直流电机论文xin
直流电机毕业论文
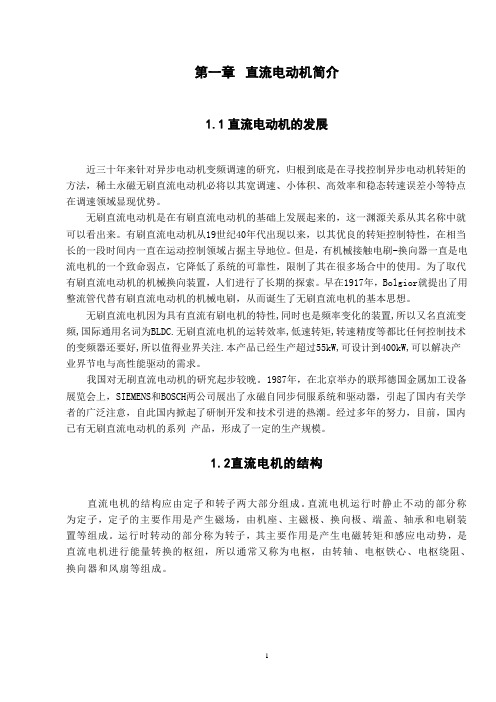
图2.2直流电机的基本工作原理图
对图2.1所示的直流电机,如果去掉原动机,并给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷A流入,经过线圈abcd,从电刷B流出,根据电磁力定律,载流导体ab和cd收到电磁力的作用,其方向可由左手定则判定,两段导体受到的力形成了一个转矩,使得转子逆时针转动。如果转子转到如上图(b)所示的位置,电刷A和换向片2接触,电刷B和换向片1接触,直流电流从电刷A流入,在线圈中的流动方向是dcba,从电刷B流出。
模糊控制不要求被控对象的精确模型且适应性强,为了克服常规数字直流调速装置的缺点,可将模糊控制与PID调节器结合,形成fuzzy-PID复合控制方案,设计能在负载、模型参数的大范围变化以及非线性因素的影响下均可以满足控制稳定转速精度要求的直流电机控制器。[5]
2直流电机的运行原理
2.1直流电机的结构
图2.1直流电机的物理模型图
对于直流调速系统转速控制的要求有稳速、调速、加速或减速三个方面,而在工业生产中对于后两个要求已程应用中稳速指标却往往不能达到预期的效果,稳速要求即以一定的精度在所需要的转速稳定运行,在各种干扰不允许有过大的转速波动。
稳速很难达到要求原因在于数字直流调速装置中的PID调节器对被控对象及其负载参数变化适应能力差。直流电机的数学模型很容易得到,这使得经典控制理论在己知被控对象的传递函数才能进行设计的前提得到满足,大部分数字直流调速控制器就是建立在此基础上的。然而,在实际的传动系统中,电机本身的参数和拖动负载的参数并不如模型那样一成不变,尤其对于中小型电机,在某些应用场合随工况而变化;同时,直流电机本身是一个非线性的被控对象,许多拖动负载含有弹性或间隙等被控对象的参数变化与非线性特性,使得线性常参数PID调节器顾此失彼,不能使系统在各种工况下都能保持设计时的性能指标,往往使得控制系统的鲁棒性差,特别是对于模型参数大范围变化且具有较强非线性环节的系统,常规PID调节器难以满足高精度、快响应的控制要求,常常不能有效克服负载、模型参数的大范围变化以及非线性因素的影响。在工程上,这种控制器就很有可能满足不了生产的需求,如:轧钢工业同轴控制系统、回转窑传动装置、轧辊磨床拖板电控系统等都需要在生产过程中保持稳定的转速要求,而生产负载参数却是随着工况变化的。[7]
无刷直流电机(论文设计)

1 绪论无刷直流电机[1](Brushless DC Motor ,简称BLDCM)用电子换相取代了直流电机的机械换相,把永磁材料做成转子,省去了电刷,因而它具有很强的生命力。
无刷直流电机的驱动电路能比较容易的获得方波,反馈装置简单,功率密度高,输出转矩大,控制结构简单,使得BLDCM的应用比直流电机要广泛得多。
1.1 课题研究目的与意义一个世纪以来,电机作为机电能量转换装置,其应用已遍及国民经济的各个领域以及人们的日常生活中。
众所周知,直流电机具有运行效率高和调速性能好等诸多优点,但是传统的直流电机均采用电刷,以机械方法进行换向,因而存在机械摩擦,由此带来噪声、电火花、无线电千扰以及寿命短等致命弱点,再加上制造成本高及维修困难等缺点,从而大大地限制了它的应用范围,致使目前工农业生产上,大多数采用三相异步电机。
无刷直流电机既具备传统直流电机运行效率高、调速性能好、无励磁损耗的优点,又具有结构简单、运行可靠、维护方便等独特的优势,特别是与传统直流电机相比,无刷直流电机不采用电刷进行换相,因而不存在机械换相带来的诸多缺点,故在许多高科技领域中应用越来越广泛。
在军事装备领域,使用无刷直流电机能更好地满足快响应、高精度的要求。
对常规武器如雷达的天线控制系统、高射武器的自动跟踪系统等,这些随动系统必须具备很高的角速度、角加速度和很高的跟踪精度,快速跟踪和准确定位是两个重要的技术指标,其控制器的好坏直接影响着装备战术技术性能,因此,如何使随动系统具有稳定性好、可靠性高、响应速度快、跟踪精度高等特点成为研究随动系统的关键。
近十年来,用高新技术武装的各种新型武器如战术导弹、隐形飞机、武装直升机等空中武器不断涌现,其目标识别能力、隐蔽程度、目标命中精度均大大提高,这给武器随动系统提出了新的要求。
在民用领域,随着现代电力电子技术、传感器技术、精密机械技术、自动控制技术以及人工智能技术等高新技术的发展,对电动机的要求从过去简单的提供动力发展到精确控制,从而促进了电动机与电子产品紧密结合的机电一体化产品的发展,如激光加工、机器人、数控机床、柔性制造系统等。
无刷直流电机论文(刘志强)

【摘要】永磁无刷直流电动机(BLDC)是随着电机控制技术、电力电子技术和微电子技术的发展而出现的一种新型电机。
它是在有刷直流电动机的基础上发展起来的。
由于无刷直流电动机既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多特点, 因此成为研究热点。
本文以无刷直流电动机(BLDC)为控制对象,应用DSP为微处理器进行了无刷直流电动机控制系统的软硬件设计。
无刷直流电动机控制系统是具有数字化特点的电动机控制系统,通过数字信号处理器与相关模拟电路的组合,成功地实现了对电机控制的数字化处理。
经过实验表明控制系统满足了无刷直流电动机高性能伺服控制所需参数的准确性与实时性要求。
系统硬件采用以TMS320LF2407为处理器;逆变器采用以IGBT构成的全桥电路,并采用光耦3140对其驱动;设计了硬件互锁电路,在硬件上防止逆变器的上桥臂与下桥臂的直通;同时设计了必要的保护电路(包括过流保护、过压保护等保护电路)。
整个系统的硬件设计采取了很多EMC措施,采用控制电路与驱动电路分两块PCB板的设计方法,增强了系统的可靠性。
系统软件采用C语言编写的程序,整个控制系统软件将采用主程序、服务子程序和中断子程序所组成。
主程序完成芯片初始化、变量的初始化等。
服务子程序完成A/D转换、键盘扫描、数字PI控制、软件换相、PWM产生等。
【关键词】无刷直流电动机DSP数字化处理伺服控制【Abstract】Brushless Direct Current Motor is a new type motor which developed on base of Direct Current Motor due to the advancement of the power electronics 、motor control technology and microprocessor . Because this type of motor not only have the merit of the AC induction motor for simple structure、reliable operation and easy upholding but also have the merit of the Direct Current Motor for high performance、no lose and easy control. the research and application of it has draw lots of attention of the researchers in this field in resent years.The design use Brushless Direct Current Motor as an object, completing the design of high performance control system of BLDC based on DSP. The system has the characteristic of digital motor control ,Via assembled DSP and analogue circuit accomplishing the digital control of motor. Experimentation indicates the system fulfill the demand of veracity and real time for the high performance servo control system of BLDCThe hardware of the system use the TMS320LF2407 as the microprocessor; the converters is made of the IGBT to form the bridge circuit and the drive circuit is made of the optocouple. In order to avoid the direct shoot of the bridge the design also consider the protection of it and the protection circuit is offeredin the design. Many EMC method is adopted throughout the design of hardware.The C program is offered here .The structure of the software of the whole design is made of the main program、subprogram and interrupt program . main program finish the initiation of the chip and variable of the program. The interrupt program and subprogram finished the tasks of A/D transform、the scan of the keyboard 、digital PI control、the converting of the phase and PWM generating edc .【Key Words】Brushless Direct Current MotorDSPdigital control of motorservo control system目录第1章绪论-5-1.1 引言 (5)1.2无刷直流电动机国内外研究概况 (6)1.3 无刷直流电动机的基本组成环节 (8)1.4 无刷直流电动机的基本工作原理 (10)1.5 磁极位置信号的检测 (10)1.6 本论文的主要工作.................. 错误!未定义书签。
