基于OpenCV的机器视觉图像处理技术实现
OpenCV图像处理技术介绍
OpenCV图像处理技术介绍一、概述OpenCV(Open Source Computer Vision Library)是一款用于计算机视觉和机器视觉的开源跨平台库。
它被广泛应用于计算机视觉、图像处理、机器学习、人工智能等领域,是一种非常强大、开放的框架。
本文将重点介绍 OpenCV 图像处理技术,以帮助读者了解它的具体应用和实现过程。
二、图像的读取和展示要使用 OpenCV 进行图像处理,需要先加载图像。
OpenCV 支持多种图像格式,如 BMP、JPEG、PNG、GIF 等。
用OpenCV 加载图像的方法有两种:一种是cv::imread() 函数,另一种是 cv::VideoCapture 类。
cv::imread() 函数可以通过指定图像路径或网络 URL 加载本地或远程图像,读取后返回一个 cv::Mat 对象,然后可以使用cv::imshow() 函数将图像展示在屏幕上。
三、灰度化和二值化灰度化将一个彩色图像转换为黑白图像,使得图像的像素值只有一个亮度值,而没有颜色信息。
在 OpenCV 中,可以通过cv::cvtColor() 函数将一张彩色图像转换为灰度图像。
二值化是将灰度图像中的像素值转换为 0 或 255,即黑色或白色。
它主要用于将图像转换为二进制图像,方便进一步处理。
在OpenCV 中,可以使用 cv::threshold() 函数实现图像的二值化,可以设置操作的阈值、最大值和操作类型等参数。
四、图像滤波图像滤波是指对图像进行平滑或增强的处理方法。
在 OpenCV 中,可以使用 cv::GaussianBlur() 函数实现图像的高斯滤波,可以设置卷积核的大小和标准差等参数,以及边缘处理的方法。
此外,还可以使用 cv::medianBlur() 函数进行中值滤波,cv::bilateralFilter() 函数进行双边滤波,以及 cv::blur() 函数进行均值滤波等。
基于OpenCV的图像处理

O e C 在 计算 机 视 觉 领 域 得 到 广 泛应 用 , 其 突 出 的优 点 是 密 不 pnV 与 可分 的 :
●跨 平台 , 可移 植性好 , 无论 Widw 、iu n o sLn x还是 Ma S都可 以 cO
运行 ; ●支 持 大 多数 C/c +编 译 器 , : 6 V .E 20 、 CN T 05 + 如 VC . CN T 0 8V .E 20 0、
下 面就以人脸检测为例 , 介绍 O eC pn V的应用。人脸检测属 于人脸 识5 (aeR cgio ) J F c eont n第一步 , J I i 人脸大体可 以分为以下几种方法 : 基于神 经 网络 的检测 , 基于特征 的检测 , 于颜色 的检测等 。基于神经 网络的 基 检测 , 需要大量 的真假人脸 图像来训练神经 网络 ; 基于特征的方法是利 用人脸 的一 些特征 , 比如眼睛 、 子等来检测 ; 鼻 基于颜 色的方法是通过 人 脸 的 颜 色 如 黄色 、 色 来 检 测 。 棕 O eC 中 已 经提 供 了训 练 好 的 Har 联 分 类 器 ,使 得 人 脸 检 测 pnV a级 可 以很 方 便 的 实现 。O e C 中 的 Har 征 的 级 联 表 中包 含 的是 bot pnV a特 os 分类器 。所谓 H a级联分类器是指 由若 干个 简单 bot 类器级联成 m" os分 的一个大的分类器 , 被检测的 目标依次通过每一个分类器 , 以通过所 可 有 分 类 器 的 即 可 判 定 为 人 脸 区 域 。Opn V 中的 人 脸 检 测 主要 分 为 四 eC 步, 其具体过程 如下所示 :
图像预处理 r — 加载分类器 r 人脸检测 r — 目 标标记
基于OpenCV环境的SIFT、SURF、ORB算法比较分析

化 工 自 动 化 及 仪 表
第 45卷
基 于 OpenCV环 境 的 SI FT、SU RF、 ORB算 法 比较 分 析
刘 伟 钱 莉
(上 海工 程 技 术 大 学 机 械 学 院 )
摘 要 介 绍 SIFT算 法 、SURF算 法 和 ORB算 法原 理 ,分析 3种 算 法在 特 征 点 的 提 取 帧 率 与 匹 配数 目
上 的差 别 。 实验 结 果 表 明 :ORB算 法在 特 征 点 的提 取 帧 率最 高 ,SURF算 法 次 之 ,SIFT算 法 最低 ;SIFT算
法 的 匹 配数 目最 高 ,SURF算 法 次之 ,ORB算 法 最低 。 关 键 词 图像 处 理 机 器 视 觉 SIFT算 法 SURF算 法 ORB算 法 帧 率 匹配 数 目 特 征 点 提 取 与
作 者 简 介 :刘伟 (1994一),硕 士 研 究 生 ,从 事 机器 视 觉 的研 究 。 通 讯 作 者 :钱 莉 (1980·),讲 师 ,从 事 机 器 视 觉 的研 究 ,99739545@ qq.cor n。
第 9期
刘 伟 等 .基 于 OpenCV 环 境 的 SIFT、SURF、ORB算 法 比较 分析
1.2 SURF算 法 SURF算法最 初 由 Bay H等发 表在 2006年 的
《European Conference on Computer Vision>)上 的论
文 中提 出 ,并 在 2008年 正式 发表 在 《Computer Vi·
sion and Image understanding》上 。SURF算 法 的
SIFT算 法 是 一 种 局 部 特 征 检 测 算 法 。 SIFT 算 法步 骤如 下 :
基于OpenCV的暗视觉图像处理的研究
1 引 言 Leabharlann 胞, 所 以人 类 视 觉 有 着 明视 觉 和 暗 视 觉 之 分 。人
近年 来 , 数 字 图像 处 理技 术 广 泛 地应 用 于 视频 监控 、 医疗 检i 贝 0 、 图像 通讯 等领 域 。但在低 照 度 的环 境下 , 采集 到 的图像 对 比度 和信 噪 比都很 低 , 往往 不 能满足 实 际 的需 要 。 由于人 眼 的生 理 视 觉 特性 , 我
中 图分类 号 : T P 3 9 1 . 4 1 文献 标识 码 : A DOI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 5 0 7 8 . 2 0 1 3 . 0 3 . 0 1 8
Re s e a r c h o n i ma g e pr o c e s s i n g i n s c o t o p i c
第4 3卷 第 3期
2 0 1 3年 3月
激 光 与 红 外
LASER & I NF RARED
Vo 1 . 43. No . 3 Ma r c h, 2 01 3
文章编号: 1 0 0 1 - 5 0 7 8 ( 2 0 1 3 ) 0 3 - 0 3 1 1 - 0 4
・图像 与信号 处理 ・
基于 O p e n C V 的暗视 觉 图像 处 理 的研 究
基于OpenCV的机器视觉系统开发

