倒车雷达规范标准(精品)
倒车雷达系统安装及调试细节说明

倒车雷达系统安装及调试细节说明.txt倒车雷达系统安装及调试细节说明介绍本文档旨在提供倒车雷达系统的安装和调试细节说明,帮助用户顺利完成系统的安装和调试过程。
安装步骤1. 确认所需材料:倒车雷达系统、安装工具(如螺丝刀、电线剥皮钳等)、电线束、绝缘胶带。
2. 首先,确定倒车雷达系统的安装位置。
一般来说,安装在车辆后保险杠的中心位置会更有效。
3. 清洁安装位置,确保其表面干净和光滑。
4. 使用螺丝刀固定倒车雷达系统到安装位置。
确保系统稳固不松动。
5. 接下来,将倒车雷达系统的电线束连接到车辆电源。
请参考倒车雷达系统的用户手册,确认正确的连接方式。
6. 使用电线剥皮钳剥开电线束的一端,将其连接到车辆电源。
使用绝缘胶带包裹连接处,确保电线连接牢固且绝缘良好。
7. 将电线束的另一端连接到倒车雷达系统的控制盒。
同样地,使用绝缘胶带包裹连接处。
8. 最后,进行系统的功能测试。
启动车辆,选择倒车挡,在测试区域模拟倒车过程,观察倒车雷达系统是否正常工作。
调试细节1. 在进行调试前,请确保所有的安装步骤已经完成,并且系统安装稳定。
2. 检查倒车雷达系统的控制盒和电线连接是否牢固。
3. 调整倒车雷达系统的灵敏度。
根据实际需要,根据用户手册操作,调整系统的灵敏度。
4. 进行实地测试。
在安全的测试场地,进行实际的倒车测试。
观察倒车雷达系统的工作效果,确保其准确、可靠。
注意事项1. 在安装和调试过程中,务必小心操作,避免造成人身伤害或损坏设备。
2. 如需进一步的帮助或遇到问题,请查阅倒车雷达系统的用户手册或咨询专业的安装人员。
以上是倒车雷达系统安装及调试细节说明。
希望本文档能帮助用户完成系统的安装和调试工作。
如有疑问,请及时与我们联系。
RSOE9倒车雷达企业标准DOC
Q/RS倒车雷达东荣电子(广州)有限公司发布目次前言 (II)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (1)4 测试条件 (2)5 技术要求 (2)6 试验方法 (3)7 环境实验要求 (4)8 检验规则 (4)9 标志、标签和包装 (7)前言本标准是参考QC/T 413-2002 《汽车电气设备基本技术条件》、GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》和GB 18655-2002 《用于保护车载接收机的无线电骚扰特性的限值和测量方法》进行编写的。
本标准由东荣电子(广州)有限公司企业标准品质部归口。
本标准起草单位:东荣电子(广州)有限公司企业标准工程部。
本标准主要起草人:本标准于2007年5月首次发布。
倒车雷达1 范围本标准规定了本公司生产的倒车雷达的要求、试验方法、检验规则、标志、标签和包装。
本标准适用于本公司生产的倒车雷达。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
QC/T 413-2002 汽车电气设备基本技术条件GB2828—1987逐批检查计数抽样程序及抽样表(适用于连续批的检查)GB18052—1987周期检查计数抽样程序及抽样表(适用于生产过程稳定性的检查)GB/T 17619-1998《机动车电子电器组件的电磁辐射抗扰性限值和测量方法》GB 18655-2002《用于保护车载接收机的无线电骚扰特性的限值和测量方法》3 术语和定义3.1 倒车雷达系统通常由倒车雷达主机和雷达探头、蜂鸣器、显示器组成。
通过发射/接收超声波信号,探测汽车后方障碍物距离,用声音提示和显示测量的距离,达到协助驾驶员安全倒车的作用。
线路板检测
倒车雷达线路板检验测试标准2011年6月29日目录1范围 (1)2引用文件 (1)3测试标准 (1)3.1外观测试标准 (1)3.2 上电测试标准 (1)3.3 功能测试 (1)3.4耐温测试 (1)3.5耐振动测试 (2)4电性能测试(标准测试条件:25±3°C,35%到60%相对湿度) (2)4.1电压衰减测试 (2)4.2 耐压测试 (2)5模块结构图 (2)5.1功能结构框图 (2)5.2 模块外部接口定义 (3)6环境测试(标准测试条件:25±3°C,35%到60%相对湿度) (3)6.1距离测试 (3)6.1.1以墙面为障碍物的距离测试 (3)6.1.2 以PVC 棒为障碍物的距离测试 (3)7 探头主要测试参数(与探头配套所得) (4)8 电路板外形图 (4)倒车雷达线路板检验测试标准1范围本规范规定了倒车雷达主机线路板电路测试的详细要求。
