浅谈工业机器人的运动停止
第9章 机器人停止机制
一、停止机制
机器人系统可以配备各种各样的安全保护装置,例如安全门互 锁开关、安全光幕和安全垫等。最常用的门互锁开关,打开此装置 可以暂停机器人。
机器人控制柜有4个独立的安全保护机制,分别为: 常规模式安全保护停止(GS)
自动模式安全保护停止(AS)
上级安全保护停止(SS)
紧急停止(ES)
一、停止机制
2、自动模式安全保护停止AS(AUTO STOP适用于自动模式)
1.控制原理:当5-6和11-12号针脚短接片 断开后,机器人进入常规停止状态(暂 停),1-2针脚的NC触点断开。 2.连接说明: 1)将X5端子第5,11号脚短接片剪掉。 2)AS1和AS2分别单独接入NC无源触点。 3)如果要输入一般停止信号必须同时使 用AS1和AS2.
一、停止机制
4、紧急停止ES(Emer Stop适用于所有模式)
1.控制原理:当3-4号针脚短接片断开 后,机器人进入 紧急停止,1-2针脚 的NC触点断开。 2.连接说明: 1)将X1和X2端子第3脚短接片剪掉。 2)ES1和ES2分别单独接入NC无源触点。 3)如果要输入紧急停止信号必须同时 使用ES1和ES2。
如果机器人被堵在障碍物之间,在障碍物容易移动的情况下, 可直接移开周围的障碍物,再手动操纵机器人运动至安全位置
二、急停恢复方法
如果周围障碍物不易移动,也很难直接手动操纵机器人到 达安全位置,那么可以选择按松开抱闸按钮,手动操纵机器人 运动到安全位置。
操作方法:一人先托住机器人(如图所示)
二、急停恢复方法
一、停止机制
3、上级安全保护停止SS(Superior Stop适用于所有模式)
1.控制原理:当1-2和4-5号针脚短接 片断开后,机器人进入上级停止状态。 2.连接说明: 1)将X6端子第1,4号脚短接片剪掉。 2)SS1和SS2分别单独接入NC无源触点。 3)如果要输入一般停止信号必须同时 使用SS1和SS2.
浅谈工业机器人台车硬限位受力分析
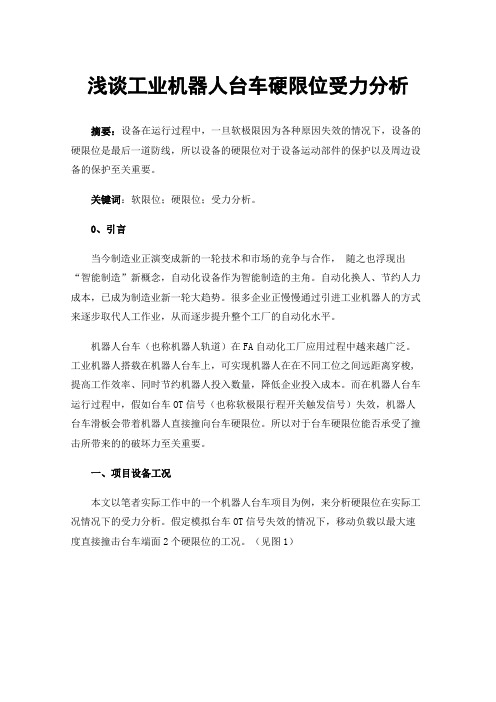
浅谈工业机器人台车硬限位受力分析摘要:设备在运行过程中,一旦软极限因为各种原因失效的情况下,设备的硬限位是最后一道防线,所以设备的硬限位对于设备运动部件的保护以及周边设备的保护至关重要。
关键词:软限位;硬限位;受力分析。
0、引言当今制造业正演变成新的一轮技术和市场的竞争与合作,随之也浮现出“智能制造”新概念,自动化设备作为智能制造的主角。
自动化换人、节约人力成本,已成为制造业新一轮大趋势。
很多企业正慢慢通过引进工业机器人的方式来逐步取代人工作业,从而逐步提升整个工厂的自动化水平。
机器人台车(也称机器人轨道)在FA自动化工厂应用过程中越来越广泛。
工业机器人搭载在机器人台车上,可实现机器人在在不同工位之间远距离穿梭,提高工作效率、同时节约机器人投入数量,降低企业投入成本。
而在机器人台车运行过程中,假如台车OT信号(也称软极限行程开关触发信号)失效,机器人台车滑板会带着机器人直接撞向台车硬限位。
所以对于台车硬限位能否承受了撞击所带来的的破坏力至关重要。
一、项目设备工况本文以笔者实际工作中的一个机器人台车项目为例,来分析硬限位在实际工况情况下的受力分析。
假定模拟台车OT信号失效的情况下,移动负载以最大速度直接撞击台车端面2个硬限位的工况。
(见图1)图11.1项目概况本项目为洁净室机器人行走台车,应用于液晶面板在各个工序之间的流转搬运作业。
设备要求机器人最大行走速度2m/s,并且24小时不间断作业,项目设备质保2年。
笔者在该项目中担任项目负责人职位,负责前期方案设计和洽谈以及项目实施中的承担机械设计任务等。
该项目从方案洽谈到设备交付耗时5个月。
1.2硬限位构造硬限位构造(见图2):缓冲块:聚氨酯材质(1件)限位块:Q235材质(1件)M14螺丝:12.9级发黑高强度螺丝(6颗)图21.3移动负载移动负载=2560kg (Robot本体重量+Robot末端负载)=760kg (台车滑板重量) =1.3 (工况系数)即:移动负载=(2560+760)*1.3kg=4316kg1.4移动负载运动参数最大速度V=2m/s撞击后停止预设时间t=0.1s,撞击加速度20。
工业机器人的运动规划与控制
工业机器人的运动规划与控制工业机器人是一种重要的现代制造设备,可用于各种生产流程,使生产效率和质量得到提高。
它们的核心是运动规划和控制系统。
本文将介绍工业机器人的运动规划和控制原理。
一、运动规划首先,运动规划是工业机器人控制的核心,主要目的是掌控机器人执行特定任务所需的位置和运动。
工业机器人通常采用9个自由度或自由度较低的机械结构,在3D空间中运动,并执行特定的任务。
在运动规划过程中,机器人必须考虑运动约束,例如工件和工具的几何形状和工作区域,以及传感器反馈和运动不确定性等因素。
因此,运动规划可以分为点到点规划和连续规划两种。
点到点运动规划是指机器人从一个位置移动到另一个位置,以执行一个特定的任务。
这个过程通常分为三个步骤:位置解算、路径规划和检测。
位置解算确定了机器人的开始和结束位置。
路径规划指的是机器人运动的路径,它通常通过三维空间模型和机器人运动学解算来实现。
最后,检测过程会检查路径中是否有任何障碍物(如其他机器人)或运动线路的冲突,并对机器人进行调整以避免潜在的碰撞。
