高灵敏度GPS接收机中的互相关减轻算法研究
一种快速精确GPS多径误差消除组合算法
一种快速精确GPS多径误差消除组合算法作者:张洋王新龙来源:《航空兵器》2013年第05期摘要:多径效应是影响GPS定位精度的一个重要因素,由于多径信号的数量与路径无法确定,且其衰减幅度与延迟时间难以模型化,导致多径效应难以预测,其误差也难以消除。
在分析 TK和MLE两种典型算法特点的基础上,提出了一种TK-MLE组合多径参数估计算法。
该算法通过使用TK算法快速粗估计多径信号延迟路径数和延迟时间,以确定MLE算法搜索维数并缩小了其搜索范围,使得组合算法具有计算量小、精度高以及适用范围更广的优点。
仿真结果表明组合多径参数估计算法在复杂情况下具有良好的工作性能。
关键词:GPS接收机;多径误差;TK算法;MLE算法中图分类号:V249.32+8 文献标识码:A 文章编号:1673-5048(2013)05-0030-06AFast&PreciseCombinedAlgorithmforGPS MultipathErrorEliminationZHANGYang,WANGXinlong(SchoolofAstronautics,BeijingUniversityofAeronauticsandAstronautics,Beijing100191,China)Abstract:MultipatheffectisamaincauseoftheerrorsinthepositionbyGPS.Asitisimpossibleto directlymeasurethepathandnumberofsignals,anddifficulttoestablishamodelofitsattenuationextent anddelaytime,itishardtopredicttheeffectcausedbymultipathsignalaswellasreducetheerrorsof theGPS.Basedonseparateanalysis,twotraditionalalgorithms,TKandMLE,arecombinedintoanew algorithm.Whilecomputingmultipathparameterwiththenewalgorithm,TKalgorithmisusedtoestimate thedelaypathnumberandtimeofmultipathsignalcoarsefasttomakeclearsearchdimensionandreduce searchrange.Thusthecombinedalgorithmhascharacteristicsoflesscomputation,highprecisionand largeusingscale.Theresultofsimulationresearchshowsthatthisnewalgorithmhasagoodperformance incomplexsituations.Keywords:GPSreceiver;multipatherror;TKalgorithm;MLEalgorithm0 引言GPS接收机所接收的信号有两类,包括直达以及反射的信号,这两种信号相叠加,被接收机接收后产生干涉从而影响码和相位的量测。
高灵敏度GPS软件接收机捕获算法
高灵敏度GPS软件接收机捕获算法魏玲玲;范胜林;王顺亮;刘建业【摘要】针对传统方法难以实现室内环境下GPS信号的捕获以及传统弱信号捕获算法的一系列弊端,介绍了一种新的捕获算法.由于数据段通过“先累加后相关”的方式进行相干积分可以减少运算量,以此方法改进的半位捕获法进行数据段选择可以避免导航数据位翻转,并且改进后的差分相干积分能够减小非相干积分造成的“平方损失”和改善信噪比.融合上述优点,提出了一种新的算法,为高灵敏度GPS软件接收机的实现提供了保证.仿真结果表明,此算法极大的提高了接收机的捕获性能,并且能够快速捕获到载噪比低至25dB/Hz的微弱信号.%Traditional method is difficult to achieve the acquisition of GPS signals in indoor environments, as well as the traditional weak signal acquisition algorithm for a series of problems, a new acquisition algorithm was introduced to solve this problem. Because the coherent integration which uses the data segments that use fusion of first summation then relevance idea can reduce the computational complexity, and the improving semi-bit acquisition method can avoid navigation data bit transition, the improving differential correlation method can reduce "square loss" which produced by non-coherent integration and improve the signal to noise ratio, a new algorithm was proposed which merges all the advantages. The new method can provide a basis for GPS receiving technology with high sensitivity. The experimental results showed that, the algorithm greatly improves the acquisition performance of the receiver and was able to acquire the GPS signal with carrier noise ratio down to 25 dB/Hz.