STM32,DMA采集一个AD数据,并通过DMA向串口发送
STM32CubeMx——串口使用DMA收发数据

STM32CubeMx——串⼝使⽤DMA收发数据⽤到的是DMA发送数据,DMA接收,在中断回调⾥发送出去。
⼀.代码⽣成1.按以前的⽅法设置好时钟和调试⽅式,这⾥就不多说了。
2.设置串⼝1。
3.在DMA Setting⾥点击Add添加USART1_TX,Mode有两种模式,⼀种是普通模式,使⽤⼀次发送语句就发⼀次,另⼀种是循环模式,使⽤⼀次发送会⼀直发送。
这⾥发送我选择普通模式,接收选择循环模式。
4.在中断设置⾥打开串⼝1的中断。
5.时钟和⽂件路径等设置好,然后点⽣成代码。
⼆.代码编写1.先定义发送和接收的数组。
/* USER CODE BEGIN 0 */uint8_t aRxBuffer[1];uint8_t aTxBuffer[]="ok";/* USER CODE END 0 */2.打开串⼝DMA的发送使能,while循环可以放⼀些LED的闪烁。
/* USER CODE BEGIN 2 */HAL_UART_Receive_DMA(&huart1,aRxBuffer,1);HAL_UART_Transmit_DMA(&huart1,aTxBuffer,sizeof(aTxBuffer));/* USER CODE END 2 */3.最后加上⼀个串⼝接收函数的回调函数,把接收到的数据再发出去。
/* USER CODE BEGIN 4 */void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle){HAL_UART_Transmit(&huart1,aRxBuffer,1,0);}/* USER CODE END 4 */现象:上电之后,电脑的串⼝会收到“OK”,然后从电脑发送给芯⽚任意字符,芯⽚再发回来。
总结:使⽤DMA做发送处理,接收数据后⽤串⼝发出去。
为什么接收到数据后不⽤HAL_UART_Transmit_DMA发送出去呢?使⽤这个发现丢包情况,因为这⾥只是测试DMA接收数据情况,接收到之后⼀般是作运算处理的,所以⽤⼀般串⼝发送验证接收的数据正确。
stm32f103 dma案例

STM32F103 DMA案例背景STM32F103是意法半导体(STMicroelectronics)推出的一款32位Cortex-M3内核的单片机,具有丰富的外设和强大的性能。
其中,DMA(Direct Memory Access)是STM32F103系列的一个重要特性,它能够实现外设和内存之间的数据传输,大大减轻了CPU的负担,提高了系统的性能。
本文将通过一个具体的案例来介绍STM32F103的DMA功能以及如何使用DMA进行数据传输。
案例描述在某个智能家居系统中,需要读取多个传感器的数据,并将数据通过串口发送给上位机进行处理和显示。
传感器的数据采集频率较高,而且需要实时传输,因此需要一种高效的方式来进行数据传输。
为了减轻CPU的负担,我们决定使用STM32F103的DMA功能来实现数据的传输。
硬件准备•STM32F103开发板•传感器模块•上位机串口调试工具软件准备•Keil MDK开发环境•STM32CubeMX配置工具案例过程步骤1:配置GPIO和串口首先,使用STM32CubeMX配置工具对STM32F103进行初始化配置。
打开STM32CubeMX,选择对应的芯片型号(例如STM32F103C8T6),然后进行以下配置:1.在”Pinout & Configuration”选项卡中,配置GPIO引脚。
将传感器模块的数据引脚连接到STM32F103的GPIO引脚,使其能够读取传感器数据。
2.在”Peripherals”选项卡中,配置串口。
选择一个可用的串口(例如USART1),配置波特率和其他参数,以便与上位机进行通信。
完成配置后,点击”Project”菜单,选择”Generate Code”生成代码。
然后将生成的代码导入到Keil MDK开发环境中。
步骤2:配置DMA传输在Keil MDK中打开生成的工程,找到对应的串口初始化代码。
在初始化代码中加入以下代码,配置DMA传输:// 定义DMA传输缓冲区#define BUFFER_SIZE 100uint8_t buffer[BUFFER_SIZE];// 配置DMA传输DMA_HandleTypeDef hdma_usart1_tx;hdma_usart1_tx.Instance = DMA1_Channel4;hdma_usart1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;hdma_usart1_tx.Init.PeriphInc = DMA_PINC_DISABLE;hdma_usart1_tx.Init.MemInc = DMA_MINC_ENABLE;hdma_usart1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;hdma_usart1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;hdma_usart1_tx.Init.Mode = DMA_NORMAL;hdma_usart1_tx.Init.Priority = DMA_PRIORITY_LOW;HAL_DMA_Init(&hdma_usart1_tx);// 关联DMA和串口__HAL_LINKDMA(huart, hdmatx, hdma_usart1_tx);以上代码中,首先定义了一个长度为100的缓冲区,用于存储传感器数据。
STM32多通道ADC采集详解(DMA模式和非DMA模式)

STM32多通道ADC采集详解(DMA模式和非DMA模式)在非DMA模式下,ADC采集的数据是通过CPU直接读取的,采集效率相对较低,但是编程相对简单。
首先,需要初始化ADC模块的工作模式(单通道、多通道等)和采样时间。
然后,使能ADC模块,并配置所需的通道和采样时间。
接着,设置采样序列,指定要采集的通道和相应的排列顺序。
在采集数据时,首先需要设置ADC转换模式和采样时间,然后开始转换,并等待转换完成。
转换完成后,通过读取ADC_DR寄存器可以获取转换结果。
如果需要采集多个通道的数据,可以通过设置ADCSQR中的SQx位来启动下一次转换。
在DMA模式下,ADC采集的数据是通过DMA控制器传输到指定的内存区域,采集效率较高,适合数据量较大的应用场景。
与非DMA模式相比,DMA模式下的配置需要额外设置DMA控制器的工作模式(单次传输、循环传输等)和传输数据的目的地地址。
在采集数据前,需要设置DMA传输的目的地地址,并使能DMA传输。
在开启ADC转换后,DMA控制器会根据设置的目的地地址来自动传输数据,无需CPU干预。
采集完成后,CPU可以通过检查DMA传输完成标志位来判断数据是否已传输完毕。
总结:
使用非DMA模式的ADC采集相对简单而容易上手,适用于数据量较小且对实时性要求不高的应用场景。
DMA模式下的ADC采集效率更高,适用于数据量较大且对实时性要求较高的应用场景。
无论是DMA模式还是非DMA模式,都需要根据具体的应用需求来选择合适的模式。
在使用DMA模式时,还需要注意合理设置DMA传输的目的地地址和传输模式,以充分发挥DMA的优势。
stm32DMA采集一个AD数据并通过DMA向串口发送

stm32DMA采集一个AD数据并通过DMA向串口发送#include#include\#include\#include\#include\#include\e某ternuint32_tSendBuff;floatADC_Received;uint32_tADC_Received1;uin t8_tADC_Received2[11];//printf函数重新定向,方便在程序中使用intfputc(intch,FILE 某f){USART_SendData(USART1,(unignedchar)ch);while(!(USART1->SR&USART_FLAG_T某E));return(ch);}voiduart_putchar(uint8_tch){USART_SendData(USART1,ch);while(USART_GetFlagStatu(USART1,USART_FLAG_T某E)==RESET);} intmain(){ADC1_Config();DMA_Config();USART1_Config();while(1 ){//ADC_Received=(float)ADC_GetConverionValue(ADC1)某3.3/4069;//ADC_Received1=ADC_Received某1000000000;ADC_Received=(float)SendBuff某3.3/4069;ADC_Received1=ADC_Received某1000000000;ADC_Received2[0]=(ADC_Received1/1000000000+0某30);//uart_putchar(0某2e);ADC_Received2[1]=(ADC_Received100000000/100000000+0某30);ADC_Received2[2]=(ADC_Received1000000000000000/10000000+0某30);ADC_Received2[3]=(ADC_Received1000000000000000000000/1000000 +0某30);ADC_Received2[4]=(ADC_Received100000000000000000000000000/10 0000+0某30);ADC_Received2[5]=(ADC_Received100000000000000000000000000000 0/10000+0某30);ADC_Received2[6]=(ADC_Received100000000000000000000000000000 0000/1000+0某30);ADC_Received2[7]=(ADC_Received100000000000000000000000000000 000000/100+0某30);ADC_Received2[8]=(ADC_Received100000000000000000000000000000 0000000/10+0某30);ADC_Received2[9]=(ADC_Received1+0某30);ADC_Received2[10]=0某0d;USART_DMACmd(USART1,USART_DMAReq_T 某,ENABLE);//delay_m(1000);//USART_DMACmd(USART1,USART_DMAReq_T某,DISABLE);//delay_m(1000);//ADC_Received=(float)SendBuff/4069某3.3;//ADC_Received=(u16)ADC1->DR;//ADC_Received=(float)ADC_Received/4069某3.3;//printf(\//while(!ADC_GetFlagStatu(ADC1,ADC_FLAG_EOC));//uart_putchar('\\r');//uart_putchar('\\n');//uart_putchar(0某0d);//uart_putchar(0某0a);//printf(\//printf(\//printf(\}}#include\voidADC1_Config(void){ADC_InitTypeDefADC_InitStructure;RCC_APB2PeriphClockCmd(RCC_ APB2Periph_ADC1,ENABLE);ADC1_Gpio_Config();ADC_DeInit(ADC1);//复位ADC1,将外设ADC1的全部寄存器重设为缺省值//ADC1配置ADC_InitStructure.ADC_Mode=ADC_Mode_Independent;//ADC1工作在独立模式ADC_InitStructure.ADC_ScanConvMode=ENABLE;//使能扫描ADC_InitStructure.ADC_ContinuouConvMode=ENABLE;;//ADC转换工作在连续模式ADC_InitStructure.ADC_E某ternalTrigConv=ADC_E某ternalTrigConv_None;//由软件控制转换ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right;//转换数据右对齐ADC_InitStructure.ADC_NbrOfChannel=1;//转换通道为通道1ADC_Init(ADC1,&ADC_InitStructure);//初始化ADC//ADC1选择信道0,顺续等级1,采样时间239.5个周期ADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime _28Cycle5);//打开ADC1ADC_Cmd(ADC1,ENABLE);//重置ADC1校准寄存器ADC_ReetCalibration(ADC1);//等待ADC1校准重置完成while(ADC_GetReetCalibrationStatu(ADC1));//开始ADC1校准ADC_StartCalibration(ADC1);//等待ADC1校准完成while(ADC_GetCalibrationStatu(ADC1));//使能ADC1软件开始转换ADC_SoftwareStartConvCmd(ADC1,ENABLE);//配置ADC时钟=PCLK21/612MHzRCC_ADCCLKConfig(RCC_PCLK2_Div6);//使能ADC1模块DMAADC_DMACmd(ADC1,ENABLE);}taticvoidADC1_Gpio_Config(void){GPIO_InitTypeDefGPIO_InitStructure;RCC_APB2PeriphClockCmd(RC C_APB2Periph_GPIOA,ENABLE);GPIO_InitStructure.GPIO_Mode=GPIO_Mod e_AIN;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_Init(GPIOA,&GP IO_InitStructure);}#include\/某其他函数里USART_DMACmd(USART1,USART_DMAReq_T某,ENABLE);uint32_tSendBuff;e某ternfloatADC_Received;e某ternuint8_tADC_Received2[11];//描述:DMA串口的初始化配置voidDMA_Config(void){//初始化结构体DMA_InitTypeDefDMA_InitStructure;//开启DMA时钟RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);//配置DMA中断NVIC_Config();//设置DMA源:地址DMA_InitStructure.DMA_PeripheralBaeAddr=(u32)&ADC1->DR;//某内存地址(要传输的变量的指针)DMA_InitStructure.DMA_DIR=DMA_DIR_PeripheralSRC;//指定DMA通道的DMA缓存的大小,单位为数据单位。
STM32例程串口实验
实验要求∙使用开发板上的串口向PC发送信息∙PC通过串口向开发板发送数据,CPU在接收到后,确认信息,并通过串口返回数据例如:开发板先发送一个字符‘c’,然后PC发送一个字符‘a’,开发板接收到后,再发送一个字符‘b’[编辑] 实验目的∙学习和掌握STM32的USART模块的工作原理和使用方法∙学习和掌握USART固件库的使用∙掌握串口中断的使用方法[编辑] 实验分析硬件分析:USART的工作原理软件分析:USART固件库USART实例[编辑] 开发板原理图设计MAX3232与主芯片的连接[编辑] 硬件知识点详见STM32F10XXX英文版参考手册RM0008-Reference Manual[编辑] USART通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。
USART利用小数波特率发生器提供宽范围的波特率选择。
它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。
它还允许多处理器通信。
使用多缓冲器配置的DMA方式,可以实现高速数据通信。
(表) USART模式支持[编辑] USART内部结构[编辑] 引脚定义任何USART双向通信至少需要两个引脚:接收数据输入(RX)和发送数据输出(TX)。
∙RX:接收数据输入。
通过过采样技术来区别数据和噪音,从而恢复数据。
∙TX:发送数据输出。
当发送器被禁止时,输出引脚恢复到它的I/O端口配置。
当发送器被激活,并且不发送数据时,TX引脚处于高电平。
在单线和智能卡模式里,此I/O口被同时用于数据的发送和接收。
在同步模式中需要下列引脚:∙CK:发送器时钟输出。
此引脚输出用于同步传输的时钟, (在起始位和停止位上没有时钟脉冲,软件可选地,可以在最后一个数据位送出一个时钟脉冲)。
数据可以在RX上同步被接收。
STM32-ADC结合DMA数据采样与软件滤波处理
STM32 ADC结合DMA数据采样与软件滤波处理2012-03-17 23:53:05| 分类:STM32 | 标签:adc结合dma |字号大中小订阅本文原创于观海听涛,原作者所有,请注明出处。
作为一个偏向工控的芯片,ADC采样是一个十分重要的外设。
STM32集成三个12位精度18通道的部ADC,最高速度1微秒,结合DMA可以解放CPU进行更好的处理。
ADC接口上的其它逻辑功能包括:●同步的采样和保持●交叉的采样和保持●单次采样模拟看门狗功能允许非常精准地监视一路、多路或所有选中的通道,当被监视的信号超出预置的阀值时,将产生中断。
由标准定时器(TIMx)和高级控制定时器(TIM1和TIM8)产生的事件,可以分别部级联到ADC 的开始触发和注入触发,应用程序能使AD转换与时钟同步。
12位ADC是一种逐次逼近型模拟数字数字转换器。
它有多达18个通道,可测量16个外部和2个部信号源。
ADC的输入时钟不得超过14MHZ,它是由PCLK2经分频产生。
如果被ADC转换的模拟电压低于低阀值或高于高阀值,AWD模拟看门狗状态位被设置。
关于ADC采样与DMA关系,引用网上一段解释:STM32 的优点在哪里?除去宣传环节,细细分析。
STM32 时钟不算快,72MHZ,也不能扩展大容量的RAM FLASH,同样没有DSP 那样强大的指令集。
它的优势在哪里呢?---就在快速采集数据,快速处理上。
ARM 的特点就是方便。
这个快速采集,高性能的ADC 就是一个很好的体现,12 位精度,最快1uS 的转换速度,通常具备2 个以上独立的ADC 控制器,这意味着,STM32 可以同时对多个模拟量进行快速采集,这个特性不是一般的MCU具有的。
以上高性能的ADC,配合相对比较块的指令集和一些特色的算法支持,就构成了STM32 在电机控制上的强大特性。
好了,正题,怎末做一个简单的ADC,注意是简单的,ADC 是个复杂的问题,涉及硬件设计,电源质量,参考电压,信号预处理等等问题。
STM32 ADC DMA 使用心得
(二)ADC循环采集六路电压,使用DMA.这次实验真的很郁闷,对DMA的不了解让我深陷误区,明白之后,让我更加佩服DMA的强大。
误区就是:从实验的目标我们知道这次是用DMA把ADC转换的数据传送到内存中的一个数组里存起来,因为是采集6个通道,这里使能了ADC的扫描模式。
一旦启动ADC,就会按顺序转换SQRX里选中的通道,问题就是我一开始以为ADC与DMA并不会协调工做,也就是ADC自己转自己的,DMA自己传自己的,这样的话内存里的数组就不是我想要的了,后来着实的研究了很长时间,在群里的一位兄弟的提醒下,我才知道,可能我想的复杂了,也许就可以在ADC转一次,然后DMA把数据传一次,Ok,经过实验得知,这个想法是正确的。
好了,说了这么多废话,开始进入正题。
这里使用了ADC1的六个规则通道分别是:CH0、CH1、CH2、CH3、CH14、CH15,分别对应的引脚为PA0、PA1、PA2、PA3、PC4、PC5。
关于ADC的配置:启动了ADC1的扫描模式,还有连续转换模式,独立工作模式(只用1个ADC),因为用的了DMA,所以也要使能DMA位,使用外部触发(SWSTART),数据为右对齐。
还有SQRX等等就不说了,这里不需要ADC中断的。
中断在DMA里。
关于DMA的配置:因为ADC请求规定在DMA1的第一个通道,所以这里使用DMA_CH1,外设地址为ADC唯一的数据寄存器(u32)&ADC1->DR,存储器地址为(u32)SendBuff数组,这个数组可以存放6个元素。
这里还有使能传输完中断(TCIF),选择从外设读取,循环模式,外设地址非增量模式,存储器地址增量模式,外设数据宽度16位,存储器地址16位,非存储器到存储器模式。
关于DMA中断函数:当DMA传输完6次数据时,TCIF位自动置位,程序进入中断服务函数,首先先关闭ADC的连续转换,我们把数组的处理都放在了这里,处理完发送到串口,通过电脑的超级终端可以看到不停变化的6个引脚电压的数据。
一文带你看懂Stm32定时器+ADC+DMA进行AD采样的实现
一文带你看懂Stm32定时器+ADC+DMA进行AD采样的实现此STM32单片机为STM32F103系列的STM32的ADC有DMA功能这都毋庸置疑,也是我们用的最多的!然而,如果我们要对一个信号(比如脉搏信号)进行定时采样(也就是隔一段时间,比如说2ms),有三种方法:1、使用定时器中断每隔一定时间进行ADC转换,这样每次都必须读ADC的数据寄存器,非常浪费时间!2、把ADC设置成连续转换模式,同时对应的DMA通道开启循环模式,这样ADC就一直在进行数据采集然后通过DMA把数据搬运至内存。
但是这样做的话还得加一个定时中断,用来定时读取内存中的数据!3、使用ADC的定时器触发ADC转换的功能,然后使用DMA进行数据的搬运!这样只要设置好定时器的触发间隔,就能实现ADC定时采样转换的功能,然后可以在程序的死循环中一直检测DMA转换完成标志,然后进行数据的读取,或者使能DMA转换完成中断,这样每次转换完成就会产生中断,我是采用第二种方法。
下面上代码:我这里使用的单通道//定时器初始化voidTIM2_ConfiguraTIon(void){TIM_TImeBaseInitTypeDefTIM_TimeBaseStructure;TIM_OCInitTypeDefTIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_TimeBaseStructure.TIM_Period=1999;//设置2ms一次TIM2比较的周期TIM_TimeBaseStructure.TIM_Prescaler=71;//系统主频72M,这里分频71,相当于1000K 的定时器2时钟TIM_TimeBaseStructure.TIM_ClockDivision=0x0;。
STM32串口DMA方式发送数据

STM32 串口DMA方式接收2011-04-02 18:13 4458人阅读评论(5) 收藏举报 STM32 是一款基于ARM Cortex-M3内核的32位MCU,主频最高可达72M。
最近因为要在车机上集成TPMS功能,便开始着手STM32的开发工作,STM32F10x系列共有5个串口(USART1~USART5),支持DMA方式通信,DMA 方式由于不需要CPU的参与,而是直接由DMA控制器完成串口数据的读写,因而可以很大程度的提高CPU的利用率。
在使用STM32串口之前需要做一系列的初始化工作:1.RCC(复位和时钟控制寄存器)初始化,启用GPIO、DMA、USART时钟。
