伺服基本原理及伺服选型计算教材
伺服电机的选型和计算
电机的选择:(1)电机扭矩的计算 负载扭矩是由于驱动系统的摩擦力和切削力所引起的可用下式表达: FL M =π2式中 M-----电动机轴转距;F------使机械部件沿直线方向移动所需的力;L------电动机转一圈(2πrad )时,机械移动的距离2πM 是电动机以扭矩M 转一圈时电动机所作的功,而FL 是以F 力机械移动L 距离时所需的机械功。
实际机床上,由于存在传动效率和摩擦系数因素,滚珠丝杠克服外部载荷P 做等速运动所需力矩,应按下式计算:z z M h h F M B spSPao P K 211122⎪⎪⎭⎫ ⎝⎛++=ηππ M 1-----等速运动时的驱动力矩(N.mm)π2hF spao K---双螺母滚珠丝杠的预紧力矩(N.mm) Fao------预紧力(N),通常预紧力取最大轴向工作载荷Fm ax的1/3,即F ao =31F m ax当F m ax 难于计算时,可采用F ao =(0.1~0.12))(N C a ; C a -----滚珠丝杠副的额定载荷,产品样本中可查:hsp-----丝杠导程(mm);K--------滚珠丝杠预紧力矩系数,取0.1~0.2;P---------加在丝杠轴向的外部载荷(N),W F P μ+=; F---------作用于丝杠轴向的切削力(N); W--------法向载荷(N),P W W 11+=;W 1-----移动部件重力(N),包括最大承载重力;P 1-------有夹板夹持时(如主轴箱)的夹板夹持力;μ --------导轨摩擦系数,粘贴聚四氟乙烯板的滑动导轨副09.0=μ,有润滑条件时,05.0~03.0=μ,直线滚动导轨004.0~003.0=μ;η1-------滚珠丝杠的效率,取0.90~0.95;MB----支撑轴承的摩擦力矩,即叫启动力矩(N.m),可以从滚珠丝杠专用轴承样本中得到,见表2-6(这里注意,双支撑轴承有M B 之和的问题)z 1--------齿轮1的齿数 z2--------齿轮2的齿数最后按满足下式的条件选择伺服电机M M s ≤1Ms-----伺服电机的额定转距(2)惯量匹配计算 为使伺服进给系统的进给执行部件具有快速相应能力,必须选用加速能力大的电动机,亦即能够快速响应的电机(如采用大惯量伺服电机),但又不能盲目追求大惯量,否则由于不能从分发挥其加速能力,会不经济的。
伺服电机功率计算选型
连续工作速度 < 电机额定转速
7
举例计算1
已知:圆盘质量M=50kg,圆盘直径 D=500mm,圆盘最高转速60rpm, 请选择伺服电机及减速机。
8
举例计算1
计算圆盘转动惯量 JL = MD2/ 8 = 50 * 2500 / 8 = 15625 kg.cm2 假设减速机减速比1:R,则折算到伺服电机轴上 负载惯量为15625 / R2。
高速度时间200ms,忽略各传送带轮重量,驱动这
样的负载最少需要多大功率电机?
11
举例计算2
1. 计算折算到电机轴上的负载惯量 JL = M * D2 / 4 / R12 = 50 * 144 / 4 / 100 = 18 kg.cm2 按照负载惯量 < 3倍电机转子惯量JM的原则 JM > 6 kg.cm2
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9 = 10.903 N.m 加速所需总转矩TA = TA1 + TA2 = 12.672 N.m
16
举例计算3
3. 计算电机驱动负载所需要的扭矩 另一种计算所需加速扭矩的方法: TA= 2π* N * (JW + JB) / (60 * t1) / η
14
举例计算3
1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2 = 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8 = 40 * 25 / 8 = 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2 2. 计算电机转速 电机所需转速 N = V / PB = 30 / 0.02 = 1500 rpm
伺服驱动器原理及选型
伺服的构成要素
目标值 发生装置 伺服电 伺服电机 检出器 输出 机械 速度/ 速度/位置
伺服驱动 伺服驱动
回路( 反馈回路(半闭式)
全闭位置环 位置环
3
1.1.1伺服的外观结构和铭牌 伺服的外观结构和铭 伺服的外观结构和
YASKAWA
Quality and Beauty
4
1.2 伺服的构成
YASKAWA
Quality and Beauty
电源部 商用电 商用电源 逆变部
