自动控制系统中的反馈控制(Feedback Control)
控制系统中前馈控制与反馈控制的区别

控制系统中前馈控制与反馈控制的区别【摘要】文中主要阐述在自动控制系统中前馈控制与反馈控制之间的区别以及内在的联系。
【关键词】前馈控制;反馈控制自动控制系统中主要包含两大类控制,一种是前馈控制,另一种是反馈控制。
在自动控制系统中,反馈控制是闭环控制,所谓的闭环控制是将输出信号反送到控制器的输入端与给定值(给定控制信号)进行比较,得到偏差信号作为控制器的输入信号。
(如何构成的“环路”?对整个控制系统来讲包含两条主要通路信号,一条是从控制器传送到控制对象的前向通道信号,还有一条是从控制对象反馈到控制器输入的反向信号,整个系统构成一个闭和的环路,因此称为闭环)。
前馈控制则是指不存在给定信号与控制对象的输出信号进行比较的过程,直接对控制对象进行控制的一种控制方式,是一种开环的控制方式。
它是在从给定值到控制对象的称为“前向”控制通道上加上控制信号的一种控制方式。
因此称为“前馈”。
前馈控制一般由前馈控制器完成,前馈控制器输出到“前向通道”的信号(作用在控制系统的信号)称为前馈信号。
前馈控制器的输入一般是对系统的某种扰动进行检测和处理后的信号。
那么二者之间究竟有怎么的区别和联系,笔者对此做了以下的见点介绍。
图1 反馈控制框图图2 前馈控制框图上面的两个框图分别是反馈控制框图和前馈控制框图,从图上分析可知二者之间的区别:1.所测量的信号量不同,前馈系统中所测的信号量是干扰量,反馈系统中所测量的信号量是被控变量。
一般反馈控制系统是按照测量值与给定值比较得到的偏差进行调节的,这都属于闭环负反馈调节,其特点是在被控变量出现偏差后才进行调节。
如果干扰已经发生而没有产生偏差,调节器不会进行工作。
所以反馈系统的调节作用落后于干扰作用。
前馈调节是按照干扰作用来进行调节的。
它的特点是把干扰测量出来,直接引入调节装置。
不像反馈控制那样一定要产生偏差后再来调节,所以前馈控制系统能很好的克服干扰的作用。
2.前馈控制根据其特定的控制规律需要用专用调节器,反馈控制一般只需采用通用调节器即可。
自动控制原理常用名词解释
第一章系统:系统泛指由一群有关联的个体组成,根据预先编排好的规则工作,能完成个别元件不能单独完成的工作的群体。
自动控制(Automatic Control):是指在没有人直接参与的情况下,利用外加的设备或装置,使机器、设备或生产过程的某个工作状态或参数自动地按照预定的规律运行。
开环控制(open loop control):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制(closed loop control):凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制Feedback Control系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制(compound control):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
开环控制系统:不将控制的结果反馈回来影响当前控制的系统闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统开环控制系统:是没有输出反馈的一类控制系统。
其结构简单,价格低,易维修。
精度低、易受干扰。
(2.5分)闭环控制系统:又称为反馈控制系统,其结构复杂,价格高,不易维修。
但精度高,抗干扰能力强,动态特性好。
(2.5分)手动控制系统:必须在人的直接干预下才能完成控制任务的系统自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统被控量(controlled variable):指被控对象中要求保持给定值、要按给定规律变化的物理量。