2.NVIC(嵌套向量中断控制寄存器)初始化,完成各个硬件中断的配置。
ART初始话,配置串口,设置DMA通道等。
4.DMA初始化,完成DMA的配置。
最后是使能USART和DMA。
下面是通过DMA的方式从串口USART1接收数据,STM32工作后串口数据由DMA控制器接收存到指定buffer,读取数据直接从DMA buffer中读取即可。
发送数据采用非DMA方式,首先将待发送的数据存入到发送队列,然后在任务循环中将队列中的数据发送给USART1。
实例代码如下:[cpp]view plaincopyprint?1. //**********************************************************************************************2. // STM32F10x USART Test3. // compiler: Keil UV34. // 2011-03-28 , By friehood5. //**********************************************************************************************6. static int8u rDMABuffer[64]; // DMA buffer7. static int16u rDMARear = sizeof(rDMABuffer);8.9. static int8u USART_RevBuf[64]; // 串口接收buffer10. s tatic int8u USART_SndBuf[64]; // 串口发送buffer11. s tatic int8u Head=0,Tail=0; // 发送buffer的头尾12.13.14. // 串口任务15. v oid Task_USART(void)16. {17. int16u end;18. if (USART1->SR & (USART_FLAG_ORE | USART_FLAG_NE | USART_FLAG_FE))19. {20. USART_ReceiveData(USART1);21. }22.23. // DMA接收24. end = DMA_GetCurrDataCounter(DMA1_Channel5);25. /*if((sizeof(rDMABuffer)-end)>0)26. dbgprt("DMA available datalen=%d/n",sizeof(rDMABuffer)-end); */27. while(rDMARear != end)28. {29. USART_receive(rDMABuffer[sizeof(rDMABuffer)-rDMARear]);30. if (!(--rDMARear))31. {32. rDMARear = sizeof(rDMABuffer);33. }34. }35.36. //发送37. if(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == SET)38. {39. int8u chr;40. // 从发送队列取出一个字符41. if(PopFront(&chr))42. {43. USART_SendData(USART1, chr);44. dbgprt("USART_SendData:0x%02x/n",chr);45. while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)46. {47. }48. }49. }50. }51.52.53. // USART串口初始化54. v oid dev_USART_init(void)55. {56. USART_InitTypeDef USART_InitStructure;57. GPIO_InitTypeDef GPIO_InitStructure;58. DMA_InitTypeDef DMA_InitStructure;59.60. /* DMA1 Channel5 (triggered by USART1 Rx event) Config */ //参见 STM32 datasheet61. DMA_DeInit(DMA1_Channel5);62. DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)&USART1->DR;63. DMA_InitStructure.DMA_MemoryBaseAddr = (u32)rDMABuffer;64. DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;65. DMA_InitStructure.DMA_BufferSize = sizeof(rDMABuffer);66. DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;67. DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;68. DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;69. DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;70. DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;71. DMA_InitStructure.DMA_Priority = DMA_Priority_Low;72. DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;73. DMA_Init(DMA1_Channel5, &DMA_InitStructure);74.75. USART_ART_BaudRate = 9600;76. USART_ART_WordLength = USART_WordLength_8b;77. USART_ART_StopBits = USART_StopBits_1;78. USART_ART_Parity = USART_Parity_No;79. USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;80. USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;81.82. //配置IO: GPIOA9和GPIOA10分别作为串口TX、RX端。
STM32使用DMA加串口空闲中断接收数据

STM32使用DMA加串口空闲中断接收数据在STM32中使用DMA和串口空闲中断接收数据可以实现高效的数据接收。
下面是一个示例代码,可以在1200字以上使用DMA和空闲中断接收数据。
首先,需要启用STM32的串口空闲中断和DMA功能。
在CubeMX中配置相关的引脚和串口设置,并使能空闲中断和DMA接收。
接下来是代码实现:```c#include "stm32f4xx_hal.h"#define UART_RX_BUFFER_SIZE 2048 // 接收缓冲区大小UART_HandleTypeDef huart2;DMA_HandleTypeDef hdma_usart2_rx;uint8_t uart_rx_buffer[UART_RX_BUFFER_SIZE];uint16_t uart_rx_index = 0;```上面的代码定义了串口接收的缓冲区和相关的变量。
```cvoid HAL_UART_IdleCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//空闲中断发生HAL_UART_DMAStop(&huart2);}```这是串口空闲中断回调函数,当串口空闲中断发生时,将设置一个标志表示接收完成,并停止DMA接收。
```cvoid HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//DMA接收完成uart_rx_index += UART_RX_BUFFER_SIZE -hdma_usart2_rx.Instance->CNDTR;if (uart_rx_index >= UART_RX_BUFFER_SIZE)//接收缓冲区满了,重置索引uart_rx_index = 0;}HAL_UART_Receive_DMA(&huart2, uart_rx_buffer,UART_RX_BUFFER_SIZE);}```这是DMA接收完成回调函数,当DMA接收完成时,更新接收缓冲区索引,并重新启动DMA接收。
STM32多路ADC+DMA+串口发送程序

主函数#include "stm32f10x.h"#include <stdio.h>#include "ADC.h"#include "DMA.h"#include "UASRT.h"u16 *dyz;//建立指针u16 sum[16];//printf重定向函数//int fputc(int ch, FILE*f){USART_SendData(USART1, (uint8_t) ch);while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);return (ch);}//延时函数//void delay_ms(u16 time){u16 i=0;while(time--){i=12000; //????while(i--) ;}}//主函数//int main(void){int i,m,n;SystemInit();adc_ini();USART_int();ADC_SoftwareStartConvCmd(ADC1, ENABLE);//ADC1软启动使能dma();while(1){//求10次采集的平均值for(m=0;m<10;m++){dyz=ADC_ConvertedValue;//给指针赋值while(!DMA_GetFlagStatus(DMA1_FLAG_TC1));//等待DAM传输完毕for(i=0;i<16;i++){sum[i]+=*dyz;dyz++;DMA_ClearFlag(DMA1_FLAG_TC1);//清楚DMA发送完成标志位}}for(n=0;n<16;n++){sum[n]/=10;//计算ADC对应通道的平均值printf("%d=%d\n",n,sum[n]);//通过串口输出delay_ms(200);}}}ADC的.h文件#ifndef __ADC_H_#define __ADC_H_void adc_ini(void){ADC_InitTypeDef ADC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);//开启ADC1时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Pe riph_GPIOC,ENABLE);//使能GPIO的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启AFIO时钟//配置模拟输入引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO _Pin_7;//选择第0脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//模拟输入模式GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;//选择第0脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//模拟输入模式GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//选择第0脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//模拟输入模式GPIO_Init(GPIOC, &GPIO_InitStructure);//配置ADCRCC_ADCCLKConfig(RCC_PCLK2_Div6);//ADC时钟6分频ADC_DeInit(ADC1);//ADC1填入缺省值ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;//ADC工作在独立模式ADC_InitStructure.ADC_ScanConvMode = ENABLE;//ADC工作在多通道模式ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//ADC工作在连续模式ADC_InitStructure.ADC_ExternalTrigConv =ADC_ExternalTrigConv_None;//转换由软件启动ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//ADC数据右对齐ADC_InitStructure.ADC_NbrOfChannel = 16;//转换通道数为1ADC_Init(ADC1, &ADC_InitStructure);//载入设置值ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1,ADC_SampleTime_7Cycles5);//选择ADC1通道0采样顺序为1,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2,ADC_SampleTime_7Cycles5);//选择ADC1通道1采样顺序为2,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3,ADC_SampleTime_7Cycles5);//选择ADC1通道2采样顺序为3,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4,ADC_SampleTime_7Cycles5);//选择ADC1通道3采样顺序为4,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 5,ADC_SampleTime_7Cycles5);//选择ADC1通道4采样顺序为5,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 6,ADC_SampleTime_7Cycles5);//选择ADC1通道5采样顺序为6,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_6, 7,ADC_SampleTime_7Cycles5);//选择ADC1通道6采样顺序为7,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_7, 8,ADC_SampleTime_7Cycles5);//选择ADC1通道7采样顺序为8,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 9,ADC_SampleTime_7Cycles5);//选择ADC1通道8采样顺序为9,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_9, 10,ADC_SampleTime_7Cycles5);//选择ADC1通道9采样顺序为10,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_10, 11,ADC_SampleTime_7Cycles5);//选择ADC1通道10采样顺序为11,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_11, 12,ADC_SampleTime_7Cycles5);//选择ADC1通道11采样顺序为12,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_12, 13,ADC_SampleTime_7Cycles5);//选择ADC1通道12采样顺序为13,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_13, 14,ADC_SampleTime_7Cycles5);//选择ADC1通道13采样顺序为14,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_14, 15,ADC_SampleTime_7Cycles5);//选择ADC1通道14采样顺序为15,采样时间7.5周期ADC_RegularChannelConfig(ADC1, ADC_Channel_15, 16,ADC_SampleTime_7Cycles5);//选择ADC1通道15采样顺序为16,采样时间7.5周期ADC_DMACmd(ADC1, ENABLE);//使能ADC1的DMA请求ADC_Cmd(ADC1, ENABLE);//使能ADC1ADC_ResetCalibration(ADC1);//重置ADC校准值while(ADC_GetResetCalibrationStatus(ADC1));//等待重置完毕ADC_StartCalibration(ADC1);//开始ADC校准while(ADC_GetCalibrationStatus(ADC1));//等待校准完毕}#endifDMA的.H文件#ifndef __DMA_H_#define __DMA_H_u16 ADC_ConvertedValue[16];void dma(void){DMA_InitTypeDef DMA_InitStructure;//使能DMA时钟RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);//将DMA通道一设置为缺省值DMA_DeInit(DMA1_Channel1);//定义DMA外设地址DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)( &(ADC1->DR));//定义内存基地址DMA_InitStructure.DMA_MemoryBaseAddr = (u32)ADC_ConvertedValue;//设置外设作为传输的源DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;//指定DMA缓存大小DMA_InitStructure.DMA_BufferSize = 16;//设置外设寄存器地址不递增?DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//设置内存寄存器地址递增DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//设置外设数据宽度为16位DMA_InitStructure.DMA_PeripheralDataSize =DMA_PeripheralDataSize_HalfWord;//设置内存数据的宽度为16位DMA_InitStructure.DMA_MemoryDataSize =DMA_MemoryDataSize_HalfWord;//设置DMA工作在循环模式DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;//设置通道为最高优先级DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh ;//设置通道为外设到内存DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;DMA_Init(DMA1_Channel1, &DMA_InitStructure);//使能DMA通道1DMA_Cmd(DMA1_Channel1, ENABLE);}#endif串口.H文件#ifndef __USART_H_#define __USART_H_void USART_int(void){USART_InitTypeDef USART_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1 ,ENABLE);//使能GPIOA和USART1时钟USART_DeInit(USART1);//填入缺省值给USART1USART_ART_BaudRate = 9600;//波特率为9600USART_ART_WordLength = USART_WordLength_8b;//数据位为8位USART_ART_StopBits = USART_StopBits_1;//1位停止位USART_ART_Parity = USART_Parity_No;//无奇偶校验USART_ART_HardwareFlowControl=USART_HardwareFlowControl_None;//无控制流USART_ART_Mode = USART_Mode_Tx | USART_Mode_Rx;//接收和发送模式USART_Init(USART1, &USART_InitStructure);//载入设置值GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);USART_Cmd(USART1, ENABLE);//使能USART1}#endif。
stm32f030的uart的dma发送函数

stm32f030的uart的dma发送函数STM32F030是一款32位的Cortex-M0微控制器,具有丰富的外设和高性能,广泛应用于嵌入式系统中。
其中,UART(通用异步收发传输器)是一种常用的串行通信接口,STM32F030的UART接口可以使用DMA(直接存储器访问)传输数据,提高交互效率和系统性能。
UART的DMA发送函数主要用于将数据从内存中通过DMA传输到UART发送寄存器。
下面我们将详细介绍STM32F030的UART的DMA发送函数的实现方法。
首先,我们需要配置UART和DMA的相关寄存器,使其工作在所需的模式下。
具体步骤如下:1.基本配置:使能UART和DMA的时钟,并对UART和DMA进行复位。
2.配置UART:设置UART的工作模式、波特率、数据位数等参数,并使能UART的发送功能。
3.配置DMA:设置DMA的工作模式、数据传输方向、数据长度等参数,并使能DMA的发送请求。
4.配置DMA传输请求:将UART的发送请求连接到DMA的传输请求线上。
完成上述基本配置后,我们就可以编写DMA发送函数了。
该函数主要包含以下几个步骤:1.分配内存:定义一个足够大的缓冲区,用于存储待发送的数据。
2.填充数据:将需要发送的数据填充到缓冲区中。
3.配置DMA传输:设置DMA的数据来源地址为缓冲区地址,目标地址为UART的发送寄存器地址,传输长度为数据长度。
4.启动DMA传输:使能DMA的发送请求,启动数据传输。
5.等待传输完成:等待DMA传输完成,通过查询或中断的方式判断传输是否完成。
6.清除传输标志:清除DMA的传输完成标志位。
7.释放内存:释放之前分配的缓冲区内存。
需要注意的是,配置和使用DMA时需要仔细查阅相关的参考手册和编程手册,并根据实际需求进行相应的配置和调整。
同时,在数据发送过程中,还要注意处理错误和异常情况,以保证数据传输的可靠性和稳定性。
综上所述,STM32F030的UART的DMA发送函数是通过配置UART和DMA的相关寄存器,将数据通过DMA传输到UART的发送寄存器中。
STM32串口发送数据和接收数据方式总结!
