opencv 图像翻转旋转
python中opencv的旋转方法

一、介绍OpenCV库OpenCV是一个开源的计算机视觉库,它提供了一系列用于图像处理和计算机视觉的工具和函数。
OpenCV是基于BSD许可(Berkeley Software Distribution license)发行的,因此它可以免费用于商业和研究目的。
二、 Python中的OpenCVPython是一种简单而强大的编程语言,它在科学计算和图像处理领域得到了广泛的应用。
在Python中使用OpenCV库,可以方便快捷地进行图像处理和计算机视觉任务。
OpenCV库提供了丰富的API,可以用于图像处理、特征检测、对象识别等方面。
三、旋转图像的需求在图像处理中,有时需要对图像进行旋转操作,以便实现图像的矫正、校准或者特定角度的展示。
在Python中,可以利用OpenCV库实现图像的旋转操作。
四、旋转图像的方法在Python中,使用OpenCV库可以轻松实现图像的旋转操作。
下面介绍两种常用的旋转方法:1. 旋转函数在OpenCV中,可以使用getRotationMatrix2D()和warpAffine()两个函数来实现图像的旋转操作。
具体步骤如下:1)使用getRotationMatrix2D()函数来获取旋转矩阵。
该函数接受三个参数,分别为旋转中心点、旋转角度和缩放比例。
可以使用如下代码获取旋转矩阵:```center = (image.shape[1] / 2, image.shape[0] / 2)angle = 45scale = 1.0M = cv2.getRotationMatrix2D(center, angle, scale)```2)使用warpAffine()函数来进行图像的旋转。
该函数接受三个参数,分别为原始图像、旋转矩阵和输出图像大小。
可以使用如下代码进行图像的旋转:```rotated = cv2.warpAffine(image, M, (image.shape[1], image.shape[0]))```通过以上两个步骤,就可以实现图像的旋转操作。
opencv翻转函数

opencv翻转函数在OpenCV中,有3种不同的翻转函数:cv::flip()、cv::transpose()和cv::rotate()。
它们分别用于沿水平/垂直/对角线轴翻转矩阵、转置矩阵和旋转矩阵。
1. cv::flip()函数:。
该函数有3个参数:source(要翻转的矩阵)、dst(输出矩阵)和flipCode(用于指定要执行的操作)。
flipCode参数有3种不同的值:。
- flipCode = 0:沿x轴(垂直翻转)。
- flipCode > 0:沿y轴(水平翻转)。
- flipCode < 0:沿x轴和y轴(垂直和水平翻转)。
以下是一个使用cv::flip()翻转图像的示例:。
```。
cv::Mat src = cv::imread("input.jpg");。
cv::Mat dst;。
cv::flip(src, dst, 0); // 垂直翻转。
cv::imshow("Output", dst);。
cv::waitKey();。
```。
2. cv::transpose()函数:。
该函数用于矩阵转置,即交换行和列。
该函数只有1个参数:source (要转置的矩阵)。
以下是一个使用cv::transpose()转置矩阵的示例:。
```。
cv::Mat src = cv::Mat::eye(3, 3, CV_32FC1); // 生成一个3x3的单位矩阵。
cv::Mat dst;。
cv::transpose(src, dst); // 转置。
std::cout << src << std::endl << std::endl << dst << std::endl; // 输出源矩阵和目标矩阵。
```。
3. cv::rotate()函数:。
该函数用于对矩阵进行旋转。
它有4个参数:source(要旋转的矩阵)、dst(输出矩阵)、rotateCode(用于指定旋转方向)和rotateAngle(用于指定旋转角度)。
初学者福利!深度学习最常用的OpenCV操作——图像基本变换
初学者福利!深度学习最常用的OpenCV操作——图像基本变换OpenCV使用之三:图像的颜色、大小和角度变换图像处理是深度学习最重要的应用领域之一。
OpenCV是深度学习图像处理的好帮手。
前文【链接】我们介绍了初学者福利!深度学习最常用的OpenCV操作。
今天,易学智能继续介绍OpenCV中另一类常用的操作——图像变换。
给定一张图像,我们可以进行多种方式的变换,最基本的就是颜色、大小和角度的变换。
一、图像颜色的抽取与组合图像由RGB(红、绿、蓝)三原色构成,一幅图像在OpenCV里也是使用一个三通道的数组来表示,按照默认方式读取的图像,其通道排列是按照BGR的顺序进行排列的,即第1个通道是绿色,第2个通道是绿色,第3个通道是红色,通过对不组合可以实现颜色的变换,变换方法及效果如图1所示。
图1:图像颜色的抽取与组合第6行:将一个图片拆分成BGR三个通道。
第8行:生成一个空白的通道。
如果仅有1个通道,在OpenCV 将显示为灰度图,如果要显示彩色的图片,则必须保持3个通道,因此需要生成一个空白的通道用来保证结果显示为彩色。
第10到12行:将图像不同通道的数据与空白通道数据进行组合,形成一个三通道的数据。
注意组合的顺序,b、g和r的数据必须分别放到第0、1和2的位置上。
Tips:· OpenCV将图像表示成numpy的数组,因此也可以使用numpy 的函数来操作图像,实现拆分和组合。
关于Numpy的安装使用,可参考易学智能的文章【链接】。
· 在OpenCV中是按照HWC的顺序进行数据,拆分和组合需要在最后一个维度上进行。
二、图像大小变换在真实环境下得到的图像大小往往是不固定的。
但是,大多数深度学习模型,对于输入大小是有要求的,因此需要将不同大小的输入图像统一到同一个尺寸,大小变换方法及效果如图2所示。
2:图片大小的绽放Tips:1、新的尺寸是按照先WH的顺序来定义,即先宽度后高度,这与图像大小HWC顺序要进行区别。
python-opencv-图像镜像翻转

python-opencv-图像镜像翻转
图像镜像翻转的基本概念:
图像的镜像翻转指的是将图像以某条中轴线为中⼼进⾏镜像对换。
图像的镜像翻转根据翻转的⽅向可分为⽔平镜像翻转、垂直镜像翻转和对⾓镜像翻转3种。
⽔平镜像翻转指的是将图像的左右两部分以图像垂直中轴线为中⼼进⾏镜像对换。
