通用型压力传感器KH41列
第六章 自感式传感器 ppt课件

L f ,S
线圈中放入圆形衔铁
ppt课件
L f1 变气隙型传感器
L f2 S 变截面型传感器
可变自感 螺管型传感器。
7
6 自感式传感器
6.1 工作原理 6.2 变气隙式自感传感器 6.3 变面积式自感传感器 6.4 螺线管式自感传感器 6.5 自感式传感器测量电路 6.6 自感式传感器应用举例
螺旋管
l r
铁心 x
ppt课件 单线圈螺管型传感器结构图
19
6.4 螺线管式自感传感器
差动式螺管型传感器结构图
1-螺线管线圈Ⅰ; 2-螺线管线圈Ⅱ; 3-骨架; 4-活动铁芯
L0
L10
L20
r 2 m0W 2
l
1
mr
1
rc r
2
lc l
ppt课件
17
6 自感式传感器
6.1 工作原理 6.2 变气隙式自感传感器 6.3 变面积式自感传感器 6.4 螺线管式自感传感器 6.5 自感式传感器测量电路 6.6 自感式传感器应用举例
ppt课件
18
6.4 螺管型自感传感器
有单线圈和差动式两种结构形式。 单线圈螺管型传感器的主要元件为一只螺管线圈和一根 圆柱形铁芯。传感器工作时,因铁芯在线圈中伸入长度的变 化,引起螺管线圈自感值的变化。当用恒流源激励时,则线 圈的输出电压与铁芯的位移量有关。
ppt课件
16
6.3 变面积式自感传感器
传感器气隙长度保持不变,令磁通截面积随被测非电量 而变,设铁芯材料和衔铁材料的磁导率相同,则此变面 积自感传感器自感L为
L
l
W2 l
《军事技术》章节
《军事技术》章节《军事技术》章节一、单选题1、新能源技术群是当代高技术群的(D)A、基础B、核心C、发展方向D、动力2、军事应用技术中,军事工程技术的划分依据是(A)A、按完成的军事任务的性质分B、按研制的武器装备种类分C、按军事技术应用领域分D、按军事技术的应用者分3、现代战争手段的核心是(C)A、兵力B、武器装备C、信息能力D、作战空间4、将现代侦察监视技术分为光学侦察、电子侦察和声学侦察的依据是(B)A、按照不同兵种的任务范围B、按照实现探测和识别的技术原理C、按照侦察监视所采取的手段D、按照各种运载侦察监视技术装备平台的活动区域5、远程战场侦察雷达可以探测的范围是(C)A、10-20千米B、15-20千米C、20-30千米D、25-30千米6、近程雷达可以探测的物体质量是(C)A、1.5千克以内B、2.0千克以内C、2.5千克以内D、3.0千克以内7、近程警戒雷达的探测距离是(C)A、100-150千米B、150-200千米C、200-300千米D、300-350千米8、中程警戒雷达的探测距离是(B)A、300-400千米B、300-500千米C、400-500千米D、400-600千米9、近程战场雷达可探测的范围是(D)A、0.2-3千米B、0.3-3千米C、0.4-3千米D、0.5-3千米10、超远程警戒雷达的探测距离是(C)A、2000千米B、3000千米C、4000千米D、5000千米11、相控阵雷达的天线面阵可以实现全方位探测的角度为(D)A、90°B、180°C、270°D、360°12、震动传感器通常分别能探测到人和车的范围是(B)A、20米,200米B、30米,300米C、40米,400米D、50米,500米13、声音传感器可以探测人员间的正常谈话的距离是(C)A、30米B、35米C、40米D、45米14、磁性传感器对目标探测的响应速度快,通常为(C)A、15秒B、20秒C、25秒D、30秒15、红外传感器一般需要人工布设,固定在某物体上,在视角的扇面内可探测目标的范围是(D)A、10-30米B、10-50米C、20-40米D、20-50米16、下列属于电子侦察卫星的是(B)A、“锁眼”KH-11B、大酒瓶C、“白云”号D、“长曲棍球”17、美国E-3A预警机上装备的计算机容量大,运算速度快,可同时跟踪目标(C)A、500个B、550个C、600个D、650个18、以下属于半主动式寻的制导的是(B)A、“飞鱼”反舰导弹B、中国的HQ-61C、“响尾蛇”系列空空导弹D、英国的“海蛇”航空导弹19、景象匹配制导精度较高,其制导精度为(C)A、小于5米B、小于8米C、小于10米D、小于12米20、近程导弹的射程为(C)A、小于500米B、小于800米C、小于1000米D、小于1200米21、远程导弹的射程为(C)A、2000-3000千米B、3000-5000千米C、3000-8000千米D、4000-8000千米22、激光制导炮弹的射程为(C)A、2-20千米B、2-30千米C、3-20千米D、3-30千米23、脱离速度是(B)A、10.2千米/秒时B、11.2千米/秒时C、12.2千米/秒时D、13.2千米/秒时24、逃逸速度是(C)A、14.7千米/秒时B、15.7千米/秒时C、16.7千米/秒时D、17.7千米/秒时25、具有“太空中的耳朵”之称的是(A)A、电子侦察卫星B、导弹预警卫星C、海洋监测卫星D、核爆炸检测卫星26、空天飞机在30-100千米高度飞行的速度是音速的(D)A、10-20倍B、10-25倍C、12-20倍D、12-25倍27、电子侦察卫星的轨道一般选在(D)A、200-800千米B、200-1000千米C、300-800千米D、300-1000千米28、用于截获敌方光电辐射信号的电子对抗设备是(C)A、通信对抗侦察设备B、雷达对抗侦察设备C、光电对抗侦察设备D、反电子侦察设备29、电子干扰器材是指能反射或吸收电磁波的器材,包括反射体和吸收层。