基于OpenCV的机器视觉系统开发一、介绍随着计算机技术的不断发展,机器视觉技术已经成为了重要的技术领域之一。
机器视觉技术将摄像头、图像处理技术和机器学习技术相结合,可以实现对现实世界中视觉信号的理解和分析,从而用计算机来完成各种任务。
基于机器视觉技术的应用非常广泛,如自动驾驶、智能安防、工业自动化等。
而OpenCV作为一款免费的开源计算机视觉库,在机器视觉领域应用十分广泛,可用于图像和视频分析、目标检测、人脸识别、光流分析等多个领域。
本文将介绍基于OpenCV的机器视觉系统开发,包括OpenCV 的基础知识和机器视觉系统开发的流程和技巧。
二、OpenCV基础OpenCV是一个跨平台的计算机视觉库,被广泛应用于计算机视觉、机器视觉、机器人和图像处理等领域。
它提供了基于图像和视频处理的各种函数和算法,支持C++、Python等多种编程语言。
在开始使用OpenCV进行机器视觉系统开发之前,需要掌握OpenCV的一些基本知识:1. 图像读取和显示使用OpenCV首先要读取图像,可以使用cv::imread()函数读取图片文件,该函数返回一个Mat类型的矩阵,可以用它来处理读取到的图像数据。
读取图像后,可以使用cv::imshow()函数在窗口中显示图像。
2. 颜色空间转换在实际应用中,常常需要对图像进行颜色空间的转换。
OpenCV提供了灰度图像和彩色图像之间相互转换的函数。
常用的颜色空间包括RGB、HSV、YUV等。
3. 图像处理OpenCV提供了一系列的图像处理函数,如边缘检测、模糊滤镜、二值化等。
4. 目标检测OpenCV提供了一些目标检测的算法,如Haar Cascade、HOG+SVM和深度学习算法等。
这些算法可以用来检测人脸、车牌等目标。
5. 图像匹配OpenCV中提供了图像匹配的算法,可以用来搜索图像中的特定对象,如图像裁剪、标定等。
三、机器视觉系统开发流程机器视觉系统开发涉及的主要步骤包括:1. 需求分析在机器视觉系统开发之前,首先需要进行需求分析。
机器视觉及其应用实验报告
机器视觉及其应用实验报告机器视觉是一门利用计算机视觉技术进行图像处理和分析的学科。
通过机器视觉,计算机可以模拟人类感知视觉信息的过程,并基于此进行图像处理、目标检测、物体识别等应用。
本次实验的目标是研究机器视觉的基础概念及其应用,并通过Python编程实现一个实例。
本次实验基于Python语言和OpenCV库进行图像处理和分析。
首先,我们学习了机器视觉的基础概念,包括图像获取、图像处理和图像分析。
图像获取是指利用摄像头或其他设备获取图像数据。
图像处理是指对采集到的图像进行滤波、边缘检测、图像增强等操作,以便更好地识别和分析图像内容。
图像分析是指利用图像处理的结果进行目标检测、物体识别、运动跟踪等应用。
然后,在实验中我们使用Python编程语言和OpenCV库对图像数据进行处理和分析。
我们通过读取图像数据文件,加载图像数据,并利用OpenCV库的各种函数实现图像的滤波、边缘检测和图像增强等操作。
同时,我们还实现了简单的目标检测和运动跟踪算法。
具体来说,我们使用高斯滤波器对图像进行模糊处理,使用Sobel算子进行边缘检测,使用直方图均衡化方法进行图像增强,以及使用Haar级联检测器进行目标检测。
最后,我们通过实验结果验证了机器视觉的应用价值。
我们发现,通过图像处理和分析,计算机可以实现对图像的高效处理和分析,从而达到识别目标、检测运动等目的。
这些应用可以广泛应用于人脸识别、车牌识别、电子游戏等方面。
综上所述,本次实验研究了机器视觉的基础概念及其应用,并通过Python编程实现实例。
通过本次实验,我们对机器视觉有了更深入的了解,并通过实践掌握了图像处理和分析的相关技术。
基于OpenCV在移动端的图像处理技术

