PELCOD协议
PELCOD控制协议
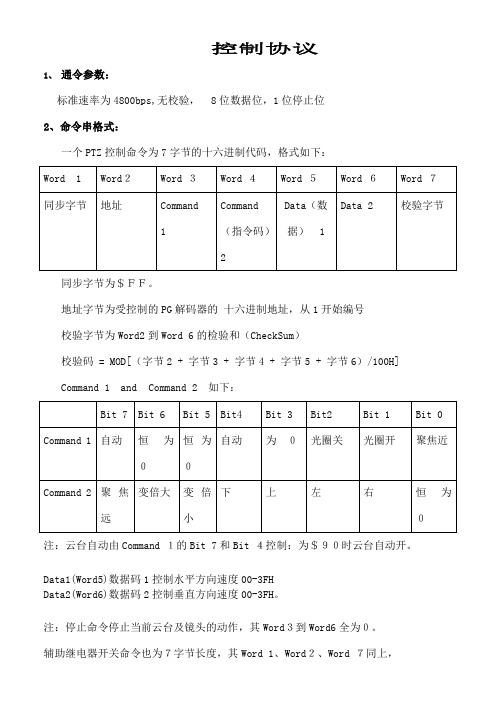
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H] Command 1 and C ommand 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 012号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCOD_P协议

PELCO D、P通讯协议一、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调用命令。
注意:网上PELCO协议版本众多,建议看家选择英文版本,中文版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, or D protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located here. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981..pelco./sites/global/en/sales-and-support/support-services/obtaining-pelco-protocol.page 二、PELCO-D协议数据格式:1位起始位、8位数据、1位停止位,无效验位。
派尔高D,P协议
1、派尔高
派尔高(Pelco)是业界久负盛名的专业研发和生产视频安保系统的全球领先的知名企业,在视频监控领域,其产品几乎成为高品质的代名词。
编辑本段
2、派尔高公司
早期,有些奥本市的学校是装设类比式摄影机与Pelco(派尔高公司)的DVR,而且还有一些IP摄影机是由Pelco视讯管理设备所管理。
3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH
4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度
6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]
以地址码0x01为例:
{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001
以上对应的停命令均是:
{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令
PELCO-P:
{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长
{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近
{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远
{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小
{0xa0,0x01,0x00,0x20,0x00,0x00,0xaf,0x21,}//变倍长
派尔高(Pelco)协议
4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度
6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]
以地址码0x01为例:
{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上
{0xa0,0x01,0x00,0x07,0x00,0x01,0xaf,0x07,}//转至预置点001
{0xa0,0x01,0x00,0x03,0x00,0x01,0xaf,0x03,}//设置预置点001
{0xa0,0x01,0x00,0x05,0x00,0x01,0xaf,0x01,}//删除预置点001
4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),在有关预制点的操作时,数据码2表示预制点值
6.ETX始终为AFH
7.校验码(XOR sum of Bytes 2-6) = 字节2 ^ 字节3 ^ 字节4 ^ 字节5 ^ 字节6
以地址码0x01为例:
{0xa0,0x01,0x00,0x08,0x00,0x30,0xaf,0x39,}//上
编辑本段
1、派尔高
派尔高(Pelco)是业界久负盛名的专业研发和生产视频安保系统的全球领先的知名企业,在视频监控领域,其产品几乎成为高品质的代名词。
