E悬挂运动控制系统(E题)
e型多连杆式独立悬架原理
e型多连杆式独立悬架原理一、悬架系统的作用和意义悬架系统是指汽车底盘上的一套装置,主要用于支撑和连接车身与车轮之间,起到缓冲和减震作用,使车辆在行驶过程中更加平稳、舒适。
悬架系统的设计和选择直接影响着汽车的操控性、稳定性和驾驶舒适度。
二、e型多连杆式独立悬架的特点e型多连杆式独立悬架是一种先进的悬架系统,它采用了多连杆的设计,能够提供更好的悬架运动控制和减震效果。
相比传统的扭力梁式悬架或麦弗逊式悬架,e型多连杆式悬架能够更好地保持车轮与地面的接触,提高悬挂刚度和稳定性。
三、e型多连杆式独立悬架的工作原理1. 由于车辆在行驶过程中会受到地面的不平和冲击,悬架系统的主要任务是通过减震器和弹簧来吸收和减轻这些冲击和震动。
e型多连杆式独立悬架采用了多连杆的结构,通过多个连杆和减震器的配合,能够更好地控制和调节车轮的运动。
2. 在e型多连杆式悬架中,车轮通过减震器和弹簧连接到车身上,而车轮与车身之间还通过多个连杆相连接。
这些连杆的连接点分布在车轮和车身之间的不同位置,通过调整连杆的长度和角度,可以控制车轮的运动范围和角度。
3. 当车辆行驶时,车轮受到地面的冲击力作用,会产生上下和前后的运动。
减震器通过阻尼作用来减少车轮的弹簧回弹和振动,使车轮保持与地面的接触,提高车辆的操控性和稳定性。
4. 同时,通过调整连杆的长度和角度,可以控制车轮的运动范围和角度。
例如,在转弯时,内侧车轮需要更大的车身倾斜角度,而外侧车轮需要更小的车身倾斜角度,以提供更好的悬架运动控制和转弯稳定性。
5. e型多连杆式独立悬架还可以通过调整减震器的硬度和连杆的刚度来适应不同的驾驶条件和路面状况。
例如,在高速行驶时,可以增加减震器的硬度和连杆的刚度,提高悬挂刚度和稳定性;而在行驶在崎岖的路面上,可以减小减震器的硬度和连杆的刚度,提高悬挂的柔软性和舒适性。
四、e型多连杆式独立悬架的优点1. e型多连杆式独立悬架相比传统的扭力梁式悬架或麦弗逊式悬架,具有更好的悬挂刚度和稳定性,能够提供更好的悬架运动控制和减震效果。
悬挂运动控制系统的设计
T c n l g .G n h u 3 10 ) e h o o y a z o 4 0 0
维普资讯
l 。 _ |
。
_ 。’
●
悬 挂
运动 控制系统的设计
t e D s g f S s e d d M v m n o t o S s e h e in o u p n e o e e tC n r l y tm
2 悬挂运动控制系统的软件设计 敏 件 用 C语 言 编 写 实现 电机 转 速 控 制 ,圆 轨
L石 - 聂
—-——_ L—广—— T J l ●
厂
标 望 运 速 。 和希 的 行 度
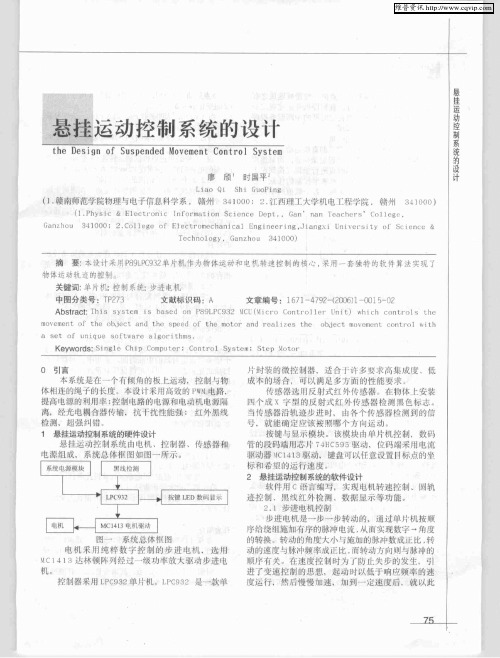
L _ L9 1 一按 L教显 迹 制 黑 红 检 、 据 示 功 — 一 P3 —_ 键E 码示J 控 、 线 外 测 数 显 等 能 叫 C2 D J _ 21 耋 鼍 . j . l l 一M4 } + C吣跏动l _ ] 赢黼 莓 喾
图一 系统总体框图 电机 采用纯 粹数 字拉 制的 步进 屯机 ,选 J = I 4 MI C 3达林顿阵列经过一级功率放 大驱 动步进 电 4l 机。 控制器采用 L C 3 P 9 2单片机。L C 3 是 一 P9 2 款单 的转换 转 动的角度大小与施加的脉冲数成正比 . 转 动的速度 与脉冲频率成l 比, E 而转动方向则与脉冲的 顺序有关 在速度控 制时为了防止失步的发生,引 进 了变速控 制的思想 ,起 动时以低于 响应频率 的速 度运行 .然后慢慢加速, 加到一定速度 后 就以此
大学生电子设计竞赛题目方向

大学生电子设计竞赛题目方向1)仪器仪表方向:音频信号分析仪:2021年a题数字取样示波器:2021年c题简易频谱分析仪:2021年c题简易逻辑分析仪:2021年d题低频相位测量仪:2021年c题数字存储示波器:2001年b题频率特性测量仪:1999年c题数字工频多用表:1999年b题简易数字频率计:1997年b题轻便rlc测量仪:1995年d题仪器仪表方向训练重点:内容:包含信号产生、采集、存储、分析、处理、显示、控制等信号处理环节中的大部分或全部。
类型:分成时域分析处置和频域分析处置两大类。
难点:强调速度、处理能力、显示性能等。
需要通过构建新技术硬件平台及运用信号处理算法来实现。
系统中的部分任务需要在训练阶段完成。
训练:dds任一信号产生、高速/宽带演示电路、滤波器、高速adc/dac取样与录像、高速数据存储(fifo)、算法(fft、卷积、有关、数字滤波等)、表明技术(lcd、绘图、实时曲线等)、弱实时性mammalian多任务软件设计、fpga/cpld与单片机的USB、仪器仪表原理、各类电参数测量、等内容。
2)电路系统方向:宽带直流放大器:2021年c题轻便程控滤波器:2021年d题正弦信号发生器:2021年a题宽带放大器:2021年b题压往下压l/c振荡器:2021年a题任一波形发生器:2001年a题轻便测量放大器:1999年a题录音与录像系统:1999年e题新颖信号源制作:1995年b题电路系统方向训练重点:内容:偏重概念和指标。
涉及到各类经典单元模块电路,及其基本概念、基本原理和新实现方法、性能指标测试方法等。
类型:分成功能型(轻在新方法)和指标型(轻在崭新设计思路)两大类。
难点:特别强调指标,通常经典设计、通用型ic就是难以完成的。
训练:(程控)放大器、(程控)滤波器、振荡器、dds任一信号产生、基本演示调理电路、电性能指标测试(电阻、增益、频宽…)、拓展设计思路等。
