MPC8377硬件环境下vxworks仿真的建立过程
vxworks模拟器利用指南
约定文档中提到的途径,均相关于ROS5(M)目录而言。
1.编译模拟器1.1.大体原理为了节省时刻,模拟器不像设备那样编译一个完整的vxworks镜像文件,而是把系统和模块分开。
系统寄存在vxsim\vxWorks文件中,该文件由系统组负责保护。
模块那么编译在vxsim\文件中,那个文件由各自编译。
为了编译明白得,咱们能够和Windows系统做一个对照,vxworks文件相当于Windows系统,.out文件相当于一个exe文件。
咱们开发一个exe文件的时候,并非需要编译整个Windows系统。
因此咱们只需要编译出文件即可。
的编译进程如下:1、编译vxsim目录下的所有.c文件,生成对应的.o文件2、链接步骤1生成的.o文件和lib\gnu\vxworks\SIMNT、publib\gnu\vxworks\SIMNT目录下的所有.a文件。
若是两个目录有同名文件,那么利用lib目录下的。
1.2.编译当前模拟器的编译再也不利用Workbench工程,完全利用批处置common\进行,该批处置应该用VxWorks Development Shell运行,而不是cmd。
下面描述都假设是在common目录下。
从那能看出,编译需要编译vxsim目录下的.c文件和编译库文件(.a文件)。
其中要紧的工作是编译库文件。
1.2.1.库文件编译编译一个库文件的方式是libname,其中libname指的是模块的名称,在module 目录下应该有一个文件。
比如:最终生成的库文件是寄存在lib\gnu\vxworks\SIMNT目录下,也即当前编译的库文件优先于publib的库文件。
一样而言,公共的库文件(rdvp/support/rcis/simssp)在publib目录下已经存在稳固的版本,不用另外编译。
各自只需要编译自己当前开发/调试的模块即可。
ROS5和ROS5M编译库文件略有不同。
ROS5M下的代码是全的,各个组件能够正常编译,比如需要编译命令行库文件,只需要运行cli即可。
vxWorks开发环境构建步骤及开发资源
vxWorks开发环境构建步骤及开发资源技创科技(Technique Innovator Inc.) 一、Tornado集成开发环境构成Tornado是集成开发环境的名称,主要由帮助及参考文档、操作系统vxWorks、开发工具(编译器、调试器、编辑器、target server等,据统计,挂接在Tornado下的可选工具和第三方有数百个)等三部分构成,分别对应三个目录:i.docs/ 所有文档都集中在该目录中, books.html是根索引,入门级开发请务必查看以下文档:●如果要熟悉使用界面及Tornado使用、创建工程,请参考:Tornado用户手册及Tornado集成开发环境的HELP->content调出来的联机帮助文档;●vxWorks的编译是使用标准GNU Makefile来编译连接的,要了解Makefile语法请参考”GNU Make”;具体的Make rules存放在target/h/make/目录下。
●如何调试?请参考“Debugging with GDB”●vxWorks构成、特点及kernel,编程等:请参考:VxWorks Programmer's Guide,系统调用、库函数接口标准等,请参考:VxWorks Reference Manual●有关BSP(board support package)的构成、初始化、底层驱动等,请参考“BSPReference”●网络应用编程指南(socket编程): “VxWorks Network Programmer's Guide”ii.host/ 该部分存放主机端(开发机)的工具,如Tornado.exe,make.exe,编译器、调试器及TCL命令解释器等等,开发中要用到的工具都存放在目录host\x86-win32\bin 下,部分命令是.exe文件,部分是.bat的,其中有torvars.bat文件,是设置Tornado集成开发环境的环境变量用的,在使用其他工具前,要运行它设置正确的环境变量及可执行文件搜索路径。
VxWorks调试环境构建全过程
VxWorks 调试环境构建全过程设定VxWorks开发环境如下:宿主机端(Host):普通PC机一台;Tornado2.0 IDE;BSP为x86 Pentium3架构。
目标机(Target): x86 Pentium3 CPU, 网卡为intel8255x系列(标识:fei)。
主机和目标机通过网线连接,制作步骤详述如下(为了图文一致,以下假设目标机BSP文件夹名为:pcPentium):1 .修改配置文件我们要修改编译VxWorks的配置头文件Config.h中定义的一些参数,使编译出来的系统引导程序和VxWorks的映象符合我们的要求。
