艾默生PSM-E10通讯
GZDW说明书(艾默生PSM-E01)
GZDW智能高频开关电源直流电源柜使用说明书SLY苏州市龙源电力工程有限公司i前言由于直流电源设备存在能危及人身安全的高电压,危及供电电网安全的操作要求,请在安装、使用设备前查阅本手册的相关内容。
声明:由于产品和技术的不断更新、完善,本资料中的内容可能与实际产品不完全相符,敬请谅解。
如需查询产品的更新情况,请联系我公司。
ii苏州市龙源电力工程有限公司3电力操作电源系统概述一 、系统原理:电力操作电源主要应用在发电厂、水电站、各类变电站中,为断路器分合闸及二次回路中的仪器、仪表、继电保护和故障照明提供直流电源。
电力操作电源系统主要由交流配电单元、充电模块、监控模块、降压单元、电池巡检单元、直流馈电单元(包括合闸分路、控制分路)、绝缘监测等几大部分组成。
由于不同的接线方式在输出馈电部分有所不同,但基本原理是一致的。
框图如图1所示:图1 电力操作电源系统原理框图系统工作原理如下:系统交流输入正常时,两路交流输入经交流切换控制电路选择其中一路输入,并通过交流配电单元给各个充电模块供电。
充电模块将输入三相交流电转换为110V 或220V 的直流,经隔离二极管隔离后输出,一方面给电池充电,另一方面给负载提供正常工作电流。
监控部分采用集中方式对系统进行监测和控制,充电模块运行参数由模块监控电路采集处理,然后通过串行通讯方式把处理后的信息传给监控模块,由监控模块统一处理后,显示在液晶屏上。
同时可通过人机交互操作方式对系统进行设置和控制,若有需要还可接入远程监控。
监控模块还能对每个充电模块进行均浮充控制,限流控制等,以保证电池的正常充电,延长电池寿命。
苏州市龙源电力工程有限公司4二、显示启动屏在确认接线无误后,合上PSM-E01监控模块外部配电开关给监控模块上电,先出现如下启动屏。
启动屏显示主信息屏启动完后,监控模块自动出现如下的主信息屏。
第一行的日期和时间交替显示,第二行显示的是合闸母线电压与负载电流,第三行显示的是系统状态(正常或告警),第四行显示的是系统进行蓄电池管理运行状态(自动或手动),以及电池状态(浮充、均充或放电)。
艾默生DCS和SIEMENSPLCDP通讯配置

(3)右键单击添加一个DP的Device:设定其地址并使能该从站设备,此处的地址一定要与PLC的DP地址一致
(4)添加数据通讯的驱动槽
这里前三槽必须添加上:既1stgeneral ID,2ndgeneralID,3rdgeneral ID 按顺序加入Profibus槽中(此处应根据GSD的不同,可能不需要添加此三项),这三个驱动槽添加完成后,接下来需要按照PLC提供的DP组态时的数据传输格式添加需要的驱动槽(参见PLC的配置通信数据影射区,一一建立。)
(5)创建信号类型:应根据PLC每个槽内数据传输的格式,如果PLC端组态为输出,则DCS端应组态为输入,PLC端为输入,则DCS端组态为输出,传输的字节数必须匹配。
而且这里创建的信号类型要与PLC的数据类型一致,上图为一个布尔量
可以一次创建AI、AO的信号
(6)当所有对应的数据均已创建完毕后,诊断Profibus设备,出现以下三个good标记,说明DCS和从站PLC的设备通讯已建立。
(9)编写收发程序
SFC14为接收程序,SFC15为发送程序,也可以用MOVE指令将数据传送到影射地址。
3、Deltav上的配置
(1)、在Deltav上导入S7-315-2DP的GSD文件,导入方法:在数据库中,右键点击ProfibusDPDevices,在弹出对话框,选择:AddDeviceDefinition…,选择GSD文件存储路径,添加GSD。
2、PLC侧的配置:新建一个S7300的从站,其步骤如下:添加一个
(1)、新建一个300站点:
(2)、硬件组态如下:
(3)、双击下图DP,再属性界面将300站配置为从站
(4)设置通讯参数,波特率和通讯地址
艾默生 E10 模块CDT-91后台通讯规约(精校版本)
艾默生网络能源文档编号软件版本文档密级有限公司共8页MONI20U111XY110G 1.10 秘密PSM-E20监控模块用CDT-91规约拟制:余先耀张志国审核:张志国标准化:魏巍批准:柳秀鹏1、概述本文描述了PSM-E20监控模块应用于直流屏时向上级监控设备提供的CDT 91通讯规约,通过本规约可以获取直流屏的各种运行参数。
2、适用范围本文艾默生网络能源有限公司的开发人员及测试人员,也适用于采用通讯方式接入我司直流屏设备的各自动化厂家。
3、引用标准本文遵守中华人民共和国电力行业标准(DL 451—91)循环式远动规约标准。
4、物理接口通讯接口:RS232/RS485串行通讯接口。
波特率:600、1200、2400、4800、9600、19200。
字符格式:1位起始位,(无校验/奇校验/偶校验, 可设),8位数据位,1位停止位。
5、帧5.1、帧结构帧结构如图1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,信息字的个数是可变的,其数值在控制字中有描述。
同步字控制字信息字1……信息字n图1、帧结构5.2、同步字本规约的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
5.3、控制字控制字共有B7~B126个字节,其组成如图2所示。
5.3.1 控制字节说明(如图3所示):E:扩展位当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。
在本规约中,此位总是为0。
L:帧长定义位当L=0时表示本帧信息字数n为0,即本帧没有信息字;当L=1时表示本帧有信息字。
在本规约中,此位总是为1。
b7b0字节控制字节B7帧类别码B8信息字数B9源站址B10目的站址B11校验码B12b7 b0E L S D 0 0 0 1图3 控制字节S:源站址定义位,D:目的站址定义位5.3.2 S与D在上行及下行信息中的定义说明:在上行信息中,S=1表示控制字中源站址有内容,源站址字节即代表信息始发站的站号,即直流屏的本机地址;D=1表示目的的站址字节有内容,目的站址字节代表主站站号。
PSM-E10监控模块CDT规约