【期刊名称】《指挥控制与仿真》【年(卷),期】2012(034)005【总页数】5页(P50-54)【关键词】先累加后相关;差分相干积分;载噪比;快速捕获【作者】魏玲玲;范胜林;王顺亮;刘建业【作者单位】南京航空航天大学导航研究中心,江苏南京210016;南京航空航天大学导航研究中心,江苏南京210016;南京航空航天大学导航研究中心,江苏南京210016;南京航空航天大学导航研究中心,江苏南京210016【正文语种】中文【中图分类】TN976.1全球定位系统(GPS)作为目前世界上最完善的全球导航卫星系统,可为地球表面、近地表和地球外空任意地点用户提供全天候、实时、高精度的三维位置、速度以及精密的时间信息,在军事和民用领域已经得到了非常广泛应用[1]。
无线应用中高灵敏度GPS接收机的设计(参考)

最近中国成功发射了第三颗“北斗一号”导航定位卫星,它预示着中国GPS应用的高潮即将来临。
本文向(中国)GPS设计工程师介绍在将GPS模块嵌入到其它无线通信系统过程中,如何将无源天线与GPS芯片组紧密结合起来,并达到噪声极低、灵敏度极高、线性度极佳和成本最低的设计策略。
本文分析了直接将无源天线集成至GPS系统对系统性能的影响问题。
由于我们所讨论的系统采用了低增益低噪声的射频前端,系统间干扰较低,而且优化了模数转换器的装载方式,所以可以实现系统中GPS射频部分和高灵敏无源天线之间的连接。
同时,耦合结构的精心设计又降低了接收机内的干扰。
因而,得到的GPS接收机能够应用于移动无线通信频率范围,并具备高灵敏度和优化的抗干扰性能。
本文给出了接收机动态范围、灵敏度和干扰情况的试验结果和仿真结果。
由于系统内部隔离度较好,所以包括射频和数字基带部分在内,载噪比(carrier-to-noise ratio)总衰减低于5dB。
问题的提出将GPS集成到便携式移动设备中可以提供覆盖面积更广的定位服务。
最近已有人提出并实现了基于定位技术的网络,然而这类基于网络的定位方法准确度依赖于基站的数目、基站与移动用户的几何位置,以及多径效应。
混合定位方法则将具备定位能力的GPS和蜂窝通信系统结合起来,不论在农村或城市均能提供覆盖面积很广的定位能力。
将GPS集成到无线移动通信应用中时,所需成本、占位面积和功耗会严重束缚GPS接收机的设计,这一点与独立式GPS一样会降低载噪比。
为了满足要求,必须采用高线性度、低噪声和低功耗的GPS接收机。
而且,如果接收机的各个电路区域之间以及各电路和天线结构之间隔离不足,均会引发系统内干扰(或称内部噪声)和系统间干扰(也称外部噪声),从而造成GPS性能下降。
本文描述了GPS接收机中,由系统间或系统内隔离不足造成的载噪比下降,以及下降机制,还描述了单独的GPS接收机特性和带无源天线的GPS接收机集成到无线应用中之后得到的性能结果。
高精度GPS信号处理技术研究
高精度GPS信号处理技术研究一、绪论GPS定位技术已经成为了现代导航和地理信息领域中最为重要的技术手段之一。
而高精度GPS信号处理技术是GPS定位技术发展的关键因素之一,其在农业、交通、航空等领域中都有着广泛的应用。
因此,我们有必要对高精度GPS信号处理技术进行系统研究和探讨。
二、高精度GPS信号处理技术的基本原理对于GPS定位技术的原理,我们不再赘述。
在GPS定位技术中,接收机一般采用P码或者C/A码(精确码和普通码)解码技术,通过对GPS卫星信号的处理,计算出接收机与卫星的距离,再根据至少4颗卫星的距离可计算出接收机的位置。
而高精度GPS信号处理技术则需要对GPS信号进行更精细的处理,以得到更为精确和可靠的定位结果。
其中主要有以下几种处理技术:1.差分GPS技术:该技术主要是指对接收机和参考站之间的距离进行实时差分计算,以消除大气等误差,并提高信号精度。
2.多晶体振荡器技术(MDP):该技术是利用高性能的多晶体振荡器对GPS信号进行更为精细的同步处理,以提高信号精度和时间分辨率。
3.数字信号处理(DSP)技术:该技术主要是指对GPS信号进行数字处理,包括滤波、去噪、降采样等,以提高定位精度。
4.高精度数据解码技术:该技术是将相邻两段数据进行匹配,并用Kalman滤波技术进行平滑处理,以减少数据收集过程中的误差。
5.高精度时钟技术:该技术是通过使用更为精细的时钟,以减少定位过程中时间差的误差。
6.高精度卫星轨道预报技术:该技术是利用卫星公开的轨道元素数据,对卫星的轨道进行高精度预报,以提高GPS信号的精度。
三、高精度GPS信号处理技术的应用随着GPS技术的不断发展和应用,高精度GPS信号处理技术也在不断完善和提高。
目前,高精度GPS信号处理技术在以下领域都得到了广泛的应用:1.航空领域:高精度GPS信号处理技术可以应用于飞机和其他航空器的导航和控制系统中,以提供更为精确和可靠的定位和导航服务。
弹载高灵敏度测频接收机的研究与实现的开题报告

弹载高灵敏度测频接收机的研究与实现的开题报告题目:弹载高灵敏度测频接收机的研究与实现一、选题背景及意义随着现代战争的发展,电子战已经成为一种不可缺少的作战手段。
在电子战中,载波频率的监测和识别是非常重要的,这就需要高灵敏度的测频接收机来完成。
然而,在弹头等高速飞行器上安装这样的设备非常复杂,需要考虑到电磁干扰、机械振动、温度变化等因素。
因此,开发一种弹载高灵敏度测频接收机是非常有必要的。
二、研究内容及方法本项目旨在研究一种适用于弹头等高速飞行器的高灵敏度测频接收机,具体内容包括以下几个方面:1. 分析电子干扰的特点,设计适应弹载环境的高灵敏度测频接收机。
2. 设计高灵敏度的射频前端,包括低噪声放大器、射频滤波器等。
3. 确定适合弹载环境的数字信号处理系统,包括采样、滤波、数字信号处理等。
4. 进行实验验证,考虑到实际应用中的噪声、干扰等因素,测试接收机的灵敏度和可靠性,并对实验结果进行分析。
方法上,将采用文献调研、仿真建模、实验验证等方法进行研究。
三、预期成果及应用价值本项目的预期成果包括:1. 完成一种适用于弹头等高速飞行器的高灵敏度测频接收机的设计与实现。