(1)定位到目录C:\tornado2.2\target\config\pcPentium并打开该目录下Config.h文件;(2)查找到定义DEFAULT_BOOT_LINE宏的地方,修改预处理条件CPU == PENTIUM3分支下的定义如下:#define DEFAULT_BOOT_LINE \"fei(0,0)host: vxWorks h=192.168.80.169 e=192.168.80.254 u=target pw=target tn=target"其中:∙fei(0,0)指定了使用第0个网卡和第0个处理器,fei这个标识代表intel8255x系列100M网卡,若目标机为intel8255x系列网卡,则标识为gei;∙host指定你的主机的名字,使用host就可以;∙vxWorks指定了VxWorks映象下载的完整路径(后面会有说明);∙h=192.168.80.169是宿主机的IP地址,可以根据实际情况修改;∙e=192.168.80.254是目标机的IP地址,可以根据实际情况修改;∙u=target指定了FTP服务器的用户名,这个FTP就是用来下载VxWorks 映象的;∙pw=target是FTP服务器与用户名target对应的密码;∙tn=target指定目标机的名字,任意指定即可。
VxWorks操作系统的CompactPCI测试仿真系统
VxWorks操作系统的CompactPCI测试仿真系统
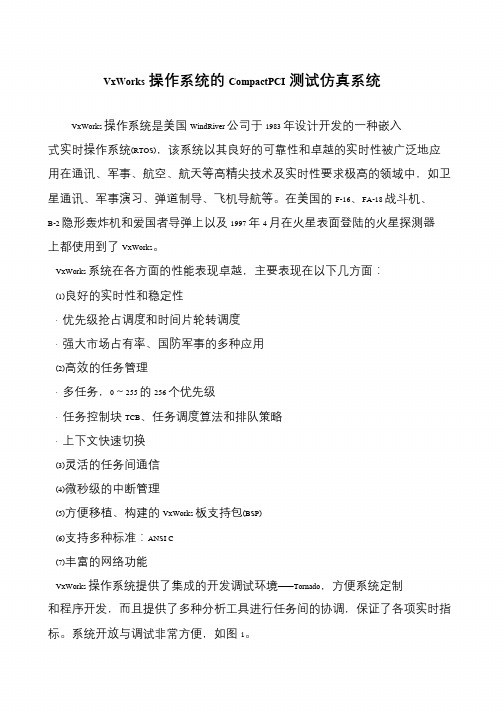
VxWorks 操作系统是美国WindRiver 公司于1983 年设计开发的一种嵌入式实时操作系统(RTOS),该系统以其良好的可靠性和卓越的实时性被广泛地应用在通讯、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上以及1997 年4 月在火星表面登陆的火星探测器上都使用到了VxWorks。
VxWorks 系统在各方面的性能表现卓越,主要表现在以下几方面:
(1)良好的实时性和稳定性
·优先级抢占调度和时间片轮转调度
·强大市场占有率、国防军事的多种应用
(2)高效的任务管理
·多任务,0~255 的256 个优先级
·任务控制块TCB、任务调度算法和排队策略
·上下文快速切换
(3)灵活的任务间通信
(4)微秒级的中断管理
(5)方便移植、构建的VxWorks 板支持包(BSP)
(6)支持多种标准:ANSI C
(7)丰富的网络功能
VxWorks 操作系统提供了集成的开发调试环境——Tornado,方便系统定制和程序开发,而且提供了多种分析工具进行任务间的协调,保证了各项实时指标。
系统开放与调试非常方便,如图1。
VxWorks映像及启动顺序与预内核

romInit()函数
3,冷启动和热启动 VxWorks映像启动类型分为冷启动和热启动两种: a) 冷启动。所谓冷启动是指硬件环境通过加电启动。在 romInit()函数中需要保存系统启动类型,启动类型宏定 义为BOOT_COLD。 b) 热启动。所谓热启动是通过调用reboot(),Ctrl+X或异 常中断重新启动目标机系统。
VxWorks映像类型
2,基于ROM的映像类型: 基于ROM型映像在执行前首先把自己从ROM 或Flash中装载到RAM中。这类型的映像通常在启 动阶段比较慢,但在执行阶段比ROM驻留型映像要 快。
VxWorks映像类型
2,基于ROM的映像类型:
VxWorks映像类型
2,基于ROM的映像类型: 该映象根据是否被压缩又可分为: 基于ROM的未压缩的VxWorks映象,可直接从 ROM拷贝到RAM中 基于ROM的压缩的VxWorks映象,这种映象主要 是为了节约BOOT空间,再从ROM拷贝到RAM的 过程中需要解压缩,因此与上述未压缩的映象相 比,它的引导过程相对较慢,但两者在RAM中的 运行速度是一样的。
VxWorks映像类型
1,可加载的映像类型: 这是一种运行于RAM的VxWorks映象。它不包含搬移 程序,需要借助于一些外部的程序如bootRom才能加载到 RAM的低端RAM_LOW_ADRS地址处。这是缺省的开发映 象。
VxWorks映像类型
1,可加载的映像类型: 在开发的初期阶段,用户可以根据需要添加或删除一 些VxWorks组件,生成自己的可加载的VxWorks映象,存 放在开发主机的某个目录下。目标板上电后,由烧结在 BOOT中的起始引导程序将BOOT中的ROM引导程序拷贝到 RAM的高端地址RAM_HIGH_ADRS处,并跳转至该地址 执行ROM引导程序,配置好所选的加载方式,将指定的主 机目录下的可加载的VxWorks映象下载到目标板的RAM地 址RAM_LOW_ADRS处,并跳转到此处执行。
VxWorks开发教程

任务删除
使用`taskDelete()`函数删除 指定任务,释放任务所占用的
资源。
任务状态转换
通过`taskSuspend()`和 `taskResume()`函数实现任务
的挂起与恢复,通过 `taskDelay()`函数实现任务延
时。
任务优先级调度策略
优先级抢占式调度
01
高优先级任务可抢占低优先级任务的执行,确保关键任务得到
TCP/IP通信实例分析
通过分析一个简单的基于TCP/IP协议栈的通信实例,加深对网络通信编程的理解和掌握。
无线通信模块集成与调试经验分享
01
02
无线通信模块概述
介绍常见的无线通信模块类型及其特点, 如Wi-Fi模块、蓝牙模块、ZigBee模块 等。
模块集成步骤与注意 事项
详细讲解无线通信模块与VxWorks系 统的集成步骤,包括硬件连接、驱动程 序开发、协议栈配置等,并分享一些实 用的调试技巧和经验。
套接字编程基本流程
包括创建套接字、绑定地址、监听连接、接受连接、发送和接收数据等步骤。
基于TCP/IP协议栈网络通信实现
