真空镀膜机电气控制系统大学生大学生大学 大学毕业设计
真空镀膜机控制系统的设计

图3:自动控制系统模块的功能仿真zoom out(2)
由于此程序较长,具体的程序设计见附录。
3.2
参数设定是在镀膜机工艺运行以前完成的,参数的调用时在工序流程模块中的第十个状态(state10)完成的,如下图4所示的设计原理框图,它由操作者根据镀膜工艺的要求事先设定,再通过设置数据,包括镀膜的时间、氩气流量、氮气流量、靶电流大小、靶的选取模式,在运行时调用这些参数进行工艺设计。
y(4)=>cs5); --con1的映射
u3: sram1 port map(cs=>cs1,wr=>wrt,adr=>ca,din=>dint,
dout=>douts1,clk=>clkj); --sram1(时间)的映射
u4: sram1 port map(cs=>cs2,wr=>wrt,adr=>ca,din=>dint,
con2完成的是对工艺运行层数的控制,其中包括镀膜自动运行层数(“b”)和设置参数层数(“a”)的控制,“s”是对“a”和“b”的选择,当s=“0”时,选择的是设置参数层数(“a”),当s=”1”时,选择镀膜自动运行层数(“b”);“s”是由控制运行时间的SRAM和decoder所确定的。
1)con2的VHDL描述
entity con2 is
port(a,b:in std_logic_vector(3 downto 0);
s:in std_logic;
c:out std_logic_vector(3 downto 0));
end con2;
architecture bhv of con2 is
begin
真空镀膜机的详细结构

真空镀膜机的详细结构
真空镀膜机是一种用于在物体表面镀膜的设备,其主要结构包括以下几个部分:
1.真空室:真空室是镀膜机的主体部分,通常采用不锈钢或铝合金材料制成。
它具有密封性能,能够创建高真空环境,以确保镀膜过程的稳定性。
2.真空系统:真空系统用于将真空室内的气体抽出,创建真空环境。
它通常包括真空泵、阀门、管道等设备。
真空泵可根据具体需要选择离心泵、分子泵等。
3.镀膜源:镀膜源用于产生镀膜材料蒸汽或离子束,以便将其沉积在物体表面。
常见的镀膜源包括电阻炉、电子束蒸发器、磁控溅射器等。
4.衬底架:衬底架是用来固定待镀膜物体的支撑结构,通常由不锈钢制成。
在镀膜过程中,衬底架可通过旋转或倾斜等方式使得物体的表面均匀接触镀膜材料。
5.电子控制系统:电子控制系统用于控制镀膜机的工作过程,包括控制真空系统、镀膜源等设备的开关和运行状态,以实现镀膜过程的自动化控制。
6.监测仪器:监测仪器用于实时监测镀膜过程中的关键参数,例如真空度、镀膜材料蒸汽的流量、表面温度等。
这些参数的监测有助于优化镀膜工艺,提高镀膜质量。
7.辅助设备:辅助设备包括气体供应系统、冷却系统、加热系
统等。
气体供应系统用于提供镀膜过程中所需的气体,例如惰性气体或反应气体。
冷却系统用于冷却真空室和镀膜源等部件,以防止过热。
加热系统用于加热衬底或镀膜源,以控制镀膜过程的温度。
以上是真空镀膜机的主要结构,不同型号和应用领域的镀膜机可能在结构和功能上有所差异。
真空镀膜机电气控制系统 毕业答辩
3、真空镀膜机的整体方案设计
3、真空镀膜机的整体方案设计
真空镀膜机主要由镀膜系统、真空系统、卷绕系统、电 控系统及辅助部件构成,简图如上图所示。
1、镀膜系统是用于完成基材镀膜的地方;
2、真空系统主要是为镀膜部分制造一个高真空的环境,为 得到良好的蒸镀效果;
3、电气控制系统主要来控制真空室中机械泵、扩散泵等的 启停、相应阀门的开关量以及相应泵的指示灯和故障告警 等,它是真空镀膜机的一个重要环节;
2、设计任务
本控制系统主控单元采用PLC通过上位机设置对纸张力、电 机速度、蒸发舟的状态和蒸发量等工艺要求参数的控制。实现 以下几个主要功能: 1、PLC能与上位机进行通信,接受上位机参数的设置; 2、进行机械联动及电机转速检测控制; 3、进行张力的自动控制,找出影响张力的物理因素; 4、对蒸发舟的状态检测和控制,也就转化为对镀膜厚度的自 动 控制; 5、具有对变频控制器输入控制。
真空镀膜机的电气控制系统
指导老师:李聪
自动化与电气工程学院 电传1002 黄瑶妹
目录
1
研究背景和意义
2
设计任务
3
系统整体设计方案
4
系统设计具体的方法
5
总结
1、研究的背景和意义
真空镀膜的优点比化学镀膜多的多,主要有: 1、真空镀膜不会损坏薄膜材料; 2、镀制出来的成品寿命比化学镀膜多出好几倍。 3、可以镀制各类金属或者非金属的材质,种类丰富; 4、镀膜过程都是在真空环境下,出现较少的杂质,环境污染小; 5、符合当代绿色发展的要求。
名称 型号 功率
机械泵1 2X-70A 5.5KW
机械泵2 2X-70A 5.5KW
罗茨泵 ZJP-600
7.5KW
基于PLC的真空镀膜机控制系统改造

基于PLC的真空镀膜机控制系统改造摘要:为克服传统的化学气相镀膜机电气控制缺点,开发了一套基于可编程控制器的化学气相沉积镀膜机控制系统。
描述了该镀膜机控制系统的硬件结构和软件功能。
对气体流量、基片温度及开关量的控制效果进行了大量的实验研究。
结果表明:基片温度控制精度达到±1℃、工作(反应)气体的流量控制精度达到10ml、可以进行精确的开关量控制。
应用表明:该控制系统可以实时监控并保证镀膜机的可靠运行。
关键词:化学气相沉积镀膜机温度气体流量控制精度1、前言低温等离子体广泛应用于镀膜、半导体刻蚀等新材料制造领域。
其中射频放电电容耦合等离子体(ccp)是射频等离子体的重要方式[1]。
在射频电源作用下,平行板电极间的气体放电激发等离子体,等离子体在电磁场的作用下沉积在基片上形成薄膜。
本文研究利用射频等离子体进行等离子体增强化学气相沉积(pecvd)制备(类)金刚石薄膜的工艺过程[2]。
对原有的电气控制系统进行了改造,开发了工业控制计算机的控制系统,达到了对数据实时存储、显示和分析目的。
2、工艺简介rf-500型cvd(化学气相沉积)镀膜机是根据射频放电电容偶合方式产生等离子体的设备,利用它可以进行化学气相沉积镀膜,其射频电源频率为13.56mhz。
采用单室平行板电极电容耦合方式。
目前该镀膜机可用于纳米级功能薄膜、类金刚石硬质膜、光学薄膜的生产。
rf-500型cvd镀膜机结包括rf-500型cvd镀膜机的真空室、气体入口、射频电极、等离子体、朗缪尔探针、基片架、基片加热丝、热电偶温度传感器、为基片、为放气口。
3、控制系统的组成为了深入研究薄膜的形成机理,精确控制各种物理量以及便于对数据进一步分析,开发了rf-500型cvd镀膜机计算机控制系统。
目的是实现该镀膜机镀膜过程的实时监控,并对数据进行存储和显示,提高可靠性和抗干扰性,使工作人员在友好的人机交互环境下,完成对现场设备的管理,以简化操作,提高效率。
本科毕业论文-真空镀膜机电气控制系统设计
真空镀膜机电气控制系统设计摘要本文所研究的真空镀膜机是一种蒸发式卷绕系统的镀膜机,主要应用于PET、OPP、BOPP等塑料薄膜上蒸镀金属膜,也可应用于生产镀铝、镀锌铝或镀银锌铝电容膜。
其总体结构主要由真空系统、卷绕系统、蒸镀系统及电控系统组成,通过PLC来实现对真空系统的各种泵、阀门等开关量的控制,通过三菱触摸屏实现后台管理、各种工艺参数的设定及控制功能,自动化程度较高,有利于生产效率的提高。
该电气控制系统主控单元是采用三菱PLC的FX系列的通过三菱触摸屏设置对纸张力、电机速度、蒸发舟的状态和蒸发量等工艺要求参数的控制,同时具有故障报警、保护路线的功能,由RS232/485串行接口、A/D转换模块和控制器等实现各种参数的传输、信息处理、检测控制功能。