2. 对接收机的性能进行测试,包括灵敏度、稳定性等指标,验证其在实际应用中的可靠性。
3. 对接收机的应用进行探索,如在电子战中的频率监测、识别、干扰等方面的应用。
本项目的应用价值主要在于:1. 为电子战等领域提供了一种高灵敏度、适应弹载环境的测频接收机设备。
2. 推动国内电子战技术的发展,提高我国军队的战斗力和综合实力。
3. 拓展电子信息领域的新技术、新应用,促进相关产业的发展。
四、研究进度安排1. 第一阶段(3周):对弹载高灵敏度测频接收机进行需求分析和文献调研。
2. 第二阶段(4周):设计高灵敏度的射频前端,并开展相关仿真实验。
3. 第三阶段(4周):确定数字信号处理系统,完成接收机的设计和实现。
4. 第四阶段(3周):对接收机进行实验验证,并分析实验结果。
GPS接收机的灵敏度分析
GPS接收机的灵敏度分析GPS接收机的灵敏度分析根据GPS 接收机的定位原理和GPS 接收机灵敏度分析接收机性能,发现灵敏度主要与前端电路和基带有着密切关系。
据此对GPS 的天线前端电路设计滤波器和低噪声放大器,并对电路的其他方面提出要求,考虑包含处理器和大量逻辑门电路的Cyclo ne 器件,并通过配置嵌入式软核处理设计GPS 接收机。
GPS 系统在海运方面因能够提供连续、高精度的船位,在保证船舶安全经济方面和保证在计划航线上航行有着极为重要的作用。
高灵敏度的GPS 接收机要求接收机在卫星信号较弱的场景下仍然能够实现定位和跟踪。
GPS 接收系统的灵敏度指标包括跟踪灵敏度、捕获灵敏度和初始启动灵敏度。
目前GPS 接收机基本上可以实现跟踪灵敏度在- 160 dBm 以下,同时初始启动的灵敏度和捕获灵敏度也分别可以达到- 142dBm 和- 148 dBm 以下。
1 GPS 接收机灵敏度分析GPS 接收机的灵敏度主要由两个方面决定:一是接收机前端信号通路的增益及噪声性能,二是基带部分的算法性能。
接收机前端决定了接收信号到达基带部分时的信噪比; 基带算法则决定了解调、捕获、跟踪过程需要最小信噪比。
GPS 卫星的导航载波信号是L 频段(L 1 :19cm; L2 :24 cm)的电波信号,现行GPS 工作卫星采用L 波段的三种导航信号,分别为L 1、L2、L3 ,其载波频率分别为:1 575 42、1 227 60 和1 381. 05 MHzGPS 信号是从距地面20 000 km 的卫星发送到地面,其L 1频段(f L1 = 1 575. 42 MHz)自由空间衰减为:根据GPS 接口控制文档(interface cONt ro ldocument ,ICD)规定GPS 系统L 1频段C/ A 码信号强度的最小值为- 160 dBW,而GPS 系统设计该频段中C/ A 码信号发射的有效通量密度(effect ive isot ro pic radiated pow er,EIRP)为P=478. 63 W(26. 8 dBW)[4],若大气层衰减为2. 0dBW,那么GPS 系统L 1 频段C/ A 码信号到达地面的强度为:。
高精度GPS定位算法改进与实现

高精度GPS定位算法改进与实现GPS(全球定位系统)是一种通过接收来自卫星的信号进行定位的技术。
在现代社会,GPS定位广泛应用于导航、地图、交通监控等领域。
然而,由于各种因素的影响,GPS定位存在一定的误差。
为了提高GPS定位系统的精度和准确性,许多研究人员持续努力改进GPS定位算法,并且取得了显著的成果。
在本文中,我们将介绍几种常见的高精度GPS定位算法的改进方法以及实现的步骤。
首先,差分GPS(Differential GPS)是一种用于提高GPS定位精度的常见技术。
差分GPS利用基准站的精确位置信息与接收机测量值之间的差异来纠正GPS接收机的误差。
基准站通过对GPS信号进行精确测量,并将测量结果与接收机的测量结果进行比较,计算得出差异值,然后传输给接收机进行误差校正。
这种方法可以显著提高GPS定位的精度,并广泛应用于实时定位和导航系统中。
其次,多路径效应是GPS定位中常见的一个误差源。
多路径效应是由于GPS信号在传播过程中经过建筑物、地形等物体的反射而产生的。
为了解决多路径效应带来的精度损失问题,研究人员提出了许多方法。
比如,使用信号处理技术对多路径反射信号进行滤波处理,排除错误的测量结果;利用反射信号与直射信号之间的差异,通过建立模型进行误差估计和校正。
这些方法旨在减少多路径反射对GPS定位的影响,提高定位精度。
另外,时钟偏移和卫星轨道误差也是影响GPS定位精度的重要因素。
为了解决这些问题,研究人员提出了时钟同步技术和卫星轨道校正方法。
时钟同步技术通过比较接收机和卫星之间的时间差异来补偿时钟偏移。
卫星轨道校正方法则通过对卫星运动模型的建立和卫星运行轨迹的测量来校正卫星轨道误差。
这些方法可以有效减少时钟偏移和轨道误差对GPS定位的影响,提高定位精度。
此外,还有一些增强GPS定位精度的方法可以应用于特定的环境和应用场景。
比如,使用地面站网络对GPS信号进行监测和校正,通过多站组合技术提高定位精度;利用惯性测量单元(IMU)与GPS定位技术相结合,实现高精度的惯性导航;利用卫星接收机的测距和测速能力,实现高动态条件下的高精度定位等。
高灵敏度GPS接收技术中几个关键问题的研究的开题报告

高灵敏度GPS接收技术中几个关键问题的研究的开题报告
一、研究背景
随着现代社会信息化的快速发展,定位、导航、遥感等技术应用越来越广泛,高灵敏度GPS接收技术的重要性也越来越突显。
本研究旨在探讨高灵敏度GPS接收技术中几个关键问题的研究,以期提高GPS接收器的信号接收能力,提高定位精度和鲁棒性。
二、研究内容
1. GPS信号检测技术研究
GPS信号弱,对于接收机的灵敏度要求较高。
本研究将探讨GPS信号检测技术,如何有效地利用现有的GPS信号弱信号特性,提高接收机的灵敏度,包括利用方差估计、相关性估计等方法。
2. GPS信号跟踪技术研究
高灵敏度GPS接收技术中另一个关键问题是GPS信号跟踪。
跟踪算法的性能直
接影响GPS接收器的定位精度和鲁棒性。
本研究将研究GPS信号跟踪技术,包括常用的PLL跟踪算法、卡尔曼滤波跟踪算法以及基于神经网络的跟踪算法等。
3. 多路径干扰抑制技术研究
