L3G4200D中文数据手册
陀螺仪芯片手册L3G4200D亲手译

L3G4200D MEMS 运动传感器: 超稳定的三轴数字输出陀螺仪
特点
■三种可选的全尺度(250/500/2000DPS) ■I2C/SPI 数字输出接口 ■16 比特率值的数据输出 ■8 位温度数据输出 ■两个数字输出线(中断和数据就绪) ■集成的低和高通滤波器与用户可选择带宽 ■超稳定的温度和时间 ■宽电源电压:2.4 V 至 3.6 V ■低电压兼容的 IOS(1.8 伏) ■嵌入省电和睡眠模式 ■嵌入式温度传感器 ■嵌入式 FIFO(先入现出堆栈) ■高冲击的生存能力 ■扩展的工作温度范围(-40℃至+85℃) ■ECOPACK® RoHS 和“绿色”兼容
5.2.2 SPI 写………………………………25 5.2.3 SPI 读三线模式…………………………26 6 输出寄存器映射…………………………27 7 寄存器的描述…………………………29 7.1 WHO_AM_I(0FH)……………………………… … 29 7.2 CTRL_REG1(20H)……………………………… 29 7.3 CTRL_REG2(21H)……………………………… 30 7.4 CTRL_REG3(22H)……………………………… 31 7.5 CTRL_REG4(23H)……………………………… 32 7.6 CTRL_REG5(24 小时)……………………………… 32 7.7 参考/ DATACAPTURE(25H)……………………34 7.8 OUT_TEMP(26H)……………………………… 34
应用
■游戏和虚拟现实输入设备 ■运动控制与人机界面(人机接口) ■全球定位导航系统 ■家电和机器人技术
说明
L3G4200D 是一种低功耗三轴角 速率传感器能够提供前所未有的 安然的零利率水平和灵敏度超过 温度和时间…它包括一个传感 元素,并能够提供一个 IC 接口 外部世界的测角速率 通过数字接口(I2C/SPI)…
L3G4200D 51单片机IIC 测试程序

//这是L3G4200D 51单片机IIC 测试程序//这是1602 头文件保存为1602.h#define DataPort P0 //LCD1602数据端口sbit LCD_RS=P2^4; //LCD1602命令端口sbit LCD_RW=P2^5; //LCD1602命令端口sbit LCD_EN=P2^6; //LCD1602命令端口#include <INTRINS.H>#define uchar unsigned charvoid WaitForEnable(void){DataPort=0xff;LCD_RS=0;LCD_RW=1;_nop_();LCD_EN=1;_nop_();_nop_();while(DataPort&0x80);LCD_EN=0;}void WriteCommandLCD(uchar CMD,uchar Attribc) {if(Attribc)WaitForEnable();LCD_RS=0;LCD_RW=0;_nop_();DataPort=CMD;_nop_();LCD_EN=1;_nop_();_nop_();LCD_EN=0;}void WriteDataLCD(uchar dataW){WaitForEnable();LCD_RS=1;LCD_RW=0;_nop_();DataPort=dataW;_nop_();LCD_EN=1;_nop_();_nop_();LCD_EN=0;}void InitLcd(){WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0c,1);}void DisplayOneChar(uchar X,uchar Y,uchar DData) {Y&=1;X&=15;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X,0);WriteDataLCD(DData);}//下面是主程序部分//*************************************** // L3G4200D三轴陀螺仪IIC测试程序// 使用单片机STC89C51// 晶振:11.0592M// 显示:LCD1602// 编译环境Keil uVision2// 参考宏晶网站24c04通信程序// 时间:2011年3月1日//**************************************** #include <reg52.h>#include "1602.h"#include <math.h>#include <stdio.h>#include <INTRINS.H>#define uchar unsigned char#define uint unsigned intsbit SCL=P1^0 ; //IIC时钟引脚定义sbit SDA=P1^1 ; //IIC数据引脚定义//********************#define WHO_AM_I 0x0F#define CTRL_REG1 0x20 // 0010 0000#define CTRL_REG2 0x21#define CTRL_REG3 0x22#define CTRL_REG4 0x23#define CTRL_REG5 0x24#define OUT_X_L 0x28#define OUT_X_H 0x29#define OUT_Y_L 0x2A#define OUT_Y_H 0x2B#define OUT_Z_L 0x2C#define OUT_Z_H 0x2D#define SlaveAddress 0xD2 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改typedef unsigned char BYTE;typedef unsigned short WORD;BYTE BUF[8]; //接收数据缓存区long temp;uchar ge,shi,bai,qian,wan; //显示变量int dis_data;//变量//int temp;void delay(unsigned int k);void InitL3G4200D(uchar ); //初始化L3G4200Dvoid conversion(uint temp_data);void Single_WriteL3G4200D(uchar REG_Address,uchar REG_data); //单个写入数据uchar Single_ReadL3G4200D(uchar REG_Address); //单个读取内部寄存器数据void Delay5ms();//void Multiple_readL3G4200D(void);//------------------------------------void Delay5us();void L3G4200D_Start();void L3G4200D_Stop();void L3G4200D_SendACK(bit ack);void L3G4200D_RecvACK();void L3G4200D_SendByte(BYTE dat);BYTE L3G4200D_RecvByte();void display_x();void display_y();void display_z();//-----------------------------------//********************************************************* void conversion(uint temp_data){temp_data*=0.875;wan=temp_data/10000+0x30 ;temp_data=temp_data%10000; //取余运算qian=temp_data/1000+0x30 ;temp_data=temp_data%1000; //取余运算bai=temp_data/100+0x30 ;temp_data=temp_data%100; //取余运算shi=temp_data/10+0x30 ;temp_data=temp_data%10; //取余运算ge=temp_data+0x30;}/*******************************/void delay(unsigned int k){unsigned int i,j;for(i=0;i<k;i++){for(j=0;j<121;j++){;}}}/*****************************************************************延时5微秒(STC90C52RC@12M)不同的工作环境,需要调整此函数,注意时钟过快时需要修改当改用1T的MCU时,请调整此延时函数**************************************/void Delay5us(){_nop_();_nop_();_nop_();_nop_();}/**************************************延时5毫秒(STC90C52RC@12M)不同的工作环境,需要调整此函数当改用1T的MCU时,请调整此延时函数**************************************//*void Delay5ms(){WORD n = 560;while (n--);}*//**************************************起始信号**************************************/ void L3G4200D_Start(){SDA = 1; //拉高数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 0; //产生下降沿Delay5us(); //延时SCL = 