蒙德驱动器主轴(MF)调试步骤
蒙德驱动器主轴(MF)调试步骤
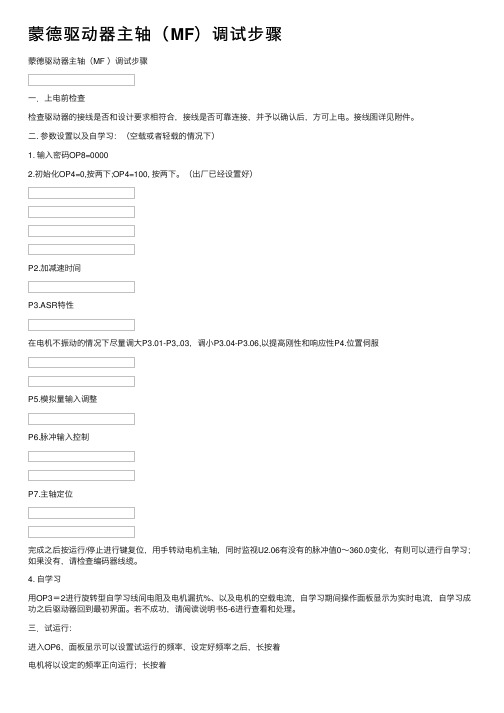
蒙德驱动器主轴(MF)调试步骤蒙德驱动器主轴(MF )调试步骤⼀.上电前检查检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,⽅可上电。
接线图详见附件。
⼆. 参数设置以及⾃学习:(空载或者轻载的情况下)1. 输⼊密码OP8=00002.初始化OP4=0,按两下;OP4=100, 按两下。
(出⼚已经设置好)P2.加减速时间P3.ASR特性在电机不振动的情况下尽量调⼤P3.01-P3,.03,调⼩P3.04-P3.06,以提⾼刚性和响应性P4.位置伺服P5.模拟量输⼊调整P6.脉冲输⼊控制P7.主轴定位完成之后按运⾏/停⽌进⾏键复位,⽤⼿转动电机主轴,同时监视U2.06有没有的脉冲值0~360.0变化,有则可以进⾏⾃学习;如果没有,请检查编码器线缆。
4. ⾃学习⽤OP3=2进⾏旋转型⾃学习线间电阻及电机漏抗%、以及电机的空载电流,⾃学习期间操作⾯板显⽰为实时电流,⾃学习成功之后驱动器回到最初界⾯。
若不成功,请阅读说明书5-6进⾏查看和处理。
三.试运⾏:进⼊OP6,⾯板显⽰可以设置试运⾏的频率,设定好频率之后,长按着电机将以设定的频率正向运⾏;长按着运⾏时,驱动器显⽰界⾯会⾃动从频率显⽰变化到实时电流显⽰,正反转电流接近⼤⼩则为正常。
注:如果试运⾏过程中电机振动,请将E5.01、E5.02、E5.03的增益参数设⼩再试运⾏同时检查电机参数以及编码器参数有没有设错。
试运⾏正常之后就可以接⼊系统由系统来控制。
附件:接线图5.5KW及以下(⼩机壳):三相电源340-420V50/60HzCN2端⼝(控制脉冲输⼊/脉冲反馈输出)模拟量输⼊/输出接⼝晶体管输出接⼝DC48V 50mA以下7.5KW及以上(⼤机壳):TM2端⼝三相电源340-420V 50/HzTS ~+10V 』以下TM3端⼝(模拟量输出接⼝)TM1端⼝(功能输出接⼝)TM3端⼝30mA30m 以下』~+10V 』。
蒙德MD 电梯一体化控制器用户手册

第七章:功能参数说明 ..................................................................................................................... 77
第一章:安全与注意事项 ................................................................................................................... 7
1.1 安全标志定义:........................................................................................................................................................ 7 1.2 安全事项: ............................................................................................................................................................... 7