文中首先对镀膜机的真空系统和整个蒸镀工艺过程进行了分析;并建立了卷绕系统中放卷、收卷的张力控制模型,找出影响张力的相关因素,并采用了模糊自适应整定PID控制算法作为卷绕系统张力控制策略,结果显示比传统的PID 控制效果好,适应性强;同时完成了控制系统软、硬件结构的论证分析和设计,设计过程中采用三菱PLC仿真软件对电气控制系统进行了模拟仿真,并实现上位机与PLC的通讯功能,仿真结果显示,该真空镀膜机自动化程度高,模拟蒸镀效果好,保证了镀膜质量。
关键词:真空镀膜机;可编程控制器;张力控制;人机界面;AutoCAD2007ABSTRACTIn this paper, Vacuum coating machine, which is developed by this paper is an evaporation-type winding coating machine, mainly used in PET, OPP, BOPP and other plastic film evaporated metallic film, also can be used in the production of aluminum, galvanized aluminum or silver plated zinc aluminum capacitor film. The composition of its overall structure is mainly composed of a vacuum system, winding system, evaporation system and electric control system; On the one hand, through the PLC to control pump of the vacuum system ,valve switch and so on, on the other hand, through Mitsubishi touch screen to conduct back-stage management and control and set all kinds of Process parameters, this will improve the degree of automation and Is conducive to the improvement of production efficiency.The electric control system of main control unit is controlled by Mitsubishi FX series, through Mitsubishi touch screen to set and control evaporation process on paper tension, motor speed, evaporation boat required parameters, besides fault alarm, protection route function. By RS232/485 serial interface and A/D conversion module controller to achieve various parameters transmission, information processing, detection and control function.Firstly, the vacuum system for coating machine and the evaporation process are analyzed in this paper; and the winding system of roll and the roll tension control model is established, then finding out the relevant factors that affect tension, and adopt the fuzzy adaptive tuning PID control algorithm as the winding tension control system, the results showed that compared with the traditional PID control effect, the fuzzy adaptive tuning PID control algorithm is better and have strong adaptability; at the same time completing the proof analysis and design of the control system of soft, hardware structure, the design process of electrical control system is simulated by using PLC simulation software and Mitsubishi, realize the communication between host computer and PLC function, the simulation results show that the vacuum coating machine have high degree of automation, simulation evaporation effect is good and ensure the coating quality.Keywords: vacuum coating machine; programmable controller; tension control; man-machine interface; AutoCAD2007目录摘要 (I)ABSTRACT (II)目录.............................................................................................................................. I II 1 前言....................................................................................................................... - 1 -1.1课题研究背景.............................................................................................. - 1 -1.2真空镀膜机的发展趋势.............................................................................. - 1 -1.3研究目的...................................................................................................... - 2 -1.4研究内容...................................................................................................... - 2 -1.4.1电气控制系统.................................................................................... - 2 -1.4.2工艺参数的控制................................................................................ - 3 -2真空镀膜机的系统结构........................................................................................ - 5 -2.1镀膜工艺流程.............................................................................................. - 5 -2.1.1顺序控制............................................................................................ - 6 -2.1.2抽真空装置........................................................................................ - 7 -2.1.3工艺参数的输入与显示.................................................................... - 7 -2.2真空镀膜机电气控制系统方案设计.......................................................... - 8 -2.2.1控制系统整体方案设计.................................................................... - 8 -2.2.2控制系统整体方案论证.................................................................... - 9 -3真空镀膜机的控制系统硬件.............................................................................. - 11 -3.1.可编程控制器PLC简介 .......................................................................... - 11 -3.1.1可编程控制器的定义...................................................................... - 11 -3.1.2可编程控制器的工作原理.............................................................. - 12 -3.1.3可编程控制器的主要特点.............................................................. - 12 -3.2.硬件设计方案与论证................................................................................ - 13 -3.2.1硬件设计的技术要求...................................................................... - 13 -3.2.2 PLC型号选择方案与论证 ............................................................. - 13 -3.2.3 PLC主机选择方案与论证 ............................................................. - 14 -3.2.4模拟量输入/输出的选择方案与论证 ............................................ - 15 -3.2.5 PLC控制单元的设计方案 ............................................................. - 16 -3.2.6 PLC接口电路设计 ......................................................................... - 17 -3.3.触摸屏简介................................................................................................ - 18 -3.3.1触摸屏的技术简介.......................................................................... - 18 -3.3.2触摸屏与PLC的连接 .................................................................... - 18 -3.4卷绕系统设计............................................................................................ - 19 -3.4.1卷绕系统介绍.................................................................................. - 20 -3.4.2收放卷张力控制系统结构.............................................................. - 21 -3.4.3张力控制方法.................................................................................. - 21 -3.4.4张力执行元件.................................................................................. - 22 -3.4.5送丝系统简介.................................................................................. - 23 -4 PLC程序设计 ..................................................................................................... - 25 -4.1.PLC编程思想 ........................................................................................... - 