直流电机控制电路论文
直流电机控制电路摘要:随着时代的发展,数字电子技术已经普及到我们生活,工作,科研,各个领域,此文将介绍一种直流电机,详细阐述了用单片机输出口所给占空比的不同实现电机的调速的设计方法;着重讨论L298用于电机驱动时特有的优势。
直流电机调速具有相当的实际意义。
依据其调速的基本理论,本电路由模拟电源、控制电路、显示电路、驱动电路四部分组成。
准确说就是模拟电源提供各个芯片电源、数码管、驱动L298所需电压;显示电路用于显示电动机转动时的速度大小及正反转所表示的代码。
与传统的电动机调速相比具有操作方便,以及其输出速度大小采用数码显示的特点。
文章中介绍了Protel 99发展及特点。
直流电动机的工作原理、基本组成环节,电路分析、特殊元器件简介,设计方案的提出,更进一步说明了这类电机的好处。
着重利用软件Protel绘制出电路原理图。
讨论了目前研究工作中存在的问题,并对其发展的方向进行了展望,给出了一些个人的观点。
关键词:单片机AT89C51 ;驱动L298;555定时器;直流电机;DC motor control circuitsAbstract:Along with the development of the ages, the numerical electronics technique has already make widely available to our life, work, research, each realm, this text will introduce a kind of DC motor control circuits。
Elaborated with a microcontroller outputs are different to the duty cycle of the motor speed control circuit design; Focus on L298 for motor drive at the unique advantage,and DC Motor Speed Control has considerable practical significance. According to its governor's basic theory, the power supply circuit from analog control circuits, display circuit, the driving circuit four components. Is that accurate simulation of power supply for each chip, digital control, drives L298 required voltage; Show circuit for the motor rotation speed and size reversion expressed by the code. With the traditional motor speed compared with convenient operation and the size of the output speed digital display features. DC motor principle, the basic components, circuit analysis, special briefings components, design program, is further illustrated by the benefits of these motors. Protel software focused on the use of mapping circuit schematics. Discussion of the current research work is the problem and the direction of its development of the prospect, give some personal views.Keyword:SCM AT89C51 L298 555 motor control目录一、系统设计、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、11.1 方案论证与选择、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、21.2单元电路设计、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、2二、实际电路设计、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、22.1原理图、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、22.2工作原理与过程、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、32.3理论计算与主要芯片的说明与运用、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、42.4软件设计与测试、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、6三.电路测试3..1测试原理、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、103.2测试仪器、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、113.3结果与误差分析、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、12四、结论、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、12五、参考文献、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、12六、仪器仪表、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、12七.附录、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、12 元器件清单一、系统的设计1.1 方案论证与选择方案一:通过电压的大小来控制电机的转动速度;根据电动机在其额定电压时,电动机有一定的额定转速。
直流无刷电机驱动技术的研究(论文)

摘要随着现代电力电子技术的发展和永磁材料性能的不断提高,无刷直流电动机的系统在高性能运动控制领域越来越受到重视。
无刷直流电动机既具有直流电动机运行效率高、调速性能好、无励磁损耗等诸多特点,又具备交流电动机的运行可靠、结构简单、维护方便等一系列优点,在国民经济各个领域的应用日益普及。
本文在对无刷直流电动机控制系统的发展及应用综述的基础上,详细的介绍了无刷直流电动机的基本结构、工作原理和运行特性,并给出了其数学模型。
简述了无刷直流电动机的控制策略,并分析了无位置传感器控制技术的原理和方法。
然后对无刷直流电动机双闭环控制系统的硬、软件设计作了详细论述。
系统以 TI 公司的 TMS320LF2407 芯片为控制核心,分析了 PWM 信号的产生分配情况,给出反电动势过零点、速度及电流等检测电路设计,并以 IR2130 作为驱动芯片设计了无刷直流电动机的驱动电路,采用三段式起动方式来起动电动机。
系统的软件采用模块化设计方法,主要包括初始化程序、起动子程序、换相子程序、ADC 中断服务程序等。
最后运用 SIMULINK 建立了无刷直流电动机控制系统的仿真模型,并对给定实例进行仿真。
本论文所述无刷直流电动机控制系统的设计方案,可以获得良好的速度控制性能,而且 DSP 技术不仅使系统获得了高精度,高可靠性,还简化了系统结构。