0; //拉低时钟线}/**************************************停止信号**************************************/ void L3G4200D_Stop(){SDA = 0; //拉低数据线SCL = 1; //拉高时钟线Delay5us(); //延时SDA = 1; //产生上升沿Delay5us(); //延时}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/void L3G4200D_SendACK(bit ack){SDA = ack; //写应答信号SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}/**************************************接收应答信号**************************************/void L3G4200D_RecvACK(){SCL = 1; //拉高时钟线Delay5us(); //延时while(SDA==1);SCL = 0; //拉低时钟线Delay5us(); //延时}/**************************************向IIC总线发送一个字节数据**************************************/void L3G4200D_SendByte(BYTE dat){BYTE i;for (i=0; i<8; i++) //8位计数器{SDA = dat&0x80; //送数据口dat=dat<<1;SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}L3G4200D_RecvACK();}/**************************************从IIC总线接收一个字节数据**************************************/BYTE L3G4200D_RecvByte(){BYTE i;BYTE dat = 0;SDA = 1; //使能内部上拉,准备读取数据,for (i=0; i<8; i++) //8位计数器{dat <<= 1; //这里的1是00000001SCL = 1; //拉高时钟线Delay5us(); //延时dat |= SDA; //读数据SDA 00000000 or 00000001SCL = 0; //拉低时钟线Delay5us(); //延时}return dat;}//单字节写入*******************************************void Single_WriteL3G4200D(uchar REG_Address,uchar REG_data){L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页L3G4200D_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页L3G4200D_Stop(); //发送停止信号}//单字节读取*****************************************uchar Single_ReadL3G4200D(uchar REG_Address){ uchar REG_data;L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(REG_Address); //发送存储单元地址,从0开始L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress+1); //发送设备地址+读信号REG_data=L3G4200D_RecvByte(); //读出寄存器数据L3G4200D_SendACK(1);L3G4200D_Stop(); //停止信号return REG_data;}//*************************************************/*void Multiple_readL3G4200D(void){ uchar i;L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress); //发送设备地址+写信号L3G4200D_SendByte(0x28); //发送存储单元地址L3G4200D_Start(); //起始信号L3G4200D_SendByte(SlaveAddress+1); //发送设备地址+读信号for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF{BUF[i] = L3G4200D_RecvByte()&0xFF; //BUF存储数据if (i == 5){L3G4200D_SendACK(1); //最后一个数据需要回NOACK}else{L3G4200D_SendACK(0); //回应ACK}}L3G4200D_Stop(); //停止信号Delay5ms();}*///*****************************************************************//初始化L3G4200D,根据需要请参考pdf,第27页,进行修改************************void InitL3G4200D(){Single_WriteL3G4200D(CTRL_REG1, 0x4f); // 0x0f=00001111 200hz普通模式X Y Z 启用。
kobuki通信协议
附录:协议说明综述Kobuki驱动程序与机器人通过预先设定好的协议进行通信。
通常,驱动会发送指令给机器人,并且得到机器人的反馈数据或传感器消息。
这些命令和反馈数据被转换为bytestream 通过串口通信。
通信协议规定了bytestream的规则和形式。
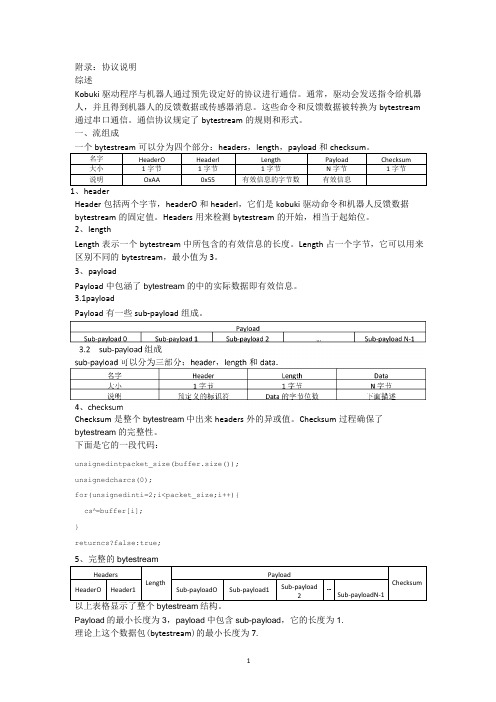
一、流组成一个bytestream可以分为四个部分:headers,length,payload和checksum。
Header包括两个字节,headerO和headerl,它们是kobuki驱动命令和机器人反馈数据bytestream的固定值。
Headers用来检测bytestream的开始,相当于起始位。
2、lengthLength表示一个bytestream中所包含的有效信息的长度。
Length占一个字节,它可以用来区别不同的bytestream,最小值为3。
3、payloadPayload中包涵了bytestream的中的实际数据即有效信息。
3.1payloadPayload有一些sub-payload组成。
Checksum是整个bytestream中出来headers外的异或值。
Checksum过程确保了bytestream的完整性。
下面是它的一段代码:unsignedintpacket_size(buffer.size());unsignedcharcs(0);for(unsignedinti=2;i<packet_size;i++){cs A=buffer[i];}returncs?false:true;5、完整的bytestreambytestreamPayload的最小长度为3,payload中包含sub-payload,它的长度为1.理论上这个数据包(bytestream)的最小长度为7.二、数据类型1、序列化—反序列化序列化是将数据结构转化为bytestream的过程,反序列化是一个逆转过程。
每个数据类型都通过LSB-Firstorder序列化和反序列化。
移动机器人视觉伺服系统上位机软件的设计与实现
移动机器人视觉伺服系统上位机软件的设计与实现仇翔;陈旭;刘安东;俞立【摘要】针对移动机器人视觉伺服系统,采用C++语言设计了一款基于Qt的跨平台实时数据可视化上位机软件;该软件执行图像处理算法和数据分析,实现绘制移动机器人实时轨迹和实时参数曲线等功能;首先介绍了移动机器人的硬件组成和功能;其次阐述了上位机软件的开发环境和设计步骤,并详细叙述图像算法的运行流程和实时在线绘制波形图等功能;最后通过视觉伺服跟踪控制实验采集数据,并实时显示来验证所设计上位机软件功能的有效性.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)004【总页数】5页(P106-110)【关键词】Qt;上位机;移动机器人;视觉伺服;数据可视化【作者】仇翔;陈旭;刘安东;俞立【作者单位】浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023;浙江工业大学信息工程学院,杭州 310023【正文语种】中文【中图分类】TP2420 引言移动机器人是具有一定自主执行相关动作能力的机械设备,其移动方式有两轮差分、四轮全向、履带或者腿式机械足等,具有一定范围内的自由移动和协作能力。
随着软硬件技术的快速发展,带有多种传感器的移动机器人在相关领域得到广泛的应用,如农业采摘机器人、乒乓球机器人、无人驾驶汽车等。
在农业科技行业中,视觉伺服草莓采摘机器人[1]利用视觉图像进行果实定位,视觉曝光信号触发控制卡,图像处理获取轮廓,因采摘场景中深度信息变化不大,使得视觉定位更加有效。
在体育科技行业中,乒乓球机器人的视觉伺服系统[2]利用视觉传感器信号作为反馈,获取图像特征直方图统计,采用快速轮廓搜索算法识别乒乓球,轨迹预测算法规划回球动作,完成乒乓球人机对战或双机对战任务。
在安防行业中,基于改进ORB的巡检机器人视觉算法[3]能有效的提取感兴趣区域,并可利用云台控制得到偏移像素,使识别更加精确。
MWC飞行控制器设置说明书
感谢选用克瑞斯MWC系列飞控!本手册将引导您从零开始,逐步安装、调整和飞行,并提供一些基本技巧,让您可以轻松掌握此高性价比飞控的使用经验。
本手册将会根据MWC程序的升级进行相应更新,如有需要,请打印出来阅读。