编辑本段
2、派尔高公司
早期,有些奥本市的学校是装设类比式摄影机与Pelco(派尔高公司)的DVR,而且还有一些IP摄影机是由Pelco视讯管理设备所管理。
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
PELCO-D与PELCO-P协议介绍
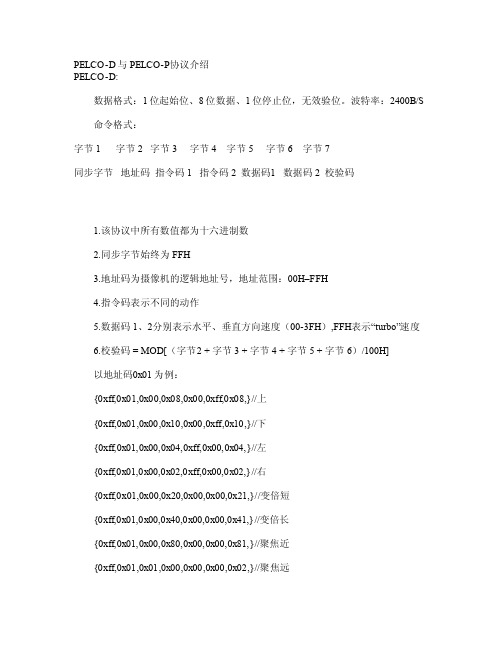
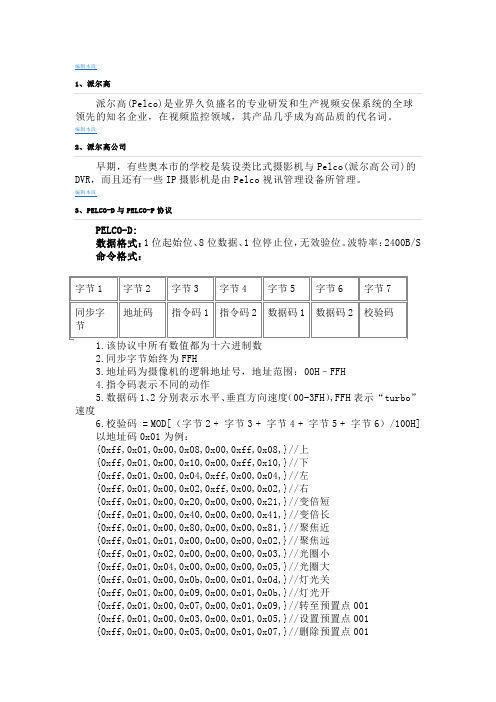
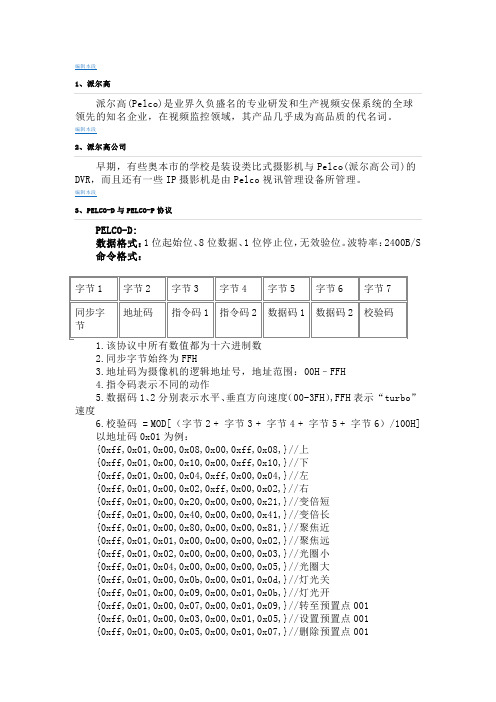
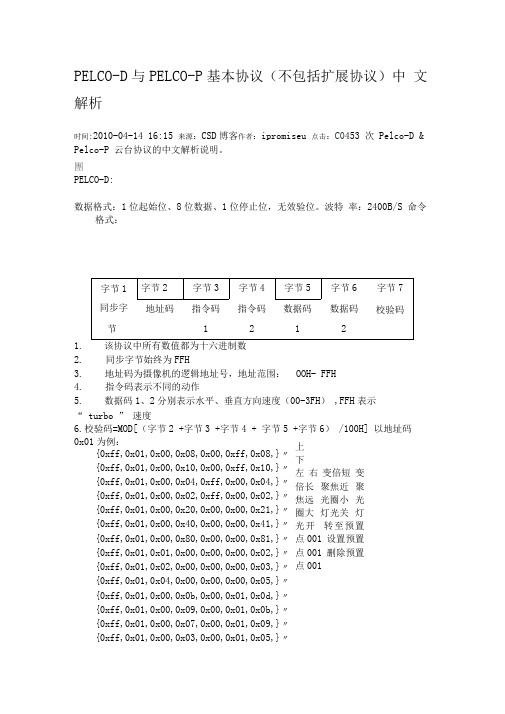
PELCO-D与PEL CO-P协议介绍P ELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 同步字节地址码指令码1 指令码2数据码1数据码2 校验码 1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FF H 4.指令码表示不同的动作 5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“tur bo”速度6.校验码= MOD[(字节2 + 字节3 + 字节4 +字节5 +字节6)/100H] 以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0x ff,0x01,0x00,0x02,0x ff,0x00,0x02,}//右{0xf f,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0x ff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xf f,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0x ff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xf f,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0x ff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELC O-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验,8位数据位,1位停止位2、命令串格式:同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(Checksum校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]Comma nd 1 and Comma nd 2 女口下:注:云台自动由的和控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例、镜头控制命令 光圈:开(按下)FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下) FF 01 04 00 00 00 05(弹起) FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21(弹起) FF 01 00 00 00 00 01 大(按下) FF 01 00 40 00 00 41(弹起) FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02(弹起) FF 01 00 00 00 00 01 远(按下) FF 01 00 80 00 00 81(弹起) FF 01 00 00 00 00 01三、辅助继电器控制命令AU X 1 : (断开) FF 01 000B 00 010D (闭合) FF01 00 09 00 01 0BAU X 2: (断开) FF 01 00 0B 00 02 0E (闭合) FF 01 00 09 00 02 0CAU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0DAU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E说明:1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01 二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO-D与PELCO-P协议区别

