材料分拣系统机械系统设计单片机
材料自动分拣系统的PLC设计

材料自动分拣系统的PLC设计PLC(可编程逻辑控制器)是材料自动分拣系统中的核心控制单元。
它通常由中央处理器、输入/输出模块、通信模块和电源模块等组成。
PLC的设计要求具备以下功能:1.输入/输出处理:PLC需要能够处理外部传感器和执行机构的输入和输出。
因此,设计需要确保PLC具备足够的数字输入点和数字输出点,并且还应该考虑模拟输入和输出的数量。
2.灵活可扩展性:材料自动分拣系统的规模和要求有可能会发生变化,因此PLC设计应该具备灵活可扩展性。
这意味着PLC应该有足够的扩展槽,能够容纳多个输入/输出模块和通信模块。
3.高性能计算能力:PLC需要具备较高的计算能力,以便能够高效处理系统中传输的大量数据。
此外,它还需要快速的响应时间来满足实时性要求,确保系统可以准确地识别和分类物料。
4.高可靠性和稳定性:材料自动分拣系统需要长时间运行,因此PLC设计应该具备高可靠性和稳定性。
这要求PLC电源模块提供稳定的电源供应,同时需要考虑过电流和过电压保护电路来防止设备损坏。
5.通信能力:PLC需要与其他设备进行通信,例如与计算机、上位机或其它控制设备的通信。
因此,PLC设计需要支持多种通信协议,如以太网、串行通信等,以实现与其他设备的数据交换和控制。
6.用户界面:为了方便操作和维护,PLC设计还应该具备友好的用户界面。
这包括易于使用的编程软件、调试界面和监控界面,以便用户能够轻松地进行配置、监控和故障排除。
在PLC设计过程中,还需要考虑其他因素,如系统的安全性、抗电磁干扰能力等。
此外,为了确保PLC的可靠性和稳定性,还需要进行适当的故障检测和纠正措施。
总之,材料自动分拣系统的PLC设计需要满足输入/输出处理、灵活可扩展性、高性能计算能力、高可靠性和稳定性、通信能力和用户界面等要求。
通过合理的设计和选型,可以实现系统的高效运行和稳定性。
基于的物料分拣机械手自动化控制系统设计

基于的物料分拣机械手自动化控制系统设计物料分拣机械手的自动化控制系统设计是一项关键性的任务,它决定着整个系统的性能和效率。
以下是一个基于物料分拣机械手的自动化控制系统设计的详细说明。
1.系统概述:物料分拣机械手自动化控制系统旨在提高物料分拣过程的效率和准确性,降低人工成本。
该系统可以根据预设的程序自动完成物料的分拣、搬运和堆放操作。
2.硬件设计:物料分拣机械手的硬件设计主要包括机械结构、传感器、执行器和控制器。
机械结构设计要考虑平稳且高速的物料搬运,确保机械手的刚性和稳定性。
传感器用于检测物料的位置、形状和重量等信息,可选用光电传感器、压力传感器等。
执行器通常使用伺服电机或气动元件,以保证机械手的准确控制。
控制器可以选用PLC控制器或单片机等,用于控制整个机械手系统的运动。
3.软件设计:物料分拣机械手的软件设计包括运动控制算法和分拣策略。
运动控制算法负责计算机械手运动轨迹和速度,使其能够快速和准确地搬运物料。
分拣策略主要包括物料的分类和堆放规则,根据物料的属性和目标位置,选择最优的分拣路径和顺序。
4.系统优化:为了提高系统的性能和效率,可以考虑以下优化措施:-优化机械结构,提高机械手的速度、精度和稳定性。
-优化传感器的选型和布置,提高物料检测的准确性和灵敏度。
-优化运动控制算法,减少机械手的运动时间和能耗。
-优化分拣策略,提高分拣的准确性和效率。
-进行系统的实时监控和故障诊断,及时发现和解决问题。
5.系统测试和调试:在系统设计完成后,需要进行系统测试和调试,以验证系统的性能和稳定性。
测试内容包括机械手的精度和速度测试,传感器的准确性和灵敏度测试,以及软件算法的测试和验证。
通过测试和调试,可以对系统进行进一步的优化和改进。
总结:基于物料分拣机械手的自动化控制系统设计涉及到多个方面,包括机械结构设计、传感器选型、执行器选择、控制器选型、软件算法设计等。
通过系统的优化和调试,可以提高物料分拣的效率和准确性,降低人工成本。
材料分拣系统机械系统设计(单片机).

郑州大学现代远程教育毕业设计题目:双坐标十字滑台的设计入学年月____2014.11.24_______姓名____ _________学号_________专业___ ___联系方式__________学习中心______ ________指导教师_____ _________完成时间__2016__年__4__月__12__日目录1 绪论 (1)1.1 自动分拣系统的定义 (1)1.2 自动分拣系统研究现状及发展趋势 (1)2 系统硬件设计 (2)2.1 传感器的选型 (2)2.1.1 电感式传感器 (2)2.1.2 电容式传感器 (3)2.1.3 颜色传感器 (5)2.2 限位开关的设计 (6)2.3 电磁阀的设计 (7)2.4 PLC的选型 (8)2.5 PLC输入输出接线端子图 (9)3 系统软件设计 (10)3.1 控制系统流程图设计 (10)3.2 PLC梯形图程序设计 (11)3.3 整体梯形图 (12)3.4 PLC程序指令表 (12)4 总结 (14)参考文献 (15)1 绪论1.1 自动分拣系统的定义自动分拣是指货物进入分拣系统到指定的分配位置为止,都是按照系统设定的指令靠自动装置来完成的。
自动分拣系统一般由控制装置、分类装置、输送装置及分拣道口组成。
控制装置的作用是识别、接收和处理分拣信号,根据分拣信号的要求指示分类装置、按商品品种、按商品送达地点或按货主的类别对商品进行自动分类。
这些分拣需求可以通过不同方式,如可通过条形码扫描、色码扫描、键盘输入、重量检测、语音识别、高度检测及形状识别等方式,输入到分拣控制系统中去,根据对这些分拣信号判断,来决定某一种商品该进入哪一个分拣道口。
1.2 自动分拣系统研究现状及发展趋势我国自动分拣机的应用大约始于1980年代,近期的市场兴起和技术发展始于1997年。
自动分拣的概念先在机场行李处理和邮政处理中心得到应用, 然后普及到其他行业。
基于plc物料分拣机械手自动控制系统设计

