追赶法(经典计算)
数学追赶问题计算公式

数学追赶问题计算公式在咱们学习数学的过程中,有一个特别有趣的知识点,那就是追赶问题。
说起这个追赶问题啊,它就像是一场你追我赶的比赛,充满了挑战和乐趣。
咱们先来说说追赶问题常见的计算公式。
比如说,有甲和乙两个人,甲在前面跑,速度是 V1 ,乙在后面追,速度是 V2 ,开始的时候两人相距 S ,经过时间 t 后乙追上了甲。
那这个时候,追赶问题的基本公式就是:S = (V2 - V1)×t 。
这个公式看起来简单,但是用起来可大有学问。
咱们来举个例子哈,有一天我在公园里散步,看到两个小朋友在玩追逐游戏。
前面的小朋友小明跑得挺快,速度大概是 3 米每秒,后面的小朋友小刚速度能达到 4 米每秒。
一开始他们相距 10 米,那小刚啥时候能追上小明呢?咱们就可以用这个公式来算算。
首先,V1 就是小明的速度 3 米每秒,V2 是小刚的速度 4 米每秒,S 是 10 米。
代入公式就是:10 = (4 - 3)×t ,算一下就知道 t = 10 秒。
也就是说,10 秒后小刚就能追上小明啦。
再比如说,在公路上,一辆汽车 A 以 60 千米每小时的速度行驶,另一辆汽车 B 以 80 千米每小时的速度追赶,两车一开始相距 50 千米。
那 B 车追上 A 车需要多长时间?同样的,V1 是 60 千米每小时,V2 是80 千米每小时,S 是 50 千米。
代入公式 50 = (80 - 60)×t ,算出 t = 2.5 小时。
追赶问题可不只是在这些简单的例子里出现哦。
想象一下,在田径赛场上,长跑运动员之间的追逐;或者是在动物世界里,猎豹追捕羚羊的场景,其实都能用到咱们这个追赶问题的计算公式。
而且啊,在实际生活中,追赶问题的应用也特别广泛。
就像咱们坐地铁的时候,两列地铁先后出发,可能就会存在追赶的情况;还有物流运输中,不同速度的货车送货,也可能涉及到追赶的时间计算。
总之,这个数学中的追赶问题计算公式虽然简单,但用处可真不小。
追赶问题方程解题公式
追赶问题方程解题公式英文回答:Formula for Solving Pursuit Problems.In a pursuit problem, a pursuer is trying to catch a runner who has a head start. The pursuer's speed is u, and the runner's speed is v. The head start is d.The time taken by the pursuer to catch the runner is given by the following formula:t = d / (u v)。
Derivation.Let's assume that the pursuer starts chasing the runner at time t = 0.At time t, the pursuer has traveled a distance of ut.At the same time, the runner has traveled a distance of vt + d.When the pursuer catches the runner, the distances traveled by the pursuer and the runner are equal. Therefore, we have:ut = vt + d.Solving for t, we get:t = d / (u v)。
Example.A police car is chasing a robber. The police car'sspeed is 100 km/h, and the robber's speed is 80 km/h. The robber has a head start of 20 km.How long will it take the police car to catch the robber?t = d / (u v)。
追赶法(Thomas算法)
二、解三对角线性方程组的追赶法 定理1:满足引理1条件的三对角方阵A有如下形式的 唯一的克劳特分解。
p1 a2 A= pn
p2 a3 pn 1 an
1 q1 1 q2 =PQ 1 qn 1 1
其中
p1 = b1 (i = 1,2,, n 1) qi = ci pi p = b a q (i = 2,3,, n ) i i i 1 i
解三对角线方程组Ax = f可化为求解两个三角形 方程组
Py = f
Qx = y
(1) 解 Py = f
p1 a2 ( P, f ) = p2 a3 pn 1 an f1 f2 f3 pn f n
得
{
y1 = f1 / p1
yi = ( f i ai yi 1 ) / piຫໍສະໝຸດ (i = 2,3,, n )
( 2) 解 Qx = y
1 q1 1 q2 1 qn 1 1
x1 y1 x2 = y2 x y n n
得
xn = y n
xi = yi qi xi +1
i = n 1 , , 2 ,1
作业: P50 习题11
§2-4
追赶法(Thomas算法 算法) 追赶法 算法
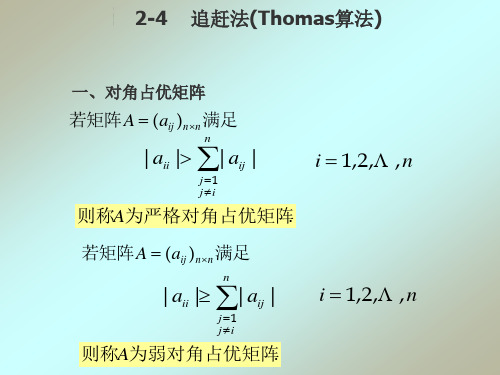
一、对角占优矩阵
若矩阵A = ( aij )n× n 满足
|aii |> ∑|aij |
j =1 j ≠i ≠i
n
i = 1 , 2 , , n
则称A为严格对角占优矩阵.