连续运动规划是一种更复杂的机器人运动控制方式,它允许机器人按一定的运动规律运动,以控制机器人工具在时间范围内的位置和姿态。
这种运动规划需要考虑因素更多,包括力和动力学方程、摩擦力、负载和环境不确定性等,因此也更加复杂。
二、控制原理运动控制是工业机器人控制的第二个核心部分。
在运动控制中,机器人必须通过传感器的反馈来计算其位置、速度和加速度等物理参数。
这个过程通过使用定位系统(如编码器)和传感器技术如视觉技术、激光点云技术等来实现。
根据控制系统的类型和应用程序,工业机器人的控制系统通常可以分为开闭环两种。
在开环控制中,机器人按照预定义的路径或规则运动,不考虑传感器反馈信息。
这种控制适用于已经确定好的任务,例如重复的体力劳动和简单的装配操作。
相反,在闭环控制中,机器人会实时监测和调整它的姿态和位置,以保持其所需的状态。
这种控制技术可以更好地适应机器人的不确定性和变化的工作环境。
工业机器人操作与编程机器人的停止机制

1. 机器人的停止机制
2. 1.1 停止机制 1.2 急停恢复方法
1/8
主要内容
• 了解机器人的停止机制。
2/8
1.1
停止机制
机器人系统可以配备各种各样的安全保护装置,例如安全门互锁开 关、安全光幕和安全垫等。最常用的门互锁开关,打开此装置可以暂停机器 人。
机器人控制柜偶4个独立的安全保护机制,分别为: 常规模式安全保护停止(GS) 自动模式安全保护停止(AS) 上级安全保护停止(SS) 紧急停止(ES)
5/8
1.2
急停恢复方法
另一人按下控制柜上的“松开抱闸按钮”(如图所示),电机抱 死状态解除后,托住机器人移动到安全位置后松开“松开抱闸按钮”。然后 松开急停按钮,按下上电按钮,机器人系统恢复到正常工作状态。
6/8
总结• Biblioteka 过学习机器人的停止机制 ,掌握急停恢复方法。
7/8
THANKS!
如果机器人被堵在障碍物之间,在障碍物容易移动的情况 下,可以直接移开周围的障碍物,再手动操纵机器人运动至安全位置。
4/8
1.2 急停恢复方法
如果周围障碍物不易移动,也很难通直接过手动操纵机器人到达 安全位置,那么可以选择按松开抱闸按钮,手动操纵机器人运动到安全位置。
操作方法:一人先托住机器人(如图所示)。
3/8
1.2 急停恢复方法
在机器人的手动操作过程中,由于操作者不熟练引起的碰撞 或者其他突发状况的发生,会导致机器人安全保护机制启动工作,机 器人紧急停止。
机器人紧急停止后,需要进行一些恢复操作,才能使机器 人恢复到正常工作状态。
在紧急停止机器人后,机器人停止的位置可能会处于空旷 区域,也有可能被堵在障碍物之间。如果机器人处于空旷区域,可以 选择手动操纵机器人运动到安全位置。
工业机器人运动轨迹

基于几何学的方法主要关注机器人末端执行器的位置和姿态,通过几何 计算来求解运动轨迹。这种方法简单直观,但在处理复杂约束和动态环 境时存在局限性。
03
综合来看,工业机器人运动轨迹规划 是一个多学科交叉的领域,需要综合 考虑几何学、动力学、人工智能等多 个方面的因素。未来的研究可以从以 下几个方面展开:提高规划算法的实 时性和鲁棒性、研究复杂约束下的运 动轨迹规划方法、探索多机器人协同 运动轨迹规划技术等。
研究展望
• 随着技术的不断发展,工业机器人将在更多领域得到应用,如医疗、航空、深 海等领域。这些领域具有特殊的约束和环境条件,需要针对具体情况研究相应 的运动轨迹规划方法。
运动轨迹规划方法
要点一
总结词
运动轨迹规划方法可以分为基于规则的方法、基于搜索的 方法、基于优化方法等。
要点二
详细描述
基于规则的方法是根据经验或规则来规划机器人的运动轨 迹,这种方法简单易行,但缺乏灵活性。基于搜索的方法 是通过搜索空间来寻找最优的运动轨迹,这种方法能够找 到最优解,但计算量大,时间长。基于优化方法是通过数 学模型和优化算法来规划机器人的运动轨迹,这种方法能 够找到最优解,且计算量相对较小。
案例一:汽车制造行业中的应用
总结词
高效、精确、可重复
详细描述
在汽车制造过程中,工业机器人被广泛应用于焊接、涂装、装配等环节。通过 精确的运动轨迹规划,机器人能够高效地完成复杂的工作流程,提高生产效率, 减少人工干预,确保产品质量。
案例二:电子制造行业中的应用
详解库卡机器人的几种停止连续运行指令

详解库卡机器人的几种停止连续运行指令详解库卡机器人的几种停止连续运行指令1. 库卡机器人简介库卡机器人是一种广泛应用于工业生产领域的自动化设备,它能够执行各种任务,包括重复性操作、物料搬运、装配等。
库卡机器人不仅可以提高生产效率,还能减少人力成本和人为误差,因此受到了广泛的关注和应用。
2. 停止连续运行指令的重要性在实际的生产场景中,库卡机器人可能需要频繁地进行运行和停止操作,而停止操作的正确执行对于生产效率和安全性至关重要。
库卡机器人的几种停止连续运行指令成为了保障生产顺利进行的重要因素。
3. 停止连续运行指令的分类库卡机器人的停止连续运行指令可以分为紧急停止、紧急停止复位、暂停和停止等几种类型。
3.1 紧急停止紧急停止指令是在出现紧急情况时立即停止机器人运行的指令,例如在发现机器人出现故障或不安全的情况下。
紧急停止的执行立即中断了机器人的运行,并保护了运行时的安全。
