三脚架的数学原理
三脚架的数学原理

三脚架的数学原理三脚架是一种用来支撑照相机或摄像机的器材。
它由三个相互连接的杆子组成,每个杆子的末端都安装有一个稳定器,通常是脚。
通过展开或折叠三脚架来调整稳定器的高度和角度,以便将相机或摄像机固定在所需的位置上。
三脚架的构成部分主要包括三个杆子、三个稳定器(脚)、中央柱、云台和固定装置。
杆子通常由金属或碳纤维制成,稳定器(脚)通常由橡胶或塑料制成,中央柱用于调整高度,云台用于调整水平角度和垂直角度,固定装置用于固定相机或摄像机。
操作三脚架的过程中,需要调整三个方面的参数:高度、角度和平衡。
高度通过调整中央柱的上下位置来实现,角度通过调整云台的角度来实现,平衡通过调整相机或摄像机的位置或球型云台来实现。
将相机或摄像机安装在三脚架上,可以使图像稳定、清晰,并且减少由手持摄影引起的抖动。
现在我们来讨论一下三脚架的数学原理。
首先,我们需要了解重心和力的概念。
重心是一个物体的质心或质量中心,它是一个物体的质量的平均位置。
三脚架上的相机或摄像机具有一个特定的重心,我们需要确保三脚架的稳定器上施加的力的合力通过重心。
假设相机或摄像机的重心位于杆子的中间位置,我们可以通过在三脚架上施加合力来实现稳定。
假设稳定器的力向下施加,并且它的大小相等,我们可以看到合力对重心产生的力矩为零。
这是因为合力通过重心,所以它不会产生任何转动。
然而,在实际情况下,我们不能保证稳定器的力完全相等,或者重心正好位于杆子的中间位置。
在这种情况下,合力产生了一个不为零的力矩,会使相机或摄像机倾斜或旋转。
为了解决这个问题,我们需要调整稳定器的位置或角度,以使合力通过重心。
通过将稳定器调整到恰当的位置,可以消除不稳定因素,使相机或摄像机保持平衡。
这就涉及到了杆子、稳定器和地面之间的几何关系。
三脚架通常采用一种三脚架四层六边形的形状,杆子的长度也是根据相关数学原理进行设计的。
通过调整稳定器的角度和高度,可以改变杆子和地面之间的角度,进而影响到合力对重心产生的力矩。
《神奇的小木棒》科学活动实录+反思

中班科学探究活动《神奇的小木棒》教学实录一、导入环节,让所有小木棒在桌子上稳稳站立师:今天老师带来了小木棒和橡皮筋,请小朋友们用橡皮筋帮助把所有的小木棒全都站到桌子上。
听清楚了吗?师:现在四个小朋友一组,分别站到小筐前自己进行操作。
幼儿纷纷站到小筐前,教师重复要求。
插入绑皮筋技能:握住小木棒的上端,把橡皮筋套在上面,交叉后再套一圈,反复此动作直至绑住小木棒。
个别指导:1、发现某幼儿只拿了其中几根小木棒,教师强调要求“所有的小木棒” 。
2、当有幼儿用橡皮筋绑好小木棒,鼓励幼儿“试一试你的所有小木棒可以站到桌子上吗?”3、幼儿大胆的向同组的幼儿展示绑橡皮筋的方法:套一下、套一下、再套一下就好了。
师:你的站起来了么?怎么又倒了?再试试有没有更好的方法。
4、当有幼儿将小木棒站到桌子上,请同组小朋友观察“小木棒是怎样站起来的” ,并请幼儿说一说自己用的什么好方法。
再请其他小朋友用他的好方法试一试,将所有小木棒站起来。
5、请反复试验成功的幼儿到其他组演示并介绍好方法,还没有将小木棒站到桌子上的幼儿仔细观察并尝试站立。
师:小朋友们把所有的小木棒都站到桌子上了吗?二、反复实验,操作出最少3 根小木棒就可以站到桌子上师:现在所有小木棒都站到桌子上的小朋友再试一试你抽掉几根小木棒还能不能站到桌子上?抽出的小木棒放到小筐里。
幼:抽掉两根可以么?师:又站起来的,小朋友就再抽掉一些。
个别指导师:你抽掉了几根?站起来了么?幼:4 根师:再抽掉一些试一试。
(二)师:你抽掉了几根?幼:3 根师:试一试再抽掉一些还能站起来么?幼:我觉得再抽掉一些就站不起来了。
师:动起小手再试一试(同组幼儿纷纷说,“我也再试一试”)当大部分幼儿用3 根、4 根、5 根小木棒站立起后,问“最少用几根小木棒就能站到桌子上?”重复要求“最少” !(三)师:这是最少的吗?还能再少一些吗?幼:3 根,我的再少就站不起来了。
(四)师:你用了几根?幼:2 根师:可以站起来吗?幼:好像不可以,我再加一根吧。
照相机的三脚架原理

照相机的三脚架原理
照相机的三脚架是一种用于固定相机的支架装置。
其原理是利用稳定的三脚支撑结构,提供相机固定的支撑平台,以减少相机在拍摄过程中因手持或者放置不稳造成的抖动,从而获得更稳定、清晰的照片。
三脚架的结构一般由三根脚杆和相机支架组成。
每根脚杆都分为多个可伸缩的节段,通过旋转锁定装置连接,从而可根据需求调整脚杆的长度。
三根脚杆通过交叉连接构成一个稳固的三角形支撑结构,稳定性很高。
脚杆的末端通常配备有一种叫做脚垫的装置,脚垫的设计使其能够提供更好的摩擦力,从而增加三脚架的稳定性。
一些脚垫还可以调整角度,以适应不同地形的使用需求。
相机支架位于三脚架的顶部,用于承载相机并将其固定在上面。
相机支架的设计通常具备可调节的角度,以实现不同拍摄角度的需要。
同时,相机支架通常配备一个快拆装置,方便用户快速固定或取下相机。
使用三脚架时,只需将其稳固地放置在地面或其他支撑物上,并调整脚杆和相机支架的角度,使相机正对拍摄对象。
然后将相机固定到相机支架上,通过相机的快门按钮进行拍摄。
通过使用三脚架,可以最大程度地减少摄影过程中的抖动和晃动,提高图片的清晰度和稳定性。
此外,三脚架还可提供更多
的拍摄自由度,使得拍摄者能够更好地选择不同的拍摄角度和构图。
三脚架的数学原理
三脚架的数学原理三脚架是主要由三条杆材连接而成的支撑结构。
作为承重工具,更重要的是作为在空间中固定物体位置的固定工具,三脚架在生产和生活的各个领域都有广泛的应用。
关于三脚架的数学原理,我看到已有两种解释。
一种解释说其原理是利用三角形的稳定性,使架于其上的物品获得一个稳定的支撑,而不易翻倒。
另一种解释说其原理是利用经过不在同一条直线上的三个点,有且只有一个平面。
也称为不在同一条直线上的三个点确定一个平面。
此说法我设想其典型化的解释:把3个球放在地面上,使它们不在同一条直线上(3个球视为不在同一条直线上的三个点),放一块平板(视为平面)在这3个球上(即经过这三个点有一个平面),这3个球能支撑住平板(即经过这三个点只有一个平面)——虽然如此,但并不唯一地确定被支撑物的位置。
以上两种解释分别用初中数学的平面几何中三角形的稳定性,高中数学的立体几何中关于平面的公理解释三脚架的原理。
看似有理,其实是不相关的:三脚架的原理其实是用3条线段(即三脚)及3个点(即脚的着地点)确定一个点(被支撑物)的位置,而不是用3条线段的长度确定三角形的形状和大小(三角形的稳定性),也不是用3个点确定一个平面。
从数学的角度说,三脚架的原理(不妨称为三脚架定理)是:空间中,球心不在同一条直线上的两两相交的3个球面的公共点,在3个球面的球心所在平面的某一侧,有且只有一个。
现阐述如下:一、定义:(1)图形球面:空间中到定点O的距离等于定长r(r≥0)的点的集合,称为以点O为球心r为半径的球面,其中定点O称为该球面的球心,定长r称为该球面的半径。
球面也是空间中到定点的距离等于定长的所有点组成的图形,还能够看作半圆绕其两个端点确定的直线旋转一周形成的图形。
不妨用小写希腊字母α、β、γ…等来记球面。
半径r=0的球面其实是一个点,能够称为点球面,为了方便,以下提到的球面都是指r>0的球面。
⑵位置关系①点与球面:设点P到半径为r的球面α的球心O的距离为d。
4 高程测量
4.3.3 水准测量外业方法
从已知水准点开始,连续安置水 准仪测出各站两点之间的高差。 在进行连续水准测量时,若其中 任何一个后视或前视读数有错误, 都要影响高差的正确性。 对于每一测站而言,为了校核每 次水准尺读数有无差错,可采用 改变仪器高的方法或双面尺法进 行测站检核。
1)两次仪器高法 在每一测站测得高差后,改变仪器高度0.1m以上再测一次高差, 对于普通水准测量和图根水准测量,当两次测得高差的差值的绝 对值应小于6mm,取两次高差的平均值作为该站测得的高差值, 否则要检查原因,重新测。 2) 双面尺法 用双面尺法进行水准测量就是同时读取每一把水准尺的黑面和红 面分划读数,然后由前后视尺的黑面读数计算出一个高差,前后 视尺的红面读数计算出另一个高差,以这两个高差之差是否小于 某一限值来进行检核。 在每一测站上仪器高度不变,这样可加快观测的速度。立尺点和 水准仪的安置同两次仪器高法。 在每一测站上,仪器经过粗平后,其观测程序为: ①瞄准后视点水准尺黑面分划→精平→读数; ② 瞄准前视点水准尺黑面分划→精平→读数; ③ 瞄准前视点水准尺红面分划→精平→读数; ④ 瞄准后视点水准尺红面分划→精平→读数。
水准尺与尺垫
4.2.3水准仪的操作
水准仪的正确操作程序包括:安置仪器、粗略整平、 瞄准、精确整平和读数。
一、水准仪安置
打开三脚架,使高度适宜,目估架头大致水平,将三脚 架尖踩入土中,用中心螺旋固定水准仪于架头上。 二、粗略整平:用脚螺旋使圆水准器气泡居中。
三、瞄准水准尺
(1)目镜对光使十字丝成像清晰。 (2)松开制动螺旋瞄准水准尺,再制动。 (3)物镜对光,使水准尺影象清晰;转动微动螺旋使尺 子像靠近十字丝竖丝一侧,便于读数。 (4)消除视差。
水准器:利用液体受重力作用后使气泡居于最高处的 特性,用来指示视准轴是否水平或仪器竖轴是否竖直 的装置。分圆水准器和管水准器两种。 圆水准器安装在基座上,供粗略整平用,管水准器安 装在望远镜旁,用于精确整平视准轴。
暑期备课笔记-高一物理第14讲:物体受力平衡的应用(教师版)
第13讲物体受力平衡(教师版)处理平衡问题的几种方法常用数学方法一.菱形转化为直角三角形:如果两分力大小相等,则以这两分力为邻边所作的平行四边形是一个菱形.而菱形的两条对角线相互垂直,可将菱形分成四个相同的直角三角形,于是菱形转化成为直角三角形.二.相似三角形法:如果在对力利用平行四边形定则运算的过程中,力三角形与几何三角形相似,则可根据相似三角形对应边成比例等性质求解.三.正交分解法: 建立直角坐标系,将各力分解到x轴和y轴上,运用两坐标轴上的合力等于零的条件。
多用于三个以上共点力作用下的物体的平衡。
值得注意的是:对x、y轴的方向的选择,尽可能使落在坐标轴上的力多,被分解的力尽可能是已知力,不宜分解待求力。
常用物理方法一.隔离法:为了弄清系统(连接体)内某个物体的受力和运动情况,一般可采用隔离法.运用隔离法解题的基本步骤是:(1)明确研究对象或过程、状态;(2)将某个研究对象或某段运动过程、或某个状态从全过程中隔离出来;(3)画出某状态下的受力图或运动过程示意图;(4)选用适当的物理规律列方程求解.二.整体法:当只涉及研究系统而不涉及系统内部某些物体的力和运动时,一般可采用整体法.运用整体法解题的基本步骤是:(1)明确研究的系统或运动的全过程;(2)画出系统整体的受力图或运动全过程的示意图;(3)选用适当的物理规律列方程求解.应用物体受力平衡分析物体受力利用数学方法分析物体受力利用物理方法分析物体受力1.合成分解法【例1】如图所示,在倾角为θ的斜面上,放一质量为m的光滑小球,球被竖直的木板挡住,则球对挡板的压力和球对斜面的压力分别是多少?【解析】以小球为研究对象,将重力按效果进行分解,作出力分解图,如图1.球对斜面的压力等于F2= mg/cosθ。
球对挡板的压力等于F1=mgtanθ.【答案】mgtanθ,mg/cosθ2.三角形相似法【例2】如图4所示,在半径为R的光滑半球面正上方距球心h处悬挂一定滑轮,重为G的小球A用绕过滑轮的绳子被站在地面上的人拉住。
2023-2024学年广东省深圳市科学高中高二(上)期中数学试卷【答案版】