3)功率电子方向:光伏发电演示装置:2021年a题电能搜集充电器:2021年e题开关型稳压电源:2021年e题数控恒流源:2021年f题三相正弦变频电源:2021年g题高效d类放大器:2001年d题直流稳定电源:1997年a题实用音频放大器:1995年a 题功率电子方向训练重点:内容:小电流、大功率、三相电、斩波、dc-ac低电压、dc-dc开关电源、变频驱动、class-d功放、光伏发电、并网、mppt算法,等电力电子领域的新技术。
电子竞赛培训

电子竞赛培训1、经验分享人员组合与分工这是很关键的,人员组合主要考虑两点:1、大家相处融洽,团队有凝聚力,在学习过程中能互相学习,互相鼓励,形成一个良好的学习氛围,要现在的话说叫:和谐;(以实例说明)2、实现较好的知识组合,即队员之间在知识、技能上扬长避短,科学互补,每组3人,可以按照软件编程、硬件制作、设计总结报告写作三部分进行分工,每个队员各有侧重,分工合作,在制作过程中及时进行分析、交流和经验总结。
(说一下三人的工作去向,洪:创业,有一次去买篮球:老板开135,最后50元成交了,现在经商中)准备过程1、要有激情,要有对电子制作的爱好,有句话大家应该很熟悉了:兴趣是最好的老师。
孔圣人说过:知之者不如好之者,好之者不如乐之者。
所以,我希望大家能够真正的乐在其中。
本来有感情基础的可以加深,还没感觉的可以培养,不过,我想大家在这么热的天气不回家避暑,而是坐在这里听我讲课,可见大家对电子制作都是很感兴趣的。
2、要冷静。
你们肯定会觉得很奇怪了,刚叫我们要有激情,这又让我们冷静,老师这不是自相矛盾吗?其实不是的,荀子说过:不积跬步,无以至千里;不积小流,无以成江海。
那我们现在有了这个到“千里之外”的目标和热情,在行动上,就要脚踏实地,一步步来,要不可能就要“大跃进”时一样,雄心壮志,到最后变成“进一退二”了。
所以我希望同学们能根据各自小组的实际情况,制定比较切实可行的计划。
3、要坚持。
当时我们那届暑假刚开始时也有大十几组参加集训,最后真正报名参加比赛的有20几组,那中间总共有多少组真正在实验室里呢?你们猜一下?只有4组,不过,我们这4组在比赛是最低的成绩是省二等奖。
我们这几组的同学现在大多是公司的技术骨干了。
我希望大家能持之以恒,比赛的准备过程也是你学习、进步、挑战自我的过程。
元器件的选购与准备1、集中采购,量大价优。
我们这的人买东西就喜欢砍价。
我和继山每次去买东西,那个老板娘都很无奈,说你们买这么少还要这么优惠。
电力传动控制系统_运动控制系统[习题解答]
![电力传动控制系统_运动控制系统[习题解答]](https://img.taocdn.com/s3/m/923d279805087632311212e5.png)
电力传动控制系统——运动控制系统(习题解答)第1章电力传动控制系统的基本结构与组成 (1)第2章电力传动系统的模型 (13)第3章直流传动控制系统 (18)第4章交流传动控制系统 (30)第5章电力传动控制系统的分析与设计* (38)第1章电力传动控制系统的基本结构与组成1. 根据电力传动控制系统的基本结构,简述电力传动控制系统的基本原理和共性问题。
答:电力传动是以电动机作为原动机拖动生产机械运动的一种传动方式,由于电力传输和变换的便利,使电力传动成为现代生产机械的主要动力装置。
电力传动控制系统的基本结构如图1-1所示,一般由电源、变流器、电动机、控制器、传感器和生产机械(负载)组成。
图1-1 电力传动控制系统的基本结构电力传动控制系统的基本工作原理是,根据输入的控制指令(比如:速度或位置指令),与传感器采集的系统检测信号(速度、位置、电流和电压等),经过一定的处理给出相应的反馈控制信号,控制器按一定的控制算法或策略输出相应的控制信号,控制变流器改变输入到电动机的电源电压、频率等,使电动机改变转速或位置,再由电动机驱动生产机械按照相应的控制要求运动,故又称为运动控制系统。
虽然电力传动控制系统种类繁多,但根据图1-1所示的系统基本结构,可以归纳出研发或应用电力传动控制系统所需解决的共性问题:1)电动机的选择。
电力传动系统能否经济可靠地运行,正确选择驱动生产机械运动的电动机至关重要。
应根据生产工艺和设备对驱动的要求,选择合适的电动机的种类及额定参数、绝缘等级等,然后通过分析电动机的发热和冷却、工作制、过载能力等进行电动机容量的校验。
2)变流技术研究。
电动机的控制是通过改变其供电电源来实现的,如直流电动机的正反转控制需要改变其电枢电压或励磁电压的方向,而调速需要改变电枢电压或励磁电流的大小;交流电动机的调速需要改变其电源的电压和频率等,因此,变流技术是实现电力传动系统的核心技术之一。
3)系统的状态检测方法。
悬挂运动控制系统的设计
悬挂运动控制系统的设计本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速...<P>本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
<BR> 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
