工业机器人PCB异形插件工作站
《工业机器人工作站》课件

欢迎来到《工业机器人工作站》PPT课件!在本课件中,我们将探索工业机器 人工作站的概述、组成、功能、应用领域、优势和益处、选购要点和注意事 项,并通过实例分析工作站在企业中的应用案例。让我们开始吧!
工业机器人工作站的概述
工业机器人工作站是一种专门设计用于与工业机器人协同工作的工作站。它提供了操作界面、程序管理、安全 保护、数据监控和智能控制等功能。
结论和总结
通过本课件,我们了解了工业机器人工作站的概述、组成、功能、应用领域、 优势和益处、选购要点和注意事项,并通过实例分析了工作站在企业中的应 用案例。工业机器人工作站在现代制造业中发挥着重要的作用,将来还有更 广阔的发展空间。
操作界面
安全保护
工作站配备直观易用的操作界面, 可让操作员轻松控制机器人的运 动和功能。
工作站具备多种安全措施,确保 操作员和机器人的安全。
数据监控
工作站可以监控和记录机器人的 关键数据,以优化工作流程和提 高生产效率。
工作站的组成和功能
控制器
工作站配备先进的机器人控制器,提供远程控 制和编程功能。
实例分析:工作站在企业中的应用案例
1
案例一
Байду номын сангаас
某汽车制造公司引入机器人工作站,将
案例二
2
传统的焊接工艺改造为自动化焊接,大 大提高了焊接质量和生产效率。
一家电子公司采用机器人工作站进行电
路板组装,有效降低了零件损耗率,提
高了产品质量。
3
案例三
一家食品加工企业使用机器人工作站进 行包装,实现了标准化包装,提高了生 产效率和产品外观。
改善安全性
工作站的安全措施能够保护操 作员和机器人的安全。
DS-01型异形插件工作站的使用

公司:北京华航唯实机器人科技有限公司 日期:2017.04
一、工作站的组成
二、工作站的开启与关闭
1.1、工作站的开启 1.2、工作站的关闭
三、空压机及气路系统的使用
2.1、空压机开启流程 2.2、空压机关闭流程 2.3、压力表数值显示
四、螺丝供料单元的使用
3.1、锁螺丝机的组成单元 3.2、锁螺丝机的工作原理 3.3、锁螺丝机的使用步骤
1/15
一 工作站的组成 1.1 工作站的组成
2/15
二 工作站的开启与关闭 2.1 工作站的开启
依次合闸:
QF1
QF2
QF3
QF4
3/15
2.1 工作站的开启
旋转钥匙开关置于“手动模式”
旋转开关置“ON”,控制柜上电
4/15
2.2 工作站的关闭
首先确认ABB机器人“防护装置停止”
选择“重新启动”
5/15
2.2 工作站的关闭
点击“高级”
选择“关闭主计算机”
6/15
2.2 工作站的关闭
点击“关闭主计算机”
旋转开关至“OFF”,控制柜断电
7/15
2.2 工作站的关闭
依次断电:
QF4
QF3
QF2
QF1
8/15
三 空压机及气路系统的使用 3.1 空压机开启流程
旋转空压机球阀手柄
向D方向移动滑阀
9/15
3.2 空压机关闭流程
旋转空压机球阀手柄
向C方向移动滑阀
10/15
2.3 压力表数值显示
压力的正常工作范围 应为 0.4~0.6Mpa。
11/15
三 螺丝供料单元的使用 3.1 锁螺丝机的组元
中职机器人技术应用赛项样题

2018年湖南省职业院校技能大赛机器人技术应用(中职组)竞赛任务书样题选手须知:1.任务书共22页,如出现任务书缺页、字迹不清等问题,请及时向裁判示意更换。
2.竞赛任务过程配有1台计算机,安装有竞赛任务要求的“RobotArt竞赛版"软件(任务书中所述离线编程软件均指RobotArt).3.竞赛用参考资料(ABB机器人编程手册、Omron视觉操作手册等)放置在“D:\参考资料”文件夹中.4.参赛队应在4小时内完成任务书规定的所有内容,选手在竞赛过程中创建的软件程序文件务必存储到“D:\技能竞赛”文件夹中,未存储到指定位置的运行记录或程序文件均不予给分。
5.选手提交的竞赛任务书仅可用竞赛场次和赛位号进行标识,不得出现学校、姓名等与身份有关的信息或与竞赛过程无关的内容,否则成绩无效。
6.由于参赛队人为原因导致竞赛设备损坏,以致无法正常继续比赛,将取消参赛队竞赛资格。
竞赛场次:第场赛位号:第号竞赛平台简介“机器人应用技术”赛项(中职组)的竞赛平台为“CHL-DS-01型工业机器人PCB异形插件工作站”,如图 1所示,该设备以桌面式关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有4种不同工艺应用的工艺工具以及涂胶单元、搬运码垛单元、异形芯片原料单元、异形芯片装配单元、视觉检测单元、PLC总控系统、安全光栅及操作面板等组件,如图 2所示,同时螺丝供料机、供气系统和电源组件布置于工作站台架内部.图 1 工业机器人PCB异形插件工作站图 2 工作站布局工业机器人PCB异形插件工作站以3C典型产品的生产装配过程为主线,包含了涂胶、搬运码垛、视觉分拣、装配、锁螺丝、检测等工艺过程,所有涉及设备均合理布置在工作站台面上,方便查看设备状态和操作编程。
工作站以3C行业最典型的异形芯片插件工艺过程为任务主线,产品由异形芯片零件、PCB电路板及盖板构成,如图 3所示。