PELCO-D与PELCO-P协议区别PELCO-D与PELCO-P协议区别曼码协议是AD品牌的协议,通用性很好,派尔高P、D协议是派而高自己的协议,所以用矩阵控制快球,要考虑协议的问题,大部分矩阵厂家都提供协议转换器,而且大多数快球厂家也把解码器内内置多种协议,基本没有匹配问题,都是485的控制协议。
PELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S 命令格式:1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}//右{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELCO-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D与PELCO-P基本协议(不包括扩展协议)中文解析
PELCO-D与PELCO-P基本协议(不包括扩展协议)中文解析时间:2010-04-14 16:15 来源:CSD博客作者:ipromiseu 点击:C0453 次Pelco-D & Pelco-P 云台协议的中文解析说明。
團PELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S 命令格式:1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:OOH- FFH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“ turbo ” 速度6.校验码=MOD[(字节2 +字节3 +字节4 + 字节5 +字节6)/100H] 以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}〃{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}〃{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}〃{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}〃{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}〃{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}〃{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}〃{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}〃{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}〃{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}〃{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}〃{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}〃{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}〃{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}〃上下左右变倍短变倍长聚焦近聚焦远光圈小光圈大灯光关灯光开转至预置点001 设置预置点001 删除预置点001{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}〃以上对应的停命令均是{Oxff,OxO1,OxOO,OxOO,OxOO,OxOO,OxO1,}〃 停命令 PELCO-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D协议大收集

PELCO-D协议大收集本帖最后由mccs-luo 于2011-1-6 11:45 编辑D型控制协议1.云台和镜头控制命令数据格式:1位起始位、8位数据、1位停止位,无校验位。
波特率:2400B/S命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码指令码1 指令码2 数据码1 数据码2 校验码该协议中所有数值都为十六进制数,云台镜头控制命令在需保持动作时,需在1秒以内重复发码。