MWC对遥控器的功能有一定要求,通道数不少于5个,其中一个为两段式或者三段式开关,需要有通道中立点和行程调整功能。
从未使用过的MWC,需按照以下步骤设置和安装好,才能开始飞行时的调试:1.烧写Bootloader到飞控上的单片机,让飞控可以自由导入程序;2.用Arduino编辑MWC程序,然后用FTDI工具把程序上传到飞控;3.安装到机架上,接好所有相关的连接线;4.飞行前用MWC GUI配置程序,对飞控进行基本设置;5.外场飞行时用电脑、蓝牙模块或者LCD模块来调整PID及其他参数。
接下来将按照以上步骤开始配置您的飞控。
1.烧写Bootloader,我们已经在测试时烧好飞控的Bootloader,否则拿到手也启动不了,更没办法刷程序,所以您不必再理会这个。
如果您的Bootloader出现问题,导致无法启动飞控,请与我们联系。
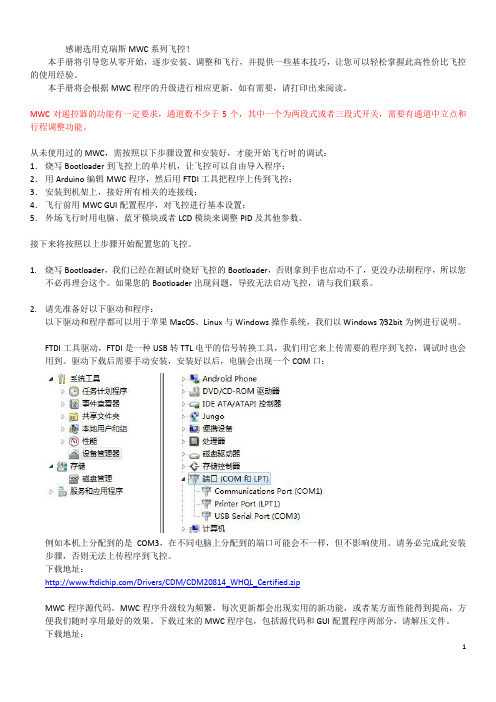
2.请先准备好以下驱动和程序:以下驱动和程序都可以用于苹果MacOS、Linux与Windows操作系统,我们以Windows 7/32bit为例进行说明。
FTDI工具驱动,FTDI是一种USB转TTL电平的信号转换工具,我们用它来上传需要的程序到飞控,调试时也会用到。
驱动下载后需要手动安装,安装好以后,电脑会出现一个COM口:例如本机上分配到的是COM3,在不同电脑上分配到的端口可能会不一样,但不影响使用。
请务必完成此安装步骤,否则无法上传程序到飞控。
下载地址:/Drivers/CDM/CDM20814_WHQL_Certified.zipMWC程序源代码。
MWC程序升级较为频繁,每次更新都会出现实用的新功能,或者某方面性能得到提高,方便我们随时享用最好的效果。
下载过来的MWC程序包,包括源代码和GUI配置程序两部分,请解压文件。
MD204L使用手册j简体中文版EW02CN02-081215

eviewmd204l用户手册第一章产品概述11功能12一般规格13各部分名称14外形尺寸及安装方法第二章编辑软件tp20021tp200概述211关于工程和画面212画面内容213tp200使用流程22编辑用户画面221创建工程222制作基本画面223md204l系统参数10224文本11225动态文本12226功能键画面跳转13227数据显示17228数据设定20229指示灯212210功能键开关量控制252211272212报警列表282213报警列表2923保存工程3024下载画面31第三章md204l操作方法31联机通讯3232切换画面3233系统口令3334修改数据3335开关量控制eviewmd204l用户手册第四章与plc的连接方法41三菱fx系列3742西门子s7200系列3843欧姆龙c系列3944光洋s系列4045施耐德neza系列4146台达dvp系列4247松下fp系列4348lgmasterk系列4449facon永宏系列eviewmd204l用户手册第一章产品概述11功能md204l是可编程序控制器的小型人机界面以文字或指示灯等形式监视修改plc内部寄存器或继电器的数值及状态
涡街流量计 电子版本: ER 2.0.0_ OPTISWIRL 4200 操作手册说明书

涡街流量计电子版本: ER 2.0.0_OPTISWIRL 4200操作手册© KROHNE 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh保留所有权。
未经KROHNE Messtechnik GmbH 公司事先书面授权,不得复制此文件及其任何部分。
如有更改,恕不通知。
2 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh版权所有 2017KROHNE Messtechnik GmbH - Ludwig-Krohne-Str. 5 - 47058 Duisburg (德国): 版本说明3 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh 1 安全须知61.1 软件历史 (6)1.2 用途 (7)1.3 认证 (9)1.4 压力容器指令 (10)1.5 来自制造厂家的安全须知 (11)1.5.1 版权及数据保护.............................................................111.5.2 免责条款...................................................................111.5.3 产品责任及质保.............................................................121.5.4 有关文档的信息.............................................................121.5.5 警告与符号使用 (13)1.6 操作者的安全须知........................................................132 设备描述142.1 供货范围 (14)2.2 仪表型号 (14)2.2.1 法兰型仪表.................................................................152.2.2 夹持型仪表.................................................................152.2.3 双测量系统型号和加倍的可靠性...............................................162.2.4 分体型.....................................................................162.2.5 带内缩径的仪表.............................................................172.2.6 设备描述...................................................................172.2.7 自由空气排气量检测 - FAD (可选)...........................................182.2.8 总热测量(可选)...........................................................192.2.9 净热测量(可选)...........................................................202.2.10 双密封 (21)2.3 铭牌....................................................................223 安装233.1 安装注意事项 (23)3.2 存储 (23)3.3 运输 (23)3.4 安装条件 (24)3.4.1 测量液体时应严禁的安装.....................................................253.4.2 测量蒸汽和气体时应严禁的安装...............................................263.4.3 带控制阀的管线.............................................................263.4.4 推荐安装位置 (27)3.5 最小进口直管段 (28)3.6 最小出口直管段 (29)3.7 整流器 (29)3.8 安装 (30)3.8.1 安装注意事项...............................................................303.8.2 夹持型仪表的安装...........................................................313.8.3 法兰型仪表的安装...........................................................323.8.4 分体型现场外壳的安装 (33)3.9 隔热层 (34)3.10 转动机壳 (35)3.11 旋转显示板 (36)内容4 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh4 电气连接374.1 安全须知 (37)4.2 连接信号转换器 (38)4.3 电气连接 (39)4.3.1 电源.......................................................................394.3.2 电流输出...................................................................394.3.3 电流输入...................................................................404.3.4 二进制输出.................................................................404.3.5 限位开关输出...............................................................414.3.6 脉冲输出 / 频率输出........................................................434.3.7 状态输出 (44)4.4 分体型的接线............................................................444.5 接地连接. (46)4.6 