2023-2024学年广东省深圳市科学高中高二(上)期中数学试卷一、单选题:本大题共8个小题,每小题5分,共40分,在每小题给出的四个选项中,只有一项符合要求的.1.已知集合A ={x|x−1x+3<0},B ={x||x|<2},则A ∩B =( ) A .{x |﹣2<x <1}B .{x |﹣3<x <2}C .{x |﹣2<x ≤1}D .{x |﹣2≤x ≤1}2.已知直线l ,m 和平面α,β.若α⊥β,l ⊥α,则“l ⊥m ”是“m ⊥β”的( ) A .充分不必要条件 B .必要不充分条件 C .充要条件D .既不充分也不必要条件3.在△ABC 中,CM →=3MB →,AN →+CN →=0,则( )A .MN →=14AC →+34AB →B .MN →=23AB →+76AC →C .MN →=16AC →−23AB →D .MN →=14AC →−34AB →4.已知某圆锥的侧面展开图是一个半径为r 的半圆,且该圆锥的体积为3π,则r =( ) A .√2B .√3C .2√3D .35.已知sin(α−π4)=−35,且α为锐角,则cos2α=( ) A .−1225B .1225C .−2425D .24256.已知正四面体ABCD ,M 为AB 中点,则直线CM 与直线BD 所成角的余弦值为( ) A .23B .√36C .√2121D .4√21217.已知椭圆C :x 2a 2+y 2b2=1(a >b >0),O 为椭圆的对称中心,F 为椭圆的一个焦点,P 为椭圆上一点,PF⊥x 轴,PF 与椭圆的另一个交点为点Q ,△POQ 为等腰直角三角形,则椭圆的离心率为( ) A .√32B .√5−12C .√3+14D .358.已知正三棱锥A ﹣BCD 的外接球是球O ,正三棱锥底边BC =3,侧棱AB =2√3,点E 在线段BD 上,且BE =DE ,过点E 作球O 的截面,则所得截面圆面积的取值范围是( ) A .[9π4,3π]B .[2π,3π]C .[11π4,4π]D .[9π4,4π]二、多选题:本大题共4小题,每小题5分,共20分.在每小题给出的选项中,有多项符合题目要求全部选对的得5分,部分选对的得2分,有选错的得0分.9.已知空间中三点A (﹣1,2,1),B (1,3,1),C (﹣2,4,2),则( )A .向量AB →与向量AC →垂直B .平面ABC 的一个法向量为n →=(l ,2,﹣5)C .AC →与BC →的夹角余弦值为√6611D .|AB →|=210.已知f(x)=√3sinωx +cosωx(ω<0)的最小正周期为π,则( ) A .f(π4)=√3B .f (x )的图象关于直线x =−π6对称 C .f (x )在(0,π3)上单调递增D .f (x )在(0,2π)上有四个零点11.古希腊著名数学家阿波罗尼斯发现:平面内到两个定点A ,B 的距离之比为定值λ(λ≠1)的点的轨迹是圆,后来,人们将这个圆以他的名字命名,称为阿波罗尼斯圆.在平面直角坐标系xOy 中,A (﹣1,0),B (2,0),动点M 满足MB =2MA ,直线l :x ﹣my +1=0,则以下说法正确的是( ) A .动点M 的轨迹方程为(x +2)2+y 2=4 B .直线l 与动点M 的轨迹一定相交C .若直线l 与动点M 的轨迹交于P 、Q 两点,且PQ =2√3,则m =±1D .动点M 到直线l 距离的最大值为312.在正方体ABCD ﹣A 1B 1C 1D 1中,AB =2,G 为C 1D 1的中点,点P 在线段B 1C 上运动,点Q 在棱C 1C 上运动,M 为空间中任意一点,则下列结论正确的有( ) A .直线BD 1⊥平面A 1C 1D B .PQ +QG 的最小值为3√2C .异面直线AP 与A 1D 所成角的取值范围是[π3,π2]D .当MA +MB =4时,三棱锥A ﹣MBC 体积最大时其外接球的表面积为28π3.三、填空题:本大题共4小题,每小题5分,共20分.13.若复数3+i 是实系数一元二次方程x 2﹣ax +b =0的一个根,则b = .14.已知⊙M :(x ﹣1)2+(y ﹣1)2=4,直线l :2x +y +2=0,点P 为直线l 上的动点,过点P 作⊙M 的切线P A ,切点为A ,则切线段P A 长的最小值为 .15.我们知道,三脚架放在地面上不易晃动,其中蕴含的数学原理是“不共线三点确定一个平面”;另一方面,空间直角坐标系xOy 中,过点P (x 0,y 0,z 0)且一个法向量为n →=(a ,b ,c)的平面α的方程为a (x ﹣x 0)+b (y ﹣y 0)+c (z ﹣z 0)=0.根据上述知识解决问题:现有一三脚架(三条脚架可看作三条边,它们的交点为顶点)放于桌面,建立合适空间直角坐标系xOy ,根据三支点的坐标可求得桌面所在平面α的方程为x ﹣2y +z =0,若三脚架顶点Q 的坐标为(0,2,3),则点Q 到平面α的距离为 . 16.已知△ABC 中,角A ,B ,C 对应的边分别为a ,b ,c ,D 是AB 上的四等分点(靠近点A )且CD =1,(a ﹣b )sin A =(c +b )(sin C ﹣sin B ),则a +3b 的最大值是 . 四、解答题:本大题共6小题,共70分.17.(10分)已知函数f (x )=A sin (ωx +φ)(其中A >0,ω>0,|φ|<π2)的部分图像如图所示,将函数f (x )的图象向右平移π4个单位长度,得到函数g (x )的图象.(1)求f (x )与g (x )的解析式;(2)求方程g(x)=√2在区间(0,2π)内的所有实数解的和.18.(12分)在△ABC 中,内角A ,B ,C 的对边分别为a ,b ,c ,a ﹣c =(√3sin A ﹣cos A )b . (1)求角B 的大小;(2)D 为AC 边上一点,DB ⊥AB ,BC =4,BD =√3,求边AB 的长.19.(12分)已知△ABC 的顶点A (﹣1,﹣1),C (1,﹣1),线段AB 的垂直平分线的方程为x +y =0. (1)求直线BC 的方程;(2)若△ABC 的外接圆为圆M ,过点P(√2,2)作圆M 的切线,求切线方程. 20.(12分)三棱柱ABC ﹣A 1B 1C 1中,侧面BCC 1B 1是矩形,AC =AA 1,AC 1⊥A 1B . (1)求证:面ACC 1A 1⊥面ABC ;(2)若BC =1,AC =2,∠A 1AC =60°,在棱AC 上是否存在一点P ,使得二面角B ﹣A 1P ﹣C 的大小为45°?若存在求出,不存在,请说明理由.21.(12分)已知椭圆M 焦点在x 轴,离心率为2√23,且过点(3,0),直线l :x =ky +m (m ≠3)与椭圆M 交于A ,B 两点,且以AB 为直径的圆经过定点C (3,0). (1)求椭圆M 的标准方程; (2)求△ABC 面积的最大值.22.(12分)已知集合M 是满足下列性制的函数f (x )的全体,存在实数a 、k (k ≠0),对于定义域内的任意x 均有f (a +x )=kf (a ﹣x )成立,称数对(a ,k )为函数f (x )的“伴随数对”. (1)判断f (x )=x 2是否属于集合M ,并说明理由;(2)若函数f (x )=sin x ∈M ,求满足条件的函数f (x )的所有“伴随数对”;(3)若(1,1),(2,﹣1)都是函数f (x )的“伴随数对”,当1≤x <2时,f (x )=cos (π2x );当x =2时,f (x )=0,求当2014≤x ≤2016时,函数y =f (x )的解析式和零点.2023-2024学年广东省深圳市科学高中高二(上)期中数学试卷参考答案与试题解析一、单选题:本大题共8个小题,每小题5分,共40分,在每小题给出的四个选项中,只有一项符合要求的.1.已知集合A ={x|x−1x+3<0},B ={x||x|<2},则A ∩B =( ) A .{x |﹣2<x <1} B .{x |﹣3<x <2} C .{x |﹣2<x ≤1} D .{x |﹣2≤x ≤1}解:因为x−1x+3<0⇒(x −1)(x +3)<0⇒−3<x <1,所以A ={x |﹣3<x <1}.因为|x |<2⇒﹣2<x <2,所以B ={x |﹣2<x <2}. A ∩B ={x |﹣2<x <1}. 故选:A .2.已知直线l ,m 和平面α,β.若α⊥β,l ⊥α,则“l ⊥m ”是“m ⊥β”的( ) A .充分不必要条件 B .必要不充分条件 C .充要条件D .既不充分也不必要条件解:因为α⊥β,l ⊥α,若m ⊥β,则可得l ⊥m ,必要性成立;若l ⊥m ,则m ∥α或m ⊂α都有可能,但是m ⊥β不一定成立,充分性不成立. 所以“l ⊥m ”是“m ⊥β”的必要不充分条件. 故选:B .3.在△ABC 中,CM →=3MB →,AN →+CN →=0,则( )A .MN →=14AC →+34AB →B .MN →=23AB →+76AC →C .MN →=16AC →−23AB →D .MN →=14AC →−34AB →解:由CM →=3MB →,AN →+CN →=0,可得BM →=14BC →,AN →=12AC →,所以MN →=AN →−(AB →+BM →)=12AC →−AB →−14BC → =12AC →−AB →−14(AC →−AB →) =14AC →−34AB →.故选:D .4.已知某圆锥的侧面展开图是一个半径为r 的半圆,且该圆锥的体积为3π,则r =( ) A .√2B .√3C .2√3D .3解:令圆锥底面圆半径为r ′,则2πr ′=πr ,解得r ′=12r , 从而圆锥的高ℎ=√r 2−r′2=√32r , 因此圆锥的体积V =13πr′2ℎ=13π(12r)2⋅√32r =3π,解得r =2√3.故选:C .5.已知sin(α−π4)=−35,且α为锐角,则cos2α=( ) A .−1225B .1225C .−2425 D .2425解:由sin(α−π4)=−35,且α为锐角,所以α∈(0,π2), 可得α−π4∈(−π4,π4),所以cos(α−π4)=√1−sin 2(α−π4)=45; 因此cosα=cos[(α−π4)+π4]=cos(α−π4)cos π4−sin(α−π4)sin π4=7√210, cos2α=2cos 2α−1=2×(7√210)2−1=2425. 故选:D .6.已知正四面体ABCD ,M 为AB 中点,则直线CM 与直线BD 所成角的余弦值为( ) A .23B .√36C .√2121D .4√2121解:如图,设正四面体ABCD 的棱长为2,取AD 的中点F ,连接MF 、CF ,因为M 、F 分别为AB 、AD 的中点,则MF ∥BD 且MF =12BD =1,因此∠CMF 或其补角为直线CM 与直线BD 所成的角, 因为△ABC 为等边三角形,M 为AB 的中点, 则CM ⊥AB ,且CM =ACsin60°=√3,同理CF =√3,在等腰△CMF 中,cos ∠CMF =12MFMC =123=√36,所以直线CM 与直线BD 所成角的余弦值为√36. 故选:B .7.已知椭圆C :x 2a 2+y 2b2=1(a >b >0),O 为椭圆的对称中心,F 为椭圆的一个焦点,P 为椭圆上一点,PF⊥x 轴,PF 与椭圆的另一个交点为点Q ,△POQ 为等腰直角三角形,则椭圆的离心率为( ) A .