GPS信号的多路径传播干扰是影响GPS接收器定位精度和鲁棒性的主要因素之一。
本研究将探讨多路径干扰抑制技术,如何有效地抑制多路径干扰,包括正交码、
空间滤波等方法。
三、研究意义
本研究将对高灵敏度GPS接收技术的研究做出一定的贡献,不仅可以提高GPS
接收器的信号接收能力和定位精度,还可以提高GPS接收器的抗干扰能力和鲁棒性,
从而更好地为现代社会的定位、导航、遥感等应用服务。
高灵敏导航接收技术论文(大作业)

高灵敏GNSS接收技术研究(大作业)论文摘要近年来,卫星定位导航技术在民用领域的应用越来越受到人们的关注。
民用领域的应用主要有:1)城市环境下导航定位需求;2)车载导航仪、手机等便携式移动终端的导航定位需求;3)峡谷森林环境下的应用等。
这些应用环境的显著特征是信号比较徼弱,信号强度比空旷地带要低10,-,20 dB,有时甚至会有30 dB的衰减,并且存在多径和干扰。
在这些微弱信号环境下,接收机必须提高弱信号处理能力才能正常工作。
因而高灵敏度GNSS接收技术成为导航技术研究的热点之一。
本文就以下几个方面做一些分析:(1)分析了BPSK调制的扩频码自相关特性、互相关特性以及理想情况下相关器的工作原理。
分析了晶振误差统计量,并给出了模拟晶振频率误差序列的方法,介绍了接收机的一些其他误差源。
(2)针对弱信号频率估计问题,分析了时域差分、频域FFT以及频偏分割&能量比较的频率估计方法,比较了它们的性能。
介绍了三种比特同步的方法并比较了它们的性能。
(3)分析了导航电文的特点,提出了基于比特预测、载波辅助码环的高灵敏度跟踪方案。
当电文可预测时,载波和扩频码同时跟踪;当电文不可预测时,载波保持,扩频码跟踪。
关键词:高灵敏度 GNSS 频率精捕获比特同步弱信号跟踪。
第一章:绪论本章主要介绍了GNSS系统的发展历史以及未来的发展趋势;阐述了课题研究的背景和目标;分析概括了国内外关于高灵敏度GNSS接收技术的研究现状。
1.1 GNSS系统的介绍(一)无线电导航的基本原理1)基于距离测量的定位方法:在速度已知的情况下距离和时间是成比例的,因此这种方法有时也称为基于时间到达测量法(TOA,Tune of Arrive),这样的系统称为TOA系统。
以2D定位为例,如果观测者知道到信号发射站S1的距离,并且知道S1的具体地理位置,那么观测者必然在一个以S1为圆心的圆上。
如果再知道S2的地理位置和距观测者的距离,那么观测者位置的不确定性缩小到两个点。
手机GPS接收灵敏度
手机GPS接收灵敏度上层楼厘清讯号干扰为治本之道新通讯2008年11月号93期文.赖盈霖在九十二期专栏中已针对全球卫星定位系统(GPS)接收机和手机芯片整合模式进行完整介绍,同时亦剖析模拟和数字基频接口的设计考虑;本期专栏将继续探讨GPS与手机芯片整合时,手机电路对GPS接收机的干扰问题。
手机系统对GPS干扰问题重重GPS接收机和手机整合最容易面临的问题便是来自手机和主板的干扰会导致GPS接收机灵敏度(Sensitivity)降低、值降低以及造成卫星误判(False Alarm)。
一般说来,手机系统对GPS的干扰可以分类为外频(Out-of-band)和同频(In-band)干扰。
图1所示为干扰源的树形图。
图1GPS接收机干扰源树形图手机射频为GPS外频干扰元凶外频干扰主要是成因为手机发射机所发射的高功率载波。
一般手机的发射功率在全球行动通讯(GSM)频段最高发射功率可达33dBm,在DCS频段最高发射功率亦可达30dBm;就平均发射功率而言,手机的发射功率通常在20dBm 以上。
相较之下,卫星讯号抵达GPS接收机天线的功率在户外约为-130dBm,而在室内则降低到-150dBm左右。
虽然手机所发射的高功率载波落在GPS的外频,但这两种讯号的功率位准相差甚大(可达150~180dBm),再加上低噪声放大器(LNA)本身是一种宽带的组件,因此会对第一级低噪声放大器产生非线性效应。
此一非线性效应会在GPS接收机内产生讯号饱合(Saturation)、压缩(Compression)和互调变(Inter-modulation),进而导致GPS接收机值的降低,甚至产生同频的干扰讯号。
GPS的操作频率为1,575.42MHz,因此当手机操作在DCS频段时会对GPS接收机的值造成最大的影响。
理论上,当手机操作在DCS频段的最低频道(ARFCN为512,=1,710.2MHz)且发射功率亦为最大时(30dBm),会对GPS接收机的值造成最大的负面冲击。
高敏度GPS接收机的研究
标志 。导航卫 星星座布 满后 ,在 海上 、航 空等各种 军工和 民用行 业 中都开 始使用其 导航 、定 位等 。但
目前仍然存在很多问题 ,需要进一步改善。 G S信号在室内环境下严重衰减[ P 2 1 .还受多种其
他因素干扰 ,并且 紧急情况大多发生在室 内环境 中。
因此 ,在室 内环境 中有很多重要 的 G S应用需求 。 P 1 高敏度 GP _ 2 S的需求 研究发现 。高敏度 G S接收技术正好 能满足室 P 内环境 要求 的定位 ,同时 ,随着该技 术 的发展 ,高 敏度 G S P 接收机已经成为 了当今 的研究热点。 在 室 内环境 中 ,G S 收机捕 获信 号 、处 理 比 P 接
Ab ta t s r c :GPS h sb e p l d t d a g ,e p cal h ih- e stvt a e n a p i o a wie r n e s e il t e h g s n i i GPS r c ie e h oo y h sb e e y i y e ev rtc n lg a e n
Ke wod : S CA c d ; a tr g takn y rs GP ; / o e cpui ;rc ig n
卜
第2卷 7
第5 期
Vo . No5 1 27 .
GPS软件接收机中的一种实用高灵敏度快速捕获算法