第四章:调试工具使用说明 ............................................................................................................. 36
蒙德MF变频器快速设定文件
TAPPING CENTER主轴包套调试手册By : 新代数控Date : 2012/02/6Ver : 1.6版本更新记录目录一、摘要 (4)二、硬件规格确认 (5)1、相关硬件 (5)2、主轴相关需要用到的外部I/O点 (5)三、连接 (6)1、驱动、电机与新代的连接 (6)2、布线注意要点 (7)四、系统主轴相关参数设定 (8)五、蒙德变频器调试步骤: (9)1、准备参数 (9)2、请按照以下建议值设定 (9)3、自学习调试 (10)4、应用参数调整 (11)5、辅助参数调整 (12)6、主轴定位调试 (13)六、常见问题排查(Q&A) (14)七、附件 (15)1、驱动器常见警报 (15)2、状态监视参数 (16)一、摘要本手册是TAPPING CENTER针对以下驱动器和马达规格的调试手册,内容包括:硬件规格确认、硬件连接、系统主轴相关参数设定、变频器调试步骤以及常见问题排查五个部分,制定此手册的目的在于让新代和机械厂技术人员在使用手工调试主轴包套时使用,也可以作为熟悉新代主轴包套的学习资料。
二、硬件规格确认1、相关硬件表一:2、主轴相关需要用到的外部I/O点表三:三、连接1、驱动、电机与新代的连接下表提供回生电阻的选配资料供参考。
表四:注意:功率的选用要考虑主轴的减速时间和惯量p∝T*ω,在主轴做高减速刚攻时会释放大量的能量必须使用大功率电阻方可承但,如果机台用长时间连续刚攻的需要,制动电阻上还要加装冷却风扇,不然止动电租可能会因过热而烧坏。
2、布线注意要点a、电盘配电时请将编码器信号线和动力线分开走线,尽量让编码器线与动力线保持距离,以避开干扰源。
b、建议在编码器线上增加磁环,增强抗干扰能力。
c、做到编码器屏蔽线双端接地。
四、系统主轴相关参数设定说明:参数26设定4,表示此主轴的运转指令,由控制器轴卡的P4接口送出,因此驱动器的指令连接线须连接P4口。
参数66设定此主轴伺服规划之每转分辨率,此参数需与参数1651设定相同。
蒙德一体化调试说明
15
11
10
6
5
1
1:B- 2:NC 3:R+ 4:R- 5:A+ 6:A7:0V 8:B+ 9:5V
10:C- 11:C+ 12:D+ 13:D- 14:NC
15:NC
适配编码器
ERN1387 型 SIN/COS
PG卡——LPG10
蒙德一体化硬件说明
IN状态显示 OUT状态显示
数码管显示界面
操作界面
粘联保护 运行接触器、抱闸接触器 更换粘死的接触器,确保信号正
或门锁接触器粘死
常输入
E10
70
总运行时间 电梯总运行的时间超过了 电梯运行的总运行时间,加长总
保护
总的保护时间
运行保护时间
E11
71
单层时间保 电梯运行一层的时间超过 加长电梯的单层保护时间
护
了电梯的单层保护时间
E12
72
驱动底盘故 驱动底盘报警
不往上行检查上限位信号,
慢下键不往下行
不往下行检查下限位信号
慢车时常见故障及处理办法
蒙德一体化调试
快车前检查
电梯硬件检查快车前检查 控制器参数检查 主控板输入条件检查
快车调试
井道自学习 自动状态,电梯停在一楼平层位置操作器S01设为1
快车试运行
在行快车各方面条件满足的情况下先行单层运
行,再多层运行
调试步骤
快车调试
并联调试
1、行快车前硬件检查 2、电机参数设置 3、微机控制输入条件检查 4、井道自学习 5、快车试运行 6、舒适感调试 7、电梯各功能调试
蒙德一体化调试步骤
慢车前的检查
安全回路 厅门、轿门门锁 驱动器参数 编码器是否正常工作 主控板输入信号