垂直镜像翻转指的是将图像的上下两部分以图像⽔平中轴线为中⼼进⾏镜像对换。
对⾓镜像翻转指的将图像以图像⽔平中轴线和垂直中轴线的交点为中⼼进⾏镜像对换,也可以看做是以图像对⾓线为中⼼进⾏的镜像对换。
从上述描述中我们不难看出,图像的镜像翻转得到的图像与原图像构成的图像是⼀个轴对称图像。
import numpy as np
import cv2
img = cv2.imread("3.jpg")
cv2.imshow("yuan", img)
img1 = cv2.flip(img,1) #镜像
'''
参数2 必选参数。
⽤于指定镜像翻转的类型,其中0表⽰绕×轴正直翻转,即垂直镜像翻转;1表⽰绕y轴翻转,即⽔平镜像翻转;-1表⽰绕×轴、y轴两个轴翻转,即对⾓镜像翻转。
参数3 可选参数。
⽤于设置输出数组,即镜像翻转后的图像数据,默认为与输⼊图像数组⼤⼩和类型都相同的数组。
'''
cv2.imshow('dst',img1)
cv2.waitKey(0)
效果图:。
opencv如何实现图像旋转
opencv 如何实现图像旋转
旋转一般是指将图像围绕某一指定点旋转一定的角度,图像旋转后会有一部分图像转出显示区域,可以截图那部分,也可以改变图像的尺寸使得图像显示完全。
图像旋转原理
所谓图像旋转是指图像以某一点为中心旋转一定的角度,形成一幅新的图像的过程。
这个点通常就是图像的中心。
由于是按照中心旋转,所以有这样一个属性:旋转前和旋转后的点离中心的位置不变。
根据这个属性,可以得到旋转后的点的坐标与原坐标的对应关系。
原图像的坐标一般是以左上角为原点的,我们先把坐标转换为以图像中心为原点。
假设原图像的宽为w,高为h,(x0,y0)为原坐标内的一点,转换坐标后的点为(x1,y1)。
可以得到:。
python-opencv图像几何变换--缩放、平移、旋转

python-opencv图像⼏何变换--缩放、平移、旋转缩放缩放是调整图⽚的⼤⼩,可以指定输出图像尺⼨⼤⼩,也可以指定缩放⽐例。
opencv函数原型cv2.resize(InputArray src, OutputArray dst, Size, fx, fy, interpolation)InputArray src 输⼊图像OutputArrzy dst输出图像Size输出图像尺⼨fx, fy x轴,y轴的缩放系数interpolation插值⽅式interpolation插值⽅式:插值⽅式有INTER_NEAREST 最近邻插值、INTER_LINEAR 双线性插值、INTER_AREA 像素区域重采样、INTER_CUBIC 4*4像素邻域双三次插值、 INTER_LANCZOS4 8*8像素邻域Lanczos插值。
其中INTER_LINEAR为默认的插值⽅法,⾸选的插值⽅法是INTER_AREA。
我们可以使⽤以下⽅法调整图像⼤⼩:import cv2 as cvimg = cv.imread(r'Lena.png', 1)res1 = cv.resize(img, None, fx=0.5, fy=0.5, interpolation=cv.INTER_AREA)# Orheight, width = img.shape[ : 2]res2 = cv.resize(img, (int(0.5*width), int(0.5*height)), interpolation=cv.INTER_AREA)平移在对图像作平移操作时,需创建变换矩阵。
2⾏3列矩阵,决定了何种变换。
M矩阵则表⽰⽔平⽅向上平移为x⽽竖直⽅向上的平移距离为y。
import numpy as npimport cv2 as cvimg = cv.imread(r'Lena.png', 1)rows, cols, channels = img.shapeM = np.float32([[1,0,100],[0,1,50]])res = cv.warpAffine(img, M, (cols, rows))# cv.warpAffine()第三个参数为输出的图像⼤⼩,值得注意的是该参数形式为(width, height)。
opencv:图像的基本变换

opencv:图像的基本变换0.概述图像变换的基本原理都是找到原图和⽬标图的像素位置的映射关系,这个可以⽤坐标系来思考,在opencv中,图像的坐标系是从左上⾓开始(0,0),向右是x增加⽅向(cols),向下时y增加⽅向(rows)。
普通坐标关系:图像坐标关系:1.图像的平移图像的平移是⽐较简单的映射关系,对于原图像的某个像素点位置(X0,Y0),向右平移100个像素的话,变换之后的⽬标像素点位置(X =X0+100,Y),然后⽤原图像的像素值填充⽬标位置就可,因此我们需要将这种映射关系转换⼀下,⽅便获得原图像素值,也就是X0 = X-100,这⾥X是已知的。
具体代码如下:void translation(cv::Mat & src, cv::Mat & dst, int dx, int dy){const int rows = src.rows; // 获得原图的⾼度(y)const int cols = src.cols; // 获得原图的宽度(x)dst.create(rows, cols, src.type()); // 按照原图⼤⼩和格式创建⼀个空⽩图Vec3b *p;for (int Y = 0; Y < rows; ++Y) // 按⾏扫描{p = dst.ptr<Vec3b>(Y);for (int X = 0; X < cols; ++X){int X0 = X - dx; // 逆映射关系,求得原图的位置int Y0 = Y - dy;if (X0 >= 0 && Y0 >= 0 && X0 < cols && Y0 < rows) // 防⽌越界{p[X] = src.ptr<Vec3b>(Y0)[X0]; // 将原图的像素值赋给⽬标位置}}}}2.图像的缩放这⾥暂时只贴出opencv的缩放接⼝:void resize(InputArray src, //输⼊图像OutputArray dst, // 输出图像Size dsize, // 指定的输出图像的⼤⼩double fx=0, // 横向缩放⽐例double fy=0, // 纵向缩放⽐例int interpolation=INTER_LINEAR // 指定插值⽅式);3.图像的旋转图像旋转矩阵的原理可以参考基本映射关系:我们只需要根据这个映射关系写就好,其中的dx和dy主要⽤来计算旋转中⼼的,如果都是0的话图像就是围绕图像坐标(0,0)来旋转,该公式中的W'和H'指的是⽬标图像的宽度和⾼度。