电机 整流部
指令信号
控制部 反馈
电流演算部 回転角度情報
编码器 编码器
5
1.2.1 控制部的构成
位置环 位置环 速度环 速度环 电流环 位置指令
+ 位置 控制部 + -
位置 反馈 速度 反馈
YASKAWA
Quality and Beauty
9
1.2.5 積分動作(I動作)
x
X
YASKAWA
Quality and Beauty
X Ki Yi=Ki·∫Xdt Yi=Ki· Xdt
Yi
T=0 y Yi T=0
t
t
偏差变 作越困难 ·偏差变小、负荷动作越困难 偏差微量存在, 个量就称为残留偏差(偏移)。 偏差微量存在,这个量就称为残留偏差(偏移)。 即使是小偏差,也可以积累成大的操作量。直到偏差成为 ·即使是小偏差,也可以积累成大的操作量。直到偏差成为0, 荷才可以运作。 负荷才可以运作。
YASKAWA
Quality and Beauty
で回転する。
ε
速度指令の 大きさ
20
2 用户参数
YASKAWA
Quality and Beauty
伺服电机选型计算实例

伺服电机选型计算实例伺服电机是一种控制器控制的电机,具有高精度和高速度的特点,广泛应用于机械设备中。
在选型伺服电机时,需要考虑多个参数来满足具体的应用要求。
下面以一个选型计算实例来详细介绍伺服电机的选型过程。
假设我们需要选型一台伺服电机用于驱动一个线传动机构,具体要求如下:1.最大负载力为2000N,工作速度范围为0-10m/s。
2. 线传动机构的负载惯量为500kg·m²。
3. 需要保证驱动精度在±0.2mm范围内。
4.工作环境温度范围为0-40℃。
首先,我们需要计算所需的转矩。
根据公式:转矩=负载力×工作半径,其中工作半径等于线传动机构的负载惯量÷2、由于我们没有具体的线传动机构参数,假设负载惯量为500kg·m²,即工作半径为0.25m。
则最大转矩=2000N×0.25m=500N·m。
考虑到一般情况下,峰值转矩为最大转矩的2倍,即1000N·m。
接下来,我们需要计算伺服电机的速度要求。
根据给定的工作速度范围0-10m/s,我们可以选择合适的额定转速。
假设我们选择的额定转速为2000rpm,则转速范围为0-2000rpm。
考虑到加速度和减速度的要求,一般额定转速的选择会略高于平均线速度,假设为2200rpm。
接下来,我们需要选择合适的伺服电机型号。
在选型之前,我们还需要考虑工作环境的温度范围。
根据给定的工作环境温度范围为0-40℃,我们需要选择具备合适温度范围的伺服电机。
一般伺服电机的温度范围为0-50℃,因此我们可以选择标准型号的伺服电机。
在选择伺服电机型号时,我们需要参考厂家提供的电机性能参数。
主要包括额定转矩、额定转速、额定电压、额定电流、额定功率等。
根据我们的要求,我们可以对比不同型号的伺服电机并选择合适的型号。
最后,我们需要根据具体应用需求考虑伺服电机的控制方式、接口类型以及其他附件等。
伺服电机的选型计算办法

伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。
《伺服电机的选型》课件

考虑工作环境的温度、湿度、尘埃等条件,选择能够 在恶劣环境下稳定运行的伺服电机。
规格匹配
电机尺寸
根据安装空间和实际需求,选择合适的电机 尺寸。
电机重量
对于需要轻量化的应用,应考虑电机的重量 。
接口兼容性
确保所选伺服电机与控制系统和驱动器之间 的接口兼容。
技术评估
技术规格比较
对比不同品牌和型号伺服电机的技术规格,评 估其性能优劣。
可能是由于散热不良、负载过大或润 滑不足,应加强散热、减轻负载或增 加润滑。
运行噪音
可能是轴承损坏、螺丝松动或电气问 题,应更换轴承、紧固螺丝或检查电 气线路。
振动过大
可能是机械不平衡、安装不正确或负 载不均,应重新平衡机械、纠正安装 或调整负载分布。
无法启动
可能是电源故障、控制信号问题或机 械卡阻,应检查电源、控制信号或消 除机械障碍。
产品测试报告
查看第三方测试报告或制造商提供的产品测试 数据,了解电机的实际性能表现。
客户评价
参考其他客户的评价和使用经验,了解电机的可靠性和售后服务。
价格比较
成本效益分析
综合考虑电机的性能、品牌、技术支持等因素,评估其性价比。
报价与谈判
向供应商询价,了解价格优惠和谈判空间,争取获得更好的采购条 件。
THANKS FOR WATCHING
感谢您的观看
防护等级与环境适应性:分析各品牌伺服 电机的防水、防尘等防护等级,以及在各 种恶劣环境下的稳定运行能力。
应用案例分享
案例1
数控机床:介绍品牌A的伺服电机 在数控机床中的应用案例,突出 其在高精度加工和高效生产方面 的优势。
案例2
包装机械:分享品牌B的伺服电机 在包装机械中的成功应用案例, 强调其在提高包装效率和降低成 本方面的作用。
