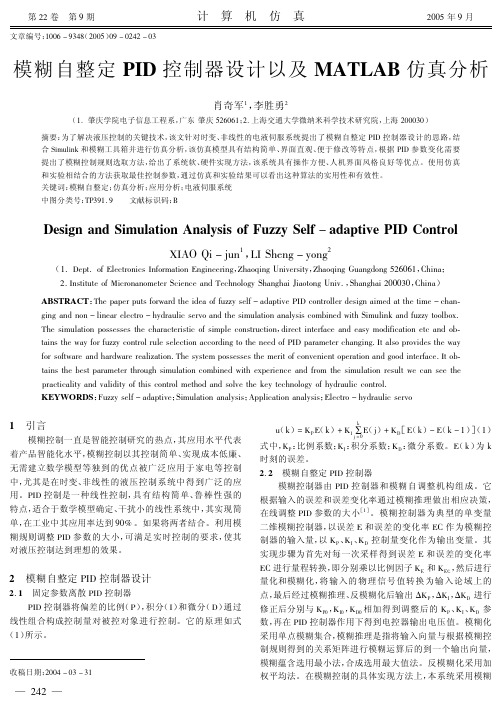
收稿日期:2004-03-31第22卷 第9期计 算 机 仿 真2005年9月文章编号:1006-9348(2005)09-0242-03模糊自整定PID 控制器设计以及MATLAB 仿真分析肖奇军1,李胜勇2(1.肇庆学院电子信息工程系,广东肇庆526061;2.上海交通大学微纳米科学技术研究院,上海200030)摘要:为了解决液压控制的关键技术,该文针对时变、非线性的电液伺服系统提出了模糊自整定PID 控制器设计的思路,结合Simuiink 和模糊工具箱并进行仿真分析,该仿真模型具有结构简单、界面直观、便于修改等特点,根据PID 参数变化需要提出了模糊控制规则选取方法,给出了系统软、硬件实现方法,该系统具有操作方便、人机界面风格良好等优点。
使用仿真和实验相结合的方法获取最佳控制参数,通过仿真和实验结果可以看出这种算法的实用性和有效性。
关键词:模糊自整定;仿真分析;应用分析;电液伺服系统中图分类号:TP391.9 文献标识码:B Design and Simulation Analysis of Fuzzy Self -adaptive PID ControlXIAO Oi -jun 1,LI Sheng -yong 2(1.Dept.of Eiectronics Information Engineering ,Zhaoging University ,Zhaoging Guangdong 526061,China ;2.Institute of Micronanometer Science and Technoiogy Shanghai Jiaotong Univ.,Shanghai 200030,China )ABSTRACT :The paper puts forward the idea of fuzzy seif -adaptive PID controiier design aimed at the time -chan-ging and non -iinear eiectro -hydrauiic servo and the simuiation anaiysis combined with Simuiink and fuzzy tooibox.The simuiation possesses the characteristic of simpie construction ,direct interface and easy modification etc and ob-tains the way for fuzzy controi ruie seiection according to the need of PID parameter changing.It aiso provides the way for software and hardware reaiization.The system possesses the merit of convenient operation and good interface.It ob-tains the best parameter through simuiation combined with experience and from the simuiation resuit we can see the practicaiity and vaiidity of this controi method and soive the key technoiogy of hydrauiic controi.KEYWORDS :Fuzzy seif -adaptive ;Simuiation anaiysis ;Appiication anaiysis ;Eiectro -hydrauiic servo1 引言模糊控制一直是智能控制研究的热点,其应用水平代表着产品智能化水平,模糊控制以其控制简单、实现成本低廉、无需建立数学模型等独到的优点被广泛应用于家电等控制中,尤其是在时变、非线性的液压控制系统中得到广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三模糊自适应整定PID控制仿真实验一、实验目的1.通过实验了解数字PID控制的原理2.通过实验实现离散系统的数字 PID 控制仿真3.通过实验了解模糊自适应整定PID控制的原理4.通过实验实现模糊自适应整定PID控制仿真5.通过实验进一步熟悉并掌握Matlab软件的使用方法二、实验内容1.针对给定离散系统的输入信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.若采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制该模糊自适应整定PID系统的Matlab仿真程序三、实验步骤1.针对给定离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器,编制相应的仿真程序。
2.确定模糊自整定PID的算法基础3.针对 kp, ki , kd 三个参数分别建立合适的模糊规则表4.画出PID参数的在线自校正工作程序流程图5.编制该模糊自适应整定PID系统的Matlab仿真程序四、实验要求1.设被控对象为:采样时间为1ms,采用Z变换进行离散化,经过Z变换后的离散化对象为:yout(k)=-den(2)yout(k-1)-den(3)yout(k-2)-den(4)yout(k-3)+num(2)u(k-1)+num(3)u(k-2)+num(4)u(k-3)针对离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器。
其中,S为信号选择变量,S=1时为阶跃跟踪,S=2时为方波跟踪,S=3时为正弦跟踪。
2.采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制炉温模糊控制系统的Matlab仿真程序五﹑自适应模糊控制的规则1﹑控制规则:2.模糊控制器设计确定为双输入,三输出结构确定每个变量的论域,其中每个变量都有一个模糊子集来表示。