PSM-A10监控模块远程通讯协议(电力部颁CDT-91标准)(版本号:1.0)1、概述本文描述了PSM-A10监控模块应用于直流屏时向上级监控设备提供的通讯协议(规约),通过本协议可以获取直流屏的各种运行参数,控制直流屏的运行方式,从而方便地实现四遥功能。
2、适用范围本文适用于艾默生网络能源有限公司的开发人员及测试人员,也适用于采用通讯方式接入我司直流屏设备的各自动化厂家。
3、引用标准本文遵守中华人民共和国电力行业标准(DL 451—91)循环式远动规约标准。
4、术语定义状态量:用于描述系统运行时的采集量,取值为有限的几个值,并不表示系统的故障情况。
在本协议中一般指交流当前工作路号、系统控制方式、电池充电状态、充电模块控制方式、充电模块开/关机状态等五个量,在本协议的遥信量中包括了此类量。
告警量:用于描述系统处于异常时的采集量,取值为0或1,当取值为1时表示系统有故障存在。
在本协议上送遥信量中的大部分都是此类量。
5、物理接口5.1、串行通讯口提供RS232、RS485、RS422三种串行通讯方式(注:在RS485方式下,只支持遥测和遥信命令,不支持遥调和遥控命令)。
5.2、数据传输速率提供600、1200、2400、4800、9600(缺省值)、19200、38400七种通讯波特率。
注:在NP9802、NP9802-A中,只提供1200、2400、4800、9600(缺省值)四种波特率。
5.3、字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
6、帧6.1、帧结构帧结构如图1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,图1、帧结构6.2、同步字本协议的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
6.3、控制字控制字共有B7~B126个字节,其组成如图2所示。
6.3.1 控制字节说明(如图3所示):E:扩展位当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。
直流屏PSM-E10
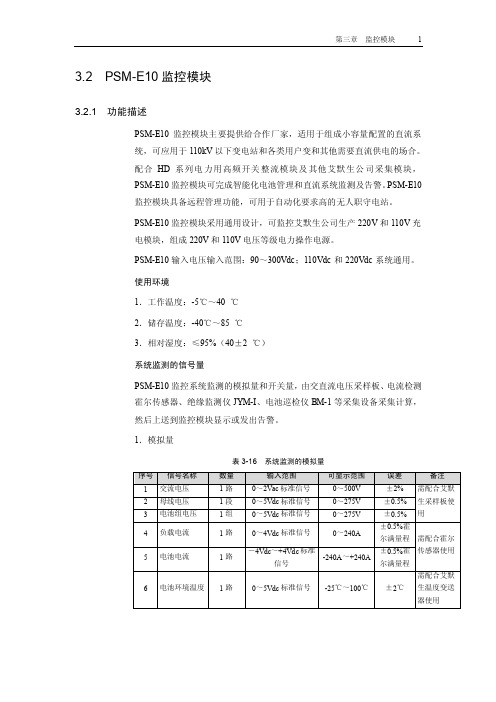
3.2 PSM-E10监控模块3.2.1 功能描述PSM-E10监控模块主要提供给合作厂家,适用于组成小容量配置的直流系统,可应用于110kV以下变电站和各类用户变和其他需要直流供电的场合。
配合HD系列电力用高频开关整流模块及其他艾默生公司采集模块,PSM-E10监控模块可完成智能化电池管理和直流系统监测及告警。
PSM-E10监控模块具备远程管理功能,可用于自动化要求高的无人职守电站。
PSM-E10监控模块采用通用设计,可监控艾默生公司生产220V和110V充电模块,组成220V和110V电压等级电力操作电源。
PSM-E10输入电压输入范围:90~300Vdc;110Vdc和220Vdc系统通用。
使用环境1.工作温度:-5℃~40 ℃2.储存温度:-40℃~85 ℃3.相对湿度:≤95%(40±2 ℃)系统监测的信号量PSM-E10监控系统监测的模拟量和开关量,由交直流电压采样板、电流检测霍尔传感器、绝缘监测仪JYM-I、电池巡检仪BM-1等采集设备采集计算,然后上送到监控模块显示或发出告警。
1.模拟量表3-16 系统监测的模拟量注:表3-16中描述的误差只是采集器采样误差,不包含信号变送器(如霍尔传感器)本身的转换误差。
上表提到的电压电流变送器需要提供参考的厂家和型号。
2.开关量表3-17 系统监测的开关量3.输出信号表3-18 系统输出信号保护与报警功能描述表3-19 系统功能3.2.2 接口及连线监控模块接口介绍大屏幕LCD液晶显示,配合前板按键,可完成设置、查阅、显示、事件记录等各项功能。
表3-20 PSM-E10监控模块后背板端子定义监控模块采集量说明监控模块是系统的数据处理中心,整个系统的数据量可分为模拟量和开关量两大类。
1.模拟量交流三相电压:由交流电压采集板A1M61S1采集。
直流母线(HM、KM)电压:由直流电压采样盒PFU31Z采集。
负载、电池电流:由霍尔传感器采集。
ModBus通讯协议在艾默生Deltav中控DCS系统与虹润智能仪表通讯中的应用

ModBus通讯协议在艾默生Deltav中控DCS系统与虹润智能仪表通讯中的应用王大安【摘要】Modbus communication protocol,developed by Modicon in 1979,has become awidely used bus protocol in industrial controlfield.Through the protocol,data collection and exchange between different equipment and control system can be realized,and this connection can even be extended to industrial control network.From the angle of practical applica-tion on water injection pump temperature monitoring,this paper introduces the design as well as the application and specific implementation method of Modbus communication protocol in the communication between Emerson DeltaV DCS control system serial communication card and HongRun intelligent display instrument on offshore platforms.Through the simple communication configuration in Emerson Deltav DCS control system,functions of remote and real-time display of tempera-ture parameters and history record have been realized for water injection pumps.%自1979年Modicon公司制定Modbus通讯协议以来,其已经成为工控领域广泛应用的工业现场总线协议。