TCP/IP协议栈概述
介绍TCP/IP协议栈的基本概念和层次结构,以及各层的主要功能和协议。
网络通信编程接口
讲解VxWorks提供的网络通信编程接口,如socket()、bind()、listen()、accept()、send()、recv()等函数 的使用方法和注意事项。
中断控制器识别中断源,并将其传递 给CPU。
中断类型及响应过程
3. 中断处理
CPU保存当前执行上下文,跳转到中 断处理程序执行。
4. 中断返回
中断处理程序执行完毕后,CPU恢复保 存的上下文并继续执行原程序。
VxWorks系统中映像及其加载过程
A. 最少化的系统初始化BootRom的启动过程:文件romInit.s中的romInit()→文件bootInit.c中的romStart()→文件bootConfig.c中的[usrInit()→usrRoot()](其中usrInit()和usrRoot()函数还调用了其他很多初始化的函数)注意:与VxWorks image的区别在于一个BootRom调用bootConfig.c,而VxWorks调用usrConfig.c, bootConfig.c主要完成BootRom 映像的初始化,而usrConfig.c主要完成VxWorks映像的初始化。
图表4 BootRom的加载过程B. 用BootRom加载Loadable 映像的启动过程为:文件romInit.s中的romInit()→文件bootInit.c中的romStart()→文件sysALib.s中的sysInit()[初始化RAM]→文件usrConfig.c中的[usrInit()→usrRoot()](其中usrInit()和usrRoot()函数还调用了其他很多初始化的函数)图表5 BootRom加载Lodable 映像的过程Rom-Based image(基于ROM的VxWorks映像)前面说了这种类型映像不需要BootRom的支持,那么它(下面所说的驻留ROM的映像也是)融合了BootRom的引导功能,它在ROM中启动,然后把VxWorks 拷贝到RAM中去运行。
其加载和引导VxWorks映像的过程是:文件romInit.s中的romInit()→文件bootInit.c中的romStart()→文件usrConfig.c中的[usrInit()→usrRoot()](其中usrInit()和usrRoot()函数还调用了其他很多初始化的函数)图表6基于ROM的VxWorks映像的加载过程Rom_Resident image(驻留ROM的VxWorks映像)在ROM中启动,并在运行VxWorks。
vxWorks开发环境构建步骤及开发资源
vxWorks开发环境构建步骤及开发资源技创科技(Technique Innovator Inc.) 一、Tornado集成开发环境构成Tornado是集成开发环境的名称,主要由帮助及参考文档、操作系统vxWorks、开发工具(编译器、调试器、编辑器、target server等,据统计,挂接在Tornado下的可选工具和第三方有数百个)等三部分构成,分别对应三个目录:i.docs/ 所有文档都集中在该目录中, books.html是根索引,入门级开发请务必查看以下文档:●如果要熟悉使用界面及Tornado使用、创建工程,请参考:Tornado用户手册及Tornado集成开发环境的HELP->content调出来的联机帮助文档;●vxWorks的编译是使用标准GNU Makefile来编译连接的,要了解Makefile语法请参考”GNU Make”;具体的Make rules存放在target/h/make/目录下。
●如何调试?请参考“Debugging with GDB”●vxWorks构成、特点及kernel,编程等:请参考:VxWorks Programmer's Guide,系统调用、库函数接口标准等,请参考:VxWorks Reference Manual●有关BSP(board support package)的构成、初始化、底层驱动等,请参考“BSPReference”●网络应用编程指南(socket编程): “VxWorks Network Programmer's Guide”ii.host/ 该部分存放主机端(开发机)的工具,如Tornado.exe,make.exe,编译器、调试器及TCL命令解释器等等,开发中要用到的工具都存放在目录host\x86-win32\bin 下,部分命令是.exe文件,部分是.bat的,其中有torvars.bat文件,是设置Tornado集成开发环境的环境变量用的,在使用其他工具前,要运行它设置正确的环境变量及可执行文件搜索路径。
VxWorks开发教程
5.1.1 串口概述...................................................... 71 5.1.2 串口操作...................................................... 71
集成开发环境是一种更直观的自动化环境使得不同使用经验的开发人员可以快速方便地在vxworks上面开发应用21安装开发环境22tornado集成开发环境简述tornado集成开发环境使用户创建和管理工程建立和管理宿主机与目标机之间的通信以及运行调试和监控vxworks应用变得非常方便