本规范的目的保证批量生产的倒车雷达线路板质量合格。
2引用文件GB 3431.2–1986 半导体集成电路文字符号引出端功能符号;汽车7637方案;JB 2261 汽车应用电气设备基本技术条件;GB/T 2828 逐批检查计数抽样程序及抽样表;GB_18655(2002)用于保护车载接收机的无线电骚扰特性的限值和测量方法。
根据以上文件进行法规试验。
3测试标准本标准主要包括:外观测试标准、上电测试标准、功能测试标准、耐温测试标准、耐振动寿命测试标准和电性能测试标准。
3.1外观测试标准1)主机元件摆放整、表面清洁无污垢。
2)三防漆分布均匀。
3)器件无明显的短路。
3.2 上电测试标准1)电源电压为DC13V±10%,主控芯片的工作电压为DC5V±2%,在该范围内为合格,否则不合格。
2)电流测试:主机的总体电流不超过400mA。
超过则为不合格。
3.3 功能测试1)发出的超声波频率为58KH±2%,充电时电压比电源电压低0.5V,输出激励波高电平电压为12V±10%,低电平电压为0V±10%。
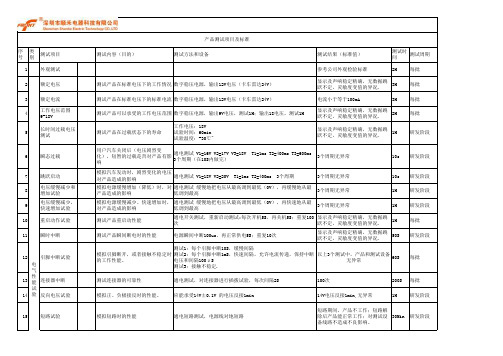
倒车雷达测试项目及标准
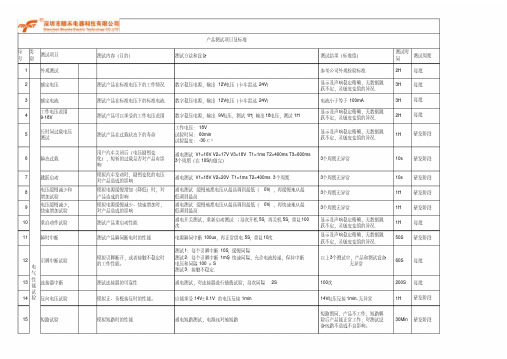
序号类别测试内容(目的)测试方法和设备测试结果(标准值)测试时间测试周期1外观测试参考公司外观检验标准2H每批2额定电压测试产品在标准电压下的工作情况数字稳压电源,输出12V电压(卡车雷达24V)显示及声响稳定精确,无数据跳跃不定,灵敏度变值的异况.3H每批3额定电流测试产品在标准电压下的标准电流数字稳压电源,输出12V电压(卡车雷达24V)电流小于等于100mA3H每批4工作电压范围9-18V测试产品可以承受的工作电压范围数字稳压电源,输出9V电压,测试1H;输出18电压,测试1H显示及声响稳定精确,无数据跳跃不定,灵敏度变值的异况.2H每批5长时间过载电压测试测试产品在过载状态下的寿命工作电压:18V试验时间:60min试验温度:-30℃"显示及声响稳定精确,无数据跳跃不定,灵敏度变值的异况.1H研发阶段6瞬态过载用户汽车关闭后(电压剧烈变化),短暂的过载是否对产品有影响通电测试 V1=16V V2=17V V3=18V T1=1ms T2=400ms T3=600ms3个周期(在10S内做完)3个周期无异常10s研发阶段7跳跃启动模拟汽车发动时,剧烈变化的电压对产品造成的影响通电测试 V1=18V V2=20V T1=1ms T2=400ms 3个周期3个周期无异常10s研发阶段8电压缓慢减少和增加试验模拟电源缓慢增加(降低)时,对产品造成的影响通电测试缓慢地把电压从最高调到最低(0V),再缓慢地从最低调到最高3个周期无异常1H研发阶段9电压缓慢减少,快速增加试验模拟电源缓慢减少、快速增加时,对产品造成的影响通电测试缓慢地把电压从最高调到最低(0V),再快速地从最低调到最高3个周期无异常1H研发阶段10重启动作试验测试产品重启动性能通电开关测试,重新启动测试;每次开机5S,再关机5S;重复100次显示及声响稳定精确,无数据跳跃不定,灵敏度变值的异况.1H每批11瞬时中断测试产品瞬间断电时的性能电源瞬间中断100us,再正常供电5S;重复10次显示及声响稳定精确,无数据跳跃不定,灵敏度变值的异况.50S研发阶段12引脚中断试验模拟引脚断开,或者接触不稳定时的工作性能。
倒车雷达设计
倒车雷达的设计09电气罗卿柯文华孙斌具有语音播报的倒车雷达本系统以AT89S51控制器为核心、40KHz方波信号升压电路、超声波发射换能器、超声波接收换能器、信号放大与整形电路、液晶显示模块、键盘控制电路、语音播报电路、测温电路。
由本系统构建的超声波测距仪具有测量准确,显示便捷,操作灵活,反应迅速,使用方便,系统工作稳定,耗电量低等许多特点。