multivariable feedback control -回复
multivariable feedback control -回复为什么多变量反馈控制是重要的。
多变量反馈控制是一种控制系统的设计方法,它可以同时控制多个变量,而不仅仅是一个变量。
在许多工业过程中,我们需要同时控制多个变量,以实现更高的稳定性、性能和效率。
在这篇文章中,我们将探讨为什么多变量反馈控制是如此重要,并逐步介绍该方法的基本原理和应用。
首先,让我们理解多变量反馈控制的基本概念。
在一个典型的工业过程中,可能存在多个要控制的变量,如温度、压力、流量等。
单变量控制方法只能控制一个变量,而不能考虑其他变量之间的相互影响。
然而,这些变量往往是相互依赖的,并且彼此的状态会相互影响。
因此,我们需要一种更综合、更全面的方法来控制这些多变量。
多变量反馈控制可以同时控制多个变量,并且可以根据变量之间的相互关系进行调整。
通过这种方法,我们可以更好地满足系统的性能指标,如快速响应、抗干扰能力和稳定性。
此外,多变量反馈控制还可以减少系统中的冗余控制信号,并提高能源效率,以及操作和维护成本的降低。
在多变量反馈控制系统中,我们使用控制器来根据输入和输出之间的关系来计算响应的输出信号。
这个控制器可以是线性的或非线性的,取决于系统的特性。
常见的多变量控制器包括PID控制器、模糊控制器和模型预测控制器等。
为了实现多变量反馈控制,我们需要建立一个数学模型来描述系统的动态行为。
这个模型可以基于实验数据或物理原理进行建立。
然后,我们使用这个数学模型来设计控制器,并根据实时测量的过程变量进行反馈调整。
通过不断地观察和调整,我们可以达到我们的控制目标。
多变量反馈控制在许多工业领域都有着广泛的应用。
它可以应用于化工、制造、航空、医疗和能源等许多不同的行业,用于控制各种过程,如温度控制、液位控制、速度控制和压力控制等。
在这些应用中,多变量反馈控制可以提高系统的稳定性、响应速度和品质一致性。
除了工业应用,多变量反馈控制还在其他领域具有重要意义。
第一章 反馈控制系统的概念(本)
5 在反馈控制系统中,调节单元根据________的大小和方向,输出一个控制信号。 A.给定位 B.偏差 C.测量值 D.扰动量
6 在反馈控制系统中,设定值如果按照某一函数规律变化,则称为________。 A. 定值控制 B. 程序控制 C.随动控制 D.函数控制
7 在反馈控制系统中,执行机构的输入是________。 A.被控参数的实际信号 C.被控参数的偏差信号 B. 调节器的输出信号 D.被控参数的给定信号
过渡过程 : transient:指自动控制系统在动态中被控量随时间的变化过程。 或者说是从一个平衡态过渡到另一个平衡态的过程。 y
t 平衡状态 平衡 状态 过渡过程
自动控制系统过渡过程曲线
二.控制系统的典型输入信号 为便于系统分析,定义几种常见的系统输入信号:
( 1)阶跃输入: ( 2)速度输入 :
( 3)加速度输入:
( 4)脉冲输入:
( 5)正弦输入: 其中,阶跃输入对系统的工作最为不利。
r(t) R 0 r(t)
r(t)
Rt
t
0 r(t)
t
½ Rt2
0
0
t
t
r(t) 1/h 0 h t 单位脉冲函数
h→0
r(t)
r(t)→∞
0
t
h→0时,称为理想的单 位脉冲函数,记作δ(t)。
三. 评定控制系统动态过程品质的指标
四. 反馈控制系统的分类
1.按所用能源分类:气动控制系统和电动控制系统 2.按仪表的结构形式分类:单元组合仪表和基地式仪表 单元组合仪表:各单元分别制成一台独立仪表 基地式仪表 : 各单元组装成一台仪表 3. 按给定值的变化规律分类:
( a)定值控制;(b)程序控制;(c)随动控制。