基于PLC物料分拣机械手自动控制系统设计摘要:机械手是一种按固定程序抓取、搬运物件或操作工具的自动操作装置。
主要有手部、运动机构和控制系统三大部分组成。
本文在阐述其结构和工作原理的基础上,提出了用气动驱动和PLC控制的设计方案。
以三菱的FX2N系列可编程控制器为控制器设计机械手工作的控制系统,给出了输入输出分配表,并选择了相应的传感器,采用气动驱动,得到了可编程控制器外部硬件接线图,给出了相应的梯形图和指令表,实现对机械手的自动控制、故障报警等功能。
关键词:机械手;气动控制;PLC;自动化控制;物料分拣The Design on the Automatic Control System of the Sorting MaterialsManipulator Based on PLCAbstract:Fetching manipulator is a kind of automatic operation device which can move objects or tools According to fixed program. It mainly composes of hand, movement mechanism and control system. This paper puts forward the designing scheme of pneumatic drive and PLC control, on the basis of expounding its structure and working principle. With Mitsubishi FX2N series programmable controller work for controller design of manipulator control system, it gives the input and output allocation table, selecting the corresponding sensors, adopting pneumatic drive, getting the programmable controller external hardware wiring diagram and ladder diagram and instruction list and realizes of the automatic control of the manipulator, fault alarm, etc.Key words:manipulator; pneumatic-driven; programmable logic controller; automatic control; sorting materials引言随着工业的高速发展,机械手作为前沿的产品应自动化设备更新时的需要,已经在工业生产中得到了广泛的应用。
基于PLC的材料分拣模型控制系统设计

基于PLC的材料分拣模型控制系统设计一、引言在现代工业生产中,材料分拣是一个重要且常见的环节。
材料分拣可以将不同种类、不同属性的物料进行分类和分配,以满足生产的需求。
为了提高分拣效率和准确性,需要设计一个可靠的控制系统来实现材料分拣的自动化。
二、设计目标本次设计旨在设计一个基于PLC的材料分拣模型控制系统,实现以下目标:1.实现对不同种类材料的分拣和分配;2.提高分拣的准确性和效率;3.实现故障检测和自动化维修。
三、系统方案1.硬件设计本系统的主要硬件设备包括传感器、执行器和PLC控制器。
传感器用于检测材料的属性和位置信息,例如颜色传感器、光电开关和位置传感器。
执行器用于执行分拣和分配任务,例如电磁阀和电动机。
PLC控制器作为系统的核心控制设备,负责接收传感器的信号、执行相应的控制逻辑,并控制执行器完成分拣任务。
2.软件设计本系统的软件设计主要包括PLC程序设计和人机界面设计。
PLC程序设计是系统的核心,通过Ladder图编程,实现对传感器和执行器的控制逻辑。
人机界面设计是为了方便操作员监控和控制系统的运行状态,可以使用触摸屏或者上位机软件进行设计。
3.系统工作流程本系统的工作流程如下:(1)启动系统:操作员通过操作界面启动系统,PLC控制器开始运行。
(2)材料检测:传感器对传入的材料进行检测,获取材料的属性和位置信息。
(3)控制逻辑执行:PLC根据传感器的信号执行相应的控制逻辑,控制执行器完成分拣任务。
(4)分拣完成信号:当分拣任务完成时,系统发送完成信号。
(5)系统监控:操作员通过人机界面监控系统运行状态,可以查看材料分拣结果和系统故障信息。
(6)故障检测和维修:系统可以检测到传感器故障或执行器故障,并进行自动化维修或发送故障信息。
四、总结本次设计基于PLC的材料分拣模型控制系统,实现了对不同种类材料的分拣和分配,并提高了分拣的准确性和效率。
通过软件设计和硬件设计的协调工作,实现了系统的自动化和人机交互功能。
(完整word版)分拣机器人单片机控制系统设计

学校代码: 10128学号: *********(本科毕业设计说明书题目:分拣机器人单片机控制系统设计学生姓名:学院:系别:专业:班级:指导教师:二〇一七年五月摘要一般的分拣机器人由于其操作方式较复杂,分拣的效率较差,人机交互系统的不太完善,机械性能欠佳等已经很难满足当今社会的生产实践需要。
伴随着社会的飞速发展,人们对性能优良智能分拣人的需求也与日俱增.设计一款基于单片机的分拣机器人有很大的实践需要和社会功能。
根据控制系统的要求,决定采用美国INTEL公司MCS—51系列单片机基本产品89C52,作为分拣机器人的主控制芯片.它具有运行速度快,功耗低,抗干扰能力强等优点,能够完全我的设计要求。
本系统包括硬件和软件两个部分。
硬件系统主要包括电压转换电路的设计、单片机连接PC机串口电路的设计,单片机系统的设计,驱动电路的设计,显示电路的设计等。
在电路图板上完成各模块的设计与连接。
分析易得,此系统可以完全满足设计需要。
通过光耦等器件克服电机驱动部分与单片机部分的相互干扰。
关键词:单片机;硬件设计;软件编程;89C52AbstractThe general sorting robot is more complicated due to its operation,sorting is less efficient,human-computer interaction system is not perfect,poor mechanical performance has been difficult to meet the needs of today’s social production practice. Accompanied by the rapid development of society,the demand for smart sorters is also growing。
The design of a sorting robot based on a single chip has a great practical need and social function.According to the requirements of the control system,Decided to adopt the United States INTEL MCS-51 series of basic products 89C52,as the main control chip for the sorting robot。
基于51单片机快递自动分拣控制系统的设计

基于51单片机快递自动分拣控制系统的设计
摘要:
近年来,随着快递业务的不断发展,快递自动分拣技术也在逐步完善。
本文设计了一种基于51单片机的快递自动分拣控制系统,该系统通过光电传感器、马达和蜂鸣器等模块实现了自动分类和分拣的功能。
首先,该系统通过光电传感器实现了快递箱的检测功能,当快递箱通过光电传感器时,系统能够识别快递箱的类型和编号。
接着,通过编码器和电机的组合,实现了快递箱的定位和分拣的功能。
最后,该系统通过蜂鸣器和LED灯等模块,实现了自动提示和报警功能。
实验结果表明,该系统能够高效、准确地完成相应的分拣任务,达到了预期的效果。
本文的设计对于快递自动分拣领域有一定的参考价值,对于提高快递分拣效率和自动化程度具有重要的意义。
基于单片机的自动分拣机器人定位系统设计