如何利用opencv进行图形的旋转以及画出一个旋转的矩形

如何利用opencv进行图形的旋转以及画出一个旋转的矩形如何利用opencv进行图形的旋转以及画出一个旋转的矩形testRotateRect.cpp : 定义控制台应用程序的入口点。
0203 #include "stdafx.h"04 #include "opencv2/opencv.hpp"05 using namespace std;06 using namespace cv;07 int _tmain(int argc, _TCHAR* argv[])08 {09 Mat image(200,200,CV_8UC3,Scalar(0));10 RotatedRect rRect=RotatedRect(Point2f(100,100),Size2f(100,50),30); 定义一个旋转矩形11 Point2f vertices[4];12 rRect.points(vertices);提取旋转矩形的四个角点13 for(int i=0;i<4;i++)14 {15 line(image,vertices[i],vertices[(i+1)%4],Scalar(0,255,0));四个角点连成线,最终形成旋转的矩形。
16 }17 Mat img=imread("d:/fff.jpg");18 imshow("ran",image);19 waitKey();20 return 0;21 }在进行图形的旋转变换时,旋转中心一定是原图形的一个顶点.______.(判断对错由旋转的含义可知:在进行图形的旋转变换时,旋转中心一定是原图形的一个顶点,说法错误;故答案为:×.如何画图形的旋转任意画一个三角形,然后任取一个角做旋转中心O,再找旋转中心O的对称点,用量角器在旋转中心O那一点量出题目要你量的度数!再画出来。
OpenCV常用操作之计时、缩放、旋转、镜像

常用操作在OpenCV开发过程中用于测试性能计时的:计时(计算处理的时间)。
在一般的图像处理中有的几个操作:缩放(放大、缩小),旋转(90度的倍数)、镜像(x轴反向、y轴反向)。
注意:意角度的旋转使用cv::Mat不太合适,开发过程中会用到其他ui框架,所以使用其他ui框架做旋转是比较合适的。
计时函数OpenCV提供了两个渐变的计时函数:getTickCount()和getTickFrequency()。
getTickCount():getTickCount()函数返回CPU自某个事件(如启动电脑)以来走过的时钟周期数。
getTickFrequency():getTickFrequency()函数返回CPU一秒钟所走的时钟周期数。
测试结果如下:cv::getTickFrequency()获取的频率为10,000,000,得到cpu的周期为一千万次每秒。
访问图像中像素的三类方法cv::Mat访问的三类方法:方法一:at函数方法二:使用迭代器方法三:通过数据指针旋转(90度的整数倍)旋转90°的整数就是对矩阵位置进行变换,如下图:旋转函数1:cv::transpose()该函数无任何函数,直接对矩阵进行顺时钟旋转90°,函数原型如下:CV_EXPORTS_W void transpose(InputArray src, OutputArray dst);旋转函数2:cv::rotate()该函数旋转函数,三个枚举可以旋转90°,180°,270°,逆时针旋转90°就是顺时钟270°,函数原型如下:CV_EXPORTS_W void rotate(InputArray src, OutputArray dst, int rotateCode);参数一:输入mat参数二:输出mat参数三:旋转枚举,如下:enum RotateFlags {ROTATE_90_CLOCKWISE = 0, //Rotate 90 degrees clockwiseROTATE_180 = 1, //Rotate 180 degrees clockwiseROTATE_90_COUNTERCLOCKWISE = 2, //Rotate 270 degrees clockwise};代码示例:cv::rotate(srcMat, srcMat, cv::ROTATE_90_CLOCKWISE);镜像(x轴翻转,y轴翻转)镜像就是对X轴和Y轴的值翻转对调,如下图:翻转函数:cv::flip该函数为翻转函数,函数圆形如下:CV_EXPORTS_W void flip(InputArray src, OutputArray dst, int flipCode);参数一:输入mat参数二:输出mat参数三:只有3种值,小于0,等于0,大于0,分别对应xy轴翻转、x轴翻转、y轴翻转。
超详细注释之OpenCV旋转图像任意角度

超详细注释之OpenCV旋转图像任意⾓度上⼀篇博客介绍了。
这篇博客将介绍如何使⽤OpenCV旋转图像任意⾓度。
并演⽰如何使⽤imutils库中的两个函数imutils.rotate和imutils.rotate_bound不丢失细节的旋转图像。
使⽤OpenCV应⽤图像旋转时,有3种⽅法实现:1. cv2.getRotationMatrix2D 和 cv2.warpAffine;2. imutils.rotate 同⽅法1(可能局部丢失);3. imutils.rotate_bound(完整~);1. 效果图原始图如下,选取了我爱的颖宝明兰剧照:以图像中⼼,逆时针旋转45度效果图如下:以图像中⼼,顺时针旋转90度效果图如下:任意点(以10,10)为中⼼,逆时针旋转45度效果图如下:从上图可以看到旋转后有局部丢失。
这表明OpenCV不会⾃动为整个旋转图像分配空间,以适应帧。
如果希望在旋转后使整个图像适合视图,则需要进⾏优化,计算并更改旋转完的最⼩外接矩形宽度和⾼度。
优化旋转(不丢失局部)效果图如下:2. 原理M = cv2.getRotationMatrix2D((cX, cY), 45, 1.0)(cX,cY): 旋转的中⼼点坐标45: 旋转的度数,正度数表⽰逆时针旋转,⽽负度数表⽰顺时针旋转。
1.0:旋转后图像的⼤⼩,1.0原图,2.0变成原来的2倍,0.5变成原来的0.5倍注意: OpenCV不会⾃动为整个旋转图像分配空间,以适应帧。
旋转完可能有部分丢失。