一、倒车雷达的主要功能概述●实时显示测量距离;●实时显示当前环境温度;●距离1.5m开始语音播报测量距离,尔后每变化0.2m均报告之●当距离小于1.5m蜂鸣器报警●当距离小于0.5m输出紧急停止的灯光警示●具有开机音乐及语音提示●倒车语音注意提示,0.3m时则紧急告示●具有语音播报使能控制;●使用4节AA干电池供电;二、倒车雷达的主要技术指标测量距离:0.25m-3.5m测温范围:-55℃-125℃测量距离精确度:+-15cm实时播报声音功率:0.5W工作电流:100mA(min)、110mA(max)输入电源电压:DC6V二方案论证(一)超声波发射方案方案一基本模拟电路搭建用基本门电路、模拟电路来产生40kHz的方波,电路结构复杂,稳定性差,故障系数大,不易调试。
图1 并联非门的推挽发射电路方案二单片机产生方波并采用非门推挽电路驱动用单片机控制产生40kHz方波,产生的波形平稳。
且由于使用软硬件结合的方式,所以电路结构简单、调试也相对方便。
与第一种方案比较优点是非常明显的。
我们选择了第二种方案。
采用并联非门的推挽电路(如图2)可以防止发射波形的畸变,虽然由于电源电压是5V,发射到超声波换能器的电压不会大于5V,在这种发射电压下不能测量到很远的距离。
但对于倒车雷达来说,足以达到要求.如图1所示.(二)接收电路的方案比较、设计与论证方案一、将接收到的信号采用两级放大电路后,经锁相环LM567选频后送到单片机的外部中断入口(如图4),由于系统要使用单电源供电,所以要使用单电源的高带宽的运算放大器。
倒车雷达测试项目及标准
数字信号发生器
在电压差(高或者低)为1V以内 时,2个设备可以正常通信
1MIN
研发阶段
测试2个设备之间地电压偏移时, 是否可以正常工作
数字信号发生器
测试单个探头的角度
把传感器固定在测试台上,地面铺测试方格布;用一根直径 75mm,高1.2米的PVC管在布上移动,确定探头的角度。
在电压差(高或者低)为1V以内 时,2个设备可以正常通信
1MIN
研发阶段
水平角度 120度,垂直角度60度 1H 每批
测试固定在保险杠上的探头探测范 围
把传感器固定在保险杠上(每个探头之间间距40cm),地面铺测 试方格布;用一根直径75mm,高1.2米的PVC管在布上移动,确定 探头的角度。
可以探测到后方2.0米*1.1米的矩 形区域
2H
每批
测试单个探头的最小探测距离
T1=1ms T2=400ms
3个周期
3个周期无异常
10s
模拟电源缓慢增加(降低)时,对 通电测试 缓慢地把电压从最高调到最低(0V),再缓慢地从最
产品造成的影响
低调到最高
3个周期无异常
1H
模拟电源缓慢减少、快速增加时, 通电测试 缓慢地把电压从最高调到最低(0V),再快速地从最
对产品造成的影响
低调到最高
44±0.5cm宽度范围值内。
产品数据图像显示稳定,各参数 符合产品规定之标准
4H
研发阶段 研发阶段 研发阶段 研发阶段
34
(防潮)防水和 绝缘试验
测试产品的防潮性能
将产品置于潮湿试验箱内,调节箱内环境为25℃±2℃ 91%-95% 相对湿度,保持48小时后取出,立即用吸水纸吸去样件上可见水 珠,即时在安定器外壳上施加为时1分钟500V直流电压后测定绝 缘电阻。
倒车雷达
汽车倒车雷达的安装
一、实习内容
1、汽车倒车雷达的安装
二、实习要求
1、了解汽车倒车雷达的组成;
2、了解汽车倒车雷达的工作原理;
3、掌握汽车倒车雷达的安装方法。
三、教具和工具
1、汽车倒车雷达两套(随倒车雷达原配保险杠上钻孔的专用探头);
2、不同规格的十字改锥、剥线钳、内梅花、剪钳、电动钻头等。
四、注意事项
1、各部件间的连接请用随机提供的专用线连接;
2、在安装时应注意防止压扁、刺穿、切断、延长各连接线;
3、系统请在断电时安装、维护。
五、汽车倒车雷达的安装
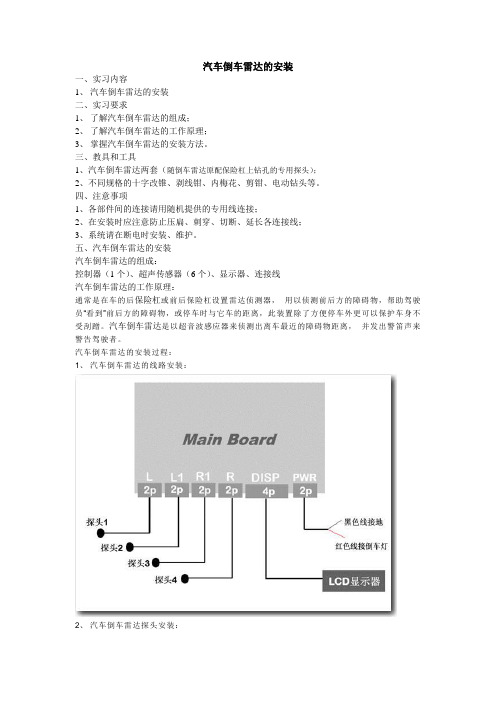
汽车倒车雷达的组成:
控制器(1个)、超声传感器(6个)、显示器、连接线
汽车倒车雷达的工作原理:
通常是在车的后保险杠或前后保险杠设置雷达侦测器,用以侦测前后方的障碍物,帮助驾驶员“看到”前后方的障碍物,或停车时与它车的距离,此装置除了方便停车外更可以保护车身不受刮蹭。
汽车倒车雷达是以超音波感应器来侦测出离车最近的障碍物距离,并发出警笛声来警告驾驶者。
汽车倒车雷达的安装过程:
1、汽车倒车雷达的线路安装:
2、汽车倒车雷达探头安装:
六、思考题
1、汽车倒车雷达的组成?