防护等级................................................................475 启动485.1 开机界面. (48)5.2 操作....................................................................486 操作496.1 显示和操作按键 (49)6.1.1 子菜单和功能选择的显示,3行 (50)6.1.2 参数设置的显示,4行 (51)6.1.3 预览参数时的显示,4行 (51)6.2 基本操作原理 (52)6.2.1 按键功能描述...............................................................526.2.2 从测量模式切换到菜单模式...................................................526.2.3 更改菜单中的设置...........................................................526.2.4 更改模式下的字符...........................................................536.2.5 单位,数字和常数...........................................................546.2.6 安全等级和权限 (54)6.3 最重要的功能及模块概览 (56)6.4 菜单语言 (56)6.5 气体测量选项 (57)6.6 单位 (58)6.7 菜单结构 (61)6.7.1 菜单”A 快速设置“ (61)6.7.2 菜单“B 测试” (62)6.7.3 菜单“C 设置” (64)6.7.4 菜单说明 “A 快速设置” (68)6.7.5 菜单说明 "B 测试" (75)6.7.6 菜单说明 ”C 设置“ (76)6.8 设置示例 (85)6.8.1 自由空气排气量检测-FAD 设置 (85)6.8.2 总热测量 (86)6.8.3 净热测量 (87)6.9 状态消息和诊断信息 (88)6.10 A12 分区检查 (92)5 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh 7 服务937.1 更换信号转换器/液晶显示屏 (93)7.2 O 型圈的维护 (94)7.3 备件可用性 (95)7.4 可提供的服务 (95)7.5 仪器送返生产厂家........................................................957.5.1 基本信息. (95)7.5.2 送返仪器时附带的表格(可复印) (96)7.6 处理....................................................................968 技术数据978.1 功能原理 (97)8.2 技术数据 (98)8.3 尺寸和重量 (103)8.3.1 法兰型 (103)8.3.2 夹持型 (110)8.3.3 分体型尺寸 (112)8.4 流量表 (113)16 08/2017 - 4004294802 - MA OPTISWIRL 4200 R04 zh1.1 软件历史对于所有仪表,根据 NE 53,“电子版本” (ER) 记录了电子设备版本状态。
四轴姿态解算
又花了将近一个星期,终于把姿态解算的框架完成了。
仅仅是把陀螺仪、加速度计、罗盘融合在一起,得出旋转姿态,没有对加速度积分,没有用到气压计,几乎没有滤波。
算是阶段性的工作吧,把框架设计得合理一点,以后添加/修改就很简单了。
从传感器的读取,到四元数的学习,到空间旋转的处理方法,循序渐进,逐个击破。
主要参考了以下资料(按阅读的时间循序):《计算机图形学几何工具算法详解》(四元数转矩阵的公式是错的!)《交互式计算机图形学——基于OpenGL的自顶向下方法》维基百科——四元数框框的日记——四元数青衫湮痕——四元数Heath's blog——四元数与欧拉角之间的转换阿莫电子论坛——【原创】姿态估计下面总结一下“姿态解算”的过程,分为“传感器”、“四元数与旋转”、“姿态解算框架”、“长期融合”、“快速融合”四部分。
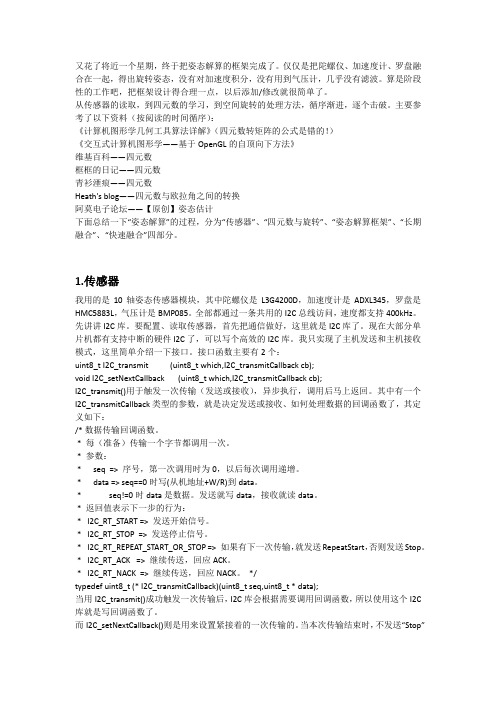
1.传感器我用的是10轴姿态传感器模块,其中陀螺仪是L3G4200D,加速度计是ADXL345,罗盘是HMC5883L,气压计是BMP085。
全部都通过一条共用的I2C总线访问,速度都支持400kHz。
先讲讲I2C库。
要配置、读取传感器,首先把通信做好,这里就是I2C库了。
现在大部分单片机都有支持中断的硬件I2C了,可以写个高效的I2C库。
我只实现了主机发送和主机接收模式,这里简单介绍一下接口。
接口函数主要有2个:uint8_t I2C_transmit (uint8_t which,I2C_transmitCallback cb);void I2C_setNextCallback (uint8_t which,I2C_transmitCallback cb);I2C_transmit()用于触发一次传输(发送或接收),异步执行,调用后马上返回。
其中有一个I2C_transmitCallback类型的参数,就是决定发送或接收、如何处理数据的回调函数了,其定义如下:/* 数据传输回调函数。
* 每(准备)传输一个字节都调用一次。
共立4200中文使用说明书
警告 使用过程中,若仪器发生裂痕,金属部分暴露时,请停止使用。 请勿对本仪器进行分解、改造、代用部件的安装,需要修理调整时请送至本公司或销售店。 请勿在潮湿状态下更换电池。 需更换电池打开电池盖时,请先关闭电源。 测试中,请勿碰触绝缘层(参照下图)上侧部分,可能有触电的危险。
注意 测试开始前,确认功能开关已调节至所需功能上。 请勿将本仪器放置于高温多湿、结露及阳光直射的场所。 使用后务必关闭电源,若长期不使用请取出电池后保管仪器。 清洗时,请勿使用研磨剂、有机溶剂,应使用浸泡过中性洗剂或水的布檫洗。 使用时请注意切勿使仪器受撞击(如掉落) ,否则可能使钳口受损。 请勿夹任何不符合要求的物体。
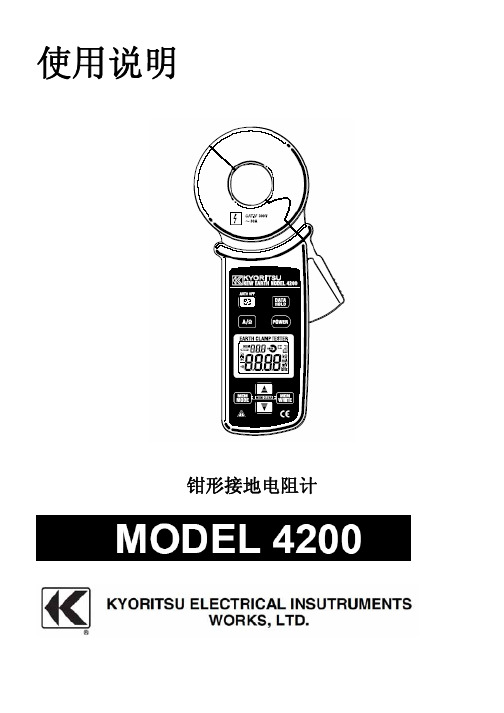
本仪器可测试多重接地方式的接地电阻。 (如下图所示) 。假设被测接地电阻为Rx,其它接地电阻为R1、R2、…Rn。
这些接地电阻中,可看成R1、R2、R3、Rn全部并联,作为一个合成电阻Rs,由于是几个电阻并列连接而形成的合成电阻,与RX相 比,Rs可示为十分小的数值。下图是等价电路图。
在此电路中,在钳口(CT1)处施加电压(V) ,使与接地电阻相应的电流(I)流动。该电流与测试电阻R(合成电阻:Rx+Rs)成 反比例关系,可使用其它钳口(CT2)检测出的电流,计算后求取此测试电阻R。此时,R作为测量值。不过,相对于RX,RS可视 作非常小的数值而忽略不记,因此,显示值可作为测试的接地电阻值。
使用说明
钳形接地电阻计
目录 1、 安全警告 2、 特点 3、 技术规格 4、 仪表部位名称 5、 测量原理 6、 测量前的准备 7、 测量方法 7-1.普通电流测定 7-2.漏电流测定 7-3.接地电阻测定 8、其它功能 8.1.自动关机功能 8.2.数据保持功能 8.3.蜂鸣功能 8.4.背光功能 8.5.存储功能 9、更换电池
采用传感器集线器提高应用的性能和功耗

采用传感器集线器提高应用的性能和功耗传感器已成为许多系统中的常规功能。
它们与许多其他外围设备一起存在,以增加可以纳入系统正在完成的工作的环境输入范围。
但是,在某些系统中,传感器的数量可能会压倒其他更传统的外围设备,并且可能比其他外围设备更能影响性能。
与智能手机相比,这不是一个问题。
从一个或两个具有专用功能的传感器,移动平台大大增加了传感器的数量,并向那些梦想有新事物的有进取心的开发人员开放了传感器数据。
建筑师在整合传感器时可能从未设想过这些应用。
因此,当直接连接到应用处理器(AP)时,传感器(包括用于屏幕的触摸传感器)变得更加沉重。
借助用于环境光,接近度,加速度,旋转甚至磁场,压力,湿度,辐射和化学传感的传感器,可以有效地从AP卸载传感器的管理。
如果AP需要每一块传感器数据,那么除了用这些数据充斥AP之外别无选择。
然而,传感器,如果他们正在工作,只需报告他们看到的内容。
从最基本的角度来看,它们并不意味着对数据的意义- 这就是处理器的作用。
传感器在过去几年变得更加智能化,但传感器的决策范围仍然有限。
之后,某些处理器必须决定与数据有关的内容(如果有的话)。
虽然AP最终可能会使用相关数据,但只是为了跟踪数据并确定相关内容,这可能是一项相当大的工作。
正如专用电路处理无线电,视频,图形和其他密集功能一样,传感器集线器可以通过屏蔽AP免受可能被忽略的传感器事件来释放处理器带宽。
通过允许AP进入睡眠状态,即使传感器仍处于活动状态,传感器集线器也可以延长电池寿命。
传感器接口传感器具有多种接口,用于与系统的其余部分进行数据通信。
大多数人使用SPI或I²C等外设总线方案来传输数据,但这就是大部分共性的结束。
我们将看几个例子,这些例子可以说明为什么可以保证传感器集线器。
一个例子是来自Kionix的加速度计KXTIK-1004,它展示了基本和更复杂的相互作用。
它碰巧有一个I²C接口,虽然有SPI变种。
LGA-4000用户手册(0613)

正文目录