爱默生模块及监控中文说明书
PowerMaster智能高频开关电力操作电源系统合作生产技术指导书资料版本归档日期2008-10-17BOM 编码艾默生网络能源有限公司为客户提供全方位的技术支持,用户可与就近的艾默生网络能源有限公司办事处或客户服务中心联系,也可直接与公司总部联系。
艾默生网络能源有限公司版权所有,保留一切权利。
内容如有改动,恕不另行通知。
艾默生网络能源有限公司地址:深圳市南山区科技工业园科发路一号邮编:518057公司网址:客户服务投诉热线:0E-mail第一章充电模块(必选件)1.1 HD22010-3系列1.1.1 模块简介HD22010-3系列充电模块是电力电源最主要的配置模块,广泛应用于35kV到330kV的变电站电力电源中。
HD22010-3系列充电模块采用自冷和风冷相结合的散热方式,在轻载时自冷运行,符合电力系统的实际运行情况。
型号说明产品系列产品系列见下表。
表1-1 订货信息工作原理概述以HD22010-3模块的工作原理框图如下图所示。
图1-1 HD22010-3充电模块原理图HD22010-3充电模块由三相无源PFC和DC/DC两个功率部分组成。
在两功率部分之外还有辅助电源以及输入输出检测保护电路。
前级三相无源PFC电路由输入EMI和三相无源PFC组成,用以实现交流输入的整流滤波和输入电流的校正,使输入电路的功率因素大于,以满足DL/T781-2001中三相谐波标准和GB/T 中相关EMI、EMC标准。
后级的DC/DC变换器由PWM发生器控制前级PFC输出的DC电压、经过高频变压器输出后再整流滤波输出DC电压等电路组成,用以实现将前级整流电压转换成电力操作系统要求的稳定的直流电压输出。
辅助电源在输入三相无源PFC之后,DC/DC变换器之前,利用三相无源PFC的直流输出,产生控制电路所需的各路电源。
输入检测电路实现输入过欠压、缺相等检测。
DC/DC的检测保护电路包括输出电压电流的检测,散热器温度的检测等,所有这些信号用以DC/DC的控制和保护。
PSM-E01及PSM-E02监控模块
PSM-E10C上位机协议V2-48V-MODBUS
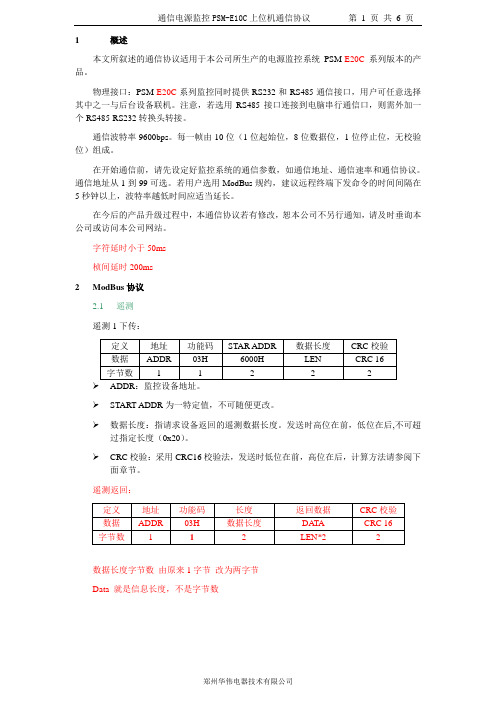
1概述本文所叙述的通信协议适用于本公司所生产的电源监控系统PSM-E20C系列版本的产品。
物理接口:PSM-E20C系列监控同时提供RS232和RS485通信接口,用户可任意选择其中之一与后台设备联机。
注意,若选用RS485接口连接到电脑串行通信口,则需外加一个RS485-RS232转换头转接。
通信波特率9600bps。
每一帧由10位(1位起始位,8位数据位,1位停止位,无校验位)组成。
在开始通信前,请先设定好监控系统的通信参数,如通信地址、通信速率和通信协议。
通信地址从1到99可选。
若用户选用ModBus规约,建议远程终端下发命令的时间间隔在5秒钟以上,波特率越低时间应适当延长。
在今后的产品升级过程中,本通信协议若有修改,恕本公司不另行通知,请及时垂询本公司或访问本公司网站。
字符延时小于50ms桢间延时200ms2ModBus协议2.1遥测遥测1下传:START ADDR为一特定值,不可随便更改。
数据长度:指请求设备返回的遥测数据长度。
发送时高位在前,低位在后,不可超过指定长度(0x20)。
CRC校验:采用CRC16校验法,发送时低位在前,高位在后,计算方法请参阅下面章节。
遥测返回:数据长度字节数由原来1字节改为两字节Data 就是信息长度,不是字节数遥测1(重要)返回DATA定义:遥信下传:数据长度指遥信量长度,1个字节包含8个遥信量。
遥信返回:注:0为备用,1为工作;0为浮充,1为均充;0为正常,1为故障;0为开机,1为关机。
遥信1(重要)2.3遥调遥调下传:DA TA REG定义:(高位在前,低位在后)遥调返回:2.4遥控遥控下传:举例:控制#2号模块关机:发送命令:01 0f 78 01 00 01控制#2号模块开机:发送命令:01 0f 78 00 00 00遥控返回:2.5错误返回:2.6CRC16校验码计算方法CRC添加到消息中时,低字节先加入,然后高字节。
CRC简单函数如下:unsigned short CRC16(puchMsg, usDataLen)unsigned char *puchMsg ; /* 要进行CRC校验的消息 */ unsigned short usDataLen ; /* 消息中字节数 */{unsigned char uchCRCHi = 0xFF ; /* 高CRC字节初始化 */ unsigned char uchCRCLo = 0xFF ; /* 低CRC 字节初始化 */ unsigned uIndex ; /* CRC循环中的索引 */while (usDataLen--) /* 传输消息缓冲区 */{uIndex = uchCRCHi ^ *puchMsgg++ ; /* 计算CRC */uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex} ;uchCRCLo = auchCRCLo[uIndex] ;}return (uchCRCHi << 8 | uchCRCLo) ;}/* CRC 高位字节值表 */static unsigned char auchCRCHi[] = {0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40} ;/* CRC低位字节值表*/static char auchCRCLo[] = {0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26, 0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5, 0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C, 0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80, 0x40} ;1通信测试举例ModBus:遥测:01 03 60 00 00 10 5A 06 遥信:01 02 70 00 00 10 63 06 :01 02 70 01 00 10 32 C6:01 02 70 02 00 10 C2 C6:01 02 70 03 00 10 93 06遥控:01 0F 78 00 00 00 4D 6B遥调:01 06 71 00 08 98 94 9C。