基于OpenCV在移动端的图像处理技术作者:刘贤辉来源:《电子技术与软件工程》2017年第09期摘要OpenCV是一个基于(开源)发行的跨平台计算机视觉库,本文主要介绍了opencv 的特点、组件结构以及在移动端开发环境Android studio中的环境搭建流程和相关的图像的边缘检测和直线检测的应用。
经过在移动端的开发应用,相信opencv技术在移动端的图像处理领域能有很大的作为。
【关键词】OpenCV视觉库图像处理 Android平台Opencv全称:Open Source Computer Vision Library,是一个可以移植到其他开发工具中的一个跨平台的图像处理视觉库,它由C++语言编写,主要有C++、C语言接口,为了能在手机等移动端更方便的进行图像处理,我们利用其JAVA接口将opencv视觉库添加到Android的开发工具中,实现了在移动端的图像处理功能。
1 opencv的特点(1)跨平台,有很好的移植性。
Opencv由跨平台的中高层API构成,可以运行在Linux、Windows和Mac OS操作系统上,该库有C++、C、Java接口,我们运用Java接口就可以将Opencv视觉库移植到Android studio开发工具中。
(2)免费、开源,与耗费很高的商业化工具(比如 MATLAB+Simulink)有很大的区别。
(3)高效、快速、使用方便。
Opencv视觉库具有强大的图像运算功能,API中有比较完善的处理函数,能够明显提高开发效率。
2 Opencv在Android studio中的环境搭建流程2.1 安装Java JDK需要完成JDK的下载、安装和环境配置的流程,安装完成后,要运行资源管理器输入Java Version来验证是否安装成功,若显示Java版本信息,则安装成功。
2.2 下载Android Studio开发工具并安装在Android Studio的中文社区下载最新的Android Studio开发工具(要包含Java SDK),并运行Android Studio,根据安装提示进行安装,并运行开发工具。
opencv 2 计算机视觉编程手册

opencv 2 计算机视觉编程手册摘要:1.OpenCV 简介2.OpenCV2 计算机视觉编程手册的内容3.手册的特点和适用对象4.手册的内容安排5.案例与实践正文:OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,用于开发各种计算机视觉和机器视觉应用程序。
它包含了大量的图像处理、分割和识别等算法,适用于各种场景。
对于那些想要学习OpenCV 的人来说,《OpenCV2 计算机视觉编程手册》是一个很好的资源。
《OpenCV2 计算机视觉编程手册》以案例的形式介绍OpenCV2.x 的新特性和C++新接口。
手册内容涵盖了OpenCV 的核心功能,如底层数据结构和算法函数,以及图像读写、用户界面操作等。
手册的特点在于很好地平衡了基础知识与进阶内容,要求读者具有基础的C++知识。
因此,该手册既适合想要学习计算机视觉的C++初学者,也适合专业的软件开发人员。
手册的内容安排如下:首先,介绍OpenCV 的基本概念和安装方法;然后,分别讲解OpenCV 的各个模块,如core、highgui、features2d、calib3d 和video 等;最后,通过实际案例和练习,帮助读者巩固所学知识。
通过学习《OpenCV2 计算机视觉编程手册》,读者可以掌握OpenCV 的基本用法和进阶技巧。
此外,手册还提供了最佳实践和建议,以便读者能够确定如何在开发环境中设置OpenCV 以及如何使用各种算法。
总之,《OpenCV2 计算机视觉编程手册》是一本实用性很强的教程,既可以作为高等院校计算机视觉课程的辅助教材,也可以作为图像处理和计算机视觉领域研究人员的参考手册。
基于OpenCV的除草机器人图像处理技术

1 系 统 总 体 方 案
系统 的主 要 功 能 是 针 对 除 草 机 器 人 上视 频 设 备 捕 获 的作 物 图像 进行 高 速 实 时 采 集 和 分 析 处 理 ,并 为 末端 执 行 机 构 提 供 定 位 数 据 。除 草 机 器 人 数 据 流 整 体 结构 图如 图 1所示 。
行 机 构 精 确 运 动 控 制 打 下 了 坚 实 基 础 。
关键词 :除草机器人 ;数字 图像处理 ;OpenCV;机器视觉
中 图 分 类 号 :TP249;S126
文 献标 识 码 :A
文 章 编 号 :1003—188X(2013)12—0162一O4
0 引 言
随着 计 算机 和 微 电子技 术 的 发 展 ,数 字 图像 处 理 技 术 可 以广 泛 地 应 用 于 工 业 、农 业 、航 空 航 天 和 医疗 等各 领 域 。在 众 多 的 计 算 机 视 觉 和 图 像 处 理 的软 件 包 中 ,较 为强 大 的 图像处 理 工 具 有 Matlab中的 图像 处 理 工具 包 ;Mathematica中 的数字 图像 处 理 软 件 包 ;Au. rora公 司 的 LEADTOOLS是 商 用 化 的 计 算 机 视 觉 包 , 其 包 括 了 图像 处 理 服 务 器 开 发 工 具 ;微 软 公 司 的 Vi— sion SDK是 以 C++源代 码 形 式 发 布 ,在 Windows环 境 下运 行 ,研 究 与开 发 图 像 分 析 与 处 理 的开 发 包 。 本 文 选取 OpenCV视觉 库 进 行 实 时 图 像 处 理 ,与 其 它 软 件 包相 比 ,其 优 势在 于 系 统 资 源 占用 少 、代 码 简 约 精 炼 、 运行 安 全 性好 以及 源代 码 完全 开 放 等 。
python+opencv实现机器视觉基础技术(2)(宽度测量,缺陷检测,医学处理)