<BR><BR> Abstract<BR>This article mainly elaborated has been hanging the movement control system merit, introduced was hanging the movement control system function, the principle and the design process. Is hanging the movement control system is one of in control engineering domain important applications, its main target is to is controlled the object the movement condition, including path, speed and position implementation check. The movement control system compares with other control systems, has the system model simply, the check algorithm is unitary, also not complex characteristic and so on non-linearity and coupling situation. Also is precisely because the movement control system can implement to the path, the running rate, the pointing accuracy as well as the repetition precision accuracy control requirement, has the broad application foreground in each category of control engineering, therefore the movement control system has at present become in the check study application domain very much significant the research direction. Through the monolithic integrated circuit to stepping monitor check, implemented the motor-driven to cause the object at on the board which inclined the movement, The control section is the SST89E52 monolithic microcomputer which SST Corporation produces primarily, with when the 1602LCD liquid crystal screen and according to turned has implemented with the user interactive, through the keyboard entry different control command, the liquid-crystal display was allowed to display the setting value and the run thecoordinates. The electrical machinery control section used LM324N four to transport puts and is connected the electronic primary device voluntarily to develop the 42BYG205 stepping monitor actuation electric circuit to implement the electrical machinery accuracy control. The algorithm partially for will suit the monolithic integrated circuit system to operate carries on optimizes many times, will reduce the microprocessor the operand. Has completed the object voluntarily the movement and according to the different setup path movement. <p class='Uux450'></p> <BR>Key words Magneto; 1602LCD; LM324N; Drive circuit <pclass='Uux450'></p> </P><P> 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
历年电赛控制组赛题
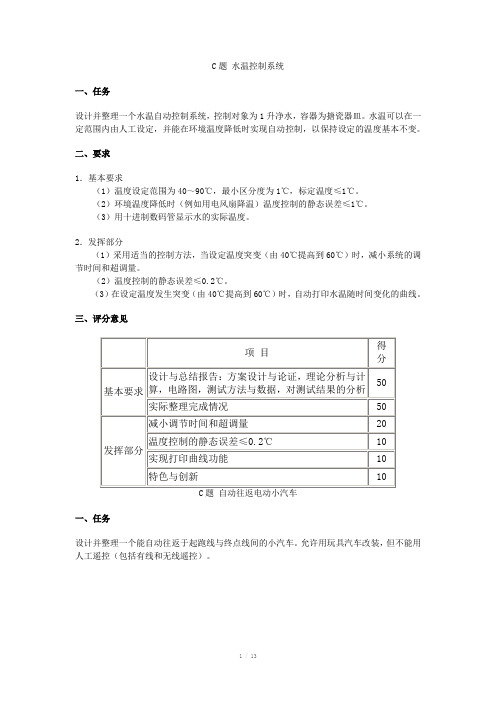
C题水温控制系统一、任务设计并整理一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。
水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。
二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。
(2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。
(3)用十进制数码管显示水的实际温度。
2.发挥部分(1)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。
(2)温度控制的静态误差≤0.2℃。
(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。