若矩阵A = ( aij )n× n 满足
|aii | ∑|aij | ≥
j =1 j ≠i
n
i = 1 , 2 , , n
则称A为弱对角占优矩阵.
追赶法的数学理论

1、 追赶法的数学理论设系数矩阵为三对角矩阵则方程组Ax=f称为三对角方程组。
设矩阵A非奇异,A有Crout分解A=LU,其中L为下三角矩阵,U为单位上三角矩阵,记可先依次求出L,U中的元素后,令Ux=y,先求解下三角方程组Ly=f 得出y,再求解上三角方程组Ux=y。
事实上,求解三对角方程组的2追赶法将矩阵三角分解的计算与求解两个三角方程组的计算放在一起,使算法吏为紧凑。
其计算公式为:二、追赶法的算法和流程图算法:1) u(1)=r(1)/a(1),v(1)=c(1)/a(1).2)dui k=2,3,…n-1,zuo yi xia cao zuo:(1)u(k)=(r(k)-u(k-1)*b(k))/(a(k)-v(k-1)*b(k)).(2)v(k)=c(k)/(a(k)-v(k-1)*b(k)).3)u(n)=r(n)-u(n-1)*b(n))/(a(n)-v(n-1)*b(n)).4)x(n)=u(n).5)dui k=n-1,…,2,1,ji suan x(k)=u(k)-v(k)*x(k+1).三、追赶法的Matlab实现functionx=chase (a,b,c,f)chasen=length(b);ifn-1==length(a)fori=n-1:-1:1a(i+1)=a(i);endend%将a设置为n维向量c(1)=c(1)/b(1);f(1)=f(1)/b(1);fori=2:n-1b(i)=b(i)-a(i)*c(i-1);c(i)=c(i)/b(i);f(i)=(f(i)-a(i)*f(i-1))/b(i);endf(n)=(f(n)-a(n)*f(n-1))/(b(n)-a(n)*c(n-1)); fori=n-1:-1:1f(i)=f(i)-c(i)*f(i+1);endx=f;四、追赶法的算例实现clear all;a=[-4,-4,-4,-4];b=[1,1,1];c=[1,1,1];r=[1,1,1,1]; n=length(a);b=[0,b];u(1)=r(1)/a(1);v(1)=c(1)/a(1);for k=2:n-1u(k)=(r(k)-u(k-1)*b(k))/(a(k)-v(k-1)*b(k)); v(k)=c(k)/(a(k)-v(k-1)*b(k));endu(n)=(r(n)-u(n-1)*b(n))/(a(n)-v(n-1)*b(n)); x(n)=u(n);for k=n-1:-1:1x(k)=u(k)-v(k)*x(k+1);endfprintf('Èý¶Ô½Ç·½³Ì×éµÄ½âΪ\n') for k=1:nfprintf('x(%1d)=%10.8f\n',k,x(k)) end>> li10_24fun三对角方程组的解为x(1)=-0.36363636x(2)=-0.45454545x(3)=-0.45454545x(4)=-0.36363636>>。
追赶法,高斯消元法,逆矩阵法,迭代法——解线性方程组精仪学院马金玉
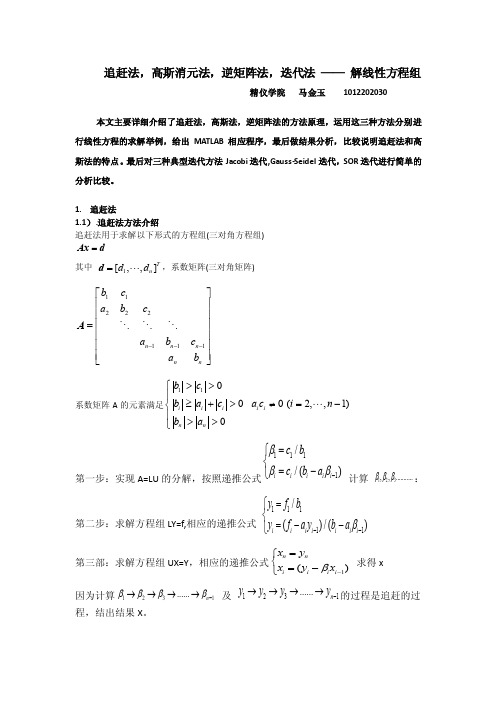
追赶法,高斯消元法,逆矩阵法,迭代法 —— 解线性方程组精仪学院 马金玉 1012202030本文主要详细介绍了追赶法,高斯法,逆矩阵法的方法原理,运用这三种方法分别进行线性方程的求解举例,给出MATLAB 相应程序,最后做结果分析,比较说明追赶法和高斯法的特点。
最后对三种典型迭代方法Jacobi 迭代,Gauss-Seidel 迭代,SOR 迭代进行简单的分析比较。
1. 追赶法1.1).追赶法方法介绍追赶法用于求解以下形式的方程组(三对角方程组)d Ax =其中 1[,,]T n d d =d ,系数矩阵(三对角矩阵)11222111n n n n n b c a bc a b c a b ---⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦A系数矩阵A 的元素满足1100 0 (2,,1)0i i i i i n n b c b a c a c i n b a ⎧>>⎪≥+>≠=-⎨⎪>>⎩第一步:实现A=LU 的分解,按照递推公式1111//()i i i i i c b c b a βββ-=⎧⎨=-⎩ 计算 123,,...........βββ:第二步:求解方程组LY=f,相应的递推公式 11111/()/()i i i i i i i y f b y f a y b a β--=⎧⎨=--⎩ 第三部:求解方程组UX=Y ,相应的递推公式1()n nii i i x y x y x β-=⎧⎨=-⎩ 求得x因为计算1231......n ββββ-→→→→ 及 1231......n y y y y -→→→→的过程是追赶的过程,结出结果X 。