阅 读 说 明..................................................................................................................................... 3 用户须知.......................................................................................................................................3 概况...............................................................................................................................................3 注意事项.......................................................................................................................................3 危险信息.......................................................................................................................................4 供货和运输......................................................
CertaDrive G3 LED驱动器数据手册说明书

CertaDrive G3CertaDrive 11W 0.25A 42V I 230V9290 033 91880Affordable and reliable LED DriversAffordable LED Driver range offering Philips reliability. The CertaDrive range is compatible with COB and mid-power LEDs from any LED manufacturer.BenefitsFeaturesApplicationSeptember 2021•Design based on Philips experience and knowledge of lighting •Various power wattage drivers for different applications•Independent housing design for stand-alone installations •Affordable LED Drivers with premium brand•High reliability design proved by G1/G2•Great EMI performance suitable for different luminaire•Low ripple current less than 8%•30,000 hours lifetime•Public buildings (airports, cinemas,theaters, exhibition halls)•Retail (supermarkets, shops)•OfficeElectrical input dataSpecification item Value Unit ConditionRated input voltage range220...240V ac Performance rangeRated input voltage230V acRated input frequency range50...60Hz Performance rangeRated input current0.06A@ rated output power @ rated input voltageRated input power13W@ rated output power @ rated input voltagePower factor0.9@ rated output power @ rated input voltageTotal harmonic distortion20%@ rated output power @ rated input voltage Efficiency83%@ratedoutputpower@************************** Input voltage AC range202...254V ac Operational rangeInput frequency AC range47.5...63Hz Operational rangeIsolation input to output SELVElectrical output dataSpecification item Value Unit ConditionRegulation method Constant CurrentOutput voltage30...42V dcOutput voltage max.60V Maximum output voltage (rms)Output current0.25AOutput current tolerance ±8%Output current ripple LF≤ 8%Ripple = peak / average, < 3kHzOutput current ripple HF≤ 15%Output P st LM≤ 0.06In entire operating windowOutput SVM≤ 0.12In entire operating windowOutput power7.5...11WElectrical data controls inputSpecification item Value Unit ConditionControl method FixedWiring and ConnectionsInsulationInsulation per IEC61347-1Input OutputInput SELVOutputSELVSpecification itemValueUnitTypeInput wire cross-section 0.75...1.5 / 18...16mm 2 / AWG solid / stranded wire Input wire strip length 8 (9)mm Output wire cross-section 0.75...1.5 / 18...16mm 2 / AWG solid / stranded wireOutput wire strip length 8...9mm Maximum cable length0.3mTotal length of wiring including LED module, one wayDimensions and weightLogistical dataSpecification itemValueProduct name CertaDrive 11W 0.25A 42V I 230V Logistic code 12NC 9290 033 91880Pieces per box64Operational temperatures and humiditySpecification itemValueUnitConditionAmbient temperature -20...+50ºC Higher ambient temperature allowed as long as Tcase-max is not exceededTcase-max 75ºC Maximum temperature measured at T case -point Tcase-life65ºC Measured at T case -pointMaximum housing temperature 130ºC In case of a failure, inherent by design Relative humidity10 (90)%Non-condensingSpecification itemValueUnitTolerance (mm)Length (A1)101mm Mounting hole distance (A2)90mm Width (B1)41mm Width (B2)30mm Height (C1)28mm Mounting hole diameter (D1) 3.3mm Weight65gram±0.3±0.3±0.3±0.3±0.2±0.1LifetimeSpecification itemValueUnitConditionDriver lifetime30,000hoursMeasured temperature at Tcase-point is Tcase-life. Maximum failures = 10%Storage temperature and humiditySpecification itemValueUnitConditionAmbient temperature -25...