基于单片机的自动分拣机器人定位系统设计王国贵【摘要】在物流高速发展的今天,物品分拣是物流当中的重要环节,传统的物品分拣是由人工来完成的,不仅耗时耗力,而且还无法长时间工作,因而促使了分拣机器人的出现,目的就是代替人类完成这种重复度高的工作,从而大大地解放人力.本文研究了自动分拣机器人定位系统的设计,机器人能否准确地停在指定区域,将会影响机械手能否在它的工作范围内抓取到目标物体.设计中使用到两个红外光电开关,用来检测地面的颜色,分别安装在机器人的前后端,前段的用来判断机器人是否已经进入指定区域,尾端的用来判断机器人是否整体进入指定区域.本文的研究对于提高分拣机器人的智能化水平和自适性能力,都具有重要的意义和价值.【期刊名称】《电声技术》【年(卷),期】2019(043)002【总页数】3页(P69-71)【关键词】单片机;分拣机器人;定位系统【作者】王国贵【作者单位】盐城生物工程高等职业技术学校,江苏盐城224000【正文语种】中文【中图分类】TP391.4120世纪60年代,世界首台工业机器人面市,自此之后,全球各个国家针对于机器人所展开的研究越来越多,机器人技术得到迅猛发展。
在工业领域,机器人发挥着重要的作用,工业机器人一方面提升了工业的生产率,另一方面可以有效地解决即定环境之下人工不能实现的问题。
大量机器人进入工作生产之中发挥作用,这也令企业的生产与管理更加简单、更加快捷,一方面使得产品的生产周期得到了有效的缩短,另一方面也有效提升了产品的整体质量,并且可以控制成本、提升安全系数。
工业机器人技术的出现,使得人类对于传统工业生产的认知被颠覆[1,2]。
物流行业在国内属于一个快速崛起的新兴产业,它可以为整个社会的生产与生活提供良好的供给,同时,物流行业属于多产业结合的综合性产业类型,运输业、仓储业、通信业等多个行业的共同融合与协作之下,才形成了当前的物流产业体系[3-5]。
科技不断创新发展之下,物流速度不断提升,物流的精准度也越来越高,人们开始借助于新型科学技术改造当前的物流装备,提升物流的整体管理水平。
基于单片机控制的质量分拣装置设计
基于单片机控制的质量分拣装置设计在自动化生产线的各个环节中,分拣装置是其中的一个重要环节。
最早的分拣装置为人工分拣装置,因劳动强度大、错误率高、生产效率低、工作环境恶劣等原因早被淘汰。
生产效率对企业来说是一项极重要的指标,只有高的生产效率,企业才可以拥有旺盛的生命力[1],此时自动分拣装置便应运而生。
自动分拣装置具有多种优点,加入了闭环控制算法,是传统的分拣装置不能代替的,所以其应用也变得越来越广泛。
1总体方案设计传送带上的产品有两个质量区间:大于或小于某个设置的质量数值,即误差在一定的范围内才符合要求,对于橡胶厂胶条要在30kg+5g 这个数值范围内。
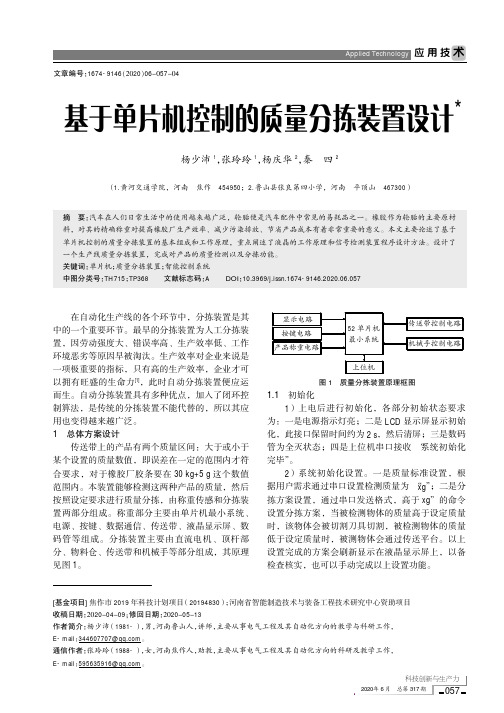
本装置能够检测这两种产品的质量,然后按照设定要求进行质量分拣,由称重传感和分拣装置两部分组成。
称重部分主要由单片机最小系统、电源、按键、数据通信、传送带、液晶显示屏、数码管等组成。
分拣装置主要由直流电机、顶杆部分、物料仓、传送带和机械手等部分组成,其原理见图1。
1.1初始化1)上电后进行初始化,各部分初始状态要求为:一是电源指示灯亮;二是LCD 显示屏显示初始化,此接口保留时间约为2s ,然后清屏;三是数码管为全灭状态;四是上位机串口接收“系统初始化完毕”。
2)系统初始化设置。
一是质量标准设置,根据用户需求通过串口设置检测质量为“x g ”;二是分拣方案设置,通过串口发送格式,高于x g ”的命令设置分拣方案,当被检测物体的质量高于设定质量时,该物体会被切割刀具切割,被检测物体的质量低于设定质量时,被测物体会通过传送平台。
以上设置完成的方案会刷新显示在液晶显示屏上,以备检查核实,也可以手动完成以上设置功能。
文章编号:1674-9146(2020)0657-04杨少沛1,张玲玲1,杨庆华2,秦四2[基金项目]焦作市2019年科技计划项目(20194830);河南省智能制造技术与装备工程技术研究中心资助项目收稿日期:2020-04-09;修回日期:2020-05-13作者简介:杨少沛(1981-),男,河南鲁山人,讲师,主要从事电气工程及其自动化方向的教学与科研工作,E-mail :****************。
分拣机器人单片机控制系统设计说明