同步字节始终为FFH;地址码为摄像机的逻辑地址号,地址范围:00H - FFH;指令码的格式如下:BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0指令码1 0 0 0 Auto Scan 0 Iris Close Iris Open Focus Near指令码2 Focus Far Zoom Wide Zoom Tele Down Up Left Right 0(1)指令码1:BIT7,BIT6,BIT5,BIT3位始终为0;BIT4为自动扫描功能控制位(1/0:打开/关闭该功能);BIT2光圈缩小(1有效);BIT1光圈扩大(1有效);BIT0近距离聚焦(1有效);(2)指令码2:BIT7远距离聚焦(1有效);BIT6和BIT5控制摄像机的变倍,BIT6远离物体(1有效),BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下、上、左、右移动(1有效);BIT0始终为0。
(3)数据码1控制水平方向速度00-3FH(4)数据码2控制垂直方向速度00-3FH(5)校验码= MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]2.设置预置点命令和调用预置点命令:“D”型控制协议最多设置和调用64个预置点,且1-32号预置点的设置和调用命令与33-64号预置点的设置和调用命令不同。
(1)1-32号预置点设置和调用命令:设置预置点命令字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码 00 03H 00 预置点号校验码调用预置点命令字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码 00 07H 00 预置点号校验码(2)33-64号预置点的设置和调用命令设置预置点命令字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码 02H FFH 预置点号 01H 校验码调用预置点命令字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码 02H FFH 预置点号 00H 校验码例:在2号摄像机上先设置一个15号预置点,再调用这个预置点号,命令如下:设置预置点:FF 01 00 03 00 0F 13调用预置点:FF 01 00 07 00 0F17在2号摄像机上设置一个40号预置点,再调用这个预置点号,命令如下:设置预置点:FF0102FF07010A调用预置点:FF0102FF0700093.开始和停止自动扫描:在执行自动扫描命令前需先设置63号预置点和64号预置点,分别为自动扫描的左限位和右限位。
PELECO-D协议和PTZ控制
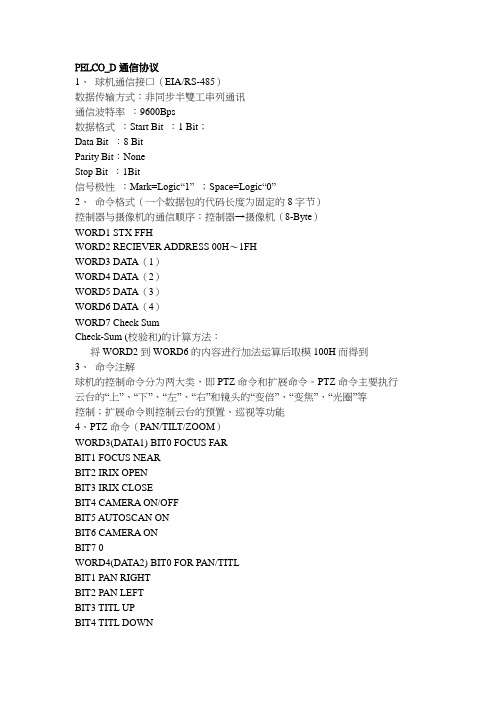
PELCO_D通信协议1、球机通信接口(EIA/RS-485)数据传输方式:非同步半雙工串列通讯通信波特率:9600Bps数据格式:Start Bit :1 Bit;Data Bit :8 BitParity Bit:NoneStop Bit :1Bit信号极性:Mark=Logic“1” ;Space=Logic“0”2、命令格式(一个数据包的代码长度为固定的8字节)控制器与摄像机的通信顺序:控制器→摄像机(8-Byte)WORD1 STX FFHWORD2 RECIEVER ADDRESS 00H~1FHWORD3 DATA(1)WORD4 DATA(2)WORD5 DATA(3)WORD6 DATA(4)WORD7 Check SumCheck-Sum (校验和)的计算方法:将WORD2到WORD6的内容进行加法运算后取模100H而得到3、命令注解球机的控制命令分为两大类,即PTZ命令和扩展命令。
PTZ命令主要执行云台的“上”、“下”、“左”、“右”和镜头的“变倍”、“变焦”、“光圈”等控制;扩展命令则控制云台的预置、巡视等功能4、PTZ命令(PAN/TILT/ZOOM)WORD3(DATA1) BIT0 FOCUS FARBIT1 FOCUS NEARBIT2 IRIX OPENBIT3 IRIX CLOSEBIT4 CAMERA ON/OFFBIT5 AUTOSCAN ONBIT6 CAMERA ONBIT7 0WORD4(DATA2) BIT0 FOR PAN/TITLBIT1 PAN RIGHTBIT2 PAN LEFTBIT3 TITL UPBIT4 TITL DOWNBIT5 ZOOM TELEBIT6 ZOOM WIDEBIT7 0WORD5(DATA3) PAN SPEED(00~3FH)WORD6(DATA4) TILT