PSM-E10_E11 CDT
遥信信息字格式
Bn+5
8 命令格式
8.1 设定命令
设定命令只有一个下行帧,无返校、执行和撤消命令帧。控制字的帧类别码为57H, 其信息字格式如图7所示。
同步字
控制字
信息字
信息字
信息字
|——此三字内容相同——————|
b7
b0
功能码(E8H)
Bn字节
设定(C3H)
Bn+1
对象号
Bn+2
设点数(低)
Bn+3
信息字遥测量2
0x01 电池组电压
电池组电流
0x02 正母线对地电压
负母线对地电压
0x03 交流输入AB线电压
交流输入BC线电压
0x04 交流输入CA线电压
电池房温度
附录 C: 一般遥测量
一般遥测量
一般遥测量帧类别码为0xB3,控制字节为0x71,信息字定义见表10。 表10 一般遥测量信息字定义
功能码
信息字遥测量1
信息字遥测量2
0x01 第1个充电模块的输出电压
第1个充电模块的输出电流
0x02 第1个充电模块的限流点
(保留0x8000)
0x03 第2个充电模块的输出电压
第2个充电模块的输出电流
0x04 第2个充电模块的限流点
(保留0x8000)
:
:
:
0x16 第12个充电模块的输出电压 第12个充电模块的输出电流
艾默生网络能源 有限公司
共8 页
文档编号
MONI01U111XY100B
软件版本 文档密级
1.00
内部公开
PSM-E10 远程通讯 CDT 协议
拟 制:邓玉玖 审 核:柳秀鹏 标 准 化:魏巍 批 准:柳秀鹏
IM-32EA绝缘监测模块使用说明书
4=OFF
设置该模块测量 1#母线;4=ON
设置该模块测量 2#母线。
提示
使用 “艾默生” 的 PSM-E20 监控器, 选择 “JYM-2” (Modbus) 协议时,每段母线最大可扩展 16 个绝缘从机,默认 1-16#为 1 段母 线上的绝缘从机(SW1 全都设置为 4=OFF);17-32#为 2 段母线 的绝缘从机(SW1 全都设置为 4=ON)。 使用“科瑞信”的 PSMC-D10 监控器,最大可扩展 4 个绝缘从 机;PSMC-D20 监控器,最大可扩展 8 个绝缘从机;
-5-
提示
与“艾默生”、“科瑞信”监控通讯时,告警门限值是由监控 器下送,所以不须进行设置。该项设置仅对个别厂家的监控器或独 立使用时有效。
: 5.4 从机的接线方法(实例)
5.4.1 扩展 1 台从机接线示意图
IM-32EA(主机) 1# 从机
IM-32EA 2# 从机
5.4.2
扩展多台从机接线示意图.
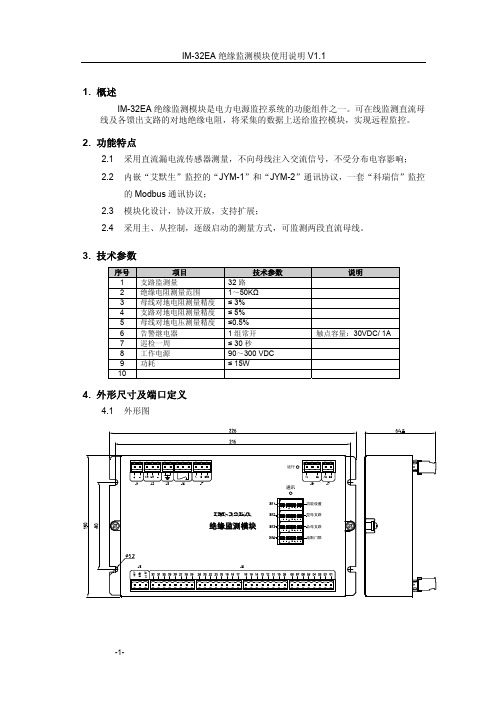
IM-32EA 绝缘监测模块使用说明 V1.1
1. 概述
IM-32EA 绝缘监测模块是电力电源监控系统的功能组件之一。可在线监测直流母 线及各馈出支路的对地绝缘电阻,将采集的数据上送给监控模块,实现远程监控。
2. 功能特点
2.1 2.2 采用直流漏电流传感器测量,不向母线注入交流信号,不受分布电容影响; 内嵌“艾默生”监控的“JYM-1”和“JYM-2”通讯协议,一套“科瑞信”监控 的 Modbus 通讯协议; 2.3 2.4 模块化设计,协议开放,支持扩展; 采用主、从控制,逐级启动的测量方式,可监测两段直流母线。
5 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1
8 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
艾默生PLC应用问题手册

EC系列小型可编程控制器应用问答集锦资料版本归档时间2007-05-18BOM编码艾默生网络能源有限公司为客户提供全方位的技术支持,用户可与就近的艾默生网络能源有限公司办事处或客户服务中心联系,也可直接与公司总部联系。
艾默生网络能源有限公司版权所有,保留一切权利。
内容如有改动,恕不另行通知。
艾默生网络能源有限公司地址:深圳市南山区科技工业园科发路一号邮编:518057公司网址:技术服务热线:800-8206510手机及未开通800地区:客户服务投诉热线:0E-mail前言目标读者本书适用于自动化技术人员,帮助他们解决在使用艾默生可编程控制器(以下简称PLC)中出现的问题,为广大艾默生PLC用户编程、系统设计和系统调试提供参考。
手册内容该手册通过问答的形式帮助用户解决在使用艾默生PLC时可能出现的产品应用问题、与周边设备连接问题、行业应用问题等。
回答中涉及的例子程序,发布在艾默生网络能源有限公司主页上。
阅读本手册的同时也可以参考阅读以下手册:■《EC系列小型可编程控制器编程手册》■《EC10 系列可编程控制器用户手册》■《EC20 系列可编程控制器用户手册》■《ControStar 编程软件用户手册》目录第一章硬件相关问题 ..................................................................... 错误!未定义书签。
PLC输出点控制交流接触器,应注意些什么?............................................ 错误!未定义书签。
EC系列小型PLC的输出触点容量是多少? .............................................. 错误!未定义书签。
PLC出现误动作怎么办? ............................................................. 错误!未定义书签。
PSM-E10_E11 CDT91