√32B .√5−12C .√3+14D .35解:如图,不妨设F (c ,0),P (c ,y 0), 因为点P (c ,y 0)在椭圆上,所以c 2a 2+y 02b 2=1,解得y 0=±b 2a ,所以P(c ,b2a),又△POQ 为等腰直角三角形,所以|PF |=|OF |, 即b 2a=c ,即a 2﹣c 2=ac ,所以e 2+e ﹣1=0, 解得e =√5−12或e =−1−√52(舍). 故选:B .8.已知正三棱锥A ﹣BCD 的外接球是球O ,正三棱锥底边BC =3,侧棱AB =2√3,点E 在线段BD 上,且BE =DE ,过点E 作球O 的截面,则所得截面圆面积的取值范围是( ) A .[9π4,3π]B .[2π,3π]C .[11π4,4π]D .[9π4,4π]解:如图,设△BDC 的中心为O 1,球O 的半径为R ,连接O 1D ,OD ,O 1E ,OE ,则O 1D =3sin60°×23=√3,AO 1=√AD 2−DO 12=3,在Rt △OO 1D 中,R 2=3+(3﹣R )2,解得R =2,在△DEO 1中,O 1E =√3+94−2×√3×32×cos30°=√32,∴OE =√O 1E 2+OO 12=√34+1=√72, 过点E 作圆O 的截面,当截面与OE 垂直时, 截面的面积最小,此时截面圆的半径为: r =√22−(√72)2=32,最小面积为π×(32)2=9π4, 当截面过球心时,截面面积最大,最大面积为4π. ∴所得截面圆面积的取值范围是[9π4,4π].故选:D .二、多选题:本大题共4小题,每小题5分,共20分.在每小题给出的选项中,有多项符合题目要求全部选对的得5分,部分选对的得2分,有选错的得0分.9.已知空间中三点A (﹣1,2,1),B (1,3,1),C (﹣2,4,2),则( ) A .向量AB →与向量AC →垂直B .平面ABC 的一个法向量为n →=(l ,2,﹣5) C .AC →与BC →的夹角余弦值为√6611D .|AB →|=2解:三点A (﹣1,2,1),B (1,3,1),C (﹣2,4,2), A 中,AB →=(2,1,0),AC →=(﹣1,2,1),所以AB →•AC →=2×(﹣1)+1×2+0×1=0,所以AB →⊥AC →,所以A 正确;B 中,设平面ABC 的法向量为n →=(x ,y ,z ), 则{n →⋅AB →=0n →⋅AC →=0,即{2x +y =0−x +2y +z =0, 令x =1,则n →=(1,﹣2,5),所以B 不正确;C 中,BC →=(﹣3,1,1),AC →•BC →=−1×(﹣3)+2×1+1×1=6, |AC →|=√(−1)2+22+12=√6,|BC →|=√(−3)2+12+12=√11,所以cos <AC →,BC →>=AC →⋅BC→|AC →|⋅|BC →|=6√6⋅√11=√6611,所以C 正确; D 中,|AB →|=√22+12+02=√5≠2,所以D 不正确. 故选:AC .10.已知f(x)=√3sinωx +cosωx(ω<0)的最小正周期为π,则( ) A .f(π4)=√3B .f (x )的图象关于直线x =−π6对称 C .f (x )在(0,π3)上单调递增D .f (x )在(0,2π)上有四个零点解:函数f (x )=√3sin ωx +cos ωx =2sin (ωx +π6)(ω<0)的最小正周期为π, ∴T =2π−ω=π,即ω=﹣2, 则f (x )=2sin (﹣2x +π6)=﹣2sin (2x −π6), A ,∵f (π4)=﹣2sin (π2−π6)=﹣2sinπ3=−√3,∴A 错误,B ,当x =−π6时,则f (−π6)=﹣2sin (−π2)=2,∴直线x =−π6为对称轴,∴B 正确,C ,∵x ∈(0,π3),∴2x −π6∈(−π6,π2),∴f (x )=﹣2sin (2x −π6)在x ∈(0,π3)上单调递减,∴C 错误,D ,令2x −π6=k π,k ∈Z ,则x =π12+kπ2,k ∈Z ,当k =0,即x =π12时,符合题意,当k =1,即x =7π12时,符合题意, 当k =2,即x =13π12时,符合题意,当k =3,即x =19π12时,符合题意,∴D 正确, 故选:BD .11.古希腊著名数学家阿波罗尼斯发现:平面内到两个定点A,B的距离之比为定值λ(λ≠1)的点的轨迹是圆,后来,人们将这个圆以他的名字命名,称为阿波罗尼斯圆.在平面直角坐标系xOy中,A(﹣1,0),B(2,0),动点M满足MB=2MA,直线l:x﹣my+1=0,则以下说法正确的是()A.动点M的轨迹方程为(x+2)2+y2=4B.直线l与动点M的轨迹一定相交C.若直线l与动点M的轨迹交于P、Q两点,且PQ=2√3,则m=±1D.动点M到直线l距离的最大值为3解:设点M(x,y),因为动点M满足MB=2MA,且A(﹣1,0),B(2,0),所以√(x−2)2+y2=2√(x+1)2+y2,整理可得x2+y2+4x=0,即(x+2)2+y2=4,对于A,动点M的轨迹是以N(﹣2,0)为圆心,2为半径的圆,动点M的轨迹方程为(x+2)2+y2=4,故A正确;对于B,因为直线l:x﹣my+1=0过定点C(﹣1,0),而点C(﹣1,0)在圆(x+2)2+y2=4内,所以直线l与动点M的轨迹一定相交,故B正确;对于C,因为PQ=2√3,所以圆心到直线的距离d=√r2−(|PQ|2)2=1,所以d=|−2+1|√1+(−m)=1,解得m=0,故C错误;对于D,因为圆心N到直线l的距离为1,所以动点M到直线l距离的最大值为1+2=3,故D正确.故选:ABD.12.在正方体ABCD﹣A1B1C1D1中,AB=2,G为C1D1的中点,点P在线段B1C上运动,点Q在棱C1C 上运动,M为空间中任意一点,则下列结论正确的有()A.直线BD1⊥平面A1C1DB.PQ+QG的最小值为3√2C.异面直线AP与A1D所成角的取值范围是[π3,π2]D .当MA +MB =4时,三棱锥A ﹣MBC 体积最大时其外接球的表面积为28π3.解:对于A 选项,连接B 1D 1,则B 1D 1⊥A 1C 1,由题可知,BB 1⊥平面A 1B 1C 1D 1,且A 1C 1⊂平面A 1B 1C 1D 1,则B 1B ⊥A 1C 1, 又B 1D 1∩B 1B =B 1,∴A 1C 1⊥平面D 1B 1B ,BD 1⊂平面D 1B 1B ,则BD 1⊥A 1C 1, 同理可得BD 1⊥DC 1,∵DC 1∩A 1C 1=C 1,∴直线BD 1⊥平面A 1C 1D ,则选项A 正确;对于B 选项,如图展开平面C 1CDD 1,使平面B 1BCDD 1C 1共面,过G 作GP ⊥B 1C ,交B 1C 与点P ,交C 1C 与点Q ,则此时|PQ |+|QG |最小, 由题可知,B 1G =3,则GP =3√22, 即|PQ |+|QG |的最小值为3√22,则B 选项错误;对于C 选项,由题可知,A 1B 1∥C 1D 1∥CD ,A 1B 1=C 1D 1=CD , 所以四边形A 1B 1CD 为平行四边形,则A 1D ∥B 1C , 所以AP 与B 1C 所成角即为异面直线AP 与A 1D 所成角, 又点P 在线段B 1C 上运动,可知△AB 1C 是等边三角形,所以直线AP 与A 1D 所成角的取值范围是[π3,π2],则C 选项正确; 对于D 选项,∵|MA |+|MB |=4,∴当M 、A 、B 三点共面时, 点M 的轨迹是以A 、B 为焦点的椭圆,又因为|AB |=2,所以椭圆的长轴长为4,短轴长为2√3,故点M 的轨迹是以A ,B 为焦点的椭球表面, 设AB 的中点为E ,要使三棱锥A ﹣MBC 的体积最大,即M 到平面ABC 的距离最大, 所以当M ∈平面ABB 1A 1,当ME ⊥平面ABC ,且ME =√3时,三棱锥A ﹣MBC 的体积最大, 此时△MAB 为等边三角形,设其中心为O1,三棱锥A﹣MBC的外接球的球心为O,△ABC的外心F,连接OF,OA,OO1,则OF=O1E=√33,AF=√2,所以AO2=OF2+AF2=73,即三棱锥A﹣MBC体积最大时其外接球的表面积S=4π×OA2=28π3.故选:ACD.三、填空题:本大题共4小题,每小题5分,共20分.13.若复数3+i是实系数一元二次方程x2﹣ax+b=0的一个根,则b=10.解:复数3+i是实系数一元二次方程x2﹣ax+b=0的一个根,则3﹣i也是实系数一元二次方程x2﹣ax+b=0的一个根,故(3+i)(3﹣i)=b,即b=10.故答案为:10.14.已知⊙M:(x﹣1)2+(y﹣1)2=4,直线l:2x+y+2=0,点P为直线l上的动点,过点P作⊙M的切线P A,切点为A,则切线段P A长的最小值为1.解:⊙M:(x﹣1)2+(y﹣1)2=4的圆心坐标为M(1,1),半径为2,如图,|MA|=2,要使|P A|最小,则|PM|最小,为圆心M到直线l:2x+y+2=0的距离,即√22+12=√5.∴|P A|的最小值为√(√5)2−22=1.故答案为:1.15.我们知道,三脚架放在地面上不易晃动,其中蕴含的数学原理是“不共线三点确定一个平面”;另一方面,空间直角坐标系xOy 中,过点P (x 0,y 0,z 0)且一个法向量为n →=(a ,b ,c)的平面α的方程为a (x ﹣x 0)+b (y ﹣y 0)+c (z ﹣z 0)=0.根据上述知识解决问题:现有一三脚架(三条脚架可看作三条边,它们的交点为顶点)放于桌面,建立合适空间直角坐标系xOy ,根据三支点的坐标可求得桌面所在平面α的方程为x ﹣2y +z =0,若三脚架顶点Q 的坐标为(0,2,3),则点Q 到平面α的距离为 √66. 解:平面α的方程为x ﹣2y +z =0,取P (0,0,0), 则平面的法向量为n →=(1,−2,1),PQ →=(0,2,3), 则cos〈PQ →,n →〉=PQ →⋅n→|PQ →|⋅|n →|=−4+313×6=−√7878,故点Q 到平面α的距离为|PQ →||cos〈PQ →,n →〉|=√13×√7878=√66.故答案为:√66. 16.已知△ABC 中,角A ,B ,C 对应的边分别为a ,b ,c ,D 是AB 上的四等分点(靠近点A )且CD =1,(a ﹣b )sin A =(c +b )(sin C ﹣sin B ),则a +3b 的最大值是 8√33. 解:因为(a ﹣b )sin A =(c +b )(sin C ﹣sin B ), 由正弦定理得a (a ﹣b )=(c +b )(c ﹣b ), 则a 2﹣ab =c 2﹣b 2,即a 2+b 2﹣c 2=ab ,所以cos ∠ACB =a 2+b 2−c 22ab =12,又∠ACB ∈(0,π),则∠ACB =π3;设∠ACD =θ,则∠BCD =π3−θ,且0<θ<π3, 在△ACD 中,有ADsinθ=CD sinA,则AD •sin A =sin θ,在△BCD 中,有BDsin(π3−θ)=CD sinB,则BD ⋅sinB =sin(π3−θ),又BD =3AD =3c4,即c 4(sinA +3sinB)=sinθ+sin(π3−θ), 又由正弦定理知c =2Rsin ∠ACB =√3R (R 为△ABC 的外接圆半径), 所以√3R 4(sinA +3sinB)=sinθ+√32cos −12sinθ=12sinθ+√32cosθ=sin(θ+π3, 则√38(2RsinA +6RsinB)=sin(θ+π3),即a +3b =3+π3),又π3<θ+π3<2π3,故当θ+π3=π2,即θ=π6时, 可得(a +3b)max =83=83√3. 