伺服基本原理及伺服选型计算
遵命!!主人
伺服裝置
2
伺服系统之架构
回授[檢出部]
AC伺服簡介
指令部 控制值 驅動器 驅動值 馬 達
伺服机构系统,大致上可分為下例几项:
1.指令部:动作指命信号的输出装置 2.控制部:接收控制指令,并驱动马达的装置 3.驱动、检出部:驱动控制对象、并检出状态
的装置 3
轉矩
機械負載
※缺点:
1. 无法作高动态加减速 2. 低转速, 控速难平稳 3. 小容量机种,效率差。 4 . 停电时,无法动态剎车。
※适用场合: 1. 控速变化较不激烈的產 业 2. 大容量驱动功率需求。
6
AC伺服簡介
DC 直 流 形 伺 服 马 达
※特长优点: 1.伺服驱动器构造简单。 2.停电时可发电剎车。 3.体积小、价格低。 4.效率佳。 ※缺点: 1.整流子週边需定期保养。 2.碳刷磨耗產生(碳粉),无法
F
r
θ
r sin 作用線
rF sin F(r sin ) 力量力臂
11
3) 力矩的單位:S.I. 制中的單位為 牛頓‧公尺(N‧m)
4) 力矩的方向與符號:繞固定軸轉動的物體,力矩可使物體 產生逆時鐘方向,或順時鐘方向的轉動。因此力矩為一維 向量。力矩符號規則一般選取如下:
推力F (N)
2π F=T ·——
PB
经过减速机后的推力F=T ·2—π— ·R PB
F
T PB
F
T 1/R PB
16
惯量计算
一、负载旋转时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
1/R L(m)
实心圆柱
D(m)
伺服驱动器原理及选型

伺服驱动器原理及选型
伺服驱动器的原理是通过不断与编码器进行反馈,使电机转动到预定
位置,然后根据控制器的信号对其进行调节,以保持稳定的位置或速度。
在控制过程中,伺服驱动器根据编码器的反馈信号来调整输出电流,使电
机按照预定的速度和位置运行。
1.功率要求:根据实际应用的需求确定所需的功率范围。
功率通常以
瓦特(W)或千瓦(KW)为单位表示。
2.控制方式:选择与控制器兼容的控制方式,如模拟控制、数字控制
或通信控制等。
不同的控制方式对应不同的接口标准和协议。
3.控制精度:根据实际应用的需求确定所需的控制精度。
通常以角度、速度或位置差异度量。
4.响应速度:根据实际应用需求确定伺服驱动器的响应速度。
高速应
用需要快速的响应速度,而低速应用则可以选择较慢的响应速度。
5.保护功能:考虑选择具有过载和过热保护功能的伺服驱动器,以保
护电机和驱动器免受损坏。
6.型号和规格:根据实际应用需求选择适当的产品型号和规格。
不同
的厂家和型号有不同的特点和规格,可以根据需求选择合适的产品。
7.成本:最后要考虑价格因素。
根据预算确定合理的价格范围,选择
性价比高的伺服驱动器。
总之,伺服驱动器是实现伺服电机运动控制的关键部件。
在选型时,
需要考虑功率要求、控制方式、控制精度、响应速度、保护功能、型号和
规格以及成本等因素。
根据应用需求选择合适的伺服驱动器可以确保系统的稳定性和性能。
伺服电机功率计算选型课件

案例三:搬运机械臂的伺服电机应用
总结词
大负载、高精度定位
详细描述
搬运机械臂需要承受较大负载并实现高精度定位,伺服电机能够提供足够的扭 矩和精确的控制能力,确保机械臂的稳定运行和精确操作。
伺服电机维护与保
05
养
伺服电机的日常维护
01
02
03
每日检查
检查伺服电机是否有异常 声音、振动或发热,检查 电缆和连接是否松动或破 损。
清洁
定期清除电机上的灰尘和 杂物,保持电机清洁,以 防止灰尘和杂物对电机运 行造成影响。
油脂涂抹
根据需要,在电机的轴承 和齿轮上涂抹适量的润滑 油脂,以减少磨损和摩擦 。
伺服电机的定期保养
定期更换润滑油
根据电机制造商的推荐, 定期更换电机的润滑油, 以保证电机正常运行。
检查绝缘电阻
定期检查电机的绝缘电阻 ,以确保电机电气性能正 常。
伺服电机的工作原理
伺服电机通过将输入的电压或电流信 号转换成转矩或转速,驱动负载进行 转动。
伺服电机内部通常包含一个旋转的转 子,以及一个固定的定子,通过电磁 感应原理实现能量的转换和传递。
伺服电机的分类与特点
根据使用的电源类型,伺服电 机可以分为直流伺服电机和交
流伺服电机两大类。
直流伺服电机具有精度高、 调速范围广、低速稳定性好 等优点,但需要定期更换电
案例一:数控机床的伺服电机应用
总结词
高精度、高效率
详细描述
数控机床需要高精度和高效率的加工能力,伺服电机能够提供稳定的扭矩和转速,确保加工过程的精确性和高效 性。
案例二:包装机械的伺服电机应用
总结词
快速响应、高可靠性
详细描述
包装机械需要快速响应和高可靠性的运行能力,伺服电机能够迅速启动和停止,适应各种包装工艺需 求,确保生产线的稳定性和效率。
