智能卫生间控制系统
基于单片机的智能家居控制系统设计

基于单片机的智能家居控制系统设计摘 要“智能家居控制系统”是以单片机为控制核心,通过红外遥控模块遥控单片机实现室温实时测量、时间日期显示、以及控制家庭用电器开关通断来实现家用电器自动控制的功能。
其中温度测量是通过DS18B20芯片实现,日期时间是通过DS1302实现,家用电器开关通断是通过继电器实现,各项数据通过LCD1602液晶显示屏显示。
该系统可以远程方便地控制家用电器的工作状况,既可以提升家居安全性、便利性、舒适性,又能实现环保节能的居住环境。
是未来家电控制发展的主要趋势。
本文首先针对课题背景设计了一套总体的系统框图与方案,然后根据系统框图将系统分为控制、红外、时钟、温度、继电器和显示六个模块。
分别针对后五个模块进行电路介绍、原理分析及软件设计,并用控制模块将这五个模块整理、整合到一个系统中成为最终的智能家居控制系统。
本课题借助Proteus软件进行电路仿真,Keil软件进行程序设计编译,使用STC-ISP软件将程序烧录至单片机中,最终成果是使用MX-51开发板,外加SRD-05VDC型号继电器实现的。
最终成果现象为开机后液晶显示屏上显示当前日期、时间、环境温度以及当前工作的继电器编号,遥控器按“1”、“2”、“3”键分别控制继电器1、2、3的通断,按奇数次为通电,按偶数次为断电,继电器之间工作独立。
关键词:STC89C52单片机;继电器;DS18B20;DS1302;红外模块;LCD1602AbstractThe kernel control of IHCS(Intelligent Home Control System) is STC89C52. It can’measure the current temperature, calculate Date and Time, control electrical componcomponents by using thedominating t he electricalswitching to realize long-distanceinfrared module controlling the STC89C52. Current temperature measuring is realize by DS18B20, while date and time displaying is realized by DS1302. Electrical components’ switching is decided by electromagnetic relay, when all of the informatcontrol ofand data i s d isplayed by LCD1602. The system may have a long-distanceelectrical components. It not only will improve the safety, convenience, comfort o living condition, but also can it save the energy to be an environmental friendly style. It is the main tendency of the future electricity control.It was firstly introduced in this essay that the IHCS block diagram and progra dividing the system into controlling module, infrared, timing, temperature,analyzing therelay a nd display module. And introducing the circuit,electromagnetictheory, designing the software of them except controlling module one by one. After controlling module connects this five modules into a system, then births the IHCS this essay, itproject background of the production and the concept and sense of IHCS. In the essay, it is simulated by Proteus, the program is designed by using Keil, but not the least is that it downloads the software by STC-ISP into MX-51developme board and debugs.current timeLCD1602 displays theThe final result isstarting up, thewhen it isrelays’date, time, e nvironment t emperature and the current working electromagneticnumber. The remote control button ’1’,’2’,’3’separately controlsrelay. When pushing o dd times, the electromagnetic number’1’,’2’,’3’electromagneticrelay breaks. Differentrelay connects, when pushing e ven times, the electromagneticelectromagnetic relays work separately.The key words:STC89C52 singlechip; Electromagnetic relay;DS18B20;DS1302;analyze module;LCD1602目 录第1章绪论 ...................................................................1.1 课题背景与意义 .........................................................1.2 智能家居控制系统的定义分析及应用价值 ...................................1.2.1 智能家居控制系统的定义及分析 .....................................1.2.2 应用价值的SWOT分析 .............................................1.3 本文的主要工作和内容 ...................................................1.3.1 本文主要工作归纳 .................................................1.3.2 本文内容分布 .....................................................