故答案为:8√33. 四、解答题:本大题共6小题,共70分.17.(10分)已知函数f (x )=A sin (ωx +φ)(其中A >0,ω>0,|φ|<π2)的部分图像如图所示,将函数f (x )的图象向右平移π4个单位长度,得到函数g (x )的图象.(1)求f (x )与g (x )的解析式;(2)求方程g(x)=√2在区间(0,2π)内的所有实数解的和.解:(1)根据函数f (x )=A sin (ωx +φ)(其中A >0,ω>0,|φ|<π2)的部分图象, 可得A =2,14×2πω=7π12−π3,所以ω=2,再根据五点法作图,可得2×π3+φ=π,求得φ=π3, 所以函数f (x )=2sin (2x +π3),将函数f (x )=2sin (2x +π3)的图象向右平移π4个单位长度,得到函数g (x )=2sin[2(x −π4)+π3]=2sin(2x −π6)的图象,综上可得,f (x )=2sin (2x +π3),g (x )=2sin (2x −π6); (2)若g (x )=2sin (2x −π6)=√2,可得sin (2x −π6)=√22, 因为0<x <2π, 所以−π6<2x −π6<23π6, 所以2x −π6=π4或2x −π6=3π4或2x −π6=9π4或2x −π6=11π4, 所以x =5π24或x =11π24或x =29π24或x =35π24, 可得方程在区间(0,2π)内的所有实数解为5π24,11π24,29π24,35π24,故所有解的和为5π24+11π24+29π24+35π24=103π.18.(12分)在△ABC 中,内角A ,B ,C 的对边分别为a ,b ,c ,a ﹣c =(√3sin A ﹣cos A )b . (1)求角B 的大小;(2)D 为AC 边上一点,DB ⊥AB ,BC =4,BD =√3,求边AB 的长. 解:(1)由已知结合正弦定理可得sinA −sinC =(√3sinA −cosA)sinB ,∴sinA −sin(A +B)=(√3sinA −cosA)sinB ,∴sinA −sinAcosB =√3sinAsinB , 又∵sin A >0,∴√3sinB +cosB =1,∴sin(B +π6)=12. 又∵B ∈(0,π),∴B +π6∈(π6,7π6),∴B +π6=5π6,∴B =2π3. (2)∵D 为AC 边上一点,∴S △ABC =S △ABD +S △BCD , ∴12AB •BC •sin ∠ABC =12AB •BD +12BD •BC •sin ∠DAC ,即12⋅AB ⋅4⋅√32=12⋅AB ⋅√3+12⋅√3⋅4⋅12,解得AB =2.19.(12分)已知△ABC 的顶点A (﹣1,﹣1),C (1,﹣1),线段AB 的垂直平分线的方程为x +y =0.(1)求直线BC的方程;(2)若△ABC的外接圆为圆M,过点P(√2,2)作圆M的切线,求切线方程.解:(1)因为线段AB的垂直平分线的方程为x+y=0,所以点A,B关于直线x+y=0对称.因为A(﹣1,﹣1),所以B(1,1).又C(1,﹣1),所以直线BC的方程为x=1.(2)因为CA⊥CB,A(﹣1,﹣1),B(1,1),所以△ABC外接圆的方程为(x+1)(x﹣1)+(y+1)(y﹣1)=0,即x2+y2=2.所以圆M的圆心为(0,0),半径为√2.当切线的斜率不存在时,x=√2满足题意.当切线的斜率存在时,设切线方程为y−2=k(x−√2),即kx−y+2−√2k=0.因为圆心M到切线的距离d=|2−√2k|√1+k =√2,解得k=√24,所以切线方程为y−2=√24(x−√2),即√2x−4y+6=0.综上所述,切线方程为x=√2或√2x−4y+6=0.20.(12分)三棱柱ABC﹣A1B1C1中,侧面BCC1B1是矩形,AC=AA1,AC1⊥A1B.(1)求证:面ACC1A1⊥面ABC;(2)若BC=1,AC=2,∠A1AC=60°,在棱AC上是否存在一点P,使得二面角B﹣A1P﹣C的大小为45°?若存在求出,不存在,请说明理由.(1)证明:∵AC=AA1,四边形ACC1A1是平行四边形,∴四边形ACC1A1是菱形,∴AC1⊥A1C,又AC1⊥A1B,A1C∩A1B=A1,∴AC1⊥平面A1BC,BC⊂平面A1BC,∴BC⊥AC1,∵侧面BCC 1B 1是矩形,∴BC ⊥CC 1, AC 1∩CC 1=C 1,∴BC ⊥平面ACC 1A 1,又BC ⊂⊥平面ABC , ∴平面ACC 1A 1⊥平面ABC .(2)解:由(1),以C 为坐标原点,CA ,CB 所在直线分别为x ,y 轴,平面ACC 1A 1上过点C 且垂直于AC 的直线为z 轴,建立如图所示空间直角坐标系. 平面ACC 1A 1上过点C 且垂直于AC 的直线为z 轴.B (0,1,0),A 1(1,0,√3),设P (t ,0,0), BP →=(t ,﹣1,0),BA 1→=(1,﹣1,√3),由BC ⊥平面ACC 1A 1,可取平面ACC 1A 1的法向量为m →=(0,1,0). 设A 1BP 的法向量为n →=(x ,y ,z ),则n →•BP →=n →•BA 1→=0, ∴tx ﹣y =0,x ﹣y +√3z =0, 取n →=(√3,√3t ,t ﹣1),∴cos <m →,n →>=m →⋅n →|m →|⋅|n →|=√3t √3+3t +(t−1)=√22,化为t 2+t ﹣2=0,t >0,解得t =1,即CP =1.∴在棱AC 上存在一点P ,使得二面角B ﹣A 1P ﹣C 的大小为45°,此时点P 为AC 的中点. 21.(12分)已知椭圆M 焦点在x 轴,离心率为2√23,且过点(3,0),直线l :x =ky +m (m ≠3)与椭圆M 交于A ,B 两点,且以AB 为直径的圆经过定点C (3,0). (1)求椭圆M 的标准方程; (2)求△ABC 面积的最大值. 解:(1)由题意,设椭圆方程为x 2a 2+y 2b 2=1(a >b >0),由于椭圆离心率为2√23且过点(3,0), 所以{c a =2√23a =3,解得a =3,c =2√2,b =√a 2−c 2=1,故椭圆M 的标准方程为:x 29+y 2=1.(2)联立{x =ky +mx 29+y 2=1,可得(k 2+9)x 2+2kmy +m 2﹣9=0,设A (x 1,y 1),B (x 2,y 2),则当Δ>0时, 有y 1+y 2=−2kmk 2+9,y 1y 2=m 2−9k 2+9,若以AB 为直径的圆经过定点C (3,0),所以CA →⋅CB →=0,由CA →=(x 1−3,y 1),CB →=(x 2−3,y 2),得(x 1﹣3)(x 2﹣3)+y 1y 2=0,将x 1=ky 1+m ,x 2=ky 2+m 代入可得(k 2+1)y 1y 2+k(m −3)(y 1+y 2)+(m −3)2=0, 代入韦达定理可得:(k 2+1)×m 2−9k 2+9+k(m −3)×(−2km k 2+9)+(m −3)2=0,化简可得:5m 2﹣27m +36=0,解得m =125或m =3(舍), 则直线l :x =ky +125,故直线过定点Q(125,0), 则S △ABC =12|QC ||y 1﹣y 2|=12×(3−125)y 12×|y 1﹣y 2| =310√(y 1+y 2)2−4y 1y 2=310√(−2k×125k 2+9)2−4((125)2−9k 2+9)=95√25(k 2+9)−14425(k 2+9)2, 设t =1k 2+9,0<t ≤19,则S △ABC =95√−14425t 2+t ,当t =25288∈(0,19]时,S △ABC 取得最大值为38.22.(12分)已知集合M 是满足下列性制的函数f (x )的全体,存在实数a 、k (k ≠0),对于定义域内的任意x 均有f (a +x )=kf (a ﹣x )成立,称数对(a ,k )为函数f (x )的“伴随数对”. (1)判断f (x )=x 2是否属于集合M ,并说明理由;(2)若函数f (x )=sin x ∈M ,求满足条件的函数f (x )的所有“伴随数对”;(3)若(1,1),(2,﹣1)都是函数f (x )的“伴随数对”,当1≤x <2时,f (x )=cos (π2x );当x =2时,f (x )=0,求当2014≤x ≤2016时,函数y =f (x )的解析式和零点. 解:(1)f (x )=x 2的定义域为R .假设存在实数a 、k (k ≠0),对于定义域内的任意x 均有f (a +x )=kf (a ﹣x )成立, 则(a +x )2=k (a ﹣x )2,化为:(k ﹣1)x 2﹣2a (k +1)x +a 2(k ﹣1)=0, 由于上式对于任意实数x 都成立,∴{k −1=02a(k +1)=0a 2(k −1)=0,解得k =1,a =0.∴(0,1)是函数f (x )的“伴随数对”,f (x )∈M . (2)∵函数f (x )=sin x ∈M ,∴sin (a +x )=k sin (a ﹣x ),∴(1+k )cos a sin x +(1﹣k )sin a cos x =0, ∴√k 2+2kcos2a +1sin (x +φ)=0, ∵∀x ∈R 都成立,∴k 2+2k cos2a +1=0, ∴cos2a =−12(k +1k ),|k +1k |≥2, ∴|cos2a |≥1,又|cos2a |≤1, 故|cos2a |=1.当k =1时,cos2a =﹣1,a =n π+π2,n ∈Z . 当k =﹣1时,cos2a =1,a =n π,n ∈Z .∴f (x )的“伴随数对”为(n π+π2,1),(n π,﹣1),n ∈Z . (3)∵(1,1),(2,﹣1)都是函数f (x )的“伴随数对”, ∴f (1+x )=f (1﹣x ),f (2+x )=﹣f (2﹣x ), ∴f (x +4)=f (x ),T =4.当0<x <1时,则1<2﹣x <2,此时f (x )=f (2﹣x )=﹣cos (π2x); 当2<x <3时,则1<4﹣x <2,此时f (x )=﹣f (4﹣x )=﹣cos (π2x); 当3<x <4时,则0<4﹣x <1,此时f (x )=﹣f (4﹣x )=cos (π2x).∴f (x )={−cos(π2x),0<x <1cos(π2x),1<x <2−cos(π2x),2<x <3cos(π2x),3<x <40,x =0,1,2,3,4.∴f (x )={−cos(π2x),2014<x <2015cos(π2x),2015<x <20160,x =2014,2015,2016.∴当2014≤x ≤2016时,函数y =f (x )的零点为2014,2015,2016.。
三脚架的数学原理
三脚架的数学原理四川省南部中学蒲筱平三脚架是主要由三条杆材连接而成的支撐结构。
作为承重工具,更重要的是作为在空间中固定物体位置的固定工具,三脚架在生产和生活的各个领域都有广泛的应用。
关于三脚架的数学原理,我看到已有两种解释。
一种解释说其原理是利用三角形的稳定性,使架于其上的物品获得一个稳定的支撑,而不易翻倒。