学校代码: 10128学号: 010202064(本科毕业设计说明书题目:分拣机器人单片机控制系统设计学生姓名:学院:系别:专业:班级:指导教师:二〇一七年五月摘要一般的分拣机器人由于其操作方式较复杂,分拣的效率较差,人机交互系统的不太完善,机械性能欠佳等已经很难满足当今社会的生产实践需要。
伴随着社会的飞速发展,人们对性能优良智能分拣人的需求也与日俱增。
设计一款基于单片机的分拣机器人有很大的实践需要和社会功能。
根据控制系统的要求,决定采用美国INTEL公司MCS-51系列单片机基本产品89C52,作为分拣机器人的主控制芯片。
它具有运行速度快,功耗低,抗干扰能力强等优点,能够完全我的设计要求。
本系统包括硬件和软件两个部分。
硬件系统主要包括电压转换电路的设计、单片机连接PC机串口电路的设计,单片机系统的设计,驱动电路的设计,显示电路的设计等。
在电路图板上完成各模块的设计与连接。
分析易得,此系统可以完全满足设计需要。
通过光耦等器件克服电机驱动部分与单片机部分的相互干扰。
关键词:单片机;硬件设计;软件编程;89C52AbstractThe general sorting robot is more complicated due to its operation,sorting is less efficient,human-computer interaction system is not perfect,poor mechanical performance has been difficult to meet the needs of today's social production practice. Accompanied by the rapid development of society,the demand for smart sorters is also growing。
材料自动分拣系统的PLC设计

材料自动分拣系统的PLC设计摘要利用可编程控制器(PLC),设计成本低、效率高的材料自动分拣装置.以PLC为主控制器,结合气动装置、传感技术、位置控制等技术,运用梯形图编程,实现对铁块及不同颜色材料的自动分拣。
系统具有自动化程度高、运行稳定、精度高、易控制的特点,可根据不同对象,稍加修改本系统即可实现要求.本设计采用的是三菱系列的可编程控制器(PLC)。
第一章进行了设计的分析。
第二章根据对设计的分析进行了方案的确定和PLC型号的选用,同时进行了IO接点的分配。
第三章进行了电气原理图的设计同时对按钮等电器元件进行了选用,第四章进行了PLC程序的设计和操作过程的叙述。
关键词:可编程控制器,分拣装置,控制系统,传感器。
The Design of Material Selecting System By PLC ControlledABSTRACTThe design of an automatic sorting with low cost and high efficiency is presented in the paper,which regards programmable logic controller(PLC) as the master controller and combines pneumatic device,sensing technology,position control and other technology to implement automatic selecting of the products live.Program with the ladder-shape figure,designing the automatic system that sorts out iron,aluminum and plastic and different colour.The device is characteristic of high automation, steady running, high precision and easy control, which can fulfill the requirement according to different situations with little modifications.This design adoption is the programmable controller(PLC) of Mitsubishi series.Chapter 1 carried on the analysis of design.Chapter 2 according to carrying on a project really and settling with PLC to the analysis of design the choice of the model number, carried on the allotment of IO point of contact in the meantime.Chapter 3 carried on the design of electricity principle diagram to wait an electric appliances component to carry on choice towards pressing button in the meantime, chapter 4 carried on PLC the design of the procedure and the description of the operation process.KEY WORDS: programmable logic controller,sorting device,control system,sensors目录前言 (1)第1章多种材料分拣装置系统设计分析 (2)1.1设计对象介绍 (3)1.1.1 课题任务提出 (3)1.1.2控制方案选择 (4)第2章材料分拣系统方案分析 (5)2.1 用户I/O设备及所需PLC的I/O点数 (5)2.2 用户存储容量的选择 (6)2.3 PLC型号的选择 (6)第3章材料自动分拣装置系统的硬件设计 (8)3.1 自动分拣装置系统的设计过程 (8)3.1.1 自动分拣系统动作顺序分析 (8)3.3.2设计要求 (8)3.1.3 保护要求 (9)3.2电气元件的选择 (9)3.2.1 按钮的选用 (9)3.2.2 传感器的选用 (9)3.2.3 电机的选用 (10)3.2.4 变频器的选用 (10)3.3 PLCI/O点实际接线图 (14)3.3.1 PLC的接线 (14)3.3.2 PLC的I/0接线图 (15)第4章PLC程序设计 (17)4.1系统的顺序功能图设计 (17)4.1.1系统的顺序功能图如下图4-1所示: (18)4.2 梯形图程序设计 (20)4.2.1黄灯及其闪烁控制部分 (20)4.2.2红灯禁止下料控制部分 (22)4.2.3蜂鸣器控制程序 (23)4.2.3传送带材料计数控制程序 (24)4.2.4其他主要程序设计 (25)第5章调试与抗干扰系统分析 (26)5.1 程序的模拟调试 (26)5.2程序的现场调试 (26)5.3 系统调试 (27)5.3.1 调试过程 (27)5.3.2 调试结果 (27)5.4 PLC的抗干扰系统 (28)5.4.1电磁干扰源及对系统的干扰 (28)5.4.2 PLC控制系统中电磁干扰的主要来源 (28)5.4.3 PLC控制系统工程应用的抗干扰设计 (30)5.4.4主要抗干扰措施 (30)结论 (32)谢辞 (33)参考文献 (34)附录 (35)外文资料翻译 (47)前言PLC是从20世纪末发展起来的一种新型的电气控制装置,它将传统的继电器控制技术和计算控制技术、通信技术融为一体,以其显著的优点正被广泛地应用于各种生产机械和生产过程的自动控制中。
基于单片机的自动拣货系统设计毕业设计论文