如果您希望在旋转后使整个图像适合视图,则需要进⾏优化,使⽤imutils.rotate_bound.3. 源码# 对图像进⾏旋转# USAGE# python opencv_rotate.py# 导⼊必要的包import argparseimport cv2import imutils# 构建命令⾏参数及解析# --image 图像路径ap = argparse.ArgumentParser()ap.add_argument("-i", "--image", type=str, default="zly1.jpg",help="path to the input image")args = vars(ap.parse_args())# 从磁盘加载图像并展⽰image = cv2.imread(args["image"])image = imutils.resize(image, width=300)cv2.imshow("Original", image)# 获取图像的维度,并计算中⼼(h, w) = image.shape[:2](cX, cY) = (w // 2, h // 2)# 逆时针以图像中⼼旋转45度# - (cX,cY): 旋转的中⼼点坐标# - 45: 旋转的度数,正度数表⽰逆时针旋转,⽽负度数表⽰顺时针旋转。
OpenCV图像旋转实现
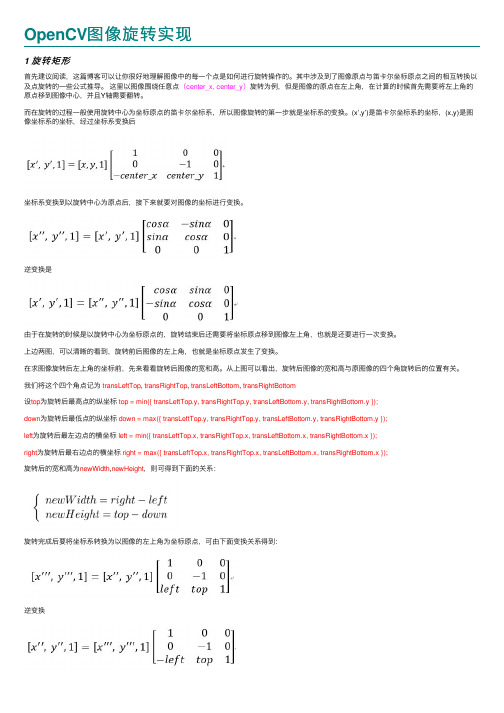
OpenCV图像旋转实现1 旋转矩形⾸先建议阅读,这篇博客可以让你很好地理解图像中的每⼀个点是如何进⾏旋转操作的。
其中涉及到了图像原点与笛卡尔坐标原点之间的相互转换以及点旋转的⼀些公式推导。
这⾥以图像围绕任意点(center_x, center_y)旋转为例,但是图像的原点在左上⾓,在计算的时候⾸先需要将左上⾓的原点移到图像中⼼,并且Y轴需要翻转。
⽽在旋转的过程⼀般使⽤旋转中⼼为坐标原点的笛卡尔坐标系,所以图像旋转的第⼀步就是坐标系的变换。
(x’,y’)是笛卡尔坐标系的坐标,(x,y)是图像坐标系的坐标,经过坐标系变换后坐标系变换到以旋转中⼼为原点后,接下来就要对图像的坐标进⾏变换。
逆变换是由于在旋转的时候是以旋转中⼼为坐标原点的,旋转结束后还需要将坐标原点移到图像左上⾓,也就是还要进⾏⼀次变换。
上边两图,可以清晰的看到,旋转前后图像的左上⾓,也就是坐标原点发⽣了变换。
在求图像旋转后左上⾓的坐标前,先来看看旋转后图像的宽和⾼。
从上图可以看出,旋转后图像的宽和⾼与原图像的四个⾓旋转后的位置有关。
我们将这个四个⾓点记为transLeftTop, transRightTop, transLeftBottom, transRightBottom设top为旋转后最⾼点的纵坐标top = min({ transLeftTop.y, transRightTop.y, transLeftBottom.y, transRightBottom.y });down为旋转后最低点的纵坐标down = max({ transLeftTop.y, transRightTop.y, transLeftBottom.y, transRightBottom.y });left为旋转后最左边点的横坐标left = min({ transLeftTop.x, transRightTop.x, transLeftBottom.x, transRightBottom.x });right为旋转后最右边点的横坐标right = max({ transLeftTop.x, transRightTop.x, transLeftBottom.x, transRightBottom.x });旋转后的宽和⾼为newWidth,newHeight,则可得到下⾯的关系:旋转完成后要将坐标系转换为以图像的左上⾓为坐标原点,可由下⾯变换关系得到:逆变换综合以上,也就是说原图像的像素坐标要经过三次的坐标变换:1. 将坐标原点由图像的左上⾓变换到旋转中⼼2. 以旋转中⼼为原点,图像旋转⾓度a3. 旋转结束后,将坐标原点变换到旋转后图像的左上⾓可以得到下⾯的旋转公式:(x’,y’)旋转后的坐标,(x,y)原坐标,(x0,y0)旋转中⼼,a旋转的⾓度(顺时针)这种由输⼊图像通过映射得到输出图像的坐标,是向前映射。
opencv 计算旋转平移变换
opencv 计算旋转平移变换
计算旋转平移变换是计算机视觉领域中的一项重要任务,它可以在图像中实现旋转和平移的操作。
通过使用OpenCV库,我们可以很容易地实现这些变换,并在图像上观察到相应的效果。
在计算旋转平移变换之前,我们首先需要加载和处理图像。
使用OpenCV库中的函数,我们可以读取图像并将其转换为灰度图像,以便更好地处理。
之后,我们可以定义旋转和平移的参数,例如旋转角度和平移距离。
接下来,我们可以使用OpenCV提供的函数来计算旋转平移变换。
对于旋转变换,我们可以使用cv2.getRotationMatrix2D函数来获取旋转矩阵,然后使用cv2.warpAffine函数将旋转矩阵应用于图像。
对于平移变换,我们可以使用cv2.warpAffine函数,并指定平移的距离来实现平移操作。
完成旋转平移变换后,我们可以将结果显示在屏幕上,以便观察变换的效果。
通过使用OpenCV库提供的函数,我们可以将原始图像和变换后的图像并排显示,以便进行比较。
通过使用OpenCV库中的函数和方法,我们可以轻松计算旋转平移变换并观察其效果。
这些变换对于图像处理和计算机视觉任务非常有用,例如图像校正、目标跟踪和图像配准等。
通过灵活运用旋转和平移变换,我们可以提高图像处理的准确性和效率。
总结起来,通过使用OpenCV库中的函数和方法,我们可以方便地计算旋转平移变换,并在图像上观察到相应的效果。
这些变换在图像处理和计算机视觉中有着广泛的应用,可以帮助我们实现多种图像处理任务。
通过灵活运用旋转和平移变换,我们可以提高图像处理的效果和质量。
OpenCV实现常见的四种图像几何变换

OpenCV实现常见的四种图像⼏何变换⽬录准备图⽚1. 缩放 cv2.resize()⽅法2. 翻转 cv2.flip()⽅法3. 仿射变换 warpAffine()⽅法3.1 平移3.2 旋转3.3 倾斜4. 透视准备图⽚选择⼀张shape为(500,500,3)的梵⾼的《星⽉夜》以便⽰例。
1. 缩放 cv2.resize()⽅法cv2.resize(src, dsize, dst=None, fx=None, fy=None, interpolation=None)src 原图(的数组)dsize: 输出图像的⼤⼩格式:(a,b)。
