振动单位换算表
振动单位换算表
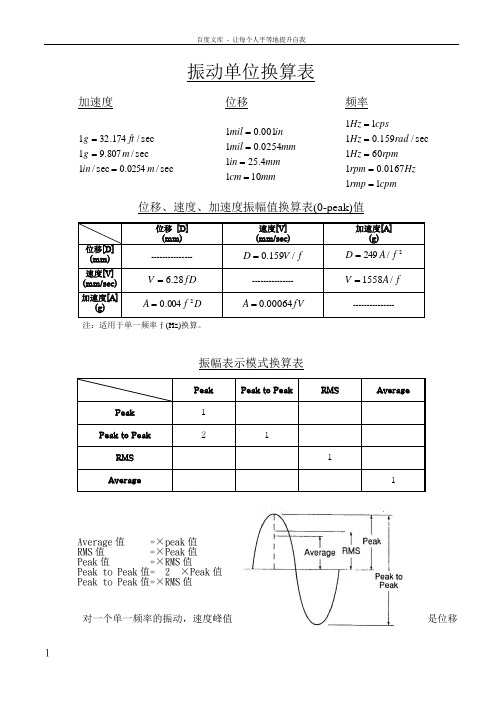
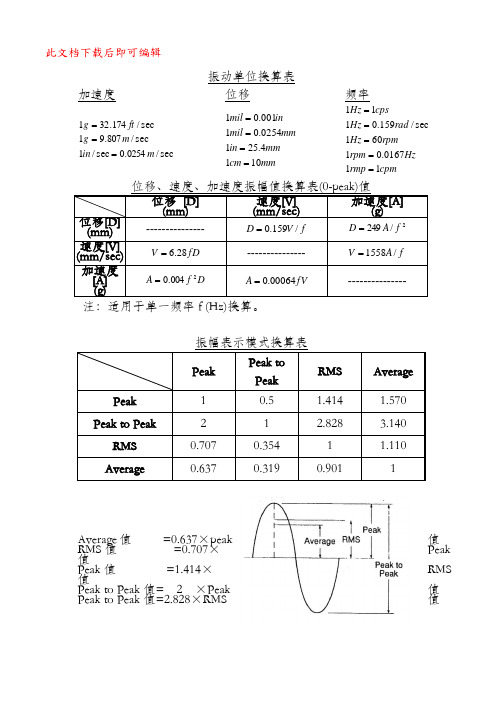
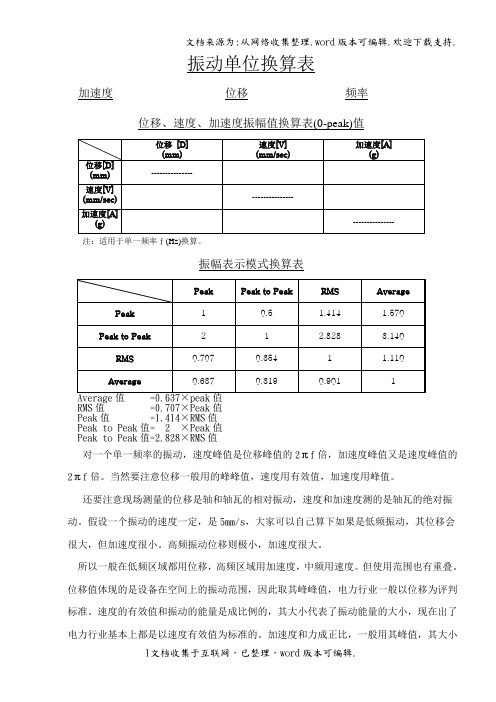
振动单位换算表加速度位移频率sec/0254.0sec /1sec /807.91sec /174.321m in m g ft g ===mmcm mm in mm mil inmil 1014.2510254.01001.01==== cpmrmp Hz rpm rpm Hz rad Hz cpsHz 110167.01601sec/159.0111=====位移、速度、加速度振幅值换算表(0-peak)值位移 [D] (mm) 速度[V] (mm/sec)加速度[A](g)位移[D] (mm) ---------------fV D /159.0=2/249f A D =速度[V] (mm/sec) fD V 28.6= ---------------f A V /1558=加速度[A](g)D f A 2004.0=fV A 00064.0=---------------注:适用于单一频率f (Hz)换算。
振幅表示模式换算表Peak Peak to PeakRMS AveragePeak 1 Peak to Peak2 1 RMS 1 Average1Average 值 =×peak 值 RMS 值 =×Peak 值 Peak 值 =×RMS 值Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=×RMS 值对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
振动一般可以用以下三个单位表示

振动一般可以用以下三个单位表示:mm、mm/s、mm/(s^2)。
mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定; mm/(s^2)振动加速度:一般用于高速转动机械的振动评定。
现在的测振仪一般都采用压电式的,结构形式大致有二种:① 压缩式;② 剪切式,其原理是利用石英晶体和人工极化陶瓷(PZT)的压电效应设计而成。
当石英晶体或人工极化陶瓷受到机械应力作用时,其表面就产生电荷,所形成的电荷密度的大小与所施加的机械应力的大小成严格的线性关系。
同时,所受的机械应力在敏感质量一定的情况下与加速度值成正比。
在一定的条件下,压电晶体受力后产生的电荷与所感受的加速度值成正比。
产生的电荷经过电荷放大器及其它运算处理后输出就是我们所需要的数据了Q=dij·F=dij·m a式中:Q ── 压电晶体输出的电荷dij ── 压电晶体的二阶压电张量m ── 加速度的敏感质量a ── 所受的振动加速度值'. 压电加速度计承受单位振动加速度值输出电荷量的多少,称其电荷灵敏度,单位为pC/ms-2或pC/g(1g = 9.8ms-2)。
压电加速度计实质上相当于一个电荷源和一只电容器,通过等效电路简化以后,则可换算出加速度计的电压灵敏度为Sv = SQ/CaSv ── 加速度计的电压灵敏度 mV/ms-2SQ ── 加速度计的电荷灵敏度 pC/ms-2Ca ── 加速度计的电容量压电式速度传感器,它是通过在压电式加速度传感器上加一个积分电路,通过将加速度信号积一次分,可以得到振动的速度值!在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。
速度又与能量和功率有关,并决定动量的大小。
振速与振幅对照表
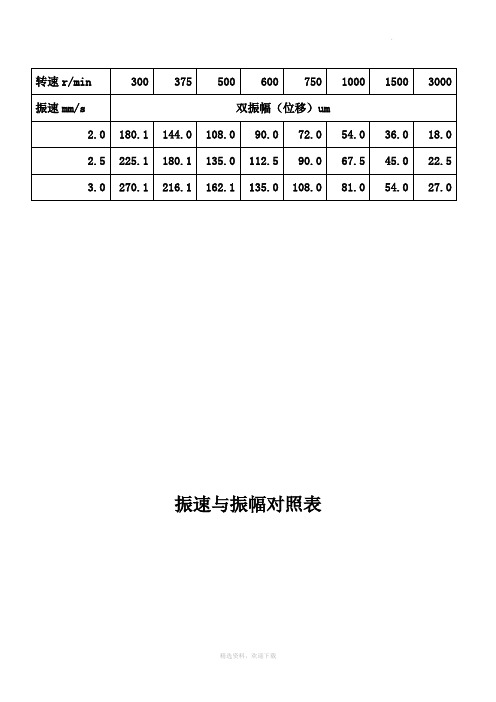
振速与振幅对照表
1、mm是振幅值,mm/s是振速,也叫振动烈度。
不同的转机可能按照制造厂的出厂说明采取不同的单位来考核。
换算公式可以用:A=V×1000×60×2^(0.5)/(pi×w)A是振动位移峰峰值,单位um。
V是振动烈度,w是转速(r/min)。
2、风机运行工况一般通过测量其轴承温度和振动来判定。
振动大小可
通过测量振动位移、振动速度、振动加速度的方式来判定。
太仓港环保发电有限公司送风机和一次风机测量的是振动速度(单位为mm/s),引风机测量的是振动位移(单位为um)。
通常大家习惯于测量振动位移(即振幅),这就存在振动位移和振动速度二者相互换算,其换算公式为: Veff=7.4×10-5ns Veff---振动速度,单位为mm/s s------振动位移, 单位为um n------风机转速, 单位为r/min
3、mm/s指振速,mm指振幅,因为不能输入公式编辑器,简单地说二者换算关系为:Sf≈0.225vf/f,式中Sf 为振动的位移幅值,vf 为主频率为f的振动速度的均方根值。
一般f值均为10Hz,所以Sf≈0.0225vf 。
举例说如果vf =1.00mm/s,那么换算成振幅则为Sf≈0.0225mm。
Welcome !!! 欢迎您的下载,资料仅供参考!。
振动单位换算表.docx
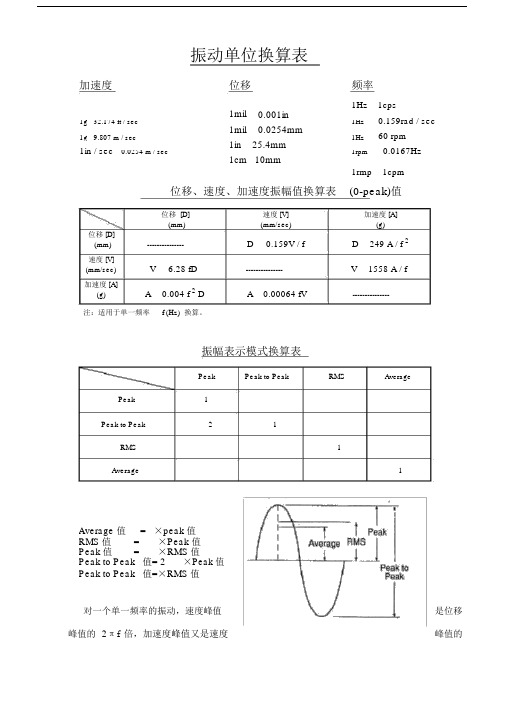