图 3 电子产品PCB异形芯片插片产品竞赛时所提供的芯片共有4类,每类两种颜色,如图 4所示,按照芯片料库中的指定料槽摆放,如图 5所示。
工业机器人工作站的类型及应用

工业机器人工作站的类型及应用一、引言工业机器人是现代工业生产中不可或缺的一部分,其广泛应用于各个行业,提高了生产效率和质量。
而工业机器人工作站作为机器人的操作控制中心,起到了至关重要的作用。
本文将介绍工业机器人工作站的类型及其应用。
二、工业机器人工作站的类型1. 单机工作站单机工作站是最常见的一种工业机器人工作站,由单个工控台控制一个机器人。
它具有结构简单、操作方便、成本较低等优点。
适用于生产线上相对简单的任务,如装配、搬运、焊接等。
2. 多机工作站多机工作站是指一个工控台可以同时控制多个机器人的工作站。
它可以实现多个机器人之间的协同作业,提高生产效率。
适用于生产线上需要多个机器人进行配合工作的场景,如汽车制造、电子组装等。
3. 柔性工作站柔性工作站是一种可以快速调整和适应不同产品或任务的工作站。
它通常由多个可编程机器人、传感器和视觉系统组成,可以自动适应不同工作要求。
适用于需要频繁更换产品或进行定制生产的场景,如食品加工、医药包装等。
4. 协作工作站协作工作站是指机器人和人类在同一工作空间内共同完成任务的工作站。
它可以与人类工人进行安全、高效的合作,提高生产线的灵活性和生产力。
适用于需要人机协作的场景,如物料搬运、零件装配等。
三、工业机器人工作站的应用1. 汽车制造在汽车制造过程中,工业机器人工作站扮演着重要的角色。
它可以用于车体焊接、涂装、装配等环节,提高生产效率和产品质量。
多机工作站可以实现多个机器人同时进行车身焊接,柔性工作站可以适应不同车型的生产要求。
2. 电子组装在电子产品组装过程中,工业机器人工作站可以实现自动化的电路板插件、焊接和测试等任务。
多机工作站可以同时操作多个机器人进行高速、精确的组装工作,协作工作站可以与人类工人共同完成组装任务。
3. 食品加工工业机器人工作站在食品加工领域的应用越来越广泛。
柔性工作站可以根据不同的食品要求进行调整,实现自动化的分拣、包装和装盒等任务。
视觉系统可以用于检测和筛选不合格的食品,提高产品质量和安全性。
机器人技术应用 试卷九 2017中职-正式赛卷
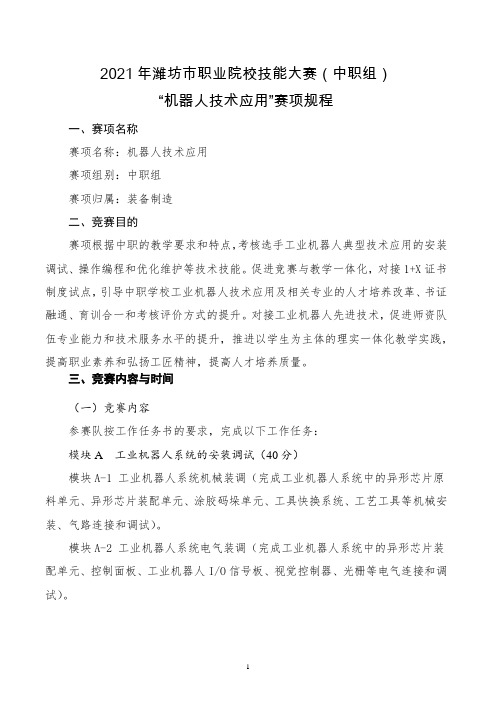
2017年全国职业院校技能大赛中职组机器人技术应用竞赛任务书(赛题九)选手须知:1.任务书共18页,如出现任务书缺页、字迹不清等问题,请及时向裁判示意,并进行任务书的更换。
2.参赛队应在4小时内完成任务书规定内容。
3.竞赛任务完成过程配有1台计算机,参考资料(工业机器人操作手册、视觉控制器操作手册、PLC控制器操作手册、工业机器人初始程序、PLC初始程序文件)放置在“D:\参考资料”文件夹中。
选手在竞赛过程中利用计算机创建的软件程序文件必须存储到“D:\技能竞赛”文件夹中,未存储到指定位置的运行记录或程序文件不作为竞赛成果予以评分。
计算机编辑文件实时存盘,建议10-15分钟存盘一次,客观原因断电情况下,酌情补时不超过十五分钟。
4.任务书中只得填写竞赛相关信息,不得出现学校、姓名等与身份有关的信息或与竞赛过程无关的内容,否则成绩无效。
5.由于参赛选手人为原因导致竞赛设备损坏,以致无法正常继续比赛,将取消参赛队竞赛资格。
竞赛场次:第场赛位号:第号竞赛平台简介2017年全国职业院校技能大赛中职组“机器人应用技术”赛项的竞赛平台为“工业机器人PCB 异形插件工作站(CHL-DS-01型)”,如图1所示,工作站以3C 典型产品的生产装配过程为主线,包含了涂胶、搬运码垛、视觉分拣、装配、锁螺丝、检测等工艺过程。
同时工作站集成配套了离线编程软件(RobotArt 竞赛版),软件中内嵌工作站等比例三维模型环境,可以直接实现计算机辅助编程应用,如图2所示。
图1 工业机器人PCB 异形插件工作站(CHL-DS-01)图2 RobotArt 竞赛版 (Version 3.0.0.1851)竞赛平台以桌面式关节型六轴串联工业机器人为核心,在其工作范围内合理分布有4种不同工艺应用的工艺工具以及涂胶单元、搬运码垛单元、异形芯片原料单元、异形芯片装配单元、视觉检测单元、PLC 总控系统、安全光栅及操作面板等组件,同时螺丝供料机、供气系统和电源组件布置于工作站台架内部。
(最新整理)全国职业院校技能大赛机器人技术应用竞赛
(完整)全国职业院校技能大赛机器人技术应用竞赛编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)全国职业院校技能大赛机器人技术应用竞赛)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)全国职业院校技能大赛机器人技术应用竞赛的全部内容。