设定dsize后就⽆需再设置fx和fyfx 可选参数⽔平⽅向缩放⽐fy 可选参数垂直⽅向缩放⽐fx和fy不同于dsize,fx和fy是各是⼀个⽐值,如设为2,则表⽰放⼤2倍,设为1/2则表⽰缩⼩到原来的1/2 import cv2img = cv2.imread("The_Starry_Night.jpg")dst1 = cv2.resize(img, (200, 200))dst2 = cv2.resize(img, (900, 900))cv2.imshow("img", img)cv2.imshow("dst1", dst1)cv2.imshow("dst2", dst2)cv2.waitKey()cv2.destroyAllWindows()执⾏结果如图所⽰,相⽐原图,图像得到了指定⼤⼩的缩⼩与放⼤。
使⽤fx和fy参数,则需要⼿动把dsize设为None。
import cv2img = cv2.imread("The_Starry_Night.jpg")# 将宽缩⼩到原来的1/3、⾼缩⼩到原来的1/2dst3 = cv2.resize(img, None, fx=1 / 3, fy=1 / 2)# 将宽⾼扩⼤2倍dst4 = cv2.resize(img, None, fx=2, fy=2)cv2.imshow("img", img)cv2.imshow("dst3", dst3)cv2.imshow("dst4", dst4)cv2.waitKey()cv2.destroyAllWindows()结果呈现:2. 翻转 cv2.flip()⽅法flip(src, flipCode, dst=None)src 图像(数组)flipCode 翻转代码。
opencv反射变换 -回复

opencv反射变换-回复在计算机视觉和图像处理领域,反射变换是一种常见的技术,它可以通过对图像进行变换来实现镜像、翻转和旋转等操作。
OpenCV是一个广泛应用于计算机视觉的开源库,提供了丰富的图像处理函数和工具。
在本文中,我们将深入探讨OpenCV中的反射变换,并逐步介绍如何使用它来实现各种图像处理效果。
在开始之前,我们先来了解一下反射变换的基本概念。
反射变换是一种二维空间中的几何变换,它通过改变图像的坐标来实现图像的镜像、翻转和旋转等效果。
通过在图像上定义一个中心点,我们可以将该中心点作为旋转和翻转的参考点,并根据需要进行坐标的变换。
在OpenCV中,我们可以使用cv2函数库中的函数来实现这些操作。
首先,我们来看一下如何实现图像的镜像效果。
镜像是一种沿着图像中心轴对称的效果,可以使图像在水平或者垂直方向上翻转。
在OpenCV中,可以使用cv2.flip函数来实现图像的镜像操作。
这个函数接受两个参数,第一个参数是要进行镜像操作的图像,第二个参数是一个整数,用来指定镜像操作的方向。
如果这个参数的值为0,表示在水平方向上进行镜像,如果值为1,表示在垂直方向上进行镜像。
下面是一个示例代码,演示如何使用cv2.flip函数实现镜像操作:pythonimport cv2# 读取图像image = cv2.imread('image.jpg')# 实现水平镜像horizontal_flip = cv2.flip(image, 0)cv2.imshow('Horizontal Flip', horizontal_flip)# 实现垂直镜像vertical_flip = cv2.flip(image, 1)cv2.imshow('Vertical Flip', vertical_flip)cv2.waitKey(0)cv2.destroyAllWindows()上面的代码首先使用cv2.imread函数读取一个图像,在这个例子中,我们将图像保存在名为image.jpg的文件中。
opencv坐标系和旋转角度定义

在计算机视觉和图像处理领域,OpenCV是一个广泛使用的开源计算机视觉库,它具有丰富的图像处理和计算机视觉算法。
在使用OpenCV进行图像处理时,经常会涉及到坐标系和旋转角度的定义,这些概念对于了解图像处理和计算机视觉算法非常重要。
本文将介绍OpenCV中坐标系和旋转角度的定义,希望对读者有所帮助。
一、坐标系定义在OpenCV中,常用的坐标系是以图像的左上角为原点(0,0),x轴向右为正方向,y轴向下为正方向。
这个坐标系与数学中常用的笛卡尔坐标系有所不同,需注意转换。
1.1 图像坐标系图像坐标系是一个以图像左上角为原点的2D坐标系,其中x轴向右为正方向,y轴向下为正方向。
在OpenCV中,图像的坐标系通常表示为(x,y),x表示列数,y表示行数。
1.2 世界坐标系世界坐标系是一个基于实际世界物体位置的坐标系,通常与相机坐标系相关联。
在使用OpenCV进行摄像机标定和三维重建时,会用到世界坐标系的概念。
二、旋转角度定义在图像处理和计算机视觉中,经常需要对图像进行旋转处理。
在OpenCV中,旋转角度的定义遵循数学中的正角度定义,即逆时针方向为正方向,顺时针方向为负方向。
2.1 顺时针旋转角度在OpenCV中,对图像进行顺时针旋转时,旋转角度为负值。
当需要将图像顺时针旋转90度时,旋转角度为-90度。
2.2 逆时针旋转角度对图像进行逆时针旋转时,旋转角度为正值。
当需要将图像逆时针旋转90度时,旋转角度为90度。
总结:在使用OpenCV进行图像处理和计算机视觉算法开发时,了解坐标系和旋转角度的定义是非常重要的。
本文介绍了OpenCV中常用的图像坐标系和世界坐标系的定义,以及旋转角度的定义。
希望本文对读者在学习和使用OpenCV时有所帮助。
以上就是本文的全部内容,谢谢阅读!在图像处理和计算机视觉中,我们经常会涉及到对图像进行旋转、平移、缩放等操作。
而要进行这些操作,我们首先需要了解图像的坐标系以及旋转角度的定义。
opencv仿射变换 宽高512绕中心逆时针旋转

opencv仿射变换宽高512绕中心逆时针旋转OpenCV是一款非常流行的开源计算机视觉库,能够提供一系列基础的图像处理和分析功能。
其中,仿射变换就是一种很重要的技术,可以将一幅图像进行旋转、缩放、平移等操作,以获得更好的视角或者处理结果。
本文将分步骤阐述如何进行基于OpenCV的仿射变换,以及如何实现将宽高512的图像绕中心逆时针旋转。
第一步:加载图像在进行任何图像处理操作之前,我们需要先加载一个待处理的图像。
在使用OpenCV中,可以使用imread函数加载图像,该函数的输入参数为图像的文件路径,输出参数是一个Mat矩阵对象,用于存储图像数据。