《传感器技术》教学课件第6章
当晶体受到沿y轴方向的压力作用时,晶体的变形如图6-4 (c)所示。与图6-4(b)情况相似,P1增大,P2、P3减小。在x 轴上出现电荷,它的极性为x轴正向为正电荷。在y轴方向上仍 不出现电荷。
如果沿z轴方向施加作用力,因为晶体在x方向和y方向所产 生的形变完全相同,所以正负电荷重心保持重合,电偶极矩矢 量和等于零。这表明沿z轴方向施加作用力,晶体不会产生压电 效应。
a、b——晶体切片的长度和厚度。
电荷qx和qy的符号由受压力还是受拉力决定。
15
上述讨论假设晶体沿x轴和y轴方向受到的是压力, 当晶体沿x轴和y轴方向受到拉力作用时,同样有压电效
应,只是电荷的极性将随之改变。石英晶片上电荷极性 与受力方向的关系如图6-3所示。
图6-3 晶体切片上电荷极性与受力方向的关系
在自然界中大多数晶体都具有压电效应,但压 电效应十分微弱。随着对材料的深入研究,发现石 英晶体、钛酸钡、锆钛酸铅等材料是性能优良的压 电材料。
7
表6-1 常用压电材料的性能参数
8
6.1.1 压电晶体
以石英晶体为例,它是单晶体中具有代表性同时也是应用 最广泛的一种压电晶体,化学式为SiO2。图6-2(a)表示了天 然结构的石英晶体外形是一个正六面体。
当压电元件受外力作用时,两表面产生等量的正、负电荷Q, 压电元件的开路电压(认为其负载电阻为无限大)U为:
压电常数 压电效应强弱:灵敏度 弹性常数(刚度) 固有频率、动态特性 介电常数 固有电容、频率下限 机电耦合系数 机电转换效率 电阻 泄漏电荷、改善低频特性 居里点 丧失压电性的温度
6
压电材料可以分为两大类:压电晶体和压电陶 瓷。压电材料要求具有大的压电系数,机械强度高, 刚度大,具有高电阻率、大介电系数和高居里点, 温度、湿度和时间稳定性好等特点。
传感器与检测技术习题与参考答案

传感器与检测技术习题与参考答案1、在典型噪声干扰的抑制方法中,采用RC吸收电路的目的是()A、克服串扰B、抑制共模噪声C、抑制差模噪声D、消除电火花干扰答案:D2、传感器输出量的变化量△Y与引起此变化的输入量的变化量△X之比,称为( )A、灵敏度B、阈值C、分辨力D、满量程输出答案:A3、压电陀螺的作用是检测运动物体的()A、角速度B、线速度C、线位移D、角位移答案:A4、属于传感器静态特性指标的是()A、稳定时间B、阻尼比C、时间常数D、重复性答案:D5、压电式传感器属于( )A、电流型传感器B、结构型传感器C、物性型传感器D、电压型传感器答案:C6、气敏传感器检测气体的( )A、温度和成份B、温度和浓度D、成份和浓度答案:D7、下列线位移传感器中,测量范围大的类型是()A、变极距型电容式B、差动变压器式C、自感式D、电涡流式答案:B8、为了进行图像识别,应当先消除图像中的噪声和不必要的像素,这一过程称为()A、前处理B、编码C、压缩D、后处理答案:A9、下列传感器,不适合于静态位移测量的是( )A、电感式位移传感器B、压电式位移传感器C、涡流式位移传感器D、压阻式位移传感器答案:B10、圆筒电容式液位高度传感器属于()A、变面积型B、变介质型C、变间隙型D、变极距型答案:B11、属于传感器静态特性指标的是( )A、阻尼比B、稳定性C、固有频率D、时间常数答案:B12、热敏电阻式湿敏元件能够直接检测()B、温度差C、温度D、相对湿度答案:A13、心电图信号为( )A、离散信号B、共模信号C、模拟信号D、数字信号答案:C14、霍尔式转速传感器测量转速时,当被测物上的标记数2:4,传感器输出周期信号的频率f=200Hz时,则轴的转速为()A、1500r/minB、2000r/minC、2500r/minD、3000r/min答案:D15、在标定传感器时,正行程的最大偏差与反行程的最大偏差可用于确定传感器的A、重复性B、线性度C、分辨率D、迟滞特性答案:A16、用电涡流式速度传感器测量轴的转速,当轴的转速为50r/min时,输出感应电动势的频率为50 Hz,则测量齿轮的齿数为()。
传感器及基本特性

H max H max 100%或者 H 100% YF .S 2YF .S
2018/9/10
24
重复性 是指在同一工作条件下,输入量按同一方向连续变动多 次所得特性曲线的不一致性。
Rmax R 100% YF .S
△Rmax—同一激励量对应多次循环的同向行程响应量的 极差。
2018/9/10