伺服基本原理与伺服选型计算
电机转矩T (N.m) 小轮1质量M1(kg) 小轮1半径r1(m) 小轮2质量M2(kg) 小轮2半径r2(m) 重物质量M3(kg) 减速比r1/r2=1/R
JL=1/2*M1*r12 + (1/2*M2*r22)/R2 + M3*r12
JL=1/2*M1*r12 + 1/2*M2*r12 + M3*r12
※缺点: 1. 无法作高动态加减速 2. 低转速, 控速难平稳 3. 小容量机种,效率差。 4 . 停电时,无法动态剎车。
※适用场合: 1. 控速变化较不激烈的產 业
2. 大容量驱动功率需求。
6
AC伺服簡介
DC 直 流 形 伺 服 马 达
※特长优点: 1.伺服驱动器构造简单。 2.停电时可发电剎车。 3.体积小、价格低。 4.效率佳。 ※缺点: 1.整流子週边需定期保养。 2.碳刷磨耗產生(碳粉),无法
i
則上面導出的轉動方程式可寫成
I
13
此方程式為绕固定轴转动的刚体所必须遵守的基本力学方程 式,类似於移动力学中的牛顿第二运动定律。合外力对应到 合外力矩,质量对应到转动惯量,加速度对应到角加速度。
F ; a ; M I
转动惯量在转动力学中的角色就像质量在移动力学中所扮演 的角色,即转动惯量越大的刚体角速度越不容易產生变化。 刚体的转动惯量与其转轴的位置与质量的分布有关。刚体的 质量如呈连续的分布,则转动惯量必须以积分计算。
正號:逆時鐘方向。
負號:順時鐘方向。
2. 轉動方程式:考慮一繞固定軸轉動的
剛體(如右圖)。距離轉軸為 r 處的一 質量為 m 的質點,受到一力量 F 的作 用,根據切線方向的牛頓第二運動定律
伺服电机选型计算

伺服电机选型计算引言伺服电机是一种能够精确控制转速、位置和加速度的电机,广泛应用于工业自动化领域。
为了正确选型伺服电机,需要综合考虑多个因素,如负载特性、所需转动速度、加速度和减速度等。
本文将介绍伺服电机的选型计算方法。
1. 伺服电机基本参数在选型计算之前,首先需要了解伺服电机的基本参数,这些参数对于计算非常重要。
常见的基本参数包括:•额定转矩:伺服电机能够连续输出的最大转矩。
•额定转速:伺服电机在额定负载下能够达到的最高转速。
•道数:伺服电机的反馈器件信号周期数量,通常是脉冲或电压。
•分辨率:伺服电机的转子位置检测精度,通常以脉冲数表示。
2. 负载特性分析选型伺服电机的第一步是分析负载特性。
负载特性包括负载转矩和转动惯量。
可以通过以下公式计算负载转矩:负载转矩 = 工作负载 × 工作半径其中,工作负载是指应用中所需的转矩,工作半径是转轴到工作力点的距离。
转动惯量是指负载物体抵抗转动的惯性,可以通过以下公式计算:转动惯量 = 负载质量 × 负载半径²负载质量是指负载物体的质量,负载半径是转轴到负载质心的距离。
3. 加速度计算在伺服电机选型中,需要考虑加速度和减速度,以确保电机能够在规定的时间内达到所需速度。
加速度的计算公式如下:加速度 = (目标速度 - 初始速度) / 时间其中,目标速度是所需达到的最终速度,初始速度是实际启动时的初始速度。
4. 选型计算有了上述参数和计算公式,可以开始具体的选型计算。
选型计算主要包括以下步骤:1.确定工作负载和工作半径。
2.计算负载转矩和转动惯量。
3.确定加速度和减速度的要求。
4.根据负载转矩和转动惯量,选择能够满足要求的伺服电机。
5.检查是否满足速度要求,如果不满足,可以考虑调整加速度和减速度参数。
在具体计算中,还需要考虑一些额外因素,如安全系数、附加负载等。
结论伺服电机选型计算是一项重要且复杂的任务,需要综合考虑多个因素。
通过合理的选型计算,可以确保伺服电机能够满足工作需求,并提供稳定和可靠的运行。
伺服系统课件

伺服系统课件伺服系统课件伺服系统是一种广泛应用于各种机械设备中的控制系统,它具有高精度、高可靠性和高响应速度等特点。
在现代工业中,伺服系统被广泛应用于机床、机器人、自动化生产线等领域。
为了更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
一、伺服系统的基本原理伺服系统的基本原理是通过对输出信号和反馈信号进行比较,控制执行机构的运动,使其达到预定的位置、速度或力矩。
伺服系统通常由控制器、执行机构和反馈装置组成。
控制器负责接收输入信号,并根据反馈信号进行控制算法的计算,然后输出控制信号给执行机构。
执行机构根据控制信号的变化来调整自身的运动状态。
反馈装置负责采集执行机构的运动信息,并将其反馈给控制器,以便控制器进行调整。
二、伺服系统的应用领域伺服系统在各个领域都有广泛的应用。
在机床领域,伺服系统可以实现高精度的切削加工,提高加工质量和效率。