第2章智能家居控制系统的总体设计 .............................................2.1系统的总体设计及系统框图 ...............................................2.2方案选择 ...............................................................2.2.1智能家居控制模块方案选择 ..........................................2.2.2红外模块方案选择 ..................................................2.2.3时钟模块方案选择 ..................................................2.2.4温度模块方案选择 ..................................................2.2.5电磁继电模块方案选择 ..............................................2.2.6显示模块方案选择 ..................................................2.3本章小结 ...............................................................第3章智能家居控制系统的硬件电路设计 .........................................3.1红外模块电路设计 .......................................................3.2时钟模块电路设计 .......................................................3.3温度模块电路设计 .......................................................3.4电磁继电模块电路设计 ...................................................3.5液晶模块电路设计 .......................................................3.6本章小结 ...............................................................第4章智能家居控制系统的软件设计 .............................................4.1系统整体设计思想及主程序流程图 .........................................4.2程序子模块说明 .........................................................4.2.1红外模块程序 ......................................................4.2.2DS1302时钟模块程序 ...............................................4.2.3DS18B20温度模块程序 ...............................................4.2.4LCD1602液晶模块程序 ..............................................4.3本章小结 ...............................................................第5章系统的方案实现与调试 ...................................................5.1程序编写与仿真 .........................................................5.1.1程序编写软件Keil ...................................................5.1.2仿真软件Proteus ..................................................5.1.3仿真结果 ..........................................................5.2程序下载 ...............................................................5.2.1程序下载软件 ......................................................5.2.2程序下载过程 ......................................................5.3 调试结果 ...............................................................结论 ..........................................................................错误!未定义书签。
基于物联网的智能卫生间管理系统设计

基于物联网的智能卫生间管理系统设计随着科技的不断发展,物联网技术的应用越来越广泛。
在日常生活中,智能卫生间的出现为我们提供了更加便利和舒适的使用体验。
那么,基于物联网的智能卫生间管理系统该如何设计呢?设计目标:1. 提供智能化的卫生间使用体验:卫生间系统应该能够为用户提供智能化的使用体验,包括自动感应开关门、自动洗手、自动冲洗马桶、自动调节温度等功能,让用户在使用卫生间时感到方便、舒适。
2. 实现卫生间设备的智能管理:系统应该能够对卫生间设备进行智能管理,包括监测设备的工作状况、实时统计设备的使用情况、提醒设备的维护保养等。
同时,系统还要具备报警功能,一旦设备出现故障或者异常情况,能够及时通知相关维修人员。
3. 提供数据分析和决策支持:系统应该能够对卫生间的使用数据进行收集和分析,包括用户量统计、设备使用频率统计、使用时间段分析等。
这些数据可以用于改进卫生间的设计和运营管理,进而提供更好的使用体验。
设计方案:1. 感应控制系统:为了提供智能化的卫生间使用体验,可以在卫生间的门、洗手台、马桶等位置安装感应器,实现自动感应开关门、自动洗手、自动冲洗马桶等功能。
这种方式不仅方便了用户的使用,还能有效降低交叉感染的风险。
2. 远程监控和维护系统:为了实现卫生间设备的智能管理,可以通过物联网技术实现对卫生间设备的远程监控和维护。
将设备与云平台连接,每个设备都有独立的感应器和摄像头,能够实时监测设备的工作状况和使用情况。
同时,系统还可以通过手机App远程控制设备的开关和调节,方便管理人员进行维护操作。
3. 数据分析和决策支持系统:为了提供数据分析和决策支持功能,可以在卫生间系统中添加数据采集模块和分析模块。
数据采集模块可以实时记录用户量、设备使用频率等数据,并将这些数据上传到云平台。
分析模块可以对这些数据进行统计和分析,生成各种报表和数据可视化图表。
这些报表和图表可以用于评估卫生间的运营状况,优化设备的安排和维护计划。
基于PLC控制的卫生间自动冲水系统