一阶传递函数的频率特性
35
n n1 m m1
(an D an1D a1D a0 )Y (t) (bm D bm1D b1D b0 ) X (t)
利用拉氏变换得到
(an S n an1S n1 a1S a0 )Y (S ) (bm S m bm1S m1 b1S b0 ) X (S )
2018/9/10
30
二阶传感器的数学模型
d 2Y (t ) dY (t ) a2 a a 0Y (t ) b0 X (t ) 1 2 dt dt 用算子D来表示为: ( D2
0
2
2
0
D 1)Y(t) KX(t )
b0 K--静态灵敏系数, K ; a0
0--无阻尼系统固有频 率, 0 --阻尼比,
2018/9/10
10
分压比电路的计算公式如下:
直滑电位器式传感器的 输出电压 Uo与滑动触点 C的位 移量x成正比:
x Uo Ui L
对圆盘式电位器来说,Uo 与滑动臂的旋转角度成正比:
Uo
2018/9/10
360
Ui
11
2、传感器分类
传感器的种类名目繁多,分类不尽相同。常 用的分类方法有: 1)按被测量分类:可分为位移、力、力矩、转 速、振动、加速度、温度、压力、流量、流速等 传感器。 2 )按测量原理分类:主要基于电磁原理和固体 物理学原理,如基于变电阻原理,相应的有电位 器式、应变式传感器;基于变磁阻的原理,相应 的有电感式、差动变压器式、电涡流式传感器; 根据半导体的有关理论,相应的有半导体力敏、 热敏、光敏等固态传感器。 本教材采用第二种分 类法。
霍尼韦尔商业开关与传感器说明书
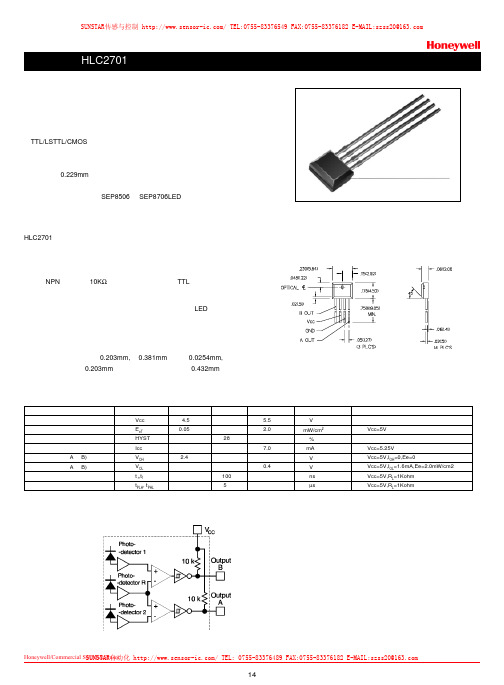
14Honeywell/Commercial Switch&Sensor 霍尼韦尔商业开关与传感器特点侧接收塑料封装TTL/LSTTL/CMOS 兼容反向逻辑输出线性或旋转编码器应用分辨率为0.229mm具有灵敏度温度补偿机械结构上和光谱上与SEP8506和SEP8706LED 相匹配HLC2701专为感测机械运动的速度和方向而设计。
应用包括旋转编码器或线位移编码器。
特别适用于光学鼠标中的编码器。
探测器为单片集成电路包括两个非常靠近的光电二极管、放大器和施密特触发器输出单元。
输出为NPN 集电极带10K Ω上拉电阻,可直接驱动TTL 负载。
探测器中具有灵敏度温度补偿电路,来补偿由于温度变化LED输出功率的漂移。
集成电路封装在一个模压不透光的黑色塑料壳中,可以透射红外能量,而阻挡可见光的透射。
集成电路的敏感区每个宽0.203mm,高0.381mm ,间隔0.0254mm,中心到中心的间隔为0.203mm ,外部边缘到边缘的距离为0.432mm 。
电参数参数供电电压导通辐射阈值迟滞供电电流高电平输出电压(A 和B)低电平输出电压(A 和B)输出上升时间和下降传播延迟,低-高,高-低符号Vcc E eT HYST Icc V OH V OL t r ,t f t PLH , t PHL 最小值 4.5 0.05 2.4典型值 28 100 5最大值 5.5 2.0 7.0 0.4 单位V mW/cm2 % mA V V ns µs 测试条件Vcc=5V Vcc=5.25V Vcc=5V,I OH =0,Ee=0Vcc=5V,I OL =1.6mA,Ee=2.0mW/cm2Vcc=5V,R L =1Kohm Vcc=5V,R L =1Kohm 功能框图外形尺寸图,单位为英寸(毫米)SUNSTAR传感与控制/TEL:0755-********FAX:0755-********E-MAIL:**************SUNSTAR自动化/TEL:0755-********FAX:0755-********E-MAIL:**************公司由传感器销售部、仪表销售部、工程部和总务部四个部组成。
电控柴油机控制系统压力类传感器的检修

电控柴油机控制系统压力类传感器的检修电控柴油机用压力类传感器主要包括:①共轨压力传感器;②增压压力传感器;③大气压力传感器;④机油压力传感器(个别车型用)等。
一、共轨压力传感器CRPS(Common Rail Pressure Sensor)检修压力传感器为共轨柴油机所必须的。
共轨压力是柴油机共轨系统的重要参数,目前,国Ⅲ柴油机共轨系统的共轨压力是实时变化的,喷油量与共轨压力直接相关。
1.共轨压力传感器的工作原理共轨压力传感器安装在共轨上(图4-34),Bosch、Delphi、Denso 共轨系统的共轨压力传感器工作原理基本相同,为压敏电阻式,有3个接线端子(电源、搭铁、信号)。
下面以长城车GW2.8TC型柴油机(Bosch共轨系统)为例分析。
图4-34共轨及共轨压力传感器1-高压共轨;2-共轨压力传感器;3-流量限制器共轨压力传感器由:焊接在压力装置上的集成的传感器部件、装有电子检测回路的印刷电路板、装有电子插入式连线的传感器外壳等组成。