python+opencv实现机器视觉基础技术(2)(宽度测量,缺陷检测,医学处理) 本篇博客接着讲解机器视觉的有关技术和知识。
包括宽度测量,缺陷检测,医学处理。
在传统的⾃动化⽣产中,对于尺⼨的测量,典型的⽅法就是千分尺、游标卡尺、塞尺等。
⽽这些测量⼿段测量精度低、速度慢,⽆法满⾜⼤规模的⾃动化⽣产需求。
基于机器视觉的尺⼨测量属于⾮接触式的测量,具有检测精度⾼、速度快、成本低、安装简便等优点。
可以检测零件的各种尺⼨,如长度、圆、⾓度、线弧等测量。
利⽤python+opencv⽅法可以进⾏宽度的测量。
步骤是先选取出⼀个矩形,然后进⾏阈值分割,再进⾏反⾊,边缘提取之后进⾏点的选择,输出坐标做出两条线段,根据线段进⾏矩形绘制,这样之后就可以计算两条直线之间的距离,也就是我们需要求得的宽度。
OpenCV是⼀个c++库,⽤于实时处理计算机视觉⽅⾯的问题,涵盖了很多计算机视觉领域的模块。
配合python调⽤c++库,可以很⽅便地进⾏宽度测量,实现要求。
步骤如下:import cv2import cv2 as cvimport numpy as npimport imutilsimg = cv2.imread("1.jpg") ⼿动地进⾏选取我们感兴趣的部分,然后截取出来。
img = imutils.resize(img, width=500)roi = cv2.selectROI(windowName="image1", img=img, showCrosshair=True, fromCenter=False)x, y, w, h = roicv2.rectangle(img=img, pt1=(x, y), pt2=(x + w, y + h), color=(0, 0, 255), thickness=2)s = img[y:y+h,x:x+w] 截取后会出现空⽩区域很多⿊⾊的情况,需要进⾏反⾊,⽤到的⽅法是255去除值。
opencv实现机器视觉检测和计数的方法

opencv实现机器视觉检测和计数的⽅法引⾔在机器视觉中,有时需要对产品进⾏检测和计数。
其难点⽆⾮是对于产品的图像分割。
由于之前⽹购的维⽣素⽚,有时候忘了今天有没有吃过,就想对瓶⼦⾥的药⽚计数...在学习opencv以后,希望实现对于维⽣素⽚分割计数算法。
本次实战在基于形态学的基础上⼜衍⽣出基于距离变换的分⽔岭算法,使其实现的效果更具普遍性。
基于形态学的维⽣素⽚检测和计数整体思路:读取图⽚形态学处理(在⼆值化前进⾏适度形态学处理,效果俱佳)⼆值化提取轮廓(进⾏药⽚分割)获取轮廓索引,并筛选所需要的轮廓画出轮廓,显⽰计数opencv实现:int main(int argc, char** argv){Mat src, src_binary,dst,src_distance;src = imread("D:/opencv练习图⽚/维⽣素⽚机器视觉检测和计数.png");imshow("原图⽚", src);Mat kernel = getStructuringElement(MORPH_RECT, Size(16, 16), Point(-1, -1));morphologyEx(src, dst, MORPH_OPEN, kernel);imshow("形态学",dst);cvtColor(dst, dst, COLOR_RGB2GRAY);threshold(dst, src_binary, 100, 255, THRESH_OTSU);imshow("⼆值化", src_binary);vector<vector<Point>> contours;findContours(src_binary, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(0, 0));RNG rng(12345);double area;Point2i PL;for (size_t i = 0; i < contours.size(); i++){area = contourArea(contours[i]);if (area < 500)continue;PL = contours[i].front();Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));drawContours(src, contours, i, color, 2, 8);putText(src, to_string(i), PL, FONT_HERSHEY_COMPLEX, 1, color, 2);}imshow("计数结果", src);waitKey(0);return 0;}效果展⽰:由上图可以看的,原图在经过形态学处理后,可以去除很多细节,简化后续的药⽚分割操作。
机器视觉实验报告书

一、实验名称基于机器视觉的物体识别与跟踪系统二、实验目的1. 了解机器视觉的基本原理和常用算法。
2. 掌握图像采集、预处理、特征提取、识别和跟踪的基本方法。
3. 培养动手能力和编程能力,提高实际应用机器视觉技术解决实际问题的能力。
三、实验内容及工作原理1. 实验内容本实验主要包括以下内容:(1)图像采集:使用摄像头采集待识别物体的图像。
(2)图像预处理:对采集到的图像进行灰度化、滤波、二值化等处理,提高图像质量。
(3)特征提取:提取图像中物体的特征,如颜色、形状、纹理等。
(4)物体识别:利用机器学习算法对提取的特征进行分类,实现物体识别。
(5)物体跟踪:根据识别结果,对物体进行实时跟踪。
2. 工作原理(1)图像采集:通过摄像头将物体图像转换为数字图像,然后存储到计算机中。
(2)图像预处理:对图像进行灰度化、滤波、二值化等处理,去除噪声,突出物体特征。
(3)特征提取:根据需要识别的物体类型,选择合适的特征提取方法。
如颜色特征、形状特征、纹理特征等。
(4)物体识别:利用机器学习算法对提取的特征进行分类,实现物体识别。
(5)物体跟踪:根据识别结果,实时更新物体位置,实现物体跟踪。
四、实验步骤1. 准备实验设备:摄像头、计算机、图像采集软件等。
2. 编写图像采集程序:使用OpenCV等图像处理库,实现图像采集功能。
3. 编写图像预处理程序:对采集到的图像进行灰度化、滤波、二值化等处理。
4. 编写特征提取程序:根据需要识别的物体类型,选择合适的特征提取方法。
5. 编写物体识别程序:利用机器学习算法对提取的特征进行分类。
6. 编写物体跟踪程序:根据识别结果,实时更新物体位置。
7. 实验验证:使用实际物体进行实验,验证系统性能。
五、实验结果与分析1. 实验结果本实验成功实现了基于机器视觉的物体识别与跟踪系统。
通过图像采集、预处理、特征提取、识别和跟踪等步骤,系统能够准确识别和跟踪物体。
2. 实验分析(1)图像预处理:图像预处理是提高物体识别准确率的关键步骤。
基于OpenCV的机器视觉图像处理算法设计与实现