在机器人领域,伺服系统可以实现机器人的精确定位和运动控制,使机器人能够完成各种复杂的任务。
在自动化生产线领域,伺服系统可以实现产品的高速运输和精确定位,提高生产效率和质量。
三、伺服系统的优势和挑战伺服系统相比于传统的开环控制系统具有许多优势。
首先,伺服系统具有高精度和高可靠性,可以实现对输出位置、速度和力矩的精确控制。
其次,伺服系统具有高响应速度,可以快速调整执行机构的运动状态,适应快速变化的工作环境。
此外,伺服系统还具有较低的能耗和噪音,能够提供更加舒适和安静的工作环境。
然而,伺服系统也面临一些挑战。
首先,伺服系统的设计和调试较为复杂,需要专业的知识和技能。
其次,伺服系统的成本较高,对于一些小型企业和个人来说,可能难以承受。
此外,伺服系统对环境的要求较高,对温度、湿度和电磁干扰等因素都有一定的限制。
四、伺服系统课件的设计和应用为了帮助学生更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
伺服驱动器原理及选型
伺服驱动器原理及选型伺服驱动器(Servo Drive)是一种用于控制伺服电机运动的电子设备,它可以控制电机的速度、位置和扭矩。
伺服驱动器通常由电源模块、控制模块和功率模块组成。
控制模块接收指令信号,通过功率模块将电源信号转换为适合电机控制的信号,从而控制电机的运动。
伺服驱动器的工作原理基本上可以分为三个步骤:采样、比较和输出。
首先,伺服驱动器会不断采样电机的位置、速度和扭矩信息,以反馈给控制模块。
然后,控制模块会将采样的信息与设定值进行比较,计算出与设定值的误差,并生成相应的控制信号。
最后,控制信号经过功率模块的放大和变换,输出到电机,控制电机的运动。
1.功率:伺服驱动器的功率应根据电机的额定功率来选择,通常应选择与电机额定功率相匹配的伺服驱动器,以确保驱动器能够正常控制电机的运动。
2.控制方式:伺服驱动器的控制方式可以分为位置控制、速度控制和扭矩控制。
根据具体应用的需求,选择合适的控制方式。
3.通讯接口:现代伺服驱动器通常提供多种通讯接口,如RS485、CAN总线、以太网等,以便与上位机或其他设备进行通讯。
根据具体的控制系统要求,选择适合的通讯接口。
4.控制精度:伺服驱动器的控制精度是指驱动器可以实现的最小位置或速度变化,通常以“脉冲当量”来表示,即每个脉冲对应的移动距离或速度增量。
根据应用的需求,选择具有足够控制精度的伺服驱动器。
5.功能扩展:一些高级伺服驱动器还具有一些功能扩展,如过载保护、编码器反馈、故障诊断等。
根据具体的应用需求,选择带有所需功能扩展的伺服驱动器。
6.可靠性和稳定性:伺服驱动器作为控制电机的核心设备,其可靠性和稳定性对于系统的运行至关重要。
选择具有高可靠性和稳定性的品牌和型号的伺服驱动器,以确保系统的正常运行。
总之,选择适合的伺服驱动器需要综合考虑电机的功率、控制方式、通讯接口、控制精度、功能扩展以及可靠性和稳定性等因素,以满足具体应用的需求。
伺服电机功率计算选型

某机床制造商需要为其数控机床选型伺服电机系统,通过选型软件对比了多个方案后,选择了一款高性能且价格 适中的伺服电机产品。在实际应用中,该伺服电机系统表现稳定可靠,满足了机床的高精度加工需求。
06
总结回顾与展望未来发展趋势
本次课程重点内容回顾
伺服电机基本概念和工作原理
详细解释了伺服电机的定义、分类、结构以及工作原理,使学员对伺服电机有了全面的 认识。
操作步骤演示和使用技巧分享
在选择产品时,注意核对产品的性能 参数是否符合实际需求。
在对比方案时,建议关注性价比、交 货期等综合因素。
实际案例操作演示
案例一
某自动化设备制造商需要为其生产线上的机器人选型伺服电机,通过选型软件输入相关参数后,软件自动计算出 所需电机的功率和转速范围。制造商根据计算结果从数据库中选择了一款合适的伺服电机产品,并成功应用于机 器人中,提高了生产线的运行效率。
机械制造行业应用案例
01
数控机床
在数控机床中,伺服电机用于驱动主轴和进给轴,实现高精度、高效率
的加工。根据机床的加工需求和负载特性,可以选择不同功率和扭矩的
伺服电机。
02
工业机器人
工业机器人需要实现多关节、多维度的运动控制,对伺服电机的动态响
应和精度要求较高。根据机器人的负载、速度和加速度等参数,可以选
的控制算法。
避免误区和常见问题解答
不要只看功率大小而忽视其他性能参数,要综合考虑电 机的各项性能指标。
在选型时要考虑预留一定的余量,以应对负载波动和未 知因素。
注意电机的热设计和散热条件,避免过热影响性能和寿 命。
了解电机的维护和保养要求,确保电机的长期稳定运行 。
04
实例分析:针对不同行业应用进 行选型案例分析
伺服驱动器原理及应用培训教材(PPT47页)

动态制动是如何发生的?