图4-35共轨压力传感器结构示意图及内部电路图燃油通过共轨上的一个小孔流向共轨压力传感器,有压力的燃油通过一个盲孔到达传感器膜片。
一个将压力信号转换为电信号的传感器部件(半导体装置)安装在此膜片上,传感器产生的信号被输入一个用于放大拾取信号并将它送入ECU的检测回路(图4-35所示)。
共轨压力传感器的工作过程如下:当膜片形状变化时,连接于膜片的电阻值也将改变。
系统压力的建立,导致膜片形状变化,改变的电阻值将引起通过5V电桥的电压变化。
电压变化范围为0~70mv(依赖于应用压力),并且被放大电路增幅至0.5~4.5V。
通过设置共轨压力传感器,可以实现对燃油压力的闭环控制。
ECU根据柴油机当前工况下相关传感器输入的信号,计算出的理论所需要的轨压,通过调节进油计量比例阀的开度来实现轨压控制,并依靠共轨压力传感器检测当前实际轨压,将其与理论轨压进行对比修正,实现闭环控制。
cerabar M 压力变送器操作手册 CH

调试: -- 见 4.1 章节
操作: --通过 commuwin Ⅱ --通过通用 HART
ห้องสมุดไป่ตู้通信装置进行
DXR275 见 3.5 章节
调试: -- 见 4.2 章节
软件回顾 软件版本 有效操作手册
1.0
04.99
1.1/1.2
04.02
设备及软件编号 8010 8011/8012
软件修改
有效操作手册的修改
有效用途
安全警示 Cerabar M 是一种压力变送器,根据其种类可用来测量表压和绝对压 力。
安装、调试及操作
易爆危险区
在爆炸危险区中合 格证的应用
根据目前的技术、安全性和 EU 标准,Ceraber M 已设计成能安全地 运行的装置。如果安装不当或用于毫无意义的应用程序中,然而, 有可能产生应用过程中的危险,诸如:由于不正当的安装或校准出 现多余产品。鉴于此,设备必须由已授权并有资质的人员进行安装、 连接、调试、操作及保养。必须阅读并理解使用说明,并按此使用。 仅允许在操作手册中有特别许可证明时,才能对设备进行改造和维 修。 请特别留意标示牌上的技术数据。已在标示牌上指定 MWP(最大 的工作压力)。对于 ANSI 法兰组,这个值引用 20℃(68℉)或 100℉ 的基准温度的值。 ·试验压力(超压极限 OPL)=MWP(标示牌)×1.5 ·高温下的允许压力值,可在下列标准中找出:EN1092-1:2001 表 18; ASME B 16.5a-1998 表 2-2.2 F316;ASME B 16.5a-1998 表 2.3.8 N10276;JIS B2201。
* 11.5…45V 直流 * Ex ia 区域:11.5…30 V 直流 针对反极性保护电路,HF 影响过电压的最大值(参见 TI241F 技术资 料的‘EMC 测试原理’)。 在不终断测量的状态下,通过适当的终端连接片可得到测试信号。
KH 压力传感器技术数据说明书

KHPRESSURE TRANSMITTERU A RMain Features• Ranges: from 4 to 1000 bar• Nominal Output Signal:0...10Vdc (3 wires) / 4...20mA (2 wires)0.5...4.5 v ratiometric• Compact size• Wetted parts: Stainless steel• SIL 2 certified according to IEC/EN 62061:2005KH transmitters are based on film sensing element deposited on stainless steel diaphragm.Thanks to the latest state of the art SMD electronicsand compact all stanless steel construction, these pro-ducts are extremely robust and reliable, with SIL2 certi-fication supplied as standard.KH transmitters are suitable for all industrial applica-tions, specially on hydraulics (presses, pumps, powerpack, fluid power,etc.) with severe conditions usuallywith high level of shock, vibration, pressure and tem-perature peaks, as typical for mobile machines envi-ronment.FS = Full scale1)Incl. Non-Linearity, Hysteresis, Repeatability, Zero-offsetand