毕业设计论文基于单片机的自动拣货系统设计诚信申明本人申明:我所呈交的本科毕业设计(论文)是本人在导师指导下对四年专业知识而进行的研究工作及全面的总结。
尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中创新处不包含其他人已经发表或撰写过的研究成果,也不包含为获得北京化工大学或其它教育机构的学位或证书而已经使用过的材料。
与我一同完成毕业设计(论文)的同学对本课题所做的任何贡献均已在文中做了明确的说明并表示了谢意。
若有不实之处,本人承担一切相关责任。
本人签名:年月日目录第1章绪论 (9)1.1选题背景及研究意义 (9)1.2分拣系统的介绍 (10)1.3分拣系统的发展展望 (10)1.4课题设计的主要内容 (12)第2章系统总体设计 (13)2.1设计要求 (13)2.2功能特点 (13)第3章方案的论证 (15)3.1主控芯片的选择 (15)3.2显示模块 (15)3.3光电传感器的选择 (16)3.4电机驱动模块的选择 (16)3.5铁传感器的选用 (16)3.6铝传感器的选用 (17)3.7颜色传感器的选用 (19)第4章系统硬件设计 (20)4.1硬件模介绍 (20)4.1.1单片机技术简介 (20)4.1.2系统主要芯片和元器件的介绍及应用 (20)4.1.3 ULN2003电机驱动模块介绍 (23)4.1.4 LCD液晶显示模块介绍 (24)4.1.5 蜂鸣器模块 (27)4.1.6 霍尔传感器 (28)4.2单片机最小系统的设计 (29)4.2.1 时钟脉冲电路 (29)4.2.2复位电路 (29)4.3硬件设计总图 (30)第5章软件程序设计 (31)5.1软件程序整体设计 (31)5.1.1程序流程图 (31)5.2程序模块设计 (31)5.2.1 电机控制程序设计 (31)5.2.2 LCD1602显示程序设计 (33)5.2.3按键扫描程序设计 (34)第6章系统测试及分析 (42)6.1系统测试 (42)总结 (43)参考文献 (44)附录A (45)1.系统整体电路图 (45)致谢 (46)基于单片机金属自动分拣系统设计zzzzxxxxxxxxxx0601班学号060401001指导教师张三副教授摘要:随着科学技术的飞速发展,现代工业控制系统越来越复杂,传统控制科学面临着新的挑战。
基于单片机的自动分拣机控制系统设计

第一章绪论……………………………………...…………………………………....................1
1.1分拣系统简介………………………………………………………………………………1
1.2主要任务……………………………………………………………………………………1
3.5.2本文应用..………………………………………………………………………….…13
3.6蜂鸣器….…..……………………………………………………………………………..14
3.6.1蜂鸣器概述…….…..…………………………………………………………………14
3.6.2本文应用………......………………………………….………………………………14第四章软件设计……………………………………………………………………………….15
3.2.1 74LS138译码器概述………………...………………………………………………10
3.2.2本文应用…………………………………………………………….………..………10
3.3 ULN2003A驱动芯片…………………………………………………………………….11
3.3.1ULN2003A驱动芯片概述…….......…………………………………………………11
该系统应用的意义在于:提高邮件分拣效率及精准率、降低工人劳动强度、缩短在此方面与国外发达国家的距离。
第一章 绪 论
1.1分拣系统简介
自动分拣系统(Automatic sorting system)是先进配送中心所必需的设施条件之一。具有很高的分拣效率,通常每小时可分拣商品6000-12000箱;可以说,自动分拣机是提高物流配送效率的一项关健因素。它是二次大战后在美国、日本的物流中心中广泛采用的一种自动分拣系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。自动分拣系统一般由控制装置、分类装置、输送装置及分拣道口组成。
基于单片机的智能分拣搬运机器人的设计与实现

基于单片机的智能分拣搬运机器人的设计与实现简介随着智能物流的快速发展,分拣和搬运机器人在仓储和物流行业中扮演着越来越重要的角色。
本文将介绍一种基于单片机的智能分拣搬运机器人的设计与实现,该机器人能够根据预设的程序和传感器反馈,完成自动分拣和搬运任务。
设计要求•分拣搬运机器人需要具备自动分拣和搬运功能。
•机器人应该能够根据预设的程序进行自主导航和路径规划。
•机器人需要能够感知周围环境,包括障碍物、货物和底部线路等。
•机器人应该具备智能化的控制系统,可以通过通信接口与其他设备进行数据交换。
•设计应考虑成本、可靠性和稳定性等因素。
硬件设计分拣搬运机器人的硬件设计需要考虑以下几个方面:1. 控制单元采用单片机作为机器人的控制单元,常见的选择包括STM32系列和Arduino等。
单片机负责接收传感器数据,进行逻辑控制和运动控制,并发送控制信号给执行机构。
2. 传感器机器人需要安装多种传感器来感知周围环境,确保机器人能够准确地分拣和搬运货物。
常用的传感器包括: - 摄像头或激光传感器:用于检测环境中的障碍物和货物。
- 红外传感器:用于检测底部线路,进行自动导航。
- 距离传感器:用于测量机器人与障碍物的距离,避免碰撞。
3. 执行机构机器人需要具备搬运货物的功能,因此需要安装执行机构。
常见的执行机构包括电动轮椅或直流电机等。
根据设计需求,可以选择不同类型的执行机构。
软件设计分拣搬运机器人的软件设计需要实现以下功能:1. 自主导航和路径规划机器人能够自主导航和路径规划是实现分拣搬运任务的关键。
通过摄像头或激光传感器获取环境信息,利用算法进行路径规划,并控制执行机构进行移动。
2. 分拣算法机器人需要能够根据设定的规则对货物进行分类和分拣。
分拣算法可以根据货物的形状、颜色或其他特征进行分类,将货物放置在对应的位置上。
3. 通信接口机器人应该能够与其他设备进行数据交换,例如与仓储管理系统进行通信,接收分拣任务和发送分拣结果。
基于PLC的物料分拣机械手自动化控制系统设计