STM32串⼝发送数据和接收数据⽅式总结!串⼝发送数据1、串⼝发送数据最直接的⽅式就是标准调⽤库函数。
voidUSART_SendData(USART_TypeDef* USARTx, uint16_tData) ;第⼀个参数是发送的串⼝号,第⼆个参数是要发送的数据,但是⽤过的朋友应该觉得不好⽤,⼀次只能发送单个字符,所以我们有必要根据这个函数加以扩展:voidSend_data(u8 *s){while(*s!= '0'){while(USART_GetFlagStatus(USART1,USART_FLAG_TC )==RESET);USART_SendData(USART1,*s);s++;}}以上程序的形参就是我们调⽤该函数时要发送的字符串,这⾥通过循环调⽤USART_SendData来⼀⼀发送我们的字符串。
while(USART_GetFlagStatus(USART1,USART_FLAG_TC )==RESET);这句话有必要加,它是⽤于检查串⼝是否发送完成的标志,如果不加这句话会发⽣数据丢失的情况。
这个函数只能⽤于串⼝1发送。
有些时候根据需要,要⽤到多个串⼝发送,那么就还需要改进这个程序。
如下:voidSend_data(USART_TypeDef * USARTx,u8 *s){while(*s!= '0'){while(USART_GetFlagStatus(USARTx,USART_FLAG_TC )==RESET);USART_SendData(USARTx,*s);s++;}}这样就可实现任意的串⼝发送。
但有⼀点,我在使⽤实时操作系统的时候(如UCOS,Freertos等),需考虑函数重⼊的问题。
当然也可以简单的实现把该函数复制⼀下,然后修改串⼝号也可以避免该问题。
然⽽这个函数不能像printf那样传递多个参数,所以还可以再改进,最终程序如下:voidUSART_printf( USART_TypeDef * USARTx, char* Data, ... ){constchar*s;intd;charbuf[ 16];va_list ap;va_start(ap, Data);while( * Data != 0) // 判断是否到达字符串结束符{if( * Data == 0x5c) //''{switch( *++Data ){case'r': //回车符USART_SendData(USARTx, 0x0d);Data ++;break;case'n': //换⾏符USART_SendData(USARTx, 0x0a);Data ++;break;default:Data ++;break;}}elseif( * Data == '%'){ //switch( *++Data ){case's': //字符串s = va_arg(ap, constchar*);for( ; *s; s++){USART_SendData(USARTx,*s);while( USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET ); }Data++;break;case'd'://⼗进制d = va_arg(ap, int);itoa(d, buf, 10);for(s = buf; *s; s++){USART_SendData(USARTx,*s);while( USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET ); }Data++;break;default:Data++;break;}}elseUSART_SendData(USARTx, *Data++);while( USART_GetFlagStatus ( USARTx, USART_FLAG_TXE ) == RESET );}}该函数就可以像printf使⽤可变参数,⽅便很多。
STM32 USART 串口 DMA 接收和发送的源码详解!
void DMA_Uart_Init(void) {
DMA_InitTypeDef DMA_InitStructure;
/* DMA clock enable */ RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); // 开启 DMA1 时钟
// 优先级设置
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Enable the USART Interrupt */ NVIC_InitStructure.NVIC_IRQChannel = LUMMOD_UART_IRQn;
生的,产生的条件是这样的,当清除 IDLE 标志位后,必须有接收到第一个数据
后,才开始触发,一断接收的数据断流,没有接收到数据,即产生 IDLE 中断。
USART 和 DMA 硬件初始化配置
/*--- LumModule Usart Config ---------------------------------------*/
/* Enable GPIO clock */ RCC_APB2PeriphClockCmd(LUMMOD_UART_GPIO_CLK , ENABLE ); // 开启串口所在 IO 端口的时钟 /* Enable USART Clock */ RCC_APB1PeriphClockCmd(LUMMOD_UART_CLK, ENABLE); // 开始串口时钟
否则当 DMA 接收计数器递减到 0 的时候,又会重载这个计数值,重新循环递
stm32串口发送函数

stm32串口发送函数STM32是一款广泛应用于嵌入式系统开发的微控制器,其具有高性能、低功耗、易于开发等优点。
在STM32的开发中,串口通信是一种常见的通信方式,而串口发送函数则是实现串口通信的重要组成部分。
STM32串口发送函数的实现需要考虑多方面的因素,包括串口的配置、数据的发送方式、数据的格式等。
下面将从这些方面对STM32串口发送函数进行详细介绍。
1. 串口的配置在使用STM32串口发送函数之前,需要先对串口进行配置。
串口的配置包括波特率、数据位、停止位、校验位等参数的设置。
这些参数的设置需要根据具体的应用场景进行选择,以保证数据的可靠传输。
2. 数据的发送方式STM32串口发送函数支持多种数据发送方式,包括阻塞发送、非阻塞发送、DMA发送等。
阻塞发送是指在数据发送完成之前,程序会一直等待,直到数据发送完成后才会继续执行下一条指令。
非阻塞发送是指在数据发送过程中,程序可以继续执行其他指令,不会等待数据发送完成。
DMA发送是指通过DMA控制器实现数据的发送,可以大大提高数据发送的效率。
3. 数据的格式STM32串口发送函数支持多种数据格式,包括ASCII码、十六进制等。
在发送ASCII码时,需要将数据转换为ASCII码格式,然后通过串口发送出去。
在发送十六进制时,需要将数据转换为十六进制格式,然后通过串口发送出去。
下面是一个简单的STM32串口发送函数的实现示例:```void USART_SendData(USART_TypeDef* USARTx, uint16_t Data) {/* 发送一个字节数据到USARTx */USARTx->DR = (Data & (uint16_t)0x01FF);/* 等待发送完成 */while(!(USARTx->SR & USART_FLAG_TXE));}```在这个函数中,首先将要发送的数据写入USARTx的数据寄存器DR 中,然后等待发送完成。
STM32F1库函数初始化系列:DMA—ADC采集

STM32F1库函数初始化系列:DMA—ADC采集1void ADC_Configure(void)2 {3 ADC_InitTypeDef ADC_InitStructure;4 GPIO_InitTypeDef GPIO_InitStructure;5 RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);6 RCC_AHBPeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);78 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6;9 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;10 GPIO_Init(GPIOA, &GPIO_InitStructure);1112 RCC_ADCCLKConfig(RCC_PCLK2_Div4); //配置ADC时钟分频 2,4,6,813 ADC_InitStructure.ADC_Mode=ADC_Mode_Independent; //独⽴⼯作模式14 ADC_InitStructure.ADC_ScanConvMode=ENABLE; //⼯作在扫描模式15 ADC_InitStructure.ADC_ContinuousConvMode=ENABLE; //连续模式16 ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None; //转换由软件触发启动17//ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_T1_CC1; //定时器1的捕获⽐较通道1作为外部触发转换源(T1_2,T1_3,T2_2,T4_4)18//ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_Ext_1T11; //外部中断通道11的事件作为外部触发转换源19 ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right; //ADC数据右对齐20 ADC_InitStructure.ADC_NbrOfChannel =5; //进⾏规则转换的ADC通道的数⽬为221 ADC_Init(ADC1,&ADC_InitStructure);22 ADC_RegularChannelConfig(ADC1,ADC_Channel_2,1,ADC_SampleTime_55Cycles5); //选择通道2,转换顺序1,采样时间为1.5周期23 ADC_RegularChannelConfig(ADC1,ADC_Channel_3,2,ADC_SampleTime_55Cycles5); //选择通道3,转换顺序2,采样时间为1.5周期24 ADC_RegularChannelConfig(ADC1,ADC_Channel_4,3,ADC_SampleTime_55Cycles5); //选择通道4,转换顺序3,采样时间为1.5周期25 ADC_RegularChannelConfig(ADC1,ADC_Channel_5,4,ADC_SampleTime_55Cycles5); //选择通道5,转换顺序4,采样时间为1.5周期26 ADC_RegularChannelConfig(ADC1,ADC_Channel_6,5,ADC_SampleTime_55Cycles5); //选择通道6,转换顺序5,采样时间为1.5周期27 ADC_DMACmd(ADC1, ENABLE);28 ADC_Cmd(ADC1,ENABLE); //使能AD129 ADC_ResetCalibration(ADC1); //复位ADC1的校准寄存器30 ADC_StartCalibration(ADC1); //开始ADC1的校准31while(ADC_GetCalibrationStatus(ADC1)); //等待ADC1校准完成32 ADC_SoftwareStartConvCmd(ADC1,ENABLE); //启动ADC1转换33 }34void DMA_Configure(void)35 {36 DMA_InitTypeDef DMA_InitStructure;37 RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);38 DMA_DeInit(DMA1_Channel1); //复位DMA1通道39 DMA_InitStructure.DMA_PeripheralBaseAddr=DR_ADDRESS;40 DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ad_value;41 DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //外设作为数据传输的来源42 DMA_InitStructure.DMA_M2M=DMA_M2M_Disable;43 DMA_InitStructure.DMA_BufferSize = 5; //44 DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址不变45 DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址递增46 DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //外设数据宽度为16位47 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //内存数据宽度为16位48 DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //循环缓存模式49 DMA_InitStructure.DMA_Priority = DMA_Priority_High; //⾼优先级50 DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //没有设置内存到内存的传输51 DMA_Init(DMA1_Channel1, &DMA_InitStructure);52 DMA_ITConfig(DMA1_Channel1, DMA_IT_TC, ENABLE);53 DMA_Cmd(DMA1_Channel1,ENABLE); //开启DMA1通道传输54 }。