第一章 Wind River ........................................................... 4 1.1 风河系统公司简介 ..................................................... 4 1.2 实时操作系统 Vxworks 简介............................................. 4
第四章 驱动实验 ............................................................ 35 WindML 3.0.3 开发....................................................... 35 4.1、WindML 简介 ........................................................ 35 4.2、安装和配置......................................................... 39 4.3、WindML 体系 ........................................................ 39 4.4、WindML 开发流程简介 ................................................ 40 4.5、UPTECH2410 的 LCD 开发流程详解 ...................................... 41 4.5.1 WindML 的 BSP 修改 ............................................. 41 4.5.2 LCD 配置文件的建立 ............................................ 44 4.5.3 LCD 驱动程序开发 .............................................. 51 4.6、WindML 例程分析 .................................................... 57 4.6.1 wexbasic 实例分析 ............................................. 57 4.6.2 ugldemo 实例分析 .............................................. 67 4.7、2410 LCD WindML 软件使用方法 ....................................... 70
VxWorks基础及开发实例-VxSim软件仿真实例

1 VxWorks软件仿真实验集成仿真工具(VxSim)是一个软件原型仿真器,主要是使开发者在无实际目标硬件情况下,先进行原型级应用程序的开发,包括网络设计和基于多处理器的设计。
VxSim还可使开发者在开发周期中较早地进行大部分的应用软件测试,从而能够以较小的代价纠正错误。
本实验的目的是使读者在不使用实际目标硬件的情况下,了解VxWorks软件仿真工具VxSim 的使用方法,并了解Tornado中各种辅助调试工具的使用方法。
1.1 编写、编译程序首先参照下面的步骤建立一个基于VxSim的工程:1.新建一个可启动的工程demoTornado采用工作区(Workspace)和工程(Project)的模式来管理应用程序,一个工程可以包含源代码文件以及与该工程相关的设置信息等;而工作区就好比一个容器,可以容纳多个工程。
选择File→New Project来启动新工程的创建过程,如图1-2所示。
创建工程时有两种不同类型的工程可供选择:可启动的工程(a bootable vxWorks image)和可下载的工程(downloadable application modules)。
图1-2 创建新工程可启动的工程:是一个链接到VxWorks映象的应用程序。
该工程中不仅包括应用程序的代码,还包括VxWorks内核代码。
在工程管理器中可以非常地添加或删除一些内核组件,(如操作系统中的ANSI C组件和POSIX组件等),从而调整VxWorks内核的特征。
通过组件的添加或删除,一方面可根据需要调整VxWorks内核的代码大小(嵌入式系统的资源都是非常有限的,保持内核的高度精简很必要);另一方面还可保证整个系统运行所需的组件都包含在所生成的目标代码中。
当目标机启动后,该应用程序会被自动加载且运行。
图1-3 输入新建工程的详细信息可下载的工程:是指该工程所编译的目标代码是一种可重定位的代码。
在一个可下载的工程中,可以包含多个可重定位的模块。
MPC8377硬件环境下vxworks仿真的建立过程
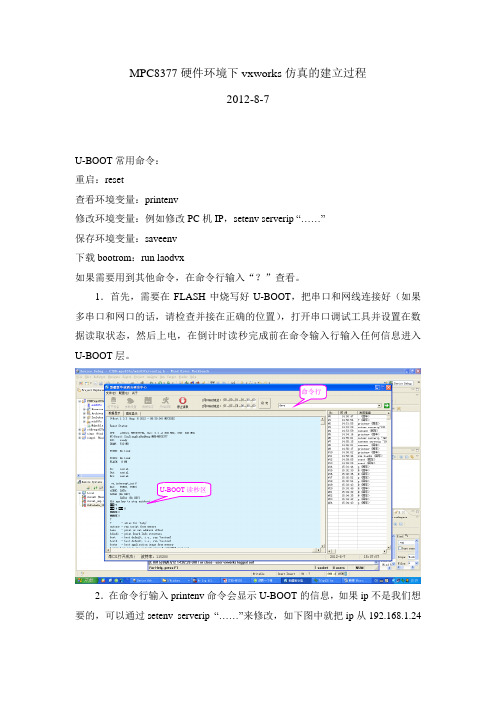
MPC8377硬件环境下vxworks仿真的建立过程2012-8-7U-BOOT常用命令:重启:reset查看环境变量:printenv修改环境变量:例如修改PC机IP,setenv serverip “……”保存环境变量:saveenv下载bootrom:run laodvx如果需要用到其他命令,在命令行输入“?”查看。