2018年全国职业院校技能大赛“机器人技术应用"竞赛杭州市选拨赛赛项规程一、赛项名称赛项名称:机器人技术应用英语翻译:Robot technique and application赛项组别:中职组赛项类别:加工制造类二、赛项目的“机器人技术应用”赛项以工业机器人为核心部件,融合了工具快换、可编程逻辑控制器、气动技术、传感器、智能视觉检测等先进应用技术,以工业机器人在计算机/通讯/消费类电子产品行业(3C行业)中最典型的异形芯片插件工序为应用背景,以机械及电气的装调、工业机器人的维护和基础操作以及3C行业中典型的涂胶、码垛、分拣、装配等工作任务为考核内容,考察学生在工业机器人系统的安装、调试、编程、团队协作、质量控制及安全意识等方面的专业能力和职业素养,以及学生在工业机器人应用技术方面的综合职业能力。
通过竞赛,检验和展示中职院校工业机器人等相关专业教学改革成果以及学生的通用技术与职业能力,引导和促进中职院校相关专业的人才培养模式、教学模式和考核评价模式改革,有力促进工业机器人操作、编程、系统调试以及现场维护等岗位技术技能型人才的培养,助推中职院校在工业机器人领域的人才培养能力.三、竞赛内容“机器人技术应用"赛项竞赛内容围绕工业机器人及其系统的安装维护、操作调试、编程应用等内容,主要考察选手机电通用设备的机械及电气安装调试能力、工业机器人本体的基础操作和编程调试能力、利用计算机辅助软件对特殊应用工艺的简化编程及仿真能力、工业机器人结合PLC、视觉检测的综合应用及系统联调能力,同时在实操过程中运用专业知识均衡功能实现、动作效率、成本控制的综合能力,强化选手的安全和环保意识。
工业机器人工作站 ppt课件

PPT课件
26
第四节 工作站的气控系统
气控工作原理 : 手控阀 三联件
两套双支点支承两套夹 具体。
H 型支架下方四个定 位气缸支承定位。
PPT课件
24
(2)转台
交流伺服电机经减 速器和一对外齿轮 带动H型支架转动。
0°、180°位设两 套位置开关,超限 开关和死挡块。
导线及气管经转轴 中心孔引至H支架 处。
底座内装柔性链式 管路保护套。
PPT课件
25
(3)双支点系统
备通信。
电气控制柜:控制除机器人控制内容之
外的其他对象,并协调工作站工作。
1. 主电路分析
合上工作站开关:电源指示灯 HL3 亮;
电气柜风扇 M1 工作。
SA2、SA3控制两个照明灯。
SA1经KM使其他设备带电。
220V:
供PLC电源
变压整流→直流24V→输入、输出模块
110V供电磁铁用电(经中间继电器控制)
本例选:M-K6SB型 选择可搬重量因素:
末端执行器净重 末端执行器重心偏移 机器人最大速度及惯性
选择工作空间因素:
满足作业范围要求 工件置于机器人的最佳作业位置
PPT课件
9
二、机器人的传动与结构
传动示意:
S 轴:D1→R1
L 轴:D2→R2 U 轴:D3→R3 R 轴:D4→R4 B 轴:D5→R5 T 轴:D6→R6
7l轴电动机机器人下臂下端左侧与减速器输出盘连接右侧固连的小轴通过轴承支承在u轴连杆内减速器装在旋转体上极限位置安装极限挡块图右侧为u轴电动机减速器输出转盘与连杆连接下臂上臂拉杆和连杆构成平行四边形机构铰链中用园锥滚子轴承用闷盖调整轴承间隙并密封5r轴结构上臂前段用两圆锥滚子轴承支承于后段内
2021年潍坊市职业院校技能大赛中职组机器人技术应用赛项规程
2021年潍坊市职业院校技能大赛(中职组)“机器人技术应用”赛项规程一、赛项名称赛项名称:机器人技术应用赛项组别:中职组赛项归属:装备制造二、竞赛目的赛项根据中职的教学要求和特点,考核选手工业机器人典型技术应用的安装调试、操作编程和优化维护等技术技能。
促进竞赛与教学一体化,对接1+X证书制度试点,引导中职学校工业机器人技术应用及相关专业的人才培养改革、书证融通、育训合一和考核评价方式的提升。
对接工业机器人先进技术,促进师资队伍专业能力和技术服务水平的提升,推进以学生为主体的理实一体化教学实践,提高职业素养和弘扬工匠精神,提高人才培养质量。
三、竞赛内容与时间(一)竞赛内容参赛队按工作任务书的要求,完成以下工作任务:模块A 工业机器人系统的安装调试(40分)模块A-1 工业机器人系统机械装调(完成工业机器人系统中的异形芯片原料单元、异形芯片装配单元、涂胶码垛单元、工具快换系统、工艺工具等机械安装、气路连接和调试)。
模块A-2 工业机器人系统电气装调(完成工业机器人系统中的异形芯片装配单元、控制面板、工业机器人I/O信号板、视觉控制器、光栅等电气连接和调试)。
模块A-3工业机器人系统建模(根据实际布局情况,在离线编程软件中完成系统设计和硬件环境的搭建)。
模块B 工业机器人系统的集成应用(50分)编写工业机器人程序和PLC 程序,设计触摸屏,对视觉智能检测参数设置及流程编制,在离线编程软件中仿真设计,并实际验证分步运行产品生产的工艺全流程。
模块B-1 产品的外壳涂胶模块B-2 产品的码(拆)垛模块B-3 产品异形芯片装配(异形芯片的拾取、检测、排序、分拣、安装、调整等)。
模块B-4 产品盖板装配与出入库(盖板的拆卸、安装、螺丝锁固等,产品的检测、反馈、调整、出库和入库等)。
模块B-5 产品生产优化与安全(产品生产工艺流程、生产效率的优化,全自动化生产,生产安全要求和急停报警功能等)。
模块C 工业机器人的维护维修(10 分)模块C-1 工业机器人参数标定(标定工具TCP参数等。
机器人焊接工作站

机器人焊接工作站机器人焊接工作站是一种自动化焊接设备,它通过预先编程的程序,能够完成各种焊接任务。
