上海交大材基第五章塑性变形与回复再结晶习题集讲解.
上海交通大学材料科学基础习题与重点

第一章原子结构与键合1-1. 原子中一个电子的空间位置和能量可用哪4个量子数来决定?1-2. 在多电子的原子中,核外电子的排布应遵循哪些原则?1-3. 在元素周期表中,同一周期或同一主族元素原子结构有什么共同特点?从左到右或从上到下元素结构有什么区别?性质如何递变?1-4. 何谓同位素?为什么元素的相对原子质量不总为正整数?1-5. 铬的原子序数为24,它共有四种同位素:w(Cr)=4.31%的Cr原子含有26个中子,w(Cr)=83.76%的Cr含有28个中子,w(Cr)=9.55%的Cr含有29个中子,且w(Cr)=2.38%的Cr含有30个中子。
试求铬的相对原子质量。
1-6. 铜的原子序数为29,相对原子质量为63.54,它共有两种同位素Cu63和Cu65,试求两种铜的同位素之含量百分比。
1-7. 锡的原子序数为50,除了4f亚层之外,其它内部电子亚层均已填满。
试从原子结构角度来确定锡的价电子数。
1-8. 铂的原子序数为78,它在5d亚层中只有9个电子,并且在5f层中没有电子,请问在Pt的6s亚层中有几个电子?1-9. 已知某元素原子序数为32,根据原子的电子结构知识,试指出它属于哪个周期?哪个族?并判断其金属性强弱。
1-10. 原子间的结合键共有几种?各自特点如何?1-11.图1-1绘出三类材料—金属、离子晶体和高分子材料之能量与距离关系曲线,试指出它们各代表何种材料。
图1-11-12.已知Si的相对原子质量为28.09,若100g的Si中有5×1010个电子能自由运动,试计算:(a)能自由运动的电子占价电子总数的比例为多少?(b)必须破坏的共价键之比例为多少?1-13. S的化学行为有时象6价的元素,而有时却象4价元素。
试解释S这种行为的原因。
1-14. A和B元素之间键合中离子特性所占的百分比可近似的用下式表示:这里x A和x B分别为A和B元素的电负性值。
已知Ti、O、In和Sb 的电负性分别为1.5,3.5,1.7和1.9,试计算TiO2和InSb的IC%。
第五章塑性变形与回复再结晶--习题集
psi是一种压力单位,定义为英镑/平方英寸,145psi=1MpaPSI英文全称为Pounds per square inch。
P是磅pound,S是平方square,I 是英寸inch。
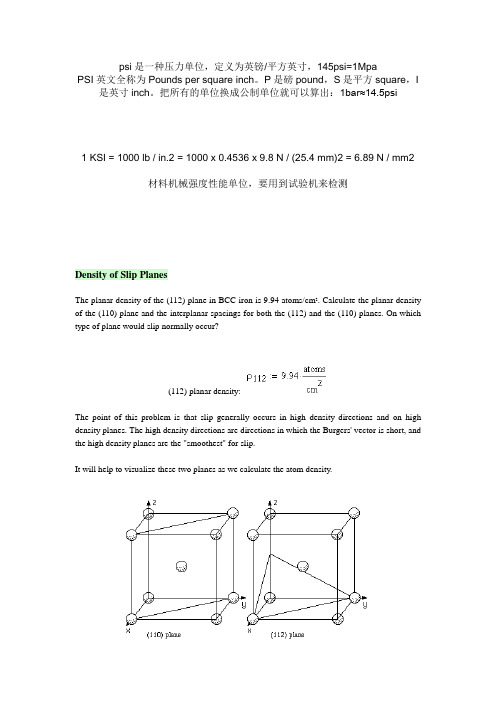
把所有的单位换成公制单位就可以算出:1bar≈14.5psi1 KSI = 1000 lb / in.2 = 1000 x 0.4536 x 9.8 N / (25.4 mm)2 = 6.89 N / mm2材料机械强度性能单位,要用到试验机来检测Density of Slip PlanesThe planar density of the (112) plane in BCC iron is 9.94 atoms/cm2. Calculate the planar density of the (110) plane and the interplanar spacings for both the (112) and the (110) planes. On which type of plane would slip normally occur?(112) planar density:The point of this problem is that slip generally occurs in high density directions and on high density planes. The high density directions are directions in which the Burgers' vector is short, and the high density planes are the "smoothest" for slip.It will help to visualize these two planes as we calculate the atom density.The (110) plane passes through the atom on the