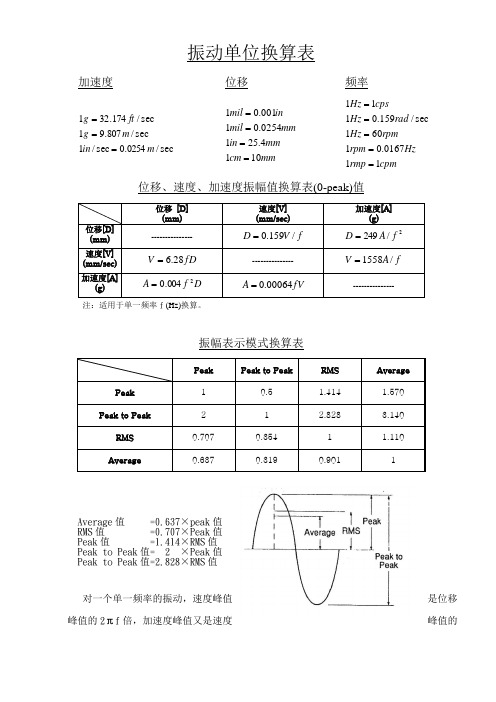
振动单位换算表加速度位移频率1mil 1Hz1cps 0.001in 0.159rad / sec1g 32.174 ft / sec 1Hz1mil0.0254mm60 rpm 1g 9.807 m / sec1Hz 1in / sec1in 25.4mm 0.0167Hz 0.0254 m / sec1rpm1cm 10mm1cpm1rmp位移、速度、加速度振幅值换算表(0-peak)值位移 [D] 速度 [V] 加速度 [A](mm)(mm/sec)(g)位移 [D] ---------------D 0.159V / f D 249 A / f2(mm) 速度 [V] V 6.28 fD ---------------V1558 A / f(mm/sec) 加速度 [A]A0.004 f 2DA0.00064 fV---------------(g)注:适用于单一频率f (Hz) 换算。
振幅表示模式换算表PeakPeak to Peak RMS AveragePeak1Peak to Peak21RMS1Average1Average 值 = ×peak 值 RMS 值 = ×Peak 值 Peak 值 = ×RMS 值 Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=×RMS 值对一个单一频率的振动,速度峰值是位移峰值的2πf 倍,加速度峰值又是速度峰值的2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
但使用范围也有重叠。
振动一般可以用以下三个单位表示
振动一般可以用以下三个单位表示:mm、mm/s、mm/(s^2)。
mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定; mm/(s^2)振动加速度:一般用于高速转动机械的振动评定。
现在的测振仪一般都采用压电式的,结构形式大致有二种:① 压缩式;② 剪切式,其原理是利用石英晶体和人工极化陶瓷(PZT)的压电效应设计而成。
当石英晶体或人工极化陶瓷受到机械应力作用时,其表面就产生电荷,所形成的电荷密度的大小与所施加的机械应力的大小成严格的线性关系。
同时,所受的机械应力在敏感质量一定的情况下与加速度值成正比。
在一定的条件下,压电晶体受力后产生的电荷与所感受的加速度值成正比。
产生的电荷经过电荷放大器及其它运算处理后输出就是我们所需要的数据了Q=dij·F=dij·m a式中:Q ── 压电晶体输出的电荷dij ── 压电晶体的二阶压电张量m ── 加速度的敏感质量a ── 所受的振动加速度值'. 压电加速度计承受单位振动加速度值输出电荷量的多少,称其电荷灵敏度,单位为pC/ms-2或pC/g(1g = 9.8ms-2)。
压电加速度计实质上相当于一个电荷源和一只电容器,通过等效电路简化以后,则可换算出加速度计的电压灵敏度为Sv = SQ/CaSv ── 加速度计的电压灵敏度 mV/ms-2SQ ── 加速度计的电荷灵敏度 pC/ms-2Ca ── 加速度计的电容量压电式速度传感器,它是通过在压电式加速度传感器上加一个积分电路,通过将加速度信号积一次分,可以得到振动的速度值!在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。
速度又与能量和功率有关,并决定动量的大小。
振动分析中常用的计算公式
振动分析中常用的计算公式在振动分析中,有许多常用的计算公式,以下是一些常见的计算公式和它们的应用。
1. 频率(Frequency)计算公式:频率是指振动系统中单位时间内的往复运动次数。
频率的计算公式为:f=1/T其中,f为频率,T为周期,频率的单位是赫兹(Hz)。
2. 周期(Period)计算公式:周期是指振动系统中一个完整循环所需的时间。
周期的计算公式为:T=1/f其中,T为周期,f为频率,周期的单位是秒(s)。
3. 振幅(Amplitude)计算公式:振幅是指振动系统中最大偏离平衡位置的距离。
振幅的计算公式为:A = (x1 + x2 + ... + xn) / n其中,A为振幅,xi为第i个测量值,n为测量次数。
4. 谐振频率(Resonant Frequency)计算公式:谐振频率是指在没有外力作用下,振动系统自然地振动的频率。
谐振频率的计算公式为:f=√(k/m)/(2π)其中,f为谐振频率,k为系统的弹性系数(刚度),m为系统的质量,谐振频率的单位是赫兹(Hz)。
5.等效刚度(Equivalent Stiffness)计算公式:等效刚度是指在多个弹簧(或多个质量)连接的振动系统中,与整个系统的振动特性相同的单个刚度。
等效刚度的计算公式为:keq = k1 + k2 + ... + kn其中,keq为等效刚度,ki为第i个弹簧(或质量)的刚度。
6.等效质量(Equivalent Mass)计算公式:等效质量是指在多个质量连接的振动系统中,与整个系统的振动特性相同的单个质量。
等效质量的计算公式为:meq = m1 + m2 + ... + mn其中,meq为等效质量,mi为第i个质量。