+85ºC Relative humidity5 (95)%Non-condensingProgrammable featuresSpecification itemAvailableDefault settingConditionSet Adjustable Output Current (AOC)250 mALED Module Temperature Protection (MTP)No Driver Temperature Limit (DTL)No Constant Light Output (CLO)No Corridor ModeNo DC emergency (DCemDim)NoFeaturesSpecification itemValueConditionOpen load protection Yes Automatic recovering Short circuit protection Yes Automatic recovering Over power protection Yes Automatic recovering Hot wiringNo Suitable for fixtures with protection class II per IEC60598Energy metering (DALI part 252)No DiagnosticsNo50,000hours Measured temperature at Tcase-point is Tcase-life -100C. Maximum failures = 10%NoInrush currentSpecification item Value Unit ConditionInrush current9.91A Input voltage 230VInrush peak width128µs Input voltage 230 V, measured at 50% height Drivers / MCB 16A type B≤ 98pcs Indicative valuePlease refer to the driver design in guide if you use other MCB-types.Driver touch current / protective conductor currentSpecification item Value Unit ConditionTypical Touch Current (ins. Class II)0.7mA peak Acc. IEC61347-1. LED module contribution not includedSurge immunitySpecification item Value Unit ConditionMains surge immunity (diff. mode)1kV Acc. IEC61000-4-5. 2 Ohm, 1.2/50us, 8/20usMains surge immunity (comm. mode)2kV Acc. IEC61000-4-5. 12 Ohm, 1.2/50us, 8/20usApplication InfoSpecification item ValueApproval marks CCC / CE / ENEC / RCM / SELV / TISI / UKCAIngress Protection classification (IP)20Application Indoor PointMounting Type Built-in / IndependentGraphsOperating windowPower factor versus output powerEfficiency versus output powerTHD versus output power©2021 Signify Holding, IBRS 10461, 5600 VB, NL. All rights reserved.UK importer address: Signify Commercial UK Limited, 3, Guildford Business Park, GU2 8XG.The information provided herein is subject to change without notice. Signify does not give any representation or warranty as to the accuracy orcompleteness of the information included herein and shall not be liable for any action in reliance thereon. The information presented in this documentis not intended as any commercial offer and does not form part of any quotation or contract, unless otherwise agreed by Signify.Philips and the Philips Shield Emblem are registered trademarks of Koninklijke Philips N.V. All other trademarks are owned by Signify Holding or theirrespective owners.Date of release: September 17, 2021 v2/oem。
两轮平衡小车说明书
电气电子工程学院自主创新作品两轮平衡小车摘要两轮自平衡小车具有体积小、结构简单、运动灵活的特点,适用于狭小和危险的工作空间,在安防和军事上有广泛的应用前景。
两轮自平衡小车是一种两轮左右平衡布置的,像传统倒立摆一样,本身是一种自然不稳定体,其动力学方程具有多变量、非线性、强耦合、时变、参数不确定性等特性,需要施加强有力的控制手段才能使其保持平衡。
本作品采用STM32单片机作为主控制器,用一个陀螺仪传感器来检测车的状态,通过dvr8800控制小车两个电机,来使小车保持平衡状态,通过2.4G模块无线通讯进行遥控来控制小车运行状态。
关键词:智能小车;单片机;陀螺仪。
目录一.前言 (4)一.两轮平衡车的平衡原理 (4)2.1 平衡车的机械结构..........................................................................错误!未定义书签。
2.2 两轮车倾倒原因的受力分析 (4)2.3 平衡的方法 (5)三.系统方案分析与选择论证 (5)3.1 系统方案设计 (5)3.1.1 主控芯片方案 (5)3.1.2 姿态检测传感器方案 (6)3.1.3 电机选择方案 (6)3.2 系统最终方案 (7)四.主要芯片介绍和系统模块硬件设计 (7)4.1.STM32单片机简介(stm32rbt6) (7)4.2.陀螺仪传感器 (8)4.3.TB6612 (8)4.4.编码器 (9)4.5. 主控电路 (9)4.6 电机驱动电路 (10)五.系统软件设计 (11)5.1 PID概述 (11)5.2 数字PID算法 (12)5.3 PID控制器设计 (13)六.硬件电路 (14)七.制作困难 (15)八.结论 (16)九.参考文献 (16)一.前言应用意义。
自平衡车巧妙地利用地心引力使其自身保持平衡,并使得重力本身成为运动动能的提供者,载重越大,行驶动能也就越大,具有环保的特点(胡春亮等,2007)。
ld中文手册完全版%28带目录%29
ld中文使用手册完全版(译)-1、概述 (4)2、命令行选项 (5)2.1、连接器提供大量的命令行选项 (5)2.2、连接脚本 (5)2.3、对于名称是单个字符的选项 (5)2.4、对于名称是多个字符的选项,选项前可以有一个或两个破折号; (5)2.5、多字符选项的参数 (5)2.5、如果连接器通过,被编译器驱动来间接引用(比如GCC), (6)2.5.1、被GNU连接器接受的常用命令行开关的一个列表 (6)`-aKEYWORD' (6)`-AARCHITECTURE'`--architecture=ARCHITECTURE' (6)`-b INPUT-formAT'`--format=INPUT-formAT' (6)`-cMRI-COMMANDFILE' (6)`-d'`-dc'`-dp' (6)`-e ENTRY'`--entry=ENTRY' (6)`-E'`--export-dynamic' (6)`-EB'连接big-endian对象. 会影响缺省输出格式 (7)`-EL'连接little-endian对象. 会影响缺省输出格式 (7)`-g'忽略. 为了跟其它工具兼容而提供 (7)`-i'执行一个增量连接(跟'-r'等同) (7)`-init NAME' (7)`-lARCHIVE'`--library=ARCHIVE' (7)`-M'`--print-map'打印一个连接位图到标准输出 (7)`-n'`--nmagic', (7)`-N'`--omagic' (7)`--no-omagic' (7)`-o OUTPUT'`--output=OUTPUT' (7)`-O LEVEL' (7)`-q'`--emit-relocs' (7)`-r'`--relocateable' (7)`-R FILENAME'`--just-symbols=FILENAME' (8)`-s'`--strip-all',忽略输出文件中所有的符号信息 (8)`-S'`--strip-debug'忽略输出文件中所有的调试符号信息(但不是所有符号). (8)`-t'`--trace',打印ld处理的所有输入文件的名字 (8)`-T SCRIPTFILE'`--script=SCRIPTFILE' (8)`-u SYMBOL'`--undefined=SYMBOL' (8)`-Ur' (8)`--unique[=SECTION]' (8)`-v'`--version' `-V' (8)`-x'`--discard-all'删除所有的本地符号. (8)`-X'`--discard-locals' (8)`-y SYMBOL'`--trace-symbol=SYMBOL' (8)`-z KEYWORD' (8)`-( ARCHIVES -)'`--start-group ARCHIVES --end-group' (9)`--accept-unknown-input-arch' (9)`-assert KEYWORD'这个选项被忽略,只是用来跟SunOS保持兼容 (9)`-Bdynamic'`-dy'`-call_shared'连接动态链接库 (9)`-Bgroup' (9)'--no-undefined' (9)`-Bstatic'`-dn' `-non_shared' `-static' (9)`-Bsymbolic' (9)`--check-sections'`--no-check-sections' (10)`--cref' (10)`--no-define-common' (10)`--defsym