三、评分意见一、任务设计并整理一个能自动往返于起跑线与终点线间的小汽车。
允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。
在跑道的B、C、D、E、F、G各点处画有2cm宽的黑线,各段的长度如图1所示。
二、要求1.基本要求(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回)。
往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差的测量值)。
(3)D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车。
2.发挥部分(1)自动记录、显示一次往返时间(记录显示装置要求安装在车上)。
(2)自动记录、显示行驶距离(记录显示装置要求安装在车上)。
(3)其它特色与创新。
三、评分标准四、说明(1)不允许在跑道内外区域另外设置任何标志或检测装置。
(2)车辆(含在车体上附加的任何装置)外围尺寸的限制:长度≤35 cm,宽度≤15cm。
05年电子设计大赛题论文——悬挂控制系统
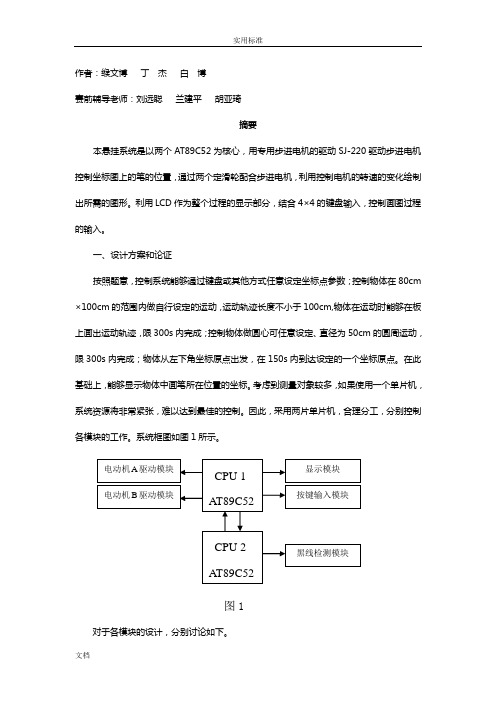
作者:缑文博丁杰白博赛前辅导老师:刘远聪兰建平胡亚琦摘要本悬挂系统是以两个AT89C52为核心,用专用步进电机的驱动SJ-220驱动步进电机控制坐标图上的笔的位置,通过两个定滑轮配合步进电机,利用控制电机的转速的变化绘制出所需的图形。
利用LCD作为整个过程的显示部分,结合4×4的键盘输入,控制画图过程的输入。
一、设计方案和论证按照题意,控制系统能够通过键盘或其他方式任意设定坐标点参数;控制物体在80cm ×100cm的范围内做自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300s内完成;控制物体做圆心可任意设定、直径为50cm的圆周运动,限300s内完成;物体从左下角坐标原点出发,在150s内到达设定的一个坐标原点。
在此基础上,能够显示物体中画笔所在位置的坐标。
考虑到测量对象较多,如果使用一个单片机,系统资源将非常紧张,难以达到最佳的控制。
因此,采用两片单片机,合理分工,分别控制各模块的工作。
系统框图如图1所示。
对于各模块的设计,分别讨论如下。
1.电动机及其的选择(1)电动机的选择方案一:使用步进电机。
其优点在于速度易于控制,可以实现快速启停,且转动角度严格可控。
可以根据驱动脉冲电流的次数计算小车的行驶距离,省去距离测量这一环节。
步进电机的功率大,速度可调,转速稳定,可以达到精密控制。
方案二:使用直流电机,用脉冲宽度调节方法,对电机进行控制。
但此方案的缺点也很明显,直流电机动起来惯性大,转速不易控制,很难达到精确地控制,误差较大。
因此,选择方案一。
(2)电动机驱动模块所用电动机是四相电动机,需要放大4路驱动信号。
方案一:采用4路三极管放大电路驱动,该方案电路复杂,可靠性难以保证。
方案二:采用专用的步进电机驱动SJ—220, SJ-220驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,带动2A以下所有的42BYG、57BYG、系列步进电机。
e型多连杆式独立悬架原理
e型多连杆式独立悬架原理引言:独立悬架系统是现代汽车悬挂系统的重要组成部分,其设计目标是提供良好的悬挂性能和舒适性,同时保持车辆的稳定性和操控性。
e 型多连杆式独立悬架是一种常见的悬挂系统,本文将介绍其原理和工作方式。
一、悬挂系统的作用悬挂系统是连接车身和车轮的重要部件,其主要作用是吸收和减震来自路面的不平坦冲击,保持车身稳定并提供舒适的乘坐感受。
悬挂系统还能保证车轮与路面的接触力,提供足够的附着力和操控性。
二、e型多连杆式独立悬架的结构e型多连杆式独立悬架由多个连杆组成,每个连杆都通过铰链连接在一起,形成一个复杂的结构。
整个悬挂系统通过这些连杆来实现车轮的独立运动,并提供悬挂性能。
三、e型多连杆式独立悬架的工作原理e型多连杆式独立悬架的工作原理基于连杆的运动学原理。
当车辆行驶时,车轮受到来自路面的冲击力,这些力会通过悬挂系统传递到车身。
悬挂系统中的连杆会根据力的大小和方向发生相应的运动,以保持车轮与路面的接触并吸收冲击力。
具体来说,e型多连杆式独立悬架由上、下控制臂、稳定杆和减振器组成。
当车轮受到冲击力时,上、下控制臂会发生相应的运动,通过铰链连接的连杆使车轮得以独立运动。
稳定杆的作用是增加悬挂系统的稳定性,减少车身的侧倾。
减振器则用于减震,通过阻尼器的作用将冲击力转化为热能,以提供舒适的乘坐感受。
四、e型多连杆式独立悬架的优势e型多连杆式独立悬架相比其他悬挂系统具有以下优势:1. 独立悬架:每个车轮都独立运动,不会受到其他车轮的影响,提供更好的悬挂性能和舒适性。
2. 稳定性:通过稳定杆的设计,能够减少车身的侧倾,提高车辆在转弯时的稳定性。
3. 操控性:e型多连杆式独立悬架能够提供更好的操控性,使驾驶员更容易控制车辆。
4. 适应性:由于连杆的设计灵活性,e型多连杆式独立悬架适用于各种类型的车辆,包括轿车、SUV和跑车等。
五、总结e型多连杆式独立悬架是一种常见且可靠的悬挂系统,通过多个连杆的运动来实现车轮的独立运动,并提供良好的悬挂性能和舒适性。
历年年全国大学生电子设计竞赛题目