另一种解释说其原理是利用经过不在同一条直线上的三个点, 有且只有一个平而。
也称为不在同一条直线上的三个点确定一个平而。
此说法我设想其典型化的解释:把3个球放在地面上,使它们不在同一条直线上(3个球视为不在同一条直线上的三个点),放一块平板(视为平而)在这3个球上(即经过这三个点有一个平而),这3个球能支撑住平板(即经过这三个点只有一个平面)一一虽然如此,但并不唯一地确定被支撐物的位置。
以上两种解释分别用初中数学的平面几何中三角形的稳定性,高中数学的立体几何中关于平而的公理解释三脚架的原理。
看似有理,其实是不相关的:三脚架的原理其实是用3条线段(即三脚)及3个点(即脚的着地点)确定一个点(被支撐物)的位置,而不是用3条线段的长度确定三角形的形状和大小(三角形的稳定性),也不是用3个点确定一个平而。
从数学的角度说,三脚架的原理(不妨称为三脚架定理)是:空间中,球心不在同一条直线上的两两相交的3个球个球而④两个球面:设两球而a, a的半径分别为T, r,两球心的距2211离为d。
当d> r+r时,称球面a , a夕卜离;当d= r+r时,称球面a , 1122211a ?<d <r?时称-r=? r a相交?;当r-r;当0<d , +T时称球面a外切2122122H?时称球面a ?-r r<?, a内切;当0=d=?r-r重合;当d球面a , a 21212121时称球而a , a内含;当d=0时称球面a , a同心O 2121⑤圆与球面:,平面a与球面B的位置有且只有3种:设圆&所在的平面为a切点与圆&的位置有与球而0相切时,相离,相交,相切;平面a且只有3种:切点在圆外,切点在圆上,切点在圆内:平面a与球面B相交时,公共部分组成一个圆(不妨称为交圆),圆&与交圆的位置按照初中数学中的方法分外离,外切,相交(此时可称圆&与球面B相交),内切,内含(包括同心),重合(此时可称圆&在球面B上或称球面0经过圆&)等6种。
凳子为何都是四只脚1

圆凳子为何都是四只脚数学是历史最悠久的人类知识领域之一。
从远古的结绳记事到现代意义下的电子计算机的诞生;从量地测天到抽象严密的公理化体系,无不体现了数学这个最富有理性魅力的重要角色。
随着科学技术的发展,数学的应用范围日益广泛,不但在自然科学的各个分支中应用,而且在社会科学的很多分支中也有应用。
让我们在生活实践中认识数学,通过将生活实际问题抽象为数学问题,通过观察绘图计算给出答案。
同时也感受到生活中只要多观察、多思考就能发现许多问题是可以用数学的方法解决的,体会数学来源于生活!在学校每当轮到值日扫地或在家帮助父母做家务扫地时,都碰到同样一个问题,就是凳子的腿总是阻碍着我们扫地,扫到那都会碰到凳子的腿,相信每位同学都扫过地吧,不知同学们有没有想过,凳子为什么做四只腿,在学了三角形的稳定性,三点能确定一个平面后,便想到给凳子的四条腿提出了几个问题?省去一条腿行不行?下面就来讨论为什么大多数的圆凳子都是四条腿?三条腿与四条腿有何区别?一、探讨问题1:为何大多数的圆凳子、圆桌子都是四只脚?1、四条腿的凳子比三条腿的凳子稳固四条腿的凳子比三条腿的凳子稳固。
稳固就是人坐上去使凳子受力不均的时候人不容易翻倒。
从如下几个方面来说明。
(1)四条腿凳子的临界倾倒角大于三条腿凳子的临界倾倒角四条腿凳子的临界倾倒角大于三条腿凳子的临界倾倒角,所以四条腿的凳子比三条腿的凳子稳固。
首先分析圆柱体是外力的作用下,圆柱翻倒与什么有关?由力学原理得知,当物体的重心离开垂直线时,物体就会翻倒,如下图,重心O与地面的接触点B点的连线垂直水平线时,物体处相对稳定,当重心向上移动,重心在垂线外,物体就翻倒,重心向下移,物体就会复原到正常状态。
这说明物体的稳定性与下图中的∠AOB有关,∠AOB 越大越稳定,∠AOB角的大小与圆柱的高度和半径有关,相同的高度半径越大越稳定。
四条腿凳子与三条腿凳子的临界倾倒角证明如下:设:三只脚的凳子和四只脚的凳子的高度相同,均为h ,平面的半径都为R ,且腿与凳子的平面垂直成90°角,人坐上去的重心高度均为g+h,则(I )当凳子为三只脚时,OD=R ·sin30°=R/2=OB (如下图1)GB=g+h, 又∵△OBA ∽△BGO∴∠a =∠β∴tan a1 = OB:GB=R:2(h+g)(设凳子三只脚的临界倾倒角为a) (II )凳子四条腿时,OD= 2 R/2(如下图1所示)同理可得:tan a2= OB:GB=R/[ 2 (h+g ) ]>R/2(h+g )>tan a1∴a2>a 1即四条腿临界倾倒角大于三条腿临界倾倒角故:相同高度的四条腿凳子比三条腿凳子更稳定。
全站仪教程

全站仪教程一、全站仪的用途:全站仪是指测量大地方位角,目标距离或坐标,实地放样及几何图形面积,并能自动计算的测量仪器,与水准仪、经纬仪相比,全站仪兼容了水准仪(高程测量)与经纬仪(角度测量)以及钢尺(距离测量)等测量工具的性能。
OTS632A型全站仪可测量角度、距离、悬高、偏心、点到直线、面积等一系列测量功能,目前建筑工程常用到的有:①坐标控制网建立(坐标测设);②实地放样(建筑红线或建筑物定位);③面积测量。
二、简介全站仪架设及对准调平(经纬仪类同)1、架设三脚架将三脚架升到适当高度,使三条腿等长,打开并使三脚架顶面近视水平,且位于测站点的正上方,将三脚架腿支撑地面上使其中的一条腿固定,用脚踩实支架腿踏板,使三脚架支腿固定于地面。
2、安置仪器和对点将仪器安置到三脚架上,拧紧中心连接螺旋,调整光学对电器,使十字丝成像清晰,双手握住另外两条未固定架腿,通过对光学对点器的观察调节该两条支架腿的位置。
当光学对点器大致对准测站时(测站点进入光学对点器内圈),使三脚架三条腿均固定在地面上,调节全站仪的三个脚螺旋使光学对点器精确对准测站点。
3、利用圆水准泡粗平仪器调整三脚架三条腿的长度,使全站仪圆水准气泡居中。
4、利用管水准泡精平仪器(气泡移动方向与左手大拇指移动方向一致)。
松开水平制动螺旋,转动仪器使管水准器平行于某一对脚螺旋A、B 的连线,通过旋转脚螺旋A、B,使管水准器气泡居中(管水准器两侧两条刻线水泡不超过第二条刻线即可)。
将仪器旋转90°,使其垂直于脚螺旋A、B的连线,再旋转第三个脚螺旋C,使管水准器气泡居中(同上)。
5、精确对中与整平通过对光学对点器的观察,轻微松开中心连接螺旋平移仪器(不可旋转仪器),使仪器精确的对准测站点,再拧紧中心连接螺旋(重复第4、5条直到仪器精平为止)。
三、确定需测量内容及使用何种测量程序并选用选配的棱镜支架1、测站点到某目标点之间水平或斜距离测量(距离测量程序)由于地面凹凸不平或中间有坑地、障碍物或地貌为坡地,无法用于钢尺测量其水平距离,有时因测站点与目标点距离较远,无法用于钢尺一整尺测出距离,若采用多次量距然后累计相加,可能所量距离不是直线而是折线,从而引起测量不准确。
三脚架的数学原理
三脚架的数学原理四川省南部中学蒲筱平三脚架是主要由三条杆材连接而成的支撑结构。
作为承重工具,更重要的是作为在空间中固定物体位置的固定工具,三脚架在生产和生活的各个领域都有广泛的应用。
关于三脚架的数学原理,我看到已有两种解释。
一种解释说其原理是利用三角形的稳定性,使架于其上的物品获得一个稳定的支撑,而不易翻倒。
另一种解释说其原理是利用经过不在同一条直线上的三个点,有且只有一个平面。
也称为不在同一条直线上的三个点确定一个平面。
此说法我设想其典型化的解释:把3个球放在地面上,使它们不在同一条直线上(3个球视为不在同一条直线上的三个点),放一块平板(视为平面)在这3个球上(即经过这三个点有一个平面),这3个球能支撑住平板(即经过这三个点只有一个平面)——虽然如此,但并不唯一地确定被支撑物的位置。
以上两种解释分别用初中数学的平面几何中三角形的稳定性,高中数学的立体几何中关于平面的公理解释三脚架的原理。
看似有理,其实是不相关的:三脚架的原理其实是用3条线段(即三脚)及3个点(即脚的着地点)确定一个点(被支撑物)的位置,而不是用3条线段的长度确定三角形的形状和大小(三角形的稳定性),也不是用3个点确定一个平面。
从数学的角度说,三脚架的原理(不妨称为三脚架定理)是:空间中,球心不在同一条直线上的两两相交的3个球面的公共点,在3个球面的球心所在平面的某一侧,有且只有一个。
现阐述如下:一、定义:(1)图形球面:空间中到定点O的距离等于定长r(r≥0)的点的集合,称为以点O为球心r为半径的球面,其中定点O称为该球面的球心,定长r称为该球面的半径。
球面也是空间中到定点的距离等于定长的所有点组成的图形,还可以看作半圆绕其两个端点确定的直线旋转一周形成的图形。
不妨用小写希腊字母α、β、γ…等来记球面。
半径r=0的球面其实是一个点,可以称为点球面,为了方便,以下提到的球面都是指r>0的球面。
⑵位置关系①点与球面:设点P到半径为r的球面α的球心O的距离为d。
大班优秀科学教案《神奇的三脚架》含反思

大班优秀科学教案《神奇的三脚架》含反思一、教学内容本节课选自大班优秀科学教材第四章《力的探索》中的第三节《神奇的三脚架》。
详细内容包括:三脚架的结构与稳定性,三脚架在日常生活和科学实验中的应用,通过实践活动探究三脚架的稳定性与力的大小关系。
二、教学目标1. 知道三脚架的结构特点,理解三脚架的稳定性原理。
2. 能够运用三脚架进行简单的科学实验,培养动手操作能力和观察能力。
3. 通过对三脚架稳定性的探究,激发对科学现象的兴趣和好奇心。
三、教学难点与重点教学难点:三脚架稳定性的原理及其在实验中的应用。
教学重点:掌握三脚架的结构特点,能够运用三脚架进行科学实验。
四、教具与学具准备1. 教具:三脚架模型、实验器材(如:小石块、尺子、绳子等)。
2. 学具:每组一个三脚架、实验器材(如:小石块、尺子、绳子等)。
五、教学过程1. 实践情景引入组织学生观察生活中的三脚架,如:照相机三脚架、野外露营用三脚架等,让学生了解三脚架在生活中的广泛应用。
2. 新课导入通过展示三脚架模型,引导学生观察三脚架的结构特点,讨论三脚架的稳定性原理。
3. 例题讲解举例说明三脚架在科学实验中的应用,如:利用三脚架进行力的测量实验。
4. 随堂练习学生分组进行实验,观察三脚架稳定性与力的大小关系。
六、板书设计1. 《神奇的三脚架》2. 内容:三脚架的结构特点三脚架的稳定性原理三脚架在科学实验中的应用七、作业设计1. 作业题目:设计一个利用三脚架的实验,探究力的作用效果。
答案:学生可设计实验,如:利用三脚架悬挂小石块,观察不同力的大小对小石块摆动幅度的影响。
2. 作业要求:实验报告包括实验目的、实验器材、实验步骤、实验结果及结论。
八、课后反思及拓展延伸本节课通过实践情景引入、例题讲解、随堂练习等方式,让学生掌握了三脚架的结构特点、稳定性原理以及在科学实验中的应用。
课后反思如下:1. 学生在实验过程中,对三脚架稳定性的探究较为积极,但对力的大小与稳定性关系的理解仍需加强。
江苏省常州联盟校2023-2024学年高二下学期4月期中调研数学试题含答案