:关键词:无刷直流电动机 PWM 控制无位置传感器仿真AbstractWith the development of power electronics technology and ceaseless advance of permanent magnet material, Brushless DC motor (BLDCM) is more and more attention in the field of high performance motion control. BLDCM has been widely used in the various fields of the national economy because this motor not only has the merit of the DC motor for high efficiency, good performance and no excitation loss etc. but also has the merit of the AC induction motor for reliable operation, simple structure and easy maintenance etc.On the basis of the summary for developments and applications of BLDCM control system,the thesis introduces the structure, running principle, operational characteristics and mathematical model of BLDCM. It outlines BLDCM control strategy, and discusses the principles and methods of the control technology with no position sensor detection. Then the hardware and software design of the double closed loop control system is dissertated in detail.The controller of the hardware of the system is built by using the TMS320LF2407 as the microprocessor. It analyses the formation of PWM signals and designs the circuit of BEMF-zero-crossing, velocity and current detection. This system chooses syllogism jump-start motor. Besides, the drive circuit of the BLDCM is designed with IR2130. System software is modular in design methods, Including initialization, starting, commutation subroutine, ADC interrupt service procedures. Finally, it established a BLDCM control system simulation model by SIMULINK, and simulate to the case model.This thesis described the design options about BLDCM control system,It can get a good performance of Speed control; DSP technology enables the system has not only a high-precision,high reliability, also simplifies the system architecture.Keywords:Brushless DC motor PWM No position sensor Simulation目录第1章概述................................................... - 1 -1.1 无刷直流电机的现状....................................... - 1 -1.2 电无刷直流电动机的概况................................... - 2 -1.2.1 无刷直流电动机的特点和应用......................... - 2 -1.2.2 发展前景........................................... - 3 -1.3 本设计的主要工作......................................... - 4 -第2章无刷电机控制系统分析..................................... - 5 -2.1 无刷直流电动机的基本结构................................. - 5 -2.1.1 电动机本体电动机本体............................... - 6 -2.1.2 转子位置检测器..................................... - 6 -2.1.3 电子换相........................................... - 7 -2.2 无刷直流电动机的工作原理................................. - 7 -2.3 直流电动机的PWM调速原理................................. - 9 -第3章无刷直流电机控制器硬件设计.............................. - 11 -3.1 无刷直流电动机双闭环调速系统............................ - 12 -3.2 SPWM 控制技术........................................... - 14 -3.2.1 SPWM控制的基本原理................................ - 14 -3.2.2 SPWM的数学模型.................................... - 14 -3.3 无刷直流电动机无位置传感器的检测方法.................... - 15 -3.3.1 反电动势过零检测法................................ - 16 -3.3.2 续流二极管间接检测法.............................. - 17 -3.3.3 反电动势积分法.................................... - 17 -3.3.4 反电动势三次谐波检测法............................ - 18 -3.4 数字PID控制器及算法.................................... - 19 -3.4.1 模拟PID控制原理.................................. - 19 -3.4.2 PID算法的数字实现................................. - 20 -第4章无刷直流电动机的DSP 控制系统.......................... - 22 -4.1 DSP的结构和特点........................................ - 22 -4.1.1 DSP在运动控制领域的应用........................... - 22 -4.1.2 TMS320LF2407结构和特点............................ - 23 -4.2 无刷直流电动机的DSP控制系统的设计...................... - 25 -4.2.1 PWM波形的产生..................................... - 26 -4.2.2 转子位置的检测.................................... - 28 -4.2.3 速度检测与调节.................................... - 29 -4.2.4 电流检测与调节.................................... - 31 -4.2.5 异步串行通讯接口电路.............................. - 31 -4.2.6 电动机的驱动电路.................................. - 33 -4.3 基于DSP的无位置传感器无刷直流电动机的起动.............. - 34 -4.3.1 位置型PID算法程序的设计.......................... - 34 -4.3.2 数字PI速度调节器设计............................. - 36 -4.3.2 数字PI速度调节器设计............................. - 37 -第五章无刷直流电动机控制系统的软件设计........................ - 38 -5.1 主程序结构.............................................. - 39 -5.2 电动机启动子程序........................................ - 40 -5.3 换相子程序.............................................. - 40 -5.4 ADC中断子程序.......................................... - 41 -总结.......................................................... - 44 -致谢.......................................................... - 45 -参考文献........................................................ - 46 -第1章概述1.1 无刷直流电机的现状有刷直流电动机作为最早的电动机广泛应用于工农业生产的各个领域,由于其宽阔而平滑的优良调速性能,在需要调速的应用领域占有重要地位,但机械换向装置的存在,限制了其发展和应用范围。