STM32ADC在DMA中断模式下多通道数据采集

STM32ADC在DMA中断模式下多通道数据采集在DMA中断模式下进行多通道数据采集,需要进行以下步骤:1.初始化ADC模块:使用HAL库或者标准库,初始化ADC模块,设置采样时间、分辨率、触发源等参数。
同时,还需要配置ADC的多通道模式,选择需要采集的通道。
2.配置DMA:使用HAL库或者标准库,初始化DMA模块,设置DMA通道、数据传输方向、数据传输长度等参数。
3.设置中断回调函数:配置DMA传输完成后的中断回调函数,当DMA传输完成后会触发中断,在该中断中可以进行数据处理操作。
4.开始数据采集:启动ADC和DMA,开始进行数据采集。
下面是一个使用HAL库的示例代码,实现了三个通道的数据采集,每次采集10个数据点,采集完成后会触发中断进行数据处理:```c#include "stm32f4xx_hal.h"#define DATA_SIZE 10ADC_HandleTypeDef hadc1;DMA_HandleTypeDef hdma_adc1;uint16_t adc_data[DATA_SIZE * 3]; // 保存采集到的数据uint8_t current_channel = 0; // 当前采集的通道//ADCDMA中断回调函数void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) if (current_channel == 3)//数据采集完成,进行数据处理操作// 处理adc_data中已经采集到的数据// 重置current_channelcurrent_channel = 0;} else//继续采集下一个通道的数据current_channel++;HAL_ADC_Start_DMA(&hadc1, adc_data + DATA_SIZE * current_channel, DATA_SIZE);}int main(void)HAL_Init(;//初始化ADC模块__HAL_RCC_ADC1_CLK_ENABLE(;hadc1.Instance = ADC1;hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;hadc1.Init.Resolution = ADC_RESOLUTION_12B;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.ContinuousConvMode = DISABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.ExternalTrigConvEdge =ADC_EXTERNALTRIGCONVEDGE_NONE;hadc1.Init.DMAContinuousRequests = ENABLE;hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;hadc1.Init.NbrOfConversion = 3;hadc1.Init.ScanConvMode = ENABLE;HAL_ADC_Init(&hadc1);//配置ADC的通道顺序ADC_ChannelConfTypeDef sConfig;sConfig.Channel = ADC_CHANNEL_0;sConfig.Rank = 1;sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;HAL_ADC_ConfigChannel(&hadc1, &sConfig);sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = 2;HAL_ADC_ConfigChannel(&hadc1, &sConfig);sConfig.Channel = ADC_CHANNEL_2;sConfig.Rank = 3;HAL_ADC_ConfigChannel(&hadc1, &sConfig);//初始化DMA模块__HAL_RCC_DMA2_CLK_ENABLE(;hdma_adc1.Instance = DMA2_Stream0;hdma_adc1.Init.Channel = DMA_CHANNEL_0;hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD; hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD; hdma_adc1.Init.Mode = DMA_CIRCULAR;hdma_adc1.Init.Priority = DMA_PRIORITY_LOW;HAL_DMA_Init(&hdma_adc1);//设置DMA中断回调函数HAL_NVIC_SetPriority(DMA2_Stream0_IRQn, 0, 0);HAL_NVIC_EnableIRQ(DMA2_Stream0_IRQn);__HAL_DMA_ENABLE_IT(&hdma_adc1, DMA_IT_TC);//关联ADC和DMA__HAL_LINKDMA(&hadc1, DMA_Handle, hdma_adc1);//开始数据采集HAL_ADC_Start_DMA(&hadc1, adc_data, DATA_SIZE);while (1)//业务逻辑代码}//DMA中断处理函数void DMA2_Stream0_IRQHandler(void)HAL_DMA_IRQHandler(&hdma_adc1);```通过以上代码,就可以实现多通道的数据采集。
STM32定时器触发AD采样+DMA传输问题

STM32定时器触发AD采样+DMA传输问题试验环境:EWARM 4.41A + J-link + 目标板试验内容:TIM1->CC1触发ADC采样,单通道,采样结果使用DMA传输到SRAM中。
问题:下载程序提示SRAM校验错误,拔下J-link 一端的USB 口再插上,下载OK --->停止程序,再下载,提示错误,再拔下J-link USB 口,再下载,OK---> ...如此反复。
仔细看了下Debuglog,发现存放DMA传输到的目标内存数据校验错误(IAR debugger选项中的verify download 选上),如下:Verify error at address 0x2000007C, target byte: 0x3F, byte in file: 0x01分析:可能是停止程序的时候,TIM1和ADC,DMA都没有停下来,下载的时候,DMA 一直写数据到开辟的内存中,导致那部分内存数据校验错误。
以上只是个人的一些看法,不知道不否正确,有没有哪位帮分析下。
/******************************************************************************/附录1:试验程序源码:/* Includes ------------------------------------------------------------------- */#include "stm32f10x_lib.h”/* Private typedef ---------------------------------------------------------- *//* Private define ------------------------------------------------------------ */#define ADC1_DR_Address ((u32)0x4001244C)/* Private macro ----------------------------------------------------------- *//* Private variables -------------------------------------------------------- */ADC_InitTypeDef ADC_InitStructure;DMA_InitTypeDef DMA_InitStructure;TIM1_TimeBaseInitTypeDef TIM1_TimeBaseStructure;TIM1_OCInitTypeDef TIM1_OCInitStructure;TIM1_BDTRInitTypeDef TIM1_BDTRInitStructure;u16 ADC_RegularConvertedValueTab[32];ErrorStatus HSEStartUpStatus;/* Private function prototypes ---------------------------------------------- */void RCC_Configuration(void);void GPIO_Configuration(void);void NVIC_Configuration(void);/* Private functions -------------------------------------------------------- *//******************************************************************************** Function Name : main* Description : Main program* Input : None* Output : None* Return : None*****************************************************************************int main(void)(#ifdef DEBUGdebug();#endif/* System clocks configuration --------------------------------------------- */RCC_Configuration();/* NVIC configuration ----------------------------------------------------- */NVIC_Configuration();/* GPIO configuration ---------------------------------------------------- */GPIO_Configuration();TIM1_DeInit();/* Time Base configuration */TIM1_TimeBaseStructure.TIM1_Prescaler = 0x00;TIM1_TimeBaseStructure.TIM1_CounterMode = TIM1_CounterMode_Up;TIM1_TimeBaseStructure.TIM1_Period = 3599;TIM1_TimeBaseStructure.TIM1_ClockDivision = 0x00;TIM1_TimeBaseStructure.TIM1_RepetitionCounter = 0x00;TIM1_TimeBaseInit(&TIM1_TimeBaseStructure);/* Channel1 Configuration in PWM mode */TIM1_OCInitStructure.TIM1_OCMode = TIM1_OCMode_PWM1;TIM1_OCInitStructure.TIM1_OutputState = TIM1_OutputState_Enable;TIM1_OCInitStructure.TIM1_OutputNState = TIM1_OutputNState_Enable;TIM1_OCInitStructure.TIM1_Pulse = 100;TIM1_OCInitStructure.TIM1_OCPolarity = TIM1_OCPolarity_Low;TIM1_OCInitStructure.TIM1_OCNPolarity = TIM1_OCNPolarity_High;TIM1_OCInitStructure.TIM1_OCIdleState = TIM1_OCIdleState_Set;TIM1_OCInitStructure.TIM1_OCNIdleState = TIM1_OCIdleState_Reset;TIM1_OC1Init(&TIM1_OCInitStructure);/* TIM1 main Output Enable */TIM1_CtrlPWMOutputs(ENABLE);/* TIM1 counter enable */TIM1_Cmd(ENABLE);/* DMA Channel1 Configuration ---------------------------------------------- */DMA_DeInit(DMA_Channel1);DMA_InitStructure.DMA_Periphera l BaseAddr = ADC1_DR_Address;DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&ADC_RegularConvertedValueTab; DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;DMA_InitStructure.DMA_BufferSize = 32;DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;DMA_Init(DMA_Channel1, &DMA_InitStructure);/* Enable DMA channel1 */DMA_Cmd(DMA_Channel1, ENABLE);/* ADC1 configuration ------------------------------------------------------ */ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;ADC_InitStructure.ADC_ScanConvMode = DISABLE;ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC1;ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;ADC_InitStructure.ADC_NbrOfChannel = 1;ADC_Init(ADC1, &ADC_InitStructure);/* ADC1 regular channel14 configuration */ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_13Cycles5); /* Enable ADC1 DMA */ADC_DMACmd(ADC1, ENABLE);/* Enable ADC1 external trigger */ADC_ExternalTrigConvCmd(ADC1, ENABLE);/* Enable ADC1 */ADC_Cmd(ADC1, ENABLE);/* TIM1 counter enable *///TIM1_Cmd(ENABLE);/* Test on channell transfer complete flag */while(!DMA_GetFlagStatus(DMA_FLAG_TC1));/* Clear channell transfer complete flag */ DMA_ClearFlag(DMA_FLAG_TC1);/* TIM1 counter disable *///TIM1_Cmd(DISABLE);while (1)())/******************************************************************************** Function Name : RCC_Configuration* Description : Configures the different system clocks.* Input : None* Output : None* Return : None*******************************************************************************/void RCC_Configuration(void) (/* RCC system reset(for debug purpose) */RCC_DeInit();/* Enable HSE */RCC_HSEConfig(RCC_HSE_ON);/* Wait till HSE is ready */HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){/* Enable Prefetch Buffer */FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);/* Flash 2 wait state */FLASH_SetLatency(FLASH_Latency_2);/* HCLK = SYSCLK */RCC_HCLKConfig(RCC_SYSCLK_Div1);/* PCLK2 = HCLK */RCC_PCLK2Config(RCC_HCLK_Div1);/* PCLK1 = HCLK/2 */RCC_PCLK1Config(RCC_HCLK_Div2);/* ADCCLK = PCLK2/4 */RCC_ADCCLKConfig(RCC_PCLK2_Div4);/* PLLCLK = 8MHz * 7 = 56 MHz */RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_7);/* Enable PLL */RCC_PLLCmd(ENABLE);/* Wait till PLL is ready */while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){)/* Select PLL as system clock source */RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);/* Wait till PLL is used as system clock source */while(RCC_GetSYSCLKSource() != 0x08){))/* Enable peripheral clocks -------------------------------------------------- *//* Enable DMA clock */RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA, ENABLE);/* Enable GPIOA, GPIOC, ADC1 and TIM1 clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC |RCC_APB2Periph_ADC1 | RCC_APB2Periph_TIM1, ENABLE); )/******************************************************************************** Function Name : GPIO_Configuration* Description : Configures the different GPIO ports.* Input : None * Output : None * Return : None*******************************************************************************/ void GPIO_Configuration(void)GPIO_InitTypeDef GPIO_InitStructure;/* Configure PC.01 and PC.04 (ADC Channel11 and Channel14) as analog input */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;GPIO_Init(GPIOC, &GPIO_InitStructure);/******************************************************************************* * Function Name : NVIC_Configuration * Description : Configures NVIC and Vector Table base location.* Input : None * Output : None * Return : None*******************************************************************************/ void NVIC_Configuration(void) { #ifdef VECT TAB RAM /* Set the Vector Table base location at 0x20000000 */NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);#else /* VECT TAB FLASH */ /* Set the Vector Table base location at 0x08000000 */NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);#endif/******************************************************************************/附录 2 : Debug LogThu Jan 03 20:00:46 2008: DLL version: V3.62a, compiled Feb 23 2007 17:06:09Thu Jan 03 20:00:46 2008: Firmware: J-Link compiled Jun 14 2007 14:36:33 ARM Rev.5Thu Jan 03 20:00:46 2008: JTAG speed is initially set to: 32 kHzThu Jan 03 20:00:46 2008: Found Cortex-M3, Little endian.Thu Jan 03 20:00:46 2008: TPIU fitted.Thu Jan 03 20:00:46 2008: FPUnit: 6 code (BP) slots and 2 literal slotsThu Jan 03 20:00:46 2008: Software reset was performedThu Jan 03 20:00:46 2008: Initial reset was performedThu Jan 03 20:00:46 2008: J-Link found 2 JTAG devices. ARM core Id: 3BA00477(Cortex M3), ARMcore Id: 00000000(ARM9)Thu Jan 03 20:00:46 2008: Device at TAP0 selectedThu Jan 03 20:00:47 2008: 3080 bytes downloaded and verified (5.20 Kbytes/sec)Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007C, target byte: 0x42, byte in file: 0x01Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007D, target byte: 0x08, byte in file: 0x80Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007E, target byte: 0xCE, byte in file: 0x70Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007F, target byte: 0x07, byte in file: 0x47Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000080, target byte: 0x42, byte in file: 0x50Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000081, target byte: 0x08, byte in file: 0xF0Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000082, target byte: 0xCF, byte in file: 0x00Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000083, target byte: 0x07, byte in file: 0x60Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000084, target byte: 0x43, byte in file: 0x81Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000085, target byte: 0x08, byte in file: 0x05 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000086, target byte: 0xCE, byte in file: 0x02 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000087, target byte: 0x07, byte in file: 0xD0 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000088, target byte: 0x42, byte in file: 0x5F Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000089, target byte: 0x08, byte in file: 0xF0 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008A, target byte: 0xCE, byte in file: 0xFF Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008B, target byte: 0x07, byte in file: 0x30 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008C, target byte: 0x42, byte