自动控制原理常用名词解释知识分享
自动控制原理常用名词解释词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
零点极点 (z ero and pole) :分子多项式的零点(分子多项式的根)称为传递函数的零点;分母多项式的零点(分母多项式的根)称为传递函数的极点。
自动化专业英语词汇表

自动化专业英语词汇表自动化专业是应用一系列科学技术和方法,通过使用自动控制系统和自动装置,使生产过程自动进行的一门学科。
在这个专业中经常会遇到一些与自动化相关的英语词汇,下面是一个自动化专业英语词汇表,供大家参考。
一、控制系统相关词汇1.1 控制系统 - Control System1.2 自动控制 - Automatic Control1.3 反馈控制 - Feedback Control1.4 前馈控制 - Feedforward Control1.5 PID控制 - PID Control1.6 闭环控制 - Closed-loop Control1.7 开环控制 - Open-loop Control1.8 控制器 - Controller1.9 传感器 - Sensor1.10 执行器 - Actuator1.11 控制信号 - Control Signal1.12 输出信号 - Output Signal1.13 输入信号 - Input Signal1.14 控制策略 - Control Strategy1.15 控制精度 - Control Accuracy二、自动化设备相关词汇2.1 自动装置 - Automatic Device 2.2 自动机械 - Automated Machinery 2.3 机器人 - Robot2.4 运动控制 - Motion Control2.5 伺服系统 - Servo System2.6 步进电机 - Stepper Motor2.7 传动装置 - Transmission Device 2.8 传动比 - Gear Ratio2.9 电气驱动 - Electrical Drive2.10 液压驱动 - Hydraulic Drive2.11 气动驱动 - Pneumatic Drive 2.12 PLC程序 - PLC Program2.13 HMI界面 - HMI Interface2.14 人机交互 - Human-Machine Interaction2.15 自动化线 - Automation Line三、控制算法相关词汇3.1 模糊控制 - Fuzzy Control3.2 神经网络控制 - Neural Network Control 3.3 遗传算法 - Genetic Algorithm3.4 自适应控制 - Adaptive Control3.5 模型预测控制 - Model Predictive Control 3.6 最优控制 - Optimal Control3.7 鲁棒控制 - Robust Control3.8 软件开发 - Software Development3.9 编程语言 - Programming Language3.10 程序调试 - Program Debugging3.11 系统优化 - System Optimization3.12 数据采集 - Data Acquisition3.13 实时控制 - Real-time Control3.14 开发工具 - Development Tool3.15 算法设计 - Algorithm Design四、自动化监控相关词汇4.1 监控系统 - Monitoring System 4.2 故障诊断 - Fault Diagnosis4.3 警报系统 - Alarm System4.4 远程监控 - Remote Monitoring 4.5 数据分析 - Data Analysis4.6 数据可视化 - Data Visualization 4.7 运行状态 - Operating Status4.8 故障报警 - Fault Alarm4.9 监控设备 - Monitoring Equipment 4.10 实时监测 - Real-time Monitoring 4.11 数据记录 - Data Logging4.12 故障排除 - Trouble Shooting 4.13 监测指标 - Monitoring Index 4.14 运行参数 - Operating Parameters 4.15 监测报告 - Monitoring Report总结:以上是自动化专业英语词汇表,涵盖了控制系统、自动化设备、算法和监控等多个方面的词汇。
前馈反馈控制系统
前馈—反馈复合控制系统摘要流量是工业生产过程中重要的被控量之一,因而流量控制的研究具有很大的现实意义。
锅炉的流量控制对石油、冶金、化工等行业来说必不可少。
本论文的目的是锅炉进水流量定值控制,在设计中充分利用自动化仪表技术,计算机技术,自动控制技术,以实现对水箱液位的过程控制。
首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。
然后,根据被控对象模型和被控过程特性并加入PID调节器设计流量控制系统,采用动态仿真技术对控制系统的性能进行分析。
同时,通过对实际控制的结果进行比较,验证了过程控制对提高系统性能的作用。
随着计算机控制技术的迅速发展,组态技术开始得到重视与运用,它能够很好地解决传统工业控制软件存在的种种问题,使用户能根据控制对象和控制目的任意组态,完成最终的自动化控制工程。
关键词:流量定值;过程控制;PID调节器;前馈控制;系统仿真目录一.前馈控制1.前馈控制的定义2.换热器前馈控制二.前馈控制的特点及局限性1.前馈控制的特点2.前馈控制的局限性三.反馈控制1.定义2.反馈控制的特点四.复合控制系统特性1.前馈-反馈复合控制原理2.复合控制系统特点五.小结六.参考文献一、前馈控制1.前馈控制的定义前馈控制(英文名称为Feedforward Control),是按干扰进行调节的开环调节系统,在干扰发生后,被控变量未发生变化时,前馈控制器根据干扰幅值,变化趋势,对操纵变量进行调节,来补偿干扰对被控变量的影响,使被控变量保持不变的方法。
2.换热器前馈控制在热工控制系统中,由于控对象通常存在一定的纯滞后和容积滞后,因而从干扰产生到被调量发生变化需要一定的时间。
从偏差产生到调节器产生控制作用以及操纵量改变到被控量发生变化又要经过一定的时间,可见,这种反馈控制方案的本身决定了无法将干扰对被控量的影响克服在被控量偏离设定植之前,从而限制了这类控制系统控制质量的进一步提高。
考虑到偏差产生的直接原因是干扰作用的结果,如果直接按扰动而不是按偏差进行控制,也就是说,当干扰一出现调节器就直接根据检测到的干扰大小和方法按一定规律去控制。
反馈控制
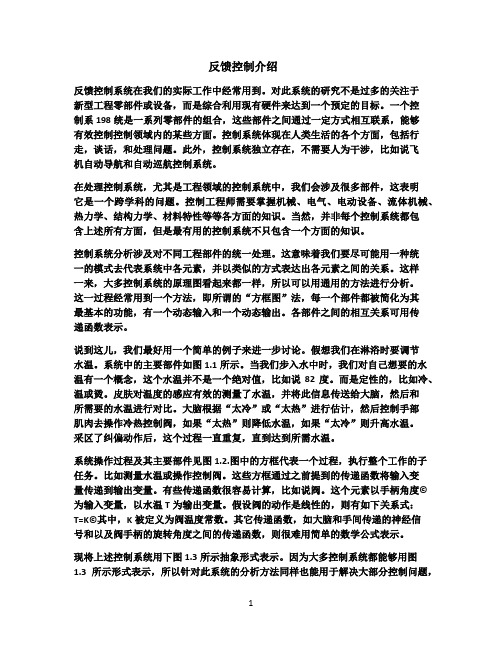
反馈控制介绍反馈控制系统在我们的实际工作中经常用到。
对此系统的研究不是过多的关注于新型工程零部件或设备,而是综合利用现有硬件来达到一个预定的目标。
一个控制系198统是一系列零部件的组合,这些部件之间通过一定方式相互联系,能够有效控制控制领域内的某些方面。
控制系统体现在人类生活的各个方面,包括行走,谈话,和处理问题。
此外,控制系统独立存在,不需要人为干涉,比如说飞机自动导航和自动巡航控制系统。
在处理控制系统,尤其是工程领域的控制系统中,我们会涉及很多部件,这表明它是一个跨学科的问题。
控制工程师需要掌握机械、电气、电动设备、流体机械、热力学、结构力学、材料特性等等各方面的知识。
当然,并非每个控制系统都包含上述所有方面,但是最有用的控制系统不只包含一个方面的知识。