直流无刷电动机原理及应用论文
直流无刷电动机原理及应用论文直流无刷电动机(Brushless DC Motor,BLDC)是一种基于电子通断器件控制电机旋转方向和速度的电动机。
相比于传统的直流有刷电动机,BLDC电动机具有更高的效率、更长的寿命、更低的噪音和更高的可靠性等优势,在各个领域得到广泛的应用。
本文将重点探讨BLDC电动机的工作原理和应用。
首先,BLDC电动机的工作原理。
BLDC电动机由定子和转子两部分组成。
定子上包含若干个线圈,并按照一定的序列连接在一起,形成一个三相对称的定子线圈组。
转子上则安装有永磁体,在齿轮上切割一定数量的磁极,使得转子上每个磁极的极性均相邻两个相同。
当BLDC电动机通电时,通过外部电子通断器件按照一定的顺序控制定子线圈的通断,从而形成一个旋转的磁场。
转子上的磁极受到这个旋转的磁场作用,从而顺应旋转运动,带动负载旋转。
BLDC电动机的应用非常广泛。
首先,在家用电器中,BLDC电动机被广泛应用于洗衣机、空调、冰箱等领域。
由于BLDC电动机具有高效、低噪音的特点,使得家用电器具有更好的性能和用户体验。
其次,在汽车领域,BLDC电动机被应用于新能源汽车、电动自行车等交通工具中。
BLDC 电动机通过电能转换为机械能,实现车辆的驱动,提高了汽车的能源利用率和环境友好性。
再次,在工业生产中,BLDC电动机被广泛应用于机械设备、工业机器人等领域。
BLDC电动机具有高效、精准的控制性能,提高了工业设备的生产效率和可靠性。
最后,在航空航天工程中,BLDC电动机被应用于航空器、卫星等航天器件中。
BLDC电动机具有体积小、重量轻、噪音低等特点,适用于空间有限的环境。
当然,BLDC电动机也存在一些挑战和发展方向。
首先,电子通断器件的性能和可靠性对BLDC电动机的工作效果至关重要。
当前,有关电子通断器件的研发和改进仍然是一个热门领域,需要进一步提升其性能和可靠性。
其次,BLDC电动机的功率密度和散热问题也需要解决。
随着电动车等领域对BLDC电动机功率需求的增加,如何在减小体积的同时提升功率密度和散热效果,是一个需要注意的问题。
电动车无刷直流电机毕业设计论文

电动车无刷直流电机毕业设计论文The final edition was revised on December 14th, 2020.摘要近年来,燃油交通工具因尾气排放问题已造成城市空气的严重污染。
于是发展绿色交通工具已经成为一个重要的课题。
考虑到我国的国情,发展电动自行车具有重要的环保意义。
随着电机技术及功率器件性能的不断提高,电动自行车的控制器发展迅速。
本文设计采用无刷直流电机专用控制芯片MC33033为控制芯片,以功率器件MOSFET为开关器件驱动电机,实现对无刷直流电机的控制。
设计出了电路原理图、印制板电路图和电路板实物的3维效果图。
关键词:无刷直流电机 MC33033 原理图印制板电路图AbstractIn recent years, transportation fuel emission problem has been caused by urban air pollution levels. So the development of green transport has become an important issue. Taking into account China's national conditions, development of electric bicycles has important environmental significance. With the motor technology and continuously improve the performance of power devices, the rapid development of electric bicycle controller. This design uses a brushless DC motor for the control of dedicated control chip MC33033 chip, in order to power MOSFET devices as the switching device drive motor, to achieve control of the electric bike. Design a circuit diagram, PCB circuit diagrams and circuit board real 3-D renderings.Keywords:brushless DC motor MC33033 Schematic PCB circuit目录摘要............................................ 错误!未定义书签。
直流无刷电机 论文

华东交通大学理工学院east China jiaotong university institute of technology课程论文题目直流无刷电机的应用及发展前景学院专业班级姓名 xxx学号指导老师二○一二年五月二十三日目录一直流无刷电机在广告灯箱中的应用 (3)二直流无刷电机优越性 (4)三国内直流无刷电机使用与开展情况 (5)四直流无刷电机的使用范畴 (6)五展望国内直流无刷电机的前景 (7)六结论 (8)直流无刷电机的应用及发展前景一.直流无刷电机在广告灯箱中的应用广告灯箱无刷直流电机由电机主体和驱动器组成,是一种典型的机电一体化产品。
电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。
电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。
驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
中小容量的无刷直流电动机的永磁体,现在多采用高磁能积的稀土钕铁硼(Nd-Fe-B)材料。
因此,稀土永磁无刷电机的体积比同容量三相异步电动机缩小了一个机座号。
无刷直流电机因为具有直流有刷电机的特性,同时也是频率变化的装置,所以又名直流变频,国际通用名词为BLDC.无刷直流电机的运转效率,低速转矩,转速精度等都比任何控制技术的变频器还要好,所以值得业界关注。
本产品已经生产超过55kW,可设计到400kW,可以解决产业界节电与高性能驱动的需求。
二直流无刷电机优越性1、全面替代直流电机调速、全面替代变频器+变频电机调速、全面替代异步电机+减速机调速;2、可以低速大功率运行,可以省去减速机直接驱动大的负载;3、具有传统直流电机的所有优点,同时又取消了碳刷、滑环结构;4、转矩特性优异,中、低速转矩性能好,启动转矩大,启动电流小;5、无级调速,调速范围广,过载能力强;6、体积小、重量轻、出力大;7、软启软停、制动特性好,可省去原有的机械制动或电磁制动装置;8、效率高,电机本身没有励磁损耗和碳刷损耗,消除了多级减速耗,综合节电率可达20%~60%,仅节电一项一年可收回购置成本;9、可靠性高,稳定性好,适应性强,维修与保养简单;10、耐颠簸震动,噪音低,震动小,运转平滑,寿命长;11、没有无线电干扰,不产生火花,特别适合爆炸性场所,有防爆型;12、根据需要可选梯形波磁场电机和正旋波磁场电机三国内直流无刷电机使用与开展情况当前,我国直流无刷电机的开展正处于加快开展期。
直流电机调速论文

直流电机调速论文1、课题背景随着时代的进步和科技的发展,电机调速系统在工农业生产、交通运输以及日常生活中起着越来越重要的作用,因此,对电机调速的研究有着积极的意义.长期以来,直流电机被广泛应用于调速系统中,而且一直在调速领域占居主导地位,这主要是因为直流电机不仅调速方便,而且在磁场一定的条件下,转速和电枢电压成正比,转矩容易被控制;同时具有良好的起动性能,能较平滑和经济地调节速度。
因此采用直流电机调速可以得到良好的动态特性。
由于直流电动机具有优良的起、制动性能,宜与在广泛范围内平滑调速。
在轧钢机、矿井卷机、挖掘机、金属切削机床、造纸机、高层电梯等领域中得到广泛应用。
近年来交流调速系统发展很快,然而直流控制系统毕竟在理论上和在时间上都比较成熟,而且从反馈闭环控制的角度来看,它又是交流系统的基础,长期以来,由于直流调速系统的性能指标优于交流调速系统。
因此,直流调速系统一直在调速系统领域内占重要位置。
2、课题功能本次课程设计主要是设计一个直流电机的驱动电路,在给定速度后,当负载变化时,速度是稳定的,构建一个闭环的控制系统。
本论文介绍了基于ATmega16单片机来实现最优PID控制的直流脉冲(PWM)调速系统,并且详细论述了该系统的控制方法、结构、参数设计、程序设计等方面的问题。
该系统结构简单,调速性能好,性能价格比高,真正实现了直流调速系统的高精度控制。
3、系统设计3.1设计要求设计一个直流电机的驱动电路,在给定速度后,当负载变化时,速度是稳定的,构建一个闭环的控制系统。
3.2总体设计方案3.2.1设计思路题目要求设计一个直流电机的驱动电路,系统可以分为控制部分和显示部分。
设计中采用ATmega16芯片为主控制核心,行列式键盘为控制部分,显示部分采用液晶LCM1602显示。
通过单片机软件产生PWM波来控制电机,经过测速电路和PID算法,实现电机速度的实时测量反馈和调节。
3.2.2方案论证与设计1、系统控制设计方案论证与选择方案一:采用MCS-51系列的单片机和专用的PWM芯片及外部D/A转换电路,同时结合PID算法实现实时控制。
(毕业论文)永磁无刷直流电机论文