第一种情况: 双继电器版本的EDB伺服驱动 器的动态制动电路使用一个继电器 造成电机绕组短路,从而使电机紧 急停机。当用在大功率伺服上时这 种方法不是很安全。
伺服驱动器原理及应用培训教材(PP T47页)
伺服驱动器原理及应用培训教材(PP T47页)
五、动态制动
动态制动是如何发生的?
第三种情况: 2kW以上的EDB伺服驱动器的 动态制动电路通过一个可控硅代替 继电器动作,这是与1.5kW以下的 伺服驱动器唯一不同的地方。电机 转子能量也是消耗在动态制动电阻 上。这种方法也使电机平滑的减速。
伺服驱动器原理及应用培训教材(PP T47页)
伺服驱动器原理及应用培训教材(PP T47页)
四、主回路
主电容充电
在主电容充电中,我们看到一个它保护这个电路并 且限制上电时主电容C1的充电电流。
伺服驱动器原理及应用培训教材(PP T47页)
伺服驱动器原理及应用培训教材(PP T47页)
四、主回路
P-N电压
在DB1上的P-N电压是供电电 压的有效值,即右图中P点的电压读 数是310V。 V(RMS) = 220V * 1.41 = 310V
伺服驱动器原理及应用培训教材(PP T47页)
一、电流环 二、速度环 三、位置环 四、主回路 五、动态制动 六、再生 七、伺服选型
伺服驱动器原理及应用培训教材(PP T47页)
伺服驱动器原理及应用培训教材(PP T47页)
一、电流环
功能图
伺服驱动器原理及应用培训教材(PP T47页)
伺服驱动器原理及应用培训教材(PP T47页)
五、动态制动
动态制动何时发生?
Servo Off:动态制动打开以保证安全。 Servo On:动态制动关闭。 伺服驱动器进入Servo Off状态,当: 1)S-ON输入信号关闭; 2)超程; 3)伺服报警发生; 4)主电源关闭。 当以上事件发生时,我们能够通过设定参数Pn004指定电机如何停机。
伺服电机选型计算及案例(傻瓜式)讲课讲稿
统的决定
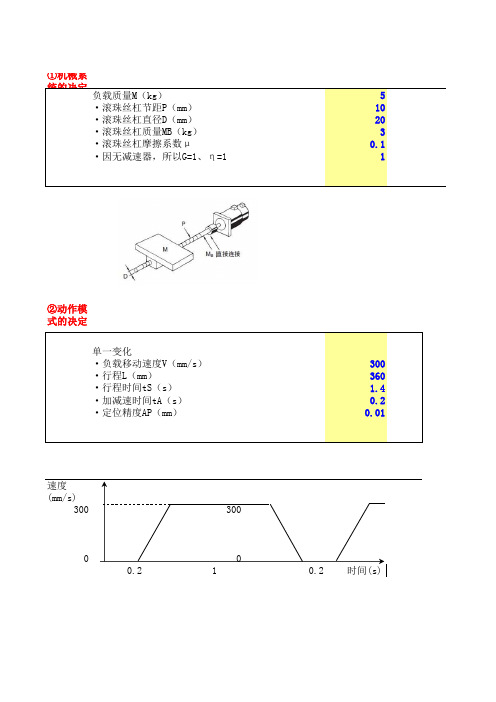
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
#REF!