7.4 遥信信息字格式
遥信信息字格式见图6。
b7
b0
功能码(F0H~FFH)
b7
…
b0
b15
…
b8
b7
…
b0
b15
…
b8
Bn Bn+1 Bn+2 Bn+3 Bn+4
MONI10U111XY100B
第 8 页 共 17 页
校验码
图6 说明: (1)每个遥信字含32个状态位; (2)各状态位定义参见附录D。
6.3 控制字
控制字共有B7~B126个字节,其组成如图2所示。
6.3.1 控制字节说明
E:扩展位 当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。 在本协议中,此位总是为0。 L:帧长定义位 当L=0时表示本帧信息字数n为0,即本帧没有信息字; 当L=1时表示本帧有信息字。 在本协议中,此位总是为1。
本协议用到的功能码分配见表2。
表2
功能码代号 字数
00H ~7FH 128
E8H
1
EEH~EFH 2
功能码分配表 用途 遥测
设定命令(下行) 对时
MONI10U111XY100B
第 7 页 共 17 页
F0H~FFH 16
遥信
7.3 遥测信息字格式
遥测信息字格式见图5。
b7
b0
功能码(00H~7FH)
MONI10U111XY100B
第 4 页 共 17 页
b7 控制字节 帧类别码 信息字数 源站址 目的站址 校验码
b0 B7字节 B8 B9 B10 B11 B12
图2 控制字组成
b7
e10用户手册(v111新)

E10剪折机床专用显示装置用户手册V1.11南京埃斯顿工业自动化有限公司/ESTUN Industrial Automation Co., Ltd南京江宁经济开发区将军南路155号邮编211100 电话:025-******** No.155,Jiang Jun Road South,Jiang Ning Development Zone,Nanjing P.R.C 211100目录第1章简介 (3)第2章规格说明 (3)2.1显示 (3)2.2轴的编程特征 (4)2.3 E10 电气规格 (4)2.4环境温度 (4)第3章 E10安装、接线及调试 (4)3.1安装与配线注意事项 (5)3.2安装方向与空间 (5)3.3安装环境 (5)3.4外型尺寸 (5)3.5后面板 (6)3.5.1后面板 (6)3.5.2电源端 (6)3.5.3输入输出信号端 (6)3.5.4输入指示 (7)3.5.5输出指示 (7)3.5.6 编码器接口 (7)3.6系统调试步骤 (7)3.6.1调试前准备 (7)3.6.2调试 (8)3.6.3实际加工 (8)3.7 E10电气设计典型应用举例 (9)第4章操作说明 (10)4.1操作面板 (10)4.2操作面板一般介绍 (10)4.2.1指示灯 (10)4.2.2按键 (10)4.2.3数码管显示行 (11)4.3操作界面 (11)第5章示教参数 (13)5.1设置示教参数 (13)5.2示教参数 (14)第6章机床参数 (15)6.1设置机床参数 (15)6.2参数说明 (16)附录1 问题解答 (26)附录2 安装方式一:带塑料壳体安装 (26)附录3 安装方式二:面板安装 (28)第1章简介感谢您购买E10显示装置,为了您的正确使用和安全,请先仔细阅读本手册。
本手册并未完全涵盖操作过程中可能发生的所有故障,请勿试图尝试本手册未描述的操作。
数显折弯机或数显剪板机的运行受制于机械设备及E10显示装置间的结合。
艾默生PLC在变频器网络操纵中的通信程序设计

艾默生 PLC在变频器网络操纵中的通信程序设计2020-9-16 7:45:00 来源:中国自动化网阅读:256 网友评论条随着PLC技术的不断进展,愈来愈显示其壮大的核心操纵功能,PLC和其他设备之间的连接已经从比较烦琐的传统I/O方式向愈来愈受欢迎的简练先进的通信方式过渡,不仅为设计者节省了大量的硬件本钱,更能为远程操纵,组网提供了可能,使操纵系统加倍无缝地融为一体。
本文要紧通过艾默生PLC和多台变频器组网通信(以MODBUS协议方式)为例,说明PLC和多台变频器网络操纵的通信程序的设计方式。
一、 MODBUS协议简要介绍Modbus协议由美国闻名的MODICON公司提出,通过此协议,操纵器彼此之间、操纵器经由网络(例如以太网)和其它设备之间能够通信,不同厂商生产的操纵设备能够连成工业网络,进行集中监控,它已经成为一通用工业标准。
操纵器通信利用主—从技术,即仅一设备(主设备)能初始化传输(查询)。
其它设备(从设备)依照主设备查询提供的数据作出相应反映。
典型的主设备:IPC,HMI,PLC等;典型的从设备:各类仪表,PLC,变频器等。
主设备可单独和从设备通信,也能以广播方式和所有从设备通信。
若是单独通信,从设备返回一消息作为回应,若是是以广播方式查询的,那么不作任何回应。
Modbus 协议成立了主设备查询和从设备回应的格式:设备(或广播)地址、功能代码、所有要发送的数据、错误检测域。
Modbus协议同时支持RTU模式和ASCII模式,RTU模式对应的帧格式如下:(ASCII模式介绍省略)更详细的说明请查阅MODBUS协议的有关资料(或登岸网站)。
二、艾默生PLC集成的MODBUS协议功能艾默生EC20系列PLC的通信口COM 1集成了MODBUS主站协议,在编程时先在编程软件的系统块里进行设置具体如下:系统块—>“通信口”菜单—>“通信口1参数设置”菜单—> 选“MODBUS 协议”—> 进行“MODBUS设置”—> 进行通信参数和(主模式)站号等设置即可。
爱默生PLC使用手册
高温、结露、风雨的场合;有振动、冲击的场合。电击、火灾、使金属屑和电线头掉入控制器的通风孔内,这有可能引起火灾、故障、误
位置上限、下限的互锁开关; z 为使设备能安全运行,对重大事故相关的输出信号,请设计外部保护电路和安全机构; z 可编程控制器 CPU 检测到系统异常后可能会导致所有输出关闭;当控制器部分电路故障时,可能导致其输出
不受控制,为保证设备能正常运转,需设计合适的外部控制电路; z 可编程控制器的继电器、晶体管等输出单元损坏时,会使其输出无法控制为 ON 或 OFF 状态; z 可编程控制器设计应用于室内区域 B 和 C 注 1 的电气环境,其电源系统级应有防雷保护装置,确保雷击过电压