小功率永磁无刷直流电动机的设计和仿真研究摘要永磁无刷直流电动机是把电机、电子和稀土材料的高新技术产品发展紧密的结合在一起的新型电机,它具有单位体积转矩高、重量轻、转矩惯量小、控制简单、能耗少和调速性能好等优点,因而在航天航空、数控机床、机器人、汽车、计算机外围设备、军事等领域及家用电器等方面都获得了广泛的应用。
因此,设计性能优异的永磁无刷直流电机具有重要的理论意义和应用价值。
本论文系统的研究了35w小功率永磁无刷直流电机的本体设计,包括设计方法、有限元分析、性能计算、软件仿真等。
本文主要的研究内容如下:1、综述了永磁无刷直流电机的研究现状、存在问题和发展前景,分析了永磁无刷直流电机的基本理论。
2、建立永磁无刷直流电机的数学模型,先利用解析法对该电机进行电磁设计,然后利用有限元法对电机进行优化。
3、基于星形连接三相三状态的控制电路,利用Infolytic公司的MagNet电磁场分析软件建立了永磁无刷直流电机的有限元分析模型,仿真分析其静态气隙磁场分布及动态带负载时的电机特性。
并将软件仿真所得结果与设计计算结果进行比较分析,验证了设计方法的正确性。
关键词:电机设计,无刷直流电动机,有限元分析,稳态特性第一章绪论1.1永磁无刷直流电动机的发展状况永磁无刷直流电动机是一种新型的电动机,其应用广泛,相关技术仍然在不断的发展中,该类电动机的发展充分体现了现代电动机理论、电力电子技术和永磁材料的发展过程。
其中,永磁材料、大功率开关器件、高性能微处理器等的快速发展对永磁无刷直流电动机的进步功不可没。
1821年9月,法拉第建立的世界上第一台电机就是永磁电机,自此奠定了现代电机的基本理论基础。
十九世纪四十年代,人们研制成功了第一台直流电动机。
1873年,有刷直流电动机正式投入商业应用。
从此以后,有刷直流电动机就以其优良的转矩特性在运动控制领域得到了广泛的应用,占据了极其重要的地位。
随着生产的发展和应用领域的扩大,对直流电动机的要求也越来越高。
直流电机PWM调速系统参考论文
毕业论文基于51单片机的直流电机PWM调速控制系统设计所在学院专业名称年级学生、学号指导教师、职称完成日期摘要本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。
本文中采用了三极管组成了PWM信号的驱动系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。
另外,本系统中使用了霍尔元件对直流电机的转速进行测量,经过处理后,将测量值送到液晶显示出来。
关键词:PWM信号,霍尔元件,液晶显示,直流电动机I目录目录 (III)1 引言 (1)1.1 课题背景 (1)1.1.2 开发背景 (1)1.1.3 选题意义 (2)1.2 研究方法及调速原理 (2)1.2.1 直流调速系统实现方式 (4)1.2.2 控制程序的设计 (5)2 系统硬件电路的设计 (6)2.1 系统总体设计框图及单片机系统的设计 (6)2.2 STC89C51单片机简介 (6)2.2.1 STC89C51单片机的组成 (6)2.2.2 CPU及部分部件的作用和功能 (7)2.2.3 STC89C51单片机引脚图 (8)2.2.4 STC89C51引脚功能 (8)3 PWM信号发生电路设计 (11)3.1 PWM的基本原理 (11)3.2 系统的硬件电路设计与分析 (11)3.3 H桥的驱动电路设计方案 (12)5 主电路设计 (14)5.1 单片机最小系统 (14)5.2 液晶电路 (14)5.2.1 LCD 1602功能介绍 (15)5.2.2 LCD 1602性能参数 (16)5.2.3 LCD 1602与单片机连接 (18)5.2.4 LCD 1602的显示与控制命令 (19)5.3 按键电路 (20)5.4 霍尔元件电路 (21)III5.4.1 A3144霍尔开关的工作原理及应用说明 (22)5.4.2 霍尔传感器测量原理 (23)6 系统功能调试 (24)总结 (25)致谢 (26)参考文献 (27)IV1 引言1.1 课题背景开发背景在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
电机论文 (2)

电机论文引言电机是一种将电能转化为机械能的设备,广泛应用于各个领域,如工业制造、交通运输、家庭电器等。
随着技术的不断发展,电机的性能和效率也在不断提高。
本论文旨在研究电机的原理、分类、应用和未来发展方向,旨在为电机的设计和使用提供理论依据。
电机原理电机的原理基于电磁感应现象,即通过电流在磁场中产生力的相互作用。
电机主要包括定子和转子两个部分,其中定子是由导线绕制而成的电磁线圈,而转子则是通过电源提供的电流在磁场中产生的力而转动。
电机的工作原理可以用法拉第电磁感应定律描述,即当导体在磁场中运动时,会产生电势差。
电机分类根据电机的工作原理和结构特点,电机可以分为多种类型,如直流电机、交流电机、无刷电机等。
下面将对常见的几种电机进行简要介绍。
直流电机是最基本也是最常见的一种电机,其工作原理与法拉第电磁感应和电磁力学基本规律密切相关。
直流电机依靠直流电源提供稳定的电流,在磁场中产生力而转动。
它具有结构简单、转速可调节、响应速度快等优点,被广泛应用于小型家电和低功率设备。
交流电机交流电机是通过交变电流产生的磁场力而转动的电机。
它分为异步电机和同步电机两种类型。
异步电机是工业中最常见的一种电机,它结构简单,容易制造和维护。
同步电机则在频率和极对数相等的情况下运转,通常用于要求更高稳定性和精度的设备,如工业设备和机器人。
无刷电机无刷电机是近年来发展起来的一种新型电机,它采用电子控制器而不是传统的机械刷子来控制电流的导向。
无刷电机具有高效率、低噪音、寿命长等优点,被广泛应用于新能源车辆、无线工具、家电等领域。
电机在各个领域都有广泛的应用。
下面列举了几个常见的应用领域。
工业制造在工业制造过程中,电机被广泛用于驱动各种机械设备,如机床、输送带、风扇等。
电机的高效率、可调节性和精准控制能力使其成为工业生产中必不可少的设备。
交通运输电机在交通运输领域也有重要应用,如电动汽车、高速电动列车等。
电机的高效率和低碳排放使其成为替代传统燃油驱动的重要选择。
直流电动机毕业论文
第一章直流电动机简介1.1直流电动机的发展近三十年来针对异步电动机变频调速的研究,归根到底是在寻找控制异步电动机转矩的方法,稀土永磁无刷直流电动机必将以其宽调速、小体积、高效率和稳态转速误差小等特点在调速领域显现优势。
无刷直流电动机是在有刷直流电动机的基础上发展起来的,这一渊源关系从其名称中就可以看出来。
有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。
但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
无刷直流电机因为具有直流有刷电机的特性,同时也是频率变化的装置,所以又名直流变频,国际通用名词为BLDC.无刷直流电机的运转效率,低速转矩,转速精度等都比任何控制技术的变频器还要好,所以值得业界关注.本产品已经生产超过55kW,可设计到400kW,可以解决产业界节电与高性能驱动的需求。
我国对无刷直流电动机的研究起步较晚。
1987年,在北京举办的联邦德国金属加工设备展览会上,SIEMENS和BOSCH两公司展出了永磁自同步伺服系统和驱动器,引起了国内有关学者的广泛注意,自此国内掀起了研制开发和技术引进的热潮。
经过多年的努力,目前,国内已有无刷直流电动机的系列产品,形成了一定的生产规模。
1.2直流电机的结构直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕阻、换向器和风扇等组成。
毕业论文-直流电机控制

Tem直流电机的机械特性
图 2.3 表示了直流电机的不同的机械特性,其中曲线○1 和○2 表示了在不
同的控制电压下电机的不同的机械特性,他们是一组平行线,随着控制电压
的升高曲线族往右平移;曲线○2 和○3 表示了不同硬度的机械特性,它表明
电机的转速受负载转矩变化的影响,曲线下倾的越快,表明其硬度越小,相 应的电机转速受负载转矩变化的影响越大。一般来说,在自控系统中都希望
件的导通与关断的时间进行控制,控制占空比 α (在一个周期里,开关管导
通的时间与周期的比值)的大小,使得直流电机两端的电压平均值改变,从 而达到对直流电机的调速的目的。
对于软件设计方面,将会采用模块化设计,使得整个控制系统的软件程 序简洁明了。对直流电机调速的控制算法采用增量式 PID 算法,只需知道几 个偏差值就能很好的对直流电机进行调速控制。
直流电机总体可以分成两大部分,定子(静止部分)和转子(旋转部分)。
6
定子由定子铁心、励磁绕组或永磁体、机壳、端盖和电刷装置等组成。转子 由电枢铁心、电枢绕组、转向器、轴、风扇等组成,其中风扇是用来改善冷 却条件的。一般的小型电机的轴是通过滚动轴承支承在两端的短盖上的。直 流电机的基本结构示意图如图 2.2 所示。
1.3 单片机的发展及应用
1.3.1 单片机的发展及特点
单片机(Single-Chip-Microcomputer)又称微控制器(Microcontroller), 其最基本的结构是将 CPU 和计算机外围功能单元,如存储器、I/O 口、定时 器/计数器、中断系统等集成在一个芯片上构成的。虽然单片机只是一个小芯 片,但无论从组成还是从功能上看,它都具备了微机系统的特征。
1.4 本文研究的主要工作
本次毕业设计主要是以单片机位控制核心,加上必要的直流电机的控制 电路,组成基于单片机的直流电机控制系统。主要完成几部分的工作:一是 对控制系统的硬件进行设计;二是对控制系统进行软件程序设计;三是进行 整体的调试。
毕业设计论文电动车无刷直流电机
毕业设计论文电动车无刷直流电机
电动车无刷直流电机是目前电动车领域中最主流的电机类型之一、它
采用无刷直流电机技术,具有高效率、高性能和低噪音等优点。