GPS软件接收机中的一种实用高灵敏度快速捕获算法覃新贤;韩承德;谢应科【期刊名称】《电子学报》【年(卷),期】2010(038)001【摘要】C/A码的捕获,在软件GPS接收机中的地位举足轻重.通常软件GPS接收机中没有专门用于相关运算的硬件部件,提高软件GPS接收机的捕获灵敏度的同时降低捕获的运算量,是软件接收机实用化的关键.利用先叠加再相关的方法,可以减少相关运算的次数,但必须考虑载波误差对相关函数峰值的影响.在此基础上,研究了数据预处理中,线性插值的参数选择问题,最后,提出了最佳路径算法,进行进一步的相关累积,在延长相干累积时间长度的同时,避免导航数据跳变对累积的影响,提高捕获的灵敏度.仿真结果表明,在信噪比SNR=-37dB的情况下,算法仍能捕获到所有卫星信号.实际接收的数据也表明,算法能明显增加捕获到的卫星数量.由于算法采用了多种措施来降低运算量,因此算法的运算量适中,非常适合在软件接收机中采用.【总页数】6页(P99-104)【作者】覃新贤;韩承德;谢应科【作者单位】中国科学院计算技术研究所,北京,100080;广西大学计算机与电子信息学院,广西南宁,530001;中国科学院研究生院,北京,100049;中国科学院计算技术研究所,北京,100080;中国科学院计算技术研究所,北京,100080【正文语种】中文【中图分类】TN967.1【相关文献】1.一种GPS软件接收机信号快速捕获算法研究 [J], 李亚峰;王新龙;纪新春2.高灵敏度GPS软件接收机捕获算法 [J], 魏玲玲;范胜林;王顺亮;刘建业3.一种高灵敏度GPS信号快速捕获算法 [J], 罗大成;刘岩;刘志国;胡来红;郭峰4.基于简易差分相干积累的高灵敏度GPS软件接收机捕获算法 [J], 唐斌;董绪荣5.一种GPS软件接收机自适应门限快速捕获算法 [J], 巴晓辉;李金海;陈杰因版权原因,仅展示原文概要,查看原文内容请购买。
高动态环境的GPS信号接收及其算法研究

26
电光与控制 第 13 卷
的“复包络”; De 为伪码延时 ;ωI 和ωd 分别为中频角 频率和载波多普勒角频率 ; A 为接收信号的振幅 ;随 机相位为θ=θ0 +π·D ( t - De) ,θ0 为接收信号的初 始相位 ;π·D ( t - De) 是由于数据码调制而产生的 相位随时间变化部分 。
为了能够顺利跟踪高动态环境中的 GPS 信号 , 人们开始研制高动态 GPS 接收机 。本文将以参数 估计方法为基础 ,对一种适用于高动态环境的 GPS 接收机方案进行设计 。然后比较分析几种参数估计 算法 ,并对它们在高动态 GPS 接收机中的应用进行 了探讨研究 。
1 高动态 GPS 接收机的设计
0 前言
GPS 系统以其全球性 、全天候和实时定位等优 点显示出强大的生命力和竞争力 ,在陆地 、海洋 、航 空和航天等领域有着广泛的应用 ,获得了极大的经 济效益和社会效益 。GPS 在高动态环境中的应用尤 其是在军事领域中的应用更为重要 ,如导弹制导 、弹
收稿日期 :2005206213 修定日期 :2005206224 基金项目 :国家自然科学基金资助 (F010103) 。 作者简介 :吕艳梅 (19772) ,女 ,重庆市人 ,博士生 ,主要从事
GPS 接收机的主要功能是接收 、变换和检 测 GPS 信号 ,通过分析卫星电文及对相关数据进行处 理而获得所需的观测量 ,并且完成应用系统所要求 的其它功能 。
与普通的 GPS 接收机类似 ,本文设计的高动态 GPS 接收机的组成包括 4 个功能模块 :带通滤波器 模块 、射频前端模块 、信号处理模块以及应用处理模 块 ,如图 1 所示 。
1) 最大似然估计算法 (MLE)
信号参数的最大似然估计结果是那些同时使得
GPS接收机灵敏度
1 GPS接收机的灵敏度定义随着GPS应用范围的不断扩展,对GPS接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS的使用范围。
作为GPS接收机最为重要的性能指标之一,高灵敏度一直是各个GPS接收模块孜孜以求的目标。
对于GPS接收系统而言,灵敏度指标包括多个场景下的指标,分别为:跟踪灵敏度、冷启动灵敏度、温启动灵敏度。
目前业界已经可以实现跟踪灵敏度在-160dBm以下,冷启动灵敏度和温启动灵敏度也分别可以达到-145dBm和-158dBm以下,其中冷启动灵敏度和温启动灵敏度分别表示的是在两种不同场景下的捕获灵敏度。
GPS接收机首先需要完成对卫星信号的捕捉,完成捕捉所需要的最低信号强度为捕捉灵敏度;在捕捉之后能够维持对卫星信号跟踪所需要的最低信号强度为跟踪灵敏度。
2 GPS接收模块的灵敏度性能分析从系统级的观点来看,GPS接收机的灵敏度主要由两个方面决定:一是接收机前端整个信号通路的增益及噪声性能,二是基带部分的算法性能。
其中,接收机前端决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕捉、跟踪过程所能容忍的最小信噪比。
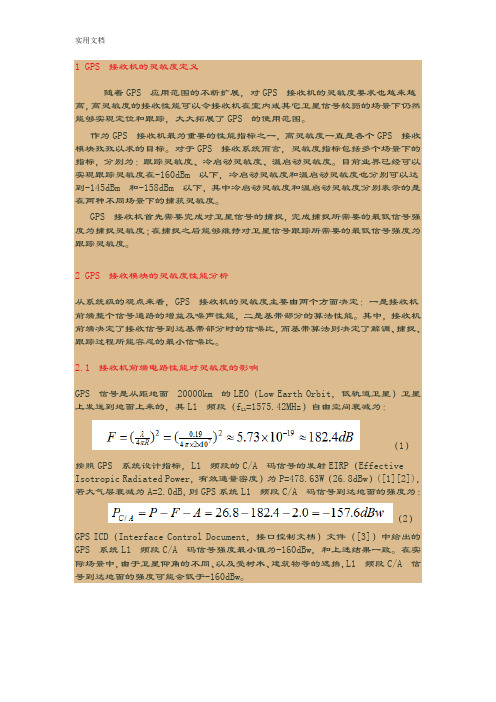
2.1接收机前端电路性能对灵敏度的影响GPS信号是从距地面20000km的LEO(Low Earth Orbit,低轨道卫星)卫星=1575.42MHz)自由空间衰减为:上发送到地面上来的,其L1频段(fL1(1)按照GPS系统设计指标,L1频段的C/A码信号的发射EIRP(Effective Isotropic Radiated Power,有效通量密度)为P=478.63W(26.8dBw)([1][2]),若大气层衰减为A=2.0dB,则GPS系统L1频段C/A码信号到达地面的强度为:(2)GPS ICD(Interface Control Document,接口控制文档)文件([3])中给出的GPS系统L1频段C/A码信号强度最小值为-160dBw,和上述结果一致。
高灵敏度GPS信号快速捕获新方法
高灵敏度GPS信号快速捕获新方法
杨久东;王文军;孙跃
【期刊名称】《电光与控制》
【年(卷),期】2018(025)006
【摘要】研究了弱信号条件下GPS软件接收机的C/A码的快速捕获问题.提出了一种高灵敏度快速捕获新算法,该方法首先采用平均相关技术降低C/A码的自相关损耗,基于载频误差补偿技术减小C/A码累积误差;然后利用叠加相关方法降低相干累积运算的复杂度,通过循环移位减小频率步进搜索的时间消耗.实验结果表明,该算法能够实现微弱GPS信号捕获,且运算量适中,捕获概率较高.