SYMBOL=EXPRESSION' (10)`--demangle[=style]' `--no-demangle' (10)`--dynamic-linker FILE' (10)`--embedded-relocs' (10)`--fatal-warnings'把所有的警告视为错误 (10)`--force-exe-suffix'确保输出文件有一个.exe后缀 (10)`--no-gc-sections'`--gc-sections' (11)`--help'在标准输出上打印一个命令行选项概要,然后退出. (11)`--target-help' (11)`-Map MAPFILE' (11)`--no-keep-memory' (11)`--no-undefined'`-z defs' (11)`--allow-multiple-definition'`-z muldefs' (11)`--allow-shlib-undefined' `--no-allow-shlib-undefined' (11)`--no-undefined-version' (11)`--no-warn-mismatch' (11)`--no-whole-archive' (11)`--noinhibit-exec' (11)`-nostdlib' (12)`--oformat OUTPUT-formAT' (12)`-qmagic'这个选项被忽略,只是为了跟Linux保持兼容 (12)`-Qy'这个选项被忽略,只是为了跟SVR4保持兼容. (12)`--relax' (12)`--retain-symbols-file FILENAME' (12)'--retain-symbols-file' (12)`-rpath DIR' (12)`-rpath-link DIR' (12)`-shared'`-Bshareable' (13)`--sort-common' (13)`--split-by-file [SIZE]' (13)`--split-by-reloc [COUNT]' (13)`--traditional-format' (13)'--trafitinal-format'开关告诉ld 不要把相同的入口合并起来 (13)`--section-start SECTIONNAME=ORG' (13)`-Tbss ORG'`-Tdata ORG' `-Ttext ORG' (14)`--dll-verbose'`--verbose' (14)`--version-script=VERSION-SCRIPTFILE' (14)`--warn-common' (14)`--warn-constructors' (14)`--warn-multiple-gp' (15)`--warn-once' (15)`--warn-section-align' (15)`--whole-archive' (15)`--wrap SYMBOL' (15)`--enable-new-dtags'`--disable-new-dtags' (15)i386 PE平台的特定选项 (15)`--add-stdcall-alias' (16)`--base-file FILE' (16)`--enable-stdcall-fixup'`--disable-stdcall-fixup' (16)`--export-all-symbols' (16)3、环境变量 (16)`GNUTARGET' (16)`LDEMULATION' (16)4、连接脚本 (17)4.1、基本的连接脚本的概念 (17)4.1.1、三种节 (17)4.1.2、每一个loadable或allocatable的输出节有两个地址 (17)4.1.3、每一个目标文件还有一个关于符号的列表, 被称为'符号表' (17)4.2、连接脚本的格式 (18)4.3、简单的连接脚本示例 (18)4.4、简单的连接脚本命令 (19)4.4.1、设置入口点. (19)4.4.2、处理文件的命令. (19)`INCLUDE FILENAME' (19)`INPUT(FILE, FILE, ...)'`INPUT(FILE FILE ...)' (19)`GROUP(FILE, FILE, ...)'`GROUP(FILE FILE ...)' (19)`OUTPUT(FILENAME)' (19)`SEARCH_DIR(PATH)' (19)`STARTUP(FILENAME)' (20)4.5、处理目标文件格式的命令 (20)`OUTPUT_formAT(BFDNAME)'`OUTPUT_formAT(DEFAULT, BIG, LITTLE)' (20)`TARGET(BFDNAME)' (20)4.6、其它的连接脚本命令 (20)`EXTERN(SYMBOL SYMBOL ...)'. (20)`FORCE_COMMON_ALLOCATION' (20)`INHIBIT_COMMON_ALLOCATION' (20)`NOC ROSSREFS(SEC TION SEC TION ...)' . (20)`OUTPUT_ARC H(BFDARCH)' (21)4.6、为符号赋值 (21)4.7、SEC TIONS命令 (22)4.7.1、输出节描述 (22)4.7.2、输出节名 (23)4.7.3、输出节描述 (23)4.7.4、输入节描述 (23)4.7.4.1、输入节通配符 (24)4.7.4.2、输入节中的普通符号. (25)4.7.4.3、输入节和垃圾收集 (25)4.7.5、输出节数据 (26)4.7.5.1、输出节关键字 (27)4.7.5.2、输出节的丢弃。
摄像头组-燕山大学-燕鸣技术报告
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:燕山大学队伍名称:燕鸣参赛队员:丁兆环王争张暖带队老师:宋俊杰呼忠权关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车邀请赛有关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第一章引言 (4)1.1“飞思卡尔杯”智能车比赛介绍 (4)1.2第九届比赛规则介绍 (5)第二章智能车整体设计 (6)2.1车模改装 (8)2.2传感器安装 (10)2.3电池的安放 (12)第三章传感器选择和布局 (14)第四章硬件电路模块设计 (19)4.1MCF52259控制器模块 (19)4.2加速度计陀螺仪模块 (21)4.3电源控制模块 (22)4.4测速反馈模块 (25)4.5电机驱动模块 (25)4.6液晶显示与串口、键盘模块、拨码开关 (27)第五章软件部分设计 (29)5.1软件功能与框架 (29)5.2主要算法及其实现 (33)5.3图像处理与路径优化 (41)第六章开发与调试 (44)6.1开发环境 (44)6.2程序下载 (45)6.3调试 (47)第七章总结 (48)参考文献 (49)附录A图像校正matlab程序 (50)3第一章引言这份技术报告中,通过对小车整体设计思路、电路设计、算法策略及调试参数的介绍,详尽地阐述了我们的想法,具体表现在机械、电路的独特设计,以及算法方面的创新想法,而对车模具体参数的调试我们也付出了很大的精力。
这份报告凝聚着大家的心血和智慧,在此要感谢学校的大力支持及老师的悉心教导,特别感谢和我们一起协作的队员们,协助,互促,共勉使我们走到了今天。
1.1“飞思卡尔杯”智能车比赛介绍本文以第九届“飞思卡尔”杯全国大学生智能汽车竞赛为背景,该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一,为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革。
RD4000中文手册

三轴数字陀螺仪篇

还是刚才的那个行人,可是这回的情况不同了,这次他最后摔倒了。这个行人,他起初是在正常行走,一不留神,脚踩到一个西瓜皮,这个人挣扎了几下却无济于事,结果就摔到了。这种现象归类为自动跳位系统现象,如下面的流程图3-2所示。
图3-2 自纠正跳位系统图
当稳定的系统受到外界干扰的时候,系统就面临着失稳的风险。如果系统的自纠正能力在某一方面不是很强,那么它就会被另外的稳定态所代替。在这个例子里,正常行走的行人就是稳定态(A)。突然踩到一个西瓜皮代表一个很强的外界干扰因素随机性地进入系统,行人马上会四肢翻腾,这个翻腾的过程就是过度态。行人在拼命保持自己的重心,但是最后他还是摔倒了。摔倒后,坐在了地上就是稳定态(B)。我们把踩到西瓜皮的瞬间归类为跳出段,把四肢翻腾但是仍然倒下的过程归类为跳位段。
机器人衡态调整
三轴数字陀螺仪篇
北京森汉科技有限公司
一.硬件介绍
1
如下图1-1所示,三轴数字陀螺仪L3G4200D芯片X、Y、Z三轴互相正交分布。
图1-1 坐标方向及背面图
图1-1中明确标出了L3G4200D芯片X、Y、Z轴的坐标方向及背面图。本陀螺仪芯片可供用户选择其尺度量程,量程范围从 ±250 dps ~ ±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
图3-3 陀螺仪应用系统图
1
在机器人行走过程中,当处在双腿着地某一姿态时,循环启动陀螺仪周期性地采集三轴数字陀螺仪的三轴数字值,紧接着存储在数组L3G4200D_dis_data[3]变量当中,并比较数组L3G4200D_dis_data[3]与对应设定角速度幅限值,依据是否超幅限值改变相应从0到11号舵机的值,调整机器人姿势使其保持当前姿态稳定。当机器人保持在其当前姿态时,就退出循环,继续行走,同样也依旧进入下一个姿态当中去。若在某一姿态的平衡状态被迫改变,就会同样进入循环当中,及时修正机器人的姿势。本调整程序工作逻辑方式是,快速反馈,快速回程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2