2015年全国大学生电子设计竞赛题目【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)第一届(1994年)第一届(1994年)全国大学生电子设计竞赛A.简易数控直流电源B.多路数据采集系统第二届(1995年)第二届(1995年)全国大学生电子设计竞赛A.实用低频功率放大器B.实用信号源的设计和制作C.简易无线电遥控系统D.简易电阻、电容和电感测试仪第三届(1997年)第三届(1997年)全国大学生电子设计竞赛A.直流稳定电源B.简易数字频率计C.水温控制系统D.调幅广播收音机第四届(1999年)第四届(1999年)全国大学生电子设计竞赛A.测量放大器B.数字式工频有效值多用表C.频率特性测试仪D.短波调频接收机E.数字化语音存储与回放系统第五届(2001年)第五届(2001年)全国大学生电子设计竞赛A.波形发生器B.简易数字存储示波器C.自动往返电动小汽车D.高效率音频功率放大器E.数据采集与传输系统F.调频收音机第六届(2003年)第六届(2003年)全国大学生电子设计竞赛A.电压控制LC振荡器B.宽带放大器C.低频数字式相位测量仪D.简易逻辑分析仪E.简易智能电动车F.液体点滴速度监控装置第七届(2005年)第七届(2005年)全国大学生电子设计竞赛A.正弦信号发生器B.集成运放测试仪C.简易频谱分析仪D.单工无线呼叫系统E.悬挂运动控制系统F.数控恒流源G.三相正弦波变频电源第八届(2007年)第八届(2007年)全国大学生电子设计竞赛A.音频信号分析仪B.无线识别C.数字示波器D.程控滤波器E.开关稳压电源F.电动车跷跷板G.积分式直流数字电压表H.信号发生器I.可控放大器J.电动车跷跷板第九届(2009年)第九届(2009年)全国大学生电子设计竞赛A.光伏并网发电模拟装置B.声音导引系统C.宽带直流放大器D.无线环境监测模拟装置E.电能收集充电器F.数字幅频均衡功率放大器G.低频功率放大器点阵书写显示屏I.模拟路灯控制系统第十届(2011年)A.开关电源模块并联供电系统B.基于自由摆的平板控制系统C.智能小车D. LC 谐振放大器E.简易数字信号传输性能分析仪F.帆板控制系统G.简易自动电阻测试仪H.波形采集、存储与回放系统第十一届(2013年)A.单相AC-DC变换电路B.四旋翼自主飞行器C.简易旋转倒立摆及控制装置D.射频宽带放大器E.简易频率特性测试仪F.红外光通信装置G.手写绘图板J.电磁控制运动装置K.简易照明线路探测仪L.直流稳压电源及漏电保护装置第十二届(2015年)【本科组】双向DC-DC变换器(A题)风力摆控制系统(B题)多旋翼自主飞行器(C题)增益可控射频放大器(D题)80MHz-100MHz频谱分析仪(E题)数字频率计(F题)短距视频信号无线通信网络(G题)【高职高专组】LED闪光灯电源(H题)风板控制装置(I题)小球滚动控制系统(J题)获奖状况。
全国大学生电子设计方案竞赛国家奖作品集锦(山东赛区)
目录
一、山东科技大学-单工无线呼叫系统1
二、海军航空工程学院-悬挂运动控制系统1
三、中国海洋大学-悬挂运动控制系统(1>1
四、中国海洋大学-悬挂运动控制系统(2>1
五、山大学-集成运放参数测试仪(1-1>1
六、山东大学-数控直流电流源(1-2>1
七、山东大学-悬挂运动控制系统(2-1>1
八、山东大学-数控直流电流源(2-2>1
九、山东大学-悬挂运动控制系统(2-3>1
一、山东科技大学-单工无线呼叫系统
二、海军航空工程学院-悬挂运动控制系统
三、中国海洋大学-悬挂运动控制系统(1>
四、中国海洋大学-悬挂运动控制系统(2>
五、山大学-集成运放参数测试仪(1-1>
六、山东大学-数控直流电流源(1-2>
七、山东大学-悬挂运动控制系统(2-1>
八、山东大学-数控直流电流源(2-2>
九、山东大学-悬挂运动控制系统(2-3>
更多资料请参加凌阳科技大学计划网站
凌阳科技大学计划刘传登整理。
电子设计大赛控制类题目及准备[整理]
![电子设计大赛控制类题目及准备[整理]](https://img.taocdn.com/s3/m/6fbb9b9470fe910ef12d2af90242a8956becaabb.png)
001.历届的“控制类赛题”在9届电子设计竞赛中,“控制类赛题”除了1994和1995年外,其它每届都有,共有9题:000①水温控制系统(1997年C题);000②自动往返电动小汽车(2001年C题);000③简易智能电动车(2003年E题);000④液体点滴速度监控装置(2003年F题);0000⑤悬挂运动控制系统(2005年E题);000⑥电动车跷跷板(2007年F题本科组);000⑦电动车跷跷板(2007年J题高职高专组);0000⑧声音引导系统(2009年B题);000⑨模拟路灯控制系统(2009年I题)。
000其中与电动小车有关的有6题。
0002. 从历届赛题可以看到:从历届的赛题来看,主攻“控制类”赛题方向的同学需要了解和掌握:(1)系统控制方案和算法设计(2)微控制器电路模块制作和编程:如:AT89S52、MSP430F1611、MSP430F2274、Atmega128、PIC16F628A、ADuC841、C8051F022、W78E51B、STM32F103VET6等等。
(3)微控制器外围电路模块制作和编程:如键盘及LED数码管显示器模块、RS-485总线通信模块、CAN总线通信模块、无线收发器电路模块、ADC模块、DAC模块等等。
(4)传感器电路模块制作和编程:如光电传感器模块、超声波发射与接收模块、温湿度传感器模块、倾角传感器模块、角度传感器模块、音频信号检测模块等等。
(5)电机控制电路模块制作和编程:如直流电机驱动模块(L298 N)、步进电机驱动模块(L297+L298N,TA8435H)、舵机控制模块、光电隔离模块等等。
(6)放大器电路模块制作:小信号放大器电路模块、滤波器电路模块、音频放大器(7)电源电路模块制作(8)电动小车制作0003. 建议:“控制类”赛题中所涉及到的一些知识点,特别是有关自动控制理论与算法方面,对有些专业的同学来讲,在专业课程中是没有的,需要自己去搞清楚。