1.2).追赶法解线性方程组的matlab实例解线性方程组第一步:编写M文件如下:function [x,y,beta]=zhuiganfa(a,b,c,f)%a,b,c是三对角阵的对角线上的元素,f是自由项.n=length(b);beta(1)=c(1)/b(1);for i=2:nbeta(i)=c(i)/(b(i)-a(i)*beta(i-1));endy(1)=f(1)/b(1);for i=2:ny(i)=(f(i)-a(i)*y(i-1))/(b(i)-a(i)*beta(i-1));endx(n)=y(n);for i=n-1:-1:1x(i)=y(i)-beta(i)*x(i+1);enddisp(sprintf('k x(k) y(k) beta(k)')); for i=0:n-1disp(sprintf('%d %15.4f %15.4f %15.4f',i,x(i+1),y(i+1),beta(i+1))); end追赶法M文件程序截图如图1所示图1 追赶法M文件程序截图第二步:根据所求方程,在命令窗口中输入如下命令,并按ENTER 键确认。
七年级追赶问题的知识点

七年级追赶问题的知识点追赶问题是七年级数学中的基础知识点之一,是指两个物体在不同速度下相遇的过程。
在实际生活中,追赶问题经常被用于汽车,火车等交通工具的行驶距离等的计算。
一、基本概念追赶问题涉及到时间,速度和距离等基本概念。
其中,时间是指两个物体相遇所用的时间;速度是指物体在单位时间内所走的距离;距离是指两个物体相遇时的距离。
二、解题步骤解决追赶问题可以按照以下几个步骤进行:1.明确问题:题目中含有相遇或者追上的词语,通常都是追赶问题。
2.设定变量:根据题目情况,设定需要求解的变量,例如:时间,速度或者距离等。
3.建立方程:根据变量之间的关系建立方程,通常是利用距离=速度 ×时间这个公式建立方程。
4.简化方程:通过整理方程和代入数值等方法,将复杂方程简化为一元一次方程。
5.解方程:通过解一元一次方程求出需要求解的变量。
三、例题解析1.问题描述:小明骑自行车出发,从A点向B点方向出发,小红也从A点向B点方向出发。
小明行驶的速度为10km/h,小红行驶的速度为15km/h。
如果小红比小明晚出发0.5小时,那么小红追上小明的位置在哪里?解题步骤:1.明确问题:小明和小红的相遇问题,是追赶问题。
2.设定变量:假设小明和小红从相遇时刻开始走了x小时,设小明和小红两人相遇的距离为d km。
3.建立方程:小明走的距离为10x km,小红走的距离为15(x-0.5) km,因为两人相遇,所以有10x+15(x-0.5)=d。
4.简化方程:化简得到25x-7.5=d。
5.解方程:得出x=0.3,d=5.625。
因此小红追上小明的位置在距离A点5.625km的地方。
2.问题描述:小王和小李在田径场上跑步,小王跑得比小李快20米每分钟,如果小李跑了10分钟后,小王开始跑步,那么小王需要多长时间才能追上小李?解题步骤:1.明确问题:小王追上小李的问题,是追赶问题。
2.设定变量:设小王跑了x分钟,小李已经跑了10分钟+ x分钟,设小王和小李相遇的距离为d米。
数值分析追赶法实验报告
x(4) = y(4)
For k = 3 To 1 Step -1
x(k) = y(k) - m(k) * x(k + 1)
—2—
Next For n = 1 To 4 Print "方程组的解为"; x(n) Next End Sub 实验结果:
—3—
xn yn xi yi ixi1
(i n 1,n 2,,2,1)
—1—
实验报告
辽宁科技大学 研究生 学院(系)
课名:数值分析
题目:追赶法
2012 年 10 月 9 日
班级:研 12 姓名:
学号:
专业:机械工程 任课教师:
实验程序:
Private Sub Command1_Click()
Dim y(4), x(4), m(4), c(3), b(4), a(4), f(4)
For i = 2 To 3
m(i) = c(i) / (b(i) - a(i) * m(i - 1))
Next
y(1) = f(1) / b(1)
For j = 2 To 4
y(j) = (f(j) - a(j) * y(j - 1)) / (b(j) - a(j) * m(j - 1))
Next
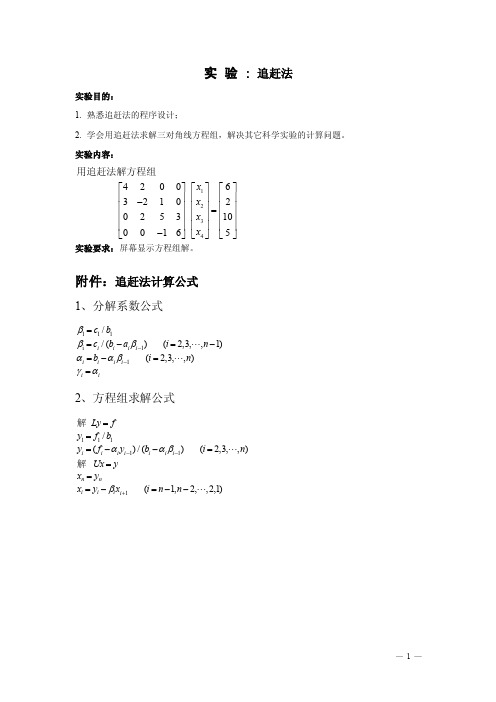
1、分解系数公式
1 c1 / b1 i ci / (bi aii1) (i 2,3,,n 1) i bi ii1 (i 2,3,,n) i i
2、方程组求解公式
解 Ly f
y1 f1 / b1 yi ( fi i yi1) / (bi ii1) 解 Ux y
(i 2,3,,n)
实 验 : 追赶法
实验目的:
1. 熟悉追赶法的程序设计;
解三对交线方程组的追赶法2

一、理论基础
解三对交线方程组的追赶法
三对角线方程组的一般形式: 三对角线方程组的一般形式:
b1 c1 x1 f1 a b c x f 2 2 2 2 2 M M O O O ( 7.1) a i bi ci x i = f i 或 Ax = f M M O O O a i ≠ 0 a n−1 bn−1 cn−1 x n−1 f n−1 且 bi ≠ 0 c i ≠ 0 an bn x n f n i = 2, L,n − 1 3, (1) | b1 |>| c1 |> 0 , | bn |>| an |> 0 其中, 满足条件 满足条件: 其中,A满足条件: (7.2) ( 2) | bi |≥| ai | + | ci |, (ai ci ≠ 0, i = 2,L , n − 1)
例4.4.1(P89) 4.4.1(P89)
解(7.1)的追赶法计算公式 7.1) 分解计算公式( (1)分解计算公式( A = L′U ): β 1 = c1 b1 − a β i1 , β i = c i ( bii − a i iβ i −−1)) ( i = 2, L , n − 1) (2)求解L′y = f 逆推公式
三、数值稳定性
其中A满足 满足( 定理17 定理17 设有三对角线方程组 Ax = f ,其中 满足(7.2)式, α 满足: 则由追赶法计算公式得到 { i }, {β i } 满足: β i = ci (bi − a i β i −1 ) (1) 0 < β i < 1, ( i = 1,2,L, n − 1); ( 2) 0 < c i ≤ bi − a i < α i < bi + a i , ( i = 2, L , n − 1); ( 3 ) 0 < bn − a n < α n < bn + a n | 分析: 要证 而此式中含有 分析 (1)要证 β i < 1, 只要证 α i |=| bi − a i β i −1 |> c i , 而此式中含有 β i −1,因此可用归纳法证明。 、(3) 用三角不等式即可得证。 因此可用归纳法证明。 (2)、 用三角不等式即可得证。 c1 显然成立。 < 1显然成立。 证明: 证明:(1) 0 < β 1 = b1 假设 0 < β i −1 < 1, 下证 0 < β i < 1, | 事实上, 事实上,α i |=| bi − a i β i −1 |≥| bi | − | a i || β i −1 | >| bi | − | a i |≥| c i |
追赶法(源自#3-4)
【附注】 解三对角方程组的追赶法设已知方程组AX D =是三对角方程组,其 矩阵形式为b c a b c a b c a b x x x x d d d d n n n n n n n n n 1122211112112100 -----⎡⎣⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥ (3-40) 可以证明,若系数矩阵A 满足如下条件:(1) b i ≠0(2) b a c i i i ≥++-11 ()0≤≤i n(3) b a c i i i ≥+ ()0≤≤i n则三对角方程组(3-40)用追赶法可以稳定求解。
这里的条件(2)、(3)称为“对角占优”。
考察三对角方程组具有如下特点:首尾两个 方程各只含两个未知数,其余方程各含三个未知 数,而且后一个方程包含前一个方程的两个未知 数。
追赶法的基本思想是采用依次消元的方法, 依次从前一个方程“解”出一个未知数代入到下 一个方程,谓之“追”;代到最末一个方程时, 只剩下一个未知数,于是该方程可解。
然后将所 得到的解依次回代到前面的方程,解出全部未知 数,谓之“赶”。
前后合一,故称追赶法。
为了导出追赶法的计算公式,将式(3-40)写 成方程组形式b xc xd a x b x c x d a x b x c x d a x b x c x d a x b x d i i i i i i i n n n n n n n n n n n n 111212122232111211111+=++=++=++=+=⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪-+------- (3-41) 由方程组(3-41)第一式解出x 1211111x b c b d x -= 令:u c b 111= ,v d b 111= (3-42)x v u x 1112=- (3-43) 将式(3-43)和(3-42)代入到方程组(3-41)第二式解 出x 2x v u x 2223=- (3-44) 其中:u c b a u 22221=- v d a v b a u 2221221=-- (3-45) 依次做下去,由方程组(3-41)第i 式解出x i x v u x i i i i =-+1 (3-46) 其中:u c b a u i i i i i =--1v d a v b a u i i i i i i i =----11 (3-47) 最后,由方程组(3-41)第n 式解出x nx d a v b a u v n n n n n n n n =--=--11(3-48) 因为最后一个方程只剩一个未知数x n ,所以只有 v n ,没有u n 。
追赶法(Thomas算法)
二、解三对角线性方程组的追赶法 定理1:满足引理1条件的三对角方阵A有如下形式的 唯一的克劳特分解。