SPEED(00~3FH)PTZ命令控制说明:⒈当控制云台水平、上下方向动作或“IRIS”、“FOCUS”、“ZOOM”时需要使相应的控制位为“1”,不用控制的相应位置为“0”⒉当需要云台PAN/TILT两方向同时动作时,只需将PAN/TILT的相应控制位置“1”即可,PAN/TILT 的速度控制由WORD5/WORD6决定⒊将WORD3、WORD4的所有位置为“0”可以停止云台的动作5、扩充命令(1)、设置预置点WORD3 WORD4 WORD5 WORD600H 03H 00H XXXX=00H~3FH(PRESET NUMBER)(2)、清除预置点WORD3 WORD4 WORD5 WORD600H 05H 00H XXXX=00H~3FH(PRESET NUMBER)(3)、调用预置点WORD3 WORD4 WORD5 WORD600H 07H 00H XXXX=00H~3FH(PRESET NUMBER)(4)、全清预置点WORD3 WORD4 WORD5 WORD600H 07H 00H 77(5)、运行巡视序列WORD3 WORD4 WORD5 WORD600H 07H 00H 4CH(6)、停止巡视序列(解码器停自动)WORD3 WORD4 WORD5 WORD600H 07H 00H 60H(7)、设置预置点停留时间WORD3 WORD4 WORD5 WORD600H 03H 00 XXXX=46H,47H或48H(8)、启动自动扫描方法WORD3 WORD4 WORD5 WORD6 00H 07H 00 63H(9)、设置扫描方法起点WORD3 WORD4 WORD5 WORD6 00H 07H 00 5CH(10)、设置扫描方法终点WORD3 WORD4 WORD5 WORD6 00H 07H 00 5DH(11)、设置扫描速度WORD3 WORD4 WORD5 WORD6 00H 07H 00 XXXX=50-59H(12)、水平反转WORD3 WORD4 WORD5 WORD6 00H 07H 00 21H(13)、高速球水平复位WORD3 WORD4 WORD5 WORD6 00H 07H 00 22H(14)、解码器灯光开/关WORD3 WORD4 WORD5 WORD6 00H 07H 00 22H(15)、辅助接口一WORD3 WORD4 WORD5 WORD6 00H 07H 00 02H(16)、辅助接口二WORD3 WORD4 WORD5 WORD6 00H 07H 00 03H。
PELCO-D与PELCO-P协议介绍

{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001
PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议解析
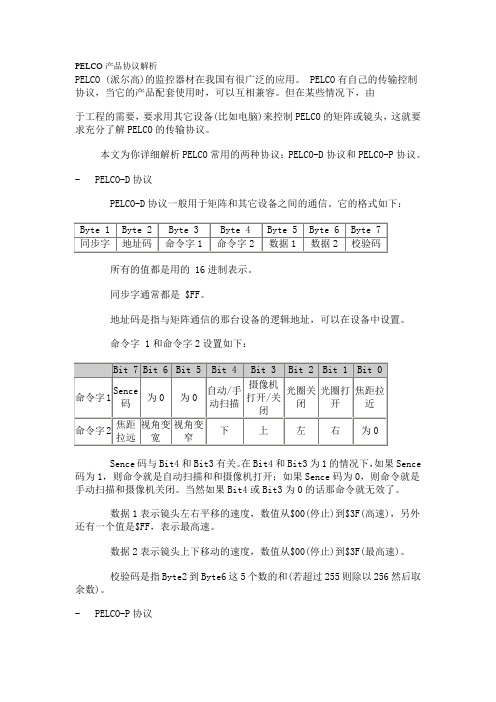
PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步字 地址码 命令字1 命令字2 数据1 数据2 校验码
以上对应的停命令均是:
{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令
PELCO-P:
数据格式:1位起始位、8位数据、1位停止位,无效验位。波特率:9600B/S
命令格式:
字节1 字节2 字节3 字节4 字节5 字节6 字节7 字节8
所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码 为0 为0 自动/手动扫描 摄像机打开/关闭 光圈关闭 光圈打开 焦距拉近
{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左
{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右
PELCO-D命令详解
1
镜头聚焦
FF,01,01,00,00,00,02
聚焦近
FF,01,00,80,00,00,81
聚焦远
FF,01,00,00,00,00,01
动作停止
北京瑞成达科技发展有限公司 镜头光圈
FF,01,20,00,00,00,21 FF,01,40,00,00,00,41 FF,01,00,00,00,00,01
N3:设定预置位停留时间(1——64s)
·68 号预置:退出巡游设置
·66 号预置:启动巡游
2
注*:RX214D 没有“CAMERA”端子,辅助开关 1(AUX1)不使用。
解码器的测试
北京瑞成达科技发展有限公司 可以下载串口调试程序,直接输入上面表格中的命令字符串,通过计算机 RS232 和 RS232/RS485 转
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