1.首先,需要在FLASH中烧写好U-BOOT,把串口和网线连接好(如果多串口和网口的话,请检查并接在正确的位置),打开串口调试工具并设置在数据读取状态,然后上电,在倒计时读秒完成前在命令输入行输入任何信息进入U-BOOT层。
命令行U-BOOT读秒区2.在命令行输入printenv命令会显示U-BOOT的信息,如果ip不是我们想要的,可以通过setenv serverip “……”来修改,如下图中就把ip从192.168.1.24改为192.168.1.43,修改完成后需要saveenv,然后reset,整个修改完成。
Printenv命令后的ip信息Setenv serverip ”192.168.1.43”后的结果3.下载bootrom。
先找到vxworks编译好的bootrom.bin文件,例如:本PC 上的路径C:\WindRiver-GPPVE-3.6-PPC-Eval\vxworks-6.6\target\config\mds837x,如下图。
需要的bootrom文件把bootrom复制到tftp软件所在的位置,如下图。
放置好的bootrom文件然后启动tftp软件,并在命令行输入:run loadvx,成功后如下图,至此bootrom 下载完毕。
下载成功后tftp显示信息4.Vxworks下载。
首先启动Vxworks6.6自带的ftp server,并配置好登陆用户和密码以及相关设置,主要有两部分设置,如下图。
用户配置界面Logging设置界面vxworks读秒完成前,在命令行输入任意信息,进入vxworks boot,输入“P”,显示vxworks相关信息,输入“@”,通过网络加载vxworks映像文件,输入“?”,可以显示所有的命令,如下图。
vxworks开发环境

基于Vxworks开发,一般都使用WindRiver work bench。
我使用的是WindRiver workbench3.0 。
下面来介绍一下如何使用WindRiver workbench。
如何安装就不详细说了,在win7和xp上都可以很容易的安装成功,但是注意在选择key的时候,那是一个.txt的文件。
第一步:建立工程第二步:第三步:选择Deselect All,然后根据你用的芯片来选择合适,这个主要用来生成.out文件第四步:右键点击所建立的工程,选择Properties,主要是为了配置一些参数。
第五步:在Build Tools 中选择Command 在最后加上-mlongcall,不加的话上板之后可能会出现乱码。
第六步:写好代码之后直接Build就是了。
注:按照上面的步骤我们只是建立好了工程,代码可以自己用uedit,Notepad++,sourceinsight等编辑好之后,将所有代码文件都拷贝到该工程所在的文件夹中,在第六步的图中,选择Build Project 后面的Refresh就可以加代码加到工程了。
然后直接Build。
分类: Vxworks环境开发WindRiver WorkBench 3.2 网卡以及串口调试作者:LazyGunner | 出处:博客园 | 2011/12/7 14:24:07 | 阅读16次近来想在MPC8377开发板上挂WDB调试Kernel Task。
使用网卡调试相当顺利,可是无奈的是开发的是网络设备,此开发板上的两张网卡都需要使用,所以只能考虑使用串口来调试。
可是一换到串口就出现问题,网上找资料真是找疯了也找不到,不过还是在媳妇的鼓励下硬着头皮,咬着牙给搞定了。
言归正传,下面分别说一下两种调试方法:一.网卡调试(WDB END driver connection)1.首先打开Kernel Configuration2.打开developmeng tool com p one nts->WDB agent components->WDB agent services选择你需要的模块,我这里为了省事,就全选了3.之后再在WDB agent components->select WDB connection选项卡下面选择需要使用的连接方式,这里我们先选通过网卡连接即WDB END driver connection这里需要注意的是IP address,与后面设置的要一致。
VxWorks系统的映像及其装载过程解析
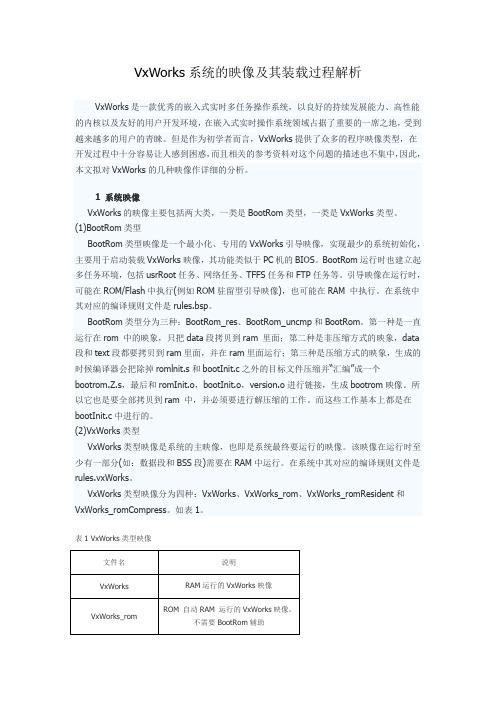
VxWorks系统的映像及其装载过程解析VxWorks是一款优秀的嵌入式实时多任务操作系统,以良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据了重要的一席之地,受到越来越多的用户的青睐。
但是作为初学者而言,VxWorks提供了众多的程序映像类型,在开发过程中十分容易让人感到困惑,而且相关的参考资料对这个问题的描述也不集中,因此,本文拟对VxWorks的几种映像作详细的分析。
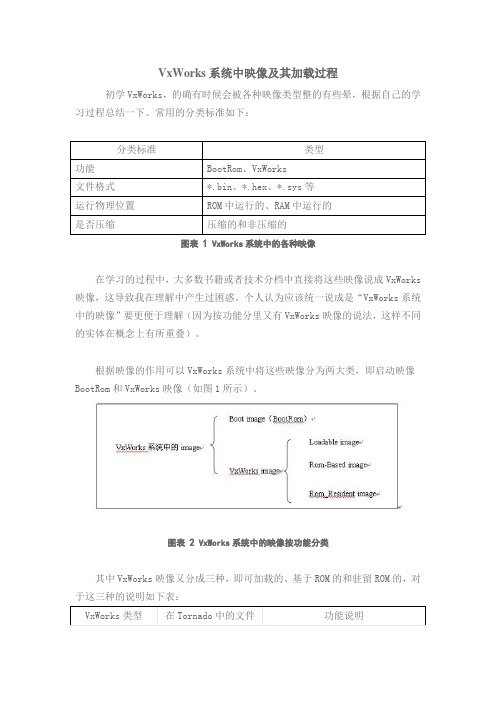
1 系统映像VxWorks的映像主要包括两大类,一类是BootRom类型,一类是VxWorks类型。
(1)BootRom类型BootRom类型映像是一个最小化、专用的VxWorks引导映像,实现最少的系统初始化,主要用于启动装载VxWorks映像,其功能类似于PC机的BIOS。