【总页数】5页(P56-59,71)
【作者】杨久东;王文军;孙跃
【作者单位】华北理工大学矿业工程学院,河北唐山063210;华北理工大学矿业工程学院,河北唐山063210;华北理工大学矿业工程学院,河北唐山063210
【正文语种】中文
【中图分类】TN967.1
【相关文献】
1.两种捕获高灵敏度高动态GPS信号的方法 [J], 田嘉;王伟;史平彦
2.一种高灵敏度GPS信号快速捕获算法 [J], 罗大成;刘岩;刘志国;胡来红;郭峰
3.一种新的高灵敏度GPS信号捕获方法 [J], 莫建文;欧阳缮;孙希延;蔡成林
4.基于小波处理的高灵敏度GPS信号捕获方法 [J], 李燕敏;易清明;石敏
5.基于随机共振的高灵敏度GPS信号捕获算法 [J], 莫建文;欧阳缮;肖海林;孙希延
因版权原因,仅展示原文概要,查看原文内容请购买。
高灵敏度GPS接收机中的互相关减轻算法研究
用于GPS接收机的快速自适应干扰抑制方法
用于GPS接收机的快速自适应干扰抑制方法王纯;张林让;陈广锋;黄庆东;刘高高【摘要】The adaptive Generalized Sidelobe Canceller(GSC) always employs the least-mean-square(LMS) algorithm for weight adaptation. In the GPS receiver, real adaptive interference suppression can not be satisfied by this algorithm because of its slow convergence rate, especially at the very low signal-to-noise ratio(SNR). Since the convergence behavior of the LMS algorithm is highly dependent on the eigenvalue spreads of the covariance matrix of the blocking matrix output, we present a novel Householder-based fast adaptive interference suppression approach. Householder transformation can be employed for the design of the blocking matrix of the GSC, which will block not only the desired signal but also accelerate the convergence rate of the LMS algorithm. Therefore, it can also maximize the output SINR and significantly improve the performance of the anti-jammer GPS receiver. Theoretical analysis and simulation results demonstrate the superiority of the proposed structure.%提出了一种基于Householder变换的快速自适应干扰抑制方法.利用Householder变换构建的广义旁瓣相消器下支路阻塞矩阵,可将期望信号完全阻塞,提高了最小均方误差算法的收敛性,获得了较高的输出信干噪比,并提高了GPS接收机的快速抗干扰性能.理论分析和性能仿真验证了该方法的优越性.【期刊名称】《西安电子科技大学学报(自然科学版)》【年(卷),期】2011(038)003【总页数】7页(P114-120)【关键词】GPS接收机;Householder变换;广义旁瓣相消;最小均方误差算法【作者】王纯;张林让;陈广锋;黄庆东;刘高高【作者单位】西安电子科技大学雷达信号处理国家重点实验室,陕西西安,710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安,710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安,710071;西安文理学院数学系,陕西西安,710065;西安电子科技大学雷达信号处理国家重点实验室,陕西西安,710071;西安邮电学院通信工程系,陕西西安,710121;西安电子科技大学雷达信号处理国家重点实验室,陕西西安,710071【正文语种】中文【中图分类】N965;TN911.7自适应阵列天线是新一代GPS抗干扰接收机的重要组成部分.在GPS抗干扰接收机中,自适应阵列首先要求消除接收信号中的干扰和噪声的影响,获得最大输出信干噪比;其次要求正确恢复出期望信号的复值和相位,实现有效测距和定位;最后GPS 接收机要求具备快速收敛的自适应抗干扰能力.常用于GPS接收机的自适应阵列,包括线性约束最小方差(LCMV)和广义旁瓣相消器(GSC)两种形式.在GSC框架中,阻塞矩阵的构建至关重要.常见的阻塞矩阵的构建方法有二项式对消[1]和奇异值(SVD)分解[2]等.文献[3]提出了阻塞矩阵对于自适应权矢量误差敏感性的影响及阻塞矩阵选取的要求:首先要求阻塞矩阵能够将期望信号完全阻塞,且没有剩余;其次需尽可能获得最大输出信干噪比.在GSC框架中,另外一项重要的组成即自适应滤波.由于它和线性约束是分开进行的,因此可以采用连续自适应处理算法来递推GSC框架中的自适应滤波权矢量.连续处理是对每个快拍数据进行权矢量的更新和应用,因此非常适用于非平稳环境.传统的连续自适应处理算法通常采用LMS算法.LMS算法简单,但收敛速度慢,误差较大,通常无法满足GPS接收机对自适应干扰抑制实时性方面的要求[4].LMS算法与阻塞后信号协方差矩阵的特征值的离散程度有关[5-6],特征值离散程度越小,LMS算法的收敛性就越好,因此可以构建特征值离散程度较小的阻塞矩阵,从而提高GSC框架下的连续LMS算法的收敛性能.二项式对消方法简单,但其信号协方差矩阵特征值离散程度越大,对LMS算法的收敛性影响也越大.而基于奇异值(SVD)分解方法的阻塞矩阵,其信号协方差矩阵离散程度较小,但其算法复杂度较高.文献[7]提出了一种最小模级联相消器,是一种在采样协方差求逆类算法所需一半的样本数的情况下就可取得同样收敛性能的算法.文献[8]针对GPS接收机,提出了基于Householder变换构建的多级维纳滤波器,用于降低空时二维自适应波束形成的计算复杂度.为此,笔者提出一种用于GPS接收机的快速自适应干扰抑制方法.利用Householder变换阻塞矩阵其信号协方差矩阵离散程度较小这一特点,不仅可以实现期望信号被完全阻塞,而且可以提高GSC框架下的连续LMS算法的收敛性,获得较高的输出信干噪比,从而提高了GPS接收机的快速抗干扰性能.理论分析和性能仿真验证了该方法的优越性.设均匀线阵由M个阵元组成.接收到的信号在奈奎斯特采样速率下进行采样,在时刻k各个天线采样得到样本,构成矢量, 表示为其中,a(θ)和a(θj)表示信号和干扰源的导向矢量,θ和θj是它们各自的波达方向;s(k)是期望卫星的信号;rj(k)是第j个干扰信号;Pj是第j个干扰信号rj(k)的幅度;n(k)是加性高斯白噪声,这里采用等距线阵,阵元间距半波长,导向矢量为,其中,d是阵元间隔;λ是期望卫星中心频率对应的波长.自适应抗干扰处理器输出为输出的信号(n)最后被GPS接收机进行处理.2.1GSC结构在GSC结构中,阵列接收信号经GSC上支路的静态权矢量,保留了期望信号、干扰和噪声,且期望信号无失真响应约束得到保证,各干扰分量的复幅度变化为各干扰和期望信号的空间相关系数;阵列接收信号经GSC下支路,首先将期望信号阻塞,只剩余干扰和噪声,再通过连续LMS算法自适应更新权矢量,使得上下支路的差值最小.