Span-offset tolerance (acc. to IEC 62828-2)2)The operating pressure range is intended from 0.5 to100% FS3)Time within which the rated performance ia achievedPRESSURE RANGESRANGE(Bar)461016202540601001602002504006001000 Overpressure(Bar)812203240508012020032040050080012001200 Burst pressure(Bar)16244064801001602404006408001000150015001500 MECHANICAL DIMENSIONSELECTRICAL CONNECTION - ConnectorsELECTRICAL CONNECTION - Connection diagramsLOAD DIAGRAMPRESSURE PEAKS PROTECTIONSIL CERTIFICATION (Safety Integrity Level) – FUNCTIONAL SAFETYEXTENSION CABLESGEFRAN spa via Sebina, 7425050 PROVAGLIO D’ISEO (BS) - ITALIA tel. 0309888.1 - fax. 0309839063Internet: DTS_KH_08-2019_ENGGEFRAN spa reserves the right to make any kind of design or functional modification at any moment without prior notice.ORDERING INFORMATION。
传感器与检测技术试卷及答案41新

1. 属于传感器动态特性指标的是(D )A 重复性B 线性度C 灵敏度D 固有频率2 误差分类,下列不属于的是(B )A 系统误差B 绝对误差C 随机误差D 粗大误差3、非线性度是表示校准(B )的程度。
A 、接近真值B 、偏离拟合直线C 、正反行程不重合D 、重复性4、传感器的组成成分中,直接感受被侧物理量的是(B )A 、转换元件B 、敏感元件C 、转换电路D 、放大电路5、传感器的灵敏度高,表示该传感器(C )A 工作频率宽B 线性范围宽C 单位输入量引起的输出量大D 允许输入量大 6 下列不属于按传感器的工作原理进行分类的传感器是(B )A 应变式传感器B 化学型传感器C 压电式传感器D 热电式传感器7 传感器要紧完成两个方面的功能:检测和(D )A 测量B 感知C 信号调节D 转换8 回程误差表明的是在(C )期间输出输入特性曲线不重合的程度A 多次测量B 同次测量C 正反行程D 不同测量9、仪表的精度等级是用仪表的(C )来表示的。
A 相对误差B 绝对误差C 引用误差D 粗大误差二、推断1.在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在改变条件时,按 一定规律变化的误差称为系统误差。
(√)2 系统误差可消除,那样随机误差也可消除。
(×)3 关于具体的测量,周密度高的准确度不一定高,准确度高的周密度不一定高,因此精确度高的准确度不一定高 (×)4 平均值就是真值。
(×)5 在n 次等精度测量中,算术平均值的标准差为单次测量的1/n 。
(×)6.线性度就是非线性误差.(×)7.传感器由被测量,敏感元件,转换元件,信号调理转换电路,输出电源组成.(√)8.传感器的被测量一定就是非电量(×)9.测量不确定度是随机误差与系统误差的综合。
(√)10传感器(或测试仪表)在第一次使用前和长时刻使用后需要进行标定工作,是为了确定传感器静态特性指标和动态特性参数(√)二、简答题:(50分)1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特性就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性?答:传感器的动态特性是指当输入量随时刻变化时传感器的输入—输出特性。
第四章 强度调制型光纤传感器1

4.2 反射式强度调制
反射式强度调制光纤传感器的缺点:
抗干扰能力差。
因为以光强变化来获取被传感参量变化的信息,测量结 果极易受光源、光纤等引起的光强波动以及探测器和后 续电路产生的电子噪声的影响,存在较大测量误差。 研究表明,环境光干扰、光源的功率波动、光纤的特性 变化、被测面的反射率变化等是影响传感器精度和稳定 性的主要因素。
第四章 强度调制型光纤传感器
4.2 反射式强度调制
光纤倾斜式改进型:
发射和接收光纤的端部各耦合一个渐变折射率光纤(GRIN ) 制成的透镜,该透镜可使光源发出的光会聚成一平行光束 并以入射角θ照射到试件上。接收GRIN透镜放置在镜面反 射的方向上。 若把试件置于某一特定位置
DM,接收光纤能接收到所
第四章 强度调制型光纤传感器
4.2 反射式强度调制
光纤截面的不同排列方式示意图
增大发射亮度和接收光通量
第四章 强度调制型光纤传感器
4.2 反射式强度调制
传统反射式强度调制光纤传感器的缺点:
绝大数含有传感信息的调制光损耗在光纤传感头 和反射面之间,仅有很小一部分调制光被接受光 纤接受并传输至探测器; 灵敏度较低,存在较大测量死区,而且过小的光 纤间距也不易调整,限制了光纤传感器的应用。
MicroCal
用户手册MicroCal™型高精度模块化压力校准仪800.257.3872目录1.0 安全说明 (4)2.0 介绍 (5)3.0 标准设备分解图 (6)4.0 工作特点4.1 MICROCAL (7)4.2 便携性 (7)4.3 校准仪界面概览 (8)5.0. 校准仪设置5.1 用户界面面板 (10)5.2 电池充电 (10)5.3 更换电池 (11)5.4 基准传感器安装 (12)5.5 准备开始 (13)6.0 MICROCAL界面6.1 应用定义 (14)6.2 REAL TIME(实时):通用 (14)6.21 REAL TIME(实时):指针压力表 (15)6.22 REAL TIME(实时):压力开关 (15)6.23 REAL TIME(实时):专家系统 (15)6.3 RUN TEST(运行测试):通用 (16)6.31 RUN TEST(运行测试):指针压力表 (17)6.32 RUN TEST(运行测试):压力开关 (17)6.33 RUN TEST(运行测试):抖动控制页面 (18)6.34 RUN TEST(运行测试):专家系统 (19)6.4 TEST SETUP(测试设置):通用 (20)6.41 TEST SETUP(测试设置):指针压力表 (21)6.42 TEST SETUP(测试设置):压力开关 (21)6.5 UUT(被测传感器)设置:通用 (22)6.51 UUT类型:指针压力表 (25)6.52 UUT类型:压力开关 (25)6.53 UUT设置:专家系统 (25)6.6 系统 (26)7.0 被测传感器连接 (30)8.0 校准和测试传感器/变送器 (31)9.0 MICROCAL MANAGER软件操作界面9.1 MicroCal和PC连接设置 (33)9.2 图形用户界面设置 (34)9.3 测试结果数据 (38)10.0 MICROCAL技术规格10.1 测量不确定性 (41)10.2 控制能力 (41)10.3 通用参数配置 (41)11.0 其他信息11.1 术语表 (42)11.2 压力传感器技术规格说明 (43)12.0 备件和配件 (47)13.0 产品维修 (48)1.0 安全说明请按手册指示使用校准仪,否则可能导致仪器损坏。
04电感式传感器
三、电感式传感器的应用
2.力和压力测量
图2-41是差动变压器式力传感器。当力作用于传感器时,弹 性元件产生变形,从而导致衔铁相对线圈移动。线圈电感的 变化通过测最电路转换为输出电压,其大小反映了受力的大 小。
三、电感式传感器的应用
2.力和压力测量
差动变压器与膜片、膜盒和弹簧管等相结合,可以组成压力 传感器。图2-42是微压力传感器结构示意图。在无压力作用 时,膜盒在初始状态,与膜盒连接的衔铁位于差动变压器线 圈的中心。当压力输入膜盒后,膜盒的自由端产生位移并带 动衔铁移动,差动变压器产生一正比于压力的输出电压
二、差动变压器式传感器
1.工作原理
零点残余电动势的存在,使得传感器的输出特性在零点附近 不灵敏,给测量带来误差,此值的大小是衡量差动变压器性 能好坏的重要指标
二、差动变压器式传感器
1.工作原理
为了减小零点残余电动势可采取以下方法: ①尽可能保证传感器几何尺寸、线圈电气参数和磁路的对称。 磁性材料要经过处理,消除内部的残余应力,使其性能均匀 稳定。 ②选用合适的测量电路,如采用相敏整流电路,既可判别衔 铁移动方向又可改善输出特性,减小零点残余电动势。
它的主要缺点是响应较慢,不宜于快速动态测量,而且传 感器的分辨率与测量范围有关,测量范嗣大.分辨率低:反之 则高。
第三节、电感式传感器
电感式传感器种类很多,一般分为自感式和互感式两大类。 人们习惯上讲电感式传感器通常指自感式传感器,而互感式传 感器由于是利用变压器原理,又往往做成差动式,故常称为差 动变压器式传感器。因为电涡流也是一种电磁感应现象,所以 也将电涡流传感器列入本节。
三、电感式传感器的应用
3.振动和加速度的测量
图2-43为测量振动与加速度的电感传感器结构图,衔铁受振 动和加速度的作用,使弹簧受力变形,与弹簧连接的衔铁的 位移大小反映了振动的幅度和频率以及加速度的大小电压
索尔SOR压力传感器选型资料-资料类