基于OpenCV的机器视觉图像处理算法设计与实现一、引言随着人工智能技术的不断发展,机器视觉作为其中重要的一部分,扮演着越来越重要的角色。
而在机器视觉领域中,图像处理算法是至关重要的一环。
本文将介绍基于OpenCV的机器视觉图像处理算法设计与实现。
二、OpenCV简介OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法。
它支持多种编程语言,如C++、Python等,广泛应用于图像处理、目标识别、人脸识别等领域。
三、图像处理算法设计1. 图像读取与显示在使用OpenCV进行图像处理时,首先需要读取图像并显示出来。
可以使用OpenCV提供的函数cv2.imread()读取图像,cv2.imshow()显示图像。
2. 图像灰度化将彩色图像转换为灰度图像是很多图像处理算法的第一步。
可以使用cv2.cvtColor()函数将彩色图像转换为灰度图像。
3. 图像滤波图像滤波是一种常用的图像处理技术,可以去除噪声、平滑图像等。
OpenCV提供了多种滤波函数,如高斯滤波、中值滤波等。
4. 边缘检测边缘检测是图像处理中常用的技术,可以帮助我们找到图像中物体的边界。
OpenCV提供了多种边缘检测算法,如Sobel算子、Canny 边缘检测等。
5. 目标检测目标检测是机器视觉中的重要任务之一,可以通过训练模型来实现目标检测。
OpenCV结合深度学习框架如TensorFlow、PyTorch等,可以实现目标检测任务。
四、实现案例:人脸识别以人脸识别为例,介绍基于OpenCV的机器视觉图像处理算法设计与实现过程。
1. 数据准备首先需要准备人脸数据集,包括正样本和负样本。
正样本为包含人脸的图片,负样本为不包含人脸的图片。
2. 特征提取利用Haar特征进行人脸特征提取,通过训练得到人脸特征分类器。
3. 人脸检测使用训练好的分类器对输入图像进行人脸检测,得到人脸位置信息。
4. 人脸识别将检测到的人脸区域进行特征匹配,实现人脸识别功能。
如何在JAVA中进行机器视觉与图像识别

如何在JAVA中进行机器视觉与图像识别引言:随着人工智能的快速发展,机器视觉和图像识别技术在各个领域得到了广泛应用。
作为一种常用的编程语言,JAVA也提供了丰富的工具和库来支持机器视觉和图像识别任务。
本文将介绍如何在JAVA中进行机器视觉和图像识别,包括图像处理、特征提取、模式识别等方面的内容。
一、图像处理图像处理是机器视觉和图像识别的基础,它包括对图像进行预处理、增强和分析等步骤。
在JAVA中,可以使用OpenCV库来进行图像处理。
OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理函数和算法。
通过使用OpenCV,可以在JAVA中实现图像的读取、保存、缩放、旋转、滤波等操作。
二、特征提取特征提取是图像识别的关键步骤,它通过提取图像中的关键特征来进行分类和识别。
在JAVA中,可以使用SIFT(尺度不变特征变换)和SURF(加速稳健特征)等算法来进行特征提取。
这些算法能够有效地提取图像中的局部特征,并具有尺度不变性和旋转不变性等优点。
通过提取图像的特征,可以将其表示为一个向量或描述子,用于后续的分类和识别任务。
三、模式识别模式识别是机器视觉和图像识别的核心内容,它通过比较输入图像的特征向量和已知模式的特征向量来进行分类和识别。
在JAVA中,可以使用机器学习算法来进行模式识别。
常用的机器学习算法包括支持向量机(SVM)、人工神经网络(ANN)和决策树等。
这些算法能够从已知的训练样本中学习到模式的特征,并用于对新的图像进行分类和识别。
四、应用实例在JAVA中进行机器视觉和图像识别的应用非常广泛。
以下是一些常见的应用实例:1. 人脸识别:通过提取人脸特征和比对已知的人脸模式,实现对图像中人脸的自动识别和识别。
2. 文字识别:通过提取图像中的文字特征和比对已知的文字模式,实现对图像中文字的自动识别和转换。
3. 目标检测:通过提取目标特征和比对已知的目标模式,实现对图像中目标的自动检测和识别。
4. 图像分割:通过对图像进行分割和分析,实现对图像中不同区域的自动分割和识别。
基于OpenCV的机器视觉在智能手机中的应用