基于PLC的物料分拣机械手自动化控制系统设计物料分拣是工业生产过程中常见的自动化操作之一,而机械手作为自动化设备的核心部件之一,在物料分拣中发挥着重要的作用。
本文将针对基于PLC的物料分拣机械手自动化控制系统的设计进行详细说明。
1.系统概述2.系统设计(1)PLC控制器选择:根据系统需求选择适合的PLC控制器,一般要求具有足够的输入输出端口以及较高的运算速度。
常见的PLC控制器有西门子、施耐德、欧姆龙等。
(2)机械手选择:根据物料的类型和分拣要求选择适合的机械手。
常见的机械手有直线式机械手、旋转式机械手等,可以根据需要组合使用。
(3)传感器选择:根据物料的特性和分拣要求选择适合的传感器。
常见的传感器有光电传感器、接近传感器、压力传感器等,用于检测物料的位置、重量、形状等参数。
(4)执行器选择:根据物料分拣的方式选择适合的执行器。
常见的执行器有气缸、电机、伺服驱动器等,用于实现机械手的运动。
3.系统实现(1)输入模块设置:将传感器的信号通过输入模块连接到PLC控制器的输入端口,实现对物料位置和状态的检测。
(2)处理模块编程:根据物料分拣的逻辑和要求进行PLC控制器的编程,包括控制机械手的运动、执行器的操作以及与传感器的通信等。
(3)输出模块设置:将PLC控制器的输出信号通过输出模块连接到执行器,实现对机械手和执行器的控制。
(4)系统调试和运行:将整个系统进行组装和调试,确保各个部件能够正常工作,并进行系统联调测试,验证系统的可靠性和稳定性。
4.系统优化在系统运行过程中,可以根据实际需求对系统进行优化和改进。
例如,可以通过增加传感器的数量和种类来提高物料分拣的准确性和效率;可以调整机械手的运动轨迹和速度,以适应不同的物料类型和分拣要求;可以改进控制算法,提高系统的响应速度和精度等。
总结:基于PLC的物料分拣机械手自动化控制系统的设计涉及到PLC控制器的选择、机械手的选择、传感器的选择、执行器的选择,以及输入模块设置、处理模块编程、输出模块设置等内容。
基于单片机的智能分拣搬运机器人的设计与实现

基于单片机的智能分拣搬运机器人的设计与实现基于单片机的智能分拣搬运机器人的设计与实现,其主要功能是将物品从一个地方运送到另一个地方,并且可以在需要的时候进行分拣和搬运操作。
为了实现这一功能,需要设计一个基于单片机的智能分拣搬运机器人的系统。
一、系统硬件设计系统硬件包括单片机、机器人平台、传感器、电机驱动器等组件。
单片机是控制系统的核心,负责控制机器人的各个部件进行操作。
机器人平台是机器人的基座,用于支撑机器人并进行固定在位。
传感器用于检测机器人周围的环境和物品的位置、大小等信息。
电机驱动器用于控制机器人的电机,实现搬运和分拣等功能。
二、系统软件设计系统软件包括算法控制模块和机器人控制模块。
算法控制模块是控制系统的核心,负责根据物品的位置、大小等信息,控制机器人执行相应的操作。
机器人控制模块是机器人控制系统的核心,负责根据算法控制机器人执行搬运和分拣等操作。
三、系统工作流程系统工作流程分为以下几个步骤:1、物品检测。
传感器检测物品的位置和大小信息,并将检测结果输入到算法控制模块。
2、物品分拣。
算法控制模块根据物品的位置和大小等信息,确定物品的类别,并将分拣结果输入到机器人控制模块。
3、物品搬运。
机器人控制模块根据算法控制机器人的电机,对物品进行搬运操作,并将搬运结果输出到传感器。
4、物品分拣。
机器人控制模块根据搬运结果,再次确定物品的类别,并将分拣结果输入到算法控制模块。
5、系统启动。
算法控制模块根据物品的位置和大小等信息,控制机器人执行相应的操作,并将系统启动结果输出到机器人控制模块。
6、系统维护。
系统维护包括对传感器、电机驱动器等进行更换、调试等工作,。
物流配送材料分拣系统机械系统设计
物流配送材料分拣系统机械系统设计摘要随着国内现代化技术的迅猛发展,自动控制技术在制造、物流等行业应用非常广泛,同时市场的竞争越来越激烈,很多企业在生产过程中都应用了各种各样的自动生产线或者进行了生产设备的自动化升级改造。
通过应用自动控制技术,从而大大提高了企业的生产效率,减少了人工劳动强度,同时在质量控制方面也得到了明显的改善,企业生产过程控制在很多方面都有了很大的提高,所W研制投入自动化生产线也就成为了现代化生产技术发展的必然趋势之一。
随着人们购买力的提高,物流行业迎来了飞速发展的黄金时期,借助工业自动化和智能化等先进技术,物流分拣传送工作取得了质的飞跃。
当前绝大多数物流分拣系统都已经实现了智能化控制,不需要依靠人工就可以大批量、连续准确地完成分拣任务。
本文对物流分拣传统系统进行分析,研究其如何实现智能化控制。
本论文在系统介绍了智能分拣设备技术的应用方面,设计了基于PLC(可编程控制器)和多传感器融合的智能分拣系统。
关键词:物流配送;分拣系统;PLC一、绪论(一)研究背景现代工业生产中自动化水平不断提高,传统的人工分炼方式已跟不上现代化工业的发展趋势。
在现代化工厂,人工分割的生产线上连续大量的资料容易引起精炼误差,生产效率低。
随着科技的快速发展,机械生产过程和电子等多个行业已经设计应用了许多功能和各种自动化生产线,现代工业生产的自动化生产技术在大幅提高产品质量、生产效率、改善工人工作条件、降低能耗、节约材料等方面取得了显着效果。
在企业生产组装过程中,自动检测和分炼技术是企业自动化生产流水作业的重要条件,自动化技术的应用成为必然趋势。
企业生产采用自动化设备,提高自动化生产水平,在生产过程中不断重复,要求高精度的工作,在先进的生产制造领域发挥着重要作用。
生产型企业要求产品分拣包装效率和成本控制高。
提高所以分拣生产效率是不断改善许多企业生产效率的重要措施之一。
自动分炼技术随着现代科学技术的发展,在现代市场上得到了应用,自动分拣系统集成了可编程控制器、机械传动和气动控制、人机界面、电机拖动等技术的应用,其中应用可编程控制器技术是自动化的重要组成部分,自动控制、具有监控作用的系统是为了满足实际应用环境而设计的系统功能包括产品的分室、处理、显示、人与人的交互等操作,稳定的控制系统影响着整个系统的顺畅运行和控制作用,影响着整个分室系统过程的控制质量。
基于单片机的智能物流机器人设计(自动分拣)