蒙德驱动器载重调试
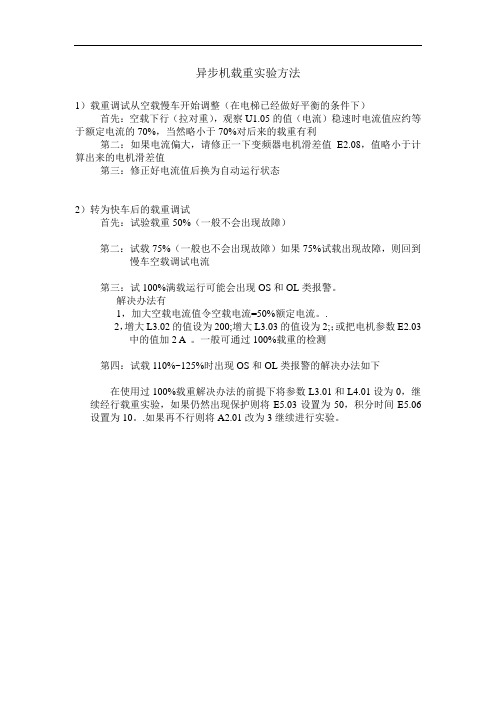
异步机载重实验方法
1)载重调试从空载慢车开始调整(在电梯已经做好平衡的条件下)首先:空载下行(拉对重),观察U1.05的值(电流)稳速时电流值应约等于额定电流的70%,当然略小于70%对后来的载重有利
第二:如果电流偏大,请修正一下变频器电机滑差值E2.08,值略小于计算出来的电机滑差值
第三:修正好电流值后换为自动运行状态
2)转为快车后的载重调试
首先:试验载重50%(一般不会出现故障)
第二:试载75%(一般也不会出现故障)如果75%试载出现故障,则回到慢车空载调试电流
第三:试100%满载运行可能会出现OS和OL类报警。
解决办法有
1,加大空载电流值令空载电流=50%额定电流。
.
2,增大L3.02的值设为200;增大L3.03的值设为2;;或把电机参数E2.03中的值加2 A 。
一般可通过100%载重的检测
第四:试载110%~125%时出现OS和OL类报警的解决办法如下
在使用过100%载重解决办法的前提下将参数L3.01和L4.01设为0,继续经行载重实验,如果仍然出现保护则将E5.03设置为50,积分时间E5.06设置为10。
.如果再不行则将A2.01改为3继续进行实验。
门机调试方法

蒙德电气伺服门机控制器IMS-DS20P2B 系列详细调试方法补充说明具体按键说明请参照说明书蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V 以上电压除外);接线调试简单+24VX1X2X3X4XC 0V+24VX1X2X3X4XC 0V外部电源接线方法内部电源接线方法1(电源高于18V有效)(开关接通有效)+24VX1X2X3X4XC 0V 内部电源接线方法2(开关接通有效)情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
12.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
23.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作.34.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED.运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误.重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测.若只开门后没有关门,则把SW1拨到相反方向即可。
蒙德IMSMF交流伺服驱动器使用说明书
产品运转前请认真阅读说明书,并请保存好,以便以后查阅。
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-MF 系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5kW ~55kW(E)NO:JSWJ-01-21-02-01目录第1章使用铭牌说明………………………………………………………………………………1-1机型与尺寸……………………………………………………………………………1-2安装场所的确认与管理………………………………………………………………1-4安装方向与空间………………………………………………………………………1-5第2章接线连接周边机器…………………………………………………………………………2-1端子台的构成…………………………………………………………………………2-2