基于PLC控制的卫生间自动冲水系统摘要:随着智能家居的快速发展,自动化卫生间系统成为了我们日常生活中不可或缺的一部分。
本文采用基于PLC控制的卫生间自动冲水系统,实现了对卫生间的自动控制与智能化控制。
关键词:PLC控制,卫生间自动冲水系统,智能控制,自动化,传感器技术Abstract: With the rapid development of smart homes, automated bathroom systems have become an indispensable part of our daily lives. In this paper, a PLC-controlled bathroom automatic flushing system is used to achieve automatic control and intelligent control of the bathroom.Keywords: PLC control, bathroom automatic flushing system, intelligent control, automation, sensor technology1.引言随着生活节奏的加快,人们越来越重视家居环境对健康的影响。
卫生间因其特殊的环境和功能,成为家居环境中最易滋生细菌的场所之一。
为了避免细菌滋生给人类带来健康隐患,实现卫生间的清洁和卫生,在卫生间中使用自动化设备已经成为生活的一部分。
本文旨在介绍一种基于PLC控制的卫生间自动冲水系统,该系统采用传感器技术,实现对厕所和洗手盆的读取并控制冲水和水龙头的开关,提高卫生间的清洁度和卫生状况。
本文首先分析了卫生间自动化存在的问题,并提出了本系统的设计方案和实现方法,最后进行了实验验证和性能分析。
2.卫生间自动化存在的问题在传统卫生间中,人们需要手动操作水龙头和冲水按钮,且在使用过程中需要接触这些设备,容易造成病菌的传播。
客房智能控制系统硬件使用说明样本
客房智能控制系统使用阐明书03月27日目录第一章客房控制设备使用阐明错误!未定义书签。
1、客房灯光控制................................................................................................. 错误!未定义书签。
2、客房插座电源控制......................................................................................... 错误!未定义书签。
3、客房空调控制................................................................................................. 错误!未定义书签。
4、客房服务信息控制......................................................................................... 错误!未定义书签。
第二章客房管理软件使用阐明错误!未定义书签。
1、服务器系统及数据库建立 ............................................................................. 错误!未定义书签。
2、客房控制系统数据库导入环节: .................................................................... 错误!未定义书签。
3、客房管理软件使用阐明................................................................................. 错误!未定义书签。
基于物联网技术的智能户外公厕系统设计

总769期第三十五期2021年12月河南科技Henan Science and Technology基于物联网技术的智能户外公厕系统设计李红斌(苏州健雄职业技术学院,江苏太仓215411)摘要:为了强化公共卫生间的智能化与信息化管理,全面提升城市公共设施智能化和人性化服务水平,借助物联网、云计算平台等先进技术设计了智能户外公厕系统。
该系统硬件将厕所内各主要环节的智能化传感器设施及设备进行连接,智能模块设计了智能导厕、臭气监控、蹲位显示以及人流识别等功能。
它不仅能以更智能的方式实现公共卫生间管理,解决人们的“拉撒”问题,而且可为今后拓展商业及其他服务、大数据开发应用等奠定良好的基础。
关键词:智能;公厕系统;物联网中图分类号:TP212;TU242.9文献标识码:A文章编号:1003-5168(2021)35-0009-03 Design of Intelligent Public Toilet System Based on Internetof Things TechnologyLI Hongbin(Suzhou Chien-Shiung Institute of Technology,Taicang Jiangsu215411)Abstract:In order to improve the intelligent and informatized management of public toilets,and comprehensively im⁃prove the level of intelligent and humanized services of urban public facilities,with the help of advanced technologies such as the IoT technology and cloud computing platforms,the smart public toilet system has been designed.The main links in the toilet are connected through intelligent sensor facilities and equipment.Including functional mod⁃ules such as intelligent toilet guidance,odor monitoring,squatting position display,and people flow recognition, which not only realizes public toilet management in a smarter way,but also solves people’s decentness.It has laid a good foundation for the future expansion of business and other services,and the development and application of big data.Keywords:intelligence;public toilet system;Internet of Things随着城市建设的不断发展,信息化和智能化水平不断提升,公共服务设施迎来了智能化变革。
流动厕所

二、技术参数(每厕位计算)
技术参数(每厕位计算)
1.工作电压:AC220V或 DC24V