lattice point in the center of the unit cell. The plane is rectangular, with a height equal to the lattice parameter a0and a width equal to the diagonal of the cube face, which is 2 a0.Lattice parameter (height):Width:Thus, according to the geometry, the area of a (110) plane would beThere are two atoms in this area. We can determine that by counting the piece of atoms that lie within the circle (1 for the atom in the middle and 4 times 1/4 for the corners), or using atom coordinates as discussed in Chapter 3. Then the planar density isThe interplanar spacing for the (110) planes isFor the (112) plane, the planar density is not quite so easy to determine. Let us draw a larger array of four unit cells, showing the plane and the atoms it passes through.This plane is also rectangular, with a base width of √2 a0 (the diagonal of a cube face), and a height of √3 a0 (the body diagonal of a cube). It has four atoms at corners, which are counted as 1/4 for the portion inside the rectangle (4 x 1/4) and two atoms on the edges, counted as 1/2 for the portion inside the rectangle (2 x 1/2). This is a total of 2 atoms.Base width:Height:Hence, we can calculate the area and density as for the (110) plane.The planar density and interplanar spacing of the (110) plane are larger than that of the (112) plane, thus the (110) plane would be the preferred slip plane1.有一根长为5 m,直径为3mm的铝线,已知铝的弹性模量为70GPa,求在200N的拉力作用下,此线的总长度。
上海交通大学 材料科学基础pptch5-1
3、弹性滞后 由于应变落后于应力,在应力-应变 曲线上使得加载线与卸载线不重合而形 成一封闭回线,称为弹性滞后。
5.1.4粘弹性 5.1.4粘弹性
粘性流动: 粘性流动:是指非晶态固体和液体在很小的外 力作用下,就会发生没有确定形状的流变, 力作用下,就会发生没有确定形状的流变,而 且在外力去除后,形变不能回复。 且在外力去除后,形变不能回复。 牛顿粘性流动定律: σ=η·dε/dt 牛顿粘性流动定律: σ=η dε/dt 粘弹性具有弹性和粘性变形两方面的特征, 粘弹性具有弹性和粘性变形两方面的特征,它 是高分子材料的重要力学性能之一。 是高分子材料的重要力学性能之一。其特点是 应变落后于应力。 应变落后于应力。其σ—ε曲线为一回线,回 ε曲线为一回线, 线所包含面积即为内耗。 线所包含面积即为内耗。 粘弹性模型: 粘弹性模型: Maxwell模型 应力松弛( 模型—应力松弛 relaxation) Maxwell模型 应力松弛(stress relaxation) Voigt模型 蠕变回复、弹性后效、 模型—蠕变回复 Voigt模型 蠕变回复、弹性后效、弹性记忆