历届全国大学生电子设计竞赛试题

历届全国大学生电子设计竞赛试题第一届(1994年)全国大学生电子设计竞赛题目(1)简易数控直流电源(A题)(2)多路数据采集系统(B题)第二届(1995年)全国大学生电子设计竞赛题目(1)实用低频功率放大器(A题)(2)实用信号源的设计和制作(B题)(3)简易无线电遥控系统(C题)(4)简易电阻、电容和电感测试仪(D题)第三届(1997年)全国大学生电子设计竞赛题目(1)直流稳压电源(A题)(2)简易数字频率计(B题)(3)水温控制系统(C题)(4)调幅扩播收音机(D题)第四届(1999年)全国大学生电子设计竞赛题目(1)测量放大器设计(A题)(2)数字式工频有效值多用表(B题)(3)频率特性测量仪设计(C题)(4)短波调频接收机设计(D题)(5)数字化语音存储与回放系统(E题)第五届(2001年)全国大学生电子设计竞赛题目(1)波形发生器(A题)(2)简易数字存储示波器(B题)(3)自动往返电动小汽车(C题)(4)高效率音频功率放大器(D题)(5)数据采集与传输系统(E题)(6)调频收音机(F题)第六届(2003年)全国大学生电子设计竞赛题目(1)电压控制LC振荡器(A题)(2)宽带放大器(B题)(3)低频数字式相位测量仪(C题)(4)简易逻辑分析仪(D题)(5)简易智能电动车(E题)(6)液体点滴速度监控装置(F题)第七届(2005年)全国大学生电子设计竞赛题目(1)正弦信号发生器(A题)(2)集成运放测试仪(B题)(3)简易频谱分析仪(C题)(4)单工无线呼叫系统(D题)(5)悬挂运动控制系统(E题)(6)数控恒流源(F题)(7)三相正弦波变频电源(G题)第八届(2007年)全国大学生电子设计竞赛题目(1)音频信号分析仪(八)【本科组】(2)无线识别(B)【本科组】(3)数字示波器(C)【本科组】(4)程控滤波器(D)【本科组】(5)开关稳压电源(E)【本科组】(6)电动车跷跷板(F)【本科组】(7)积分式直流数字电压表(G)【高职高专组】(8)信号发生器(三)【高职高专组】(9)可控放大器(D【高职高专组】(10)电动车跷跷板(J)【高职高专组】第九届(2009年)全国大学生电子设计竞赛题目(1)光伏并网发电模拟装置(A题)【本科组】(2)声音导引系统(B题)【本科组】(3)宽带直流放大器(C题)【本科组】(4)无线环境监测模拟装置(D题)【本科组】(5)电能收集充电㈱(E题)【本科组】(6)数字幅频均衡的功率放大器(F题)【本科组】(7)低频功率放大器(G题【高职高专组D(8)LED点阵书写显示屏(H题【高职高专组D (9)模拟路灯控制系统Q题【高职高专组】)。
悬吊运动疗法SET介绍

S-E-T技术文章汇总1楼. 悬吊运动治疗(S-E-T)2楼. S-E-T治疗技术的理论与临床运用3楼. 浅谈现代骨科康复医学的一些基本概念和基本治疗技术4楼. 用于十字韧带缺损患者的本体感觉促进法5楼. 医学小常识下腰痛6楼. 悬吊训练对高水平足球运动员平衡能力、踢球速度和躯干(肌肉力量)稳定性的改悬吊运动治疗(S-E-T)一种用于骨骼肌疾病的运动和主动治疗的概念Gitle Kirkesola ,B.Sc物理治疗师手法治疗的专家运动医学的物理治疗师悬吊运动治疗是以骨骼肌疾病得到持久的改善为目的的主动治疗和运动的一个总的概念。
这种模式建立训练和康复的关键要素是什么的基础之上(这在本文中将予以描述和证实)。
这种理念已经在挪威发展了8年多他神经病的治疗中,还用来达到儿童发展训练以及健康体能运动的目的。
本文集中讨论骨骼肌疾病的治疗。
悬断和治疗系统。
诊断系统涉及肌肉耐力的测定,通过不断增加开放式和闭锁式动力链的负荷来实现。
治疗系统包增加关节活动范围、牵引、训练稳定肌系统、感觉运动的协调训练、开链运动和闭链运动,制动肌的动力训练,动,伴有长期随访的家庭个别化运动以及用来制定和修改运动计划的计算机软件。
由于目前对骨骼肌疾病的主这个概念已经发展开来。
虽然有临床经验证明悬吊运动治疗是有积极意义的,但是仍然缺乏科学依据。
所以特别性背痛的患者家庭个人锻炼的效果的随机研究和在挪威的两个公司做的关于主动治疗和个人锻炼的效果的试点度屈伸损伤有关的疾病的治疗的随机研究于1999年完成。
近年来在关于老年人的训练效果及在治疗室做主动治合使用的效果的研究中,肩关节不稳的运动治疗和运动员的训练的研究将启动。
吊带用于治疗和锻炼患者已有很长一段时间了。
德国医疗器械的先驱,schlingentisch(吊带桌)前由德国巴德洪堡的Thomsen教授发起的,所以被称为“Thomsen-Tisch” 。
在第二次世界大战期间,这种吊带伤的战士。
运动控制系统 第三版 习题解答

习题一1-1试述工业企业供电系统的构成。
答:(1)总降压变电所:工厂供电的枢纽,用于将35KV~110KV电源电压降为6~10KV,再由配电装置分别将电能送至配电所、车间变电所或高压用电设备。
由降压变压器,母线、开关设备、保护电器、测量电器等高低压配电装置组成。
(2)配电所:对大中型工厂,由于厂区大,负荷分散,常设置一个或多个配电所,用以中转电能,它只分配电能,但不改变电压。
(3)车间变电所:一个生产厂房或车间,根据情况可设置一个或多个车间变电所,将6~10KV电压降至380/220V电压,再送至各个低压用电设备。
(4)高压用电设备(5)低压用电设备1-2工业企业供电系统的常用额定电压等级及选取额定电压等级时应考虑的因素。