3.1.1 紧急停止的执行方法紧急停止可以通过按下紧急停止按钮来执行,或者通过远程方式发送紧急停止指令来实现。
这种操作保证了在不同情况下都可以及时停止机器人的运行,有效避免了潜在的安全隐患。
3.2 紧急停止复位紧急停止复位是指在紧急停止状态下,重新启动机器人的运行,并确保机器人在此期间没有继续进行操作。
紧急停止复位的执行可以通过按下紧急停止按钮后再进行复位操作来实现。
3.3 暂停暂停指令是指在机器人当前任务执行到一定程度时,需要暂停机器人的运行,并在暂停期间保持机器人的当前状态。
暂停指令的执行可以让操作人员进行必要的调整和处理后再继续机器人的运行。
3.4 停止停止指令是指在机器人完成当前任务后,需要停止机器人的运行,并将机器人置于空闲状态,以便后续的操作和任务安排。
停止指令的执行可以保证机器人在不需要运行的情况下安全停止。
4. 个人观点和理解在使用库卡机器人时,正确使用几种停止连续运行指令对于生产安全和效率至关重要。
紧急停止、紧急停止复位、暂停和停止等几种指令可以根据实际情况进行灵活应用,以保证机器人运行的安全和顺利。
详解库卡机器人的几种停止连续运行指令

标题:深度了解库卡机器人的几种停止连续运行指令一、引言在工业自动化领域,库卡机器人作为一种先进的自动化设备,已经被广泛应用于各种生产线上。
然而,在实际操作中,如何有效地停止库卡机器人的连续运行,成为了工程师们关注的一个重要问题。
本文将深入探讨库卡机器人的几种停止连续运行指令,帮助读者全面理解库卡机器人的操作原理和方法。
二、基本概念我们需要了解库卡机器人的基本概念。
库卡机器人是一种灵活的工业机器人,可以实现各种自动化操作,如搬运、装配、焊接等。
在进行连续运行时,为了安全和控制的需要,我们需要对机器人进行停止操作。
库卡机器人的几种停止连续运行指令,是在不同情况下对机器人进行停止操作的方法。
三、紧急停止紧急停止是指在出现紧急情况下,需要立即停止机器人运行的操作。
在库卡机器人中,通常采用的紧急停止指令是“停止”指令。
当操作人员发现机器人出现异常情况或者发生安全隐患时,可以通过按下紧急停止按钮或者发送紧急停止指令,立即停止机器人的运行,确保人员和设备的安全。
四、程序停止除了紧急停止外,库卡机器人还支持程序停止指令。
在实际生产操作中,有时候需要对机器人进行临时性的停止,但又不属于紧急情况。
这时,可以通过发送程序停止指令来实现。
程序停止指令通常是在机器人当前任务执行完毕后停止,或者在特定条件下暂停机器人的运行。
五、安全停止除了紧急停止和程序停止外,库卡机器人还支持安全停止指令。
安全停止是指在正常工作条件下,需要停止机器人运行以进行维护或者其他操作。
库卡机器人提供了丰富的安全停止功能,可以根据实际需要对机器人进行安全停止操作,保障生产和设备的安全。
六、总结和回顾通过对库卡机器人的几种停止连续运行指令的深入了解,我们不仅可以更好地掌握机器人的操作方法,还可以在实际生产中更灵活地应对不同情况。
紧急停止、程序停止和安全停止是库卡机器人停止连续运行的重要方法,分别适用于不同的工作场景。
在实际操作中,我们需要根据实际情况合理选择停止指令,确保机器人运行的安全和高效。
机器人技术中的运动控制
机器人技术中的运动控制近年来,随着科技的不断进步,机器人技术越来越成熟。
机器人的应用范围也越来越广泛,从汽车工厂到食品加工厂、医疗机构、甚至是家用服务机器人等。
在机器人的运动控制技术中,机器人的运动控制是不可或缺的一环。
机器人的运动控制指的是对机器人完成各种动作的速度、位置和方向等参数进行精确控制的技术。
它是机器人系统的核心,直接影响到机器人的精度、效率、安全等方面。
机器人运动的轨迹和控制方式不同,机器人的运动控制技术也会有所不同。
目前,主要的机器人运动控制技术有以下几种:1.伺服控制技术伺服控制技术是机器人运动控制中最为常用的一种方式。
伺服控制技术是利用电机的位置信号与电机转子之间的差距来进行控制,以此来实现精准的位置控制和速度控制。
伺服控制技术可以用于机器人的关节控制、操作控制和位置控制等方面。
2.步进电机控制技术步进电机控制技术适用于需要小的、精确的调整的控制任务。
它是一种开环控制技术,与伺服控制技术相比,精度略低,但成本低廉。
通常,步进电机控制技术会应用于精度要求不高的位置控制等任务。
3.直流电机控制技术直流电机控制技术是一种开环控制技术,其速度可以通过改变电压大小、电流方向和电极数目来进行调节。
直流电机控制技术应用较广,其成本较低,控制效果便于实现。
4.气动控制技术气动控制技术适用于需要大量、长时间的执行任务。
它是通过调节压缩空气的供给、动力和管道方程来实现控制任务。
气动控制技术可以应用于机器人的抓取与夹持、振动器和推杆等部位的动作控制等。
除了以上几种运动控制技术之外,由于机器人技术的不断发展和进步,各种新型的机器人运动控制技术也不断涌现。
例如控制器间的数据通信、对机器人动作进行多项数学算法等。
这些新型技术的应用,将为机器人运动控制技术的发展提供新的思路和方向。
不断深化机器人运动控制技术,将带来新的机器人应用领域,为未来的科技发展注入新的活力。
总的来说,机器人技术的发展已经为人们带来了许多便利。
浅谈工业机器人启停控制方法