p1 a2 A pn
1 q1 1 q2 =PQ 1 qn 1 1
1 q1 1 q2 1 qn 1 1
x1 y 1 x y 2 2 x y n n
得
xn yn
xi yi qi xi 1
p2 a3 pn 1 an
其中
p1 b1 i 1,2,, n 1 qi ci pi p b a q i 2,3,, n i i i 1 i
解三对角线方程组 Ax f可化为求解两个三角形 方程组
Py f Qx y
(1) 解Py f
p1 a2 ( P, f ) p2 a3 pn 1 an f1 f2 f3 pn f n
得
y1 f1 / p1
yi fi ai yi 1 / pi
i 2,3,, n
(2) 解Qx y
§ 2-4
追赶法(Thomas算法)
一、对角占优矩阵
若矩阵A (aij )nn 满足
|aii | |aij |
j 1 j i
n
i 1 , 2 , , n
则称A为严格对角占优矩阵 .
若矩阵A (aij )nn 满足
|aii | |aij |
j 1 j i
n
i 1 , 2 , , n
则称A为弱对角占优矩阵 .
有一类方程组, 形式为:
追击问题的公式全部

追击问题的公式全部
追击问题的公式取决于具体的背景和条件。
下面列举了一些常见的追击问题公式:
1. 追及问题的公式:
设追赶者的速度为v1,被追赶者的速度为v2,开始时刻两者之间的距离为d。
在t时刻,追赶者追及被追赶者,此时两者之间的距离为0。
则根据两者的速度和距离之间的关系,可以得到追及问题的公式:
v1 * t = v2 * t + d
2. 相向而行问题的公式:
设两个物体相向而行,速度分别为v1和v2,开始时刻两者之间的距离为d。
在t时刻,两者相遇,此时两者之间的距离为0。
根据两者的速度和距离之间的关系,可以得到相向而行问题的公式:
v1 * t + v2 * t = d
3. 追及问题的逆问题公式:
设追赶者的速度为v1,被追赶者的速度为v2,开始时刻两者之间的距离为d。
要求在t时刻追赶者追到被追赶者,此时两
者之间的距离为0。
根据两者的速度和距离之间的关系,可以得到追及问题的逆问题公式:
v1 * t = v2 * (t + d/v1)
这些是追击问题中常用的公式,但具体问题需要根据实际情况进行分析和推导。
matlab追赶法求解三对角方程组
matlab追赶法求解三对角方程组追赶法是一种求解三对角方程组的有效方法,可以通过简化矩阵的求解过程来提高计算效率。
以下是使用追赶法求解三对角方程组的具体步骤:1. 将三对角矩阵表示为下三角矩阵L、上三角矩阵U和对角矩阵D的乘积形式:A=LDU,其中L是下三角矩阵,U是上三角矩阵,D是对角矩阵。
2. 将方程组Ax=b转化为LDUx=b。
3. 首先使用前向代入法(forward substitution)解下三角方程Ly=b,其中y是临时向量。
4. 然后使用对角方程Dz=y解决z=D^-1y,其中z是临时向量。
5. 最后使用后向代入法(backward substitution)解上三角方程Ux=z,得到方程组的解x。
追赶法的时间复杂度为O(n),相比于高斯消元法等其他方法,追赶法在求解三对角方程组时具有更快的计算速度。
在MATLAB中可以使用专门的函数tridiag来实现追赶法,示例如下:```matlabfunction x = tridiag_solver(a, b, c, d)n = length(b);% 前向代入for i = 2:nm = a(i) / b(i-1);b(i) = b(i) - m * c(i-1);d(i) = d(i) - m * d(i-1);end% 后向代入x = zeros(n, 1);x(n) = d(n) / b(n);for i = n-1:-1:1x(i) = (d(i) - c(i) * x(i+1)) / b(i);endend```其中a、b和c分别是三对角方程组的次对角线、主对角线和超对角线上的元素,d是方程组的右侧常数向量。
函数返回方程组的解x。
解三对交线方程组的追赶法

VS
矩阵元素的微小变化
在三对交线方程组中,矩阵元素的微小变 化可能会导致解的巨大变化。这种敏感性 使得追赶法在面对某些问题时表现出数值 不稳定性。
提高数值稳定性和减小误差方法
选择合适的算法参数
在追赶法中,可以通过选择合适的算法参数来提高数值稳定性。例如,可以采用部分选主元策略来避免矩阵元素的微 小变化对解的影响。
优缺点分析
优点
追赶法具有计算量小、存储量低、易于编程实现等优点。对于大规模的三对角 线性方程组,追赶法通常比其他方法更加高效。
缺点
追赶法的适用范围有限,仅适用于系数矩阵为三对角矩阵的线性方程组。此外, 当系数矩阵不满足对角占优等条件时,追赶法可能无法收敛或收敛速度较慢。
Part
02
三对交线方程组数学模型建立
问题描述与定义
三对交线方程组
在二维平面上,给定三对直线,每对直线相交于一个点,这三对交线构成的方程组称为三对交线方程 组。
求解目标
通过给定的三对交线信息,求解出这三对直线的交点坐标。
数学模型构建方法
直线方程表示