5.1 弹性和黏弹性
5.1.1弹性变形的本质 5.1.1弹性变形的本质
弹性变形: 弹性变形:是指外力去除后能够完全回复 的那部分变形, 的那部分变形,可以从原子间结合力的角 度来了解它的物理本质。如下图所示。 度来了解它的物理本质。如下图所示。
5.1.2弹性变形的特征和弹性模量 弹性变形的特征 (1) 理想的弹性变形是可逆变形 在弹性变形范围内, (2) 在弹性变形范围内,应力和应变间服从虎 克定律。 克定律。 σ= Eε τ= Gγ /[2 G = E /[2(1-ν)] /[3 K = E /[3(1-2ν)] 式中τ 分别为切应力、 式中 τ 、 γ—分别为切应力 、 切应变 , K—体弹 分别为切应力 切应变, 体弹 性模量、 性模量、v—泊松比 泊松比
第五章 金属的塑性变形及再结晶
四、金属的热加工
1.热变形加工与冷变形加工的区别
从金属学的观点来看,热加工和冷加工的区别是以再结晶温 度为界限。在再结晶温度之下进行的变形加工,在变形的同时没 有发生再结晶,这种变形加工称之为冷变形加工。而金属在再结 晶温度以上进行塑性变形就称为热加工。
2.热变形加工对金属组织与性能的影响
(1)改善铸态组织 热变形加工可以使金属铸锭中的组织缺陷显 著减少,如气孔、显微裂纹等,从而提高材料的致密度,使金属 的力学性能得到提高。
在工业上常利用回复现象将冷变形金属低温加热既消除应为去应力退火力稳定组织同时又保留了加工硬化性能这种热处理方法称1再结晶过程变形后的金属在较高温度加热时原子活动能力较强时会在变形随着原子的扩散移动新晶核的边界面不断向变形的原晶粒中推进使新晶核不断消耗原晶粒而长大
金属材料及热处理
第五章 金属的塑性变形及再结晶
二、冷塑性变形对金属组织和性能的影响
2.冷塑性变形对组织结构的影响 1)产生“纤维组织”
塑性变形使金属的晶粒形状发生了变化,即随着金属外形的 压扁或拉长。当变形量较大时,各晶粒将被拉长成细条状或纤维 状,晶界变得模糊不清,形成所谓的“纤维组织”。
2)产生变形织构
由于在滑移过程中晶体的转动和旋转,当塑性变形量很大时, 各晶粒某一位向,大体上趋于一致了,这种现象称择优取向。 这种由于塑性变形引起的各个晶粒的晶格位向趋于一致的晶粒 结构称为变形织构。
二、冷塑性变形对金属组织和性能的影响
3.产生残余内应力
经过塑性变形,外力对金属所做的功,约90%以上在使金属变 形的过程中变成了热,使金属的温度升高,随后散掉;部分功转 化为内应力残留于金属中,使金属的内能增加。残余的内应力就 是指平衡于金属内部的应力,它主要是金属在外力的作用下所产 生的内部变形不均匀而引起的。 第一类内应力,又称宏观内应力。它是由于金属材料各部分变形 不均匀而造成的宏观范围内的残余应力。 第二类内应力,又称微观残余应力。它是平衡于晶粒之间的内应 力或亚晶粒之间的内应力。 第三类内应力,又称晶格畸变内应力。其作用范围很小,只是在 晶界、滑移面等附近不多的原子群范围内维持平衡。
上海交大材基-第五章塑性变形与回复再结晶--复习提纲.
第5章材料的形变和再结晶提纲5.1 弹性和粘弹性5.2 晶体的塑性变形(重点)5.3 回复和再结晶(重点)5.4 高聚物的塑性变形学习要求掌握材料的变形机制及特征,以及变形对材料组织结构、性能的影响;冷、热加工变形材料的回复和结晶过程。
1.材料的弹性变形本质、弹性的不完整性及黏弹性;2.单晶体塑性变形方式、特点及机制(滑移、孪生、扭折)3.多晶体、合金塑性变形的特点及其影响因素4.塑性变形对材料组织与性能的影响;5.材料塑性变形的回复、再结晶和晶粒长大过程;6.影响回复、再结晶和晶粒长大的诸多因素(包括变形程度、第二相粒子、工艺参数等)7、结晶动力学的形式理论(J-M-A方程)8、热加工变形下动态回复、再结晶的微观组织特点、对性能影响。
9、陶瓷、高聚物材料的变形特点重点内容1. 弹性变形的特征,虎克定律(公式),弹性模量和切变弹性模量;材料在外力作用下发生变形。
当外力较小时,产生弹性变形。
弹性变形是可逆变形,卸载时,变形消失并恢复原状。
在弹性变形范围内,其应力与应变之间保持线性函数关系,即服从虎克(Hooke)定律:式中E为正弹性模量,G为切变模量。