25 -4.1.PLC程序调试 ........................................................................................... - 26 -结论......................................................................................................................... - 28 -参考文献................................................................................................................. - 29 -致谢......................................................................................................................... - 31 -1 前言1.1 课题研究背景我国真空镀膜的设备研究是开始于20世纪50年代,当时我国研制了各种蒸发式真空镀膜设备,满足了光学事业发展的需要,进入上世纪70年代,由于国民经济各种领域的需要,各种真空镀膜设备开始长足的发展。
真空镀膜机的原理和系统
真空镀膜机的原理和系统
哎呀呀,说起真空镀膜机,这可真是个神奇又复杂的东西呢!
我就先给你讲讲它的原理吧!你想想,就好像我们在一个超级大的空房子里,里面没有一点儿空气,这就是真空环境啦。
然后呢,有一些小小的材料颗粒,就像一群调皮的小精灵,它们在这个真空的大房子里飞来飞去。
这时候,我们给它们加上能量,就好像给小精灵们穿上了超级加速的鞋子,让它们飞快地跑起来。
这些带着能量的材料小精灵,就会跑到我们要镀膜的东西上面,一层一层地堆积起来,就像给那个东西穿上了一层漂亮的新衣服,这就是真空镀膜啦!
那真空镀膜机都有啥系统呢?比如说有真空系统,这就像是房子的大门,得把空气都赶出去,保证里面是真空的。
还有蒸发系统,这就像是小精灵们的出发地,它们从这里出发,然后冲向要镀膜的东西。
还有控制系统,这可太重要啦!就像一个超级聪明的大脑,指挥着一切,让每个部分都能好好工作。
你说,这真空镀膜机是不是很神奇?就好像是一个魔法机器,能给各种东西变出漂亮的新外衣!
再比如说,我们平时用的手机屏幕,是不是很光滑很亮呀?这很可能就是真空镀膜机的功劳呢!还有那些漂亮的眼镜片,闪闪发光的首饰,说不定都是经过真空镀膜变得这么迷人的。
我觉得真空镀膜机简直就是现代科技的一个大宝贝,让我们的生活变得更加丰富多彩,难道不是吗?它让那么多东西都变得更加漂亮和实用,真的太厉害啦!这就是我理解的真空镀膜机的原理和系统,你觉得怎么样?。
真空镀膜实验报告

真空镀膜实验报告 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】真空镀膜实验刘明祖物理21指导老师:侯清润实验日期:2015年11月12日【摘要】本实验以氟化镁和硫化锌为靶材,通过真空蒸镀使之发生气化,又促使其在基片上成膜,进而制备高反膜。
实验中我们测定蒸镀时腔体内气压变化,借以探知蒸镀随时间变化的情况;在制备高反膜时,我们测定参考光源的反射信号,借以监控膜厚和控制蒸镀材料的转换。
通过实验,我们考察了真空镀膜技术的机理,得到了含有镀层的基片。
关键词:真空镀膜,高反射膜,蒸镀一引言真空镀膜技术是在光学、磁学、半导体物理学、微电子学、激光技术等领域广泛采用的工业生产技术,其主要理论背景是固体物理的基本理论。
当温度升高时,固体材料中原子的自由能升高,当自由能提高到足以克服晶格束缚时,固体原子成为自由原子离开固体材料。
为了监控膜厚,我们利用高反膜原理,即:光在多层介质界面上发生反射和折射,而折射光相互抵消、反射光相互叠加,导致整体呈现高反射率。
高反膜对每层介质的厚度要求很高,故可用于检测。
二实验实验装置如图1所示。
图1 实验装置高真空镀膜机由高真空镀膜腔,真空系统,提升机构,光学测量系统,电气控制与安全保护系统等部分组成。
实验过程如下(摘自讲义):三实验结果及讨论1. 蒸镀气压随时间的变化情况经过数小时的真空处理后,蒸发腔内气压降至10-3Pa量级。
之后加热蒸发源,首先加热装有氟化镁的钼舟,待气压稳定后,加热装有硫化锌的钼舟。
根据记录的原始数据,做出蒸发腔内气压随时间变化的关系曲线,如图2所示。
图2 蒸发腔气压随时间变化图中上方曲线为硫化锌,下方曲线为氟化镁,纵坐标为腔内气压,单位为10-3Pa,横坐标为时间,单位为min。
由图中可以看到,对于氟化镁,随着加热过程的进行,真空室内的气压显着上升,而增速不断下降,最终趋于稳定;对于硫化锌,这个过程同样存在,但显着平缓。
真空镀膜计划书
真空镀膜计划书1. 项目背景随着科技的不断进步和工业的发展,真空镀膜技术在各个领域中起到了至关重要的作用。
真空镀膜广泛应用于光学薄膜、电子器件、材料表面改性等领域,已成为现代工业中不可或缺的一部分。
为了满足市场需求并提高产品质量,本项目旨在引进真空镀膜设备并建立一套完整的真空镀膜工艺流程。
2. 目标和意义2.1 目标本项目的主要目标是建立一套成熟的真空镀膜工艺流程,通过镀膜技术改善产品的表面性质,增强其功能和附加值。
2.2 意义真空镀膜技术可以为产品提供以下几个重要的改进:•增加耐磨性: 通过在产品表面形成一层保护性薄膜,可以提高产品的抗磨性能,延长产品使用寿命。
•提高光学性能: 在光学器件中,使用反射率高的镀膜可以提高光学器件的透光率和效率。
•改善导电性: 在电子器件中,使用导电性好的镀膜可以提高器件的导电性能和稳定性。
本项目的实施不仅可以提高产品的质量和竞争力,还有助于推动科技进步和工业升级。
3. 计划内容3.1 设备引进本项目计划引进一台先进的真空镀膜设备。
该设备具备高真空、精密控制和多功能的特点,能够满足不同产品的镀膜需求。
3.2 工艺开发在设备引进后,我们将进行一系列的试验和研究,以开发一套适用于不同产品的镀膜工艺流程。
重点包括镀膜材料的选择和比例、真空度的控制、镀膜时间和温度的优化等方面。
通过不断的试验和改进,我们将提供一套高效、稳定和可靠的镀膜工艺。
3.3 工艺验证工艺开发阶段完成后,我们将对开发出的工艺进行验证。
选择代表性的产品进行试镀,并测试镀膜后产品的性能指标。
根据测试结果,不断调整和优化工艺参数,以确保镀膜工艺的稳定性和可靠性。
3.4 运营和推广在工艺验证通过后,我们将正式投入运营,为市场提供真空镀膜服务。
我们将制定一套完整的服务方案,包括产品接受、工艺选择、生产进度跟踪等。
同时,我们将积极推广我们的服务,与客户建立长期合作关系,并不断提升服务质量和用户体验。
4. 预期效果本项目的预期效果主要包括以下几个方面:•提高产品的附加值和市场竞争力。
真空镀膜机方案
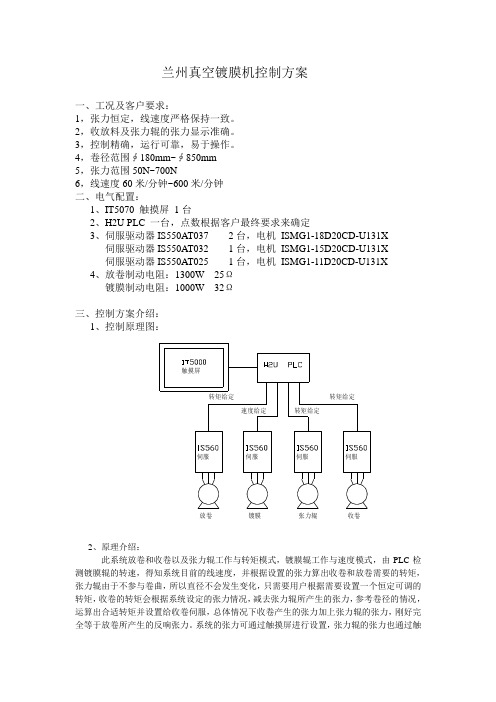
兰州真空镀膜机控制方案一、工况及客户要求:1,张力恒定,线速度严格保持一致。
2,收放料及张力辊的张力显示准确。
3,控制精确,运行可靠,易于操作。