2.额定功率:≤8W 3.耗水量:≤200Kg/月 4.耗液量:≤1.5Kg/月 5.耗电量:≤0.度/24小时
用电方式:市电220V供电 蓄电池24V供电 太阳能供电
三、流动厕所功能原理
四、产品设施
产品设施
六、产品配置
产品配置
七、产品外观
厕所房体根据型号不同,使用包括优质彩钢复合板、优质铝塑板、 进口金属雕花板、优质陶瓷墙砖等各种新型优质建筑材料,具有 以下特点: 重量轻,便于移动 隔音、隔热 洁、集成化高、外墙颜色可选 占地面积小 美观、大方、整
流动厕所
一、流动厕所介绍
厕所控制系统利用发泡混合液产生的泡沫代替厕所冲水,由于液体膨胀后体积扩 大近1000倍,因此可以最大限度的节约水资源,用泡沫封堵便器的排污口,从而 阻止不良气味向厕间内的扩散,并且从视觉上看到的是白色的泡沫,不会看到令 人生厌的污物,同时泡沫有很强的润滑作用,粪便可以很顺畅的滑落到处理池内。 采用智能全自动控制系统,经光纤探头对泡沫液位进行监测,及时进行泡沫量补 给使泡沫液面保持固定位置。泡沫经过重锤或柔性封堵截留,节省发泡混合液的 用量,也可以回收洗手水用于系统内的循环利用,因此最大限度地节约水资源。
流动厕所
五、产品特点
1、利用泡沫自身的润滑作用污物不会粘厕壁,其自 重使其滑落到排污管网或收集箱中。只需定期添加适 量的水和发泡剂,节水可达85%以上: 2、泡沫覆盖厕盆,污物不易沾染便器,避免视觉污 染且阻隔不良气味,不招引蝇虫: 3、使用时全自动控制,使用安全便利: 4、卫生间排放物可排入排污管网,也可增设收集箱。 该技术类型可利用旧式洗手间改造,也可在独立房体 内安装:
智能卫生间的设计与实现
智能卫生间的设计与实现卫生间作为家居空间中的重要组成部分,不仅要满足基本的洗漱需求,更需要兼顾舒适性和便利性。
近年来,随着智能科技的不断发展,智能卫生间的设计和实现也逐渐成为了人们热议的话题。
智能卫生间的设计需要重点考虑以下几个方面:一、智能化的洗漱设备首先,智能卫生间的核心在于智能化的洗漱设备。
不同于传统的马桶和淋浴设备,智能卫生间需要加入更多高科技的元素。
例如,采用声光控制技术的马桶盖、智能洗手台、自动控制清洁剂喷洒的淋浴器等,都是现代智能卫生间的主流设计方向。
其次,智能卫生间的洗漱设备还应具备智能感知和语音交互等智能化功能。
例如,智能马桶可以自动检测并调节水温、水压、水位和座温等参数,而智能洗手台则可以通过语音控制来调节水流和温度等功能。
二、智能化的照明系统智能卫生间的照明系统也应采用智能化设计。
智能化的照明系统可以自动感知环境亮度和人体位置等信息,从而调节照明强度和色温,以保证在任何条件下都能提供舒适、自然的照明效果。
同时,智能化的照明系统还可以实现语音控制和远程控制等功能。
例如,配备智能化照明系统的卫生间可以通过连接智能手机,实现随时随地的照明控制和设备开关等操作。
三、智能化的环境控制系统除了洗漱设备和照明系统外,智能卫生间的环境控制系统也应具备智能化设计。
智能化的环境控制系统可以通过自动感知室内环境温度、湿度、气味等信息,并智能调节空气净化、空气加湿、通风排气等功能,以实现更加舒适、健康、安全的卫生间空间。
此外,智能卫生间还可以配备人体检测和报警设备等,以实现人体安全和应急救援等功能。
总结智能卫生间的设计和实现需要充分考虑多种功能需求和人体工程学设计原则,从而实现最优的用户体验和功能性。
除了上述所提及的智能化洗漱设备、照明系统和环境控制系统等功能外,智能卫生间还可以实现人脸识别和语音识别等技术,以提高用户便利性和安全性。
未来,随着人工智能和物联网等技术的不断进步,智能卫生间的设计和实现将会更加智能化、人性化和个性化。
客房智能控制系统功能及接线图

客房智能控制系统功能及接线客房智能控制系统功能实现描述」、LED门外显示牌功能1、LED五合一门外显示牌是由触摸式门铃、房号灯,请勿打扰、请即清理、请您稍候组成。
2、在客房空置状态下,门铃键背光不亮,此时门铃按键为失效状态。
3、客房插卡取电后,门铃显示亮起,门铃按动可发出声响。
4、请勿打扰与请即清理为互锁状态显示,即两个提示只能有一个出现在LED门外显示屏上。
5、在客人拔卡外出时,请即清理在拔卡前如果已经启动,则可以继续保持清理灯亮。
6、L ED门外显示屏上的请勿打扰、请即清理、请稍后受房间内开关控制启动与关闭。
7、插卡状态下,按动请您稍后开关,LED门外显示屏上的请您稍后以闪亮状态展示,闪亮的次数为10次,然后自动关闭。
8、入住提示、请勿打扰、请即清理在软件中也可以显示。
、酒店专用门铃功能1、客人进入房间插卡后,如房门处于未关闭状态超过25秒,此处取消不提示任何声音。
只要求客房中心能显示相关信息。
2、客人在卫生间内按动紧急呼救开关后提示声音可以在软件上显示并有提示三、门磁开关1、每间客房的房门及门框上安装一套门磁开关,并与客房内的微电脑主机相连接,用于实现系统软件远程对房门的实时动态监控,以及客房门发生不安全因素时进行报警提示。
2、通过门磁开关的开关状态,可实现客房出租后房门开启瞬间,廊灯自动亮起,延时时间 5 分钟。
3、衣柜灯门磁开关在客人打开柜门后自动亮起,如客人未关闭衣柜门10分钟后关闭。
四、多功能取电开关功能1、指定门锁卡取电:即能够开启门锁的卡均可以取电,具备限时断电和身份识别功能。
2、卡片按 4 级权限管理(管理卡、服务员卡、维修卡、客人卡),如果使用服务员卡、维修卡进入房间后插卡30 分钟不取出,客房中心软件提示报警。
4、拔卡后10秒之内,切断房间内受控电源。
六、紧急呼救、呼叫解除、请稍后开关功能1、按动紧急呼救开关,该信号将发将送至客房中心电脑,客房中心接到该通知后可马上进行派工服务。
卫生间智能控制系统
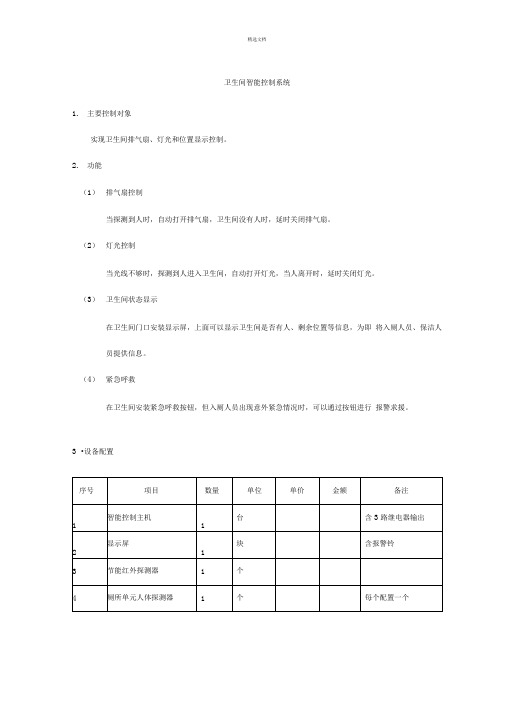
卫生间智能控制系统
1.主要控制对象
实现卫生间排气扇、灯光和位置显示控制。
2.功能
(1)排气扇控制
当探测到人时,自动打开排气扇,卫生间没有人时,延时关闭排气扇。
(2)灯光控制
当光线不够时,探测到人进入卫生间,自动打开灯光,当人离开时,延时关闭灯光。
(3)卫生间状态显示
在卫生间门口安装显示屏,上面可以显示卫生间是否有人、剩余位置等信息,为即将入厕人员、保洁人员提供信息。
(4)紧急呼救
在卫生间安装紧急呼救按钮,但入厕人员出现意外紧急情况时,可以通过按钮进行报警求援。
3 •设备配置。
KNX智能控制系统(20100928)
目录1智能控制系统 (2)1.1 系统概述 (2)1.2 需求分析 (2)1.3 设计原则 (2)1.4 设计要点 (3)1.5 系统设计 (4)1.5.1 KNX总线拓朴结构 (4)1.5.2 系统结构 (5)1.5.3 系统功能 (6)1.6 方案设计 (7)1.6.1 办公区域 (7)1.6.2 接待区域 (8)1.6.3 公共区域 (9)1.6.4 地下车库照明 (9)1.7 与第三方接口 (9)1.8 主要设备参数 (10)1.8.1 监控管理软件 (8)1.8.2 2、4、8、12路10A开关控制器 (9)1.8.3 2、4、8、12路16A开关控制器 (9)1.8.4 2、4、8、12路16A开关控制器带电流检测 (9)1.8.5 4路150W调光器 (10)1.8.6 2路300W调光器 (10)1.8.7 单路500W调光器 (113)1.8.8 单路1000W调光器 (11)1.8.9 窗帘控制模块 (12)1.8.10 触摸屏 (124)1.8.11 存在感应器带耦合器光感红外 (14)1.8.12 4路通用输入/输出接口 (14)1.8.13 智能面板带耦合器 (14)1.8.14 带LCD温控智能控制面板 (15)1.9 施耐德电气介绍(仅供参考,可以不纳入方案中) (15)1.9.1 施耐德电气集团简介 (15)1.9.2 施耐德电气ISC ECS (16)1智能控制系统1.1系统概述钰海环球金融中心项目设计一套智能控制系统,采用Schneider KNX全数字分布式控制系统,对区域内各类照明、空调、窗帘等电气设备进行自动化和集中控制管理,实现能源监测,不仅可有效管理楼宇的电气设备,提供灵活多变的使用功能和效果,还可以维护并延长灯具及电气设备的使用寿命,达到安全、节能、人性化、智能化的效果,并能在今后的使用中方便地根据用户的需求进行扩展。