它具有高效、精准、稳定的特点,广泛应用于汽车制造、航空航天、电子电器等行业。
下面我们将详细介绍机器人焊接工作站的组成、工作原理以及应用领域。
首先,机器人焊接工作站由机器人、焊接设备、控制系统和安全系统组成。
机器人是整个工作站的核心,它能够根据预先设定的程序,进行精准的动作控制。
焊接设备包括焊枪、焊丝等,用于实际的焊接操作。
控制系统则负责指挥机器人和焊接设备的工作,保证整个焊接过程的稳定性和精准度。
安全系统则是为了保障操作人员和设备的安全,包括防护罩、安全传感器等。
其次,机器人焊接工作站的工作原理是通过预先编程的程序,控制机器人和焊接设备的动作,实现焊接操作。
首先,操作人员需要设定焊接工艺参数和焊接路径,并将其输入到控制系统中。
然后,机器人根据这些参数和路径进行动作控制,完成焊接操作。
在整个焊接过程中,控制系统会实时监测焊接质量和设备状态,确保焊接质量和工作安全。
最后,机器人焊接工作站在汽车制造、航空航天、电子电器等行业有着广泛的应用。
在汽车制造领域,机器人焊接工作站能够实现车身焊接、零部件焊接等工艺,提高生产效率和焊接质量。
在航空航天领域,机器人焊接工作站能够完成航空器构件的精密焊接,确保航空器的安全性和可靠性。
在电子电器领域,机器人焊接工作站能够完成电子零部件的精细焊接,提高产品的稳定性和可靠性。
综上所述,机器人焊接工作站是一种高效、精准、稳定的自动化焊接设备,具有广泛的应用前景。
随着工业自动化水平的不断提高,机器人焊接工作站将在更多领域发挥重要作用,推动工业生产的发展。
河北省保定市第一批设备购置与更新改造贴息贷款项目清单表

保定学院重要教学仪器设备购置与更新改造项目
莲池区
胡连利
韩会玲
高等
7.3
7.3
为生化分析科技创新中心、物联网应用创新中心、融媒体中心、人工智能科创中心、机器人基础实验室、大数据实训中心、河北省大中小思政课一体化集体备课中心等教学科研平台和综合实训基地购置设备,更新已过或临近报废年限的教学、科研和实验实训设备。购置仪器设备37588台(套),主要满足本科生实验实训教学所需设备完善与更新,提升实践教学质量。
11
保定市徐水区职业技术教育中心教学科研设备购置项目
徐水区
王海波
职业
0.2009
0.2009
购置硬件设备支撑与数字化智慧校园配套设施1514台(套),其中数字化智慧校园具体包括:智慧校园基础平台数据中心、智慧校园应用管理系统、智慧校园教学学习应用平台及数据分析与预警。项目落成后将大大满足我校学生校内实训所需,提高教学及人才培养水平。
8
河北软件职业技术学院产教融合实训基地设备采购
莲池区
田明欣
马志峰
办公室0312-5097772
职业
3.302
3.302
设备主要用于产教融合实训基地设备购置,包括实训室设备采购,产业学院设备采购,国家级虚拟仿真实训基地建设及校园信息化建设等设备9417台(套),通过项目建设,强化学院数字化转型建设,打造一个高水平、专业化、开放型产教融合数字化人才培养实训基地,助力区域数据服务产业发展。
16
唐县职教中心新能源汽车实习实训设备购置项目
唐县
李为民
贾联合
职业
0.24
0.3
新能源汽车制造与检测是我校的骨干专业,专业计划购买纯电动汽车动力电机实训平台50台、纯电动汽车动力电池实训平台50台、纯电动汽车空调系统实训平台50台、纯电动汽车转向系统实训平台50台、纯电动汽车电器系统实训平台50台、油电混合动力驱动系统系统实训平台50台,用于新能源汽车专业实训教学,培养新能源汽车人才。
工业机器人工作站的集成设计--工作站集成方案的设计--毕业论文

编号XXXXXXX毕业论文题目学生姓名XXX学号XXXXX系部XXXXXXXXXX 专业XXXX班级XXX指导教师XXXX顾问教师XXX摘要摘要工业机器人技术在国内应用越来越广泛,而单一的工业机器人本体不能充分发挥其协同作业的功用,为了解决这一问题,将ABB工业机器人本体与搬运单元、码垛单元、打磨抛光单元、绘画单元以及安全单元等外围设备进行集成,实现了工业机器人与周围环境的信息交互。
本论文设计内容共六章,主要论述了工业机器人技术现状和发展趋势、工业机器人的技术基础、工业机器人工作站集成方案、工业机器人工作站集成安装与维护以及工业机器人工作站的调试过程。
实践表明:工业机器人工作站性能稳定,工作良好。
关键词:ABB工业机器人;集成;工作站;安装与维护;AbstractAbstractIndustrial robot technology in domestic are getting more and more, and not a single body of industrial robots and give full play to the coordination function, in order to solve this problem, ABB industrial robot and handling unit, palletizing unit, polishing unit, painting unit and peripheral equipment such as integrated security