本文将从
原理、结构、控制和应用等方面综述电动车无刷直流电机的相关内容。
一、无刷直流电机的原理
无刷直流电机是一种基于电磁学原理工作的电机。
它采用永磁体在转
子上形成永磁场,驱动定子上的绕组与永磁场之间相互作用,实现电能转
化为机械能的过程。
二、无刷直流电机的结构
无刷直流电机主要由转子、定子和控制系统组成。
转子部分包括轴、
永磁体和换向器;定子部分包括绕组和磁铁;控制系统负责监控电机的运
行状态和控制电机的转速。
三、无刷直流电机的控制
无刷直流电机的控制主要通过控制系统中的换向器来实现。
换向器根
据转子位置和速度信号,调整绕组通电顺序,使电机保持平稳运行。
同时,控制系统还可以通过调整电压和电流来控制电机的转速和扭矩。
四、无刷直流电机的应用
无刷直流电机广泛应用于电动车领域。
它具有高效率、高性能和低噪
音等优点,可以提供稳定可靠的动力输出。
同时,无刷直流电机还具有较
快的响应速度和较高的功率密度,适用于多种电动车型。
总结起来,电动车无刷直流电机是一种高效、高性能的电机技术,具有广泛的应用前景。
未来,随着技术的不断发展,无刷直流电机将继续在电动车领域发挥重要作用。
直流电机转速控制器毕业论文
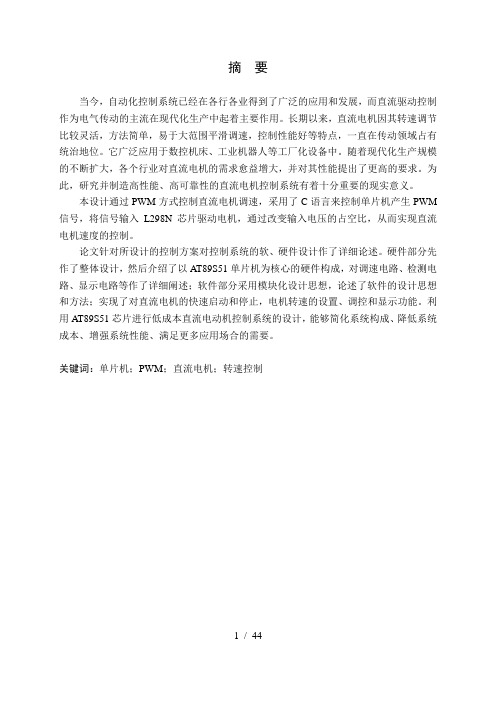
当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流驱动控制作为电气传动的主流在现代化生产中起着主要作用。
长期以来,直流电机因其转速调节比较灵活,方法简单,易于大范围平滑调速,控制性能好等特点,一直在传动领域占有统治地位。
它广泛应用于数控机床、工业机器人等工厂化设备中。
随着现代化生产规模的不断扩大,各个行业对直流电机的需求愈益增大,并对其性能提出了更高的要求。
为此,研究并制造高性能、高可靠性的直流电机控制系统有着十分重要的现实意义。
本设计通过PWM方式控制直流电机调速,采用了C语言来控制单片机产生PWM 信号,将信号输入L298N芯片驱动电机,通过改变输入电压的占空比,从而实现直流电机速度的控制。
论文针对所设计的控制方案对控制系统的软、硬件设计作了详细论述。
硬件部分先作了整体设计,然后介绍了以AT89S51单片机为核心的硬件构成,对调速电路、检测电路、显示电路等作了详细阐述;软件部分采用模块化设计思想,论述了软件的设计思想和方法;实现了对直流电机的快速启动和停止,电机转速的设置、调控和显示功能。
利用AT89S51芯片进行低成本直流电动机控制系统的设计,能够简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。
关键词:单片机;PWM;直流电机;转速控制1 / 44Nowadays, automatic control system has been widely used and greatly developed in all walks of life. As the dominant part of electric drive, direct current (DC) control plays an important role in modern production. For a long time, DC motors hold a dominant position in transmission field with the characteristics of more flexible and simple speed adjustment, smoothly timing in a large scale, and good control performance. DC motors are widely used in factory equipment of numerical control machine, industrial robot, etc. With the constant expansion of modern production, the demand for DC motors is increased and a higher request is put forward. Thus, it is of great practical significance to research and make a high performance and reliability DC motor control system.The design controls DC motors speed regulation through the method of PWM, uses C language to control the microcontroller and then generates PWM signals. It is to input the signals into L298N drive chip, by using the control method of changing the duty ratio of the input voltage, and then make the DC motor speed control come true.The paper makes a detailed discussion on software and hardware of controlling system on the basis of the designed control system. After a dissertation on the whole design of, hardware structure with AT89S51 microcontroller as the core is introduced, and then speed control circuit, detection circuit and display circuit are expounded. In the part of software, module idea is adopted, the design idea and method is discussed and setting, start, stop, controlling and display functions of the DC electrical motor rotation parameters are achieved. The design of using AT89S51 chip to do low cost DC electrical motor control system can simplify system structure, reduce system cost, enhance system performance and meet more application needs.Key words:microcontroller; PWM; DC electrical motor; speed control1 / 44目录引言 (1)1 总体方案设计 (1)1.1任务要求 (1)1.2 方案论证 (1)1.2.1电机调速控制模块的选择方案 (1)1.2.2电机测速模块的选择方案 (2)1.2.3电机转速显示模块的选择方案 (2)1.2.4控制器的选择方案 (3)1.3 总体方案选择 (3)2 硬件电路的设计 (4)2.1 AT89S51单片机最小系统电路 (4)2.1.1AT89S51单片机芯片简介 (4)2.1.2AT89S51的管脚排列 (4)2.1.3晶振电路 (5)2.1.4复位电路 (5)2.2 转速检测电路 (6)2.2.1霍尔元件3144简介 (7)2.2.2霍尔元件的使用注意事项 (7)2.2.3霍尔元件3144的电路设计 (7)2.3 数码管显示电路 (8)2.3.1数码管简介 (8)2 / 442.3.3数码管显示电路设计 (9)2.4 单片机ISP下载电路 (9)2.5 电机驱动电路 (10)2.5.1L298N芯片简介 (10)2.5.2驱动电路设计 (11)2.5.3保护电路设计 (12)3 电机调速设计 (12)3.1 PWM控制技术 (12)3.1.1PWM简介 (12)3.1.2PWM优点 (13)3.2 电机调速控制 (13)3.2.1调速原理 (13)3.2.2实现方法 (14)4 系统软件设计 (14)4.1 程序设计流程图 (14)4.2 单片机片内定时计数器介绍 (15)4.2.1定时计数器的结构 (15)4.2.2定时计数器的工作寄存器TMOD和TCON (15)4.3 片内中断系统简介 (16)4.3.1中断的概念 (16)4.3.2中断控制寄存器IE、IP (17)4.4 数码管显示程序的设计 (18)3 / 444.4.2转速显示实时更新的程序设计 (19)4.5 直流电机启动、停止程序的设计 (20)4.6 电机自动调速程序设计 (21)5 系统调试与数据测试 (23)5.1 系统调试 (23)5.1.1元件焊接与整板测试 (23)5.1.2系统软件调试 (24)5.2 系统实验 (24)5.2.1测试方法 (24)5.2.2测试结果分析 (24)6 结论 (25)谢辞 (26)参考文献 (27)附录 (28)附录一:系统原理图 (28)附录二:系统PCB (28)附录三:程序清单 (29)4 / 445 / 44引言直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
直流电机综合性能仿真(毕业设计_)

毕业设计(论文) 直流电机综合性能仿真摘要直流电机具有良好的线性调速特性,简单的控制性能,高效率,优异的动态特性,现在仍是大多数调速控制电动机的最优选择,而仿真对于控制系统的分析、设计和验证具有重要的意义,使用MATLAB中的Simulink工具箱可以进行控制系统的仿真。