焊接信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4
数字主要块. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.1 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
L3G4200D
MEMS运动传感器: 三轴数字输出陀螺仪
特点
■ 三种可选全尺度
(±250/500/2000 dps)
■ I2 C / SPI数字输出接口 ■ 16比特率值的数据输出 ■ 两个数字输出线(中断和
LGA-16 (4x4x1 mm)
dataready)
■ 集成低和高通滤波器的用户
可选带宽
■ Embedded自检 ■ 宽电源电压,2.4 V到3.6 V ■ 低压兼容IOs, 1.8 V ■ 嵌入省电和睡眠模式 ■ 高冲击生存能力 ■ 扩展的工作温度范围
1.1 管脚描述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2
机械和电气规范. . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 2.2 2.3 机械特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 电气特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 通讯接口特性. . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
(-40 °C到+85 °C)
■ ECOPACK ® RoHS和“绿色”标准
(见 第6)
应用
■ 游戏和虚拟现实的输入设备 ■ 运动控制与MMI(人机
接口)
■ GPS导航系统 ■ 机械及机器人
表1.
设备摘要
订货代码 L3G4200D L3G4200DTR 温度范围(°C) -40到+ 85 包装 包装 托盘 LGA-16 (4x4x1) 编带和卷轴
3.1 术语. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1 3.1.2 3.1.3 灵敏度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 零利率水平. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 自检. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
表格清单
表格清单
表1. 表2. 表3. 表4. 表5. 表6. 表7. 表8. 表9. 表10. 表11. 表12. 表13. 表14. 表15. 表16. 设备摘要. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 管脚描述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 过滤值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 机械特性@ Vdd = 3.0 V, T = 25 °C除非另有说明. . . . . . . . . . . . . . . . . . . . . . . . 8 电气特性@ Vdd =3.0 V, T=25 °C除非另有说明. . . . . . . . . . . . . . . . . . . . . . . . . .9 SPI 从属时间值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10 I2C 从属时间值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 绝对最大额定值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 串行接口引脚说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 I2C术语. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 SAD+Read /写模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16 转让时法师是记录一个字节从属 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 转让时法师是记录多个字节从属 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 转让时法师是接收(阅读)由从属 .一个字节的数据. . . . . . . . . . . . . . . . . . . . . . . .17 转让时法师是接收(阅读)多个数据字节从从属 . . . . . . . . . . . . . . . . . . . . . . . . . 17 文档修订历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
6 7
包装信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21 修订历史. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
2/24
L3G4200D
二月2by LoaDing
内容
L3G4200D
内容
1 框图和引脚说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
5.2
SPI 总线接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
5.2.1 5.2.2 5.2.3 SPI阅读. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 SPI写. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 SPI阅读3-wires模式. . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 2.3.2 SPI -串行外设接口. . . . . . . . . . . . . . . . . . . . . . . . . . 10 I2C -间IC控制接口. . . . . . . . . . . . . . . . . . . . . . . . . . 11
3
绝对最大额定值 . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
说明
该L3G4200D是一种低功耗三轴 陀螺仪提供三个不同的用户 可选(±250/±500/±2000 dps).充分秤 它包括一个传感元件和一个IC接口 能够提供角速度的检测 外部世界,通过一个数字接口 (I 2 C / SPI). 传感元件是采用 专门微细加工工艺,而 IC接口技术实现了用CMOS 允许设计一个专门的电路,是 修整,以更好地匹配传感元件 特点. 该L3G4200D可在一个塑料栅格 阵列(LGA) 包装并提供了极好 温度稳定性和高分解超过一 工作温度范围扩大到(-40 °C +85 °C).
5
数字接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1 I2C串行接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
5.1.1 I2C操作. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
3/24
图目录
L3G4200D
图目录
图1. 图2. 图3. 图4. 图5. 图6. 图7. 图8. 图9. 图10. 图11. 图12. 图13. 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5 引脚连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5 L3G4200D外部低通滤波器值 SPI 从属 时序图(2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 I2C 从属时序图(3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 框图. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 读取和写入协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18 SPI阅读协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 读取多个字节SPI协议(2字节的例子). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 SPI写协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 多个字节SPI字节写入协议(2例子). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 SPI阅读3-wires模式协议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 LGA-16:机械数据和包装尺寸. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22