Synch Byte
Address Command 1
Command 2
Data 1
Data 2
Check Sum
所有数字为 2 位 16 进制表示。
北京瑞成达科技发展有限公司 Byte1——始终为 FF;
Byte2——解码器地址,1 号为 01,10 号为 0A; Byte3、4、5、6——具体命令; Byte7——将 Byte2 至 Byte6 求和并以两位 16 进制数字表示,超过 FF 时重新从 00 开始。
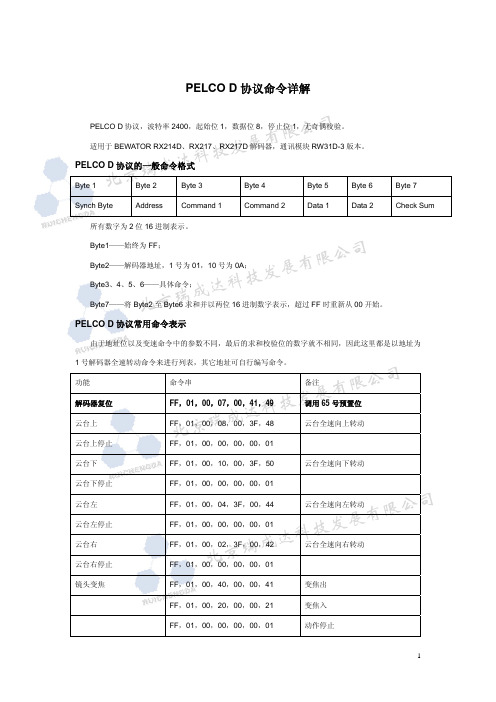
PELCO D 协议常用命令表示
由于地址位以及变速命令中的参数不同,最后的求和校验位的数字就不相同,因此这里都是以地址为
1 号解码器全速转动命令来进行列表,其它地址可自行编写命令。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO-D控制协议
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01 二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
Pelco-d控制协议
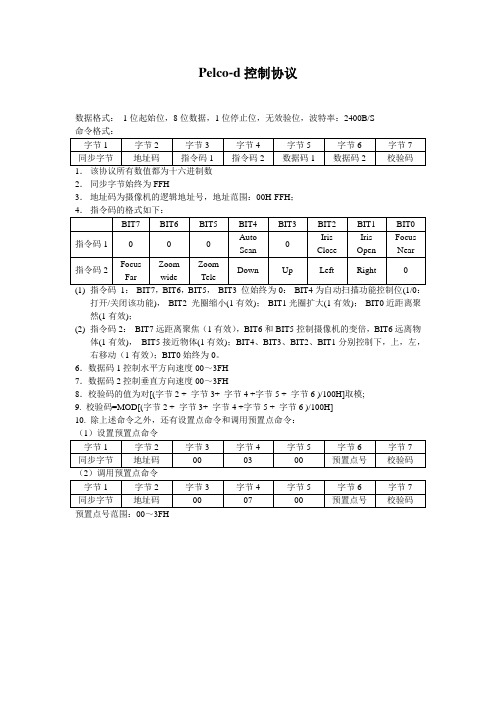
Pelco-d控制协议
数据格式:1位起始位,8位数据,1位停止位,无效验位,波特率:2400B/S
命令格式:
1.该协议所有数值都为十六进制数
2.同步字节始终为FFH
3.地址码为摄像机的逻辑地址号,地址范围:00H-FFH;
打开/关闭该功能),BIT2 光圈缩小(1有效);BIT1光圈扩大(1有效);BIT0近距离聚然(1有效);
(2)指令码2:BIT7远距离聚焦(1有效),BIT6和BIT5控制摄像机的变倍,BIT6远离物
体(1有效),BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下,上,左,右移动(1有效);BIT0始终为0。
6.数据码1控制水平方向速度00~3FH
7.数据码2控制垂直方向速度00~3FH
8.校验码的值为对[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]取模;
9. 校验码=MOD[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]
10. 除上述命令之外,还有设置点命令和调用预置点命令:
预置点号范围:00~3FH。
PELCO协议中文版
PELCO产品协议解析PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
本文为你详细解析PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence 码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
- PELCO-P协议PELCO-P协议一般采用RS-485传输,波特率为4800,1位起始位和停止位,8位数据位,无校验。
其格式如下:起始码是固定值$A0。
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
数据位1到4的意义如下:停止码是固定值 $AF 。
校验码是 Byte2 到 Byte6 这 5 个数的异或值(XOR)。
地址码是从 0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,但这些应用并不常见,限于篇幅,这里不多作介绍,若需要可从直接下载英文资料。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01 二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
Pelco-D协议
P ROTOCOL M ANUAL FORC OAXITRONE XTENDED C OAXITRON32 BIT C OAXITRON “D”(D IGITAL C OAXITRON)March 26, 1997T ABLE OF C ONTENTSLEGAL NOTICES (3)N OTICE OF D ISCLAIMER (3)P ROPRIETARY N OTICE (3)QUESTIONS (3)WHAT THIS MANUAL COVERS (4)ORIGINS (15 BIT COAXITRON) (4)FIRST EXPANSION (EXTENDED 15 BIT COAXITRON) (5)SECOND EXPANSION (32 