作者借助于MATLAB 7.0软件,对一些典型的直流电机控制系统进行了仿真研究,实现了不同模型的动态仿真,对系统作了稳态和动态性能指标分析。
对直流电机调速系统,采取纯电气原理图结构搭建混合模块的系统模型仿真。
对数字PID控制算法进行了设计,包括简单的数字PID控制算法,同时在该调速系统中引入直流电机脉冲宽度调制(PWM)调速方法。
研究了利用仿真手段整定计算机控制直流电机系统的采样周期和PID参数的方法,以获得优良的系统调速性能。
关键词:MATLAB:仿真;直流电机;调速;PIDABSTRACTThe simulation is of great significance to analyze,design and validate the control system.Thesimulation of control system can be camed out through using MATLAB programming language andMATLAB/Simulink toolbox.The study on a couple of typical DC control systems with MATLAB 7.0has bean carried out by the author,and the system simulation based on difierent MATt,AB modds hasbeen realized,including the simulation oftbe system model which is purely constructed by the transferfunction blocks,the simulation of the system model which is made up of hybrid Simulink blocks andthe simulation ofthe system model coming from MATLAB programming,and the features ofthe aboveways are illustrated。
直流电机论文xin
直流电机论文xin1、绪论1.1课题背景直流电动机分为有换向器和无换向器两大类。
直流电动机调速系统最早采用恒定直流电压给直流电动机供电,通过改变电枢回路中的电阻来实现调速。
这种方法简单易行、设备制造方便、价格低廉;但缺点是效率低、机械特性软,不能得到较宽和平滑的调速性能。
该法只适用在一些小功率且调速范围要求不的场合。
30年代末期,发电机、电动机系统的出现才使调速性能优异的直流电动机得到广泛应用。
这种控制方法可获得较宽的调速范围、较小的转速变化率和平滑的调速性能。
但此方法的主要缺点是系统重量大、占地多、效率低及维修困难。
近年来,随着电力电子技术的迅速发展,由晶闸管变流器供电的直流电动机调速系统已取代了发电机、电动机调速系统,它的调速性能也远远地超过了发电机、电动机调速系统。
特别是大规模集成电路技术以及计算机技术的飞速发展,使直流电动机调速系统的精度、动态性能、可靠性有了更大的提高。
电力电子技术中IGBT等大功率器件的发展正在取代晶闸管,出现了性能更好的直流调速系统。
长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法,以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。
因此,各种仿真算法和仿真软件相继诞生了。
由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。
MATLAB提供的动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。
它有效的解决了以上仿真技术中的问题。
在Simulink中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。
另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。
Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,如现实世界中的摩擦、空气阻力、齿轮啮合等自然现象;它可以仿真大到宏观的星体,小至微观的分子原子。
现代控制课程论文 直流电机
现代控制理论课程报告——基于状态方程的直流电机模型的建立与分析班级:电气工程与自动化2011-15班组长:张明利组员:陈智广杨宏伟吕奇王开申范醒春孙浩日期:2014年4月13日目录一、直流电动机简介 (1)1.1直流电动机的研究意义 (1)1.2直流电机的结构 (1)1.3直流电机的调速原理 (1)二、直流电机数学模型的建立 (2)2.1电压平衡方程 (2)2.2力矩平衡方程 (3)2.3 合并完整的模型 (4)2.4 直流电机的状态方程 (5)三、直流电机系统的模型分析 (5)3.1系统的能控性和能观性分析 (5)3.1.1系统的能控性 (5)3.1.2系统的能观性 (6)3.1.3系统的最小实现 (6)3.2系统的输入输出传递函数 (6)3.3 系统的Simulink仿真分析 (7)3.4动态系统的稳定性分析 (7)四、系统的状态反馈及极点配置 (8)五、状态观测器及其设计 (10)六、课程设计总结 (13)参考文献 (15)现代控制理论课程报告 ——基于状态方程的 直流电机模型的建立与分析一、直流电动机简介 1.1直流电动机的研究意义电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
无论是在工农业生产,还是在日常生活的家用电器和消费电子产品中,都大量使用着各种各样的电动机。
直流电机作为其中的一类,具有良好的调速特性、较大的启动转矩等优点,是现今工业上应用最广的电机之一。
研究其系统模型对于工业生产控制具有具有重要作用!1.2直流电机的结构图1-1直流电机的物理模型图直流电动机的基本结构如图1-1,其中固定部分主磁极和电刷,转动部分有环形铁心和绕在环形铁心上的绕组。
1.3直流电机的调速原理直流电机转速n 的表达式为:Φ-=K IR U n 式中:U-电枢端电压 I-电枢电流 R-电枢电路总电阻 Φ-每极磁通量K-与电机结构有关的常数由上式可知,直流电机转速n 的控制方法有三种:(1)调节电枢电压U 。
[论文]直流电机的基本工作原理
![[论文]直流电机的基本工作原理](https://img.taocdn.com/s3/m/9a758b59777f5acfa1c7aa00b52acfc789eb9f2a.png)
直流电机的基本工作原理直流电机的基本工作原理直流励磁的磁路在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。
在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。
此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。
直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。
在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。
虽然直流发电机和直流电动机的用途各不同,但是它们的结构基本上一样,都是利用电和磁的相互作用来实现机械能与电能的相互转换。
直流电机的最大弱点就是有电流的换向问题,消耗有色金属较多,成本高,运行中的维护检修也比较麻烦。
因此,电机制造业中正在努力改善交流电动机的调速性能,并且大量代替直流电动机。
不过,近年来在利用可控硅整流装置代替直流发电机方面,已经取得了很大进展。
包括直流电机在内的一切旋转电机,实际上都是依据我们所知道的两条基本原则制造的。
一条是:导线切割磁通产生感应电动势;另一条是:载流导体在磁场中受到电磁力的作用。
因此,从结构上来看,任何电机都包括磁场部分和电路部分。
从上述原理可见,任何电机都体现着电和磁的相互作用,是电、磁这两个矛盾着的对立面的统一。
我们在这一章里讨论直流电机的结构和工作原理,就是讨论直流电机中的“磁”和“电”如何相互作用,相互制约,以及体现两者之间相互关系的物理量和现象(电枢电动势、电磁转矩、电磁功率、电枢反应等)。
一、直流发电机的基本工作原理直流发电机和直流电动机具有相同的结构,只是直流发电机是由原动机(一般是交流电动机)拖动旋转而发电。
可见,它是把机械能变为电能的设备。
直流电动机则接在直流电源上,拖动各种工作机械(机床、泵、电车、电缆设备等)工作,它是把电能变为机械能的设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、绪论1.1课题背景直流电动机分为有换向器和无换向器两大类。
直流电动机调速系统最早采用恒定直流电压给直流电动机供电,通过改变电枢回路中的电阻来实现调速。
这种方法简单易行、设备制造方便、价格低廉;但缺点是效率低、机械特性软,不能得到较宽和平滑的调速性能。
该法只适用在一些小功率且调速范围要求不的场合。
30年代末期,发电机、电动机系统的出现才使调速性能优异的直流电动机得到广泛应用。
这种控制方法可获得较宽的调速范围、较小的转速变化率和平滑的调速性能。
但此方法的主要缺点是系统重量大、占地多、效率低及维修困难。
近年来,随着电力电子技术的迅速发展,由晶闸管变流器供电的直流电动机调速系统已取代了发电机、电动机调速系统,它的调速性能也远远地超过了发电机、电动机调速系统。
特别是大规模集成电路技术以及计算机技术的飞速发展,使直流电动机调速系统的精度、动态性能、可靠性有了更大的提高。