unit, to achieve the information exchange industry the robot and the environment. This thesis includes six chapters, mainly discusses the current situation and development trend of industrial robot technology, robot technology, industrial robot workstation based integration scheme, integrated industrial robot workstation installation and maintenance and debugging process of industrial robot workstation. The practice shows that the industrial robot workstation is stable and works well.Keyword:ABB; Integrate; Workstation;Installation and maintenance目录目录摘要 (I)ABSTRACT .................................................................................................................. I I 第一章概述. (1)1.1课题研究背景 (1)1.2课题研究趋势 (2)1.3课题设计目的和意义 (3)1.4工业机器人的行业应用 (4)第二章工业机器人的技术基础 (9)2.1工业机器人的结构 (9)2.2工业机器人的控制器及控制系统 (11)2.3工业机器人的示教器 (11)2.4工业机器人的技术参数 (12)2.4.1自由度 (12)2.4.2分辨率 (13)2.4.3分辨率 (13)2.4.4作业范围 (13)2.4.5运动速度 (13)2.4.6承载能力 (14)2.5工业机器人的类型 (14)2.5.1直角坐标机器人 (14)2.5.2柱面坐标机器人 (16)2.5.3极坐标机器人 (16)2.5.4多关节型机器人 (17)2.6工业机器人的控制方式 (19)2.7工业机器人的驱动方式 (19)第三章工业机器人工作站集成方案设计 (21)3.1工业机器人工作站总体方案 (21)3.1.1 工业机器人工作站 (21)3.1.2 工业机器人工作站的技术参数 (21)3.1.3 工业机器人工作站集成材料 (22)3.2工业机器人的本体 (23)3.3工业机器人的控制柜 (24)3.4工业机器人的示教器 (24)3.5工业机器人的手爪 (25)3.6工业机器人的作业机构 (27)3.7工业机器人的安全单元 (29)3.8工业机器人的电气系统 (30)3.9工业机器人的气动系统 (30)3.10工业机器人的工作台 (30)目录第四章工业机器人工作站集成安装与维护 (31)4.1工业机器人的搬运 (31)4.2工业机器人的安装 (32)4.3工业机器人工作站电气系统安装 (33)4.4工业机器人的工作站维保 (36)第五章工业机器人工作站的调试 (39)5.1工业机器人调试说明 (39)5.1.1工作站开机说明 (39)5.1.2工作站自动操作 (39)5.2工业机器人调试说明 (39)第六章总结与展望 (44)6.1系统的先进性 (44)6.2系统的社会效益 (44)6.3本人收益 (45)致谢 (47)参考文献 (48)第一章概述第一章概述1.1 课题研究背景其实在很早很早以前,就有类似机器人的机器出现,只不过不是以人的模样出现,所以就没有所谓的机器人。
工业机器人工作站系统集成课件

• 工业机器人工作站系统集成概述 • 工业机器人工作站系统集成技术 • 工业机器人工作站系统集成案例分
析
• 工业机器人工作站系统集成发展趋 势与挑战
• 工业机器人工作站系统集成实践与 操作
01
工业机器人工作站系统集成概述
定义与特点
定义
工业机器人工作站系统集成是将 机器人工作站中的各个组成部分 进行优化组合,形成一个高效、 稳定、可靠的整体系统。
物流行业应用案例
总结词
物流行业是工业机器人工作站系统集成的另一个应用领域,主要用于自动化仓库管理、 货物搬运等工作。
详细描述
在物流行业中,工业机器人工作站系统集成可以实现高效、高精度的自动化搬运。例如 ,在自动化仓库管理中,机器人可以快速、准确地完成货物的上架、下架、分拣等工作 ,提高仓库管理效率和货物处理速度。在货物搬运中,机器人可以快速、准确地完成货
04
工业机器人工作站系统集成发展 趋势与挑战
技术发展趋势
智能化
随着人工智能技术的不断发展,工业机器人工作站系统集成将更 加智能化,能够自主完成更复杂的任务,提高生产效率。
模块化
为了便于维护和升级,工业机器人工作站系统集成将趋向于模块化 设计,不同功能模块可灵活组合,满足不同生产需求。
集成化
随着工业物联网的普及,工业机器人工作站系统集成将更加注重与 其他生产系统的集成,实现数据共享和协同作业。