BIT COAXITRON) (6)Extended Command Set (7)DIGITAL COAXITRON (8)INDEX (10)L EGAL N OTICESN OTICE OF D ISCLAIMERPelco makes no claims, expressed or implied, regarding the usefulness of this protocol, it’s impl e-mentation, or it’s correc tness. Any use of this protocol is the sole responsibility of the agency im-plementing the protocol. The contents of this document and the function of the protocol are sub-ject to change without notice.P ROPRIETARY N OTICEThe contents of this document are considered to be the property of Pelco. Users of this protocol agree to use the protocol only in the interests of Pelco. Any use of this protocol to Pelco’s detr i-ment is prohibited.Those receiving this protocol cannot redistribute the protocol without the expressed written con-sent of Pelco.Q UESTIONSQuestions regarding this protocol, it’s implementation, use, and distribution should be addressed to:Pelco (209) 292-1981 Voice300 West Pontiac Way (209) 292-1018 FAXClovis, California, USA 93612-5699This manual covers the two versions of the Coaxitron (see below) protocol and a 422/485 version of the protocol. The two versions of Coaxitron are divided up between the 15 bit (fixed speed only) version and the 32 bit (variable speed) version. The 422/485 version adds some framing for transmission over an asynchronous medium and is explained in the section marked “Digital Coaxitron”.This manual covers the protocols used to speak to Coaxitron series equipment and with P elco’s “D” ve r-sion receivers.Coaxitron is Pelco’s name for a method of sending control signaling from a controller to a pan and tilt, receiver driver, or camera and lens on the video signal (also known as “up the coax” or “UTC 错误!未找到引用源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PELCO D、P通讯协议
一、PELCO协议介绍
1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK 命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调用命令。
注意:网上PELCO协议版本众多,建议看家选择英文版本,中文版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, or D protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981.