电力电子技术中IGBT等大功率器件的发展正在取代晶闸管,出现了性能更好的直流调速系统。
长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法,以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。
因此,各种仿真算法和仿真软件相继诞生了。
由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。
MATLAB提供的动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。
它有效的解决了以上仿真技术中的问题。
在Simulink 中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。
另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。
Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,如现实世界中的摩擦、空气阻力、齿轮啮合等自然现象;它可以仿真大到宏观的星体,小至微观的分子原子。
它可以建模和仿真的对象的类型广泛,既可以是机械的、电子的等现实存在的实体,也可以是理想的系统。
它可仿真动态系统的复杂性可大可小,可以是连续的、离散的或混合型的。
Simulink会使你的计算机成为一个实验室,用它可对各种现实中存在的、不存在的、甚至是相反的系统进行建模与仿真。
传统的研究方法主要有解析法,实验法与仿真实验,其中前两种方法在具有各自优点的同时也存在着不同的局限性。
随着生产技术的发展,对电气传动在启制动、正反转以及调速精度、调速范围、静态特性、动态响应等方面提出了更高要求,这就要求大量使用调速系统。
由于直流电机的调速性能和转矩控制性能好,从20世纪30年代起,就开始使用直流调速系统。
它的发展过程是这样的:由最早的旋转变流机组控制发展为放大机、磁放大器控制。
再进一步,用静止的晶闸管变流装置和模拟控制器实现直流调速。
再后来,用可控整流和大功率晶体管组成的PWM控制电路实现数字化的直流调速,使系统快速性、可控性、经济性不断提高。
调速性能的不断提高使直流调速系统的应用越来越广泛。
1.2课题意义随着生产技术的发展,对直流电气传动在起制动、正反转以及调节精度、调速范围、静态特性、动态响应等方面都提出了更高的要求,这就要求大量使用直流调速系统。
因此人们对直流调速系统的研究将会更加深入。
直流电动机是最早出现的电动机,也是最早实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,效率高,优异的动态性能,现在仍是大多数调速控制电动机的最优选择。
因此研究直流电机的调速控制,有着非常重要的意义。
2系统设计原理及要求2.1设计原理直流电动机的电枢电压由三相晶闸管整流电路经平波电抗器L供电,并通过改变触发器移相控制信号Uc调节晶闸管的控制角,从而改变整流器的输出电压实现直流电动机的调速。
图1-1为晶闸管—直流电动机调速系统原理图,图中VT是晶闸管可控整流器,通过调整触发装置的控制电压Uc来移动触发脉冲的相位,即可改变平均整流电压Ud,从而实现平滑调速。
图1-1 直流开环调速系统原理图2.2设计要求任何一台需要控制转速的设备,其生产工艺对调速性能都有一定的要求。
例如,最高转速与最低转速之间的范围,是有级调速还是无级调速,在稳态运行时允许转速波动的大小,从正转运行变到反转运行的时间间隔,突加或突减负载时允许的转速波动,运行停止时要求的定位精度等等。
归纳起来,对于调速系统转速控制的要求有以下三个方面:(1) 调速。
在一定的最高转速和最低转速范围内,分档地(有级)或平滑地(无级)调节转速。
(2) 稳速。
以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动,以确保产品质量。
(3) 加、减速。
频繁起、制动的设备要求加、减速尽量快,以提高生产率;不宜经受剧烈速度变化的机械则要求起、制动尽量平稳。
为了进行定量的分析,可以针对前两项要求定义两个调速指标,叫做“调速范围”和“静差率”。
这两个指标合称调速系统的稳态性能指标。
(1) 调速范围生产机械要求电动机提供的最高转速max n 和最低转速m in n 之比叫做调速范围,用字母D 表示,即 minmax n n D = (2—1) 其中,max n 和m in n 一般都指电动机额定负载时的最高和最低转速,对于少数负载很轻的机械,例如精密磨床,也可用实际负载时的最高和最低转速。
(2) 静差率当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落N n ∆,与理想空载转速0n 之比,称作静差率s ,即 0n n s N ∆= (2—2) 或用百分数表示%1000⨯∆=n n s N 显然,静差率是用来衡量调速系统在负载变化时转速的稳定度的。
它和机械特性的硬度有关,特性越硬,静差率越小,转速的稳定度就越高。
然而静差率与机械特性硬度又是有区别的。
一般变压调速系统在不同转速下的机械特性是互相平行的,对于同样硬度的特性,理想空载转速越低时,静差率越大,转速的相对稳定度也就越差。
由此可见,调速范围和静差率这两项指标并不是彼此孤立的,必须同时提才有意义。
在调速过程中,若额定速降相同,则转速越低时,静差率越大。
如果低速时的静差率能满足设计要求,则高速时的静差率就更能满足要求了。
因此,调速系统的静差率指标应以最低速进所能达到的数值为准。
(3) 直流变压调速系统中调速范围、静差率和额定速降之间的关系在直流电动机变压调速系统中,一般以电动机的额定转速N n 作为最高转速,若额定负载下的转速降落为N n ∆,则按照上面分析的结果,该系统的静差率应该是最低速时的静差率,即NN N n n n n n s ∆+∆=∆=min min 0 于是,最低转速为()sn s n s n n N N N ∆-=∆-∆=1min 而调速范围为 min min max n n n n D N ==将上面的m in n 式代入,得()s n s n D N N -∆=1 (2—3) 式(2—3)表示变压调速系统的调速范围、静差率和额定速降之间所应满足的关系。
对于同一个调速系统,n u ∆值一定,由式(2—3)可见,如果对静差率要求越严,即要求s 值越小时,系统能够允许的调速范围也越小。
3、主电路设计3.1仿真原理图V-M 调速系统仿真图如图3-1所示:90° αmax αmin图3-1 直流电动机开环调速系统仿真图3.2触发电路设计根据直流电机控制原理,我们可知调节控制电压Uc 可以移动触发装置脉冲的相位,即可方便的改变可控整流器的输出的瞬时电压ud 的波形,以及输出平均电压Ud 的数值。
触发器的控制角由移相控制信号Uc 决定,移相特性的数学表达式为:min c cmax9090U U αα︒-=︒- 在本模型中取︒=30min α,V U c 10max =,V U c 10min -=所以c U 690-=α。
移相特性如图3-2所示:图3-2:移相特性曲线在本系统中,我们选择Uc=10V ,所以触发延时角︒=30α。
U CmaU cmin本系统采用三相桥式整流电路,所以采用同步六脉冲发生器用于产生晶闸管的触发脉冲,一个周期中,它产生6个触发信号,每个触发信号的间隔是60°。
六脉冲发生模块有5个输入端,一个输出端。
输入端alpha-deg用于给定移α。
相控制角的大小,这里为︒=30输入端AB、BC、CA用于接入同步信号,同步的作用是使触发其产生的触发信号与整流主电路晶闸管所需要被触发的时刻相一致,并且要保证三相桥6个晶闸管主电路按规定的顺序依次触发,因此同步信号要与晶闸管主电路的三相电源保持一定的相位关系。
输入端Block用于控制触发脉冲的输出,在该端置“0”,则有脉冲输出。
触发电路具体参数值设计如下:3.3电压源设计在仿真过程中,为了简化模型,省略了整流变压器和同步变压器,整流器和同步触发装置使用同一个交流电源,为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感Ls=0。
由于设计要求中有告知考虑整流装置内阻R,为此,再计算供电电源电压的时候,我们要考虑整流装置电阻的影响。
在分析V-M系统的主电路时,如果把整流装置内阻recR等效到装置外边,看成是其负载电路的电阻的一部分,那么整流电压便可以用理想空载瞬时值ud和平均值Ud来表示,其等效原理图如图3-3所示:图3-3:三相桥式全控整流电路主电路等效原理图基于上述分析,并采用三相全桥整流电路,最终我们能够确定系统的供电电压为:V 19730cos 34.21363.1220cos 34.2min 2≈︒⨯⨯+=+=αn rec n I R U U 三相电源具体参数值设计如下: 模块参数名 参数 三相电源(Three-Phase Source ) Phase-to-phase rms voltage/V 197*sqrt(3) Phase angle of phase A/degrees0 Frequency/Hz 503.4整流装置设计根据设计要求这里我们选用三相桥式全控整流装置,已知电机的电枢绕组Ω=21.0a R ,整流装置装置内阻Ω=3.1R 。
这里我们在系统主电路中用电阻等效系统整流装置器的内阻值。
三相桥式全控整流装置具体参数值设计如下:3.5直流电动机设计直流电动机的运行特性主要有两条:一条是工作特性曲线,另一条是机械特性曲线,即转速-转矩特性曲线。
分析表明,运行性能因励磁方式不同而有很大差异。
在直流电动机模型中,F+和F-是直流电机励磁绕组的连接端,A+和A-是直流电动机电枢绕组的联结端,TL 是电动机负载转矩的输入端。