t es at h n a e n e e d dLi u . T eh n i n l e o n to o to p l ai n p o e u e b s do e CV s t d e n h m r o e b s d o mb d e n x p h a dsg a c g i n c n r l p i t r c d r a e n Op n r i a c o i s ida d u
r ai e . P r o t e e ii n sa tdm u i ly r t eh n g a g lr ar n t ed s u s n a dt ep o r m x a so el d z a f h c s tre scp a e ht a d s n l or u a l t c r o ic s i , n r g a e p n i n t d o wi h i t e yo y h o h i tra e a l me t r i e e t e t r s oc n r l h i e e t c i n . Th x e i n d c tdt a i se me t e e 1 n e f c sc n i e n ed f r n s e o to e f r n t s mp mo g u t t d a o e p rme t n i ae t h s y t m es h a . e i h t s t r t r c s i gn e , a dt e i p o e sn e d n v me t s t b e T i f a r f o t cl s o t l n a h n r o hp a t a da a t a d , me h mo e n a l . h s e t eo c n a t sc n r l gs r p o ea e t r ci l is u e o i m t b c a v n - r e n g a d i ma e e s r h n sb s d o n x mo eata t e mo eb o dp o p csf rd v lp n . n k s h ma t o e a e n Liu r t c i , t t p r v r r a r s e t o e eo me t Ke r s ma h n i in s r h n ; Op n y wo d : c i ev so ; ma t o e p e CV; e e d d L n x ARM mb d e i u ;
opencv项目实践

opencv项目实践(实用版)目录1.OpenCV 简介2.OpenCV 项目实践案例3.OpenCV 应用领域4.总结正文一、OpenCV 简介OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它包含了大量的图像处理和计算机视觉方面的算法。
OpenCV 的目的是为人工智能、机器视觉、图像处理等领域的研究人员和开发者提供一个通用且高效的平台。
OpenCV 的主要特点有:1.开源:OpenCV 遵循 BSD 许可,允许在开源和商业项目中自由使用。
2.跨平台:OpenCV 支持多种操作系统,包括 Windows、Linux、Mac OS 等。
3.多语言支持:OpenCV 提供了 C++、Python 和 Java 等多种编程语言的接口。
4.强大的功能:OpenCV 包含了图像处理、视频分析、特征提取、目标检测、跟踪、识别等多种功能。
二、OpenCV 项目实践案例以下是几个使用 OpenCV 进行实战的项目案例:1.长时间曝光摄影技术:通过使用 Python 和 OpenCV,可以实现长时间曝光摄影效果,将运动元素模糊,使静止元素更加清晰。
2.OpenCV 项目开发实战:本书介绍了与 OpenCV 移动应用程序相关的基本解决方案,包括搜索世界范围内的豪华建筑、利用姿势控制应用程序、车载后视摄像头和危险警告等。
3.opencv 笔记(CPP)——项目实战:本项目通过提取和处理图像,实现去除多余杂线的效果。
4.opencv--直方图:通过使用 OpenCV 计算图像的直方图,可以分析图像的亮度分布情况,为图像增强和滤波等处理提供依据。
三、OpenCV 应用领域OpenCV 在许多领域都有广泛的应用,包括:1.机器视觉:在工业生产线、智能监控等领域,OpenCV 可以帮助识别和检测物体,进行定位和测量等。
2.计算机视觉:在人脸识别、目标跟踪、图像识别等领域,OpenCV 提供了丰富的算法支持。
《2024年基于OpenCV的工业机器视觉软件开发》范文

《基于OpenCV的工业机器视觉软件开发》篇一一、引言随着科技的不断发展,工业自动化已成为现代制造业的重要组成部分。
在这个过程中,工业机器视觉技术发挥着越来越重要的作用。
OpenCV(开源计算机视觉库)作为一种强大的计算机视觉平台,为工业机器视觉软件开发提供了强有力的支持。
本文将探讨基于OpenCV的工业机器视觉软件开发的相关内容。
二、OpenCV简介OpenCV是一个开源的计算机视觉和机器学习软件库,包含了大量计算机视觉领域的算法和功能。
它被广泛应用于各种领域,包括工业自动化、医学影像处理、自动驾驶等。
在工业领域,OpenCV通过其强大的图像处理和机器学习功能,为机器视觉软件开发提供了丰富的工具和资源。
三、基于OpenCV的工业机器视觉软件开发1. 开发流程基于OpenCV的工业机器视觉软件开发流程主要包括需求分析、系统设计、图像预处理、特征提取、图像匹配与识别等步骤。
首先,根据工业生产的需求,进行详细的需求分析,明确软件的功能和性能要求。
然后,进行系统设计,包括硬件配置、软件架构设计等。
接着,对图像进行预处理,如去噪、增强等操作,以提高图像的质量。
然后,通过特征提取算法提取出图像中的特征信息。
最后,利用图像匹配与识别技术对特征信息进行比对和识别,实现工业生产过程中的自动化检测和控制。
2. 关键技术在基于OpenCV的工业机器视觉软件开发中,关键技术主要包括图像处理、特征提取和图像匹配与识别等。
图像处理技术包括图像去噪、增强、分割等操作,用于提高图像的质量和提取出有用的信息。
特征提取技术则通过算法从图像中提取出具有代表性的特征信息,如边缘、角点、纹理等。
图像匹配与识别技术则通过比对和识别特征信息,实现工业生产过程中的自动化检测和控制。
3. 开发实例以一个典型的工业生产场景为例,介绍基于OpenCV的机器视觉软件开发的应用。
在某个汽车制造厂的自动化生产线上,需要检测汽车零部件的尺寸和位置是否符合要求。
数字图像处理:基于OpenCVPython