4,卷径范围∮180mm~∮850mm5,张力范围50N~700N6,线速度60米/分钟~600米/分钟二、电气配置:1、IT5070 触摸屏 1台2、H2U PLC 一台,点数根据客户最终要求来确定3、伺服驱动器IS550AT037 2台,电机 ISMG1-18D20CD-U131X 伺服驱动器IS550AT032 1台,电机 ISMG1-15D20CD-U131X 伺服驱动器IS550AT025 1台,电机 ISMG1-11D20CD-U131X4、放卷制动电阻:1300W 25Ω镀膜制动电阻:1000W 32Ω三、控制方案介绍:1、控制原理图: 触摸屏伺服伺服伺服伺服放卷镀膜张力辊收卷转矩给定速度给定转矩给定转矩给定2、原理介绍:此系统放卷和收卷以及张力辊工作与转矩模式,镀膜辊工作与速度模式,由PLC 检测镀膜辊的转速,得知系统目前的线速度,并根据设置的张力算出收卷和放卷需要的转矩,张力辊由于不参与卷曲,所以直径不会发生变化,只需要用户根据需要设置一个恒定可调的转矩,收卷的转矩会根据系统设定的张力情况,减去张力辊所产生的张力,参考卷径的情况,运算出合适转矩并设置给收卷伺服,总体情况下收卷产生的张力加上张力辊的张力,刚好完全等于放卷所产生的反响张力。
系统的张力可通过触摸屏进行设置,张力辊的张力也通过触摸屏设置,然后系统根据这两个值算出收卷和放卷的转矩。
镀膜辊以及收卷和放卷的电机编码器信号分频进入PLC,镀膜辊的编码器信号用于测算当前线速度,收卷和放卷的编码器信号用来分别检测其转动角速度,以便计算卷径。
3、伺服选型规格说明:根据用户提供的张力和卷径变化范围,可以计算出在最大卷径时如果设置最大张力,伺服系统必须提供的转矩为297N.M;同时,要满足线速度要求,要保证在最小卷径情况下达到电机转速为1067转/分钟,故根据这两个条件,以上配置收放卷伺服基本满足。
【精品】真空镀膜机控制系统的设计
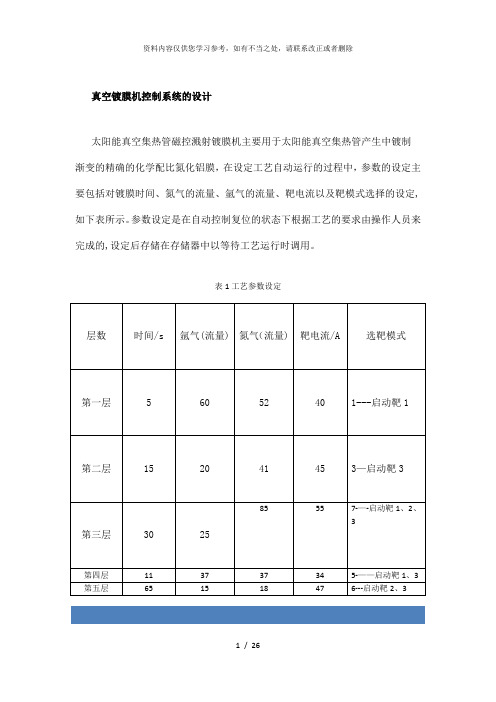
真空镀膜机控制系统的设计太阳能真空集热管磁控溅射镀膜机主要用于太阳能真空集热管产生中镀制渐变的精确的化学配比氮化铝膜,在设定工艺自动运行的过程中,参数的设定主要包括对镀膜时间、氮气的流量、氩气的流量、靶电流以及靶模式选择的设定,如下表所示。
参数设定是在自动控制复位的状态下根据工艺的要求由操作人员来完成的,设定后存储在存储器中以等待工艺运行时调用。
表1工艺参数设定采用手动控制和自动控制相结合的设计思路,设计采用FPGA为核心控制芯片,基于VHDL 语言,这个自动控制系统的设计分成工序流程控制模块、参数设置及调用模块和通信模块三个模块.其中工序流程模块采用有限状态机设计,完成工序流程的控制;参数设置及调用模块主要完成系统所需的参数的设置,需要设置的参数包括镀膜的时间,氮气流量,氩气流量、靶电流大小以及对靶的模式,参数设置及调用模块主要为SRAM的设计;通信模块设计了UART接口,便于与计算机或其他设备之间进行通信。
系统的设计原理框图如下:图1:系统原理框图3。
1工序控制流程模块:用状态机来设计,状态机是数字设计的重要组成部分,是实现高效率,高可靠逻辑控制的重要途径.此模块采用MOORE状态机来描述,其状态机的状态转移图如下图所示,其中包好了17个状态,即包含了整个工序控制的流程,没有标明条件的是一种“无条件”转换。
图2:工序自动运行的状态转移图1。
自动控制模块的功能仿真及分析如图3所示,在复位信号reset变为高电平(reset=’1’)后,开自动运行(atom_hand='1'),接着自动运行工序;开机械泵(machinpump=’1’),开预抽阀(beforeluntvalve='1’),判断真空度1(vacuity=’1'时);关预抽阀(beforeluntvalve=’0’),开前级阀(prevalve=’1’),开高阀(highvalve=’1'),关维持阀(naintainvalve=’0'),关维持泵(maintainpump=’0’),判断真空度2(vacuity2=’1'时);关光闸阀(lightbarriervalve=’1’),开截止阀(cutvalve='1’),判断真空度3(vacuity3='1’时);开氮气控制(nitrogenontrol='1')和氩气控制(argoncontrol=’1’),开工件旋转(workpiecerun='1'),开靶运行(buttrun=’1’),加靶电流(buttcurrent1、2、3),自动运行(crafrun=’1’);运行完毕后,开充气阀(aeratevalve=’1’),开门信号(onoffdoor='1’),取工件,进行下一个工序;图3:自动控制系统模块的功能仿真(1)图3:自动控制系统模块的功能仿真zoomout(2)由于此程序较长,具体的程序设计见附录。
基于PLC和TD400C的建筑玻璃真空镀膜生产线电气系统控制
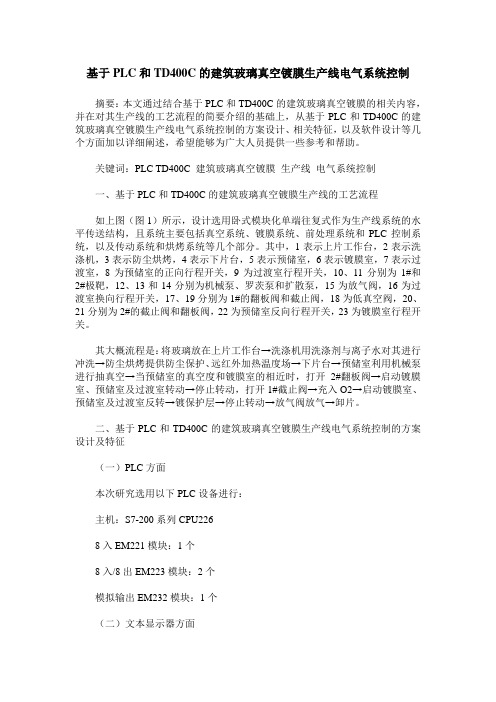
基于PLC和TD400C的建筑玻璃真空镀膜生产线电气系统控制摘要:本文通过结合基于PLC和TD400C的建筑玻璃真空镀膜的相关内容,并在对其生产线的工艺流程的简要介绍的基础上,从基于PLC和TD400C的建筑玻璃真空镀膜生产线电气系统控制的方案设计、相关特征,以及软件设计等几个方面加以详细阐述,希望能够为广大人员提供一些参考和帮助。
关键词:PLC TD400C 建筑玻璃真空镀膜生产线电气系统控制一、基于PLC和TD400C的建筑玻璃真空镀膜生产线的工艺流程如上图(图1)所示,设计选用卧式模块化单端往复式作为生产线系统的水平传送结构,且系统主要包括真空系统、镀膜系统、前处理系统和PLC控制系统,以及传动系统和烘烤系统等几个部分。
其中,1表示上片工作台,2表示洗涤机,3表示防尘烘烤,4表示下片台,5表示预储室,6表示镀膜室,7表示过渡室,8为预储室的正向行程开关,9为过渡室行程开关,10、11分别为1#和2#极靶,12、13和14分别为机械泵、罗茨泵和扩散泵,15为放气阀,16为过渡室换向行程开关,17、19分别为1#的翻板阀和截止阀,18为低真空阀,20、21分别为2#的截止阀和翻板阀,22为预储室反向行程开关,23为镀膜室行程开关。
其大概流程是:将玻璃放在上片工作台→洗涤机用洗涤剂与离子水对其进行冲洗→防尘烘烤提供防尘保护、远红外加热温度场→下片台→预储室利用机械泵进行抽真空→当预储室的真空度和镀膜室的相近时,打开2#翻板阀→启动镀膜室、预储室及过渡室转动→停止转动,打开1#截止阀→充入O2→启动镀膜室、预储室及过渡室反转→镀保护层→停止转动→放气阀放气→卸片。
二、基于PLC和TD400C的建筑玻璃真空镀膜生产线电气系统控制的方案设计及特征(一)PLC方面本次研究选用以下PLC设备进行:主机:S7-200系列CPU2268入EM221模块:1个8入/8出EM223模块:2个模拟输出EM232模块:1个(二)文本显示器方面为了便于将建筑玻璃真空镀膜的生产线参数(包括阀门开启停滞时间、工作气体流量等)进行实时显示或设置,本次研究的人机界面主要选用TD400C文本显示器,用于对S7-200用户程序的所有变量进行查看、监控或是修改。
真空过滤机电气控制系统设计

真空过滤机电气控制系统设计本文旨在介绍真空过滤机电气控制系统设计的背景和目的。
真空过滤机是一种常用于工业生产中的设备,用于过滤液体中的杂质。
机电气控制系统则是对该设备进行电气控制的系统,在保证设备正常运行的同时,提供方便的操作和监控功能。
本文将阐述真空过滤机电气控制系统设计的重要性以及相关设计要点。
The electrical control system design for a vacuum n machine is the focus of this document。
A ___ used in industrial n to filter impuritiesfrom ___'s n。
ensuring its smooth ning。