在二维平面上,一条直线可以用一般式方程 $Ax + By + C = 0$ 表示,其中 $A, B$ 不同时为0。
THANKS
感谢您的观看
回代过程
从最后一个方程开始,依次将已知量代入方程求 解,得到未知量的值。此过程称为回代过程。
关键算法实现技巧
存储优化
追赶法中的系数矩阵是三对角 的,因此可以采用一维数组进 行存储,节省存储空间。
消元技巧
在消元过程中,需要注意消元 顺序和消元系数的选择,以确 保消元过程的稳定性和效率。
回代技巧
在回代过程中,需要按照正 确的顺序将已知量代入方程 求解,避免计算错误。
追赶法(Thomas算法)

定理1:满足引理1条件的三对角方阵A有如下形式的 唯一的克劳特分解。
p1 a2 p2
1 q1
1 q2A Nhomakorabea
a3 pn1
an
pn
=PQ
1 qn1
1
其中
qpi1
b1 ci
pi
i 1,2,, n 1
得
xi yi qi xi1
i n 1,,2,1
作业:
P50 习题11
感谢您的下载让小编的努力能帮助到您, 最后一页是小编对你的谢谢哦,提醒一下, 下载好了几个全部自己看一遍,把用不上 的删除哦!包括最后一页!
yi fi ai yi1 / pi i 2,3,, n
(2) 解Qx y
1
q1 1
q2
1
qn1
1
x1 x2
y1 y2
xn yn
xn yn
pi
bi
aiqi1
i 2,3,, n
解三对角线方程组 Ax f可化为求解两个三角形 方程组
Py f Qx y
(1) 解Py f
p1
f1
a2 p2
f2
(P, f )
a3
f3
pn1 an
pn
f
n
得
y1 f1 / p1
追赶法(经典计算)
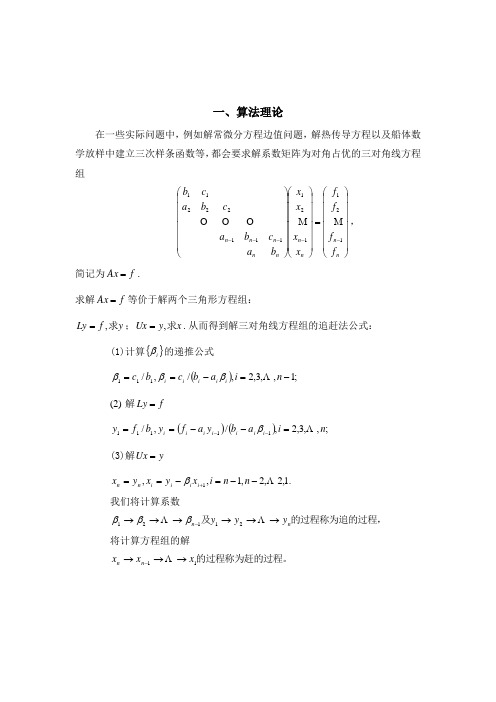
一、算法理论在一些实际问题中,例如解常微分方程边值问题,解热传导方程以及船体数学放样中建立三次样条函数等,都会要求解系数矩阵为对角占优的三对角线方程组⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-----n n n n n n n n n f f f f x x x x b a c b a c b a c b 12112111122211M M O O O , 简记为f Ax =. 求解f Ax =等价于解两个三角形方程组:y f Ly 求,=;x y Ux 求,=.从而得到解三对角线方程组的追赶法公式:(1)计算{}i β的递推公式();1,,3,2,/,/111-=-==n i a b c b c i i i i i Λβββ(2) 解f Ly =()();,,3,2,/,/11111n i a b y a f y b f y i i i i i i i Λ=--==--β(3)解y Ux =.1,2,2,1,,1Λ--=-==+n n i x y x y x i i i i n n β我们将计算系数的过程称为追的过程,及n n y y y →→→→→→-ΛΛ21121βββ将计算方程组的解的过程称为赶的过程。
11x x x n n →→→-Λ二、算法框图三、算法程序#include <stdio.h>#include <math.h>#include<stdlib.h>#define N 20double a[N], b[N], c[N-1], f[N], r[N];int n;void LUDecompose(); // LU分解void backSubs(); // 回代void main(){printf("请输入方程的维数n=");scanf("%d",&n);getchar();if(n>N||n<=0){printf("由于该维数过于犀利, 导致程序退出!");return;}printf("\n输入下三角元素\n");printf("输入%d个a值: ", n-1);for (int i=1; i<n; i++)scanf("%lf", &a[i]);getchar();printf("\n输入主对角线元素\n");printf("输入%d个b值: ", n);for (i=0; i<n; i++)scanf("%lf", &b[i]);getchar();printf("\n输入上三角元素\n");printf("输入%d个c值: ", n-1);for (i=0; i<n-1; i++)scanf("%lf", &c[i]);getchar();printf("\n输入%d个方程组右端项: \n", n);for (i=0; i<n; i++)scanf("%lf", &f[i]);getchar();LUDecompose();backSubs();printf("\n线性方程组的解为: \n");for (i=0; i<n; i++)printf("x%d=%lf\n", i+1, f[i]);}void LUDecompose(){ //α被b取代, β被c取代, 以节省存储空间c[0]=c[0]/b[0];for(int i=1;i<n-1;i++){r[i]=a[i];b[i]=b[i]-r[i]*c[i-1];c[i]=c[i]/b[i];}r[i]=a[i];b[i]=b[i]-r[i]*c[i-1];}void backSubs(){ // y被f取代, x也被f取代, 以节省存储空间f[0]=f[0]/b[0];for(int i=1; i<n; i++)f[i]=(f[i]-r[i]*f[i-1])/b[i];f[n-1]=f[n-1];for(i=n-2;i>=0;i--)f[i]=f[i]-c[i]*f[i+1];}四、 算法实现例1.