N.m
0.1726 N.m
1800 r/min 1000 (脉冲/转)
﹤[电 机的额 定转矩 ﹤[电 机的瞬 时最大 转矩 ≦[电 机的额 定转数 U系列 的编码
初步 选择 定 R88M U200 30(J m=
1.23E-05
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
0.5096 > 7.8E-03
0.165 N.m
0.1726 N.m 0.0078 N.m -0.1570 N.m #REF! N.m
⑨讨论 负载惯量JL
有效转矩Trms 瞬时最大转矩T1 必要的最大转数N 编码器分辨率R=P.G/AP.S
1.63E-04 kg.m2
≦[电 机的转 子惯量 JM
速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
举例计算2
3. 计算电机所需要转速 N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10 = 796 rpm
17
举例计算3
M
已知:负载重量M=200kg,螺杆螺距PB=20mm,螺杆直径DB=50mm, 螺杆重量MB=40kg,摩擦系数µ=0.2,机械效率η=0.9,负载移动速度 V=30m/min,全程移动时间t=1.4s,加减速时间t1=t3=0.2s,静止时间 t4=0.3s。请选择满足负载需求的最小功率伺服电机。
14
举例计算2
M
1:R2
D
1:R1
已知:负载重量M=50kg,同步带轮直 径D=120mm,减速比R1=10,R2=2, 负载与机台摩擦系数µ=0.6,负载最高 运动速度30m/min,负载从静止加速到 最高速度时间200ms,忽略各传送带轮 重量,驱动这样的负载最少需要多大功 率电机?
15
举例计算2
伺服选型计算
物理概念及公式
1
§ 力矩與轉動方程式
1. 力矩:
1) 力矩的意義:使物體轉動狀態產生變化的因素,即當物體 受到不為零的外力矩作用,原為靜止的將開始轉動,原來 已在轉動的,轉速將產生改變。
2) 力矩的定義:考慮開門的情況,如右 圖,欲讓門產生轉動,必須施一外力 F 。施力點離轉軸愈遠愈容易使門轉 動。而外力平形於門面的分力對門的 轉動並無效果,只有垂直於門面的分 力能讓門轉動。綜合以上因素,定義 力矩,以符號 τ表示。
27
速度响应频宽比较
28
伺服的精度指标
• 伺服马达编码器高的优势:
• 1:可以使用在更高的精度要求场合; • 2:马达运行噪音更低; • 3:速度控制越平稳,特别是低速特性更佳;
29
各厂牌编码器分辨率比较
汇川伺服编码器分辨率不提高,很难跟国 产拉开差距
30
• 各厂牌市场表现
31
核心竞争对手—国外品牌—安川
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10 = 0.882 N.m 加速时所需转矩Ta = M * a * (D / 2) / R2 / R1 = 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10 = 0.375 N.m 伺服电机额定转矩 > Tf ,最大扭矩 > Tf + Ta
i miri2 i 1, 2, 3,L , n 對每一質點作加總即得到
i ( miri2 )
i
i
m l l F
mF
左邊的合力矩只需考慮外力所產生的力矩,由內力所產生 的力矩將會兩兩互相抵消,如右上圖所示。
括號中的量稱為剛體的轉動慣量,以符號 I 表示
I miri2
i
則上面導出的轉動方程式可寫成
22
决定伺服电机大小的因素
✓传动方式 ✓负载重量 ✓皮带轮/滚珠丝杆等传动件重量 ✓减速比 ✓皮带轮直径/滚珠丝杆螺距 ✓加减速特性 ✓运行速度 ✓摩擦系数 ✓机械效率 23
一個好的伺服效能要具備
高均一性、適應性
當整個機構來回作動時, 面對時變的磨擦力及工件的更換, 保持一致的性能是很重要的. 每一次的速度變化曲線是否一致 每一次的位置變化曲線是否一致
M3 M1 r1
r2 M2
10
伺服选型原则
• 连续工作扭矩 < 伺服电机额定扭矩 • 瞬时最大扭矩 < 伺服电机最大扭矩 (加速时) • 负载惯量 < 3倍电机转子惯量 • 连续工作速度 < 电机额定转速
11
举例计算1
已知:圆盘质量M=50kg,圆盘直径 D=500mm,圆盘最高转速60rpm, 请选择伺服电机及减速机。
負號:順時鐘方向。
2. 轉動方程式:考慮一繞固定軸轉動的ቤተ መጻሕፍቲ ባይዱ
剛體(如右圖)。距離轉軸為 r 處的一 質量為 m 的質點,受到一力量 F 的作 用,根據切線方向的牛頓第二運動定律
Ft mat rFt r mat mr2
3
Ft F
rm 轉軸
將剛體看成是由許多質點所構成,則每一質點都滿足類似 的方程式
经过减速机之后的转动惯量
JL=
JK R²
8
惯量计算
二、负载直线运动时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
直线运动部分
JK=M
×(
PB 2π
)²
经过减速机之后的转动惯量
JL=
JK R²
M
1/R PB
9
惯量计算
三、皮带类传动时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