例如下面的代码所示:Mat img = imread("test.jpg");这里我们假设test.jpg是一张待处理的图像。
第二步:实现仿射变换旋转和缩放是仿射变换的两种常见操作。
在OpenCV中,可以使用getRotationMatrix2D函数来获取一个旋转矩阵,然后使用warpAffine函数来应用该矩阵进行旋转。
具体的代码如下:double angle = 30.0; // 逆时针旋转30度double scale = 1.0; // 不进行缩放Size img_size = img.size(); // 获取图像大小Mat M = getRotationMatrix2D(Point2f(img_size.width/2,img_size.height/2), angle, scale); // 获取旋转矩阵Mat result; // 存储处理结果warpAffine(img, result, M, img_size);这里我们假设要对图像进行逆时针旋转30度,scale参数为1.0表示不进行缩放,img_size是读入图像的大小。
第三步:输出结果最后,我们需要将结果输出到文件或者显示出来。
如果要将结果显示出来,可以使用imshow函数,它的输入参数为窗口名和图像的Mat对象,用于显示图像。
opencv实现图像旋转效果

opencv实现图像旋转效果本⽂实例为⼤家分享了opencv实现图像旋转效果的具体代码,供⼤家参考,具体内容如下图像旋转:在opencv中⾸先根据旋转⾓度和中⼼获取旋转矩阵,然后根据旋转矩阵进⾏变换参数:实现代码:import numpy as npimport cv2 as cvimport matplotlib.pyplot as plt# 中⽂显⽰配置plt.rcParams['font.sans-serif']=['SimHei'] # ⽤来正常显⽰中⽂标签plt.rcParams['axes.unicode_minus']=False # ⽤来正常显⽰负号# 载⼊图⽚img0 = cv.imread("img/img1.jpeg")rows, cols = img0.shape[:2]# 图像旋转# ⽣成旋转矩阵:旋转中⼼,旋转⾓度,缩放⽐例M = cv.getRotationMatrix2D((cols/2,rows/2),90,1)# 进⾏旋转变换dst = cv.warpAffine(img0,M,(cols,rows))# 图像展⽰fig, axes = plt.subplots(nrows=1,ncols=2,figsize=(10,8),dpi=100)axes[0].imshow(img0[:,:,::-1])axes[0].set_title("原图")axes[1].imshow(dst[:,:,::-1])axes[1].set_title("旋转后结果")plt.show()运⾏结果:以上就是本⽂的全部内容,希望对⼤家的学习有所帮助,也希望⼤家多多⽀持。
基于OpenCV和C++实现图片旋转

基于OpenCV和C++实现图⽚旋转图⽚旋转,本质上是对旋转后的图⽚中每个像素点计算在原图的位置。
然后照搬过来就好。
(多说⼀句,如果计算出来在原图中的位置不是整数⽽是⼩数,因为像素点个数都是整数,就需要⼩数到整数的转换。
这个转换过程是有讲究的,需要⽤到插值:最近邻插值、双线性插值等等。
这⾥我使⽤的是最简单的最近邻插值,即对⼩数四舍五⼊成整数,C/C++ 实现四舍五⼊见这⾥)图形图像课上⼀般会介绍旋转变换矩阵,其中 t 为需要旋转的⾓度,[x'; y']是变换后坐标(其中分号表⽰上下关系):即表⽰为:[x'; y'] = [cos(t) sin(t); -sin(t) cos(t)][x; y]因为我个⼈兴趣爱好(放P就是⽼师逼的。
),不允许使⽤ OpenCV 封装好的旋转函数。
只能⾃⼰实现,我开始的想法是:先求变换矩阵逆矩阵,然后将⼀张全⿊图中每个点⼀⼀对应插值到原图中。
结果发现转换后图⽚全⿊了……后来发现原点设置不对。
⽤OpenCV中的 Mat格式存储(或⼆维数组)的图⽚,原点在左上⾓。
但是想要实现的旋转原点在图⽚中⼼。
同时, Mat格式存储(或⼆维数组)的坐标系中 y轴正⽅向向下。
这样⼈类视觉上的顺时针旋转,在⼆维数组的坐标系中是逆时针旋转。
最重要的⼀点,也是⼆维数组操作中极易忽略的⼀点:数组操作的是数组下标,不是坐标系(数组的⾏数 rows 是矩形的宽width ,列数 cols 是矩形的长 length )。
⽐如坐标系(此时为了更贴近数组布局,我们假设 y 轴坐标系是向下的)中,矩形顶点是:但是在数组中,因为是⾏优先,所以四个点的下标取值为:有没有发现,两种坐标是相反的!总结下来,我们的图⽚旋转需要注意以下⼏点:1. 变换后图⽚中的每个像素点(i; j),需要平移到相对旋转中⼼的新坐标,即(i - Mat.rows/2; j - Mat.cols/2)。
计算完成之后,需要再次还原到相对左上⾓原点的旧坐标;2. 本来需要变换后图⽚乘以原图变换矩阵的逆矩阵对应到原图中坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
opencv 图像翻转、旋转转自:/watkinsong/article/details/91896491.图像左右翻转、翻转90度opencv中并没有直接封装图像旋转任意角度的函数,一般我们可以使用仿射变换获得旋转后的图像,这时候可以进行任意角度的旋转,但是如果我们需要将图像旋转90度,例如只是对图像进行左右翻转,或者旋转90度将图像放倒,那么如果还使用仿射变换,显得有些不是很简单,有点过于复杂。
实际上可以使用求转置矩阵的方式将图像旋转90度,然后可以沿着指定的坐标轴对旋转后的图像进行翻转变化。
使用transpose(src, dst);对目标图像进行转置变换,可以将垂直的图像变为水平放置。
然后使用flip()函数对图像进行翻转。
整个过程非常简单,可以看下下面的代码就非常清晰的了解了。