用该程序计算三对角线方程组⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛2100012100012100012100012A --------=, ⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=00001b 计算其方程组的解。
TDMA追赶法

做三次样条曲线时,需要解三对角矩阵(Tridiagonal Matrices)。
常用解法为Thomas Algorithm,又叫The tridiagonal matrix algorithm (TDMA)。
它是一种基于高斯消元法的算法,分为两个阶段:向前消元forward elimination和回代backward substitution。
本文以一个6乘6矩阵为例,介绍一下使用TDMA的求解过程。
1.范例求解步骤1:将矩阵变为上三角矩阵首先要把上面公式中的系数矩阵变为一个上三角矩阵。
第一行:将上式除以b1:可写作:所以矩阵方程可写为:第二行:将变换后的第一行乘以a2,再与第二行相减,即可消去x1,得:所以新的矩阵方程为:同理可推,第三行:第四行:第五行:第六行:最后得到新的上三角矩阵公式为:步骤2:求解x逆序可以求出,如下:2. 一般性公式:注意:使用TDMA求解,系数矩阵需时diagonally dominant,即:3. 实现代码(C语言)void tdma(float x[], const size_t N, const float a[], const float b[], float c[]){size_t n;c[0] = c[0] / b[0];x[0] = x[0] / b[0];for (n = 1; n < N; n++) {float m = 1.0f / (b[n] - a[n] * c[n - 1]);c[n] = c[n] * m;x[n] = (x[n] - a[n] * x[n - 1]) * m;}for (n = N - 1; n-- > 0; )x[n] = x[n] - c[n] * x[n + 1];}(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)。
追赶机制计算公式
追赶机制计算公式
追赶机制是指在多个参与者追赶同一个目标时,根据参与者之间的距离和速度差异来计算追赶的结果。
常见的追赶机制计算公式有以下几种:
1. 相对速度追赶机制:假设有两个参与者A和B,其中A的速度为Va,B的速度为Vb,A到B的距离为d。
则追赶机制的结果可以用以下公式计算:
追赶时间 = d / (Va - Vb)
2. 一维追赶机制:假设有两个参与者A和B,其中A的初始位置为Xa,速度为Va,B的初始位置为Xb,速度为Vb。
则追赶机制的结果可以用以下公式计算:
追赶时间 = (Xb - Xa) / (Va - Vb)
3. 二维追赶机制:假设有两个参与者A和B,其中A的初始位置为(Xa, Ya),速度为(Vxa, Vya),B的初始位置为(Xb, Yb),速度为(Vxb, Vyb)。
则追赶机制的结果可以用以下公式计算:追赶时间 = sqrt((Xb - Xa)^2 + (Yb - Ya)^2) / sqrt((Vxb - Vxa)^2 + (Vyb - Vya)^2)
这些公式可以根据具体的追赶场景和参与者的属性进行调整和
扩展。
需要注意的是,这些公式都是基于一些假设和简化条件得出的近似结果,实际追赶过程可能还受到其他因素的影响。
追赶法构造过程

追赶法构造过程追赶法仍然保持LU 分解特性,它是一种特殊的LU 分解。
追赶法充分利用了系数矩阵的三对角特点,而且使之分解更简单,得到对三对角线性方程组的快速解法。
解出。
及可由时,当,表示,则三对角方程的矩阵若记的计算公式,为:和的及的元素于是得计算,,,有:由矩阵乘法及相等定义y Ux d Ly LU A d Ax d d d d p b q n k c q a p b q q U p L n k c b p q a q p b q T n k k k k k k k k k i i i k k k k k k k k k =====-========+==--------),,,(),,3,2(),,3,2(21111111111111 γγγγγ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡----n n nn n n n n q q q p p p b a c b a c b a c b Doolittle 1221132111222111111γγγ 分解形式矩阵2) 追赶法算法1.输入变量个数n 、系数矩阵对应的三个向量a,b,c 、常数项b2. For k=2,3,…,n2.1 如果b k-1=0,则输出“追赶法失败”提示并终止2.2 a k ⇐ a k /b k-12.3 b k ⇐b k - a k *c k-12.4 d k ⇐d k - a k *d k-13.For k=n,n-1,…,13.1 x k ⇐ (d k - c k *x k+1)/b k时不能进行。