答:(1)330KV及以上(包括500KV、750KV):用于大电力系统输电;(2)220KV及以下:用于城乡高压、中压及低压配电;(3)110KV、35KV:也用于大型工厂内部配电网;(4)6~10KV:一般用于工厂内部,但从经济技术综合比较,最好采用10KV,除非拥有相当数量的6KV 设备;(5)380V/220V:工厂低压配电电压。
1-3统一规定各种电气设备的额定电压有什么意义?发电机、变压器、用电设备以及电网额定电压有无差别?差别的原因是什么?答:规定设备的额定电压有利于设备按系列制造,是设备正常工作时具有最好技术经济指标的电压。
(1)发电机的额定电压:考虑线路在输送负荷电流时产生的电压损失,应比电网电压高5%。
(2)变压器的额定电压:一次绕组——如果变压器直接与发电机相连,则同发电机额定电压相同,即高于电网电压5%;如果不与发电机直接相连,而是接于线路时,应与电网电压相同。
二次绕组——供电线路较长时,为弥补变压器满载时本身压降及线路压降,应比电网电压高10%;如果线路不长,只需补偿变压器满载压降,即高于电网电压5%。
(3)设备的额定电压:同电网电压相同。
1-4简述工厂供电系统电能质量的主要指标及其对用户的影响。
电子设计大赛控制类题目汇总

电子设计大赛控制类题目汇总全国大学生电子设计竞赛历年题目(1994-2011)第一届(1994年)全国大学生电子设计竞赛题目题目三简易无线电遥控系统一、任务设计并制作无线电遥控发射机和接收机。
1.无线电遥控发射机2.无线电遥控接收机二、要求1.基本要求(1)工作频率:fo=6~10MHz中任选一种频率。
(2)调制方式:AM、FM或FSK……任选一种。
(3)输出功率:不大于20mW(在标准75Ω假负载上)。
(4)遥控对象:8个,被控设备用LED分别代替,LED发光表示工作。
(5)接收机距离发射机不小于10m。
2.发挥部分(1)8路设备中的一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数。
(2)在一定发射功率下(不大于20mW),尽量增大接收距离。
(3)增加信道抗干扰措施。
(4)尽量降低电源功耗。
注:不能采用现成的收、发信机整机。
三、评分意见项目得分基本要求设计与总结报告:方案设计与论证,理论计算与分析,电路图,测试方法与数据,结果分析50 实际制作完成情况50发挥部分完成第(1)项12 完成第(2)项8 完成第(3)项 5 完成第(4)项 5 特色与创新20电子设计大赛控制类题目汇总·控制类的题目均要注意外界的干扰。
要采取一定的屏蔽措施。
·涉及到电机时要考虑控制部分和电机部分,分开供电。
双电源供电。
将电动机驱动电源与单片机以及其周边电路完全隔离,利用光电耦合传输信号。
这样做虽然不如单电源方便灵活,但可以将电动机所造成的干扰彻底消除,提高了系统稳定性。
·掌握各种算法。
第三届(1997年)C题水温控制系统一、任务设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。
水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。
二、要求1.基本要求(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。
(2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。
全国电子设计大赛——悬挂控制系统
悬挂运动控制系统摘要:本系统采用STC89C54作为控制中心,由步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。
该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。
关键词:控制核心;寻迹;步进电机;算法;定位1系统模块的方案比较与论证1.1 控制器模块根据题目要求,控制器模块主要用于各个传感器信号接收、控制物体运动、控制显示坐标及运动时间等。
对于控制器有以下二种方案。
方案一:采用FPGA为系统的控制器,FPGA可以实现各种复杂的逻辑功能,模块大,密度高,它将所有器件集成在一块芯片上,减少了体积,提高了稳定性,并且可应用EDA软件仿真、调试,易于进行功能控制。
FPGA采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模实时系统的控制核心。
通过输入模块将参数输入给FPGA,FPGA通过程序设计控制步进电机运动,但是由于本设计对数据处理的时间要求不高,FPGA的高速处理的优势得不到充分体现,并且由于其集成度高,使其成本偏高,同时由于芯片的引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作。
方案二:采用A T89S52单片机作为系统控制器。
单片机算术运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制。
由于其功耗低、体积小、技术成熟和成本低等优点,各个领域应用广泛。
并且,由于芯片引脚少,在硬件很容易实现。
因此,在本设计中采用A T89S52处理输入的数据并控制电机运动。
综合上述两种方案,方案二较为简单,可以满足设计要求。
1.2电机的选择方案一:采用直流电机。
直流电机具有最优越的调速性能,主要表现在调速方便(可无级调速)、调速范围宽、低速性能好(起动转矩大、起动电流小)、运行平稳、噪音低、效率高等方面,但是控制复杂,定位精度差,积累误差大等缺点。
方案二:采用步进电机。
步进电机具有控制简单、定位精确、无积累误差等优点。
悬吊训练疗法
悬吊训练疗法(Sling Exercise Therapy,S-E-T)SET是以持久改善肌肉骨骼疾病为目的,应用主动治疗和训练的一个总的概念集合,该疗法以主动训练和康复治疗作为关键要素,包括诊断及治疗两大系统。