7. 阻尼比(Damping Ratio)计算公式:阻尼比是指振动系统中阻尼力与临界阻尼力之比。
阻尼比的计算公式为:ζ = c / (2√(mk))其中,ζ为阻尼比,c为阻尼系数,m为质量,k为刚度。
8. 动力响应(Dynamic Response)计算公式:动力响应是指系统在受到外界力作用时的振动响应。
振动单位换算表(完整资料).doc
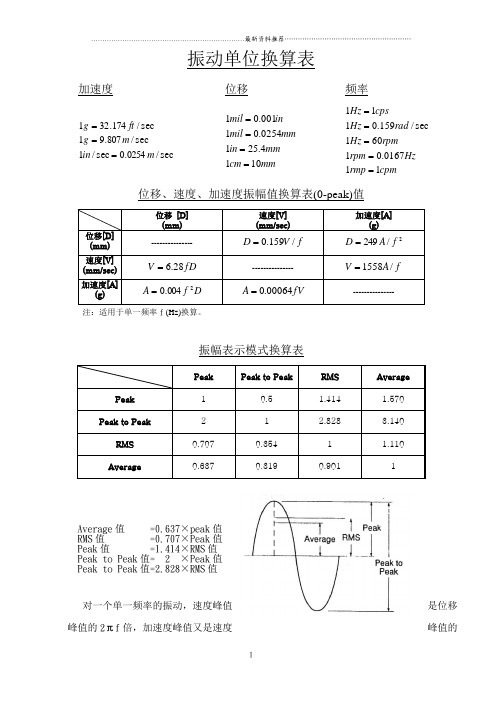
此文档下载后即可编辑 振动单位换算表 加速度位移 频率 sec /0254.0sec /1sec/807.91sec/174.321m in m g ft g === mm cm mmin mm mil in mil 1014.2510254.01001.01==== cpm rmp Hzrpm rpm Hz rad Hz cps Hz 110167.01601sec /159.0111=====位移、速度、加速度振幅值换算表(0-peak)值 位移 [D] (mm) 速度[V] (mm/sec) 加速度[A] (g) 位移[D] (mm) --------------- f V D /159.0= 2/249f A D = 速度[V] (mm/sec) fD V 28.6= --------------- f A V /1558= 加速度[A] (g)D f A 2004.0= fV A 00064.0= ---------------振幅表示模式换算表Peak Peak to Peak RMS Average Peak1 0.5 1.414 1.570 Peak to Peak2 1 2.828 3.140 RMS0.707 0.354 1 1.110 Average0.637 0.319 0.901 1Average 值 =0.637×peak 值 RMS 值 =0.707×Peak 值 Peak 值 =1.414×RMS 值 Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=2.828×RMS 值对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
测振仪单位mm、mms、mms?关系及换算

测振仪单位mm、mms、mms²关系及换算振动一般可以用以下三个单位表示:mm、mm/s、mm/s²,即振幅、振动速度(振速)、振动加速度。
振幅是表象,速度和加速度是转子激振力的程度。
•振动位移:理解成路程,单位是mm,一般用于低转速机械的振动评定;•振动速度:理解成速度,单位是mm/s,一般用于中速转动机械的振动评定;•振动加速度:理解成运动加速度,单位mm/s²,一般用于高速转动机械的振动评定。
工程实用的振动速度是速度的有效值,表征的是振动的能量。
加速度是用的峰值,表征振动中冲击力的大小。
速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。
振幅相同的设备,它的振动状态可能不同,所以引入了振速。
位移、速度、加速度都是振动测量的度量参数。
就概念而言,位移的测量能够直接反映轴承固定螺栓和其它固定件上的应力状况。
例如通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况;速度反映轴承及其它相关结构所承受的疲劳应力,而这正是导致旋转设备故障的重要原因;加速度则反映设备内部各种力的综合作用。
表达上三者均为正弦曲线,分别有90度、180度的相位差。
现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。
而那些加速度很小位移较大的设备,一般采用折衷的方法,即采用速度测量。
对于高速度或高频设备,有时尽管位移很小速度也适中,但其加速度却可能很高的设备,采用加速度测量是非常重要的手段。
另外还需要了解传感器的工作原理及应用选择,提及一点,例如采用涡流传感器测量的位移和应用加速度传感器,通过两次积分输出的位移所得到的东西是完全不一样的。
涡流传感器测量轴承与轴杆之间的相对运动;加速度传感器测量轴承顶部的振动,然后转换成位移。
如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。
两种传感器测量两种不同的现象。
振动单位换算表
振动单位换算表加速度位移频率sec/0254.0sec /1sec /807.91sec /174.321m in m g ft g ===mmcm mm in mm mil inmil 1014.2510254.01001.01==== cpmrmp Hz rpm rpm Hz rad Hz cpsHz 110167.01601sec/159.0111=====位移、速度、加速度振幅值换算表(0-peak)值注:适用于单一频率f (Hz)换算。
振幅表示模式换算表Average 值 =0.637×peak 值 RMS 值 =0.707×Peak 值 Peak 值 =1.414×RMS 值 Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=2.828×RMS 值对一个单一频率的振动,速度峰值是位移峰值的峰值的2πf 倍,加速度峰值又是速度2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