控制系统分析涉及对不同工程部件的统一处理。
这意味着我们要尽可能用一种统一的模式去代表系统中各元素,并以类似的方式表达出各元素之间的关系。
这样一来,大多控制系统的原理图看起来都一样,所以可以用通用的方法进行分析。
这一过程经常用到一个方法,即所谓的“方框图”法,每一个部件都被简化为其最基本的功能,有一个动态输入和一个动态输出。
各部件之间的相互关系可用传递函数表示。
说到这儿,我们最好用一个简单的例子来进一步讨论。
假想我们在淋浴时要调节水温。
系统中的主要部件如图1.1所示。
当我们步入水中时,我们对自己想要的水温有一个概念,这个水温并不是一个绝对值,比如说82度。
而是定性的,比如冷、温或烫。
皮肤对温度的感应有效的测量了水温,并将此信息传送给大脑,然后和所需要的水温进行对比。
大脑根据“太冷”或“太热”进行估计,然后控制手部肌肉去操作冷热控制阀,如果“太热”则降低水温,如果“太冷”则升高水温。
采区了纠偏动作后,这个过程一直重复,直到达到所需水温。
系统操作过程及其主要部件见图1.2.图中的方框代表一个过程,执行整个工作的子任务。
比如测量水温或操作控制阀。
这些方框通过之前提到的传递函数将输入变量传递到输出变量。
自动控制原理常用名词解释
词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
零点极点 (z ero and pole) :分子多项式的零点(分子多项式的根)称为传递函数的零点;分母多项式的零点(分母多项式的根)称为传递函数的极点。
反馈控制系统的特性

E ( s ) 1 R ( s ) G ( s ) T d ( s ) G c ( s ) G ( s )N ( s ) 1 G c ( s ) G ( s ) 1 G c ( s ) G ( s ) 1 G c ( s ) G ( s )
6
二、系统灵敏度定义
系统灵敏度定义为系统传递函数的变化率与对象传递函数(或参数)的变 化率之比。
S T T lnT GG lnG
显然,对开环系统 S=1。闭环系统灵敏度为:
T(s) G(s) 1G(s)H(s)
SG T G TG T[1G 1 H ]2G(1G GH )1G(1 s)H(s)
关于系统灵敏度和鲁棒性的深入讨论见教材第12章。
第三章反馈控制系统的特性feedbackcontrolsystemcharacteristics本章主要内容本章主要内容工程应用本章目标深刻认识误差在系统分析中的重要地位充分理解反馈对消除干扰噪声和参数变化对系统影响的作用理解系统对动态响应和静态响应控制的区别明白反馈的作用和代价参阅教材第4章p15117931反馈控制系统工程应用中的两大类自动控制系统
S (s) 1 1
灵敏度✓ 函C数(s)+S(s)=1,两者不可能同时小,必须折
F (s) 1 L(s)
中。
C (s) L(s) 1 L(s)
灵敏度补✓偿具函体数讲,要有效消除扰动的影响,需要大 的开环增益L(s)或者大的控制器增益Gc(s);
要有效消除噪声影响,必须有小的开环增益
1
G(s)
第三章 反馈控制系统的特性 Feedback Control System Characteristics
反馈控制系统

反馈控制系统:同开环控制系统相比,闭环控制具有一系列优点。
但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。
为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
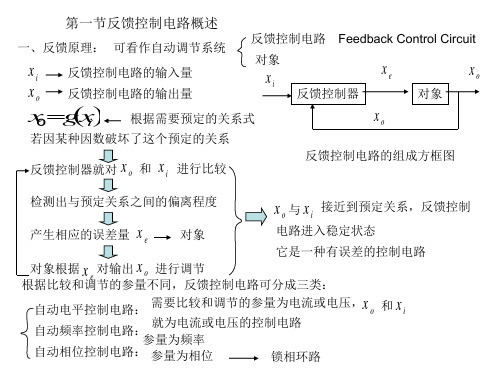
反馈控制系统(即闭环控制系统)是基于反馈原理建立的自动控制系统。