常州市联盟学校2023-2024学年度第二学期期中调研高二年级数学试卷2024.4考试时间120分钟满分150分一、选择题:本题共8小题,每小题5分,共40分.在每小题给出的四个选项中,只有一项是符合题目要求的.1.向量()()2,1,1,1,1,a b x =-=,若a b ⊥ ,则x =()A .2-B .1-C .1D .02.若某质点的运动方程是2()(21)S t t =-,(位移单位:m ,时间单位:s ),则该质点在1s t =时的瞬时速度为()A .1m /sB .2m /sC .3m /sD .4m /s3.对A ,B 两地国企员工上班迟到情况进行统计,可知两地国企员工的上班迟到时间均符合正态分布,其中A 地员工的上班迟到时间为X (单位:min ),()2,4X N :,对应的曲线为1C ,B 地员工的上班迟到时间为Y (单位:min ),9,13Y N ⎛⎫ ⎪⎝⎭,对应的曲线为2C ,则下列图象正确的是()4.设随机变量X 的分布列为()12iP X i a ⎛⎫== ⎪⎝⎭,1,2,3i =,则则X 的数学期望E (X )=()A .117B .7764C .716D .2275.已知函数()f x 与其导函数()f x ¢的图像如图,则函数()()ex f x g x =的单调减区间为()A .()0,4B .40,3⎛⎫ ⎪⎝⎭C .()()0,1,4,+∞D .()4,1,,3⎛⎫-∞+∞ ⎪⎝⎭6.函数()3223f x x ax bx a =+++在=1x -时有极值0,则a b +=()A .4B .6C .11D .4或11A BC D第5题图7.如图,在正三棱柱111ABC A B C -中,11AB AA ==,P 为11B C 的中点,则1AC BP ⋅=()A .54B .1C .32D .128.已知函数()321132f x ax bx cx d =+++存在两个极值点()1212,x x x x <,且()11f x x =-,()22f x x =.设()f x 的零点个数为m ,方程()()2a f x bf x c ⎡⎤++=⎣⎦的实根个数为n ,则m n +的取值不可能为()A .4B .5C .6D .7二、多选题:本题共3小题,每小题6分,共18分.在每小题给出的选项中,有多项符合题目要求.全部选对的得6分,部分选对的得部分分,有选错的得0分.10.下列说法正确的是()A .若随机变量X ~110,2B ⎛⎫ ⎪⎝⎭,则()5E X =B .若随机变量X 的方差()1D X =,则()3110D X +=C .若()0.6P A =,()0.4P B =,()0.4P B A =,则事件A 与事件B 独立D .若随机变量X 服从正态分布()26,N σ,若()100.8P X <=,则()260.3P X <<=11.已知函数()()e 211x x f x x -=-,下列说法中正确的有()A .函数()f x 的单调递减区间为30,2⎛⎫ ⎪⎝⎭B .曲线()y f x =在0x=处的切线方程为1y =C .函数()f x 既有极大值又有极小值,且极大值小于极小值D .方程()f x k =有两个不等实根,则实数k 的取值范围为()32,14,e ⎛⎫-∞+∞ ⎪⎝⎭三、填空题:本题共3小题,每小题5分,共15分.P第7题图12.我们知道,三脚架放在地面上不易晃动,其中蕴含的数学原理是“不共线三点确定一个平面”;另一方面,空间直角坐标系xOy 中,过点()000,,P x y z 且一个法向量为(),,n a b c =的平面α的方程为()()()0000a x x b y y c z z -+-+-=.根据上述知识解决问题:现有一三脚架(三条脚架可看为三条边,它们的交点为顶点)放于桌面,建立合适空间直角坐标系xOy ,根据三支点的坐标可求得桌面所在平面α的方程为20x y z -+=,若三脚架顶点P 的坐标为()0,3,4,则点P 到平面α的距离为.13.兵乓球(table tennis ),被称为中国的“国球”,是一种世界流行的球类体育项目.已知某次乒乓球比赛单局赛制为:两球换发制,每人发两个球,然后由对方发球,先得11分者获胜,若单局比赛中,甲发球时获胜的概率为23,甲接球时获胜的概率为12,甲先发球,则单局比赛中甲11:1获胜的概率为.14.存在过点(),0P t 的直线与曲线()ln xy x e x=>相切,则实数t 的取值范围是___________.四、解答题:本题共5小题,共77分.解答应写出文字说明、证明过程或演算步骤.15.(13分)如图,在四棱柱ABCD-A 1B 1C 1D 1中,侧棱A 1A ⊥平面ABCD ,AB ∥DC ,AB ⊥AD ,AD=CD=1,AA 1=AB=2,E 为棱AA 1的中点,M 为棱CE 的中点.(1)证明:BC ⊥C 1E(2)求异面直线BM 与AD 所成角的余弦值第15题图17.(15分)如图,在四棱锥P ABCD -中,四边形ABCD 为正方形,平面PCD ⊥平面ABCD ,PCD ∆是边长为2等边三角形,点E N 、分别为CD BC 、的中点,点M 为线段PE 上一点(包括端点).(1)若M 为线段PE 的中点,求平面BDM 和平面ABD 夹角的正弦值;(2)当直线MN 与平面BDM 所成的角最大时,求出MEPE的值.18.(17分)已知函数()21ln 2f x x x ax a R =-∈,.(1)若()()f x g x x=,求函数()g x 在区间[]1,e 上的最大值;(2)若对于任意的12(0,)x x ∈+∞,,12x x ≠,都有1212()()1f x f x x x -<-,则实数a 的取值范围.19.(17分)有甲乙两个骰子,甲骰子正常且均匀,乙骰子不正常且不均匀,经测试,投掷乙骰子得到6点朝上的概率为p ,若投掷乙骰子共6次,设恰有3次得到6点朝上的概率为()f p ,0p 是()f p 的极大值点.(1)求0p ;(2)若0p p =且等可能地选择甲乙其中的一个骰子,连续投掷3次,在得到都是6点朝上的结果的前提下,求这个骰子是乙骰子的概率;(3)若0p p =且每次都等可能地选择其中一个骰子,共投掷了10次,在得到都是6点朝上的结果的前提下,设这10次中有X 次用了乙骰子的概率为()P X ,试问当X 取何值时()P X 最大?并求()P X 的最大值(精确到0.01).(参考数据0563.075.010≈)PABC DEMN第17题图常州市联盟学校2023-2024学年度第二学期期中调研高二年级数学答案2024.4一、选择题:本题共8小题,每小题5分,共40分.在每小题给出的四个选项中,只有一项是符合题目要求的.1.B 2.D 3.B 4.A 5.C 6.C 7.A 8.D二、多选题:本题共3小题,每小题6分,共18分.在每小题给出的选项中,有多项符合题目要求.全部选对的得6分,部分选对的得3分,有选错的得0分.(如果选项有2个,则每个选项3分,即选对一个得3分,全部选对得6分;如果选项有3个,则每个选项2分,即选对一个得2分,选对两个得4分,全部选对得6分.)9.BD 10.ACD 11.BC三、填空题:本题共3小题,每小题5分,共15分.12.6313.872914.2(,e ⎤-∞-⎦四、解答题:本题共5小题,共77分.解答应写出文字说明、证明过程或演算步骤.15.(13分)(1)因为侧棱A 1A ⊥平面ABCD ,所以A 1A ⊥AB ,A 1A ⊥AD又因为AB ⊥AD ,所以以A 为坐标原点,AD ,AA 1,AB 所在直线分别为x 轴,y 轴,z 轴建立空间直角坐标系,如图所示:则(0,0,2)B ,(1,0,0D ),(1,0,1)C ,(0,1,0)E ,1(1,2,1)C ,1)0,(2,2B ,.……3分所以BC =(1,0,1)-,1EC =(1,1,1),所以BC ·1EC=1×1+0+1×(1)-=0,所以BC ⊥1EC,故BC ⊥C 1E.…….………7分(2)因为M 为棱CE 的中点111(,,)222M .…….………8分113(,,)222BM =- ,(1,0,0)AD = ,1112cos ,111114BM AD BM AD BM AD<>===.………12分所以异面直线BM 与AD 所成角的余弦值1111..…….………13分16.(15分)(1)由题意可知X 可能取值为30,80,130,则022224C C 1(30)C 6P X ===,112224C C 42(80)C 63P X ====,2224C 1(130)C 6P X ===,所以X 的分布列为所以121()308013080636E X =⨯+⨯+⨯=……….…….…….……7分(2)设顾客选方案B ,所获得的金额为Y ,则Y 的可能取值为30,60,120,则X3080130P1623160202111(30)C 224P Y ⎛⎫⎛⎫==⨯= ⎪ ⎪⎝⎭⎝⎭,1112111(60)C 222P Y ⎛⎫⎛⎫==⨯= ⎪ ⎪⎝⎭⎝⎭,2022111(120)C 224P Y ⎛⎫⎛⎫==⨯= ⎪ ⎪⎝⎭⎝⎭,所以Y 的分布列为111135()30601204242E Y =⨯+⨯+⨯=,……….…….…….……14分所以()()E X E Y >,所以选择方案A .……….…….…….……15分17.(15分)(1)PCD 正,点E 为CD 的中点,,PE CD ∴⊥平面PCD ⊥平面ABCD ∵平面PCD 面ABCD CD =PE ∴⊥面ABCD ,设F 是AB 中点,以E 为原点,EF 所在直线为x 轴,EC 所在直线为y 轴,EP 所在直线为z 轴建立空间直角坐标系,….…….……3分则3(2,1,0),(2,1,0),(0,1,0)(0,0,)2A B D M ---,3(2,2,0),(2,1,),2BD BM ∴=--=--设面BDM 的法向量(,,)n x y z =,则2203202x y x y z --=⎧⎪⎨--+=⎪⎩,令1x =,可得2(1,1,3)3n =-又面ABD 的法向量(0,0,1)m = ,则23103cos ,54123m n <>==⨯+所以平面BDM 和平面ABD 夹角的正弦值为155….…….…….……8分(2)设(0,0,)(03)M m m ≤≤,(1,1,0)N 则(1,1,),(2,2,0),(0,1,)NM m BD DM m =-=--=设平面BDM 的法向量为(,,)n a b c =,则2200n BD a b n DM b mc ⎧⋅=--=⎨⋅=+=⎩,令1b =-,有11,1,n m ⎛⎫=- ⎪⎝⎭,.….…….……10分设直线NM 与平面BDM 所成的角θ,所以2222111sin cos ,3112252()n NM n NM n NMm m m mθ⋅====≤⋅+⋅+++,Y3060120P141214当且仅当1m =时取等号,所以当1m =时,θsin 取最大,⎪⎭⎫ ⎝⎛∈20πθ, 即直线AM 与平面BDM 所成角最大.1,3EM EP ∴==,33ME PE ∴=时,直线AM 与平面BDM 所成角最大...…….……15分18.(1)因为()1ln 2g x x ax =-,()22ax g x x -=',.…….……1分①当0a ≤时,因为[]1,x e ∈,所以()0g x ¢>,所以函数()g x 在[]1,e 上单调递增,则()()max112g x g e ae ==-;.…….……2分②当2e a ≥,即20a e<≤时,[]1,x e ∈,()0g x ¢³,所以函数()g x 在[]1,e 上单调递增,则()()max112g x g e ae ==-;.…….……4分③当21e a <<,即22a e <<时,函数()g x 在21,a ⎛⎫ ⎪⎝⎭上单调递增,在2,e a ⎛⎫ ⎪⎝⎭上单调递减,则()max 22ln 1g x g a a ⎛⎫==- ⎪⎝⎭;.…….……6分④当201a<≤,即2a ≥时,[]1,x e ∈,()0g x '≤,函数()g x 在[]1,e 上单调递减,则()()max 112g x g a ==-..