相互接线………………………………………………………………………………2-4控制回路端子的功能…………………………………………………………………2-6FU-05*扩展卡…………………………………………………………………………2-9FU-08*扩展卡………………………………………………………………………2-10第3章数字式操作器和参数组的概要数字式操作器…………………………………………………………………………3-1参数组的概要…………………………………………………………………………3-4第4章参数一览表参数一览表与内容说明………………………………………………………………4-1监视参数………………………………………………………………………………4-2系统操作………………………………………………………………………………4-3应用参数………………………………………………………………………………4-4第5章报警检查报警检出………………………………………………………………………………5-1报警说明………………………………………………………………………………5-6第6章调试过程及功能应用试运行的操作…………………………………………………………………………6-1速度控制………………………………………………………………………………6-4位置控制………………………………………………………………………………6-5主轴定位………………………………………………………………………………6-6刚性攻丝………………………………………………………………………………6-8附录…………………………………………………………………………………6-10使用本章节说明驱动器到货时以及安装时的确认事项。
Siemens 802DSL系统伺服全闭环及主轴编码器调试步骤
• 选择CU_I驱动对象,
• 设置P977=1存储所有 参数,等待P977自动 变为0,存储结束。返 回。
• 进入轴机床数据的X轴 数据,设置如下参数: • 30100=5 • 30110=1 • 30120=1 • 30130=1 • 30200=1 • 30220=1 • 30230=2 • 30240=1
在PC机上使用CTRL+E,
进入专家模式,
• 然后将P140参数设置 为3。如下图:
再次选择SERVO_03 X轴的[Configuration]驱动配
置。
出现如图所示画面。
在ENCODER 3处选择EDS2:如下图所示:
• 选择 进入配 置画面,连续按 直至出现图所示画面:
• 选择 • 选择 • 选择
按下图所示选择
选择后,出现下图图示:
• 选择 进行数据配置 。
在出现的画面中选择
继续
在出现的画面中选择
继续
在出现的画面中选择
继续Байду номын сангаас
在出现的画面中选择
继续
在出现的画面中选择[Encoder 2]勾选项。
• 在出现的画面中,在 处钩选,选择配置第 二编码器,选择后, 出现下图图示:
如所配置光栅尺为距离码光栅尺,可直接通过选择[Select standard encoder from list]选择标准编码器数据,选择标准编码器数据后,可在下 面所示框中选择需要的配置,例如光栅尺为海德汉382C,
打开后,出现如图所示画面。
• 在画面左上角选择如 图所示图标。
根据下图所示分别设置相应数据。设置后,选择 [OK]。
• 软件左侧将显示如上 图所示菜单树。
• 在软件上选择 进行 同系统的连接。
蒙德调试步骤及接线图
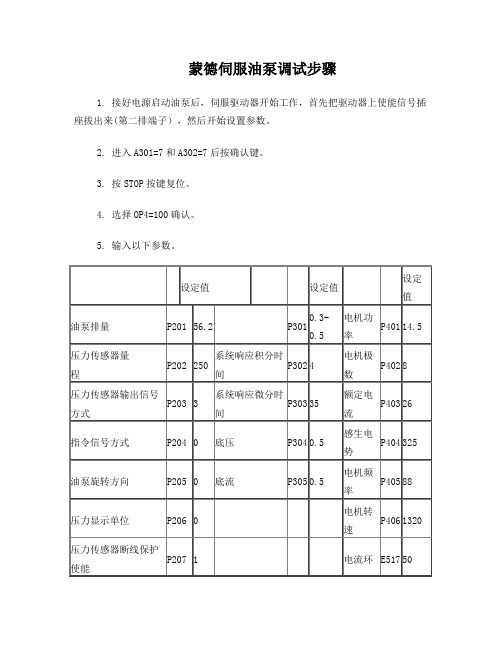
蒙德伺服油泵调试步骤
1. 接好电源启动油泵后,伺服驱动器开始工作,首先把驱动器上使能信号插座拔出来(第二排端子),然后开始设置参数。