2、汽车倒车雷达的工作原理?。
【精品】倒车雷达4幻灯片

度来考证。探测范围至少在0.4米到1.5米间;准确性主要看两个方面,首先看显 示分辨率,一般为10厘米,好的能达到1厘米,其次看探测误差,即显示距离与 实际距离间的误差,好产品的探测误差低于3厘米;显示稳定性指在障碍物反射 面不好的情况下,能否捕捉到并稳定显示出障碍物的距离;捕捉目标速度反映倒 车雷达对移动物体的捕捉能力。倒车雷达性能方面的要求是:测得准、测得稳、 范围宽和捕捉速度快。
安装时注意事项:
• 1)探头安装的高度,要求距离地面50CM左右, 如果安装过低,会探测到地面,探头后都会有 一个UP,一个小箭头的标致,小箭头向上就可 以,但有特别车型,保险杠弯度特别,个别需要 调节一下 2)有经验的安装技工,在开孔安装时,会对探 头卡胶或开孔修整一下,免得把探头压得太 紧,而让它无法正常工作,(探头是振动发出超 声波),当然,也不能过松,免得车的振动而让 探头改变方向探测到地面产生误报.
◆检测 距离: 车前:0.3—1.0m
◆工作 电压: dc12v(+-2v)
◆工作 电流: 20ma-
200ma
最大功率:2w
◆超声波频
率: 40khz
探测角度:
h>80度 v>70度
◆工作 温度: -20c ~+80c
警示音量:>70DB
安装尺寸及位置
雷达安装布线示意图
工作原理
钻孔探头式倒车雷达安装程序 1检查车辆情况然后以表格形式进行登记; 2:清点尾箱物品,如有贵重的物品要交待清楚; 3检查电路是否正常, 查找倒车灯线路,并选择可以接地的搭铁位置; 4检查打孔部位,保险杠与车体连在一起的连接部位,我们计划安装的部位要绕 过连接部位; 5:测量打孔距离:首先以后备箱两边灯为基本点确定两个探头的位置,然后测量 中间距离除以3,得到中间两个探头的位置,上下左右必须一致,地面距离与打孔 部位间的距离最好是50厘米; 6:拆后备箱的塑料件,然后找主板安装位置,最好主板不要沾水,拆时注意不要损 坏任何部件。 7:布探头线,首先以ABCD的顺序从左到右穿入孔内,线的一端最好先密封,注意 探头后边的箭头符号向上,线向下,然后在底部进行固定,但要注意,线不能与排 气筒连在一起,也不能太松,最后从尾箱下边穿入里边, 8:布主线,先确定显示器的位置,然后从前边往后开始布线,在布线过程中,如果 有要拆的部位不能损坏部件,一直把线布入尾箱。 9:接线,把车钥匙转入Acc或0N,再把汽车档位放入R档,看倒车灯是否亮,然后用 电笔进行测试,最好多测试几次,把测试出的这条线与电源线进行连接 10:地线CND,找任意搭铁部位即可,但不能影响美观; 11:测试产品,把所有的线与主板联接起来,然后以ABCD的顺序测试每个探 头的灵敏度; 12:固定主板,收好线路,所有东西复原; 13:向客户解说功能作用,所有东西复原填好质保卡。
倒车雷达1

摘要:设计了一种基于超声波测距原理的倒车雷达系统,给出了声光报警模块、电源模块、人机交互模块的具体实施方案。
此外,设计中还包括温度自动校正功能,以减小由于声速受到温度影响而引入的测量误差。
实际测试结果表明,有效测距范围在0.05~5.7 m, 5 m以内的最大误差不超过0.01 m.倒车雷达全称叫"倒车防撞雷达",也叫"泊车辅助装置",是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。
能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时倒车雷达就成了汽车的好助手。
倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况。
本文以ATmega16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统电路设计合理,工作稳定,性能良好,精度高,实时检测速度快,在未来市场上将有一定的实用价值。
1 超声波测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 .这就是所谓的时间差测距法。
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
由此可见,超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T 式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
倒车雷达规范标准

倒车雷达技术规范(1)2012-06-25 16:19:33 来源:21ic关键字:倒车雷达规范性警报状态1 范围本标准规定了车用倒车雷达的分类与名词解释、要求、试验方法、检验规则和标志、包装、运输、贮存等内容。
2 规范性引进文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
3 分类与名词解释3.1分类数字信号倒车雷达。
型号命名PS220.(J)-01、PS220.(J)-02、PS220.(J)-03…3.2.1无警报状态车辆未挂入倒车档,倒车雷达系统等待进入工作的状态。
3.2.2激活状态当车辆挂入倒车档后,倒车雷达所处的状态。