BootRom运行时也建立起多任务环境,包括usrRoot任务、网络任务、TFFS任务和FTP任务等。
引导映像在运行时,可能在ROM/Flash中执行(例如ROM驻留型引导映像),也可能在RAM 中执行。
在系统中其对应的编译规则文件是rules.bsp。
BootRom类型分为三种:BootRom_res、BootRom_uncmp和BootRom。
第一种是一直运行在rom 中的映象,只把data段拷贝到ram 里面;第二种是非压缩方式的映象,data 段和text段都要拷贝到ram里面,并在ram里面运行;第三种是压缩方式的映象,生成的时候编译器会把除掉romlnit.s和bootInit.c之外的目标文件压缩并“汇编”成一个bootrom.Z.s,最后和romInit.o,bootInit.o,version.o进行链接,生成bootrom映像。
所以它也是要全部拷贝到ram 中,并必须要进行解压缩的工作。
而这些工作基本上都是在bootInit.c中进行的。
(2)VxWorks类型VxWorks类型映像是系统的主映像,也即是系统最终要运行的映像。
Vxworks操作系统下基本程序的编写和说明
-------
BJTU
第一章 多任务
多任务运行的实现实际上是靠CPU(中央处理单
元)在许多任务之间转换、调度。 CPU只有一个,轮番服务于一系列任务中的某一 个。 任务在自己的时间内运行,因时间片相当短,因 此,给用户的感觉,就好像任务是同时运行的一 样。 如果计算机拥有多个CPU,任务就能真正意义上 同时运行了。 多任务运行使CPU的利用率得到最大的发挥(流 水线),并使应用程序模块化。
轮转调度:优先级相同、处于就绪态的任务公平的分配CPU
时间片轮番调度法(不讲)
I. II.
当两个或两个以上任务有同样优先级,内核允 许一个任务运行事先确定的一段时间,叫做时 间额度(quantum),然后切换给另一个任务。 也叫做时间片调度。 内核在满足以下条件时,把CPU控制权交给 下一个任务就绪态的任务: 当前任务已无事可做 当前任务在时间片还没结束时已经完成了
不可重入型函数
int Temp; //全局变量 void swap(int *x, int *y) //形参,作用域为 此函数执行时 { Temp = *x; *x = *y; *y = Temp; }
非重入性(Reentrancy)
使Swap()函数具有可重入性
把Temp定义为局部变量(任务有自己的动态堆 栈,每个任务只是在自己的堆栈内进行操作。) 调用Swap()函数之前关中断,调用后再开中断 (牺牲了实时性): int locknumber = intLock( );//关中断 intUnlock ( locknumber ); //开中断 禁止任务抢占调度: taskLock(); //禁止抢占调度 taskUnlock(); //恢复抢占调度 用信号量禁止该函数在使用过程中被再次调用
vivado仿真设计流程
vivado仿真设计流程
原创 2016年08月17日15:47:59
•1301
•0
• 4
1. 建立工程
2. 添加源文件,运用verilog HDL描述电路
3. 综合,产生网表,直观的门级电路描述
4.仿真需要编写激励源一般模式:
添加一个.v文件,编写模式
module test_top;
/*输入定义为reg类型,因为要在inital块内初始化,输出定义为wire接到输出*/
reg in1 源文件的输入端;
wire out1源文件的输出端;
/* 调用top块,仿真*/
top(源文件名) uut(随意的名) (
.in (reg 后的命名),
.out(wire后的命名)
);
initial begin
in1 =1’b0;
#
50
in1 =1’b1;
#
50
in1 =1’b0;
$stop
end
endmodule
板级调试时,生成bit导入硬件时,
然后接着执行5
5. 添加约束条件,执行实现,然后图形界面更改引脚约束的默认设置,保存到约束文件。
创建仿真工程步骤
创建仿真工程步骤
创建仿真工程的步骤如下:
1. 确定模型和系统:确定要仿真的模型或系统,包括其结构、参数以及输入输出等。
2. 收集数据和获取参数:收集所需数据和参数,可以通过实验、文献或其他来源获取。
3. 建立数学模型:根据模型和系统的特点,选择合适的数学模型,进行建模。
4. 设定初始条件和边界条件:根据实际情况,设定仿真的初始条件和边界条件。
5. 确定仿真目标和评价指标:确定仿真的目标和评价指标,以便后续分析和评估仿真结果。
6. 编写仿真程序:根据所选的仿真软件,编写仿真程序。
可以使用MATLAB、Python等软件进行编程。
7. 运行仿真:运行仿真程序,根据设定的初始条件和边界条件进行仿真,生成仿真结果。
8. 数据分析和结果评估:对仿真结果进行数据分析和结果评估,根据评价指标来评估仿真的效果。
9. 优化调整:根据仿真结果和评估情况,对模型进行优化和调整,不断改进仿真效果。
10. 生成报告和展示结果:根据仿真结果和评估情况,生成相应的报告和图表,向相关人员展示仿真结果。
11. 验证和验证:使用其他手段或数据进行验证和验证,以检验仿真的准确性和可靠性。
12. 调整和改进:根据验证和验证的结果,调整和改进仿真模型和仿真程序,提高仿真的准确性和可靠性。