___。
This document will explain the importance of designing the ___ for the design process.本文档旨在阐述设计真空过滤机电气控制系统的基本要求和功能。
1.性能要求控制系统应能实现真空过滤机的启动、停止、调速等基本功能。
控制系统应具备稳定可靠的性能,以确保真空过滤机的正常运行。
控制系统应具备较高的精确度和可控性,以满足工艺操作的要求。
控制系统应能实现故障检测和报警功能,及时发现并解决潜在问题。
2.功能要求控制系统应包括人机界面,方便操作员进行设定和监控。
控制系统应具备自动化程度高的特点,可实现设定参数的自动调整和自动运行。
控制系统应能实现对真空过滤机各部分的精确控制,以满足不同工艺需求。
控制系统应具备良好的通讯功能,可以与其他设备进行数据交互和集中控制。
3.安全要求控制系统应具备安全保护机制,防止操作人员因误操作而导致的事故发生。
控制系统应具备电源和设备状态监测功能,以确保设备运行时的安全性。
控制系统应能实现紧急停机和故障排除功能,以应对突发情况。
4.可维护性要求控制系统应具备清晰的结构和标准化的接口,方便后期维护和升级。
真空镀膜机自动控制系统应用研究
随着我国经济社会持续推进与发展,绿色经济理念逐步得到重视与应用,这一举措也对镀膜行业提出了新的挑战。
传统真空镀膜技术应用过程中,需要消耗大量电能,并在原料转化效率方面具有一定滞后性,所以对真空镀膜机自动化控制系统优化进行研究,对于促进绿色经济发展以及生产成本降低具有均具有现实意义。
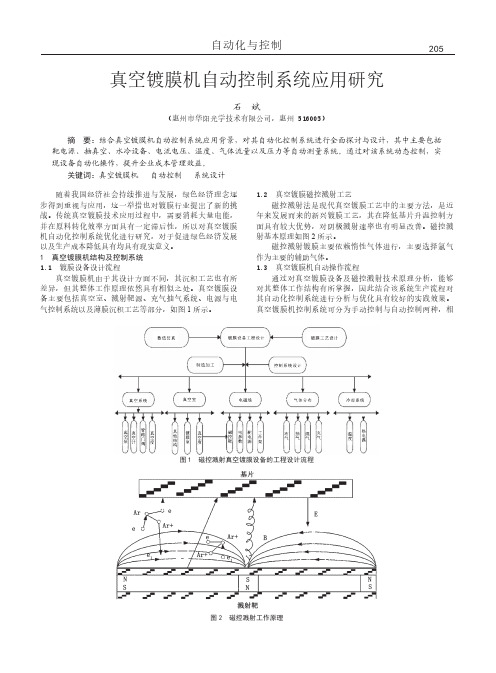
1 真空镀膜机结构及控制系统1.1 镀膜设备设计流程真空镀膜机由于其设计方面不同,其沉积工艺也有所差异,但其整体工作原理依然具有相似之处。
真空镀膜设备主要包括真空室、溅射靶源、充气抽气系统、电源与电气控制系统以及薄膜沉积工艺等部分,如图1所示。
1.2 真空镀膜磁控溅射工艺磁控溅射法是现代真空镀膜工艺中的主要方法,是近年来发展而来的新兴镀膜工艺,其在降低基片升温控制方面具有较大优势,对阴极溅射速率也有明显改善。
磁控溅射基本原理如图2所示。
磁控溅射镀膜主要依赖惰性气体进行,主要选择氩气作为主要的辅助气体。
1.3 真空镀膜机自动操作流程通过对真空镀膜设备及磁控溅射技术原理分析,能够对其整体工作结构有所掌握,因此结合该系统生产流程对其自动化控制系统进行分析与优化具有较好的实践效果。
真空镀膜机控制系统可分为手动控制与自动控制两种,相(惠州市华阳光学技术有限公司,惠州 516005)摘 要:结合真空镀膜机自动控制系统应用背景,对其自动化控制系统进行全面探讨与设计,其中主要包括靶电源、抽真空、水冷设备、电流电压、温度、气体流量以及压力等自动测量系统。
通过对该系统动态控制,实现设备自动化操作,提升企业成本管理效益。
关键词:真空镀膜机 自动控制 系统设计图1 磁控溅射真空镀膜设备的工程设计流程图2 磁控溅射工作原理第三,打开高阀,通过自动调节使分子泵和维持泵的转速稳定,当真空室的压强值为21.01Pa时,打开截止阀门,然后依据初始设定注入氩气,将压强调节到13.01Pa;当电流值达到初始设置值时,工艺开始自动运行,直到达到工艺设定层数,溅射镀膜工艺完毕。
真空卷绕镀膜机控制系统的研究与开发

真空卷绕镀膜机控制系统的研究与开发真空卷绕镀膜机控制系统的研究与开发摘要:随着科学技术的不断发展,真空卷绕镀膜技术在各个行业中得到了广泛的应用。
控制系统作为真空卷绕镀膜机的重要组成部分,对提高设备性能和稳定性起着关键作用。
本文主要针对真空卷绕镀膜机的控制系统展开研究与开发,通过对控制算法、传感器装置和人机界面等方面的优化与改进,实现了真空卷绕镀膜机的精准控制和稳定运行。
一、引言真空卷绕镀膜技术是一种常用的表面处理技术,广泛应用于电子、光电、化工等领域。
真空卷绕镀膜机作为该技术的关键设备之一,主要负责将材料在真空环境下进行卷绕和涂覆,以实现薄膜的均匀覆盖。
在卷绕镀膜过程中,控制系统起着至关重要的作用,它能够对设备的运行状态进行监测和控制,确保卷绕镀膜的质量和效率。
二、卷绕镀膜机的控制系统卷绕镀膜机的控制系统主要由控制器、传感器和执行器组成。
其中,控制器负责对设备的运行参数进行控制和调整,传感器用于实时监测设备的运行状态,而执行器则根据控制信号调整设备的机械运动。
1. 控制算法在真空卷绕镀膜机的控制系统中,控制算法的设计对于设备的性能和稳定性具有重要意义。
常用的控制算法有PID控制算法、模糊控制算法和神经网络控制算法等。
针对卷绕镀膜机的特点,我们可以结合控制对象的数学模型,选择合适的控制算法,通过调整控制参数,实现对设备动态过程的精确控制。
2. 传感器装置传感器装置是卷绕镀膜机控制系统中不可缺少的部分,它主要用于感知和采集关键参数的变化情况。
常用的传感器包括温度传感器、压力传感器、涂层厚度传感器等。
通过这些传感器的实时监测,可以及时发现设备运行中的异常情况,并及时采取相应的控制措施,确保卷绕镀膜的质量。
3. 人机界面人机界面是卷绕镀膜机控制系统中的重要环节,它负责与操作人员进行交互,使得操作人员可以方便地监控设备运行状态和进行相应的操作。
合理设计人机界面,使其具备直观、友好的特点,可以提高设备的操作效率和控制精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计题目真空镀膜机电气控制系统摘要本文所研究的真空镀膜机是一种蒸发式卷绕系统的镀膜机,主要应用于PET、OPP、BOPP等塑料薄膜上蒸镀金属膜,也可应用于生产镀铝、镀锌铝或镀银锌铝电容膜。
其总体结构主要由真空系统、卷绕系统、蒸镀系统及电控系统组成,通过PLC来实现对真空系统的各种泵、阀门等开关量的控制,通过三菱触摸屏实现后台管理、各种工艺参数的设定及控制功能,自动化程度较高,有利于生产效率的提高。
该电气控制系统主控单元是采用三菱PLC的FX系列的通过三菱触摸屏设置对纸张力、电机速度、蒸发舟的状态和蒸发量等工艺要求参数的控制,同时具有故障报警、保护路线的功能,由RS232/485串行接口、A/D转换模块和控制器等实现各种参数的传输、信息处理、检测控制功能。
文中首先对镀膜机的真空系统和整个蒸镀工艺过程进行了分析;并建立了卷绕系统中放卷、收卷的张力控制模型,找出影响张力的相关因素,并采用了模糊自适应整定PID控制算法作为卷绕系统张力控制策略,结果显示比传统的PID 控制效果好,适应性强;同时完成了控制系统软、硬件结构的论证分析和设计,设计过程中采用三菱PLC仿真软件对电气控制系统进行了模拟仿真,并实现上位机与PLC的通讯功能,仿真结果显示,该真空镀膜机自动化程度高,模拟蒸镀效果好,保证了镀膜质量。