3.2.3自我检测状态当倒车雷达系统被激活后,会对系统本身(包括:火线,接地线,内部信号处理线路等)进行测试,当发现有断路或故障时蜂鸣器会处于一种循环报警状态。
如果故障排除系统会自动进入侦测状态。
3.2.4侦测报警状态系统正常的工用状态。
在此时期间如果系统侦测到障碍物,也就是蜂鸣器接到报警命令进行报警。
4 要求4.1外观要求外观整洁,表面不应有明显凹痕,划伤,锈蚀,印字清晰,正确,紧固部位无松动,传感器表面喷涂应与所安装的保险杠表面喷涂颜色统一。
4.2环境要求4.2.1使用环境温度a.超声波探测器:-30℃~80℃b.主机控制器:-30℃~80℃c.显示器(液晶屏):-25℃~65℃4.2.2贮存环境温度a.超声波探测器:-40℃~85℃b.主机控制器:-40℃~85℃c.显示器(液晶屏):-30℃~70℃4.2.3相对湿度3%~93%4.3电器性能要求4.3.1超声波探测器a.额定工作电压:120V(40KHz±1 KHz脉冲)c.工作电压范围:50V~160V(40KHz±1 KHz脉冲)d.最大过载电压:180V(40KHz±1 KHz脉冲)持续1秒e.工作频率:40KHz±1 KHzf.谐振电容:2000pF±15%(本文转自电子工程世界:/qrs/2012/0625/article_10712.html) g.回波灵敏度:≥-80dBh.余振:≤1.4msi.阻抗:500Ωh.最大工用温度:85℃i.最小工作温度:-40℃表面没有冰雪覆盖的情况下g.电流消耗关闭状态≤1mA开启状态≤10mA4.3.2主机控制器a.额定工作电压:12V直流电b.额定功率:≤5Wc.工作电压范围:9~16V直流电d.最大过载电压:24V直流电持续1秒e.反向电压:-18V直流电持续1秒f.最大工用温度:80℃g.最小工作温度:-30℃h.电流消耗关闭状态《2mA在12V直流电下开启状态《300mA在12V直流电下i.辐射频率:《1MW CWg.工作频率:40KHz±1 KHzk.频率波段中的虚拟散失41MHz~68MHz《4nW87.5MHz~118MHz《4nW162MHz~230MHz《4nNW470MHz~862MHz《4nNW等于1GHZ《250nW大于1GHZ《1uW4.3.3显示器(液晶屏)a.额定工作电压:12V直流电b.额定功率:≤5Wc.工作电压范围:9~16V直流电d.最大过载电压:24V直流电持续1秒e.反向电压:-18V直流电持续1秒f.最大工用温度:65℃g.最小工作温度:-25℃h.电流消耗关闭状态《2mA在12V直流电下开启状态《400mA在12V直流电下休眠状态:《10mA在12V直流电j.蜂鸣器音量:(85±10)dB/10m/12V直流电下。
倒车雷达
超声波倒车测距仪摘要超声波倒车测距仪是针对当前公路、街道、停车场、车库等越来越拥挤,加上存在视觉盲区,无法看见车后的障碍物,司机在倒车时很容易刮伤汽车,甚至发生事故的情况而出现的一种旨在倒车防护的汽车防撞系统。
该系统能够在汽车以较低的速度进行倒车的过程中,识别出车后部的障碍物,并能够测量车与障碍物之间的距离,在车辆与障碍物发生碰撞前,发出声光报警,提醒司机刹车。
本设计从实验研究分析的角度,分析了超声波测距原理以及国内外此类汽车倒车雷达存在的问题,运用理论分析、计算机仿真等研究手段,完成了倒车测距仪硬件和软件的设计,并在测距算法上进行了改进,使测距速度更快。
系统设计中采用了模块设计思想,简化了调试工作量,最终很好完成了超声波测距倒车雷达系统的硬件设计、软件设计及系统调试。
关键词:汽车倒车测距仪超声波系统仿真AbstractAutomobile Reversing range finder is a protection system which appeared in the condition of that the cars are scratched easily, even some of the accidents happen when drivers reverse, for the reason of that the current highway, street, parking lots and garages are getting more crowded, and the drivers are unable to see obstacles behind the vehicle because of the existence of visual blind spots, aimed at prevent a car crash when reversing. The reversing radar system, which can recognize the barrier at the back of car when the vehicles reverse at a low speed, and is capable of measuring the distance between the vehicle and obstacles, warned the drivers to brake at the