1.2需求分析根据钰海环球金融中心项目使用要求,配置智能控制系统的功能分析如下:区域控制要求办公区域灯光场景控制、照度和红外动态控制电梯厅、走道灯光场景控制、时钟控制、照度和红外动态控制等公共区域会议室灯光场景控制、调光控制、智能会议控制地下车库灯光场景控制、时钟控制、照度控制1.3设计原则根据现行国家规范和项目技术文件的要求,我们在对钰海环球金融中心项目KNX智能控制系统的设计中遵循以下的原则:先进性:采用代表当今世界先进技术水平的成熟稳定的系统设备,并建立一个可扩展的平台,充分保护前期工程投资和后续扩展,使系统具有先进性。
基于智能控制的住宅卫生间照明与换气系统
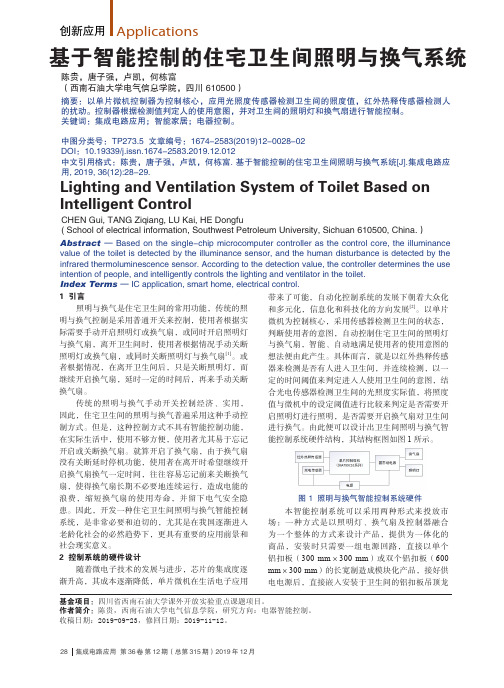
图 1 照明与换气智能控制系统硬件本智能控制系统可以采用两种形式来投放市场:一种方式是以照明灯、换气扇及控制器融合为一个整体的方式来设计产品,提供为一体化的商品,安装时只需要一组电源回路,直接以单个铝扣板(300 mm×300 mm)或双个铝扣板(300 mm)的长宽制造成模块化产品,接好供电电源后,直接嵌入安装于卫生间的铝扣板吊顶龙
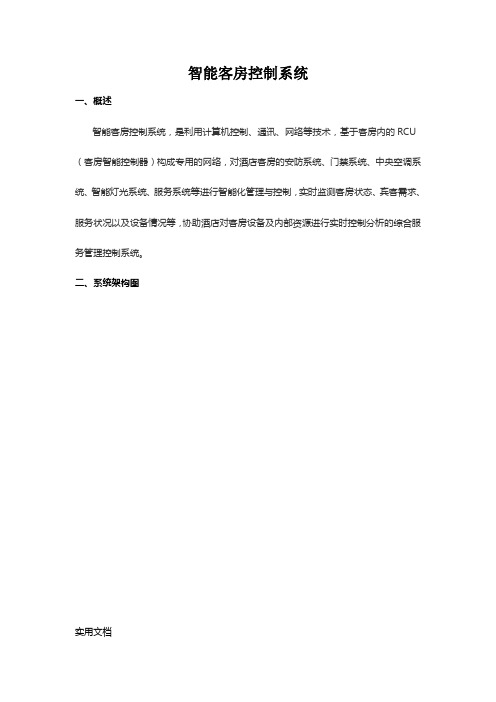
图 2 照明与换气智能控制程序流程
由图 2 可见,微机控制器首先检测红外热释放传感器的输出值,如果为高电平,则立即检测当前卫生间的照度值。
根据当前检测的照度值与当前微机中设定的照度阈值进行比较,根据比较的大小结果,有两条控制途径。
1)如果当前照度值等于或大于微机的设定照度阈值,则表明当前卫生间的照明条件要求满足,不需要开启照明灯,然后延时 10 s 再检测红外热释传感器的输入值,此时将出现两种可能:①
果输入值变为低电平,则表示使用者是短时进入卫。
智能客房控制系统
智能客房控制系统一、概述智能客房控制系统,是利用计算机控制、通讯、网络等技术,基于客房内的RCU (客房智能控制器)构成专用的网络,对酒店客房的安防系统、门禁系统、中央空调系统、智能灯光系统、服务系统等进行智能化管理与控制,实时监测客房状态、宾客需求、服务状况以及设备情况等,协助酒店对客房设备及内部资源进行实时控制分析的综合服务管理控制系统。
二、系统架构图实用文档三、系统功能描述3.1 灯光及电器的智能控制◆所有开关均为弱电自复位式开关,安全无辐射。
◆客人进入客房时,系统检测到房门开启,自动点亮房间内廊灯,让客人感觉智能与实用文档人性化。
廊灯延时30秒自动熄灭,点滴中节能。
◆当插卡(门锁卡)取电时,系统自动熄灭廊灯,并根据酒店方要求点亮房间内指定灯具,如点亮房灯或左右床灯半亮。
同时,在系统软件上(客户端)显示插卡人身份及姓名,如服务员王华、工程部李强或客人等。
名片、纸片等其它卡片不能取电。
◆当按下床头“总控”开关时,系统将关闭客房内所有灯具及排气扇,并进入睡眠模式。
◆在睡眠模式下,按任意开关,系统将自动点亮夜灯。
然后系统进入正常模式,各开关恢复对灯光及排气扇的正常控制。
◆床头的左、右床灯为调光控制。
(要求灯具为白炽灯)◆当客房内无人时,卫生间内排气扇将定时启动,以保证空气清新。
◆窗帘的自动控制,当客人白天进入房间时(8:00-17:00,时间可根椐需要设置)窗帘自动打开,当客人晚上进入房间,窗帘自动关闭,客人离开房间,任何时间窗帘均自动关闭,具体策略可根椐酒店要求定制。
◆客人拔卡离开房间,系统将延时关闭所有灯具、排气扇及受控插座电源。
客房内插座接入配电箱内,控制方式为两种,一种为24小时不断电插座(冰箱、电脑、充电、保险箱插座等);另一种为受控插座(电视、台灯、落地灯、卫生间插座等),电源接于交流接触器下口。
交流接触器受RCU控制。
3.2 服务功能的智能控制实用文档◆按下“请即清理”开关后,门口显示器上显示相应状态,并在系统软件上(客户端)弹出声音及信息提示。
最新卫生间自动控制系统设备及功能说明

最新卫生间自动控制系统设备及功能说明
简介
本文档旨在介绍最新的卫生间自动控制系统设备及其功能。
该系统采用先进的技术,以提供便捷和卫生的卫生间体验。
设备列表
以下是该卫生间自动控制系统的设备列表:
1. 自动感应水龙头:该水龙头可以自动感应用户的手,并自动开启和关闭水流,避免直接接触水龙头。
2. 自动感应洗手液器:该洗手液器可以自动感应用户的手,并自动释放适量的洗手液,帮助用户进行洗手。
3. 自动感应干手器:该干手器可以自动感应用户的手,并自动吹风,快速干燥用户的双手。
4. 自动感应马桶盖:该马桶盖可以自动感应用户的接近,并自动打开和关闭,方便用户使用卫生间。
5. 自动冲水系统:该冲水系统可以自动感应用户使用完毕后,
自动冲洗马桶,保持卫生。
功能说明
以下是该卫生间自动控制系统的功能说明:
1. 节水节能:自动感应水龙头、洗手液器和干手器均采用智能
节水技术,只在需要时才会启动水流或吹风,以节约水和能源资源。
2. 卫生便利:用户无需触摸水龙头、洗手液器、干手器和马桶盖,避免了交叉感染的风险,提高了卫生水平。
3. 舒适体验:自动感应马桶盖可以根据用户的接近自动打开和
关闭,无需手动操作,提供便捷的使用体验。
4. 智能管理:该系统配备智能管理控制面板,可监控设备工作
状态、周转时间和人流量,为维护人员提供数据支持和故障诊断。
结论
该卫生间自动控制系统设备提供了便捷、卫生和舒适的卫生间
体验。
其先进的技术和智能功能能够提高卫生水平、节约资源,并
为管理和维护人员提供数据支持。
欢迎大家体验并推广该系统,以提升卫生间的整体质量。
酒店客房智能控制系统
“现代化管理”——实现篇(四)
完备的历史记录查询功能
系统可保存所有客房的所有信息(包括 记录的详细信息)供管理人员查询。
完备的使用参数设置功能
在客房中心可根据实际需要对各个房间 的控制参数进行动态设置包括房间无人 关灯延时时间、卫生间无人关灯延时时 间、卫生间风扇延时时间等等。大大增 加了系统管理的便捷程度。
独有的灯检模块
系统在自动检测房间各路受控电器与灯 的状态,发现故障时立即通知客房中心, 并自动生成维修报告。变客人投诉为主 动维修,提高客房服务质量。
“现代化管理”——实现篇(五)
联网门锁
联网门锁是通过网络将酒店所有客房门锁联结在一起,实现所 有门锁的集中供电、开关门的控制和实时监控,门锁的每次开 关门和开门者的身份都实时传送到客房管理中心,客房管理中 心也可以对任一客房的门锁进行开关管理和状态监控,主要优 点如下: 1。增加了客房安全性 可实时监控客房门锁的状态(如门未锁 好、开门超时、非法勾开等),了解每个进入房间者的身份, 变事后查询为事前控制和防范,及时发现可疑进入者。 2。提高了可靠性 没有时钟差异和电池无电引起的开门故障。 3。降低了营运成本 不用更换电池和校对时钟,减少了电池费 用和维护费用。