显然,对GSC而言,其阻塞矩阵的构建和干扰消除自适应权系数的计算是最为重要的. 如图1所示,输入信号x(k)通过GSC上支路静态权矢量qH,获得期望信号其中,q∈C(M×1).此外,下支路首先通过阻塞矩阵,将期望信号阻塞掉.经(M-1)×M维阻塞矩阵QB后输出信号矢量为此时,下支路阻塞后的信号中仅包含干扰和噪声.将上支路输出与下支路阻塞矩阵输出结果作互相关,即下支路阻塞矩阵输出信号X0(k)的协方差矩阵为其中,Rx是阵列接收信号x(k)的M×M维采样协方差矩阵.由于下支路经过阻塞矩阵进行自适应滤波与上支路的输出中干扰信号是相关的,因而可将上下支路相关干扰和噪声相互抵消,输出无失真的期望信号.无约束最优化代价函数为对代价函数wGSC求导,得到下支路动态权矢量为那么,广义旁瓣相消的自适应权矢量为要求阻塞矩阵满足2.2 阻塞矩阵的构建阻塞矩阵的构造在广义旁瓣相消中至关重要.如果阻塞矩阵构建的不合适,则在经过阻塞矩阵后,会出现期望信号的阻塞剩余.常见的阻塞矩阵构建方法有二项式对消器和奇异值(SVD)分解等.下支路阻塞矩阵输出信号的协方差矩阵为其中,为噪声功率;Rj为干扰的协方差矩阵.可以看出,阻塞矩阵输出仅包括干扰和噪声.传统的基于二项式对消器的数据阻塞矩阵利用均匀等距线(ULA)阵各阵元之间存在均匀相位差这一性质,利用该阻塞矩阵同样有.对阻塞矩阵作自相关,阻塞矩阵的列与列之间不正交,从式(10) 可以看出,阻塞输出噪声在阵元间产生相关性,因此可以将阻塞矩阵输出的噪声看作是非高斯白噪声此外,另一种构建方式是奇异值分解(SVD),该阻塞矩阵的列与列之间正交,即,但由于其庞大的运算量在实际中通常无法采用[9]. 选用Householder矩阵能使向量a(θ)的某些元素变为零,又能保持该向量的长度或范数不变.具体地说,Householder矩阵Q可以将非零向量a(θ0)变换成e1的倍,其中,,为M×1维单位矩阵,将Householder矩阵写作这是因为Householder变换使得,可以达到的目的.构造Householder向量为则对称和正交的Householder矩阵为文中算法取后M-1×M维的矩阵元素QB作为阻塞矩阵.经过基于Householder 阻塞矩阵QBa(θ0)=0,期望信号方向的信号被完全阻塞.阻塞矩阵的自相关矩阵为单位阵,即.阻塞矩阵的列与列之间正交.可以看出,阻塞矩阵输出噪声是功率为、空间不相关的白噪声.基于Householder变换的阻塞矩阵使得LMS算法避免了由于二项式对消给自适应GSC带来的不相关噪声的影响.从计算复杂度考虑,该阻塞矩阵构建仅需次乘法,低于基于SVD的阻塞矩阵的运算复杂度.2.3 低复杂度自适应更新权矢量LMS算法是一种闭环算法,即在权矢量的更新中存在输出的反馈.考察GSC输出的均方误差为对WGSC取导得由权矢量求,使得MSE下降最快,则其中,μ为步长因子,用于控制收敛速度;可采用瞬时梯度估计代替:将式(17)带入式(16),得其中,LMS算法在稳态的情况下其均方根误差(MSE)可以定义为[10]其中,是维纳解的最小均方根误差(MMSE),是由于LMS算法引起的剩余的MSE.权误差矢量可以定义为那么,,其中是权矢量引起的误差信号.权误差矢量的自相关矩阵定义为有.在这个假设下,剩余MSE可写为,其中tr[]是[]内矩阵的迹.当k→∞时,剩余的MSE即其中,定义为的第l个特征值(共N-1个特征值).由于(N-1)λmin≤式(23)可以写作可以看出,LMS算法的收敛程度与特征值的离散程度有关,离散程度越小,收敛性越好.已知,,特征值离散程度满足不等式:其中,λJ是干扰协方差矩阵的特征值总和.当,离散程度最小,收敛性能最优;否则,,离散程度较大,收敛性能较差.也就是说,当阻塞矩阵输出噪声为色噪声时,LMS算法收敛得很慢.LMS算法要求阻塞矩阵的选取需要满足的条件,使得收敛速度得以提高,抗干扰性能较好.为了验证该算法的有效性,主要考察输出SINR和自适应干扰抑制这两个方面的性能.仿真中,采用间距为半波长的8阵元均匀线阵.接收机时域采样频率采用奈奎斯特采样频率.信噪比为-20dB,假设卫星位于θ=30°.1个点频干扰位于-60°,两个不相关的等功率调频干扰源位于-15°和60°,一个宽带干扰源位于0°.假定发射信号的中心频率为1.25MHz,采样频率为5MHz.信噪比(SNR)为-20dB、信干比(SIR)为-45dB,阵元间距d=λ/2,λ是接收信号载波频率对应的波长.将文中提出的基于Householder变换的干扰抑制方法,在GSC框架下分别结合LMS算法和Kalman滤波进行自适应更新权矢量,当SNR为-20dB和SIR为-45dB时,波束形成输出如图2所示.LMS算法满足μ<2×10-7,取μ=1×10-7.均匀线阵中的第1支路接收到的信号的频谱图如图2(a)所示.分别采用GSC框架下两种阻塞矩阵在迭代次数N=80时的阵列输出信号的频谱结果如图2(b)和图2(c)所示.对比可以看出,基于二项对消的LMS算法的输出仍有少量干扰没有完全抑制;而采用相同迭代次数的条件下,文中提出的方法可以将各种干扰完全抑制,说明采用Householder变换的连续LMS自适应干扰抑制算法收敛速度较快.干扰抑制前后的归一化互相关结果如图3所示.干扰抑制前无法进行本地码和接收码的相关操作,从而导致接收机失锁,不能正常工作.而接收机采用文中提出的干扰抑制方法,其相关器可有效实现C/A码捕获.当SNR为-20dB和SIR为-45dB时,通过200次蒙特卡罗仿真实验,比较了GSC框架下基于两种阻塞矩阵的自适应抗干扰方法,它们的输出信干噪比随快拍数的变化曲线如图4所示.可以看出,LMS算法受Householder阻塞矩阵的影响较大,其输出信干噪比(SINR)明显优于传统的二项对消阻塞矩阵的输出信干噪比.此外,阵列接收的GPS信号的信噪比较低,通常取-20dB~-40dB.在低信噪比条件下,比较了它们的输出信干噪比随SNR的变化曲线如图5所示.基于Householder阻塞矩阵的自适应干扰抑制方法的输出信干噪比,明显优于传统的二项式相消阻塞矩阵方法的输出信干噪比,与基于EVD的方法性能接近,但计算复杂度大大降低了.考虑到GSC-LMS算法收敛速度较慢,无法满足GPS接收机对自适应干扰抑制的实时性方面的要求.由于LMS算法的收敛性受GSC框架中阻塞矩阵的影响显著,笔者利用Householder变换构建了GSC下支路阻塞矩阵.该算法不仅可以将期望信号完全阻塞,而且可以提高LMS算法的收敛性,从而获得较高的输出信干噪比.通过理论分析和性能仿真,验证了该算法在提高输出信干噪比和用于GPS接收机快速抗干扰方面的优越性.【相关文献】[1]王永良,丁前军,李荣锋.自适应阵列处理[M].北京:清华大学出版社,2009:45-46. [2 ] Ueng F B, Yu S J.A New GSC-Based Adaptive Array [C ]//Wireless Communications and Applied Computational Electromagnetic.Honoluu:IEEE,2005:997-1000.[3] Yu S J,Lee J H.Effect of Random Weight Errors on the Performance of PartiallyAdaptive Array Beamformers[J].Signal Processing,1994,37(3):365-380.[4] Hou Youguo,Guo Wei,Li Xinshan.A GPS Receiver of Adaptive Interference Suppression [C ]//International Conference on Communications,Circuits and Systems.California:IEEE,2009:450-453.