这个模糊子集中有3个模糊子集,分别是:N ,Z ,P 在编辑界面中,确定好每一个语言变量的范围,以及隶属函数的类型。
如下图所示:输入模糊控制规则:六﹑仿真结果PID 控制器Kp 参数在控制过程中的变化曲线:Ki参数:Kd参数:七﹑实验程序(一)%Fuzzy Tunning PID ControlClear all;Close all;a=newfis('fuzzpid');a=addvar(a,'input','e',[-1 1]);a=addmf(a,'input','1','N','zmf',[-1,-1/3]);a=addmf(a,'input','1','Z','trimf',[-2/3,0,2/3]); a=addmf(a,'input','1','P','smf',[1/3,1]);a=addvar(a,'input','ec',[-1 1]);a=addmf(a,'input','2','N','zmf',[-1,-1/3]);a=addmf(a,'input','2','Z','trimf',[-2/3,0,2/3]); a=addmf(a,'input','2','P','smf',[1/3,1]);a=addvar(a,'output','kp',[-10 10]);a=addmf(a,'input','1','N','zmf',[-10,-3]);a=addmf(a,'input','1','Z','trimf',[-5,0,5]);a=addmf(a,'input','1','P','smf',[3,10]);a=addvar(a,'output','ki',[-3 3]);a=addmf(a,'output','2','N','zmf',[-3,-1]);a=addmf(a,'output','2','Z','trimf',[-2,0,2]);a=addmf(a,'output','2','P','smf',[1,3]);a=addvar(a,'output','kd',[-5 5]);a=addmf(a,'output','3','N','zmf',[-5,-1]);a=addmf(a,'output','3','Z','trimf',[-3,0,3]);a=addmf(a,'output','3','P','smf',[1,5]);Rulelist=[1 1 1 1 1 1 1;1 2 1 2 1 1 1;1 2 2 1 2 1 1;1 3 12 1 1 1;1 323 2 1 1;2 1 1 1 1 1 1;2 23 3 1 1 1;2 1 2 23 1 1;2 3 2 1 3 1 1;2 23 1 2 1 1;3 1 2 1 1 1 1;3 2 3 1 2 1 1;3 1 2 1 2 1 1;3 3 1 2 3 1 1;3 2 3 1 2 1 1];a=addrule(a,rulelist);a=setfis(a,'DefuzzMethod','centroid'); writefis(a,'fuzzy');a=readfis('fuzzpid');figure(1);Plotmf(a,'input',1);figure(2);Plotmf(a,'input',2);figure(3);Plotmf(a,'output',1);figure(4);Plotmf(a,'output',2);figure(5);Plotmf(a,'output',3);figure(6);Plotfis(a);fuzzy fuzzpid;showrule(a);ruleview fuzzpid;(二)%Fuzzy PID ControlClear all;Close all;Warning off;a=readfis('fuzzpid');t=0.001;sys=tf(122,[1,26,0]);dsys=c2d(sys,ts,'z');[num,den]=tfdata(dsys,'v');u-1=0;u-2=0;y-1=0;y=2=0;e-1=0;ec-1=0;ei=0;ed=0;kp0=0;ki0=0;kd0=0;for k=1:1:1000Time(k)=k*ts;r(k)=1;%Using fuzzy inference to tunning PIDk-pid=evalfis([e-1,ec_1],a);kp(k)=kp_0+k_pid(1);ki(k)=ki_0+k_pid(2);kd(k)=kd_0+k_pid(3);u(k)=kp(k)*e_1+ki(k)*ei+kd(k)*ed;y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;e(k)=r(k)-y(k);%%%%%%%%%%%%%%%%Return of parameters%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% u_2=u_1;u_1u(k)=0;y_2=y_1;y_12=y(2);ei=ei+e(k)*ts;ec(k)=e(k)-e_1;e_1=e(k);ec_1=ec(k);endfiure(1);plot(time,r,'r',time,y,'b:','linewidth',2);xlabel(time(s)');ylabel('r,y');legend('Ideal osition','Practical position');fiure(2);subplot(211);plot(time,kp,'r','linewidth',2);xlabel(time(s)');ylabel('kp');subplot(212);plot(time,ki,'r','linewidth',2);xlabel(time(s)');ylabel('ki');figure(3);plot(time,u,'r','linewidth',2);xlabel(time(s)');ylabel('control input');。