10.16638/ki.1671-7988.2020.16.075浅谈工业机器人启停控制方法吴金旭,张亚军,师彦超,陈争光,毕平安(奇瑞商用车(安徽)有限公司河南分公司,河南开封475000)摘要:随着工业4.0技术革新的到来,工业机器人在制造行业的应用得到广泛普及,汽车行业尤为明显。
目前国内外的机器人品类繁多,而且针对不同用途(焊接、搬运、喷涂)采用不同品类、特性的机器人,一个主机厂可能拥有3类以上品牌、型号的机器人。
因此需要设备人员掌握相应技术特性。
文章着手对机器人启停控制系统的梳理,归纳总结出不同类别机器人的通用技术特点,搭建底层控制逻辑,为设备工程人员开展现场安装调试、预防维保提供参考。
关键词:启动;停止;再启动中图分类号:U462 文献标识码:A 文章编号:1671-7988(2020)16-228-04A Brief Discussion on the Start-stop Control Method of Industrial RobotsWu Jinxu, Zhang Yajun, Shi Yanchao, Chen Zhengguang, Bi Pingan(Chery Commercial Vehicle (Anhui) Co., Ltd. Henan Branch, Henan Kaifeng 475000 )Abstract: With the advent of industry 4.0 technology innovation, industrial robots have been widely used in the manufactur -ing industry, especially in the automobile industry. At present, there are various kinds of robots at home and abroad, and robots of different categories and characteristics are used for different purposes (welding, handling and spraying). A main engine factory may have more than three types of robots of different brands and models. Therefore, equipment personnel need to master the corresponding technical characteristics. This paper starts to sort out the robots start-stop control system, summarizes the general technical characteristics of different types of robots, builds the underlying control logic, and provides references for equipment engineers to carry out on-site installation, debugging, prevention and maintenance. Keywords: Robot start; Robot stop; Robot restartCLC NO.: U462 Document Code: A Article ID: 1671-7988(2020)16-228-041 机器人启动控制机器人的伺服上电主要为手/自动两种模式,手动模式下,安全回路正常时(因为要手动示教,安全门在此模式下可以不启用)按下机器人的伺服准备按钮,机器人处于待机状态,按下示教启动开关,伺服使能开始示教。
详解库卡机器人的几种停止连续运行指令

详解库卡机器人的几种停止连续运行指令
库卡机器人是一种工业机器人,可以执行各种任务。
在操作库卡机器人时,停止连续运行是一个重要的指令,可以确保机器人在特定的条件下停止工作或转到其他任务。
以下是几种常见的停止连续运行指令及其相关参考内容:
1. STOP:该指令用于停止机器人当前的运行任务。
使用该指令后,机器人将停止运动并保持静止状态。
此指令可以在程序中的任何位置使用,以防止机器人在执行程序时出现问题。
例如:
STOP ;
运行条件:
无
2. HALT:该指令用于暂停机器人的连续运行。
与STOP指令不同,HALT指令允许机器人在运动过程中保持当前位置,直到收到恢复指令。
例如:
HALT ;
运行条件:
无
3. ABORT:该指令用于立即终止机器人的运行。
与STOP和HALT指令不同,ABORT指令会立即停止机器人的所有运动和程序执行,并进行相应的紧急停止程序。
例如:
ABORT ;
运行条件:
无
4. PAUSE:该指令用于暂停机器人的运行。
与HALT指令不同,PAUSE指令会使机器人暂时停止运动,但保持与外部设
备的通信。
例如:
PAUSE ;
运行条件:
无
这些是库卡机器人的几种停止连续运行指令及其相关参考内容。
使用这些指令,可以根据实际需求控制机器人的运行和停止,确保机器人工作的安全和可靠性。
在实际应用中,还可以进一步结合其他指令和条件,制定更复杂的机器人控制策略,以满足特定的任务要求。