…….……8分综上,()max121222ln 12122ae a e g x a ae a a ⎧⎪⎪⎪=⎨⎪⎪⎪-≤-<<-≥⎩,,,.…….……9分(2)对于任意的12(0,)x x ∈+∞,,12x x ≠,有1212()()1f x f x x x -<-则()()121122x x f x x f x x -><-不妨设时,,.…….……11分令()()(),0,F x f x x x ∞=-∈+,根据题意对任意的()12,0,x x ∈+∞,当12x x >时,()()12F x F x <,所以函数()()F x f x x =-在()0,∞+上单调递减,.…….……13分所以()()1ln 0F x f x x ax =-=-'≤'在()0,∞+上恒成立,即ln xa x≤在()0,∞+上恒成立..…….……14分令()()ln ,0,x g x x x=∈+∞,则()21ln x g x x -=',所以当()0,e x ∈时,()0g x '>,()g x 单调递增,当()e,x ∈+∞时,()()0,g x g x '<单调递减.所以()max 1()e e g x g ==,所以1ea ≥..…….……17分19.(17分)(1)设恰有3次得到6点朝上的概率为()()3336C 1f p p p =⋅-,.…….……2分则()()()()()23233624223C 3131C 3112f p p p p p p p p ⎡'⎤=---=⋅⎣⋅--⎦,01p <<,令()0f p '=,得12p =,所以当102p <<时,()0f p '>,()fp 单调递增;当112p <<时,()0f p '<,()f p 单调递减,故()f p 的极大值点012p =..…….……4分(2)设事件A ={3次6点朝上},事件B ={选择了乙骰子},则()412P AB ⎛⎫= ⎪⎝⎭,()()()43111226P A P AB P AB ⎛⎫⎛⎫=+=+⨯ ⎪ ⎪⎝⎭⎝⎭,所以所求概率为()()()443127228111226P AB P B A P A ⎛⎫⎪⎝⎭===⎛⎫⎛⎫+⨯ ⎪ ⎪⎝⎭⎝⎭..…….……9分(3)设事件B k ={10次有k 次用了乙骰子}()0,1,2,,10k =⋅⋅⋅,则()10101C 2k k P B ⎛⎫= ⎪⎝⎭.设事件D ={10次6点朝上},则()101126k kk P D B -⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭.()()()()()()()00111010P D P B P D B P B P D B P B P D B =++⋅⋅⋅+1010101910100110101010111111111C C C 226226226⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫=++⋅⋅⋅+ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭101010101111222623⎛⎫⎛⎫⎛⎫⎛⎫=+=⨯ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭,()()()()101010101010101011111C C 22626122233k kk kk k k k P B D P X k P B D P D --⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭=====⎛⎫⎛⎫⎛⎫⨯ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭.….……13分令10101011C 2623k kk k a -⎛⎫⎛⎫ ⎪ ⎪⎝⎭⎝⎭=⎛⎫ ⎪⎝⎭,0k a >,则()()()1011109!1!C 10!10,1,,93C 3(10)!!10!303kk k k k k a k k a k k k++-++==⨯==-- .令()11113331,,9111303k k k k a k a k k a k k a -+⎧⎧≤≤⎪⎪⎪⎪-=⎨⎨+⎪⎪≥≥⎪⎪-⎩⎩ ,即433429≤≤∴k .….……15分所以k a 的最大值是8a ,所以当8X =时()P X 最大,且最大值为82810102101081011C C 3326450.0560.283644235a ⎛⎫⎛⎫ ⎪ ⎪⎛⎫⎛⎫⎝⎭⎝⎭==⨯⨯=⨯⨯= ⎪ ⎪⎝⎭⎝⎭⎛⎫≈ ⎪⎝⎭.…….……17分。
幼儿园中班科学活动教案《神奇的三脚架》

幼儿园中班科学活动教案《神奇的三脚架》教学目标1.能认识三脚架并掌握其主要结构和作用,培养幼儿的观察能力和动手能力;2.能够进行简单的观察实验,培养幼儿的科学思维和实验技能。
教学准备1.教学PPT;2.三脚架模型;3.直尺、木块、塑料瓶、羽毛球、吹风机等实验器材。
教学步骤Step 1 引入大家好,今天我们要来学习一种神奇的仪器,你们猜猜这是什么?(引导幼儿猜测)对,这就是三脚架!你们还记得我们之前学过的小平衡木吧,它和三脚架有些相同,也有些不同。
现在我们来一起玩一下三脚架,看看它有什么不一样的地方。
Step 2 三脚架的结构请看PPT上的图片,这就是三脚架的模型。
大家可以看到,它由三根支脚和一个与之相连的横杆组成。
那么,这三个支脚有什么作用呢?它们可以分别与各种实验器材固定,让我们可以更方便地进行实验哦!Step 3 实验时间好了,现在我们来体验一下三脚架的魔力吧!(拿出实验器材)请看这个塑料瓶,我们可以将它的底部剪去一部分。
然后,用木块将它卡在三脚架上,就像这样。
(示范操作)接着,我们可以放一些轻盈的羽毛球在塑料瓶里面。
你们瞧,这些球轻飘飘的,随风而动。
但是,如果我们用吹风机向这些羽毛球吹气,会发生什么呢?(引导幼儿思考)对啦,这些球就会变得疯狂起来,很难受控制了!Step 4 思考探究为什么会这样呢?我们可以想一想。
羽毛球很轻,所以受到吹风机的吹气影响,就会变得很难受控制。
那么如果我们换成另一种物体呢?比如这个小球,我们可以把它放在塑料瓶里。
接下来,我们可以让幼儿自己探究:如果用吹风机向它吹气,会发生什么样的变化呢?围着实验室里一起探究吧!Step 5 结束好了,我们今天就学习到这里了。
你们学会了什么?(引导幼儿回答)对啦,我们学会了三脚架的结构和作用,还进行了一些有趣的实验。
希望大家都能在今后的学习生活中,善于运用自己的智慧,探索更多未知的领域!总结通过这次科学活动,幼儿们了解了三脚架的结构和作用,并进行了简单实验,培养了他们的观察能力和动手能力,激发了他们的好奇心,加深了他们对科学事物的认识和认识能力。
第二章 水准测量 (2)

改正后的高差的计算
计算公式: 改正后的高差=高差观测值+改正数
计算各点的高程
1.计算公式: 由已知点的高程+改正后的高差逐一推求 2.计算校核: 由终点前一点的高程推求终点的高程=终点的 已知高程,计算正确,否则重新计算
本例 43.993+4.653=48.646
本次课的主要内容: 水准路线闭合差的调整与高程计算步骤 共分成以下4个步骤: 1.高差闭合差的计算 2.高差闭合差的调整 3.计算改正后的高差 4.计算各点的高程 重点: 水准路线闭合差的调整与高程计算步骤 难点: 高差闭合差的调整
水准测量实施原理过程
原理过程
水准测量进行时,当所测两点距离 较远或高差过大时,不可能安置一 次仪器就测出两点间高差必须先选 若干个点将测量路线分成若干测段, 逐段安置仪器,依次测得各段高差 而后测算两点的高差。
举例
选定的若干个过渡点叫转点
转点:它即是上一测站前视点又是后 一测站的后视点,它起着传递高程的 作用,它的任何变动会直接影响B点 的高程。 所以转点必须选择在坚实的地面上, 并将尺垫置稳踩实。
105.420 107.428
109.672
3
B ∑
108.327
116.880
高差闭合差 fh 的计算
闭合差=观测值-理论值
1.计算公式: fh= ∑h测-(H终- H始) (附合水准路线)
本例 fh= 8.847 -(48.646-39.833 )=+34mm
2.计算允许闭合差:Biblioteka fh允=±12水准测量示意图
a2
a1
b1 I1 I2 TP1
a3
b2 I3
b3 a4 I4 TP3 B
2024年神奇的三脚架大班科学教案

2024年神奇的三脚架大班科学教案一、教学内容本节课选自《幼儿园大班科学活动教材》第四章“力的探索”,详细内容为“神奇的三脚架”。
通过学习三脚架的稳定性原理,让幼儿了解三角形在生活中的应用,培养幼儿的观察力、思考力和动手操作能力。
二、教学目标1. 了解三脚架的稳定性原理,知道三角形在生活中的应用。
2. 能够通过实践操作,探索三脚架的稳定性,培养动手操作能力。
3. 增强对科学现象的好奇心,激发幼儿探索科学的兴趣。
三、教学难点与重点重点:三脚架的稳定性原理,三角形的特征。
难点:让幼儿理解三角形在生活中的应用,培养幼儿的观察力和思考力。
四、教具与学具准备1. 教具:三脚架模型、三角形物品(如三明治、自行车三脚架等)、图片、实验器材。
2. 学具:画纸、彩笔、剪刀、胶水、三角板、积木。
五、教学过程1. 实践情景引入:出示三脚架模型,让幼儿观察并讨论其在生活中的应用。
2. 例题讲解:讲解三脚架的稳定性原理,引导幼儿了解三角形的特征。
b. 演示三脚架稳定性实验,让幼儿观察并思考原因。
3. 随堂练习:发放画纸、彩笔等材料,让幼儿动手绘制三角形,并尝试搭建三脚架模型。
六、板书设计1. 板书神奇的三脚架2. 板书内容:a. 三角形的特征:三边、三个角、稳定不易变形。
b. 三脚架稳定性原理:三角形结构,稳定性强。
七、作业设计1. 作业题目:找一找生活中的三角形,并记录下来。
2. 答案示例:自行车三脚架、三明治、衣架、三角形积木等。
八、课后反思及拓展延伸1. 反思:本节课幼儿对三脚架的稳定性原理和三角形的特征有了初步的认识,但在动手操作过程中,部分幼儿对三角形的绘制和搭建存在一定困难。
2. 拓展延伸:a. 鼓励幼儿在家庭和学校中寻找三角形物品,加深对三角形特征的理解。
b. 组织一次“三角形创意画”活动,让幼儿运用所学知识进行创作。
c. 结合其他学科,如数学、美术等,开展三角形相关教学活动,提高幼儿的综合运用能力。
重点和难点解析:1. 教学难点与重点的确定。
数学中最稳定的结构
数学中最稳定的结构
一、三角形——稳定的代表
嘿,小伙伴们!说到数学中最稳定的结构,那三角形肯定是当仁不让啦!
你看,三角形的三条边相互支撑,形成了一个稳固的形状。
不管你怎么拉扯、挤压,它都能保持自己的形状不变。
就像我们生活中的三脚架,稳稳地支撑着相机,让我们能拍出清晰的照片。
而且在建筑领域,三角形的结构也被广泛应用。
比如那些高大的桥梁,它们的支撑结构中就有很多三角形,能够承受巨大的重量和压力,保证桥梁的安全和稳定。
二、三角形稳定性的原理
那三角形为啥这么稳定呢?这是因为三角形的三条边长度一旦确定,它的形状和大小也就确定了。
这就好比我们三个人手拉手组成一个三角形,只要我们的位置不变,这个三角形的形状就不会变。
而其他多边形,比如四边形,它的角度和边长可以变化,所以就没有三角形那么稳定。
三、三角形稳定性在生活中的应用
三角形的稳定性在我们的日常生活中可是无处不在哦!