第二章 产品概述 ....................................................................................................................................................................... 2
3.5.1 主模块内置电源特性....................................................................................................................................................... 6 3.5.2 主模块可提供给扩展模块的电源规格 ........................................................................................................................... 7 3.5.3 扩展模块的电源消耗....................................................................................................................................................... 7 第四章 输入/输出特性 ............................................................................................................................................................... 9
艾默生通讯规约

ENPC 充电模块混合协议通讯规约拟制:张志国审核:标准化:批准:Modbus通讯规约1、概述本文描述了电力电源10A模块数据上报的Modbus通讯规约标准,应用于10A模块向上级监控设备上报数据时的通讯规约。
2、适用范围规约适用于艾默生网络能源有限公司开发的10A模块,是开发、测试10A模块通讯软件的依据。
3、参考文献Modicon Modbus Protocol Reference Guide PI-MBUS-300 Rev.J4、物理接口RS485,波特率9600,字符格式采用奇校验位、8位数据位、1位停止位(N81)的异步串行通讯格式。
5、帧结构采用有效的数据范围为0~9,A~F。
地址指10A模块的地址,范围:0~32功能码10A模块只支持功能码03(读数据)、06(设置数据)数据上报或下设的数据,按寄存器(数据地址)进行发送,每一个寄存器由两个字节组成,关于寄存器号的定义,请参阅附录A。
CRC校验码CRC(Cyclical Redundancy Check)对地址、功能码和数据进行校验,由两字节组成,CRC由传输设备生成,附加在数据帧中,如果由接收到数据计算出来的校验和与附加在数据后的校验和不一致,则有错误发生。
关于CRC生成函数,请参阅附录B内容。
6.命令解释6.1查询数据,功能码03上位机发送数据查询命令信息帧,10A模块接收到正确的查询命令后,对命令进行响应回送数据给上位机。
格式如下:10A6.2设置数据,功能码06上位机发送设置数据查询命令和设置数据,10A模块接收到正确的设置命令后,将指定的数据设置成命令帧中携带的数据,并将数据原样返回进行响应,若设置不成功时,不应答。
格式如下:10A关于广播命令:当上位机发送的设置命令数据包中地址字段为0xFF时,表示上位机发送广播命令,所有接收该类型数据包的模块都执行数据包中包含的命令,并且不对上位机应答。
注: 广播命令的定义不同于标准MODBUS协议的广播命令,在标准MODBUS命令中广播地址是0而不是0xFF。
艾默生PSM-E10通讯
EMERSON PSM-E10 MODBUS 规约1、概述本文描述了我司的PSM-E10监控单元MODBUS规约标准,PSM-E10监控单元通过MODBUS规约和综合自动化厂家的设备进行数据接口,向上级监控设备提供的通直流屏的各种运行参数,接收上级监控设备下发的命令,从而方便地实现四遥功能。
2、引用标准MODICON公司的MODBUS PROTOCOL标准。
3、物理接口通讯方式:串行RS232或RS485或RS422。
传输速率:600、1200、2400、4800、9600、19200、38400七种通讯波特率。
字符格式:8位数据位、1位停止位、无校验。
4、帧4.1帧结构帧结构如图所示,每帧内容包括:地址1BYTE,功能号1BYTE,数据nBYTE,校验2BYTE,PSM-E10采用MODBUS规约中的RTU方式,通讯帧以HEX码传送。
4.2 地址(ADDR)指监控单元PSM-E10的地址,范围为1-254可设。
4.3 功能号上级监控程序PSM-E10监控单元的命令代码。
4.4 数据下行命令帧是命令的附加信息,上行响应帧是具体的数据。
4.5 校验采用CRC校验,CRC生成函数,请参阅附录E内容。
5.命令解释各命令必须严格按下面给出的格式下发,PSM-E10则按响应格式响应,否则PSM-E10不响应。
--表示根据实际数值填写。
5.1 读遥信(DI)命令01H命令Slave Address -- Function Code 01H Start Point Hi 00H Start Point Lo 00H No.Point Hi 00H No.Point Lo 0FH CRC Hi -- CRC Lo --01H命令响应Slave Address -- Function Code 01H Byte Count 02H Data Lo -- Data Hi -- CRC Hi -- CRC Lo --可通过FC=01H 或FC=03H 命令读取DI ,PSM-E10共有DI 量15个点,必须一次全部读入。
程序员日志,以艾默生空调为例,讲解复杂ModBus协议实现……
程序员日志,以艾默生空调为例,讲解复杂ModBus协议实