THANKS
感谢观看
1 2 3
技术标准不统一
目前工业机器人工作站系统集成缺乏统一的技术 标准,导致不同厂商之间的产品互通性差,增加 了集成的难度。
安全问题
随着工业机器人工作站系统集成的智能化程度提 高,网络安全问题日益突出,需要加强安全防护 措施。
2020年全国职业院校技能大赛(中职) 河北选拔赛机器人技术应用技能大赛赛项规程

2020年全国职业院校技能大赛(中职)河北选拔赛机器人技术应用技能大赛赛项规程一、比赛内容机器人技术应用赛项依据公布2018年国赛机器人技术应用赛项修改方案和教育部发布的《工业机器人领域职业教育合作备忘录》(教职成司函[2016]105号)中的推荐教学实训设备所规定的应知、应会等要求命题。
任务一机械及电气安装调试根据任务书要求,参考相应的图纸及技术标准,完成工业机器人本体、控制器和示教器的接线、安装及测试,机器人工具快换系统及4种工艺工具、异形芯片原料单元、异形芯片装配单元等部分的机械安装和电气安装,并对部分组件的动作进行调试和验证。
任务二工业机器人维护及操作根据任务书要求,对工业机器人本体1~6轴中某几个轴的精度标定数据的测量,并输入控制系统,完成工业机器人本体各轴精度标定。
使用尖点工具完成TCP参数的标定操作,并通过控制系统自动判定标定的平均误差。
任务三外壳涂胶及产品码垛根据任务书要求及技术标准,利用离线编程软件在三维环境中对工业机器人完成涂胶、搬运码垛的程序编制和动作仿真,机器人可通过工具快换系统在涂胶工具和搬运工具间自由切换,优化轨迹过程并碰撞检查无误后,利用竞赛平台验证程序效果,完成工艺任务。
任务四异形芯片分拣和安装根据任务书要求和技术标准,通过示教操作对工业机器人的动作流程进行编程,可使工业机器人根据功能要求在吸盘工具和锁螺丝工具间快速更换,准确抓取异形芯片、在视觉检测位置停留等待结果、根据要求将芯片安装到指定零件的指定位置、安装产品盖板并完成螺丝固定等工业机器人的动作流程。
任务五PLC编程、视觉设置及系统联调根据任务书要求和技术标准,通过对工业机器人、PLC、视觉检测进行编程和联调,实现对异形芯片的颜色特征参数的采集,引导工业机器人完成精确装配动作;通过PLC对装配单元的控制实现产品的功能检测,判断装配是否正确并通知工业机器人对损坏芯片进行更换;对工业机器人、PLC、视觉控制器进行通讯设置和联调,完成整体流程动作。
工业机器人虚拟仿真技术第3章 机器人虚拟仿真工作站构建

加载本地文件
导入工具模型:吸盘工具.tool 点击“打开”
二 、工作站对象的导入及布局
导入工具模型“吸盘工具.tool”,工具自动安装到机器人法兰上。
导入的工具模型,自动安装到法兰上
C 目录 ONTENTS
一、学习目标 二、工作站对象的导入及布局 三、创建工具模型及修改工具坐标系 四、创建工件坐标系及目标点 五四、、课课后后练练习习
参照对象 新建工作站 新建工作站 新建工作站 新建工作站 新建工作站
五、课后练习
使用本章节案例,练习以下内容: ② 练习2:创建工具模型 ,要求:工具坐标系值为【0,0,245,90,0,0】; ③ 练习3:创建工件坐标系,要求:坐标系名称为用户坐标系,数值为 【300, 150, 50, 90, 0, 0】; ④ 练习4:创建目标点,要求:目标点名称为原点,数值为 【-150, -102, 258,90, 0,180】
三 、创建工具模型及修改工具坐标系
创建工具模型的步骤:先导入工具的三维模型,然后创建工具模型。
加载本地文件
导入工具的三维数模,“吸盘工具.STEP”
三 、创建工,拖动到机器人对象上,工具将安装到机器人法兰上。
将三维模型拖动到机器人上,三维 模型变成工具模型
选择对象的三维模型“工作站”
单击“打开”
二 、工作站对象的导入及布局 – 工作站布局
工作站对象的布局:双击打开对象属性界面,修改对象的位置。
双击导入的对象,打开对象的属性界面
在属性界面中,修改位置数据,实现 工件的布局
二 、工作站对象的导入及布局 – 机器人模型导入
RoboDK中机器人模型是特定的模型(robot格式)。机器人模型的导入步骤:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人PCB异形插件工作站1产品介绍当前社会,信息化和互联网已经深入到每一个人的生活中,以电脑、通讯、消费性电子为主的3C产品消费也成为人们的最大消费之一。
由于3C产品品目繁杂、订单化生产、产品质量要求高,使得生产企业在实际制造过程中需要依赖大量的操作工人,在规定的较短时间内完成动作单一重复性工作,劳动量强度极大。
随着大量采用高响应驱动技术和轻量化结构设计,桌面式低负载工业机器人已成功应用于3C电子产品的生产制作过程中,代替人工完成动作单一、劳动强度大的分拣、安装、检测等工序,提高产品生产效率并保证高良品率。
工业机器人PCB异形插件工作站,如图1所示,以桌面式关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有4种不同工艺应用的机器人工具以及涂胶单元、搬运码垛单元、异形芯片原料单元、异形芯片装配单元、视觉检测及光源单元、螺丝供料单元、总控系统及操作面板等组件。