索尔SOR压力传感器选型资料-资料类关键信息项1、压力传感器型号2、测量范围3、精度等级4、输出信号类型5、工作温度范围6、防护等级7、安装方式8、响应时间9、供电电压11 压力传感器型号详细列举索尔 SOR 压力传感器的各种型号,包括但不限于标准型号和特殊定制型号。
对每个型号的特点和适用场景进行简要说明。
111 测量范围明确不同型号压力传感器所能测量的压力范围,例如从最小压力值到最大压力值。
同时说明在超出测量范围时可能出现的情况以及对传感器的潜在损害。
112 精度等级阐述各型号压力传感器的精度等级,如高精度、中精度和低精度等。
解释精度等级对测量结果准确性的影响,并提供相关的精度误差范围数据。
12 输出信号类型介绍索尔 SOR 压力传感器可提供的输出信号类型,如模拟信号(如电压、电流)和数字信号(如 RS485、CAN 总线等)。
说明不同输出信号类型的优缺点和适用的系统接口要求。
121 工作温度范围给出压力传感器正常工作的温度范围,包括最低工作温度和最高工作温度。
强调在极端温度条件下使用时需要采取的防护措施或可能对传感器性能产生的影响。
122 防护等级描述传感器的防护等级,如防水、防尘等方面的能力。
解释防护等级的含义和其在不同恶劣环境中的适用性。
13 安装方式详细说明索尔 SOR 压力传感器的安装方式,如螺纹连接、法兰连接等。
提供安装所需的工具和注意事项,以确保正确安装和稳定运行。
131 响应时间注明压力传感器的响应时间,即从压力变化到输出信号相应变化的时间间隔。
说明响应时间在不同应用场景中的重要性和对系统控制的影响。
132 供电电压明确各型号压力传感器所需的供电电压范围,包括直流和交流电压。
提醒用户在供电时要遵循规定的电压要求,以避免损坏传感器。
2、选型指南基于上述关键信息项,为用户提供选型的指导原则和步骤。
例如,根据测量压力的大小、精度要求、工作环境温度、输出信号需求等因素,如何选择合适的索尔 SOR 压力传感器型号。
压力温度流量液位控制系统基础知识培训

多 变 量 DP, P 与 T测量
动态补偿的质 量流量测量
规模可变设计平台 2倍的性能改善 2倍的稳定性提高 一体化的全面测量
解决方案
1969
电容传感器
双隔离室 标准组件化的组装
1980
共平面
1990
1996
工 业 首 创技术
多变量
一体化的 阀组
智能 低功耗
5年 稳定性
2001
差压质量流量
模拟 “P/I”
Competition
智能 “性能”
技术引领者
工厂管控网
35
“下一价值曲线”
仪表基础知识培训议程
1.压力知识培训 2.温度知识培训 3.流量知识培训 4. 液位知识培训 5.控制理论知识培训
36
Emerson Process Management Overview Date: 20-Apr-01, Slide 36
电容式压力传感器 光纤式压力传感器 力矩平衡式压力变送器
2. 波纹管
优点:灵敏高,可测较低压力
缺点:迟滞误差较大,精度一般只有1.5级
14
1999 ARC Unit Study
电子压力变送器
电子变送器 将 输 入 压 力 转 换 成 为 数 字 的 或 电 信 号 。 电子变送器有两个基本的部分:
23
2. 仪表精度的选择
压力检测仪表的精度主要根据生产允许的最大误差来 确定,即要求实际被测压力允许的最大绝对误差应小 于仪表的基本误差。
3. 仪表类型的选择
从被测介质压力大小来考虑 被测介质的性质 对仪表输出信号的要求 使用的环境
24
压力仪表的校验
校验就是将被校验压力表和标准压力表通以相同压力,比较它们的指示数值,如果被 校表对于标准表的读数误差,不大于被校表规定的最大准许绝对误差时,则认为被校 表合格。
压力传感器的高精度数据采集
压力传感器的高精度数据采集压力传感器的高精度数据采集一、引言在石油、化工、冶金、电力、纺织、轻工、水利等工业及科研领域中,都必须进行相关的压力检测与分析。
通常压力值的变化速度较缓慢,但在测量压力值并把它由非电量转变成电量这一过程中,要求精度非常高,本文介绍了一种通用的高精度压力数据采集系统。
系统的压力传感器选用Motorola公司的高精度X型硅压力传感器MPX2100,转换精度高、灵敏度高,具有极好的线性度,在高性能单片机AT89S52的控制下,放大调理后的模拟电量通过高精度、高性能芯片ICL7135进行A/D转换,可以保证系统具有很高的数据采集精度和很强的抗干扰能力,使用寿命长。
系统采用液晶显示及PS/2键盘接口,实现了良好的人机交换。
PLD技术的应用,节省了硬件电路的开销。
二、系统的硬件组成及工作原理高精度压力数据采集系统框图。
压力传感器输出的模拟信号被放大调理后经模/数转换模块转换为数字量,传送给单片机,经过标定、运算及零点补偿等处理,在液晶显示模块上显示出来,同时可经串行接口传送到上位机,实现良好的人机交换,键盘提供人机交互的手段。
1、压力数据采集及信号调理电路压力传感器是一种将压力转换成电流/电压的器件,可用于测量压力、位移等物理量。