但使用范围也有重叠。
位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。
速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上都是以速度有效值为标准的。
加速度和力成正比,一般用其峰值,其大小表示了振动中最大的冲击力,冲击力大设备更容易疲劳损坏,现在没有加速度的标准。
振动幅值的表达式是正弦函数形式的,位移微分得到速度,速度微分得到加速度。
则:振动位移方程式: Y=Asinωt振动速度方程式: V= -Aωcosωt振动速度方程式: G= -Aωωsinωt如果振动频率为f的话,那么ω=2πf 其中π=3.1415926如果是单频率f的振动,位移的幅值为A,则速度幅值为2πfA,加速度幅值为2πf*2πfA。
振动单位换算表

振动单位换算表 加速度 位移 频率sec /0254.0sec /1sec/807.91sec/174.321m in m g ft g === mm cm mmin mm mil in mil 1014.2510254.01001.01==== cpm rmp Hzrpm rpm Hz rad Hz cpsHz 110167.01601sec /159.0111=====位移、速度、加速度振幅值换算表(0-peak)值位移 [D] (mm) 速度[V] (mm/sec) 加速度[A] (g) 位移[D] (mm)--------------- f V D /159.0= 2/249f A D = 速度[V] (mm/sec)fD V 28.6= --------------- f A V /1558= 加速度[A] (g) D f A 2004.0= fV A 00064.0=--------------- 注:适用于单一频率f (Hz)换算。
振幅表示模式换算表Peak Peak to Peak RMS Average Peak1 0.5 1.414 1.570 Peak to Peak2 1 2.828 3.140 RMS0.707 0.354 1 1.110 Average 0.637 0.319 0.901 1Average 值 =0.637×peak 值 RMS 值 =0.707×Peak 值 Peak 值 =1.414×RMS 值 Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=2.828×RMS 值对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
振动单位换算表

振动单位换算表振动单位换算表:1 Hz = 1 cps1 Hz = 0.159 rad/sec1 g = 32.174 ft/sec1 g = 9.807 m/sec1 in/sec = 0.0254 m/sec1 mil = 0.001 in1 mil = 0.0254 mm1 in = 25.4 mm1 cm = 10 mm1 Hz = 60 rpm1 rpm = 0.0167 Hz1 rpm = 1 cpm位移、速度、加速度振幅值换算表(0-peak)值:位移[D] (mm) 速度[V] (mm/sec) 加速度[A] (g)位移[D] (mm) --------------- 速度[V] (mm/sec) 加速度[A] (g) D = 0.159V/f --------------- D = 249A/f^2V = 6.28fDA = 0.004f^2DV = 1558A/f --------------- A = 0.fV注:适用于单一频率f(Hz)换算。
振幅表示模式换算表:Peak Peak to Peak RMS AveragePeak 1 2 0.707 0.637Peak to Peak 0.5 1 0.354 0.319 RMS 1.414 2.828 1 0.901 Average 1.570 3.140 1.110 1其中。
Average值 = 0.637 × peak值RMS值 = 0.707 × Peak值Peak值 = 1.414 × RMS值Peak to Peak值 = 2 × Peak值Peak to Peak值 = 2.828 × RMS值对于单一频率的振动,速度峰值是位移峰值的2πf倍,而加速度峰值是速度峰值的2πf倍。
需要注意的是,位移一般使用峰峰值,速度使用有效值,加速度使用峰值。
此外,现场测量的位移是轴和轴瓦的相对振动,而速度和加速度测量的是轴瓦的绝对振动。
振动单位换算

振动单位换算
振动一般可以用以下三个单位表示:mm、mm/s、mm/s2,即振幅、振动速度(振速)、振动加速度,振幅是表象,速度和加速度是转子激振力的程度。
振动位移:理解成路程,单位是mm,一般用于低转速机械的振动评定;
振动速度:理解成速度,单位是mm/s,一般用于中速转动机械的振动评定;
振动加速度:理解成运动加速度,单位mm/s2,一般用于高速转动机械的振动评定。