18
举例计算3
1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2 = 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8 = 40 * 25 / 8 = 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2 2. 计算电机转速 电机所需转速 N = V / PB = 30 / 0.02 = 1500 rpm
如果选择1200W电机,JM = 8.28kg.cm2,则 15625 / R2 < 3*8.28,R2 > 637,R > 25 输出转速=3000/25=120 rpm,满足要求。 这种传动方式阻力很小,忽略扭矩计算。
13
举例计算1
这种传动方式与前一种传动方式相同, 选型时主要考虑负载惯量的计算,计 算公式也与前面相同。 总结:转动型负载主要考虑惯量计算。
I
4
此方程式為繞固定軸轉動的剛體所必須遵守的基本力學方程 式,類似於移動力學中的牛頓第二運動定律。合外力對應到 合外力矩,質量對應到轉動慣量,加速度對應到角加速度。
F ; a ; M I
轉動慣量在轉動力學中的角色就像質量在移動力學中所扮演 的角色,即轉動慣量越大的剛體角速度越不容易產生變化。 剛體的轉動慣量與其轉軸的位置與質量的分布有關。剛體的 質量如呈連續的分布,則轉動慣量必須以積分計算。
电机转矩T (N.m) 小轮1质量M1(kg) 小轮1半径r1(m) 小轮2质量M2(kg) 小轮2半径r2(m) 重物质量M3(kg) 减速比r1/r2=1/R
JL=1/2*M1*r12 + (1/2*M2*r22)/R2 + M3*r12
JL=1/2*M1*r12 + 1/2*M2*r12 + M3*r12
特点: 专注驱动 可靠性与性能强大 应用行业广泛 与我们交手最多
简介: 业务领域:驱动控制 运动控制 系统控制。 其伺服产品可靠性高,性能优秀,在机床、印包、线 缆、金属制品等领域具备优势。 新推出sigama-V系列的系列性能优秀,骏马系列价格 便宜,具有很大的杀伤性。 在众多领域,我们都在与安川抗衡。
F
r
θ
r sin 作用線
rF sin F(r sin ) 力量力臂
2
3) 力矩的單位:S.I. 制中的單位為 牛頓‧公尺(N‧m)
4) 力矩的方向與符號:繞固定軸轉動的物體,力矩可使物體 產生逆時鐘方向,或順時鐘方向的轉動。因此力矩為一維 向量。力矩符號規則一般選取如下:
正號:逆時鐘方向。
= sqrt[(14.0592*0.2 + 1.3872*1 + 11.2852*0.2)/(0.2+1+0.2)]
= sqrt[(39.531+1.924+25.47)/1.4]
21
= 6.914 N.m
举例计算3
4. 选择伺服电机 伺服电机额定扭矩 T > Tf 且 T > Trms 伺服电机最大扭矩 Tmax > Tf + TA 最后选定1MV3-23C15CB-U131X电机。
• 位置控制器负责位置回路的控制,在多數的伺服驱动器中, 位置控制器主要是一个可调的比例放大器,其增益相当于 伺服回路的靜态回路增益。
25
伺服重要指标-频宽
• 一个位置伺服系统其追随误差与回路增益成反比,因此要 降低追随誤差,就必須调高伺服驱动器的回路增益。然而 一个位置伺服系统所能允許的最大回路增益与伺服驱动器 的频宽有着密切的关系,越高的回路增益也就意味著越宽 的伺服频宽,因此对速度回路与电流回路的设计要求也就 越为苛刻。
19
举例计算3
3. 计算电机驱动负载所需要的扭矩 克服摩擦力所需转矩Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9 = 1.387 N.m 重物加速时所需转矩TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9 = 1.769 N.m 螺杆加速时所需要转矩TA2 = JB * α/ η = JB * (N * 2π/ 60 / t1) / η
1. 计算折算到电机轴上的负载惯量(转轴与圆的直径重合) JL = 1/4*M * (D/2)2 /(R12 /4 ) = 50 * 144 / 4 / 100 = 18 kg.cm2 按照负载惯量 < 3倍电机转子惯量JM的原则 JM > 6 kg.cm2
2. 计算电机驱动负载所需要的扭矩 克服摩擦力所需转矩Tf = M * g * µ * (D / 2) / R2 / R1
• 在伺服系统里,频宽是伺服系统动态响应速度的度量。选 择伺服系统的频宽应根据系统实际需要加以确定,频宽过 低会限制系统的响应.
26
伺服响应频宽的概念
• 频带宽度简称带宽,由系统频率响应特性来规定, 反映伺服系统的跟踪的快速性。带宽越大,快速 性越好。当伺服系统(通常以速度闭环来举例) 速度环给定一个正弦波信号,则电机的速度也应 以正弦规律变化。保持给定正弦波的幅值,逐渐 提高正弦波的频率,电机速度的变化也会加高频 率。当给定频率提高到一定程度,通常是几十赫 兹时,响应正弦波的相位发生滞后,幅度下降 3db,这一点的给定频率就是响应带宽,这是伺 服的一个重要指标,它表征系统的响应速度、抗 扰动的能力,也极大地影响静态指标。