13. 文档归档和维护:对仿真工程进行文档归档和维护,方便后续的复盘和使用。
CTDB-MPC8379开发板 使用手册_vxWorks_
CTDB‐MPC8377E 开发板vxWorks 用户手册V1.22010‐06‐20目 录CTDB-MPC8377在vxWorks系统下的内存分配 (3)用vxWorks 6.6编译vxWorks bootrom.bin程序 (3)用uboot加载vxWorks bootrom.bin程序 (5)给CTDB-MPC8377加上ftp服务器端 (12)CTDB-MPC8377下多网口同时使用 (16)CTDB-MPC8377E开发板PCI (18)CTDB-MPC8377E开发板USB驱动测试 (24)使用WorkBench调试CTDB-MPC8379开发板 (29)CTDB-MPC8377E开发板常见问题FAQ (32)CTDB-MPC8377在vxWorks系统下的内存分配项目 地址 大小 IMMR 0xE000 0000 和cpu有关 NOR FLASH CS0 0xFC00 0000 8MB或32MB DDR2 SDRAM DDR CS0 0x0 512MBuboot 0xFC00 0000 ‐ 0xFC04 FFFFvxWroks bootload 0xFC10 0000‐0xFC17 FFFFvxWroks bootload 配置数据 0xFC26 0000vxWorksTFFS 0xFC40 0000‐0xFC7F FFFF 4MBuboot 0xFC00 0000 ‐ 0xFC04 FFFFUboot 配置数据Linux kernel 0xFC10 0000‐0xFC3F FFFF 3MBramdisk 0xFC40 0000 – 0xFCF7 FFFFlinuxLinux kernel dtb 0xFC7F 8000用vxWorks 6.6编译vxWorks bootrom.bin程序vxWorks 6.6的安装 见“vxWorks6.6 安装.avi”mpc837x bps的安装见“安装 mpc837x bsp.avi”BSP project建立和编译过程见 “mpc837x bsp 修改&编译.avi”vxWorks project的建立和编译过程见“建立和编译mpc837x vxWorks project.avi”视频文件播放问题,我是用vmWare录的AVI 文件,确实很多播放器无法播放,我计算机上装的 完美解码 播放器就无法播放,但用windows自带的mediaplayer可以播放播放vmware录制的avi格式视频的插件在没有安装vmware的机器上一般无法播放vmware虚拟机录制的视频,vmware官方提供了一个视频插件/software/wkst/VMware‐moviedecoder‐6.0.0‐45731.exe也可以下载附件里提取的安装包,windows32位64位通用首先安装mpc837xmds的bsp包,安装完后修改如下文件1、target\config\mds837x\Makefile# boot from U‐BootROM_TEXT_ADRS = fe100100 # ROM entry addressROM_SIZE = 00100000 # number of bytes of ROM spaceROM_WARM_ADRS = fe100108 # ROM warm entry addressROM_LINK_ADRS = fe100000改为# boot from U‐BootROM_TEXT_ADRS = fc100100 # ROM entry addressROM_SIZE = 00100000 # number of bytes of ROM spaceROM_WARM_ADRS = fc100108 # ROM warm entry addressROM_LINK_ADRS = fc1000002、target\config\mds837x\config.h把2处0xfe000000 改成0xfc0000001处//hq 0xFE260000->0xFC260000# define FLASH_ADRS 0xFC2600003、target\config\mds837x\hwconf.c把2个PHY的addr改成24/25//hq 2 ‐> 24{ "phyAddr", HCF_RES_INT, {(void *)24 }},//hq 3 ‐> 25{ "phyAddr", HCF_RES_INT, { (void *)25 }},注意:直接在BSP目录下 make vxWorks和建立vxWorks project编译来的vxWorks映像文件是不同的,一般来说BSP目录下编译出来的会少链接很多库,文件会小一些。
Vxworks虚拟机环境搭建