前者通过逐渐增加开链和闭链运动的负荷来进行肌肉耐力测定,并结合肌肉骨骼疾病的常规检查;后果包括肌肉放松、增加关节活动范围、牵引、训练稳定肌肉系统、感觉运动协调训练、开链运动和闭链运动、活动肌动力训练、健体运动、小组训练、伴有长期随访的个体化家庭训练以及用来制定和修改运动计划的计算机软件等。
使用悬吊装置帮助患者进行康复训练已经有很长时间的历史。
在第二次世界大战期间,人们使用简易的悬吊装置用来治疗受伤的战士。
现在的悬吊装置有许多不同的形式,或是立于地面上,或是吊在天花板上。
在巧妙的悬吊系统的帮助下,身体的某部分或整个身体都可以悬挂在器械上。
治疗和训练时通过这种方式就可以摆脱重力的影响。
在挪威,自20世纪60年代以来,吊带就已被用作治疗肩关节和髋关节疾病。
在九十年代初期,挪威的物理治疗师和医生建立了密切的合作关系,他们促进了悬吊运动治疗理念的进一步发展。
在广泛的生物力学研究的基础上,挪威康复工作者创造性的提出了一系列新的训练理念与原则,在此基础上,通过大量的临床实践,发展出全新的悬吊运动治疗 (sling exercise therapy, S-E-T)的体系,初期大量应用于运动系统疾病尤其是慢性颈肩腰背疼痛的治疗,以运动系统疾病得到持久的改善为目的,目前已经进一步推广用于脑卒中和其他神经病的治疗中,还用来达到儿童发展训练以及健康体能运动的目的。
本文集中讨论运动系统疾病的治疗。
现在已证实运动组织的慢性疾病与身体的生理改变有关,如感觉和运动的控制能力失调以及肌力下降。
最重要的改变包括:感觉和运动的控制能力失调;稳定肌的力量和耐力降低;协同肌和拮抗肌的力量和耐力降低;肌肉萎缩;心血管功能减退。
悬吊运动治疗旨在恢复感觉和运动的控制能力、肌力、耐力及心血管功能以提高运动系统的整体功能。
2005年全国大学生电子设计竞赛国家奖作品集锦(山东赛区)
三
中国海洋大学-1
国家一等奖
1名
E题
《悬挂运动控制系统》
刘滨
纪风磊 王北镇 郭志强
作品介绍
本系统以解析几何坐标运算为基础,采用凌阳SPCE061A单片机控制两台高精度步进电机运动。系统配有键盘输入和LCD液晶显示,采用了单片机通讯技术,实现了强大的语音播报功能。采用优化的解析几何算法,使系统达到了高精度和高执行速度。通过测验,系统完全达到了题目的所有要求,并扩展了若干功能。
著作及自编教材10部,公开出版4部,学院出版6部:《电子技术实验教程》2004版电子工业出版社;《高频电子线路》2001版国防工业出版社;《复印机使用与维修》和《手机使用与维修》,2000版,新时代出版社;《综合电子线路实践》2000版学院教材;《电工电子实验技术》2002版学院教材;《电工电子虚拟实验技术》上下册,2002版学院教材;《综合电子线路实践》2004版学院教材;《电子系统设计》2004版学院教材。
获
奖
感
言
李芳
2005年我们使用凌阳“61板”参加了 “索尼杯”全国大学生电子设计竞赛。在平时训练和参赛过程中,我深深地体会到凌阳“61板”的精妙之处,真可谓‘麻雀虽小,五脏俱全’。从外型上看“61板”小巧精致剔透,设计简便实用,结构设计合理,操作方便灵活;在硬件接线上简单且易于查找连线错误的。此外,凌阳“61板”非常好地发挥了单片机的特色功效,性能可靠稳定,出错率低。凌阳“61板”堪称完美的单片机最小应用系统。
报告设计:文字编排合理有序、文笔流畅、层次分明、条理清晰;语句简明扼要、逻辑性强、重点突出;图例正确整洁美观,质量较高。理论分析、计算正确有据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬挂运动控制系统(E题)
一、任务
设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
二、要求
1、基本要求:
(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;
(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;
(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;
(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
2、发挥部分
(1)能够显示物体中画笔所在位置的坐标;
(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽
1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约
30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连
续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
三、评分标准
四、说明
1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,
同时尽量缩短运动时间;
2、若在某项测试中运动超过限定的时间,该项目不得分;
3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;
4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开
始运动后,不能再人为干预物体运动;
5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试
时自带。