工业机器人操作注意事项
工业机器人操作注意事项
工业机器人进行作业时,操作人员应该注意的以下要点:
1、必须检查机器人在不在原点位置,严禁不在原点位置启动机器人。
2、机器人示教与运行过程中,请确认机器人动作范围内没有闲杂人员。
3、机器人运行中,需停下来时,可按外部急停按钮、暂停按钮、示教盒上的急停按钮,如需继续工作,可按复位按钮让机器人继续工作。
4、关闭机器人电源前,不用按外部急停按钮,可以直接关闭机器人电源。
5、当发生故障或报警时,请把报警代码和内容记录下,以便技术人员解决问题。
6、作业结束,必须关电源、关气阀、清理设备、整理现场。
工业机器人的运动规划与控制技术

工业机器人的运动规划与控制技术工业机器人近年来的广泛应用,已经成为了现代制造行业中不可或缺的组成部分。
工业机器人的广泛应用主要源于其能够替代人力完成重复性、繁琐的劳动。
而机器人制造技术的最大突破之一,就是机器人的运动规划与控制技术。
本文将着重阐述工业机器人的运动规划与控制技术,并探讨其在现代制造业中的应用。
一、运动规划工业机器人的运动规划是一个非常关键的环节。
在机器人执行任务之前,需要确定每一步的运动轨迹和姿态,这就是运动规划。
运动规划的主要目的就是使机器人能够执行复杂的动作,例如抓取、搬运、加工、焊接等。
传统的运动规划方式是基于手工编写操作规程,这种方式存在许多弊端。
首先,手工编写规程需要经验丰富的专家参与,这会增加成本和时间。
其次,手工编写的规程可能存在错误,这会导致机器人在执行任务时出现问题。
为了解决以上问题,学者们提出了基于优化算法的运动规划方式。
基于优化算法的运动规划方式主要有两种:基于规划空间搜索的方法和基于最优化算法的方法。
基于规划空间搜索的方法是通过预处理的空间对机器人的每一步运动规划进行搜索。
在此过程中,机器人的环境模型被构建,通过对空间进行搜索,找寻最佳路径。
这种方法可以得到很好的结果,但是它需要大量的计算能力和长时间的运算。
此外,由于规划空间往往非常巨大,所以很难处理非线性、高维、复杂的运动规划问题。
基于最优化算法的方法采用数学模型化的思路,通过最小化预设的代价函数来获得最佳路径。
此方法不需要搜索预处理的空间,只需要对机器人的环境模型进行基本的描述。
然而,由于许多任务的代价函数都是非线性的,因此需要求解数学最优解。
数学问题的求解在运算时间上加速,但这也存在局限性。
此外,许多代价函数的求导也非常困难。
二、控制技术工业机器人的控制技术是指如何使机器人能够按照预定的轨迹精细地运动。
工业机器人的控制技术大致分为两个阶段,即插补控制和运动控制。
插补控制是指在机器人轨迹规划后,对轨迹进行插值平滑,从而获得连续的平滑速度轨迹。
浅谈工业机器人的运动停止
工业机器人的规范操作–现场操作员的素养Posted on 2009/05/22 by LTReply麻烦是这样来的,当某日机器人宕机,比如电缆故障、系统崩溃等,机器人的resolver counter丢失同步,此时要重新update,当你辛苦做完后,试车机器人轨迹点位,却头大了,点位有偏差!而且不是一个两个点位,且这些点位也不是有规律分布。
你所能做的就是只好耐着性子,逐个把点位调整好,整套做下来你会发现宝贵的几小时时间也不在,调点也搞得精疲力竭。
问题是怎样产生的呢?原因就是上一次为此机器人做resolver counter update的操作者并没在机器人的姿态位于正确位置时,进行了更新counter的操作,然后在此错误的前提下又进行了调点的操作。
然后下一位操作者又重新做了正确的counter update,于是就面临着点位又一次的调整。
要解决这个问题,可以从两方面着手:一是从机器人本身的设计来说,二是从规范机器人操作员本身的素养来说。
一机器人本身来说1、备份电池功能失效。
counter信息需要由电池电力来保存,一旦电池不足维持记忆,而控制柜又意外断电,那么丢失counter就在所难免。
所以维护方面要做好备份电池的及时更换。
2、电缆失效。
工作现场的环境恶劣可能会造成电缆的短路、短路,一旦发生,机器人轻则counter丢失、系统损坏,重则损坏硬件。
这种失效只能一方面希望生产厂家能采用更高质量的电缆以及更合理的走线方式,另一方面使用厂家也应做好生产环境的妥善管理。
3、机器人的设计。
生产厂家可以考虑有更方便的集成调零程序和设备,以便发生丢失counter时,能有操作的一致性。
二从规范机器人操作员素养来说1、一定要强化做counter update时,机器人各关节一定要位于正确位置的必要性。
目前来说工厂大,机器人分布广,操作人员不统一,也是此问题的最大头疼点。
2、培训操作员的理论知识,比如为什么要做counter,以及该在怎样的情况下来做。
工业机器人课件-程序文件的暂停
1、通过控制器面板的Stop按钮输入 2、通过外部Stop专用信号输入
程序文件的暂停
二、暂停信号的输入方式
1、通过控制器面板的Stop按钮输入 2、通过外部Stop专用信号输入 3、通过程序的XStp指令语句
程序文件的暂停
三、暂停的确认
1、通过插槽状态监视窗口查看
程序文件的暂停
三、暂停的确认
2、通过特殊状态变量M_Wai查看
程序文件的暂停
程序文件的暂停
一、暂停的基本概念