Vxworks虚拟机环境搭建一、tornado的安装大部分地方默认,部分要注意的地方如下:需要的安装包:[风河VxWorks].WINDRIVER.TORNADO.V2.2.FOR.PENTIUM.CD1.ISO[风河VxWorks].WINDRIVER.TORNADO.V2.2.FOR.PENTIUM.CD2.ISO 虚拟光驱工具:任意DTLite4356-0091.zip (必须通过虚拟光驱来安装)注册序列号:sn_all.txt 见第四条四、WINDRIVER.TORNADO.V2.2.FOR.PENTIUM软件大小:328M安装方法:1)首先安装虚拟光驱软件DAEMON3.22)分别MOUNT 文件夹CD1和CD2下后缀名为BIN的文件3)自动安装后,输入序列号如下:CD1: cAQ8i-qP2I&-g$vT6-3&gjw-bEk9gCD2: A7KbB-Rd37p-hNFBE-kzgaT-b9gpC4)拷贝CRACK目录下的license.dat 到c:\flexlm 目录,如果没有这个目录,自己建一个。
设置如下环境变量:LM_LICENSE_FILE = c:\flexlm\license.dat按装完tornado后,首先要解压vxworks_end.exe文件三次出现target文件夹,将target\h\drv\end\ln97xEnd.h和target\src\drv\end\ln97xEnd.c、Makefile 覆盖对应的问件。
不要全部覆盖。
(其他的config\pc486.972、man文件夹都不要,太旧了。
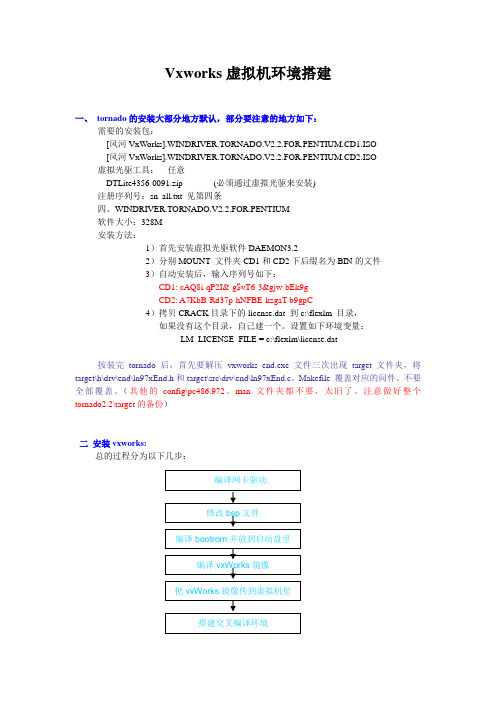
注意做好整个tornado2.2\target的备份)二安装vxworks:总的过程分为以下几步:1、编译网卡驱动单击windows系统的开始菜单,在“运行”里输入“cmd”打开控制台程序。
进入:D:\tornado2.2\host\x86-win32\bin\运行:torVars.bat;进入:cd D:\tornado2.2\target\src\drv\end目录运行:make CPU=PENTIUM tool=gnu ln97xend.o (这一步会出现重复提示,不要管它,它自己会结束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MPC8377硬件环境下vxworks仿真的建立过程
2012-8-7
U-BOOT常用命令:
重启:reset
查看环境变量:printenv
修改环境变量:例如修改PC机IP,setenv serverip “……”
保存环境变量:saveenv
下载bootrom:run laodvx
如果需要用到其他命令,在命令行输入“?”查看。
1.首先,需要在FLASH中烧写好U-BOOT,把串口和网线连接好(如果多串口和网口的话,请检查并接在正确的位置),打开串口调试工具并设置在数据读取状态,然后上电,在倒计时读秒完成前在命令输入行输入任何信息进入U-BOOT层。
命令行
U-BOOT读秒区
2.在命令行输入printenv命令会显示U-BOOT的信息,如果ip不是我们想要的,可以通过setenv serverip “……”来修改,如下图中就把ip从192.168.1.24
改为192.168.1.43,修改完成后需要saveenv,然后reset,整个修改完成。
Printenv命令后的ip信息
Setenv serverip ”192.168.1.43”
后的结果
3.下载bootrom。
先找到vxworks编译好的bootrom.bin文件,例如:本PC 上的路径C:\WindRiver-GPPVE-3.6-PPC-Eval\vxworks-6.6\target\config\mds837x,如下图。
需要的bootrom文件
把bootrom复制到tftp软件所在的位置,如下图。
放置好的bootrom文件
然后启动tftp软件,并在命令行输入:run loadvx,成功后如下图,至此bootrom 下载完毕。
下载成功后tftp显示信息
4.Vxworks下载。
首先启动Vxworks6.6自带的ftp server,并配置好登陆用户和密码以及相关设置,主要有两部分设置,如下图。
用户配置界面
Logging设置界面
vxworks读秒完成前,在命令行输入任意信息,进入vxworks boot,输入“P”,显示vxworks相关信息,输入“@”,通过网络加载vxworks映像文件,输入“?”,可以显示所有的命令,如下图。
注意:PC机和开发板的IP配置必须在一个网段,否则无法完成加载,上图中的IP就不在一个网段,可以config.h中进行修改,修改完成并编译,然后重复上述的过程即可。
修改成功后的结果如下图。
IP配置
Vxworks boot 读秒区
Vxworks相关信息
修改后的IP
加载成功后,串口调试显示结果和ftp显示结果如下。
加载成功后的显示信息
程序运算结果
ftp server显示信息
Vxworks中添加调试程序的位置在usrappinit.c和usrrtpappinit.c,如下。
usrappinit.c的位置
自己添加的程序
通过cmd.exe输入命令查看的结果如下图。
5.硬件仿真环境的建立。
首先要新建一个连接,点击WorkBench 左下角窗口的define a connection to remote system 按扭,就会出现配置界面,如下图。
需要点击的按扭
填写正确的IP
选择正确的地址
目标文件
其他默认即可,点finish 就可以了。
连接目标板,右键新建的连接,点弹出的菜单中的Connect ‘vxWorks6x_ 192.168.1.2’就可以了。
连接成功后,可以看到如下的信息,如Kernel Tasks 的信息如下。