一键式退房功能
当客人需要退房时,不需在楼道内呼叫服务员, 也不需在大厅内长时间的等待,只需通过系统 提供的退房功能即可完成。
“人性化”——实现篇(二)
就近分区控制,更加人性化
取消传统集中控制的床头柜操作面板,取而代之的是房间所有灯光、电器控制开 关均按分区控制的原则,就近设置于墙上,弱电方式的多点控制,安全舒适又符 合传统的居家习惯
楼层走廊灯的节能效果估算:
假设酒店有10个走廊,每层走廊为50组受控灯(壁灯或顶灯),每组灯平均功耗为25瓦。 使用本系统前,为了保证走廊的照明效果,往往是24小时常开。使用本控制系统后只有人 进入走廊后才亮人附近的几个灯,且每次亮灯时间只有几十秒钟左右,所以平均灯亮的时 间估算只有原亮灯时间的5%,其节能效益估算如下: 节约能耗开支=10层*50个灯*0.025KW*24小时*95%*1元/度=285元/日,每年节约开支: 365日*285元/日=104025元/年。
KNX智能化控制系统[2011年0928]
![KNX智能化控制系统[2011年0928]](https://img.taocdn.com/s3/m/5d1f9527227916888586d700.png)
目录1智能控制系统 (2)1.1 系统概述 (2)1.2 需求分析 (2)1.3 设计原则 (2)1.4 设计要点 (3)1.5 系统设计 (4)1.5.1 KNX总线拓朴结构 (4)1.5.2 系统结构 (5)1.5.3 系统功能 (6)1.6 方案设计 (7)1.6.1 办公区域 (7)1.6.2 接待区域 (8)1.6.3 公共区域 (9)1.6.4 地下车库照明 (9)1.7 与第三方接口 (9)1.8 主要设备参数 (10)1.8.1 监控管理软件 (8)1.8.2 2、4、8、12路10A开关控制器 (9)1.8.3 2、4、8、12路16A开关控制器 (9)1.8.4 2、4、8、12路16A开关控制器带电流检测 (9)1.8.5 4路150W调光器 (10)1.8.6 2路300W调光器 (10)1.8.7 单路500W调光器 (113)1.8.8 单路1000W调光器 (11)1.8.9 窗帘控制模块 (12)1.8.10 触摸屏 (124)1.8.11 存在感应器带耦合器光感红外 (14)1.8.12 4路通用输入/输出接口 (14)1.8.13 智能面板带耦合器 (14)1.8.14 带LCD温控智能控制面板 (15)1.9 施耐德电气介绍(仅供参考,可以不纳入方案中) (15)1.9.1 施耐德电气集团简介 (15)1.9.2 施耐德电气ISC ECS (16)1智能控制系统1.1系统概述钰海环球金融中心项目设计一套智能控制系统,采用Schneider KNX全数字分布式控制系统,对区域内各类照明、空调、窗帘等电气设备进行自动化和集中控制管理,实现能源监测,不仅可有效管理楼宇的电气设备,提供灵活多变的使用功能和效果,还可以维护并延长灯具及电气设备的使用寿命,达到安全、节能、人性化、智能化的效果,并能在今后的使用中方便地根据用户的需求进行扩展。
1.2需求分析根据钰海环球金融中心项目使用要求,配置智能控制系统的功能分析如下:区域控制要求办公区域灯光场景控制、照度和红外动态控制电梯厅、走道灯光场景控制、时钟控制、照度和红外动态控制等公共区域会议室灯光场景控制、调光控制、智能会议控制地下车库灯光场景控制、时钟控制、照度控制1.3设计原则根据现行国家规范和项目技术文件的要求,我们在对钰海环球金融中心项目KNX智能控制系统的设计中遵循以下的原则:先进性:采用代表当今世界先进技术水平的成熟稳定的系统设备,并建立一个可扩展的平台,充分保护前期工程投资和后续扩展,使系统具有先进性。
某五星级酒店客房智能控制系统图
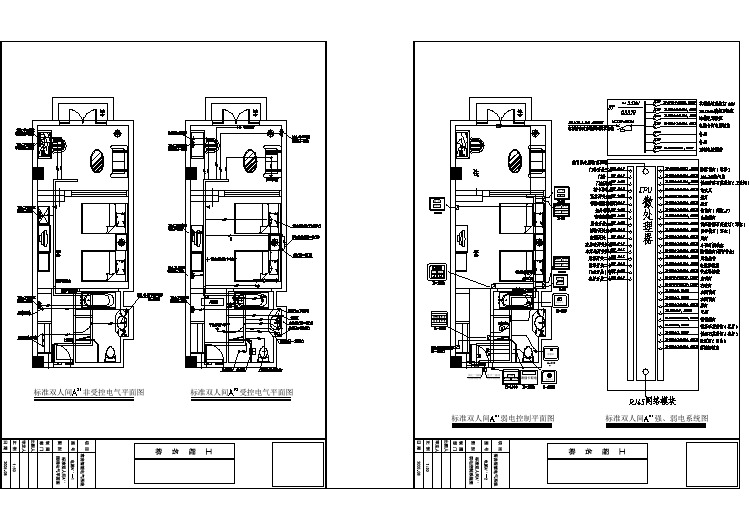
客房智能控制系统使用说明
客房智能控制系统使用说明书2007年03月27日目录第一章客房控制设备使用说明31、客房灯光控制 (3)2、客房插座电源控制 (3)3、客房空调控制 (3)4、客房服务信息控制 (4)第二章客房管理软件使用说明41、服务器系统及数据库建立 (5)2、客房控制系统数据库导入步骤: (5)3、客房管理软件使用说明 (7)4、网络控制器参数设置及使用说明 (21)第三章常见电子元器件参数及维修211、常用主要的元器件 (21)2、AIO CHJR板主要元器件的作用 (22)3、AIO CHMAN主要元器件的作用 (23)4、16PKZ板主要元器件的作用 (25)5、常见故障及排除方法: (27)6、网络硬件常见故障 (31)第四章附图331、接线端子表 (33)2、网络拓朴图 (33)3、系统示意图 (33)4、控制原理图 (33)5、开关接线图 (33)第一章客房控制设备使用说明1、客房灯光控制廊灯:由门磁开关和墙面开关双点控制。
打开房门,不论白天或夜间,廊灯均自动点亮;如不插入有效房卡,且不关房门,则廊灯一直亮;如不插入有效房卡,而关闭房门,则廊灯延时2分钟关闭;如插入有效房卡,且关闭房门,则廊灯一直亮,客人可按动廊灯开关关闭或打开廊灯。
卫生间灯光:由卫生间红外开关与墙面开关双点控制①卫生间灯:插入有效房卡后,系统从待机模式转入工作模式,按卫生间灯开关,可以打开或关闭卫生间灯;按动总开关,可关闭已经打开的卫生间灯;当红外线感应到卫生间无人时,延时15分钟关闭卫生间灯。
②防雾灯与排风扇:插入有效房卡后,系统从待机模式转入工作模式,按动排风扇与防雾灯开关,可以打开或关闭排风扇与防雾灯;当卫生间红外线感应到有人进入卫生间时,打开排气扇与防雾灯;按动总开关,可关闭已经打开的排风扇与防雾灯;当红外线感应到卫生间无人时,延时15分钟关闭排气扇与防雾灯。
左、右床灯:可控硅对左右床灯(仅限白炽灯)无级调光。
点按左、右床灯开关,左右床灯亮100%亮度,再次点按左、右床灯开关,左右床灯关闭;按住左、右床灯开关,左、右床灯从关闭逐渐至100%亮度,再按住左、右床灯开关,左、右床灯灯光亮度减少,直至关闭;持续按住左、右床灯开关调光过程中,松开左、右床灯调光开关,则左、右床灯停在当前亮度;按动总开关,可关闭已经打开的左、右床灯。
基于PLC的智能式全自动公厕设计

如 果 是 收费 公 厕 可 采 用 投 币式 开 启 , 币 投 入 的硬 币孔 中 , 硬
时 , 发 出信 号 , 止 一 切活 动 并 报警 显示 传 感 器失 灵 。 A1 停
2 智 能式 全 自动 公 厕 控 制 流 程
手 的 接 触 而 造 成 不卫 生 。 据最 新 的节 水 技 术 , 根 本文 设 计 了基 于
泡 沫 在 使 用 过 程 中要 不 断 被 稀 释 和 流 失 , 以要 不 断 补 充 , 所 补充开关 根据感知泡沫液位高低 的特殊泡沫传感 器来控制 , 选 定 的光 电传 感 器 接 近开 关 输 出信 号 都 是 标 准 的 电压 信 号 ,可 以 直 接 被 P C 检 测 , 用 可 靠 方便 。冲洗 的管 路 控 制如 图 1 示 。 L 使 所
目前 , 共 卫 生 间 便 池 多 采 用 传 统 的手 按 式 和水 箱 式 冲 洗 , 公 照 明 普 遍 采 用 手 动 开 关 ,经 常 会 因 忘 记 冲 水 或 打 扫 不 及 时 而 造 成环境污 染 , 用 起来既不方便 又不卫生 , 不利 于节水节 电 , 使 也 更 重 要 的 是 还 需 要人 工 管 理 。 明和 冲水 均 需 人 力 开 关 , 会 因 照 还