现……
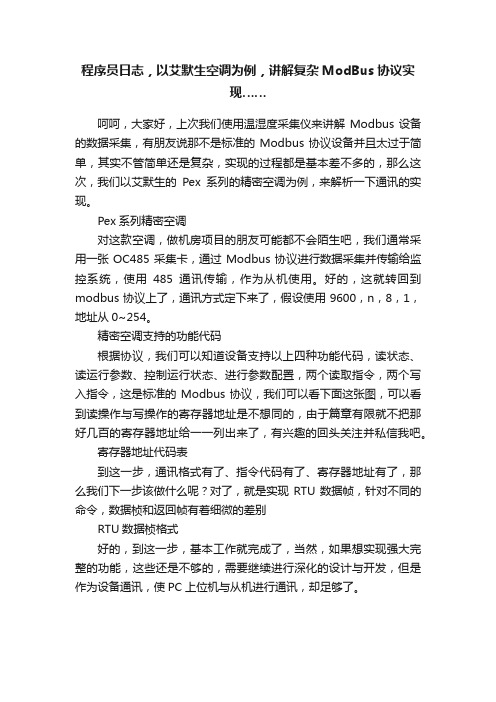
呵呵,大家好,上次我们使用温湿度采集仪来讲解Modbus设备的数据采集,有朋友说那不是标准的Modbus协议设备并且太过于简单,其实不管简单还是复杂,实现的过程都是基本差不多的,那么这次,我们以艾默生的Pex系列的精密空调为例,来解析一下通讯的实现。
Pex系列精密空调
对这款空调,做机房项目的朋友可能都不会陌生吧,我们通常采用一张OC485采集卡,通过Modbus协议进行数据采集并传输给监控系统,使用485通讯传输,作为从机使用。
好的,这就转回到modbus协议上了,通讯方式定下来了,假设使用9600,n,8,1,地址从0~254。
精密空调支持的功能代码
根据协议,我们可以知道设备支持以上四种功能代码,读状态、读运行参数、控制运行状态、进行参数配置,两个读取指令,两个写入指令,这是标准的Modbus协议,我们可以看下面这张图,可以看到读操作与写操作的寄存器地址是不想同的,由于篇章有限就不把那好几百的寄存器地址给一一列出来了,有兴趣的回头关注并私信我吧。
寄存器地址代码表
到这一步,通讯格式有了、指令代码有了、寄存器地址有了,那么我们下一步该做什么呢?对了,就是实现RTU数据帧,针对不同的命令,数据桢和返回帧有着细微的差别
RTU数据桢格式
好的,到这一步,基本工作就完成了,当然,如果想实现强大完整的功能,这些还是不够的,需要继续进行深化的设计与开发,但是作为设备通讯,使PC上位机与从机进行通讯,却足够了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EMERSON PSM-E10 MODBUS 规约1、概述本文描述了我司的PSM-E10监控单元MODBUS规约标准,PSM-E10监控单元通过MODBUS规约和综合自动化厂家的设备进行数据接口,向上级监控设备提供的通直流屏的各种运行参数,接收上级监控设备下发的命令,从而方便地实现四遥功能。
2、引用标准MODICON公司的MODBUS PROTOCOL标准。
3、物理接口通讯方式:串行RS232或RS485或RS422。
传输速率:600、1200、2400、4800、9600、19200、38400七种通讯波特率。
字符格式:8位数据位、1位停止位、无校验。
4、帧4.1帧结构帧结构如图所示,每帧内容包括:地址1BYTE,功能号1BYTE,数据nBYTE,校验2BYTE,PSM-E10采用MODBUS规约中的RTU方式,通讯帧以HEX码传送。
4.2 地址(ADDR)指监控单元PSM-E10的地址,范围为1-254可设。
4.3 功能号上级监控程序PSM-E10监控单元的命令代码。
4.4 数据下行命令帧是命令的附加信息,上行响应帧是具体的数据。
4.5 校验采用CRC校验,CRC生成函数,请参阅附录E内容。
5.命令解释各命令必须严格按下面给出的格式下发,PSM-E10则按响应格式响应,否则PSM-E10不响应。
--表示根据实际数值填写。
5.1 读遥信(DI)命令01H命令Slave Address -- Function Code 01H Start Point Hi 00H Start Point Lo 00H No.Point Hi 00H No.Point Lo 0FH CRC Hi -- CRC Lo --01H命令响应Slave Address -- Function Code 01H Byte Count 02H Data Lo -- Data Hi -- CRC Hi -- CRC Lo --可通过FC=01H 或FC=03H 命令读取DI ,PSM-E10共有DI 量15个点,必须一次全部读入。
各DI 的表示参见附录B 。
5.2读遥测(AI)命令通过FC=03H 命令读取AI ,PSM-E10共有AI 量9个点,必须一次全部读入。
各AI 的表示参见附录C 。
03H 命令Slave Address -- Function Code 03H Start Point Hi 00H Start Point Lo 00H No.Point Hi 00H No.Point Lo 01H CRC Hi -- CRC Lo --03H 命令响应Slave Address -- Function Code 03H Byte Count 12H Data0 Hi -- Data0 Lo -- : : Data8 Hi -- Data8 Lo -- CRC Hi -- CRC Lo --03H 命令Slave Address -- Function Code 03H Start Point Hi 00H Start Point Lo 64H No.Point Hi 00H No.Point Lo 09H CRC Hi -- CRC Lo --03H 命令响应Slave Address -- Function Code 03H Byte Count 12H Data Hi -- Data Lo -- CRC Hi -- CRC Lo --5.3遥控命令PSM-E10共有DO 量2个点,Data Hi = FFH 表示OFF ,Data Hi = 00H 表示ON 如果控制成功则将命令原样返回,如果控制不成功则不响应05H 命令Slave Address -- Function Code 05H Reg. Hi --H Reg. Lo --H Data Hi --H Data Lo 00H CRC Hi -- CRC Lo --05H 命令响应Slave Address -- Function Code 05H Reg. Hi --H Reg. Lo --H Data Hi --H Data Lo 00H CRC Hi -- CRC Lo --附录A:寄存器分配附录B:DI信号表寄存器1~99保留附录C:AI信号表每个AI量有两个字节构成,对应关系为0~65535 -500.0~+500.0,计算关系如下( W = 上送的16BIT值, V = 实际的AI值)V = (W/32767 – 1)*500.0附录D:DO信号表要控制电池均浮充转换,必须先将系统运行方式转换到手动运行。
在自动运行方式下,如果下发电池状态转换命令,PSM-E10不响应,无应答。