工程实用的振动速度是速度的有效值,表征的是振动的能量。
加速度是用的峰值,表征振动中冲击力的大小。
速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。
振幅相同的设备,它的振动状态可能不同,所以引入了振速。
位移、速度、加速度都是振动测量的度量参数。
就概念而言,位移的测量能够直接反映轴承固定螺栓和其它固定件上的应力状况。
例如通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况:速度反映轴承及其它相关结构所承受的疲劳应力,而这正是导致旋转设备故障的重要原因:加速度则反映设备内部各种力的综合作用。
表达上三者均为正弦曲线,分别有90度、180度的相位差。
现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。
而那些加速度很小位移较大的设备,
一般采用折衷的方法,即采用速度测量。
对于高速度或高频设备,有时尽管位移很小速度也适中,但其加速度却可能很高的设备,采用加速度测量是非常重要的手段。
振动单位换算表精编版
振动单位换算表 加速度 位移 频率sec /0254.0sec /1sec/807.91sec/174.321m in m g ft g === mm cm mmin mm mil in mil 1014.2510254.01001.01==== cpm rmp Hzrpm rpm Hz rad Hz cpsHz 110167.01601sec /159.0111=====位移、速度、加速度振幅值换算表(0-peak)值注:适用于单一频率f (Hz)换算。
振幅表示模式换算表Average 值 =0.637×peak 值RMS 值 =0.707×Peak 值Peak 值 =1.414×RMS 值Peak to Peak 值= 2 ×Peak 值Peak to Peak 值=2.828×RMS 值对一个单一频率的振动,速度峰值是位移峰值的峰值的2πf 倍,加速度峰值又是速度2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
但使用范围也有重叠。
位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。
速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上都是以速度有效值为标准的。
加速度和力成正比,一般用其峰值,其大小表示了振动中最大的冲击力,冲击力大设备更容易疲劳损坏,现在没有加速度的标准。
振动幅值的表达式是正弦函数形式的,位移微分得到速度,速度微分得到加速度。
则:振动位移方程式: Y=Asinωt振动速度方程式: V= -Aωcosωt振动速度方程式: G= -Aωωsinωt如果振动频率为f的话,那么ω=2πf 其中π=3.1415926如果是单频率f的振动,位移的幅值为A,则速度幅值为2πfA,加速度幅值为2πf*2πfA。
振动单位换算
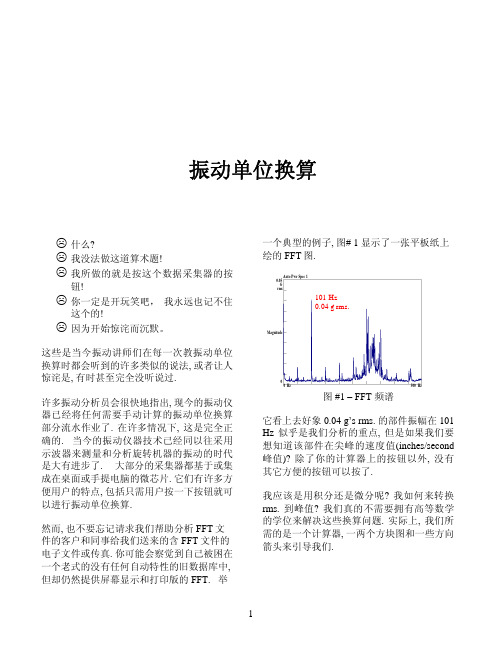
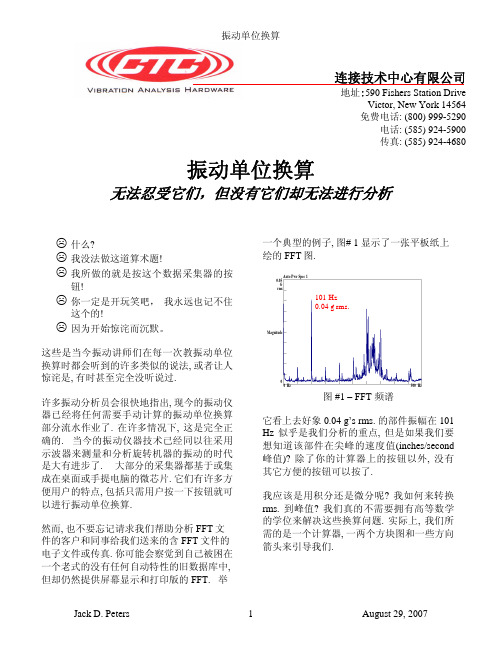
在图 #4 中, “Pi”的值大约是 3.14, “f” 的值是 要被转换的振幅组成部分的频率. 在图#1 的 例子中, 0.04 g’s rms.振幅组成部分的频率的 值是 101 Hz. 因此, 如果我们采用图#1 的数 据和图#4 的方块图的话, “f” 的值将等于 101 Hz .
让我们试试采用图#4 的方块图将图#1 的数据 (0.04 g’s rms. 在 101 Hz) 转换(积分)为速度. 从图#4 方块图的顶端开始按照箭头方向向右 移动到显示乘数为 9807 的数学方块处, 我们 可 以 将 用 g’s 表 示 的 加 速 度 值 转 换 成 以 mm/second2 表示的加速度值
要将换峰值转换到峰-峰值, 必须连续向方块
图的左上方移动. 在左上方角的数学方块表 示我们必须用 2 乘以峰值来得到峰-峰值.
0.057 g’s 峰 值 x 2 = 0.114 g’s 峰-峰值
同样, 我们如果要转换 0.114 g’s 峰-峰值到峰 值, 我们会从方块图的上方向右边箭头移动. 数学方块表示我们必须用 2 来除以峰-峰值来 得到峰值.
我应该是用积分还是微分呢? 我如何来转换 rms. 到峰值? 我们真的不需要拥有高等数学 的学位来解决这些换算问题. 实际上, 我们所 需的是一个计算器, 一两个方块图和一些方向 箭头来引导我们.
1
振动单位换算
转换单位后缀:
在我们开始进行加速度, 速度和位移单位换算 前, 让我们先来学习如何将单位从 rms 转换成 峰值再到峰-峰值. 峰值和 rms 通常被用在 FFT 图中, 表示一个频率组成的幅度. 峰值通 常和测得的最大幅值相关, 而 rms. (均方根) 经常和能量或幅度功率相联. 这两个单位都被 用于测量加速度和速度. 位移的测量是使用 峰-峰值单位后缀来表示振动所导致的总移动 或动作. 在所有单位之间进行换算是可能的, 现在就让我们用图#2 的带箭头的方块图来作 例子讲解.