way of sound and light, before the collision occurred.The design analyzes how the ultrasonic measure distance and what the problem of the other automobile Reversing range which have appeared at home and abroad are, from the perspective of research and analysis, and carry out the automobile Reversing range finder using the theory of analysis、computer simulation and so on. It is something improved in the measure programme for measure quickly. A modular design concept was used at the process of designing the system, it simplifies the debugging workload. Ultimately, hardware design, software design and system debugging about the ARR was completed very well.Keywords:Automobile Reversing range finder Ultrasonic Computer Simulation目录摘要 (I)Abstract (II)目录 (III)第一章绪论 (1)1.1 选题背景 (1)1.2 发展概况和当前存在的问题 (1)1.3 本设计的主要内容和目的 (3)1.4 本设计的主要问题和技术要求 (3)第二章系统构建与方案设计 (4)2.1 系统构建 (4)2.2 超声波测距原理 (4)2.3 超声波特点 (5)2.3 系统方案选择 (7)2.4 课题研究的方案 (8)第三章系统的硬件设计 (9)3.1 系统总体方案设计 (9)3.2 STC89C51RC单片机简介 (10)3.3 电源部分的设计 (12)3.4 LCD液晶显示模块 (14)3.5 温度补偿电路 (14)3.6 超声波发射和接收电路 (15)3.7 语音实时播报电路 (17)第四章系统的软件设计 (20)4.1整体程序设计 (20)4.2主程序的结构 (20)4.2 基本功能模块设计 (22)第五章系统调试 (29)5.1硬件调试 (29)5.2软件调试 (29)5.3系统测试 (30)5.4误差分析 (31)结束语 (33)参考文献 (34)致谢....................................错误!未定义书签。
《倒车雷达》课件

倒车雷达的作用与优势
提升安全性
倒车雷达能够及时发现隐形 的障碍物,避免碰擦和撞击。
简化驾驶
驾驶员无需过多依赖后视镜, 倒车雷达能够提供准确的距 离提示和指引。
节省时间与金钱
避免因倒车操作不当造成的 事故或损坏,节省维修费用 和保险理赔。
市场需求
1 市场现状与趋势
汽车市场对倒车安全设备 的需求不断增加,倒车雷 达成为标配或选配。
我们的竞争优势
我们的倒车雷达具有高精度、 可靠性高、价格合理等竞争优 势。
销售与营销策略
1
市场定位与定价策略
我们将定位为高品质、性价比较高的倒车雷达供应商,并提供多个档次的产品与汽车专卖店合作销售,并通过线上广告、展览会等方式进行推广。
3
销售计划与目标
我们制定了明确的销售计划和目标,包括销售额、市场份额等指标。
未来发展与展望
市场增长预测
预计倒车雷达市场将保持稳定增长,并逐渐成为汽车安全设备的标准配置。
《倒车雷达》课件
本课件将介绍倒车雷达在汽车领域中的作用与优势,市场需求和竞争分析, 销售与营销策略以及未来发展与展望。
什么是倒车雷达
倒车雷达是一种安装在汽车后部用于辅助倒车的装置。它利用超声波或摄像 头等技术,能够检测到后方障碍物的距离和位置,帮助驾驶员安全倒车。
倒车雷达的原理
倒车雷达利用超声波技术发射无形的声波信号,并通过接收器接收回波信号。 根据回波信号的时间和频率,倒车雷达能够计算出障碍物与车辆的距离和位 置。
2 目标客户群体
倒车雷达适用于所有驾驶 者,特别是新手和年长驾 驶者。
3 市场需求与潜在机会
安全性和便利性的需求使 得倒车雷达具有广阔的市 场前景和发展空间。
倒车雷达探头位置及安装
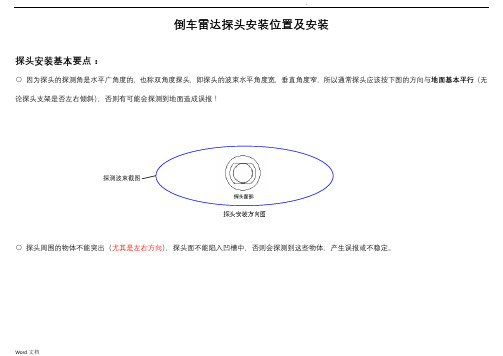
倒车雷达探头安装位置及安装探头安装基本要点:○因为探头的探测角是水平广角度的,也称双角度探头,即探头的波束水平角度宽,垂直角度窄,所以通常探头应该按下图的方向与地面基本平行(无论探头支架是否左右倾斜),否则有可能会探测到地面造成误报!探测波束截图○探头周围的物体不能突出(尤其是左右方向),探头面不能陷入凹槽中,否则会探测到这些物体,产生误报或不稳定。
○探头安装高度一般为550-700mm,太低会误报地面,太高有可能测不到儿童等低矮物,最后还需在实际使用中确定。