暂停插槽,中止执行所加载的程序文件,叫做暂停。 只有当插槽处于运行中状态时才能暂停插槽,中止执行 程序文件; 任何情况下,暂停插槽不会发生报警。
程序文件的暂停
二、暂停信号的输入方式
1、通过控制器面板或示教器面 板上的Stop按钮输入
程序文件的暂停
二、暂停信号的输入方式
浅谈在教学中如何使用ABB机器人中断指令

浅谈在教学中如何使用ABB机器人中断指令摘要:随着德国的工业4.0,中国制造2025口号的出现,标志着世界正在进行一场重要的工业革命。
而这一次革命的主角是工业机器人,机器人技术应用在世界上的规模出现了前所未有的发展和壮大,各工业大国都非常重视机器人的发展,工业机器人自动化生产线成套设备已成为自动化装备的主流及未来的发展方向。
在众多机器人品牌中,世界四大工业机器人品牌之一的ABB机器人因为其开放性比较强,得到了广范的应用,全球领先。
许多企业和学校都使用了ABB机器人。
在机器人行业中,中断指令又是非常重要的内容,所以本文主要是讲述ABB机器人在教学中的中断指令学习。
关键词:机器人;指令;中断1、概述(1)什么是中断?ABB机器人的RAPID程序的执行过程中,如果发生需要紧急处理的情况,这就要机器人中断当前的执行,程序指针PP马上跳转到专门的程序中对紧急的情况进行相应的处理,结束了以后程序指针PP返回到原来被中断的地方,继续往下执行程序。
那么,专门用来处理紧急情况的专门程序,我们就叫做中断程序(TRAP)。
中断程序经常会用于出错处理,外部信号的响应这种实时响应要求高的场合。
(2)中断程序中用到的相关指令介绍。
Idelete:取消中断IsignalDI:使用一个数字输入信号触发中断IsignalDO: 使用一个数字输出信号触发中断IsignalAI:使用一个模拟输入信号触发中断IsignalAO: 使用一个模拟输出信号触发中断Ierror:当一个错误发生时触发中断CONNECT:连接一个中断符号到中断指令Crobt:读取工业机器的当前的robtarget(目标点)Procall:调用子程序指令2、任务布置。
如图示:中断指令出现前,机器人绕着桌子上面的四边形(四个角)运动;当中断触发信号DI置1后,也即是中断触发信号发出后,机器人停止当前运动,然后绕着桌子里面的黄绿色曲线的边缘运动。
3、程序框架如下4、相关指令的位置5、程序编写步骤如下:(1)单击左上角主菜单按钮(2)选择“程序编辑器”(3)单击“例行程序”(4)点击左下角文件菜单里的“新建例行程序”。
工业机器人的运动规划与控制

工业机器人的运动规划与控制第一章:引言工业机器人近年来被广泛应用于制造业领域。
工业机器人的准确控制和高效生产已经成为现代制造业的标志性特征。
其中,机器人的运动规划和控制是实现高效生产的关键。
本文将介绍现代工业机器人的运动规划和控制方案,包括各种运动方案、控制方法和传感技术。
第二章:机器人运动机器人可以实现多种运动模式,例如点到点运动、直线运动、圆弧运动和连续轨迹运动。
在实际应用中,机器人通常需要完成各种复杂的运动任务,因此需要设定相应的运动轨迹。
运动轨迹是指机器人在空间中运动的路径和速度。
为了实现高精度运动跟踪,现代工业机器人通常采用开环或闭环控制策略。
第三章:运动规划运动规划是机器人控制的第一步。
它可以将任务要求转化为实际的运动轨迹。
常用的运动规划方法有:直线规划、圆弧规划和样条规划。
直线规划:也称为点到点规划,是一种简单的运动规划方法。
它将机器人从起点移动到终点,过程中没有任何中间点。
该方法适用于简单的应用场景,但难以应对复杂的运动任务。
圆弧规划:通过定义圆弧的半径和中心来实现运动规划。
该方法对于需要围绕一个中心点旋转的任务非常有效。
样条规划:这是一种基于多项式函数的运动规划方法。
机器人可以基于目标轨迹匀速调整速度,以适应不同的运动任务。
第四章:运动控制机器人的运动控制是指通过控制机器人系统的各种元件来实现机器人的精确运动。
在现代工业机器人中,运动控制算法在保持精度的同时尽可能减少了系统响应时间。
常用的运动控制方法有:位置控制、速度控制和力控制。
位置控制:这种控制方法通常在精确轨迹跟踪和点到点运动中使用。
该方法利用反馈控制机制,将机器人定位到指定位置。
速度控制:这种控制方法通过控制机器人的速度来辅助反馈控制。
它通常用于机器人需要平滑移动的应用场景中。
力控制:通过控制机器人的力矩来实现以控制力反馈为基础的控制策略。
这种方法可以改善机器人在高压机械焊接或制动场景中的性能。
第五章:传感技术传感技术在机器人控制和运动规划中非常重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人的规范操作–现场操作员的素养Posted on 2009/05/22 by LTReply麻烦是这样来的,当某日机器人宕机,比如电缆故障、系统崩溃等,机器人的resolver counter丢失同步,此时要重新update,当你辛苦做完后,试车机器人轨迹点位,却头大了,点位有偏差!而且不是一个两个点位,且这些点位也不是有规律分布。
你所能做的就是只好耐着性子,逐个把点位调整好,整套做下来你会发现宝贵的几小时时间也不在,调点也搞得精疲力竭。
问题是怎样产生的呢?原因就是上一次为此机器人做resolver counter update的操作者并没在机器人的姿态位于正确位置时,进行了更新counter的操作,然后在此错误的前提下又进行了调点的操作。