除了刚刚说的三脚架和桥梁,还有自行车的车架,也是利用了三角形的稳定性,让我们骑起来更加安全和顺畅。
家里的晾衣架,很多也是三角形的结构,这样衣服挂上去就不会摇摇晃晃啦。
甚至在一些艺术设计中,三角形的稳定性也被巧妙地运用,让作品更加美观和独特。
三角形作为数学中最稳定的结构,真的是太厉害啦!它不仅在数学的世界里闪闪发光,还在我们的生活中发挥着巨大的作用,让我们的生活更加美好和便捷!。
山顶间测距原理_概述说明以及解释
山顶间测距原理概述说明以及解释1. 引言1.1 概述山顶间测距原理是一种应用于测量两个山顶之间距离的方法。
通过使用特定的工具和设备,以及一系列的测量过程和步骤,可以准确地计算出两个山顶之间的距离。
这项技术在地理测量、航空导航、地理信息系统等领域中得到广泛应用。
1.2 文章结构本文将首先介绍山顶间测距原理的基本概念和背景。
然后,我们将详细讨论该原理的理论基础以及所需的测距工具和设备。
接下来,将介绍实际进行山顶间测距时所涉及的具体步骤和流程。
随后,我们将对该原理进行解释,并分析其可行性及适用领域。
最后,根据研究结果总结出结论。
1.3 目的本文旨在深入探讨山顶间测距原理,详细介绍其背后的理论基础和操作过程,并解释其应用领域及意义。
通过对该原理进行分析和讨论,希望能够提供给读者一个全面了解山顶间测距的视角,并推动该技术在各个领域的应用和发展。
2. 山顶间测距原理:2.1 理论基础:山顶间测距是一种用于测量两个或多个山顶之间的水平距离的方法。
该原理基于三角测量法,利用几何关系和数学计算来确定两个山顶之间的距离。
三角测量法是通过在一个三角形中已知其中两边长度以及夹角,就可以计算出第三边的长度。
在山顶间测距中,我们利用已知的数据如指南针方向和高度差来构建一个虚拟的三角形,并使用三角函数来计算出目标山顶与当前位置之间的水平距离。
2.2 测距工具和设备:进行山顶间测距需要准备以下工具和设备:- 指南针:用于确定当前位置与目标山顶之间的方向。
- 测量绳/带:用于测量高度差。
- 海拔仪: 用于确定当前位置和目标山顶之间的高度差。
2.3 测量过程和步骤:进行山顶间测距时,请按以下步骤进行操作:1. 使用指南针确定当前位置与目标山顶之间的方向,并记录下该方向。
2. 根据实际情况测量当前位置与目标山顶之间的高度差,并记录下该数值。
3. 根据测得的方向和高度差,构建三角形模型。
4. 使用三角函数(如正弦定理或余弦定理)来计算山顶之间的水平距离。
三角形稳定性的背后隐藏着什么秘密
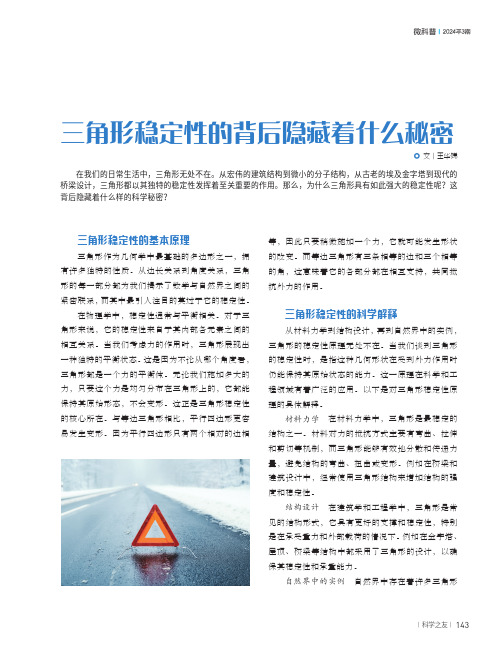
|科学之友|143三角形稳定性的基本原理三角形作为几何学中最基础的多边形之一,拥有许多独特的性质。
从边长关系到角度关系,三角形的每一部分都为我们揭示了数学与自然界之间的紧密联系,而其中最引人注目的莫过于它的稳定性。
在物理学中,稳定性通常与平衡相关。
对于三角形来说,它的稳定性来自于其内部各元素之间的相互关系。
当我们考虑力的作用时,三角形展现出一种独特的平衡状态。
这是因为不论从哪个角度看,三角形都是一个力的平衡体。
无论我们施加多大的力,只要这个力是均匀分布在三角形上的,它都能保持其原始形态,不会变形。
这正是三角形稳定性的核心所在。
与等边三角形相比,平行四边形更容易发生变形。
因为平行四边形只有两个相对的边相等,因此只要稍微施加一个力,它就可能发生形状的改变。
而等边三角形有三条相等的边和三个相等的角,这意味着它的各部分都在相互支持,共同抵抗外力的作用。
三角形稳定性的科学解释从材料力学到结构设计,再到自然界中的实例,三角形的稳定性原理无处不在。
当我们谈到三角形的稳定性时,是指这种几何形状在受到外力作用时仍能保持其原始状态的能力。
这一原理在科学和工程领域有着广泛的应用。
以下是对三角形稳定性原理的具体解释。
材料力学 在材料力学中,三角形是最稳定的结构之一。
材料对力的抵抗方式主要有弯曲、拉伸和剪切等机制,而三角形能够有效地分散和传递力量,避免结构的弯曲、扭曲或变形。
例如在桥梁和建筑设计中,经常使用三角形结构来增加结构的强度和稳定性。
结构设计 在建筑学和工程学中,三角形是常见的结构形式,它具有更好的支撑和稳定性,特别是在承受重力和外部载荷的情况下。
例如在金字塔、屋顶、桥梁等结构中都采用了三角形的设计,以确保其稳定性和承重能力。
自然界中的实例 自然界中存在着许多三角形在我们的日常生活中,三角形无处不在。
从宏伟的建筑结构到微小的分子结构,从古老的埃及金字塔到现代的桥梁设计,三角形都以其独特的稳定性发挥着至关重要的作用。
摄影公式数学
摄影公式数学
摄影公式数学是一门学科,它结合了数学原理与摄影实践,提供了许多摄影技术的实际应用。
摄影公式数学可以帮助我们更好地理解摄影技术,并让我们知道如何运用其中的原理来捕捉一张可视化的美丽作品。
摄影公式数学是一门技术性的学科,它集合了许多数学原理,如向量、几何、三角学及其他技术性的知识,以帮助拍摄者了解摄影技术的基本原理。
摄影公式数学可以帮助摄影者更好地把握所拍摄的形体及其背景,以此拍出更加精美的作品。
摄影公式数学也是一个实践性的学科,因为它不仅需要理解数学原理,而且需要将它们运用到摄影技术实践中,从而熟悉相机及其控制元件,如快门、光圈和感光度。
理论与实践的结合将有助于使摄影者更好地把握摄影技术,提高拍摄效果。
摄影公式数学的实践也可以引导摄影者熟悉不同的光线环境,并了解如何利用不同的光源调整色调及亮度。
这一学科也涉及到如何把握室内、室外的拍摄环境,以便营造出最佳的摄影环境。
摄影公式数学也可以指导摄影者如何使用各种各样的设备,如照相机、望远镜、三脚架等,以及如何利用其中的各项技术来拍出精美的作品。
最后,摄影公式数学还可以帮助摄影者弄清晰的概念,如拍摄风格、透视及色彩理论,以达到更好的效果。
因此,摄影公式数学对于摄影者而言是一门十分有用的学科,其原理可以帮助摄影者从理论到
实践,在拍摄中达到最佳的技术水平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三脚架的数学原理
四川省南部中学蒲筱平
三脚架是主要由三条杆材连接而成的支撑结构。
作为承重工具,更重要的是作为在空间中固定物体位置的固定工具,三脚架在生产和生活的各个领域都有广泛的应用。
关于三脚架的数学原理,我看到已有两种解释。
一种解释说其原理是利用三角形的稳定性,使架于其上的物品获得一个稳定的支撑,而不易翻倒。
另一种解释说其原理是利用经过不在同一条直线上的三个点,有且只有一个平面。
也称为不在同一条直线上的三个点确定一个平面。
此说法我设想其典型化的解释:把3个球放在地面上,使它们不在同一条直线上(3个球视为不在同一条直线上的三个点),放一块平板(视为平面)在这3个球上(即经过这三个点有一个平面),这3个
球能支撑住平板(即经过这三个点只有一个平面)——虽然如此,但并不唯一地确定被支撑物的位置。
以上两种解释分别用初中数学的平面几何中三角形的稳定性,高中数学的立体几何中关于平面的公理解释三脚架的原理。
看似有理,其实是不相关的:三脚架的原理其实是用3条线段(即三脚)及3个点(即脚的着地点)确定一个点(被支撑物)的位置,而不是用3条线段的长度确定三角形的形状和大小(三角形的稳定性),也不是用3个点
确定一个平面。
从数学的角度说,三脚架的原理(不妨称为三脚架定理)是:空间中,球心不在同一条直线上的两两相交的3个球个球面
的球心所在平面的某一侧,有且只有一个。
3面的公共点,在.
现阐述如下:
一、定义:
图形(1)球面:空间中到定点O的距离等于定长r(r≥0)的点的集合,称为以点O为球心r为半径的球面,其中定点O称为该球面的球心,定长r称为该球面的半径。
球面也是空间中到定点的距离等于定长的所有点组成的图形,还可以看作半圆绕其两个端点确定的直线旋转一周形成的图形。
不妨用小写希腊字母α、β、γ…等来记球面。
半径r=0的球面其实是一个点,可以称为点球面,为了方便,以下提到的球面都是指r>0的球面。
⑵位置关系
①点与球面:设点P到半径为r的球面α的球心O的距离为d。
当d<r 时,称点P在球面α内;当d=r时,称点P在球面α上;当d>r时,称点P在球面α外。
点P在球面α上,也可称球面α经过点P;点P 在球面α内和点P在球面α外都可称球面α不经过点P。
②直线与球面:设半径为r的球面α的球心O到直线a的距离为d。
当d<r时,称直线a与球面α相交;当d=r时,称直线a与球面α相切;当d>r时,称直线a与球面α相离。
③平面与球面:设半径为r的球面α的球心O到平面β的距离为d。
当d<r时,称平面β与球面α相交;当d=r时,称平面β与球面。
相离α与球面β平面时,称r>d;当相切α.
④两个球面:设两球面α,α的半径分别为r,r,两球心的距2211离为d。
当d> r+r时,称球面α,α外离;当d= r+r时,称球面α,1122211α?<d <r?时称-r=? rα相交?;当r-r;当0<d ,+r时称球面α外切212212211?时称球面α?-r r<?,α内切;当0=d =? r-r重合;当d 球面α,α21212121时称球面α,α内含;当d =0时称球面α,α同心。
2121⑤圆与球面:
,平面α与球面β的位置有且只有3种:设圆a所在的平面为α切点与圆a的位置有与球面β相切时,相离,相交,相切;平面α且只有3种:切点在圆外,切点在圆上,切点在圆内;平面α与球面β相交时,公共部分组成一个圆(不妨称为交圆),圆a与交圆的位置按照初中数学中的方法分外离,外切,相交(此时可称圆a与球面β相交),内切,内含(包括同心),重合(此时可称圆a在球面β上或称球面β经过圆a)等6种。
这样可以一一对应地确定出圆与球面的10种位置关系。
二、定理
定理1、两球面α,α:外离时,公共点数为0;外切时,公共21点(可称外切点)数为1,该点与两个球心在同一条直线上;相交时,有无数个公共点,所有公共组成一个圆,过两球面α,α的球心的21直线经过该圆的圆心并且垂直于该圆所在的平面;内切时,公共点(可称内切点)数为1,该点与两个球心在同一条直线上;重合时,所有公共组成一个球面,此时3个球面重合;内含时,公共点数为0。
那么圆与球面相交,如果圆与球面有且只有两个公共点,、2定理.
当球心在圆确定的平面上时,这两个公共点关于圆心与球心确定的直线对称;当球心不在圆确定的平面上时,这两个公共点连线段的中点、圆心、球心不在同一条直线上,它们确定一个平面(记为平面Γ),这两个公共点关于平面Γ成镜面对称。
定理3、如果圆与球面有3个公共点,那么它们有无数个公共点,所有公共点组成的图形就是该圆。
定理4、球心不在同一条直线上的3个球面的公共点的数量只能为0或1或2;当只有一个公共点时,该公共点与3个球面的球心在同一个平面内;当有两个公共点时,这两个公共点位于3个球面的球心确定的平面之外,分居该平面的两侧,且关于该平面成镜面对称.
由定理4立即可得
定理5(三脚架定理):空间中,球心不在同一条直线上的两两相交的3个球面的公共点,在3个球面的球心所在平面的某一侧,有且只有一个。
三、三脚架定理的解释
三脚架使用其3脚(线段)与3个落脚点(不在同一条直线上)来固定3脚的交汇点(下面简称交汇点)。
实质是用不在同一条直线上的3个点和3条线段,在3个点确定的平面的一侧决定一个点的位置。
三脚架一脚的长度及其落脚点都确定时,交汇点到该落脚点(定点)的距离等于相应的脚的长度(定长),因此交汇点在以落脚点为即交汇对三脚架的每一脚都如此,球心以脚的长度为半径的球面上;
点是分别以3个落脚点为球心,相应的脚的长度为半径的3个球面的
公共点。
三脚架工作时任何两脚都不在同一条直线上,它们的落脚点与交汇点形成一个三角形,根据三角形三边长度的不等关系,两落脚点(球心)之间的距离大于两脚长度(半径)之差,且小于两脚长度(半径)之和,因此两球面相交。
于是,该3个球面是两两相交的,即三脚架的的交汇点是球心不在同一条直线上的两两相交的3个球
面的公共点。
由三脚架定理知,当3个落脚点不在同一条直线上时,在它们确定的平面的一侧——通常取平面的上方(这是由万有引力确定的),上述3个球面的公共点必定是唯一固定的,即交汇点的位置是被唯一固定的。
因此,当三脚架3脚的长度与3个落脚点(不在同一条直线上)固定时,三脚架上被支撑物的位置就固定不变了。
.。