它们之间存在如下关系:弹性模量是表征晶体中原子间结合力强弱的物理量,故是组织结构不敏感参数。
在工程上,弹性模量则是材料刚度的度量。
2. 弹性的不完整性和粘弹性;理想的弹性体是不存在的,多数工程材料弹性变形时,可能出现加载线与卸载线不重合、应变滞后于应力变化等弹性不完整性。
弹性不完整性现象包括包申格效应、弹性后效、弹性滞后和循环韧性等。
3. 滑移系,施密特法则(公式),滑移的临界分切应力;晶体中一个滑移面和该面上一个滑移方向组成。
fcc和bcc,bcc的滑移系?滑移系多少与塑性之间的关系。
滑移的临界分切应力:如何判断晶体中各个滑移系能不能开动?解释几何软化和几何硬化?为何多晶体塑性变形时要求至少有5个独立的滑移系进行滑移?4. 滑移的位错机制,派-纳力(公式);为什么晶体中滑移系为原子密度最大的面和方向?5. 比较塑性变形两种基本形式:滑移与孪生的异同特点;6. 多晶体塑性变形的特点:晶粒取向的影响,晶界的影响;会判断多个晶体中哪些晶体会优先发生塑性变形?7. 细晶强化与Hall-Petch 公式, 高温晶界弱化的原因;晶粒细化为何能同时提高材料的强韧性?位错塞积群效应(应力集中区的应力数值等于外加切应力n 倍)可启动临近晶粒滑移,故高温合金为何要采用定向凝固技术获得单晶?晶界滑动机制和扩散性蠕变8. 固溶强化,屈服现象(吕德斯带),上下屈服点的柯垂耳理论和一般位错增殖理论,应变时效;d c dcττ= 金属有四大著名的强化机制,请给出这几种机制的名称,物理实质,定量描述其强化效果的数学公式。
上海交大材基-第五章塑性变形与回复再结晶--复习提纲

第5章材料的形变和再结晶提纲5.1 弹性和粘弹性5.2 晶体的塑性变形(重点)5.3 回复和再结晶(重点)5.4 高聚物的塑性变形学习要求掌握材料的变形机制及特征,以及变形对材料组织结构、性能的影响;冷、热加工变形材料的回复和结晶过程。
1.材料的弹性变形本质、弹性的不完整性及黏弹性;2.单晶体塑性变形方式、特点及机制(滑移、孪生、扭折)3.多晶体、合金塑性变形的特点及其影响因素4.塑性变形对材料组织与性能的影响;5.材料塑性变形的回复、再结晶和晶粒长大过程;6.影响回复、再结晶和晶粒长大的诸多因素(包括变形程度、第二相粒子、工艺参数等)7、结晶动力学的形式理论(J-M-A方程)8、热加工变形下动态回复、再结晶的微观组织特点、对性能影响。
9重点内容1. 弹性变形的特征,虎克定律(公式),弹性模量和切变弹性模量;材料在外力作用下发生变形。
当外力较小时,产生弹性变形。
弹性变形是可逆变形,卸载时,变形消失并恢复原状。
在弹性变形范围内,其应力与应变之间保持线性函数关系,即服从虎克(Hooke)定律:式中E为正弹性模量,G为切变模量。
它们之间存在如下关系:弹性模量是表征晶体中原子间结合力强弱的物理量,故是组织结构不敏感参数。
在工程上,弹性模量则是材料刚度的度量。
2. 弹性的不完整性和粘弹性;理想的弹性体是不存在的,多数工程材料弹性变形时,可能出现加载线与卸载线不重合、应变滞后于应力变化等弹性不完整性。
弹性不完整性现象包括包申格效应、弹性后效、弹性滞后和循环韧性等。
3. 滑移系,施密特法则(公式),滑移的临界分切应力;晶体中一个滑移面和该面上一个滑移方向组成。
fcc和bcc,bcc的滑移系?滑移系多少与塑性之间的关系。
滑移的临界分切应力:如何判断晶体中各个滑移系能不能开动?解释几何软化和几何硬化?为何多晶体塑性变形时要求至少有5个独立的滑移系进行滑移?4. 滑移的位错机制,派-纳力(公式);为什么晶体中滑移系为原子密度最大的面和方向?5. 比较塑性变形两种基本形式:滑移与孪生的异同特点;6. 多晶体塑性变形的特点:晶粒取向的影响,晶界的影响; 会判断多个晶体中哪些晶体会优先发生塑性变形?7. 细晶强化与Hall-Petch 公式, 高温晶界弱化的原因;晶粒细化为何能同时提高材料的强韧性?位错塞积群效应(应力集中区的应力数值等于外加切应力n可启动临近晶粒滑移,故 高温合金为何要采用定向凝固技术获得单晶?晶界滑动机制和扩散性蠕变 8. 固溶强化,屈服现象(吕德斯带),上下屈服点的柯垂耳理论和一般位错增殖理论,应变时效;d c dcττ= 金属有四大著名的强化机制,请给出这几种机制的名称,物理实质,定量描述其强化效果的数学公式。