2. 进入A301=7和A302=7后按确认键。
3. 按STOP按键复位。
4. 选择OP4=100确认。
5. 输入以下参数。
最高输出压力P2.08 175 C101 0.15 电机最高转速P209 1500
系统压力最大值P210 195
注:没有中文说明是固定值,有中文说明按机型不同可变的
6. 按STOP按键复位
7. 选择OP3=0后连续按两次确认键自学习完成后,OP3=3后连续按两次确认键自学习完成后,重新接上使能信号插座就可以其它动作,如无任何动作则需要在驱动器上任意调换两根电源线,重做OP3=3进行自学习。
蒙德(MODROL)IMS-GL2变频器说明书
输出频率 输出电流
多功能模拟输出
FC 模拟量公共端0V
RS422/485
传送
R+ MEMOBUS通信输入
R-
RS-485 2线制,请短接R+和S+,R-和S-
S+ S-
MEMOBUS通信输出
■ MC 电磁接触器 可以通过断开 MC 断开主回路电源,电机自由滑行停止,但频繁地开/闭会引起变频器故障。 MC 的容量请选用为变频器额定电流的 1.5~2 倍。参见表 2.1
■ R 制动电阻 在制动力矩不能满足要求时使用,运用于大惯性负载、频繁制动或快速刹车的情况。 参见表 2.1
■ 接地线的设置 接地端子,请务必接地。E 接地线切勿与焊接机及动力设备共用。两台以上变频器使用场合,请勿将接地线形成回路。
外部基极封锁 X8
输入公共端 SC
G
多功能脉冲输入 0~32KHz
模拟量电源+10V
多功能模拟输入1 -10V~+10V
RP
2KΩ
V+
2KΩ
F1
多功能模拟输入2
F2
-10V~+10V
FC 模拟量输入公共端
模拟量电源-10V
V-
R+
MEMOBUS通信RS-
R-
485/422
S+
S-
G
MP
多功能
FC
脉冲输出
● G round the controller in proper ● P lease read the m anual carefully
before installation or operation.
30mm以上
30mm以上
蒙德变频加工中心主轴调机内容

4
数值,并将该数值输进参数 J4.01.中。设定定位角度。 4、 设定参数 H1.01.=29,将输入端子 X3 设定为定位端子;设定参数 H2.03.=24,将输出端
5
刚性攻丝
模拟量修调: 进行刚性攻丝设定前,请先对模拟量进行修调。使系统给定速度与电机实际转速达到精 确控制。模拟量电源输入线缆请选用双绞屏蔽线。
注意:调整过程中请注意系统设定模拟量与转速的对应参数数值与驱动器设置最高输出频率(模拟量 10V 对应输出频率)数值是否匹配。
调整步骤: (1)断开驱动器侧模拟量电源线,系统给定转速,使模拟量值与给定转速相对应; (2)连接驱动器侧模拟量电源线,系统给定转速,使模拟量值与给定转速相对应; (3)在保证屏蔽处理恰当、参数 H3.01.=100、H3.02.=0、H3.08.=0 的前提下,系统给
检查上位机接受信号是否正常。
2、编码器线数的检查(AB 相正交编码器)
在编码器线数未知的前提下,将编码器线数设定为 2500,用手转动电机主轴至 U2.06.=0000 后,再转动主轴一圈,读取 U2.06.数值 a,该编码器线数为 a/4。
二、试运行(必须在电机空载情况下进行)
设定相应电机参数与编码器参数,并将 B1.01.与 B1.02.置“0”。用操作器给定电机频率运行。
Y
器PG卡经驱动器接地。
连接TM1信号
相对FC端子,分别于电容C1、C2、C3两端
测量SIGN、PLUS、CLR信号是否正常?
N 检查脉冲发生器接线是否正确?