这些应用场景涉及的图像处理技术复杂度较高,需要深入理解数字图像处理的理论和实践。通过 学习这些高级应用,读者将能够更好地理解数字图像处理在各个领域的应用价值和潜力。
《数字图像处理:基于OpenCVPython》这本书内容丰富、深入浅出,既适合初学者入门学习, 也适合有一定基础的读者进阶提高。通过学习这本书的内容,读者将能够全面掌握数字图像处理 的技术和应用,为进一步在相关领域开展研究和应用打下坚实的基础。
这本书介绍了数字图像处理的基本概念和基础知识,包括数字图像的形成、像素、颜色、图像的 数字化等。这些基础知识是进一步学习图像处理技术的关键,也是理解数字图像处理与其他领域 如计算机视觉、机器学习等相互关联的基础。
接下来,这本书深入探讨了数字图像处理的核心技术,包括图像滤波、边缘检测、形态学处理、 特征提取等。这些技术是实现各种复杂图像处理任务的关键,如目标检测、人脸识别、图像分类 等。通过学习这些技术,读者将能够掌握在实践中应用数字图像处理的方法和技巧。
这些只是《数字图像处理:基于OpenCVPython》一书中众多精彩摘录的一部 分。通过阅读本书,大家将深入了解数字图像处理的基本概念和技术,并掌握如 何使用OpenCV库进行各种图像处理操作。无论是初学者还是专业人士,这本书都 将为大家打开数字图像处理的大门,引领大家探索这一充满挑战和机遇的领域。
在《数字图像处理:基于OpenCVPython》的开篇,作者首先介绍了数字图像 处理的基本概念、发展历程和应用领域。这部分内容为读者提供了对数字图像处 理的宏观认识,有助于读者更好地理解后续章节的内容。
在这一部分,作者详细介绍了OpenCV和Python的基础知识,包括安装与配置、 基本操作等。对于初学者来说,这部分内容是不可或缺的,它为后续的实践操作 打下了坚实的基础。
opencv remap 实现原理
一、概述opencv是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉功能。
其中,remap是opencv中的一种图像处理函数,可以实现图像的几何变换,如放缩、旋转、平移等。
本文将介绍remap 函数的实现原理。
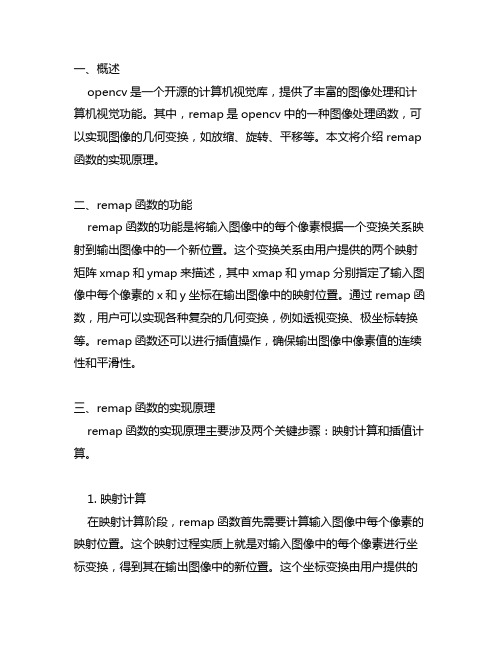
二、remap函数的功能remap函数的功能是将输入图像中的每个像素根据一个变换关系映射到输出图像中的一个新位置。
这个变换关系由用户提供的两个映射矩阵xmap和ymap来描述,其中xmap和ymap分别指定了输入图像中每个像素的x和y坐标在输出图像中的映射位置。
通过remap函数,用户可以实现各种复杂的几何变换,例如透视变换、极坐标转换等。
remap函数还可以进行插值操作,确保输出图像中像素值的连续性和平滑性。
三、remap函数的实现原理remap函数的实现原理主要涉及两个关键步骤:映射计算和插值计算。
1. 映射计算在映射计算阶段,remap函数首先需要计算输入图像中每个像素的映射位置。
这个映射过程实质上就是对输入图像中的每个像素进行坐标变换,得到其在输出图像中的新位置。
这个坐标变换由用户提供的xmap和ymap矩阵进行描述,remap函数通过这两个矩阵来计算输入图像中每个像素的映射位置。
2. 插值计算映射计算得到的映射位置是浮点型坐标值。
为了得到输出图像中的像素值,remap函数需要进行插值计算。
这个插值过程是为了根据输入图像中的像素值,推断其在输出图像中的值。
opencv中提供了多种插值算法,如最近邻插值、双线性插值、双三次插值等,用户可以根据实际需求选择合适的插值算法进行计算。
四、remap函数的使用示例下面是一个使用remap函数实现图像放缩的示例代码:```c++#include "opencv2/opencv.hpp"using namespace cv;int main(){Mat img = imread("input.jpg");Mat xmap, ymap;// 生成xmap和ymap矩阵,实现图像的放缩变换// ...Mat remap_img;// 使用remap函数进行图像放缩remap(img, remap_img, xmap, ymap, INTER_LINEAR);imshow("remap_img", remap_img);waitKey();return 0;}```在上面的示例代码中,首先读入输入图像,然后根据需求生成xmap和ymap矩阵,最后调用remap函数实现图像的放缩变换,并展示输出图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
王福斌1, 2 , 李迎燕3 , 刘 杰1 , 陈至坤2 ( 1. 东北大学机械工程与自动化学院, 辽宁 沈阳 110004; 2. 河北理工大学计算机与自动控制学院,
河北 唐山 063009; 3. 东北大学信息科学与工程学院, 辽宁 沈阳 110004)
# 55 #
右邻点灰度的加权差, 计算邻点与被考察的像素点 接近的权值大小.
对某一像素点 [i , j ] , 考虑其临近点的 Sobel 算 子模板, 如图 2 所示, 则像素点 [i , j ] 的偏导数可计 算如下:
¨f x = (a2 + 2a3 + a4 )- (a0 + 2a7 + a6 ) ( 1)
0 引言
数字图像处理技术是计算机视觉、机器视觉等
收稿日期: 2010-02-04 基金项目: 国家自然科学基金资助项目( 50775029)