然后下一位操作者又重新做了正确的counter update,于是就面临着点位又一次的调整。
要解决这个问题,可以从两方面着手:一是从机器人本身的设计来说,二是从规范机器人操作员本身的素养来说。
一机器人本身来说1、备份电池功能失效。
counter信息需要由电池电力来保存,一旦电池不足维持记忆,而控制柜又意外断电,那么丢失counter就在所难免。
所以维护方面要做好备份电池的及时更换。
2、电缆失效。
工作现场的环境恶劣可能会造成电缆的短路、短路,一旦发生,机器人轻则counter丢失、系统损坏,重则损坏硬件。
这种失效只能一方面希望生产厂家能采用更高质量的电缆以及更合理的走线方式,另一方面使用厂家也应做好生产环境的妥善管理。
3、机器人的设计。
生产厂家可以考虑有更方便的集成调零程序和设备,以便发生丢失counter时,能有操作的一致性。
二从规范机器人操作员素养来说1、一定要强化做counter update时,机器人各关节一定要位于正确位置的必要性。
目前来说工厂大,机器人分布广,操作人员不统一,也是此问题的最大头疼点。
2、培训操作员的理论知识,比如为什么要做counter,以及该在怎样的情况下来做。
熟悉机器人结构理论,才会有正确的操作,比如常见的有四连杆机构的IRB2400的2轴和3轴就应该让操作员理解这两轴是有关联的,只有将2轴位于正确的位置,才有可能操作3轴。
工具并不是完美的,这就需要有一套科学的管理流程来最大化降低工具的弱点。
写到最后,在别处看到一句话我想很适合做结尾:归零,是否就能回到原点?ABB Robot 电机连接结构Posted on 2007/07/26 by LT2ABB机器人本体(机械臂)需要六个自由度,所提供的动力来自于6个三相交流伺服电机(Servo Motor),每个交流电机除了三组线圈绕组导线外,还有其他部件的引出线:一组接PTC,一组接刹车(Brake),还有编码器(Resolver)有三组导线。
6个电机的刹车电路并联成一路,PTC温度检测6个是串联成一路。
6个编码器的电路与SMB相连。
六个电机动力绕组由驱动单元(Drive Unit)供电。
机器人不工作时,六个电机的刹车电路不通电,电机依靠刹车片摩擦固定,经过减速器后,整个机械机构死锁。
工作时,电机通电,刹车电路通电,刹车片松开,电机依靠磁场固定。
某个电机温度异常时,PTC总阻值变大,控制器报警停止工作。
德系的工业机器人系统中,对于机器人停止运动,定义了3种模式,比如KUKA的工业机器人分别定义了Stop 0 ,Stop 1,Stop 2 (*注1)。
这种定义模式是与机器人的机械结构和电气结构相关联的。
对于此,读者应该先了解工业机器人上伺服电机的结构,以及伺服电机驱动器(放大器)的供电模式。
前面LT 有篇文章介绍了ABB Robot 电机连接结构,机器人的机械制动主要靠伺服电机里面的刹车(Brake) 机构。
一旦刹车释放,伺服电机轴的转动就会受到阻力。
(如右图,黑色部分代表刹车,蓝色部分为电机转子,工作时两者分离,制动时两者贴合摩擦。
)而对于伺服电机驱动器的供电模式,工业机器人电气系统的典型结构是串联两个接触器,而这两个接触器的吸合放开控制,由机器人的安全电路模块来控制。
再看如何使运动的机器人停止运动,方法1、通过驱动器,使电机减速;2、直接切断驱动器供电,释放电机刹车,靠刹车片摩擦来制动。
(是不是有点类似汽车驾驶的制动,一种可以用发动机来制动,一种可以打开离合,用脚刹来制动。
)所以两种制动方法结合起来,就组成了机器人的运动停止模式。
1Stop 0直接切断驱动器供电,同时释放刹车。
2Stop 1先驱动器控制减速制动,然后再切断驱动器供电,同时释放刹车。
(KUKA是1秒后切断电源*注2)3Stop 2只通过驱动器减速制动,不切断驱动器供电,不释放刹车。
考虑一下,对于机器人运动轨迹的影响?答案显而易见的,Stop 0 的停止模式,运动是不受控的,所以机器人停止时,TCP 可能偏移了路径;而Stop 1 和Stop 2 的模式,运动是受驱动器减速控制的,机器人停止时,TCP 会停在路径上。
P.S.为什么要介绍这个呢?因为在工业设备使用过程中,安全是个很重要的话题,Bruce (于仁颇黎) 在他的blog中多次提到过安全问题。
了解了工业机器人的运动停止模式,那么我们就可以更好的规划现场布局和编制工业机器人程序。
在后面的文章,LT 将会用到本文所提到的知识点,敬请期待。
* 注1 : 参考《库卡系统软件5.2、5.3、5.4 最终用户操作及编程指南》page13~14* 注2 : 当驱动器制动超时时,会启用stop0在上一篇文章里《浅谈工业机器人的运动停止》,LT 从机器人的动力链方面出发介绍了工业机器人的三种停止模式,实际上这三种模式也是遵循标准EN 60204的。