排明J 气灯J, 扇 ~次 J 束 、 二 , 手 照 结
I
— — —
按钮 门打 Fra bibliotek: 一次
出 ,定 时 2 s 打 开 1. 0后 03进
邵鸿翔 周 武强 ( 洛阳理工学院, 河南 洛阳 4 12 ) 70 3
摘 要
为 了更 好 地 改 善 现 有 公 共 卫 生 间的 使 用 状 况 , 立 高可 靠 性 的节 水 、 能 、 碳 、 洁 的 公 厕 。 设 计 了基 于 西 门子 S — 建 节 低 清 7
智能卫生间策划书3篇
智能卫生间策划书3篇篇一《智能卫生间策划书》一、项目背景随着科技的不断发展,人们对生活品质的要求越来越高。
卫生间作为家庭生活中的重要空间,也需要与时俱进,实现智能化升级。
智能卫生间不仅能提供更加便捷、舒适的使用体验,还能提升家居的整体智能化水平。
二、项目目标打造一个集智能化、舒适化、个性化于一体的卫生间,满足用户对高品质生活的需求。
三、智能功能设计1. 智能马桶:具备自动冲洗、烘干、加热座圈等功能,提供舒适的如厕体验。
2. 智能照明系统:根据不同场景自动调节灯光亮度和颜色,营造舒适氛围。
3. 智能镜子:显示时间、天气、新闻等信息,同时具备防雾功能。
4. 智能淋浴系统:可调节水温、水流,提供个性化的沐浴体验。
5. 智能通风系统:自动换气,保持卫生间空气清新。
6. 智能门锁:支持密码、指纹等开锁方式,保障隐私安全。
四、空间布局与设计1. 合理规划卫生间空间,确保各功能区域布局合理,使用方便。
2. 采用简洁、现代的设计风格,搭配高品质的材料和装饰,提升整体美观度。
3. 设计足够的收纳空间,方便存放洗漱用品等杂物。
五、设备选型与采购1. 选择知名品牌、质量可靠的智能设备,确保性能稳定。
六、施工与安装1. 聘请专业的施工团队,确保施工质量和进度。
2. 严格按照设备安装要求进行安装,确保智能系统正常运行。
七、售后服务1. 提供设备的售后维修、保养服务,确保用户无后顾之忧。
2. 定期回访用户,收集反馈意见,不断优化智能卫生间的功能和体验。
八、项目预算详细列出智能设备采购、施工安装、材料费用等各项预算,确保项目在预算范围内顺利进行。
九、项目推广1. 通过线上线下渠道进行宣传推广,提高智能卫生间的知名度和影响力。
2. 举办体验活动,让用户亲身感受智能卫生间的优势。
十、项目时间表制定详细的项目时间表,明确各个阶段的工作任务和时间节点,确保项目按时完成。
篇二《智能卫生间策划书》一、项目背景随着科技的不断发展,人们对生活品质的要求越来越高,卫生间作为日常生活中重要的空间,也需要不断升级和智能化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
合肥学院第七届电子设计竞赛报告作品名称:智能卫生间控制系统学校全称:合肥学院系别班级:电子系08级队员姓名:电子(2)班张浩忠0805070208电子(2)班王笑康0805070182电子(3)班韩冰0805070229智能卫生间控制系统(2011年A题)摘要本智能卫生间控制系统采用AVR系列8位单片机ATMEGA16作为主控制器,通过对门上红外对管信号的采集,完成对有无人的智能判断;利用独立开关和红外信号相结合的方式,实现了对洗手和冲厕水泵手动或自动双重控制的功能;根据对电位器两端电压信号的采集和判断,确定洗手水泵的工作时间;同时,采用蜂鸣器和发光二极管,对紧急情况进行声光报警。
另外,在人性化设计方面,增加了自动烘手功能;在节水设计方面,通过检测入厕状态的不同来控制冲厕水量的大小;在节能设计方面,将电磁铁与自锁开关相结合,在短时间内让电磁铁闭合并松开来控制照明系统的工作状态,从而实现低功耗的目的。
关键词:智能卫生间 ATMEGA16 红外检测节水低功耗1引言我国在《2000年小康型城乡住宅科技产业工程项目实施方案》中,将建筑智能化小康示范小区列入国家的发展方向。
建设部要求到2012年,我国大中城市中60%的住宅要实现智能家居。
目前,举国上下正掀起智能小区和智能住宅的建筑热潮。
智能化已渐入人心,住宅智能化给家居生活带来了许多便利。
在家居中,卫生间是一个不可或缺的重要空间。
卫生间与人的关系极为密切,智能技术的引入将使住宅卫生间更显人性化。
本次设计完成的智能卫生间控制系统满足如下要求:1.基本要求①该系统能够自动识别房间有人和无人,并且根据有人和无人的情况,分别让不同的设备开启或关闭。
②房间有人时:a)红外检测有人时,“有人指示灯”亮,并点亮照明系统。
b)冲厕开关与GND短接时,冲厕水泵开启3秒断开;两次冲厕时间间隔10秒。
c)洗手开关与GND短接时,洗手水泵开启3--7秒断开;两次洗手时间间隔7秒。
d)内风机转,全功率工作。
③房间无人状态下:a)红外检测无人时,“无人指示灯”亮,照明系统不工作。
b)内风机转,半功率工作。
④用一个可调电阻,来调节洗手时间(0-4秒)。
⑤报警开关与GND短接时,蜂鸣器响。
2.发挥部分:①如果在有人时,没有按下冲厕开关,当人离开后,进行自动冲厕。
②可添加一个拨码开关,用于控制是否可以重复洗手。
能实现自动冲水洗手③其他。
2方案设计2.1设计思路本系统是采集外部不同输入信号来控制系统的输出工作方式,对硬件和软件都有严格要求,在硬件部分,负责红外检测驱动电路和继电器或电磁铁驱动电路设计。
在软件部分,负责采集开关或红外输入信号,经过计算以及判断,进而控制继电器或电磁铁来实现对外部设备的控制。
系统总体结构图见附录1所示。
本次设计的重点在于硬件驱动电路和软件的编程。
2.2方案比较与选择2.2.1 系统控制器方案选择方案一:采用51系列8位单片机AT89S52为控制器,利用其采集外部信号数据输入,通过控制A/D转换器ACD0809采集电位器两端电压来确定洗手时间,利用控制继电器来选择不同的电压,进而让内风机在不同功率下工作。
方案二:以AVR系列8位单片机ATMEGA16为主控制器,利用其自带的10位、A/D转换器来采集电压,利用其片内输出比较模式(CTC)分别产生占空比0%的PWM波和占空比50%的PWM波来控制内风机的工作模式。
通过上述的分析中可以看出,利用AT89S52单片机需要使用外部A/D转换器,增加了系统硬件的复杂性,而ATMEGA16单片机片内集成A/D装换器,硬件简单,同时ATMEGA16单片机具有PWM波生产功能,利用其可以很好的控制内风机的工作。
鉴于此,我们选择方案二。
2.2.2 人体感应传感器选择方案一:采用热释电传感器,采用此传感器构成的人体感应模块在人进入其感应范围时输出高电平,当人离开感应范围后则自动延时关闭高电平,输出低电平,根据电平的高低来进行有无人的判断。
方案二:采用红外对管传感器,将此传感器安置在门上,当人在其检测范围时,输出高电平,反之则立即输出低电平,控制器根据电平的高低来进行有无人的判断。
方案一和方案二有一个明显的区别,就是当人离开感应范围后,方案一有段延时时间,而方案二却没有,显然延时的时间就增加了系统控制的稳定性,所以我们选择方案二。
2.2.3 内风机驱动电路选择方案一:采用电机驱动芯片L298,其内部含有双路H桥功率驱动电路。
如下图所示图1 H桥功率驱动电路若IN1端口为PWM波控制端,ENA置常高、IN2为常低,则可控制一路单向直流电机。
方案二:根据开关电源原理,采用大功率场效应管,配合相关驱动电路以实现PWM波的功率输出。