探头安装要求理想的指向角应该上翘(5~10°)或与地面平行;安装高度应为550~700mm(有载时),否则有误报地面的可能。
一般情况下探头位置偏上装,离地面远一点。
理想的指向角不佳的指向角理想的后保角度不佳的后保角度后轮地面○ 探头尾部不能受到强制,要有一定的自由度如下图:此段线不能紧绷,但也不要过于松垮,要领是松而不垮在探头附近应有一个固定点○安装探头时,用手按压超声波探头正面靠边缘的塑料处,(不要按压超声波探头正面中央部分)。
按一下后放一下再按,这样压放多次,如果超声波探头不到位,可捏住探头尾部(不是导线),轻轻左右旋转同时后拉,直到伏贴到位为止。
到位后要注意旋正探头方向。
○卸下探头时,应轻旋探头尾部往前送,当探头前部有少许空隙时即用手指抠住胶套将探头向前轻轻拔出,以保证胶套与探头塑件不分离。
探头位置不佳引起误报的案例(误报—即车辆后侧无目标但连续或间断报警):案例一:探头方向不对案例二:探头陷入其它物体,即探头周围的物体比探头面更突出,造成声波附加反射导致误报。
案例三:水平位置有突出的物体周围突出的物体(尤其是左右方向),会产生镜面反射,导致误报或不稳定。
因为探头是广角的,灵敏度又很高,在水平方向远离探头2m 的障碍物(指车辆上的)可能会出现附加辐射,见下图:衍射反射波衍射反射波车辆上正对探头的障碍物探头车辆上正对探头的障碍物整改:采用增加装声波“耳廓”使声波绕开障碍物:车辆上正对探头的障碍物注意:·声波挡板(耳廓)的材料是金属、塑料、橡胶等都可以,需能耐久; ·图纸中尺寸为参考值,需要实验,可用橡皮泥试,注意必须要有一定的保险余量,否则当环境变化或车辆尺寸的离散性等因数,又会产生误报; ·注意声波挡板(耳轮)的形状两头采用斜面或圆头,为的是不会刮伤人,也防止人用脚踩站;整改后:50-80mm20-30mm外加的“耳廓”另一种整改方案:因为是斜面,声波无法返回探头,解决了误报采用声波整流板(将镜面反射改为斜面反射),可采用铁板,但不要有突出(声波整流板尺寸可略低于、小于尾灯),以防刮伤人。
汽车倒车雷达安装

汽车倒车雷达第一节倒车雷达基础知识倒车雷达是一项集超声波、光电子、电脑自动数据处理为一体的高科技产品。
它由超声波探测器、微电脑及显示器三部分组成,其工作原理是:利用超声波信号探测到车前后障碍物,经过微电脑信号处理后,计算出车前后障碍物的距离,传至显示器,并利用数字、灯光、声音三种告警功能显示出来,使司机根据显示出来的情况及时处理,避免事故发生。
一、技术指标:1、工作电压: 12V 或 24V 。
、2、工作电流: 200mA 。
3、探测范围: 0.3—3 米,周围辐射角 60 度。
4、超声波频率: 40KHZ .二、倒车雷达的作用:提示司机——车辆与障碍物的距离,防正车辆与障碍物相碰撞三、倒车雷达的安装方式:内置:装在保险杠里,需在保险杠上打孔。
外置:直接贴在保险杠上。
四、倒车雷达的种类:一般可分为两探头、四探头、六探头、八探头。
五、倒车雷达的组成:1 、超声波传感器:发出超声波信号,探测车体前后与障碍物的距离。
2 、主机:接收信号,经电脑处理后发送到显示器。
3 、显示器:显示出主机发送来的数字、灯光信息。
第二节倒车雷达安装基本流程一、倒车雷达安装的步骤与方法1 、量尺寸:保险杠的两边各除去10mm ,按所装倒车雷达的探头数分成几等份(例两探头分成两等份)2 、打孔:在保险杠上按分好的点用专用工具进行打孔。
3 、穿线:从孔洞把探头的线束穿到安装主机的位置4 、安装:将线束穿过后,将探头嵌入孔中。
二、倒车雷达分部及电源线的连接:1 、两探头和四探头全都是安装在后保险杠上,它的电源连接方法是红线与倒车灯的正极相接,黑线负极搭铁。
2 、六探头的是后保险杠上装四个,前保险杠上装两个,它的电源连接法是红线与 OX 线即点火线相接,黑线负极搭铁。
3 、八探头的是前保险杠上装四个,后保险杠上装四个,它的电源连接法与六探头的相同。
4 、电源接好后,将各探头线和显示器线分别与主机端口相接即可。
三、安装倒车雷达注意事项1 、探头一定要安装在一个水平上,探头之间距离必须相等。
倒车雷达测试及评价试验规范

Q/SQR 奇瑞汽车股份有限公司企业标准Q/SQR . x x. x x x - 2008倒车雷达性能台架测试及评价试验规范奇瑞汽车股份有限公司前言本规范主要规定了奇瑞汽车股份有限公司系列车倒车雷达系统性能测试方法、试验条件。
本规范的编写与表述按奇瑞汽车股份有限公司企业标准Q/《倒车辅助系统技术要求》及ISO 17386-2003进行。
本规范是在满足奇瑞汽车产品性能要求的前提下制定的。
本标准作为公司开发新产品和抽检配套供应商供货质量的依据。
本规范由奇瑞汽车股份有限公司试验技术中心提出。
本规范由奇瑞汽车股份有限公司汽车工程研究院归口本规范起草单位:奇瑞汽车股份有限公司试验技术中心本规范首次发布日期是2008年XX月XX日。
本规范主要起草人:李川、郑春平、周琴倒车雷达性能台架测试及评价试验规范1 范围本规范适用于奇瑞汽车有限公司生产的系列车型所用倒车雷达系统台架性能测试及评价。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