6、第5章 5.3 回复和再结晶
一些金属的再结晶温度
影响再结晶的因素
1. 变形程度:变形度增大、开始 TR 下降,等温退火再 结晶速度越快,而大到一定程度,TR趋于稳定。 2.原始晶粒尺寸:其它条件相同时,金属原始晶粒细 小,则变形抗力大,形变储存能高,则TR越低,同 时形核率和长大速度均增加,有利于再结晶。 3. 微量溶质原子:其作用一方面以固溶状态存在于金 属中,会产生固溶强化作用,有利于再结晶;另 一方面溶质原子偏聚于位错和晶界处,起阻碍作 用。总体上起阻碍作用,使TR提高。
(二) 再结晶动力学 再结晶动力学:取决于形核率 N和长大速率 G的大小。 纵坐标表示已再结晶晶粒分数,横坐标表示保温时 间。 结晶动力学曲线表示T—φR—t关系曲线,其特 点: (1) 恒温动力学曲线呈“S”形 (2) 有一孕育期 (3)等温下,再结晶速度呈现“慢、快、慢”的特 点
等温再结晶动力学曲线可用阿弗拉密Avrami方程描述:
x0 ln c0te Q RT x
在不同温度下如以回复到相同程度作比较,即上 式左边为常数,这样对两边同时取对数:
ln t A Q RT
于是,通过作图所得到的直线关系,由其斜率即可求 出回复过程的激活能Q。 铁的回复实验表明,短时间回复时,其激活能与空位 迁移澈活能相近,长时间回复时,其激活能与铁的自扩散 激活能相近。因此对于冷变形金属的回复不能用单一机制 描述。
(一) 再结晶过程
再结晶过程是形核和长大,但无晶格类型变化。 1. 形核 实验表明,再结晶通常在变形金属中能量较高的 局部区域优先形成无畸变的再结晶晶核,其形核机制 有: (1) 晶界弓出形核(凸出形核机制) 对于变形度较小(<20%)的金属,再结晶核多以 这种方式。其形核过程如下图所示:
材料科学基础A习题答案第5章[1]解析
![材料科学基础A习题答案第5章[1]解析](https://img.taocdn.com/s3/m/5ef3bfa0d0d233d4b14e698a.png)
材料科学基础A习题第五章材料的变形与再结晶1、某金属轴类零件在使用过程中发生了过量的弹性变形,为减小该零件的弹性变形,拟采取以下措施:(1)增加该零件的轴径。
(2)通过热处理提高其屈服强度。
(3)用弹性模量更大的金属制作该零件。
问哪一种措施可解决该问题,为什么?答:增加该零件的轴径,或用弹性模量更大的金属制作该零件。
产生过量的弹性变形是因为该金属轴的刚度太低,增加该零件的轴径可减小其承受的应力,故可减小其弹性变形;用弹性模量更大的金属制作该零件可增加其抵抗弹性变形的能力,也可减小其弹性变形。
2、有铜、铝、铁三种金属,现无法通过实验或查阅资料直接获知他们的弹性模量,但关于这几种金属的其他各种数据可以查阅到。
请通过查阅这几种金属的其他数据确定铜、铝、铁三种金属弹性模量大小的顺序(从大到小排列),并说明其理由。
答:金属的弹性模量主要取决于其原子间作用力,而熔点高低反映了原子间作用力的大小,因而可通过查阅这些金属的熔点高低来间接确定其弹性模量的大小。
据熔点高低顺序,此几种金属的弹性模量从大到小依次为铁、铜、铝。
3、下图为两种合金A、B各自的交变加载-卸载应力应变曲线(分别为实线和虚线),试问那一种合金作为减振材料更为合适,为什么?答:B合金作为减振材料更为合适。
因为其应变滞后于应力的变化更为明显,交变加载-卸载应力应变回线包含的面积更大,即其对振动能的衰减更大。
4、对比晶体发生塑性变形时可以发生交滑移和不可以发生交滑移,哪一种情形下更易塑性变形,为什么?答:发生交滑移时更易塑性变形。
因为发生交滑移可使位错绕过障碍继续滑移,故更易塑性变形。
5、当一种单晶体分别以单滑移和多系滑移发生塑性变形时,其应力应变曲线如下图,问A、B中哪一条曲线为多系滑移变形曲线,为什么?应力滑移可导致不同滑移面上的位错相遇,通过位错反应形成不动位错,或产生交割形成阻碍位错运动的割阶,从而阻碍位错滑移,因此其应力-应变曲线的加工硬化率较单滑移高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 单晶体的塑性变形
铜单晶(a=0.36nm )在[112]方向加拉伸应力,拉伸应力为2.5×105Pa ,此条件下:(1)取向因子最大的滑移系有哪几个?(2)计算其分切应力多大?