位移振动和速度振动单位换算
关于振动单位峰峰值mm和速度值mm/s之间的区别和联系峰峰值是指振幅,速度是指速度的最大值,还有一个是加速度,也就是速度的变化的快慢.位移对时间的导数是速度,速度对时间的导数就是加速度2π×频率×振动位移值=振动速度值(3000r/min对应50HZ,振动稳定时,该公式差不多)就EPRO系统而讲。
瓦振在正常校验卡件时所用是速度传感器。
其测量出是振幅的特征值。
如物理公式。
设振动运动方程是正弦波。
A =asinwt则速度为V=awsinwt它们的特征值相差如上楼所说。
所以一般TSI厂家校验振动探头时给出速度传感器的灵敏度。
而后根据卡件的量程设定算出应该的正弦波有效值。
不仔细说了。
总之在相同的有效电压输入下,频率低则峰峰值高。
而且现场带度传感器过来的信号不能简单地用万用表测量。
它们可能分为不同的倍频进行问题分析。
大多数电厂都不引进分析系统。
所以振动专家也不容易呀。
对于轴振则不用非常考虑频率的问题。
但新的数字卡件也引入了很多这方面的功能。
这太深了。
知道上述问题也就可以在电厂够应用了。
mm/s是振动速度值,一般采用10~1KHz范围内的均方根值,也就是说的振动烈度。
7丝就是70um,是振动位移值。
一般衡量汽机或者大型设备采用振动位移标准来衡量设备振动情况,普通的电机或者泵采用振动速度值,详见国标10086。
mm是振动幅值,用户,特别是电厂,考核的是振动幅值。
mm/s是振动速度,电机的国家标准考核的就是振动速度。
mm/(s^2)是振动加速度,一般用于高速电机的振动评定。
在实际应用中,有可能振动幅值合格,但振动速度不合格;也有可能振动速度合格,但振动幅值不合格,在实际应用中出现过这种情况的。
一般电机厂用的测振动的仪器有三档,分别测振幅、振动速度和振动加速度。
mm、mm/s、mm/(s^2)是不可能相互转换的。
mm是距离单位;mm/s是速度单位;mm/(s^2)是加速度单位。
mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定; mm/(s^2)振动加速度:一般用于高速转动机械的振动评定。
振动单位换算
图的左上方移动. 在左上方角的数学方块表 示我们必须用 2 乘以峰值来得到峰-峰值.
0.057 g’s 峰 值 x 2 = 0.114 g’s 峰-峰值
同样, 我们如果要转换 0.114 g’s 峰-峰值到峰 值, 我们会从方块图的上方向右边箭头移动. 数学方块表示我们必须用 2 来除以峰-峰值来 得到峰值.
我应该是用积分还是微分呢? 我如何来转换 rms. 到峰值? 我们真的不需要拥有高等数学 的学位来解决这些换算问题. 实际上, 我们所 需的是一个计算器, 一两个方块图和一些方向 箭头来引导我们.
Jack D. Peters
1
August 29, 2007
振动单位换算
转换单位后缀:
在我们开始进行加速度, 速度和位移单位换算 前, 让我们先来学习如何将单位从 rms 转换成 峰值再到峰-峰值. 峰值和 rms 通常被用在 FFT 图中, 表示一个频率组成的幅度. 峰值通 常和测得的最大幅值相关, 而 rms. (均方根) 经常和能量或幅度功率相联. 这两个单位都被 用于测量加速度和速度. 位移的测量是使用 峰-峰值单位后缀来表示振动所导致的总移动 或动作. 在所有单位之间进行换算是可能的, 现在就让我们用图#2 的带箭头的方块图来作 例子讲解.
G rms
101 Hz 0.04 g rms.
Magnitude
0 0 Hz
500 Hz
图 #1 – FFT 频谱
它看上去好象 0.04 g’s rms. 的部件振幅在 101 Hz 似乎是我们分析的重点, 但是如果我们要 想知道该部件在尖峰的速度值(inches/second 峰值)? 除了你的计算器上的按钮以外, 没有 其它方便的按钮可以按了.
振动单位换算表
振动单位换算表加速度位移频率位移、速度、加速度振幅值换算表(0-peak)值注:适用于单一频率f (Hz)换算。
振幅表示模式换算表RMS值 =0.707×Peak值Peak值 =1.414×RMS值Peak to Peak值= 2 ×Peak值Peak to Peak值=2.828×RMS值对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
但使用范围也有重叠。
位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。
速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上都是以速度有效值为标准的。
加速度和力成正比,一般用其峰值,其大小表示了振动中最大的冲击力,冲击力大设备更容易疲劳损坏,现在没有加速度的标准。
振动幅值的表达式是正弦函数形式的,位移微分得到速度,速度微分得到加速度。
则:振动位移方程式: Y=Asinωt振动速度方程式: V= -Aωcosωt振动速度方程式: G= -Aωωsinωt如果振动频率为f的话,那么ω=2πf 其中π=3.1415926如果是单频率f的振动,位移的幅值为A,则速度幅值为2πfA,加速度幅值为2πf*2πfA。
但是工程中读取的振动值,位移用峰峰值,速度用有效值,加速度用峰值。
所以一个单频率的振动,位移读数是A的话,速度应该是0.707πfA,加速度是2πf*πfA。
但是因为现场是复杂的,不是单一频率的振动,所以位移,速度和加速度读数间通常没有确定的换算关系。
位移振动和速度振动单位换算

位移振动和速度振动单位换算Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】关于振动单位峰峰值mm和速度值mm/s之间的区别和联系峰峰值是指振幅,速度是指速度的最大值,还有一个是加速度,也就是速度的变化的快慢.位移对时间的导数是速度,速度对时间的导数就是加速度2π×频率×振动位移值=振动速度值(3000r/min对应50HZ,振动稳定时,该公式差不多)就EPRO系统而讲。