关键词:真空镀膜机;可编程控制器;张力控制;人机界面;AutoCAD2007ABSTRACTIn this paper, Vacuum coating machine, which is developed by this paper is an evaporation-type winding coating machine, mainly used in PET, OPP, BOPP and other plastic film evaporated metallic film, also can be used in the production of aluminum, galvanized aluminum or silver plated zinc aluminum capacitor film. The composition of its overall structure is mainly composed of a vacuum system, winding system, evaporation system and electric control system; On the one hand, through the PLC to control pump of the vacuum system ,valve switch and so on, on the other hand, through Mitsubishi touch screen to conduct back-stage management and control and set all kinds of Process parameters, this will improve the degree of automation and Is conducive to the improvement of production efficiency.The electric control system of main control unit is controlled by Mitsubishi FX series, through Mitsubishi touch screen to set and control evaporation process on paper tension, motor speed, evaporation boat required parameters, besides fault alarm, protection route function. By RS232/485 serial interface and A/D conversion module controller to achieve various parameters transmission, information processing, detection and control function.Firstly, the vacuum system for coating machine and the evaporation process are analyzed in this paper; and the winding system of roll and the roll tension control model is established, then finding out the relevant factors that affect tension, and adopt the fuzzy adaptive tuning PID control algorithm as the winding tension control system, the results showed that compared with the traditional PID control effect, the fuzzy adaptive tuning PID control algorithm is better and have strong adaptability; at the same time completing the proof analysis and design of the control system of soft, hardware structure, the design process of electrical control system is simulated by using PLC simulation software and Mitsubishi, realize the communication betweenhost computer and PLC function, the simulation results show that the vacuum coating machine have high degree of automation, simulation evaporation effect is good and ensure the coating quality.Keywords: vacuum coating machine; programmable controller; tension control; man-machine interface; AutoCAD2007目录摘要 (I)ABSTRACT (II)目录.............................................................................................................................. I V 1 前言....................................................................................................................... - 1 -1.1课题研究背景.............................................................................................. - 1 -1.2真空镀膜机的发展趋势.............................................................................. - 1 -1.3研究目的...................................................................................................... - 2 -1.4研究内容...................................................................................................... - 2 -1.4.1电气控制系统.................................................................................... - 2 -1.4.2工艺参数的控制................................................................................ - 3 -2真空镀膜机的系统结构........................................................................................ - 5 -2.1镀膜工艺流程.............................................................................................. - 5 -2.1.1顺序控制............................................................................................ - 6 -2.1.2抽真空装置........................................................................................ - 7 -2.1.3工艺参数的输入与显示.................................................................... - 7 -2.2真空镀膜机电气控制系统方案设计.......................................................... - 8 -2.2.1控制系统整体方案设计.................................................................... - 8 -2.2.2控制系统整体方案论证.................................................................... - 9 -3真空镀膜机的控制系统硬件.............................................................................. - 11 -3.1.可编程控制器PLC简介 .......................................................................... - 11 -3.1.1可编程控制器的定义...................................................................... - 11 -3.1.2可编程控制器的工作原理.............................................................. - 12 -3.1.3可编程控制器的主要特点.............................................................. - 12 -3.2.硬件设计方案与论证................................................................................ - 13 -3.2.1硬件设计的技术要求...................................................................... - 13 -3.2.2 PLC型号选择方案与论证 ............................................................. - 13 -3.2.3 PLC主机选择方案与论证 ............................................................. - 14 -3.2.4模拟量输入/输出的选择方案与论证 ............................................ - 15 -3.2.5 PLC控制单元的设计方案 ............................................................. - 16 -3.2.6 PLC接口电路设计 ......................................................................... - 17 -3.3.触摸屏简介................................................................................................ - 18 -3.3.1触摸屏的技术简介.......................................................................... - 18 -3.3.2触摸屏与PLC的连接 .................................................................... - 18 -3.4卷绕系统设计............................................................................................ - 19 -3.4.1卷绕系统介绍.................................................................................. - 20 -3.4.2收放卷张力控制系统结构.............................................................. - 21 -3.4.3张力控制方法.................................................................................. - 21 -3.4.4张力执行元件.................................................................................. - 22 -3.4.5送丝系统简介.................................................................................. - 23 -4 PLC程序设计 ..................................................................................................... - 25 -4.1.PLC编程思想 ........................................................................................... - 25 -4.1.PLC程序调试 ........................................................................................... - 26 -结论......................................................................................................................... - 28 -参考文献................................................................................................................. - 29 -致谢......................................................................................................................... - 31 -1 前言1.1 课题研究背景我国真空镀膜的设备研究是开始于20世纪50年代,当时我国研制了各种蒸发式真空镀膜设备,满足了光学事业发展的需要,进入上世纪70年代,由于国民经济各种领域的需要,各种真空镀膜设备开始长足的发展。