[5] Chu Yi,Fang W H.A Novel Wavelet-Based Generalized Sidelobe Canceller [J].IEEE Trans on Antennas and Propagation,1999,47(9):1485-1494.[6] Zhang Xianda,Wei Wei.Blind Adaptive Multiuser Detection Based on Kalman Filtering[J].IEEE Trans on Signal Processing,2002,50(1):87-95.[7]黄庆东,张林让,卢光跃. 一种最小模级联相消器[J]. 西安电子科技大学学报,2010,37(2):204-209. Huang Qingdong,Zhang Linrang,Lu Guangyao.Minimum Module Value Cascaded Canceller[J].Journal of Xidian University,2010,37(2):204-209. [8] Werner S,With M,Koivunen V.Householder Multistage Wiener Filter for Space-time Navigation Receivers [J].IEEE Trans on Aerospace and Electronic Systems,2007,43(3):975-988.[9] Lee Yinman,Wu Wenrong.A Robust Adaptive Generalized Sidelobe Canceller with Decision Feedback [J].IEEE Trans on Antennas and Propagation,2005,53(11):3822-3832.[10]Koh C L.Broadband Adaptive Beamforming with Low Complexity and Frequency Invariant Response[D].Southampton:Univ of Southampton,2009.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词 : 通信技术 ; 互相关减轻 ; 仿真 ; 码分多址 ; 高灵敏度 ; GPS 接收机 中图分类号 : V557 文献标识码 : A 文章编号 : 037222112 (2008) 0621098205
Study o n GPS Cro ss Correlatio n Mitigatio n Technique s in High Sensitivity GPS Receivers
LIANG Kun1 ,WANG Jian2 ,SHI Hu2li3
(1. Institute of Metrology , Beijing 100013 , China ; 2. School of Electronics and Information Engineering , Beijing Jiaotong University , Beijing 100044 , China ; 3. National Astronomical Observatories , Chinese Academy of Sciences , Beijing 100012 , China)
200第8 年6 期6 月
电 子 学 报 ACTA ELECTRONICA SINICA
Vol . 36 No. June 2008
6
高灵敏度 GPS 接收机中的互相关减轻算(1. 中国计量科学研究院 ,北京 100013 ; 2. 北京交通大学电子信息工程学院 ,北京 100044 ; 31 中国科学院国家天文台 ,北京 100012)
Abstract : In terms of the theoretical analysis ,the cross correlation computation formula based on frequency difference coeffi2 cient was deduced ,and two new cross correlation mitigation methods ,called the parallel cross correlation subtraction and the parallel cross correlation subtraction based on frequency difference coefficient were addressed. By the tests in which one to three strong in2 terference signals with the intensity of 16 to 30dB were simulated ,the effects of the two cross correlation mitigation methods in high sensitivity GPS receivers were good and the practicality of them was higher. The parallel cross correlation subtraction method based on frequency difference coefficient had much advantage on computation quantity , and was able to accelerate the signal acquiring speed of high sensitivity receivers and make the receivers work well when receiving signals with much weaker intensity and lower signal noise ratio.
1 引言
GPS 调制/ 解调的概念是以不同的卫星使用不同的 伪随机噪声 ( PRN) 码 ,但有相同的基码速率和载频为基 础的 ,这种调制技术被称为码分多址 ( CDMA) . 为了使 CDMA 鉴别技术生效 ,必须在所有使用的 PRN 码之间获 得一定水平的互相关信号拒绝性能. 由于 GPS P ( Y) 码 的码长为 611871 ×1012 个基码 , GPS P( Y) 码与任何其他 GPS P( Y) 码的互相关电平相对于最大自相关而言接近
摘 要 : 通过理论分析 ,推导出了基于频差因子的互相关计算公式 ,提出了两种新的互相关减轻算法 ———并行 互相关减去法和基于频差因子的并行互相关减去法. 通过仿真实验 ,在一定多普勒频差下 ,1 到 3 个干扰强信号 、强度 强于弱信号 16dB 到 30dB 时 ,两种方法对高灵敏度 GPS 接收机中互相关影响的减轻都有良好的效果和更强的实用性 ; 基于频差的并行互相关减去法在计算量方面优势更大 ,可以加快高灵敏度 GPS 接收机的捕获速度 ,使其在接收强度较 弱 、信噪比很低的 GPS 信号时能正常工作.
于 - 127dB[1] . 因此 ,任何 GPS 卫星的 P ( Y) 码与其他任 何 GPS 卫星的 P ( Y) 码在任何相位移都可作不相关对 待. 但 GPS C/ A 码则不然 ,其码长为 1023 基码 ,在任何 两个码之间有 0 多普勒频差的条件下 ,C/ A 码的互相关 函数其峰值电平相对于最大自相关来说可以差到只有 - 24dB. 在最坏情况下 ,有 1kHz 的频差时 ,互相关电平 可差到 - 21dB ,在一定的天线增益及其他一些条件 ( 如 需要信号较不要信号强度弱得多 、仰角低得多及多径效 应等) 下 ,这有可能造成假捕获[2] .