// ImageFlip.cpp : Defines the entry point for the console application.//#include "stdafx.h"#include "opencv/cv.h"#include "opencv/highgui.h"#include "stdio.h"#include "iostream"using namespace cv;using namespace std;int _tmain(int argc, _TCHAR* argv[]) {Mat src = imread("lena.jpg");Mat dst;transpose(src, dst);Mat dst2;flip(dst, dst2, 1); // flip by y axis Mat dst3;flip(dst, dst3, 0); // flip by x axis Mat dst4;flip(dst, dst4, -1); // flip by both axises imshow("src", src);imshow("dst", dst);imshow("dst2", dst2);imshow("dst3", dst3);imshow("dst4", dst4); cvWaitKey();return 0;}实验结果:原始图像:转置以后:flip(dst, dst2, 1); // flip by y axis2、任意角度旋转、同时缩放(输出图像大小与输入图像大小相同,容易造成图像不全)下面这份代码用于实现对图像的缩放与旋转。
OpenCV版本:2.4.2// 图像旋转与缩放// Author:// Blog:/icvpr#include <iostream>#include <vector>#include <opencv2/opencv.hpp>int main(int argc, char** argv){cv::Mat image = cv::imread("../test.jpg");if (image.empty()){std::cout<<"read imagefailure"<<std::endl;return -1;}cv::Point2f center = cv::Point2f(image.cols / 2, image.rows / 2); // 旋转中心double angle = 30; // 旋转角度double scale = 0.5; // 缩放尺度cv::Mat rotateMat;rotateMat = cv::getRotationMatrix2D(center, angle, scale);cv::Mat rotateImg;cv::warpAffine(image, rotateImg, rotateMat, image.size());cv::imwrite("../rotate.jpg", rotateImg);return 0;} // 图像旋转与缩放// Author:// Blog:/icvpr #include<iostream>#include <vector>#include <opencv2/opencv.hpp>int main(int argc, char** argv){ cv::Mat image = cv::imread("../test.jpg");if (image.empty()){std::cout<<"read image failure"<<std::endl;return -1;} cv::Point2f center = cv::Point2f(image.cols / 2, image.rows / 2); // 旋转中心double angle = 30; // 旋转角度double scale = 0.5; // 缩放尺度cv::Mat rotateMat;rotateMat = cv::getRotationMatrix2D(center, angle, scale); cv::Mat rotateImg;cv::warpAffine(image, rotateImg, rotateMat,image.size()); cv::imwrite("../rotate.jpg", rotateImg);return 0;}原图:缩放:旋转:旋转+缩放3.图像旋转、缩放(缩放后图像完整的进行显示)旋转变换公式的推导:如下图,在2维坐标上,有一点p(x, y) , 直线op的长度为r, 直线op和x轴的正向的夹角为a。
直线op围绕原点做逆时针方向b度的旋转,到达p’(s,t) 则有s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b)(1.1)t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2) 其中x =r cos(a) , y = r sin(a)代入(1.1), (1.2) ,s = x cos(b) – y sin(b)(1.3)t = x sin(b) + y cos(b) (1.4)用行列式表示如下用到的一些OpenCV中的函数:(1) CvMat*cv2DRotationMatrix(CvPoint2D32f center, double angle, doublescale, CvMat*map_matrix);Mat getRotationMatrix2D(Point2f center, doubleangle, double scale);说明:计算旋转加缩放的仿射矩阵参数:center:旋转中心angle:旋转度数,正值表示逆时针旋转。
scale:各方向同性的缩放尺度map_matrix:输出参数,仿射变换矩阵,浮点型2*3矩阵返回值:仿射变换矩阵注意:默认的变换是以相反的顺序进行的,即从目标到源。
对于目标图像中的任一点(x,y),先计算出它在源图像中的坐标,再将此点的像素值拷贝到目标图像中,所以计算出的变换矩阵是从目标到源的变换矩阵。
例如逆时针旋转30度,不做缩放,计算出的变换矩阵为:(2) void cvWarpAffine(const CvArr* src,CvArr* dst, const CvMat*map_matrix,intflags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0));void warpAffine(InputArray src, OutputArray dst, InputArray M,Sizedsize, int flags=INTER_LINEAR,int borderMode = BORDER_CONSTANT,constScalar& borderValue=Scalar() );说明:对图像做仿射变换参数:M:输入参数,2*3的仿射变换矩阵dsize:输出图像的尺寸flags:差值方法,若设置WARP_INVERSE_MAP标识,指明M是目的到源的变换。