压力传感器的种类很多,其中硅半导体传感器因其体积小、重量轻、成本低、性能好、易集成等优点得到广泛的应用。
硅压阻式传感器属于其中的一种,它是在硅片上用扩散或离子注入法形成四个阻值相等的电阻条,并将它们接成一个惠斯登电桥。
当没有外加压力时,电桥处于平衡状态,电桥输出为零。
当有外加压力时,电桥失去平衡而产生输出电压,该电压大小与压力有关,通过检测电压,即可得到相应的压力值。
但这种传感器由于四个桥臂电阻不完全匹配而引起测量误差,零点偏移较大,不易调整。
Motorola公司生产的X型硅压力传感器则可以克服上述缺点。
,与惠斯登电桥不同,Motorola专利技术采用单个X型电阻元件,而不是电桥结构,其压敏电阻元件呈X型,因而称为X型压力传感器。
水凝胶声子晶体用于压力传感器的原理综述

水凝胶声子晶体用于压力传感器的原理综述摘要:近年来,水凝胶因为其与生物组织相似的机械性质和化学性质,而越来越广泛地应用于表皮可穿戴设备和可植入设备。
水凝胶声子晶体是具有特殊物理结构的超材料,通过设计可以使其具有所需的声学特性。
因此,结合超声技术,水凝胶声子晶体可以作为传感器,应用于压力的监测。
当水凝胶声子晶体受到压力发生形变时,其特征频率、反射系数等声学特性就会发生变化,如果我们能通过超声监测到水凝胶声子晶体的特征频率、反射系数或者透射系数等声学特性的变化,我们就可以用水凝胶声子晶体作为压力传感器。
本文综述了水凝胶声子晶体用于压力传感器的原理。
包括水凝胶声子晶体的声学特性,目前已有的可植入传感器的材料和结构,以及超声相控阵的原理和应用。
关键词:水凝胶;声子晶体;超声;可植入传感器1 引言水凝胶材料具有高含水量、机械柔性、生物相溶性、生物功能性等特点,与生物组织相似的机械性质和化学性质。
因此,水凝胶是用于人机交互的良好材料,目前已经被广泛地应用于脑机接口、神经修复术、临床设备和医疗植入物等领域,主要用于制造表皮可穿戴设备和可植入设备[1]。
水凝胶声子晶体用于压力监测的理论基础是声子晶体的声学特性,涉及到的技术包括聚乙烯醇(PVA)水凝胶的合成、羧甲基纤维素(CMC)水凝胶的合成,使用的监测方法是超声监测。
本文综述了水凝胶声子晶体用于压力监测的原理,包括水凝胶声子晶体的声学特性、可植入传感器的材料和结构以及超声相控阵的原理和应用。
2水凝胶声子晶体的声学特性2.1在空气-水-固体上具有宽带频率可调谐声学特性的水凝胶麻省理工大学赵选贺教授团队研究了一种在空气-水-固体上具有宽带频率可调谐声学特性的水凝胶复合材料[3]。
赵选贺教授团队使用了195 mm × 205 mm × 15.5 mm(长×宽×厚)和280 mm × 110 mm × 6 mm(长×宽×厚)的两种水凝胶片,采用等间距平行通道的模式,分别将31个圆形通道和41个方形通道周期性排列嵌入在厚度方向的中间平面上。
动车组机械师考试:CRH1型动车组机械师必看考点五

动车组机械师考试:CRH1型动车组机械师必看考点五1、单选CRH1A型动车组的辅助压缩机设在()车。
A.McB.TpC.TbD.M正确答案:B2、单选CRH1A型动车组对CRH1A型动车组进行活车回送时,以(江南博哥)下说法正确的是()。
A.救援车对回送车的制动控制,仅能控制紧急制动的施加,常用制动无法施加B.救援车对回送车的制动控制,仅能控制常用制动的施加,紧急制动无法施加C.救援车对回送车的制动控制,不仅能控制常用制动的施加,同时也能控制紧急制动的施加D.救援车对回送车的制动控制,不能控制常用制动的施加,同时不能控制紧急制动的施加正确答案:C3、单选CRH1A型动车组的车体位()焊接结构。
A.不锈钢B.铝合金C.不锈钢和铝合金D.不锈钢和铸钢正确答案:A4、单选CRH1A型动车组空气干燥器由两个干燥塔组成,空气干燥与干燥剂的再生在两个干燥塔内交替进行,每()分钟交换一次。
A.1B.2C.3D.5正确答案:B5、单选CRH1A型动车组齿轮箱外部操作温度范围为()。
A.-40~40℃B.-45~45℃C.-40~45℃D.-45~40℃正确答案:A6、单选CRH1E型动车组高压侧总共有()个线路断路器(LCBB)。
A.3B.4C.6D.10正确答案:B7、单选CRH1A型动车组IDU的系统--供风界面上,主压缩机图标显示绿色边框,表示()。
A.压缩机工作B.压缩机关闭C.压缩机切断D.状态不明正确答案:B8、单选CRH1A型动车组“手动过分相”按钮(黄色)(),表示手动过分相被选中。
A.亮B.闪烁C.不亮D.不变正确答案:A9、单选当CRH1A型动车组受电弓碳滑板受到冲击导致压力下降,则()会产生一个电信号传送给控制计算机。
A.压力开关B.微动开关C.压力表D.滑板检测装置正确答案:A10、单选CRH1A型动车组列车诊断系统中央控制单元的英文缩写是()。
A.TCCCUB.TDSCCUC.ATPCCUD.AXSCCU正确答案:B11、单选CRH1A型动车组的边门置于本地控制操作后,正确的说法是()。