蒙德MF变频器快速设定文件
TAPPING CENTER主轴包套调试手册By : 新代数控Date : 2012/02/6Ver : 1.6版本更新记录目录一、摘要 (4)二、硬件规格确认 (5)1、相关硬件 (5)2、主轴相关需要用到的外部I/O点 (5)三、连接 (6)1、驱动、电机与新代的连接 (6)2、布线注意要点 (7)四、系统主轴相关参数设定 (8)五、蒙德变频器调试步骤: (9)1、准备参数 (9)2、请按照以下建议值设定 (9)3、自学习调试 (10)4、应用参数调整 (11)5、辅助参数调整 (12)6、主轴定位调试 (13)六、常见问题排查(Q&A) (14)七、附件 (15)1、驱动器常见警报 (15)2、状态监视参数 (16)一、摘要本手册是TAPPING CENTER针对以下驱动器和马达规格的调试手册,内容包括:硬件规格确认、硬件连接、系统主轴相关参数设定、变频器调试步骤以及常见问题排查五个部分,制定此手册的目的在于让新代和机械厂技术人员在使用手工调试主轴包套时使用,也可以作为熟悉新代主轴包套的学习资料。
二、硬件规格确认1、相关硬件表一:2、主轴相关需要用到的外部I/O点表三:三、连接1、驱动、电机与新代的连接下表提供回生电阻的选配资料供参考。
表四:注意:功率的选用要考虑主轴的减速时间和惯量p∝T*ω,在主轴做高减速刚攻时会释放大量的能量必须使用大功率电阻方可承但,如果机台用长时间连续刚攻的需要,制动电阻上还要加装冷却风扇,不然止动电租可能会因过热而烧坏。
2、布线注意要点a、电盘配电时请将编码器信号线和动力线分开走线,尽量让编码器线与动力线保持距离,以避开干扰源。
b、建议在编码器线上增加磁环,增强抗干扰能力。
c、做到编码器屏蔽线双端接地。
四、系统主轴相关参数设定说明:参数26设定4,表示此主轴的运转指令,由控制器轴卡的P4接口送出,因此驱动器的指令连接线须连接P4口。
参数66设定此主轴伺服规划之每转分辨率,此参数需与参数1651设定相同。
门机调试方法

蒙德电气伺服门机控制器IMS-DS20P2B 系列详细调试方法补充说明具体按键说明请参照说明书蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V 以上电压除外);接线调试简单+24VX1X2X3X4XC 0V+24VX1X2X3X4XC 0V外部电源接线方法内部电源接线方法1(电源高于18V有效)(开关接通有效)+24VX1X2X3X4XC 0V 内部电源接线方法2(开关接通有效)情况1:无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
12.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
23.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作。
34.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPEN SPEED/CLOSE SPEED。
运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误。
重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测。
主轴转速参数设置方法

主轴转速参数设置方法主轴转速参数设置方法主轴转速是指机床主轴旋转的速度,它是加工工艺中一个重要的参数。
合理的主轴转速设置可以保证加工质量,提高加工效率,延长工具寿命,减少工件变形和机床负载,因此主轴转速参数的设置十分关键。
下面将介绍一种主轴转速参数设置方法。
一、了解加工工件在设置主轴转速参数之前,首先要了解加工工件的材质、尺寸、形状和加工要求。
根据工件的特性来选择合适的主轴转速范围。
二、选择切削速度切削速度是指刀具在工件表面形成切削速度的线速度。
切削速度与刀具材料、工件材料和切削方式有关。
可以根据切削速度公式V=πDN来计算切削速度,式中V为切削速度,π为圆周率(取3.14),D为刀具直径,N为主轴转速。
根据工件和刀具材料选择合适的切削速度。
三、选择进给速度进给速度是指刀具在工件上每分钟切削的长度或宽度。
进给速度与主轴转速、主轴进给量、刀具进给量有关。
可以根据进给速度公式F=N×fn×z来计算进给速度,式中F为进给速度,N为主轴转速,fn为主轴进给量,z为刀具进给量。
根据工件形状、加工方式和机床切削性能选择合适的进给速度。
四、判断切削稳定性切削稳定性是指切削过程中切削力、切削温度和切削振动的稳定性。