in file: 0x70 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008D, target byte: 0x08, byte in file: 0x47 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008E, target byte: 0xCF, byte in file: 0x2E Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000008F, target byte: 0x07, byte in file: 0x49 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000090, target byte: 0x41, byte in file: 0x0A Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000091, target byte: 0x08, byte in file: 0x68 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000092, target byte: 0xCE, byte in file: 0xD2 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000094, target byte: 0x41, byte in file: 0xFB Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000095, target byte: 0x08, byte in file: 0xD4 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000096, target byte: 0xCB, byte in file: 0x2D Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000097, target byte: 0x07, byte in file: 0x4A Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000098, target byte: 0x42, byte in file: 0x13 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000099, target byte: 0x08, byte in file: 0x68 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000009A, target byte: 0xCD, byte in file: 0x53 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000009B, target byte: 0x07, byte in file: 0xF0 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000005C, target byte: 0x40, byte in file: 0x15 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000005D, target byte: 0x08, byte in file: 0x00 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000005E, target byte: 0xC8, byte in file: 0x00Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000005F, target byte: 0x07, byte in file: 0x20 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000060, target byte: 0x3E, byte in file: 0x03 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000061, target byte: 0x08, byte in file: 0x4C Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000062, target byte: 0xD3, byte in file: 0x4F Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000063, target byte: 0x07, byte in file: 0xF0 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000064, target byte: 0x49, byte in file: 0x00 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000065, target byte: 0x08, byte in file: 0x00 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000066, target byte: 0xD2, byte in file: 0xA0 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000067, target byte: 0x07, byte in file: 0x47 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000068, target byte: 0x45, byte in file: 0x02 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000069, target byte: 0x08, byte in file: 0x4C Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006A, target byte: 0xD1, byte in file: 0x03 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006B, target byte: 0x07, byte in file: 0x4D Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006C, target byte: 0x42, byte in file: 0xAE Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006D, target byte: 0x08, byte in file: 0x46 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006E, target byte: 0xCE, byte in file: 0x20 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000006F, target byte: 0x07, byte in file: 0x47 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000070, target byte: 0x41, byte in file: 0xC1 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000071, target byte: 0x08, byte in file: 0x05 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000072, target byte: 0xCA, byte in file: 0x00 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000073, target byte: 0x07, byte in file: 0x20 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000074, target byte: 0x40, byte in file: 0xC9 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000075, target byte: 0x08, byte in file: 0x06 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000076, target byte: 0xC9, byte in file: 0x00 Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000077, target byte: 0x07, byte in file: 0x20Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x20000078, target byte: 0x3B, byte in file: 0x9DThu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007A, target byte: 0xD1, byte in file: 0x00Thu Jan 03 20:00:47 2008: Warning:Verify error at address 0x2000007B, target byte: 0x07, byte in file: 0x20Thu Jan 03 20:00:47 2008: There were warnings during download of FLASH loader, see Log WindowThu Jan 03 20:00:48 2008: Failed to load flash loader: C:\Program Files\IAR Systems\Embedded Workbench 4.0 Evaluation\ARM\config\flashloader\ST\FlashSTM32F10x.d79出处:jessemok。
STM32使用DMA加串口空闲中断接收数据
STM32使用DMA加串口空闲中断接收数据STM32中,需要用串口接收数据,是使用串口中断来接收数据。
但是用这种方法的话,就要频繁进入串口中断,然后处理,效率就比较低。
于是就想到用DMA来接收串口数据,这个STM32也是支持的。
但是关键的一点,怎么知道数据接收完毕了呢?如果接收的数据长度固定,那就好办,直接设置DMA的接收数据个数就行了。
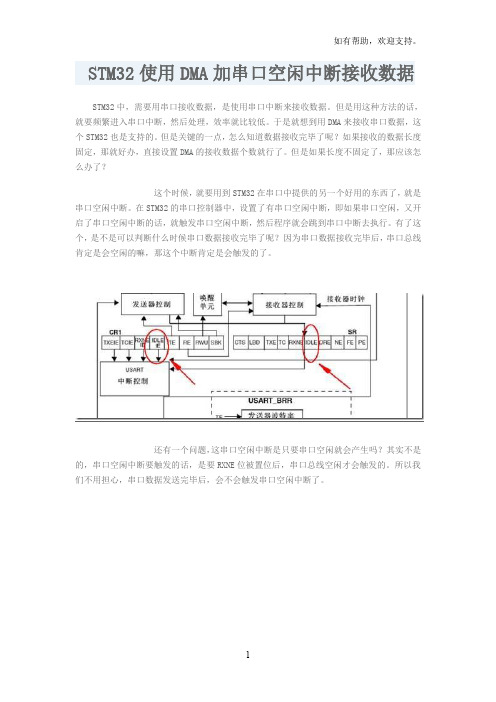
但是如果长度不固定了,那应该怎么办了?这个时候,就要用到STM32在串口中提供的另一个好用的东西了,就是串口空闲中断。
在STM32的串口控制器中,设置了有串口空闲中断,即如果串口空闲,又开启了串口空闲中断的话,就触发串口空闲中断,然后程序就会跳到串口中断去执行。
有了这个,是不是可以判断什么时候串口数据接收完毕了呢?因为串口数据接收完毕后,串口总线肯定是会空闲的嘛,那这个中断肯定是会触发的了。
还有一个问题,这串口空闲中断是只要串口空闲就会产生吗?其实不是的,串口空闲中断要触发的话,是要RXNE位被置位后,串口总线空闲才会触发的。
所以我们不用担心,串口数据发送完毕后,会不会触发串口空闲中断了。
下面用代码来说明。
1、配置串口。
包括设置串口的引脚配置,串口的配置,串口中断的配置,串口的接收DMA的配置void USART_init(void){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;//开启时钟RCC_APB2PeriphClockCmd(USART_RCC,ENABLE);//配置TX端口GPIO_InitStructure.GPIO_Pin = GPIO_USART_TX;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIO_USART_TYPE,&GPIO_InitStructure);//配置RX端口GPIO_InitStructure.GPIO_Pin = GPIO_USART_RX;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIO_USART_TYPE,&GPIO_InitStructure);//配置串口模式USART_ART_BaudRate = 115200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1,&USART_InitStructure);//中断配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);/* 若总线空闲,产生中断 */USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);/*开启串口DMA接收*/USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE);USART_Cmd(USART1,ENABLE);}代码比较简单,一看就明白了,这就是使用库函数开发的好处,代码易懂。