方案一中BJT为电流控制电流型的有源器件,集电极工作电压在饱和与截止间跳变时,有功率损失。
只利用一路H桥驱动电路,则资源利用率低。
方案二中场效应管为电压控制电流型器件,则功率损失低。
由以上分析我们选择方案二。
2.3硬件电路设计本系统总体硬件电路实现见附录2,各部分模块设计如下。
2.3.1检测电路设计系统信号检测电路分为有无人检测电路、洗手检测电路、入厕检测电路和干手检测电路。
采用红外对管收发方式,配合其驱动电路来触发单片机I/O口,从而判断相关信号。
具体电路设计如下图所示图2 检测电路当无检测状态产生时,比较器正向输入端电位大于阈值电压,比较器输出高电平;当检测状态产生时,红外接收管接收到反射回来的红外光,其等效内阻变小,比较器正向输入端电位小于阈值电压,输出低电平。
其中有无人检测电路采用高电平触发方式。
2.3.2 各模块驱动电路设计1)短时工作驱动电路洗手水泵驱动电路、入厕水泵驱动电路和热风干手器驱动电路属于系统短时工作驱动电路,采用继电器驱动方式,具体电路图如下图所示。
图3 短时工作驱动电路当控制端置低电平时,PNP管导通则继电器闭合,电机工作。
2)长时工作驱动电路照明系统控制电路属于系统长时工作电路,由电磁铁翕动自锁开关来控制照明系统,具体电路图如下图所示。
图4 长时工作驱动电路由于电磁铁工作在12V,而控制器工作在5V,采用光电耦合器实现了电平转换。
3)内风机驱动电路内风机工作于两种状态,即全功率状态和半功率状态,由AVR单片机产生PWM波并控制其占空比来实现。
具体电路图,如下图所示图5 内风机驱动电路图中将NPN型三极管S9013作为推动级来驱动大功率N沟道场效应管IRF840,控制其通断。
S9013的发射极—基极饱和电压为5V,与单片机工作电压相匹配,从而实现了电平转换。
4)报警电路设计采用有源蜂鸣器作为系统的报警声源,以低电平触发的方式设计如下电路。
图6 报警电路2.3.3电源模块设计本系统工作于DC12V、5V和AC220V,实测系统全功率工作状态下消耗电流为2.8A(除交流外),则系统选择双通道额定输出电压为DC12V和5V,额定输出电流为3A的开关电源。
在水泵电机启动时,瞬态电流比较大,所以控制器的供电电源要与其隔离开来。
采用5V稳压芯片LM7805设计的电源提供单片机、显示器、红外对管检测电路和报警电路。
2.4 系统软件设计本系统采用AVR系列单片机ATMEGA16为主控制器,在其编译环境下利用C 语言编写程序,首先根据有无人将程序分成两个模块,在有人模块中,点亮有人指示灯和照明系统,并且让内风机全功率工作,然后检测不同的输入信号并实现相应的功能;在无人模块中,点亮无人指示灯,关闭照明系统,并且让内风机半功率工作,并且判断是否需要进行自动冲厕。
另外,在软件中将每一部分的工作状态在LCD128*64中显示,便于软件调试和实现良好的人性化界面。
系统总体流程图如下所示:NN图7 系统软件总体流程图3理论分析与计算1)红外对管检测电路查得红外发射管的正常工作电流I为10mA~30mA,两端压降U。
为1.4V,若取限流电阻R为200Ω,则其工作电流为I=(U-U。
)/R=18mA经测得,接收管等效内阻R为2MΩ,则选取分压电阻为1MΩ。
2)短时工作驱动电路经测得,继电器内阻为150Ω,工作电压为5V,则其工作电流为33.3mA.BJT S9013 发射极工作电流为150mA,可满足设计要求。
3)长时工作驱动电路经测得,电磁铁工作电压为12V,瞬时工作电流为 1.2A,则可选取大功率BJT管TIP127,其集电极额定工作电流为4A。
在一次入厕间所消耗的功耗为Q=UI*t=16.9J4)内风机驱动电路经测得,当内风机工作时场效应管的分得压降为3V。
在全功率工作时,其工作电流为0.13A,则其消耗功率为P=UI=1.17W。
若其工作在半功率时,其消耗功率由以下公式可得(占空比σ)P=UI*σ=0.59W4设计实现4.1自动冲厕节水算法:本智能卫生间控制系统可以根据入厕状态的不同,在没有按下冲厕开关,当人离开后,能够实现对冲厕水量的自动判断,从而实现节约用水的功能。
当检测到入厕的红外输入信号后,开始计时,直到红外输入信号消失后,停止计时,然后根据入厕时间的值,判断入厕状态,并且设定于不同状态时对应的冲厕水量,在人离开卫生间后,进行自动冲厕。
算法流程图如下所示:图8 自动冲厕节水算法流程图4.2 低功耗照明控制开关照明灯处于长时间工作状态时,继电器处于闭合状态,这样继电器消耗大量功耗。
设计电磁铁控制的自锁开关来控制照明系统时,只需要0.5S的通断时间。
这样在整个入厕过程中,电磁铁只工作了1S,无效功耗损失大幅降低。
5 系统测试5.1测试条件和测试仪器设备对系统功耗、PWM波、红外对管进行测试,测试仪器设备如下表1所示。
5.2测试方法和结果(1)系统使用开关电源供电,+12V及+5V,热风干手器和照明灯使用220V 交流供电,用数字万用表电流档分别测试开关电源电流端口电流,系统最大功耗计算如下:P总 = P+5 + P+12 + P lamp + P HAHDP = U * IPmin = P12864 + P Ventilator(2)测试ATMEGA16产生PWM波占空比,如下表:由表350%时为半功率,完全满足题目要求。
(3)红外对管测试:为适应不同环境的监测要求,调节接收管灵敏度,测试结果如上表4所示,实现卫生间能的智能控制。
6 结论经过四天三夜的努力,我们最终完成了对智能卫生间控制系统的设计。
综合测试证明,本系统完成了所有赛题任务。
另外,在系统扩展部分,我们从人性化、节水、节能方面考虑,实现了自动烘手功能,控制冲厕水量大小以及照明系统低功耗控制的目的。
通过本次电子设计竞赛,我们明白了团队协作的重要性。
大家只有齐心协力,才能在更短的时间内完成更好的作品。
从中我们深刻体会到坚持不懈、大胆尝试对实验成功的重要性,这为我们以后的学习坚定了信念。
参考文献[1]赵建领.51系列单片机开发宝典.北京:电子工业出版社,2007年.[2]田晓梅,王月姣.嵌入式C语言在工程编程中的应用技巧[J].中南民族大学学报:自然科学版,2005.1.[3]余锡存,曹国华.单片机原理及接口技术[M].北京:机械工业出版社,2007年12月.[4]康华光.电子技术基础(模拟部分).北京:高等教育出版社,2009年7月.[5]常健生.检测与转换技术.北京:机械工业出版社,2010年8月.10附录1:系统总体结构框图ATMEGA16独立开关红外信号电压信号洗手冲厕报警有人洗手入厕烘手可调电阻电磁铁/开关照明灯继电器水泵热风干手器PWM 波内风机附录2: 系统总体硬件电路附录3:系统实物图附录4:程序部分源代码void main(){init(); //系统工作初始化while(1){/************** 卫生间有人系统工作模式********************/ if(flag_body == HAVEBODY){delay_12864(500);if(flag_body == HAVEBODY){PORTB &= ~BIT(2); //有人指示红灯亮PORTA |= BIT(1); //无人指示绿灯灭lcd_displayString(1,0,"有人灯亮");PORTB &= ~BIT(7); //照明灯亮delay_12864(500);PORTB |= BIT(7);lcd_displayString(2,0,"照明灯亮..");TCCR0 = 0X2B;OCR0 = 62; //内风机转,全功率工作。