判断切削稳定性可以根据主轴转速和切削力的关系、切削温度的变化和工件表面的瑕疵等指标来判断。
一般来说,主轴转速过高容易产生切削振动,影响加工质量;主轴转速过低则可能导致加工效率低下。
因此,要选择一个合适的主轴转速来保证切削稳定性。
五、试切试验在确定主轴转速参数之前,可以进行试切试验来验证切削性能和加工效果。
试切试验可以调整切削速度、进给速度和刀具形状等参数,找到合适的主轴转速。
在试切试验过程中要注意切削力、切削温度、加工质量和机床负载等指标的变化,以保证加工效果和工具寿命。
总之,主轴转速参数设置是一个综合考虑加工工艺、切削性能和加工要求的过程。
通过合理选择切削速度、进给速度、判断切削稳定性和试切试验等方法,可以得到一个适合的主轴转速参数,实现高效、稳定和高质量的加工。
蒙德驱动器主轴MF调试步骤精编版

蒙德驱动器主轴M F调
试步骤精编版
MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
MF )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二.参数设置以及自学习:(空载或者轻载的情况下)
1.输入密码OP8=0000
2.初始化OP4=0,按两下
RUN
;OP4=100,按两下
RUN。
(出厂已经设置好)
P2.加减速时间
特性
P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视有没有的脉冲值0~变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4.自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6
行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将、、的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
及以下(小机壳):
及以上(大机壳):。
主轴动平衡调试的方法与步骤

主轴动平衡调试的方法与步骤以主轴动平衡调试的方法与步骤为标题,本文将介绍主轴动平衡调试的基本原理、步骤以及注意事项,帮助读者了解如何进行有效的主轴动平衡调试。
一、主轴动平衡调试的基本原理主轴动平衡调试是通过对机械设备的主轴进行动平衡,以消除不平衡产生的振动和噪声,提高设备的运转精度和稳定性。
主轴动平衡调试的基本原理是根据质量不平衡的特点,通过在主轴上加上适当的质量,使主轴在高速运转时达到动平衡状态。
二、主轴动平衡调试的步骤1. 准备工作:在进行主轴动平衡调试之前,需要进行一些准备工作。
首先,要准备好主轴动平衡调试的仪器设备,例如动平衡仪、锤子、复合材料等。
其次,要检查主轴的安装情况和固定件,确保主轴安装牢固。
最后,要对主轴进行清洁,确保没有杂质。
2. 确定调试方案:根据实际情况,确定主轴动平衡调试的方案。
主轴动平衡调试的方案包括调试的目标、方法和步骤等。
根据主轴的特点和调试的要求,选择合适的调试方法和步骤。
3. 进行初步调试:在进行正式的主轴动平衡调试之前,需要进行初步的调试。
初步调试的目的是确定主轴的不平衡情况,为后续的调试提供依据。
初步调试可以使用简单的方法,例如观察主轴的运转情况,检测振动和噪声等。
4. 进行正式调试:在完成初步调试之后,可以进行正式的主轴动平衡调试。
正式调试需要使用专业的动平衡仪进行。
首先,将动平衡仪固定在主轴上,并启动设备。
然后,通过动平衡仪的测量,确定主轴的质量不平衡情况。
最后,根据测量结果,通过在主轴上加上适当的质量,使主轴达到动平衡状态。
5. 检验调试效果:在完成主轴动平衡调试之后,需要进行调试效果的检验。
检验的方法可以使用振动仪、噪声仪等。
通过检验,可以确定主轴的振动和噪声是否得到了有效的控制,以及调试效果是否达到了预期的要求。
三、主轴动平衡调试的注意事项1. 安全第一:在进行主轴动平衡调试时,要注意安全。
在调试过程中,要佩戴好防护用品,确保人身安全。
同时,要注意设备的安全操作,避免发生意外事故。
主轴装调实训

主轴装调实训
主轴装调实训是针对机械加工行业的实训环节之一,主要涉及到机床主轴的安装和调试。
下面是主轴装调实训的一些内容和步骤:
1. 实训前的准备工作
在进行主轴装调实训之前,需要对机床和主轴相关的设备和工具进行准备和检查,确定所有的工具、配件、螺栓、轴承、油脂等材料已经准备妥当。
2. 主轴的安装
安装主轴是主轴装调实训的第一步,首先要选好合适的轴承和其他配件,然后将主轴安装到机床床身上。