所谓反馈原理,就是根据系统输出变化的信息来进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能。
在反馈控制系统中,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。
因此,反馈控制系统又称为闭环控制系统。
反馈控制是自动控制的主要形式。
在工程上常把在运行中使输出量和期望值保持一致的反馈控制系统称为自动调节系统,而把用来精确地跟随或复现某种过程的反馈控制系统称为伺服系统或随动系统。
反馈控制系统由控制器、受控对象和反馈通路组成(见图)。
图中带叉号的圆圈为比较环节,用来将输入与输出相减,给出偏差信号。
这一环节在具体系统中可能与控制器一起统称为调节器。
以炉温控制为例,受控对象为炉子;输出变量为实际的炉子温度;输入变量为给定常值温度,一般用电压表示。
炉温用热电偶测量,代表炉温的热电动势与给定电压相比较,两者的差值电压经过功率放大后用来驱动相应的执行机构进行控制。
反馈控制系统包括:(一)负反馈(negative feedback):凡反馈信息的作用与控制信息的作用方向相反,对控制部分的活动起制约或纠正作用的,称为负反馈。
即使系统的输出值与目标值的偏差越来越小。
1. 意义:维持稳态2. 缺点:滞后、波动(二)正反馈(positive feedback ):凡反馈信息的作用与控制信息的作用方向相同,对控制部分的活动起增强作用的,称为正反馈意义:加速生理过程,使机体活动发挥最大效应。
即使系统的输出值与目标值的偏差越来越大,正反馈并不是都是好的,有的时候系统需要正反馈的作用。
第六章反馈控制电路
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
multivariable feedback control -回复

multivariable feedback control -回复问题:什么是多变量反馈控制?多变量反馈控制是一种用于控制系统的技术,其中在控制过程中,考虑了多个输入和输出变量之间的相互关系。
传统的控制方法通常只考虑单个输入和输出变量的关系,而多变量反馈控制则允许同时控制多个输入和输出变量,以实现更精确和有效的控制。
多变量反馈控制技术在许多领域得到广泛应用,如机械工程、化学工程和电力工程等。
多变量反馈控制系统是由多个输入和输出变量组成的。
在这个系统中,输入变量是用来控制系统行为的信号,而输出变量则是用来度量系统性能的信号。
多变量反馈控制的目标是通过合理地选择和调整这些输入信号,以实现对输出变量的精确控制。
为了实现这一目标,多变量反馈控制系统采用了传感器来获取输出变量的信息,并将其与期望输出进行比较,然后根据比较结果调整输入信号。
多变量反馈控制系统的核心是控制器。
控制器根据输出变量的反馈信息来生成控制信号,以驱动系统向期望状态靠近。
控制器的设计通常基于控制理论和数学方法,通过对系统建模和分析,确定最佳的控制策略。
常见的多变量控制策略包括模型预测控制(MPC)、最优控制和自适应控制等。
模型预测控制是一种常用的多变量反馈控制策略。
它基于对系统模型的预测来生成控制信号。
在模型预测控制中,系统模型是通过对系统的动态特性进行建模和参数估计得到的。
然后,根据模型预测系统在未来一段时间内的行为,生成最佳的控制信号。
模型预测控制具有灵活性和适应性强的特点,可以应对系统非线性和时变性等挑战。
最优控制是另一种常见的多变量反馈控制策略。
它基于优化理论和数学方法来寻找系统的最优控制策略。
最优控制的目标是使系统的性能指标达到最优,如最小误差、最短时间和最小能量消耗等。
最优控制方法通常涉及求解动态优化问题,其中考虑了系统的约束条件和性能指标。
自适应控制是一种更为复杂的多变量反馈控制策略。
它基于系统的实时反馈信息来调整控制策略,以适应系统的变化和不确定性。
正反馈和负反馈调节的比较