二、PELCO-D协议
数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400bps.
命令格式:
1.该协议中所有数值都为十六进制数
2.同步字节始终为FFH
3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH
4.指令码表示不同的动作,在有关预制点的操作时,数据2表示预制点值
5.数据1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度
6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]
Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence码为1,则
命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
常用命令列表:
关于云台自动功能如何实现,云台的自动功能是做到解码板电路,有多种硬件电路方法,也有软件检测限位开关或者光耦中断来控制左和右自动扫描。
但上面协议表是没有自动命令,在P协议里AUTOPAN命令是CALL 99号预置位。
在D协议里是没有定义,编程者可以定义CALL #NO来实现。
D协议特殊命令控制表:
以地址码0x01为例:
{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}
协议中所有数值都为十六进制数
始终为A0H
3.地址码为摄像机的逻辑地址号,地址范围:00H–1FH
4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),在有关预制点的操作时,数据码2表示预制点值
始终为AFH
7.校验码(XOR sum of Bytes 2-6) = 字节2 ^ 字节3 ^ 字节4 ^ 字节5 ^ 字节6
常用命令列表:
P协议特殊命令控制表:
以地址码0x01为例:
{0xa0,0x01,0x00,0x08,0x00,0x30,0xaf,0x39,} The protocol uses no parity, one start bit, eight data bits, and one stop bit. The recommended baud rate is 4800 (4800, 8, N, 1, 1).
MESSAGE FORMAT
Byte 1 is always $A0
Byte 2 is the receiver address, set by DIP switch in the receiver
Byte 3-6, see below
Byte 7 is always $AF
Byte 8 is an XOR sum of Bytes 1-7
The protocol is “zero indexed” so that the hexadecimal address sent in the protocol for the first receiver is $00 which corresponds to address 1.
The bits within the “Data bytes” are broken up into two main groups. For Pan and Tilt commands, the functions are determined as follows:
PAN AND TILT COMMANDS
EXTENDED COMMAND SET
The extended command set will have bit 0 of data byte 2 set and will follow the format in the following table:
The receiver will respond with an ACK.
To accommodate features of new systems and maintain compatibility with our old systems, some functions have been added through the use of some of the unused preset functions. These are:
Preset Number Function
99Begin Auto-scan
98Begin Frame Scan
97Begin Random Scan
96Stop Scan
95Enter Menu Mode
94Remote Reset
93Set Right Limit Stop
92Set Left Limit Stop
34Home (return to 0 pan position)
33Flip
Examples:
To SET PRESET 32 in the receiver with address 1, the command string (in Hexadecimal) would be:
A0 00 00 03 00 20 AF 2C (the last byte is the XOR sum of bytes 1 through 7)
To drive receiver with address 2 LEFT at half speed:
A0 01 00 04 00 1F AF 15
四种PELCOD协议与三种PELCOP协议区别
建议编程者在做控制串口软件时,每帧命令输出时间间隔最好定义200ms/ 帧。