EN 60204 将停止分为三大类,原文如下:9.2.2 Stop functionsThere are three categories of stop functions as follows:- stop category 0: stopping by immediate removal of power to the machine actuators (i.e. an uncontrolled stop – see 3.56);- stop category 1: a controlled stop (see 3.11) with power available to the machine actuators to achieve the stop and then removal of power when the stop is achieved;- stop category 2: a controlled stop with power left available to the machine actuators.再回到机器人系统上,如果我们给机器人发出了停止信号,机器人并不是能立即瞬间停止运动。
设想一下汽车驾驶员所做的一个刹车过程,我们考虑最极端的情形,当一辆高速行驶的汽车突然发现前面车辆突然停车,而且自身也没其他道路可走,驾驶员所能做的就是努力踩下刹车并祈祷赶快停止(这里我们不考虑赛车手做180度转弯的情况XD ),不然就与前车追尾了。
从眼睛观察到前车异常并传送给大脑然后大脑下达大脚踩下刹车这一过程,属于人这个控制系统自身的反应时间,在这段时间里,汽车仍然在全速前进。
踩下刹车后,刹车片就参与制动直至运动停止,这一段汽车前进的距离就是刹车距离。
对于机器人系统,要停下来,同样要考虑这两个过程。
一是从控制系统接收到停止信号并处理到切断电源或即将执行电机制动这段过程,总线、处理器等模块会造成时间延迟,机器人仍然会运动并通过一段距离。
二是电机刹车(Brake)释放后,电机刹车片摩擦制动,机器人要走过一段刹车距离。
或者依靠电机本身减速制动同样需要走过一段距离。
在设计系统layout 时,这个停止距离是必须要考虑的因素。
汽车行驶要保持安全距离谨防追尾事故,机器人现场系统同样也是如此。
工业机器人的运动停止-刹车测试好莱坞大片《危情时速》讲述了一个高速的火车在无人掌控的情况下,逐渐加速,直至速度大到怎么也停不住的故事,又名《煞不住》。
结局当然是我们的美国英雄克服重重艰辛,进入列车控制室,把刹车手柄拉下。
就这么简单。
刹车能不重要?!下面我们要谈谈运动的工业机器人怎么能有效停下来。
在目前的工业机器人系统中,机械部分运转动力来源还是伺服电机。
下图就是一种伺服电机的剖面图。
其机械制动就是依靠电机里面的刹车机构(见下图,以某个KUKA机器人培训PPT中的截图来说明,本文目前只讨论机械刹车),当发生stop 0 的运动停止时,就依靠刹车来制动。
如果,刹车失效的话?在该停的时候没能停下来,有可能就会发生像7.23动车追尾一样的严重事故。
刹不住导致高速撞击将会让机器人和工件工具甚至现场人员承受不可预料的后果,尽管发生这类情况的几率很小。
所以相关的工业机器人都提到一个安全测试-刹车测试,目的是在可控的状况下,检测电机的刹车是否能正常运作。
那具体是怎么样的呢?我们来查阅最出名的工业机器人品牌ABB,其产品IRB7600 的产品手册,找到了Brake Testing 一节。
ABB的手册是这样来描述how to test 的:1、移动机器人各轴到承受重力最大的位置;2、在控制柜上操作使电机Motor OFF,即使电机掉电;3、检查机器人是否偏离了步骤1的位置。
由此来判刹车功能是否正常。
如果没有移动,那么刹车就是完好的。
(注1*)1.2.3.4. Brake testingWhen to testDuring operation the holding brake of each ax is motor wear normally. A test may be performed to determine whether the brake can still perform its function.How to testThe function of the holding brake of each axis motor may be checked as detailed below: 1. Run each manipulator axis to a position where the combined weight of the manipulator arm and any load is max imized (max. static load).2. Switch the motor to the MOTORS OFF position with the Operating mode selector on the controller.3. Check that the axis maintains its position.If the manipulator does not change position as the motors are switched off, then the brakefunction is adequate.那么,我们怎么知道机器人是否偏离了步骤1的位置呢?ABB 的产品手册上没有详细介绍,难道就是用肉眼看了?汗-_-!随后LT 在查阅ABB 工业机器人safemove 白皮书时,发现ABB 介绍safemove 过程中,对刹车检测做了详细的介绍。