解:(1) Cu 为F.C.C 结构,易滑移面为{1,1,1},滑移方向为〈1,1,0〉,可以分别求
出[112]方向与这些滑移系之间的两个夹角,然后得到12个取向因子的值。
(这里省略了)
通过上述计算得到具体的滑移系(1,-1,1)[0,1,1]和(-1,1,1)
[1,0,1]为具有最大取向因子滑移系。
(2) 根据施密特法则(公式略),
F=δcosAcosB=1.02*105 Pa
何谓临界分切应力定律?哪些因素影响临界分切应力大小? 解:(略)
沿密排六方单晶的[0001]方向分别加拉伸力和压缩力,说明在这两种情况下,形变的可能方式。
解:1)滑移:a -拉伸的时,当c/a>=1.633,不会产生滑移,当c/a<1.633有可能产
生滑移,可产生滑移的是{1,1,-2,2}<1,1,-2,-3>;其他滑移面不能产生滑移;
b -压缩的时候结果和拉伸一样;
2)孪生:拉伸和压缩的时候都可能产生孪生变形;
3)扭折:拉伸的时候一般不易扭折变形,压缩的时候可以产生扭折变形。
试指出单晶体的Cu 与α-Fe 中易滑移面的晶面与晶向,并分别求它们的滑移面间距,滑移方向上的原子间距及点阵阻力,已知泊松比为ν=0.3,G Cu =48300MPa ,
G α-Fe =81600MPa. 解:体心Fe 具有多种类的滑移系,但是滑移方向均相同。
力=90.56MPa 。
铝单晶体拉伸时,其力轴为[001],一个滑移系的临界分切应力为0.79MN/m2,取向因子COS φCOSλ=0.41,试问有几个滑移系可同时产生滑移?开动其中一个滑移系至少要施加多大的拉应力?
解:Al为F.C.C结构,其滑移系共有{1,1,1}4<1,1,0>3=12个。
可以求得【001】与这些滑移系的取向因子。
(可以列表列出来如下)
其它有4个滑移系,它们的滑移方向的第三个数字为0,因为取向因子为0,根据施密特法则,不能产生滑移。
开动其中一个滑移系需要施加的拉应力,可以根据施密特法则求得:
F=0.79/0.41=1.93 MN/m2
2 多晶体和合金的塑性变形
退火纯Fe,其晶粒尺寸d=1/4mm时,其屈服点σs=100MNm-2;d=1/64mm时σs=250MNm-2。
d=1/16mm时,根据霍尔-----配奇公式求其σs为多少?
解:(略)
画出fcc单晶体金属的τ-ε曲线示意图,它将单晶体塑性变形分为几个阶段?并用位错理论进行解释。
解:(略)
单相合金的冷塑性变形与纯金属的室温塑性变形相比,有何特点。
(纯:滑移系,扭转,位错运动,临界切应力。
单相:还出现固溶强化,应变时效,屈服。
)解:单相合金除了有纯金属的基本特别之外还有固溶强化,应变时效,屈服现象.具体书上有详细解释。
试结合金属单晶体、多晶体、单相合金及复相合金,总结塑性变形过程中的强化机制。
解:1,加工硬化;2,固溶强化;3,细晶强化;4,弥散强化四种强化方式,书上有详细的介绍。
试解释典型的面心立方单晶体的加工硬化曲线,并比较与多晶体加工硬化曲线的差别。
解:(略)
图中所示低碳钢的三条拉伸曲线,(1)初始塑性变形,(2)去载后立即再行加载,(3)去载后时效后再加载。
试回答下列三个问题:
1 解释图示三曲线的屈服现象及(2),(3)中屈服点
上升的原因。
2 屈服现象对提高金属强度有何实际意义。
3 屈服现象对冲压制件表面质量有何不利影响。
解:(供参考)
(1)由于溶质原子的存在,形成Contrell气团,抵消了位错应力,使位错能量降低不易运动,即钉扎效应,若使位错开启须加大力度,形成上屈服点,而一旦挣脱后,运动又变得更容易,出现下屈服点;(2)中位错挣脱了钉扎效应,故无屈服点;卸载后放置较长时间,由于时效效应又可以形成气团,这样(3)中又出现了屈服现象.