附录E:CRC校验的计算方法CRC(Cyclical Redundancy Check)由两字节组成,生成函数如下:1.CRC计算函数ChkSum(BYTE* pData,UINT nDataLen){BYTE uchCRCHi = 0xff;BYTE uchCRCLo = 0xff;UINT uIndex;while(nDataLen--){uIndex = uchCRCHi ^ *pData++;uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex];uchCRCLo = auchCRCLo[uIndex];}return (uchCRCHi<<8|uchCRCLo);}2。
CRC表高字节:BYTE auchCRCHi[] ={0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41, 0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x00,0xc1, 0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41, 0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40, 0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1, 0x81,0x40,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40, 0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40, 0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0, 0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40, 0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41, 0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41, 0x01,0xc0,0x80,0x41,0x00,0xc1,0x81,0x40,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40,0x00,0xc1,0x81,0x40, 0x01,0xc0,0x80,0x41,0x01,0xc0,0x80,0x41,0x00,0xc1, 0x81,0x40,0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41, 0x00,0xc1,0x81,0x40,0x01,0xc0,0x80,0x41,0x01,0xc0, 0x80,0x41,0x00,0xc1,0x81,0x40};低字节:BYTE auchCRCLo[] = {0x00,0xc0,0xc1,0x01,0xc3,0x03,0x02,0xc2,0xc6,0x06, 0x07,0xc7,0x05,0xc5,0xc4,0x04,0xcc,0x0c,0x0d,0xcd, 0x0f,0xcf,0xce,0x0e,0x0a,0xca,0xcb,0x0b,0xc9,0x09, 0x08,0xc8,0xd8,0x18,0x19,0xd9,0x1b,0xdb,0xda,0x1a, 0x1e,0xde,0xdf,0x1f,0xdd,0x1d,0x1c,0xdc,0x14,0xd4, 0xd5,0x15,0xd7,0x17,0x16,0xd6,0xd2,0x12,0x13,0xd3, 0x11,0xd1,0xd0,0x10,0xf0,0x30,0x31,0xf1,0x33,0xf3, 0xf2,0x32,0x36,0xf6,0xf7,0x37,0xf5,0x35,0x34,0xf4, 0x3c,0xfc,0xfd,0x3d,0xff,0x3f,0x3e,0xfe,0xfa,0x3a, 0x3b,0xfb,0x39,0xf9,0xf8,0x38,0x28,0xe8,0xe9,0x29, 0xeb,0x2b,0x2a,0xea,0xee,0x2e,0x2f,0xef,0x2d,0xed, 0xec,0x2c,0xe4,0x24,0x25,0xe5,0x27,0xe7,0xe6,0x26, 0x22,0xe2,0xe3,0x23,0xe1,0x21,0x20,0xe0,0xa0,0x60, 0x61,0xa1,0x63,0xa3,0xa2,0x62,0x66,0xa6,0xa7,0x67, 0xa5,0x65,0x64,0xa4,0x6c,0xac,0xad,0x6d,0xaf,0x6f, 0x6e,0xae,0xaa,0x6a,0x6b,0xab,0x69,0xa9,0xa8,0x68, 0x78,0xb8,0xb9,0x79,0xbb,0x7b,0x7a,0xba,0xbe,0x7e, 0x7f,0xbf,0x7d,0xbd,0xbc,0x7c,0xb4,0x74,0x75,0xb5, 0x77,0xb7,0xb6,0x76,0x72,0xb2,0xb3,0x73,0xb1,0x71,0x70,0xb0,0x50,0x90,0x91,0x51,0x93,0x53,0x52,0x92, 0x96,0x56,0x57,0x97,0x55,0x95,0x94,0x54,0x9c,0x5c, 0x5d,0x9d,0x5f,0x9f,0x9e,0x5e,0x5a,0x9a,0x9b,0x5b, 0x99,0x59,0x58,0x98,0x88,0x48,0x49,0x89,0x4b,0x8b, 0x8a,0x4a,0x4e,0x8e,0x8f,0x4f,0x8d,0x4d,0x4c,0x8c, 0x44,0x84,0x85,0x45,0x87,0x47,0x46,0x86,0x82,0x42, 0x43,0x83,0x41,0x81,0x80,0x40};。