工作站深度集成了离线编程技术,软件中不仅包含了与硬件平台的相符三维模型资源,还大大简化了涂胶及搬运码垛工艺实现的编程应用过程、提高轨迹复现精度、避免发生碰撞干涉。
工作站包含了涂胶工艺、搬运码垛工艺、分拣工艺、装配工艺等工业机器人最典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。
图1工业机器人PCB异形插件工作站工业机器人PCB异形插件工作站融合了工业机器人维护及操作、系统安装及调试、现场示教编程及调试、离线编程及应用等技能要求,以3C行业最典型的异形芯片插件工艺过程为任务主线,产品分为异形芯片零件、PCB电路板和盖板代表不同产品,采用模拟化设计提高装配产品的复用率,如图2所示。
图2电子产品PCB异形芯片插片产品2整体技术参数●输入电源:交流单相220V,频率50Hz●额定功率:5kW●安全保护:急停开关、漏电保护、短路保护、过载保护●整体尺寸:2200mm×1350mm×1500mm3实训项目●工作站结构认知●关键设备的特性和参数设置●工业机器人手动控制及基本参数设置●工业机器人IO通信及总线通信●工业机器人单轴运动与线性运动控制●工业机器人工具TCP参数标定●工业机器人工件坐标系参数标定及多坐标系切换●工业机器人多类型工具快速更换●简单平面轨迹、复杂空间轨迹编程●物料搬运与码垛实训●产品外壳涂胶实训●零件颜色、轮廓等视觉检测应用实训●零件尺寸、位置等视觉检测应用实训●锁螺丝装配实训●基于RobotArt的工作站模型环境搭建与配置●基于RobotArt的涂胶离线编程应用●基于RobotArt的搬运码垛工艺离线编程应用4主要配置●工业机器人:ABB IRB 120●PLC:SIEMENS●模拟工艺:码垛、涂胶、分拣、装配●机械快换●视觉检测●气动组件●电气组件5核心功能工业机器人PCB异形插件工作站以3C典型产品的生产装配过程为主线,包含了涂胶、搬运码垛、视觉分拣、装配、锁螺丝、检测等工艺过程,所有涉及设备均合理布置在工作站台面上,方便查看设备状态和操作编程,布局方式如图3所示。
图3工业机器人PCB异形插件工作站布局工作站选用桌面型工业机器人用来将所有加工工序串联起来,可根据学校需求更换不同品牌近似规格型号的产品,为确保设备使用一贯性和稳定性,采用瑞士ABB品牌的IRB 120型,如图4所示,小巧灵活特性使其广泛应用于3C、电子、食品等行业,同时较小的工作半径和额定负载,在保证功能实现效果的前提下,确保教学和竞赛安全,防止发生人员以外,满足工作站使用要求。
ABB IRB 120机身表面光洁,便于清洗;空气管线与用户信号线缆从底脚至手腕全部嵌入机身内部,易于机器人集成。
其采用对称结构,第2轴无外凸,回转半径极小,可靠近其他设备安装,纤细的手腕进一步增强了手臂的可达性。
图4 ABB工业机器人 IRB 120IRC5紧凑型控制器在最小的空间内融合了多项技术优势,如优异的运动控制能力、高度灵活的RAPID语言等,如图5所示。
IRC5紧凑型控制器除节省空间之外,还通过设置单相电源输入、外置式信号接头及内置式可扩展16路I/O系统,简化了调试步骤。
确保操作员安全是IRC5紧凑型控制器的核心任务,经第三方检验认证,满足所有相关标准。
IRC5紧凑型控制器以先进的动态模型为基础,优化了机器人性能,可大幅缩短节拍时间、提高路径精度。
机器人运行路径不受速度影响,无需程序员调试,机器人即自动达到可预测的优异性能,真正实现所编即所得。
RAPID程序语言是简易性、灵活性和功能性的完美融合,支持结构化程序,适合车间应用,包含诸多高级功能,为各类工艺应用提供强大支持。
IRC5紧凑型控制器支持先进的现场总线,在任何工厂网络中都是一个性能良好的节点。
图5 ABB IRC5 紧凑型控制器FlexPendant(示教器)以简洁明了、直观互动的彩色触摸屏和3D操纵杆为设计特色,拥有强大的定制应用支持功能,可加载自定义的操作屏幕等要件,无需另设操作员人机界面,如图6所示。
图6 ABB FlexPendant示教器工业机器人工具种类直接决定了工业机器人的应用功能,如图7所示,4种不同功能的工具覆盖了PCB异形芯片插片生产的完整过程,多个工具都采用复合设计,以实现不同的工艺功能。
所有工具均采用工业级工具快换系统,实现了无需人为干预,工业机器人可在不同工具间自由切换,同时确保气路、电路信号通信正常,大大扩展了工业机器人的应用能力。
涂胶工具采用仿形设计,内部安装可轴向移动的颜色笔可以在涂胶模块上按轨迹要求涂绘;夹爪工具利用气缸驱动,采用平行二指形式,可以稳定夹取码垛物料;吸盘工具采用双功能设计,即可稳定吸取异形芯片,又可吸取盖板;锁螺丝工具可以将供螺丝组件提供的螺丝按照指定锁紧力矩将盖板和PCB电路板锁固。
图7工具快换系统及工具涂胶单元是将工业机器人对产品装配前的涂胶工艺进行功能抽象化,工业机器人抓持涂胶工具沿具有弧形曲面的面板上合理布置不同产品外轮廓轨迹上模拟工艺过程,如图8所示,保证工艺真实性同时增加教学可行性和趣味性。
利用涂胶模块和所提供的不同内容的轨迹图纸,利用涂胶工具,同时可以完成工业机器人脱离工艺应用的基础操作和编程教学应用。