基于单片机的智能物流机器人设计(自动分拣)摘要本文介绍了一种基于单片机的智能物流机器人设计,该设计能够实现自动分拣功能。
智能物流机器人的出现提高了物流行业的效率和准确性,在仓库和物流中心广泛应用。
引言随着电子商务的迅猛发展,物流行业也迎来了巨大的挑战。
为了应对日益增长的物流需求,各种智能设备被引入到仓库和物流中心,以提高处理速度和减少人力成本。
设计原理1. 单片机选择和编程:使用高性能的单片机作为控制核心,通过编程实现机器人的自动分拣功能。
2. 传感器和感知技术:机器人配备多种传感器,如红外线传感器、超声波传感器和图像识别技术,用于检测和感知物品的位置和属性。
3. 运动控制和路径规划:机器人通过电机和运动控制模块实现精确的运动控制,并通过路径规划算法确定最佳的分拣路径。
4. 数据处理和通信:机器人通过网络通信模块将感知到的数据传输到中央服务器,以便进一步的数据处理和统计分析。
系统实现1. 机械结构设计:机器人采用轮式底盘结构,配备多个分拣装置,能够同时处理多个分拣任务。
2. 软件开发:根据设计需求,编写机器人的控制程序,并进行系统的测试和调试,确保机器人能够准确地完成分拣任务。
3. 系统集成和测试:将机械结构和软件系统进行集成,并进行整体测试,验证机器人的性能和稳定性。
结论基于单片机的智能物流机器人设计能够实现自动分拣功能,对于提高物流行业的效率和准确性具有重要意义。
该设计通过合理选择和编程单片机、使用传感器和感知技术、运动控制和路径规划、数据处理和通信等技术手段,实现了机器人的智能化分拣功能。
随着技术的不断发展和应用的推广,智能物流机器人将在物流行业发挥越来越重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
材料分拣系统机械系统设计单片机集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)郑州大学现代远程教育毕业设计题目:双坐标十字滑台的设计入学年月___________姓名____ _________学号_________专业___ ___联系方式__________学习中心______ ________指导教师_____ _________完成时间__2016__年__4__月__12__日目录1 绪论 (1)1.1 自动分拣系统的定义 (1)1.2 自动分拣系统研究现状及发展趋势 (1)2 系统硬件设计 (2)2.1 传感器的选型 (2)2.1.1 电感式传感器 (2)2.1.2 电容式传感器 (3)2.1.3 颜色传感器 (5)2.2 限位开关的设计 (6)2.3 电磁阀的设计 (7)2.4 PLC的选型 (8)2.5 PLC输入输出接线端子图 (9)3系统软件设计 (10)3.1控制系统流程图设计 (10)3.2 PLC梯形图程序设计 (11)3.3整体梯形图 (12)3.4 PLC程序指令表 (12)4总结 (14)参考文献 (15)1 绪论1.1 自动分拣系统的定义自动分拣是指货物进入分拣系统到指定的分配位置为止,都是按照系统设定的指令靠自动装置来完成的。
自动分拣系统一般由控制装置、分类装置、输送装置及分拣道口组成。
控制装置的作用是识别、接收和处理分拣信号,根据分拣信号的要求指示分类装置、按商品品种、按商品送达地点或按货主的类别对商品进行自动分类。
这些分拣需求可以通过不同方式,如可通过条形码扫描、色码扫描、键盘输入、重量检测、语音识别、高度检测及形状识别等方式,输入到分拣控制系统中去,根据对这些分拣信号判断,来决定某一种商品该进入哪一个分拣道口。
1.2 自动分拣系统研究现状及发展趋势我国自动分拣机的应用大约始于1980年代,近期的市场兴起和技术发展始于1997年。
自动分拣的概念先在机场行李处理和邮政处理中心得到应用, 然后普及到其他行业。
随着业界对现代化物流的实际需求的增长,各行业对高速精确的分拣系统的要求正在不断地提高。
这一需求最明显地表现在烟草、医药、图书及超市配送领域, 并有望在将来向化妆品及工业零配件等领域扩展。
这些领域的一个共同特点是产品的种类繁多、附加值高、配送门店数量多、准确性要求高和人工处理效率低等特点。
随着社会的不断发展,市场的竞争也越来越激烈,因此各个生产企业都迫切地需要改进生产技术,提高生产效率,尤其在需要进行材料分拣的企业,以往一直采用人工分拣的方法,致使生产效率低,生产成本高,企业的竞争能力差,材料的自动分拣已成为企业的唯一选择。
目前自动分拣已逐渐成为主流,因为自动分拣是从货物进入分拣系统送到指定的分配位置为止,都是按照人们的指令靠自动分拣装置来完成的。
这种装置是由接受分拣指示情报的控制装置、计算机网络,把到达分拣位置的货物送到别处的的搬送装置。
由于全部采用机械自动作业,因此,分拣处理能力较大,分拣分类数量也较多;另外组态软件的的发展,为物料分拣系统增添了新的活力。
2 系统硬件设计2.1 传感器的选型2.1.1 电感式传感器此传感器接近开关属于有开关量输出的位置传感器,用来检测金属物体。
它由LC高频振荡器和放大处理电路组成,利用金属物体在接近这个能产生电磁场的振荡感应头时,使物体内部产生涡流。
这个涡流反作用于接近开关,使接近开关振荡能力衰减,内部电路的参数发生变化。
由此,可识别出有无金属物体接近,进而控制开关的通或断。
本系统用该器件来检测铁质材料。
电感式接近传感器选择LE4-1K,技术参数如表3.1:图3.1 电感传感器工作原理图图3.2 电感传感器LE4-1K成品图电感传感器介绍:由铁心和线圈构成的将直线或角位移的变化转换为线圈电感量变化的传感器,又称电感式位移传感器。
这种传感器的线圈匝数和材料导磁系数都是一定的,其电感量的变化是由于位移输入量导致线圈磁路的几何尺寸变化而引起的。
当把线圈接入测量电路并接通激励电源时,就可获得正比于位移输入量的电压或电流输出。
电感式传感器的特点是:①无活动触点、可靠度高、寿命长;②分辨率高;③灵敏度高;④线性度高、重复性好;⑤测量范围宽(测量范围大时分辨率低);⑥无输入时有零位输出电压,引起测量误差;⑦对激励电源的频率和幅值稳定性要求较高;⑧不适用于高频动态测量。