Q/ 倒车辅助系统技术要求ISO 17386-2003 Intelligent Transportation Systems.Manoeuvring Aids for Low Speed Operation.Performance requirements and test procedures3 试验条件试验环境条件环境温度:23℃±5℃相对温度:25~75%气压:86~106kPa试验电压:13±4 性能要求探测区域分类根据Q/及ISO 17386-2003要求,把倒车雷达探测距离分为5段,见图1:OA(0~20cm]:由倒车雷达探头换能器工作原理决定,该区域为不定状态区域,因此在测试过程中可以不进行测试;OS(0~35cm):为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声长鸣;SB[35~60cm]:为急停区域,当障碍物出现在在区域内时,必须停车,且声音报警声急促4Hz;BC(60~90cm]:为缓行区,在该区域内,车辆应该减慢车速,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率2Hz;CD(90~150cm]:为预警区,表示障碍物已经进入车辆倒车辅助系统进行提示作用,保证车速在5km/h内(在实际行驶过程中),且声音报警声频率1Hz。
机动车辆倒车影像法规
机动车辆倒车影像法规随着汽车技术的不断发展,越来越多的车辆配备了倒车影像系统。
这一系统通过安装在车辆后部的摄像头,将倒车时的景象传输到车内的显示屏上,帮助驾驶员更加清晰地观察后方情况,提高倒车的安全性。
然而,倒车影像系统的使用也需要遵循相应的法规。
根据相关法规规定,机动车辆倒车影像系统应当具备以下基本要求。
在实际使用中,驾驶员在倒车时也需要遵守一定的规定。
首先,驾驶员在倒车前应打开倒车影像系统,并观察显示屏上的画面,确保能够清晰地看到后方情况。
其次,驾驶员在倒车时应保持警觉,不仅要观察显示屏上的画面,还要通过后视镜等其他方式观察后方情况,以免出现盲区。
同时,驾驶员在倒车时应注意观察左右两侧的情况,避免与其他车辆或行人发生碰撞。
最后,驾驶员在倒车过程中应缓慢驾驶,保持适当的车速,以免发生意外事故。
倒车影像系统的使用也需要注意一些特殊情况。
例如,在夜间或者恶劣的天气条件下,倒车影像系统的效果可能会受到一定的影响,此时驾驶员需要更加谨慎地操作,确保倒车的安全。
另外,倒车影像系统虽然能够提供后方情况的画面,但并不能完全取代驾驶员的判断和观察能力,驾驶员在倒车时仍然需要全神贯注地注意后方情况。
对于违反倒车影像法规的行为,相关法规也进行了相应的规定。
根据《中华人民共和国道路交通安全法》的规定,驾驶机动车辆在倒车过程中不按规定使用倒车影像系统,或者不按照规定操作倒车影像系统的,将会受到相应的处罚。
因此,驾驶员在使用倒车影像系统时应严格遵守相关法规,确保倒车的安全。
机动车辆倒车影像系统的使用需要遵守一定的法规。
驾驶员在倒车时应严格按照规定操作倒车影像系统,保持警觉,缓慢驾驶,观察后方情况,并注意特殊情况下的安全。
只有做到这些,倒车影像系统才能发挥其应有的作用,提高倒车的安全性。
35-8倒车雷达
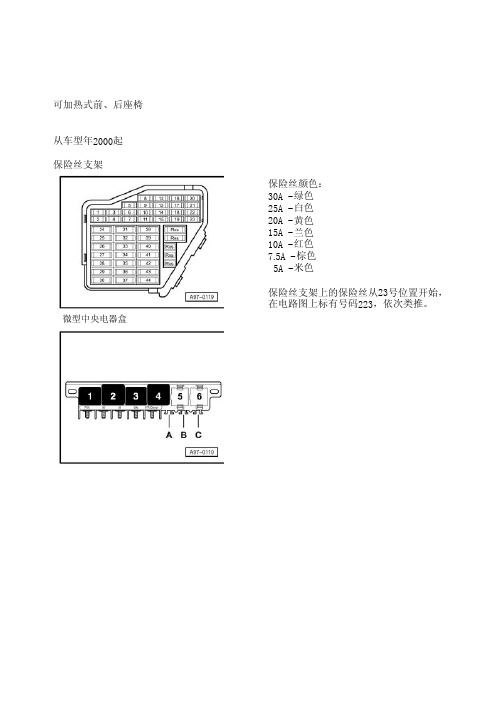
可加热式前、后座椅从车型年2000起保险丝支架微型中央电器盒保险丝颜色:30A - 绿色25A - 白色20A - 黄色15A - 兰色10A - 红色7.5A - 棕色5A - 米色保险丝支架上的保险丝从23号位置开始,在电路图上标有号码223,依次类推。
短超声波倒车警报系统ws = 白色sw = 黑色ro = 红色br = 棕色gn = 绿色bl = 兰色gr = 灰色li = 紫色ge = 黄色DH15 J218 J446 KS5 T6ar T16a T16c T32----------点火开关倒车警报峰鸣器仪表板内组合处理器倒车警报控制单元自诊断接线保险丝支架上保险丝插头,6孔,白色,右侧A柱分线器,倒车警报插头,16孔,自诊断插头插头,16孔,在倒车警报控制单元上插头,32孔,兰色,在仪表板上接地点,左侧A柱下部接地连接-4-,在后部线束内正极连接(15),在仪表板线束内连接(15a),在仪表板线束内连接(自诊断K线),在仪表板线束内连接(车速信号),在仪表板线束内------44197A2A20A76A108超声波倒车警报系统ws = 白色sw = 黑色ro = 红色br = 棕色gn = 绿色bl = 兰色gr = 灰色li = 紫色ge =黄色F4F125G203G204G205G206J446T3ar T3au T6a ----------倒车灯开关多功能开关左后倒车警报传感器左后中部倒车警报传感器右后中部倒车警报传感器右后倒车警报传感器倒车警报控制单元插头,3孔,棕色,右侧A 柱分线器插头,3孔,红色,压力舱电器盒分线器插头,6孔,兰色,左侧A 柱分线器T6ar T12b T16c A87***------插头,6孔,白色,右侧A 柱分线,倒车警报插头,12孔,黑色,在倒车警报控制单元上插头,16孔,在倒车警报控制单元上连接(右前),在仪表板线束上带手动变速器的车带自动变速器的车。