borderMode:边界处理方法注意:当设置标志位WARP_INVERSE_MAP时,目标图像的计算公式为:否则,先调用invertAffineTransform()计算出M的逆仿射变换M’,然后将M’带入以上公式进行变换。
[cpp] viewplaincopy print?#include<iostream>#include<opencv2/imgproc/imgproc.hpp>#include<opencv2/highgui/highgui.hpp>using namespace std;using namespace cv;#define SCALE 0.5 //缩放比例int main(){Mat src = imread("pic3.png");Mat dst;//输出图像int angle = 30;//旋转角度(正值表示逆时针旋转)int length;//输出图像的宽度或高度//为了保证无论如何旋转都能放下,输出图像的长和宽都设为输入图像对角线长度乘以SCALE//但如果是缩小(SCALE<=1),这样会导致临时图像中放不下原图,所以对于所有缩小的情况,输出图像和临时图像的长宽都设为原图的对角线长度if(SCALE <= 1)length = sqrt(src.cols*src.cols +src.rows*src.rows);elselength = sqrt(src.cols*src.cols + src.rows*src.rows) * SCALE;//建立临时图像,长宽都是源图像的对角线长度,将源图像复制到临时图像的中心后再变换Mat tempImg(length,length,src.type());//临时图像,大小和输出图像一样大int ROI_x = length/2 - src.cols/2;//ROI矩形左上角的x 坐标int ROI_y = length/2 - src.rows/2;//ROI矩形左上角的y 坐标Rect ROIRect(ROI_x,ROI_y,src.cols,src.rows);//ROI 矩形Mat tempImgROI2(tempImg,ROIRect);//tempImg的中间部分src.copyTo(tempImgROI2);//将原图复制到tempImg的中心Point2f center(length/2,length/2);//旋转中心Mat M = getRotationMatrix2D(center,angle,SCALE);//计算旋转的仿射变换矩阵//输出看看算出的矩阵是什么cout<<"变换矩阵:"<<endl;cout<<M.at<double>(0,0)<<","<<M.at<d ouble>(0,1)<<","<<M.at<double>(0,2)<< ;","<<endl;cout<<M.at<double>(1,0)<<","<<M.at<double>(1,1)<<","<<M.at<double>(1,2)<< ;","<<endl;warpAffine(tempImg,dst,M,Size(length,length));//仿射变换//显示imshow("src",src);imshow("tempImg",tempImg);imshow("dst",dst);waitKey(0);return 0;} #include<iostream>#include<opencv2/imgproc/imgproc.hpp>#include<opencv2/highgui/highgui.hpp>using namespace std;using namespace cv;#define SCALE 0.5 //缩放比例int main(){Mat src = imread("pic3.png");Mat dst;//输出图像int angle = 30;//旋转角度(正值表示逆时针旋转) int length;//输出图像的宽度或高度//为了保证无论如何旋转都能放下,输出图像的长和宽都设为输入图像对角线长度乘以SCALE//但如果是缩小(SCALE<=1),这样会导致临时图像中放不下原图,所以对于所有缩小的情况,输出图像和临时图像的长宽都设为原图的对角线长度if(SCALE <= 1)length = sqrt(src.cols*src.cols +src.rows*src.rows);elselength = sqrt(src.cols*src.cols + src.rows*src.rows) * SCALE;//建立临时图像,长宽都是源图像的对角线长度,将源图像复制到临时图像的中心后再变换Mat tempImg(length,length,src.type());//临时图像,大小和输出图像一样大int ROI_x = length/2 - src.cols/2;//ROI矩形左上角的x 坐标int ROI_y = length/2 - src.rows/2;//ROI矩形左上角的y 坐标Rect ROIRect(ROI_x,ROI_y,src.cols,src.rows);//ROI矩形Mat tempImgROI2(tempImg,ROIRect);//tempImg的中间部分src.copyTo(tempImgROI2);//将原图复制到tempImg的中心Point2f center(length/2,length/2);//旋转中心Mat M = getRotationMatrix2D(center,angle,SCALE);//计算旋转的仿射变换矩阵//输出看看算出的矩阵是什么cout<<"变换矩阵:"<<endl;cout<<M.at<double>(0,0)<<","<<M.at<d ouble>(0,1)<<","<<M.at<double>(0,2)<< ;","<<endl;cout<<M.at<double>(1,0)<<","<<M.at<d ouble>(1,1)<<","<<M.at<double>(1,2)<< ;","<<endl;warpAffine(tempImg,dst,M,Size(length,length));//仿射变换//显示imshow("src",src);imshow("tempImg",tempImg);imshow("dst",dst); waitKey(0);return 0;}效果图:原图临时图像1结果1临时图像2结果2。