3. 主轴的调试
在安装好主轴之后,需要进行调试工作。
主轴调试的目的是测试主轴的性能和运转情况,包括主轴的转速、运行稳定性、振动情况等。
4. 可靠性测试
在完成主轴的安装和调试后,需要进行可靠性测试。
可靠性测试主要是为了验证主轴能够在长时间、高速、大负荷的情况下稳定运转,并且在使用过程中不会出现故障或失效。
5. 故障分析与排除
如果在主轴装调实训过程中发现故障或问题,需要进行故障分析,并采取相应的排除方法。
以上是主轴装调实训的一些基本内容和步骤,希望对您有所帮助。
新代系统主轴定位参数调整步骤

新代系统主轴定位参数调整步骤大家好,今天咱们聊聊新代系统主轴定位参数怎么调整。
说实话,这个过程有点像调试音响,稍微调偏一点,效果就大相径庭了。
咱们一步一步来,保证你能搞定这项工作,事半功倍!1. 准备工作1.1 确认工具首先,咱们得确认工具都准备好了。
没错,主要的就是调整仪器和相关的测量工具,比如说指示表、千分尺这些。
确保它们都能正常使用,不然到时候调试了半天发现工具有问题,那就真的是徒劳无功了。
1.2 检查设备接下来,得检查一下设备本身。
这个步骤是至关重要的,因为如果设备本身有问题,那调整参数基本上就是白费劲。
检查设备的各个部分,尤其是主轴和相关的连接部分,看看有没有松动或者磨损的情况。
如果有问题,先解决这些问题再开始调整。
2. 主轴定位参数调整2.1 调整步骤开始调整主轴定位参数的时候,得一步步来,不要急。
首先,打开系统界面,找到主轴定位参数设置的选项。
一般来说,这些设置在控制面板或者软件的设置菜单里都能找到。
2.2 进行调整1. 位置校准:先做位置校准。
把主轴移动到一个确定的位置,然后记录下它的实际位置。
这一步就像是给设备做个体检,看看它现在的状态是什么样的。
2. 设定参数:然后根据实际需要设定参数。
这里可能需要参考设备的说明书,看看不同参数的设定对设备的影响。
调整的时候,最好一次调整一个参数,避免搞混了设置。
3. 测试运行:调整完参数后,进行测试运行。
看一看设备在实际运行中的表现如何。
如果发现问题,就回到调整步骤,重新校准,直到达到满意的效果为止。
2.3 注意事项在调整过程中,有几个注意事项需要记住:稳定性:每次调整完参数后,确保主轴的位置稳定。
设备如果不稳定,那测试的结果也就不准确。
细节检查:注意每一个小细节,比如说调整的幅度、位置的精确度等等,这些都可能影响最终的效果。
记录数据:每次调整完毕,最好都记录一下数据,以便后续检查和对比。
如果遇到问题,可以从记录中找出原因。
3. 结束工作3.1 总结调整结果调整完成后,别急着离开。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
蒙德驱动器主轴(MF )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二. 参数设置以及自学习:(空载或者轻载的情况下)
1. 输入密码OP8=0000
2.初始化OP4=0,按两下
;OP4=100, 按两下。
(出厂已经设置好)
P2.加减速时间
P3.ASR特性
在电机不振动的情况下尽量调大P3.01-P3,.03,调小P3.04-P3.06,以提高刚性和响应性P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视U2.06有没有的脉冲值0~360.0变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4. 自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6,面板显示可以设置试运行的频率,设定好频率之后,长按着
电机将以设定的频率正向运行;长按着
运行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小
则为正常。
注:如果试运行过程中电机振动,请将E5.01、E5.02、E5.03的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
5.5KW及以下(小机壳):
三相电源
340-420V
50/60Hz
CN2端口
(控制脉冲输入
/脉冲反馈输出)模拟量输入
/输出接口
晶体管输出接口
DC48V 50mA以下
7.5KW及以上(大机壳):
TM2端口
三相电源340-420V 50/Hz
T
S ~+10V 』
以下
TM3端口
(模拟量输出接口)TM1端口
(功能输出接口)
TM3端口
30mA
30m 以下』
~+10V 』。