消元法的缺点,即当在消元法,因此也存来源于空间,但是因为追赶法节省了计算时间和存贮程,。
追赶法的特殊求解过法次数仅有较简单,计算量、乘除追赶法。
组的方法亦称为追赶法用这组公式解线性方程,,,分解的计算公式:综合以上,求解出计算公式为:0451,,1)(,,3,21,,2,1)(,,3,2111111111111=-⎪⎪⎪⎩⎪⎪⎪⎨⎧-=-==-==-====--=-===-==+---+-k k k k k k n n n k k k kk k k k k k k k k k k k nn n k k k k q Gauss Gauss n n k q x c y x q y x y p d y n k c p b q q a p d y b q Doolittle n n k q x c y x q y x nk y p d y d y注:因为三对角矩阵的非零元素都集中在三条对角线上,因此只用三个向量a,b,c来存储系数矩阵,这样可以把二维数据的存储变为一维数据存储。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、算法理论
在一些实际问题中,例如解常微分方程边值问题,解热传导方程以及船体数学放样中建立三次样条函数等,都会要求解系数矩阵为对角占优的三对角线方程组
⎪⎪⎪⎪⎪⎪⎭
⎫
⎝⎛=⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎪⎭⎫ ⎝
⎛-----n n n n n n
n n n f f f f x x x x b a c b a c b a c b 121121111
22211
, 简记为f Ax =.
求解f Ax =等价于解两个三角形方程组:
y f Ly 求,=;x y Ux 求,=.从而得到解三对角线方程组的追赶法公式:
(1)计算{}i β的递推公式
();1,,3,2,/,/111-=-==n i a b c b c i i i i i βββ (2)…
(3)
解f
Ly =
()();,,3,2,/,/11111n i a b y a f y b f y i i i i i i i =--==--β
(4)解y Ux =
.1,2,2,1,,1 --=-==+n n i x y x y x i i i i n n β
我们将计算系数
的过程称为追的过程,及n n y y y →→→→→→- 21121βββ 将计算方程组的解
的过程称为赶的过程。
11x x x n n →→→-
—
二、算法框图
;
\
三、 算法程序
#include <> #include <> #include<> #define N 20
double a[N], b[N], c[N-1], f[N], r[N]; int n;
(1) void LUDecompose();
⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛2100012100012100012100012A --------=⎪⎪⎪
⎪⎪
⎪⎭
⎫
⎝⎛=00001b 回车。
(2) 显示出 请输入下三角元素 输入4个a 值:-1 -1 -1 -1,回车。
(3) 显示出 请输入主对角线元素 输入5个b 值:2 2 2 2 2 ,回车。
(4) !
(5)
显示出 请输入上三角元素 输入4个c 值:-1 -1 -1 -1,回车。
(6) 显示出 请输入5个方程组右端顶:1 0 0 0 0,回车。
其解为⎪⎪⎪⎩⎪
⎪⎪⎨⎧166667
.0333333.0500000.0666667.0833333
.0
例2.用该程序计算三对角线方程组
⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛310001310001310
0013100013A =, ⎪⎪
⎪
⎪⎪
⎪
⎭
⎫
⎝⎛=00011b 计算其方程组的解。
解:运行程序
(1)显示出 请输入方程组的维数:n=5.,回车。
(2)显示出 请输入下三角元素 输入4个a 值:1 1 1 1,回车。
(3)显示出 请输入主对角线元素 输入5个b 值:3 3 3 3 3 ,回车。
(4)显示出 请输入上三角元素 输入4个c 值:1 1 1 1,回车。
(5)显示出 请输入5个方程组右端顶:1 1 0 0 0,回车。
其解为⎪⎪⎪⎩⎪
⎪⎪⎨⎧--013889
.0041167.0111111.0291667.0236111
.0。