正反馈和负反馈调节体内的控制系统包括非自动控制系统、反馈控制系统和前馈控制系统,但大纲只要求掌握反馈控制系统。
反馈控制系统分负反馈控制系统和正反馈控制系统。
在正常人体内,大多数情况下为负反馈调节。
负反馈控制系统正反馈控制系统比例大多数情况下的控制机制少数情况下的控制机制定义反馈信息与控制信息作用性质相反的反馈反馈信息与控制信息作用性质相同的反馈作用起纠正、减弱控制信息的作用起加强控制信息的作用举例①减压反射②肺牵张反射③动脉压感受性反射④代谢增强时O2及CO2浓度的调节⑤甲亢时TSH分泌减少①排尿反射、排便反射②血液凝固过程③神经纤维膜上达到阈电位时Na+通道开放④分娩过程⑤胰蛋白酶原激活的过程反馈控制系统反馈控制系统(feedback control system)是一种“闭环”系统,即控制部分发出信号,指示受控部分活动,而受控部分的活动可被一定的感受装置感受,感受装置再将受控部分的活动情况作为反馈信号送回到控制部分,控制部分可以根据反馈信号来改变自己的活动,调整对受控部分的指令,因而能对受控部分的活动进行调节。
可见,在这样的控制系统中,控制部分和受控部分之间形成一个闭环联系。
在反馈控制系统中,反馈信号对控制部分的活动可发生不同的影响,从而实现对受控部分活动的调节。
如果经过反馈调节,受控部分的活动向和它原先活动相反的方向发生改变,这种方式的调节称为负反馈(negative feedback)调节;相反,如果反馈调节使受控部分继续加强向原来方向的活动,则称为正反馈(positive feedback)调节。
在正常人体内,绝大多数控制系统都是负反馈方式的调节,只有少数是正反馈调节。
(一)负反馈控制系统当一个系统的活动处于某种平衡或稳定状态时,如果因某种外界因素使该系统的受控部分活动增强,则该系统原先的平衡或稳定状态遭受破坏。
在存在负反馈控制机制的情况下,如果受控部分的活动增强,可通过相应的感受装置将这个信息反馈给控制部分;控制部分经分析后,发出指令使受控部分的活动减弱,向原先的平衡状态的方向转变,甚至完全恢复到原先的平衡状态。
自动化 反馈控制系统的基本概念
?设系统处在平衡状态即系统稳定运行时突然受到一个外部扰动被控量将离开初始稳定值发生变化测量单元将把被控量的实际值送至调节器在调节器内部被控量的给定值与测量值进行比较得到偏差值e调节器依据某种调节作用规律输出一个控制信号通过执行机构改变流入控制对象的物质或能量流量被控量朝着偏差减少的方向变化这一信号又通过测量单元送至调节器重复上述过程最终使被控量又回到给定值或给定值附近系统达到一个新的平衡状态
根据控制系统接受的扰动途径,可以分为两种情 况:一种情况是外部扰动不变,改变给定值(如 随动控制);另一种情况是给定值不变(定值控 制),改变外部扰动。由于控制器控制规律或系 统参数的不同,控制系统的动态过程将表现为不 同的形式。
在阶跃信号输入时,被控量变化的动态过程 有以下四种: (1)发散振荡过程 (2)等幅振荡过程 (3)单调过程(非周期过程) (4)衰减振荡过程
船舶电气与自动化 (船舶自动化)
第五章 反馈控制系统的基础知识
第一节 反馈控制系统的基本概念
一、反馈控制系统的组成
反馈控制系统对机器设备或生产过程参数的控 制过程实际上是直接模拟人的手动操作过程。 例1、辅锅炉水位自动控制系统 例2、主机冷却水温度自动控制系统
主机冷却水温度自动控制系统示意图
在自动控制过程中,由于不需要人来干预控制过程,因此 必须采用相应的自动化仪表来代替人的功能器官。比如可 用温度传感器和变送器来代替人的眼睛,随时测量冷却水 的实际温度并把该值送给调节器。调节器代替人的大脑, 并对冷却水实际温度进行分析和计算,然后输出控制信号 给执机构。执行机构代替人的双手,改变三通调节阀的开 度。不论是手动控制,还是自动控制,反馈的作用都是存 在的。我们把包含反馈作用的控制过程称为反馈控制过程 。