瓦振在正常校验卡件时所用是速度传感器。
其测量出是振幅的特征值。
如物理公式。
设振动运动方程是正弦波。
A=asinwt则速度为V=awsinwt它们的特征值相差如上楼所说。
所以一般TSI厂家校验振动探头时给出速度传感器的灵敏度。
而后根据卡件的量程设定算出应该的正弦波有效值。
不仔细说了。
总之在相同的有效电压输入下,频率低则峰峰值高。
而且现场带度传感器过来的信号不能简单地用万用表测量。
它们可能分为不同的倍频进行问题分析。
大多数电厂都不引进分析系统。
所以振动专家也不容易呀。
对于轴振则不用非常考虑频率的问题。
但新的数字卡件也引入了很多这方面的功能。
这太深了。
知道上述问题也就可以在电厂够应用了。
mm/s是振动速度值,一般采用10~1KHz范围内的均方根值,也就是说的振动烈度。
7丝就是70um,是振动位移值。
一般衡量汽机或者大型设备采用振动位移标准来衡量设备振动情况,普通的电机或者泵采用振动速度值,详见国标10086。
mm是振动幅值,用户,特别是电厂,考核的是振动幅值。
mm/s是振动速度,电机的国家标准考核的就是振动速度。
mm/(s^2)是振动加速度,一般用于高速电机的振动评定。
在实际应用中,有可能振动幅值合格,但振动速度不合格;也有可能振动速度合格,但振动幅值不合格,在实际应用中出现过这种情况的。
一般电机厂用的测振动的仪器有三档,分别测振幅、振动速度和振动加速度。
mm、mm/s、mm/(s^2)是不可能相互转换的。
API标准振动值计算公式
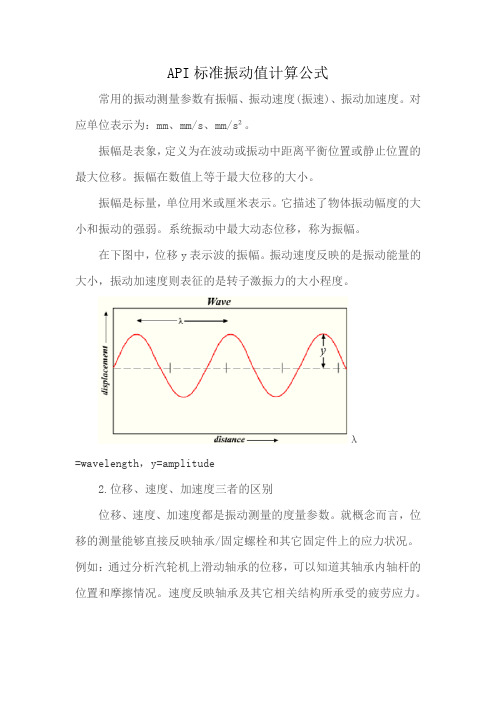
API标准振动值计算公式常用的振动测量参数有振幅、振动速度(振速)、振动加速度。
对应单位表示为:mm、mm/s、mm/s²。
振幅是表象,定义为在波动或振动中距离平衡位置或静止位置的最大位移。
振幅在数值上等于最大位移的大小。
振幅是标量,单位用米或厘米表示。
它描述了物体振动幅度的大小和振动的强弱。
系统振动中最大动态位移,称为振幅。
在下图中,位移y表示波的振幅。
振动速度反映的是振动能量的大小,振动加速度则表征的是转子激振力的大小程度。
λ=wavelength,y=amplitude2.位移、速度、加速度三者的区别位移、速度、加速度都是振动测量的度量参数。
就概念而言,位移的测量能够直接反映轴承/固定螺栓和其它固定件上的应力状况。
例如:通过分析汽轮机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。
速度反映轴承及其它相关结构所承受的疲劳应力。
而这正是导致旋转设备故障的重要原因。
加速度则反映设备内部各种力的综合作用。
表达上三者均为正弦曲线,分别有90度,180度的相位差。
现场应用上,对于低速设备(转速小于1000rpm)来说,位移是最好的测量方法。
而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。
3.现场的一般选用原则振动位移:与频率f无关,特别适合低频振动(<10Hz))选用,一般用于低转速机械的振动评定。
振动速度:速度V=Xω,与频率f成正比,通常推荐选用,一般用于中速转动机械(或中频振动(10~1000Hz))的振动评定。
振动加速度:A=Vω=Xω²,与频率f²成正比,特别适合高频振动选用,一般用于高速转动机械(或高频振动(>1000Hz))的振动评定。
其中:工程上对于大多数机器来说,最佳诊断参数是速度(速度的有效值),因为它是反映诊断强度的理想参数,表征的是振动的能量;所以国际上许多振动诊断标准都是采用速度有效值作为判别参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
振动单位换算表
位移 [D] (mm)
速度 [V] (mm/sec) 加速度 [A]
(g)
位移 [D]
(mm)
D 0.159V / f
D 249A/ f 2 速度 [V]
(mm/sec)
V 6.28fD
V 1558 A / f
加速度 [A]
(g)
A 0.004f 2D A 0.00064 fV
f (Hz) 振幅表示模式换算表
Peak
Peak to Peak
RMS
Average
Peak 1
Peak to Peak
2
1
RMS
1
Average
1
Average 值 = ×peak 值 RMS 值 = ×Peak
值 Peak 值 = ×RMS 值
Peak to Peak 值= 2 ×Peak 值 Peak to Peak 值=×RMS 值
对一个单一频率的振动,速度峰值 峰值的 2π f 倍,加速度峰值又是速度峰值的 2πf 倍。
加速度
1g 32.174 ft /sec 1g 9.807 m / sec
1in /sec 0.0254 m / sec
位移
1mil 0.001in 1mil 0.0254mm 1in 25.4mm 1cm 10mm
频率
1Hz 1cps 1Hz 0.159rad /sec 1Hz 60rpm 1rpm 0.0167Hz 1rmp 1cpm
位移、速度、加速度振幅值换算表 (0-peak)值
是位移
当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。
还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。
假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。
高频振动位移则极小,加速度很大。
所以一般在低频区域都用位移,高频区域用加速度,中频用速度。
但使用范围也有重叠。
位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。
速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上都是以速度有效值为标准的。
加速度和力成正比,一般用其峰值,其大小表示了振动中最大的冲击力,冲击力大设备更容易疲劳损坏,现在没有加速度的标准。