图8涂胶单元搬运码垛单元是将工业机器人对产品搬运码垛工艺进行功能抽象化,工业机器人抓持夹爪工具将已完成生产的方形产品由原料台按照要求搬运码垛到指定位置,如图9所示,提供两种不同类型的仓储料库,可以模拟传送带队列式供货和平台堆垛,通过对物料转移过程和堆垛形式的要求增加教学多样性,提高编程复杂度。
图9码垛单元异形芯片原料单元用于存放不同类型的异形芯片,通过形状不同代表不同种类、颜色不同代表不同型号,异形芯片装配单元提供多个装配工位,如图10所示,分别用于不同产品的装配和检测。
不同产品对芯片种类、数量的要求不一,需要工业机器人根据要求从异形芯片原料单元中选取所需的芯片后放置到指定位置,在完成所有芯片的安装后,为产品安放盖板并锁紧固定螺丝。
图10异形芯片原料单元及装配单元视觉检测及光源单元可以对工业机器人所选取芯片的颜色、形状、位置等信息进行检测和提取,如图11所示,并将检测结果传输给工业机器人,以辅助其完成后续动作。
视觉镜头配套检测光源,可以尽量避免环境光源对检测结果的影响。
采用倒置式安装,可以使机器人手持零件进行检测,减少周边配套设备,简化机器人轨迹动作。
图11视觉检测单元工作站为方便教学和竞赛使用,在平台上布置了云监控,如图12所示,利用互联网可将设备的实时操作过程在大尺寸教学终端中进行展示,避免了集中式教学学生围观又无法切实看清教师操作过程的问题,也可以在竞赛过程中实现直播提高观赏度,同时方便教师对学生的操作流程进行实时点评,提高教学指导效果,存储在系统中的录像实现对操作过程可追溯,为竞赛过程中争议事件提供佐证材料。
同时,在工作站操作正面,利用线性光栅作为安全保护措施,当操作人员进入危险区域时,工作站会蜂鸣报警,并降低工业机器人运动速度,甚至触发急停,以避免危险发生。
图12云监控及安全光栅配套工具如图13所示,具体参数如下:工具箱1个、内六角扳手1套、250mm活动扳手1把、17mm/19mm开口扳手1把、13mm开口扳手1把、5.5mm开口扳手1把、螺丝刀1套、5米卷尺1个、斜口钳1把、Y型端子钳1把、裸端型端子钳1把、剥线钳1把、美工刀1把、万用表1个、PLC编程线1根、触摸屏编程线1根、程序拷贝U盘1个图13配套工具离线编程软件选用国内首款中文界面的RobotArt工业机器人离线编程软件,采用独家解算算法并已申请软件著作权,集成了计算机三维实体显示、系统仿真、智能轨迹优化、运动控制代码生成等核心技术,使得工业机器人获得了更加强大的“大脑”,可以轻松应对复杂轨迹的高精度生成和复现,在计算机上完成轨迹设计、规划、运动仿真、碰撞检查、姿态优化,最后直接生成工业机器人控制器所需的执行运动代码,同时还提供了方便的轨迹整体优化、工艺过程设计和空间校准算法,缩短了工业机器人的停机调试时间,为工业机器人实现更广泛的应用提供技术支撑。
工业机器人离线编程软件1 软件概述随着工业机器人技术的发展,高精度、高性能、高智能工业机器人相继问世,助其不断地扩展应用领域。
不同于简单的物料搬运、码垛应用,新兴工业机器人应用需要更高精度轨迹和复杂工艺支持,导致了传统示教编程和语言编程无法完全满足。
同时在线操作和调试使得工业机器人必须停机配合,致使生产线停产,造成企业损失。
工业机器人离线编程技术集成了计算机三维实体显示、系统仿真、智能轨迹优化、运动控制代码生成等核心技术,使得工业机器人获得了更加强大的“大脑”,可以轻松应对复杂轨迹的高精度生成和复现,在计算机上完成轨迹设计、规划、运动仿真、碰撞检查、姿态优化,最后直接生成工业机器人控制器所需的执行运动代码,同时还提供了方便的轨迹整体优化、工艺过程设计和空间校准算法,缩短了工业机器人的停机调试时间,为工业机器人实现更广泛的应用提供技术支撑。
RobotArt工业机器人离线编程软件,华航唯实掌握核心算法并申请了软件著作权,如图14所示,已经在工业机器人应用领域取得初步成功,切实解决了实际应用问题,打破了国外软件垄断局面。
RobotArt充分考虑到软件应用特点,实现了功能最优化、使用简易化、界面人性化、操作统一化,在教育领域为学校提供教育版,提供专业的技术支持和二次开发服务,实现教学功能定制化。
图14RobotArt软件著作权2 推荐硬件配置要求●操作系统:Windows 7/Windows 8/Windows 8.1/Windows 10(32bit/64bit)●网络要求:程序运行过程中稳定访问互联网●CPU:Intel i5及以上,主频3.2GHz●内存:DDR4 8GB●显卡:NVIDIA GT720显示芯片,独立2GB显示内存●参考电脑型号:联想扬天A6860f,戴尔V3000-24N8,惠普580-056cn等3 特色功能3.1 多品牌工业机器人离线编程功能RobotArt采用独家解算算法,可以支持市面上所有品牌工业机器人的离线编程操作,目前模型库中已附带KUKA、ABB、STAUBLI、广州数控、新时达等品牌工业机器人模型,可以导入三维模型并进行轨迹规划,采用通用化空间正逆解算算法真实仿真运动过程,一键即可完成复杂的程序编译过程,直接生成运行所需要的控制代码文件,如图15所示,简化工业机器人编程过程,统一编程接口,提高应用效率。