(2)提高了材料的强度,超越上屈服点,出现加工硬化,提高了强度。
(3)屈服改变晶粒取向,滑移系形变方向转动,出现形变织构,造成各向异性,这样工件表面凹凸不平。
第3:回复再结晶
1. 假定将再结晶温度定义为退火1小时内完成转变量达95%的温度,已知获得95%转变量
所需要的时间t0.95:
式中
、G分别为在结晶的形核率和长大线速度:
,
a)根据上述方程导出再结晶温度T R与G0、N0、Q g及Q n的函数关系;
b)说明下列因素是怎样影响G0、N0、Q g及Q n 的:1)预变形度;2)原始晶粒度;3)金属纯度。
c)说明上述三因素是怎样影响再结晶温度的。
又据题意,t0.95=1 h,T=T R,代入(1. 1)式,得到:
从而:
2.工业纯铝在室温下经大变形量轧制成带材后,测得室温力学性能为冷加工态的性能。
查
表得知工业纯铝的T再=150℃,但若将上述工业纯铝薄带加热至100℃,保温16天后冷至室温再测其强度,发现明显降低,请解释其原因。
解:(略)
3. 已知H70黄铜(30%Zn)在400℃的恒温下完成再结晶需要1小时,而在390℃完成再
结晶需要2小时,试计算在420℃恒温下完成再结晶需要多少时间?
存在如下关系是:
同理
(1. 4)和(1. 5
)表示成指数表达式为:
以及 可得:
代入数据,可求得:t 3=0.26 hour 。
4. 设有1cm 3黄铜,在700℃退火,原始晶粒直径为2.16⨯10-3cm ,黄铜的界面能为
0.5J/m 2,
由量热计测得保温2小时共放出热量0.035J ,求保温2小时后的晶粒尺寸。
解:由题意得保温两小时所放出的热量是因为热结晶后,晶粒长大导致晶界面积减小而释放能量,由定量金相原理,单位体积晶界面积S 与截面上的晶粒的直径d 之间存在如下关系:
因此: 从而:
代入数据,可以求得d 2=8.9×10-3 cm 。
5. 设冷变形后位错密度为1012/cm 2的金属中存在着加热时不发生聚集长大的第二相微粒,
其体积分数f=1%,半径为1μm ,问这种第二相微粒的存在能否完全阻止此金属加热时再结晶(已知G=105MPa ,b =0.3nm ,比界面能σ=0.5J/m 2)。
解: 再结晶的驱动力可由下式求得:
()220F Gb Gb ρρρ=-≈
(0.12)
其中ρ为再结晶前的位错密度,0ρ
为在再结晶后的位错密度。
再结晶阻力: 代入数据(注意计算时所有物理量的单位都要换算成SI 制),求得驱动力F =9×107 N/m ,F r =7.5×103N/m 。
驱动力F 远大于阻力F r ,因此第二相粒子的存在并不能完全阻止再结晶的发生。
第4次:动态回复和再结晶
1. 简述一次再结晶与二次再结晶的驱动力,并如何区分冷、热加工?动态再结晶与静态再结晶后的组织结构的主要区别是什么?
解:(略)
2.试述提高金属塑性的措施?简述理由。
解:(略)
3.为什么金属材料经热加工后机械性能较铸造态好。
(消除缺陷,流线,组织细化。
)解:(略)
4.总结层错能在位错运动和冷、热加工中所起的作用。
解:(略)
5.
解:1、由再结晶晶粒大小和温度之间的关系:
如果忽略了初始晶粒大小,则(1. 14)可表示为:
对(1. 15)式等式两边同时去对数,有:
拟合可以得到:
可以得到如下方程:
便可以求得Q m 。
2
、作出lnt~1/T 图,可以求得A 和B 的值。
由线性拟合可以得到:A=-27.037,B=17026。
6.
解: 提示如下
完全再结晶的强度可以认为是冷加工前的强度,所以根据题意,要求材料安全系数为2,即要求材料强度为冷加工前强度的2倍,因为性能的恢复大体正比于再结晶量,所以相当于冷加工后材料再结晶退火降低一半强度,对应的再结晶比例为50%。
所以本题目,需要根据上述表格数据回归求得A,B 的值,得到一个公式。
140o C 下使用寿命为5930分钟,100 o C 下使用寿命只要代入上述公式求得。