振动幅值的表达式是正弦函数形式的,位移微分得到速度,速度微分得到加速度。
则:
振动位移方程式:Y=Asin ωt
振动速度方程式:V= -A ωcosωt
振动速度方程式:G= -A ωωsin ωt
如果振动频率为f 的话,那么ω=2πf 其中π=
如果是单频率f 的振动,位移的幅值为A,则速度幅值为2πfA ,加速度幅值为2πf*2 πfA 但是工程中读取的振动值,位移用峰峰值,速度用有效值,加速度用峰值。
所以一个单频率的振动,位移读数是A 的话,速度应该是πfA ,加速度是2πf* πfA 。
但是因为现场是复杂的,不是单一频率的振动,所以位移,速度和加速度读数间通常没有确定的换算关系。
但是振动频率比较单一,以一个频率为主时可以利用上述关系近似计算。
计算方法举例:
s = 峰值偏移振幅,μm
N = 频率min-1 f = 频率Hz
Veff = 有效振动速率mm/s
Veff =
1. 机械振动物体相对于平衡位置所作的的往复运动称为机械振动。
简称振动。
“ 振动三要素” —振幅、频率、相位。
2. 振幅振幅是物体动态运动或振动的幅度。
振幅是振动强度和能量水平的标志,是评判机器运转状态优劣的主要指标。
峰峰值、单峰值、有效值振幅的量值可以表示为峰峰值(pp)、单峰值(p)(也称为最大值)、有效值(rms)或平均值(ap)。
峰峰值是整个振动历程的最大值,即正峰与负峰之间的差值;单峰值是正峰或负峰的最大值;有效值即均方根值。
只有在纯正弦波(如简谐振动)的情况下,单峰值等于峰峰值的1/2 ,有效值等于单峰值的倍,平均值等于单峰值的倍;平均值在振动测量中很少使用。
它们之间的换算关系是:峰峰值=2×单峰值=2×(2× 有效值)振动位移、振动速度、振动加速度振幅分别采用振动的位移、速度或加速度值加以描述、度量,三者可以通过微分或积分进行换算。
在振动测量中,除特别注明外,振动位移的量值为峰峰值,单位是微米[ μm,1毫米=100丝=1000微米]或密耳[mil] ;振动速度的量值为有效值,单位是毫米/秒[mm/s]或英寸/秒[ips] ;振动加速度的量值是单峰值,单位是重力加速度[g] 。
可以认为,振动位移具体地反映了间隙的大小,振动速度反映了能量的大小,振动加速度反映了冲击力的大小。
也可以认为,在低频范围内,振动强度与位移成正比;在中频范围内,振动强度与速度成正比;在高频范围内,振动强度与加速度成正比。
正是由于上述原因,在工厂的实际应用中,在通常情况下,大机组转子的振动用振动位移的峰峰值[ μm]表示,用装在轴承上的非接触式电涡流位移传感器来测量转子轴颈的振动;大机组轴承箱及缸体、中小型机泵的振动用振动速度的有效值[mm/s] 表示,用装在机器壳体上的磁电式速度传感器或压电式加速度传感器来测量;
齿轮的振动用振动加速度的单峰值[g] 表示,用加速度传感器来测量。
振动烈度、振动标准振动烈度是振动标准中的通用术语,是描述一台机器振动状态的特征量(大机组不完全如此)。
可以认为,振动烈度就是振动速度的有效值。
在国际及我国振动标准中,几乎都规定用振动速度的有效值来作为振动烈度的度量值。
此外,还要求在靠近轴承位置处的水平、垂直、轴向三个方向上进行测量。
所以,对一般的转动设备进行振动监测时,应测量振动速度的有效值。
因为只有振动烈度才有振动标准可以参照,评定机器运转状态的优劣才能有据可依。
右图为中石化旋转机械振动标准SHS0 1003-2004 关于机器振动烈度的评定等级表。
我国及国
际其它振动标准关于机器振动烈度的评定等级也大致如此。
其中,根据输出功率、机器—支承系统的刚性等将旋转机械分为如下4 类:
Ⅰ~小型转机,如15 kW 以下的电机;
Ⅱ~安装在刚性基础上的中型转机,功率在300 kW以下;
Ⅲ~大型转机,机器—支承系统为刚性支承状态;
Ⅳ~大型转机,机器—支承系统为挠性支承状态。
当支座的固有频率大于转子轴承系统的固有频率时,机器—支承系统为刚性支承状态;当支座的固有频率小于转子轴承系统的固有频率时,机器—支承系统为挠性支承状态。
对大型旋转机组转子振动的评定标准,我国及国际振动标准几乎都规定用在靠近轴承处轴颈振动位移的峰峰值进行度量,但评定标准的具体数值不够统一。
对石油化工用离心式压缩机及汽轮机,API617、API612 标准规定,在制造厂进行机械运转试验时,转子振动位移的峰峰值不应超过A 值或μm中的较小值,A=(12000/n )1/2 ,n为最大连续工作转速。
对石化大机组,转子实际运行中振幅的许可值应该遵照制造商的规定。
在无制造商规定时,也可以认为:
小于A值时为优良状态,A为(12000/n )1/2 或μm中的较小值;
大于A值、小于B值时为合格状态,B=~A,转速较低时取大值,转速高时取小值,B 值可设为低报警值;
大于B 值、小于C值时为不合格状态,C=,C为高报警值或连锁值;大于C值为不允许状态。
另外,当振动值变化的增量超过报警值(B 值)的25%时,应受到关注。
振动烈度与振动位移的转换
s ======= 25 μm(;个丝)s ======= μm
s ======= 63 μm
s ====== 100 μm
2√2×振动烈度/ 2 ∏f = 振动位移其中f 取50hz 大家习惯说位移叫振幅,其实位移,速度,加速度都叫振幅,是振动幅度的三种表述方式。
下边是我在其他论坛发过的三个量的换算关系:
关于振幅换算:旋转机械的振动方程是正弦函数形式的,位移微分得到速度,速度微分得到加速度。
所以三个参数的幅值间就有如下关系:
必须是单频率f 的振动,如果位移的幅值为A,则速度幅值为2πfA ,加速度幅值为2πf*2 π
fA 。
但是工程中读取的振动值,位移用峰峰值,速度用有效值,加速度用峰值。
所以一个单频率的振动,位移读数是A 的话,速度应该是πfA ,加速度是2πf* πfA 因为现场是复杂的,不是单一频率的振动,所以位移,速度和加速度读数间通常没有确定的换算关系。
但是振动频率比较单一,以一个频率为主时可以利用上述关系近似计算,比如通常振动都是一倍频的振动,所以公式中的频率f 就是设备的转速。