电感式传感器主要用于位移测量和可以转换成位移变化的机械量(如力、张力、压力、压差、加速度、振动、应变、流量、厚度、液位、比重、转矩等)的测量。
常用电感式传感器有变间隙型、变面积型和螺管插铁型。
在实际应用中,这三种传感器多制成差动式,以便提高线性度和减小电磁吸力所造成的附加误差。
2.1.2 电容传感器此传感器属于具有开关量输出的位置传感器,是一种接近式开关。
它的测量头通常是构成电容器的一个极板,而另一个极板是待测物体的本身。
当物体移向接近开关时,物体和接近开关的介电常数发生变化,使得和测量头相连的电路状态也随之发生变化。
由此,便可控制开关的接通和关断。
本装置中电容传感器是用于检测铝质材料。
电容式传感器选择OMRON的E2K—X81ME1型,技术参数如表3.2:图3.3 电容传感器工作原理图图3.4 电容传感器E2K—X81ME1成品图电容传感器介绍:用电测法测量非电学量时,首先必须将被测的非电学量转换为电学量而后输入之。
通常把非电学量变换成电学量的元件称为变换器;根据不同非电学量的特点设计成的有关转换装置称为传感器,而被测的力学量(如位移、力、速度等)转换成电容变化的传感器称为电容传感器。
从能量转换的角度而言,电容变换器为无源变换器,需要将所测的力学量转换成电压或电流后进行放大和处理。
力学量中的线位移、角位移、间隔、距离、厚度、拉伸、压缩、膨胀、变形等无不与长度有着密切联系的量;这些量又都是通过长度或者长度比值进行测量的量,而其测量方法的相互关系也很密切。
另外,在有些条件下,这些力学量变化相当缓慢,而且变化范围极小,如果要求测量极小距离或位移时要有较高的分辨率,其他传感器很难做到实现高分辨率要求,在精密测量中所普遍使用的差动变压器传感器的分辨率仅达到1~5 μm数量级;而有一种电容测微仪,他的分辨率为0.01 μm,比前者提高了两个数量级,最大量程为100±5μm,因此他在精密小位移测量中受到青睐。
对于上述这些力学量,尤其是缓慢变化或微小量的测量,一般来说采用电容式传感器进行检测比较适宜,主要是这类传感器具有以下突出优点:(1)测量范围大其相对变化率可超过100%;(2)灵敏度高,如用比率变压器电桥测量,相对变化量可达10-7数量级;(3)动态响应快,因其可动质量小,固有频率高,高频特性既适宜动态测量,也可静态测量;(4)稳定性好由于电容器极板多为金属材料,极板间衬物多为无机材料,如空气、玻璃、陶瓷、石英等;因此可以在高温、低温强磁场、强辐射下长期工作,尤其是解决高温高压环境下的检测难题。
2.1.3 颜色传感器此传感器属于具有开关量输出的位置传感器。
它是在Si等多数光电二极管之前,分别放置R(红)、G(绿)、B(蓝)三种颜色的彩色滤光器,以便处理各自的输出信号并识别彩色的方法。
材料分拣系统采用它主要是用来识别绿色与黄色的材料。
本系统共设置了三个检测材料的传感器,同时预留了一个空余的电磁阀与气缸用来添加其它的传感器。
用户可以根据自己的需求选择相应的传感器安装即可。
选用TAOS公司生产的,型号为TCS230颜色传感器。
此传感器为RGB(红绿蓝) 颜色传感器,可检测目标物体对三基色的反射比率,从而鉴别物体颜色。
TCS230传感器引脚如下图所示。
图3.5 TCS230颜色传感器图3.6 颜色传感器TCS230成品图RGB 颜色传感器介绍:TCS230是美国TAOS公司生产的一种可编程彩色光到频率的转换器。
该传感器具有分辨率高、可编程的颜色选择与输出定标、单电源供电等特点;输出为数字量,可直接与微处理器连接。
它把可配置的硅光电二极管与电流频率转换器集成在一个单一的CMOS电路上,同时在单一芯片上还集成了红绿蓝(RGB)三种滤光器,是业界第一个有数字兼容接口的RGB彩色传感器。
TCS230的输出信号是数字量,可以驱动标准的TTL或CMOS逻辑输入,因此可直接与微处理器或其它逻辑电路相连接。
由于输出的是数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
TCS230采用8引脚的SOIC 表面贴装式封装,在单一芯片上集成有64个光电二极管。
这些二极管共分为四种类型。
其中16个光电二极管带有红色滤波器,16个光电二极管带有绿色滤波器,16个光电二极管带有蓝色滤波器,其余16个不带有任何滤波器,可以透过全部的光信息。
这些光电二极管在芯片内是交叉排列的,能够最大限度地减少入射光幅射的不均匀性,从而增加颜色识别的精确度;另一方面,相同颜色的16个光电二极管是并联连接的,均匀分布在二极管阵列中,可以消除颜色的位置误差。
工作时,通过两个可编程的引脚来动态选择所需要的滤波器。
该传感器的典型输出频率范围从2Hz~500kHz,用户还可以通过两个可编程引脚来选择100%、20%或2%的输出比例因子,或电源关断模式。
输出比例因子使传感器的输出能够适应不同的测量范围,提高了它的适应能力。
当入射光投射到TCS230上时,通过光电二极管控制引脚S2、S3的不同组合,可以选择不同的滤波器;经过电流到频率转换器后输出不同频率的方波(占空比是50%),不同的颜色和光强对应不同频率的方波;还可以通过输出定标控制引脚S0、S1选择不同的输出比例因子,对输出频率范围进行调整,以适应不同的需求。
S0、S1用于选择输出比例因子或电源关断模式;S2、S3用于选择滤波器的类型;OE是频率输出使能引脚,可以控制输出的状态,当有多个芯片引脚共用微处理器的输入引脚时,也可以作为片选信号;OUT是频率输出引脚,GND是芯片的接地引脚,VCC为芯片提供工作电压。
表2是S0、S1及S2、S3的可用组合。
2.2 限位开关的设计限位开关就是用以限定机械设备的运动极限位置的电气开关。
这种开关有接触式的和非接触式的。
接触式的比较直观,机械设备的运动部件上,安装上行程开关,与其相对运动的固定点上安装极限位置的挡块,或者是相反安装位置。
当行程开关的机械触头碰上挡块时,切断了(或改变了)控制电路,机械就停止运行或改变运行。
由于机械的惯性运动,这种行程开关有一定的“超行程”以保护开关不受损坏。
非接触式的形式很多,常见的有干簧管、光电式、感应式等。
材料自动化分拣系统中,气缸回位限位开关、气缸动作限位开关都选用D—C73型号的磁感应开关,控制功率高、作用距离大、结构简单、成本低、工作稳定可靠、寿命长。