# 54 #
技术实现的前提和基础. 图像处理一般为图像像素 级别上的操作, 高效、准确的图像处理技术, 可为图 像分析、图像理解提供可靠的保证. OpenCV 开源图 像处理算法库在 V C+ + 编译环境 下运行, 为数字 图像的处理、计算机视觉技术应用提供了极大的方 便[ 1 ] . 基于 OpenCV 的图像处理技术, 既可快速、可 靠地应用于实际工程中, 又可对一些图像处理算法 进行仿真分析.
a. 首先新建工程, 文件/ 新 建/ 工程/ w in32 Applicatio n 或者 w in32 conso le appiication.
b. 创 建 一 个 单 独 的 w orkspace ( cr eat e new w orkspace) , 也 可 以 将 新 的 项 目 加 入 到 当 前 的 w orkspace 中.
3. Colleg e of Infor mation Science and Eng ineer ing, N ortheastern U niver sity , Sheny ang 110004, China)
摘要: 阐述了在 VC+ + 下安装、构建 OpenCV 编译环境的方法及 OpenCV 应用程序框架的建立. 应用 OpenCV 视频图像采集技术, 在实验室中获取 3 幅图像, 在对数字图像处理技术进行理论分析的 基础上, 利用 OpenCV 实现了对采集图像截取感兴 趣的区域、对图像进行边缘检测、对图像进行角点探 测等技术.
1 O penCV 环境建立
1. 1 OpenCV 安装与环境变量配置 安 装 OpenCV 过 程 中, 要 注 意 选 中 ÷ Add \
OpenCV \ bin t o t he syst em PA T H "选项, 加入到环 境变量 PAT H 中. 安 装好的 OpenCV 路径 假设为 C: \ P rog ram F iles\ OpenCV.
gcy
5g
5y
根据卷积运算得 :
¨g( x , y ) = ¨f ( x , y ) á h( x , y )
= f (x , y ) á ¨h( x , y )
( 3)
由于多采用高斯函数作为平滑滤波器 , . Canny 边缘检测中
还要用到非极大点抑制方法限制梯度幅值, 解决图
像由于平滑后变得模糊而导致的边缘变宽问题. 最
后再用双阈值算法剔除假边缘, 并把断续的边缘连
接成轮廓.
图像边缘检测结果如图 3 所示, 其中图 3a 为采
用 Sobel 边缘检测算子; 图 3b, 图 3c 为采用 Canny
边缘检测算子检测结果.
# 56 #
图 3 图像边缘检测
3. 3 对图像进行角点提取 目标物的角点可用于实现视觉特征点提取、运
动估计和形状描述等. 图像中的角点处具有高的曲
率, 一般由图像边缘交点或边缘曲率较大的点形成. 角点中蕴含着目标几何形状信息, 对机器视觉的测
1 机械与电子22010( 6)
} 在上面新建的÷C+ + So urce f ile"中, 输入此程 序, 接入摄像头后, 即可获得视频图像, 实验室中采 集的 3 幅视频数字图像如图 1 所示.
图 1 采集到的 3 幅视频图像
3 O penCV 图像处理技术
OpenCV 数字图像 处理技 术主要 包括图 像变 换、滤波、边缘检测、直方图、几何变换和数学形态学 处理等. 可以很方便地对图像进行采集、底层处理, 为后续的模式识别、机器视觉应用提供高质量的图 像[ 4 ] . 3. 1 截取感兴趣的图像
Realization of Im ag e Process T echnology for Computer V ision Based on OpenCV
WANG Fu- bin1,2 , LI Ying- yan3 , LIU Jie1, CHEN Zh-i kun2 ( 1. Schoo l of M echanical Engineer ing and A utomation, N or theaster n U niv ersity , Shenyang 110004, China; 2. Colleg e of Computer and A ut omatic Contro l, Hebei P olytechnic U niv ersity , T ang shan 063009, China;
¨f y = (a0 + 2a1 + a2 )- (a6 + 2a5 + a4 )
图 2 Sobel 算子模板
So bel 算子为 s( x , y ) = | ¨f x | + | ¨f y | , ¨f x ,
¨f y 可分别用 2 个 3 @ 3 卷积核模板来实现 . 图像
中的每个像素点都用这 2 个模板做卷积 ,通过这 2
c. 点击 ÷nex t ", 之后 选 择, An empt y pro ject/ ok.
d. 新建工程 文件, 文件/ new / f iles, 选择 C+ + Source file/ ok.
1 机械与电子22010( 6)
e. 添 加工程配 置, 工 程/ 设 置/ 所 有配置, 选 中 ÷连接" 标签, 在÷对 象、模 块库" 中添 加÷ cx co re. lib cv. lib ml. lib cv aux . lib highg ui. lib cv cam. lib"模块 库, 至此完成了 O penCV 编程环境的构建[ 3] .
在 VC+ + 环境下选择菜单, T oo ls- > Opt io ns - > Directo ries, 设置 lib 路径, 选择 L ibrary files, 将所需要的 O penCV 库文件路径包含进来[ 2] . 1. 2 OpenCV 应用程序框架建立
创建简单的 OpenCV 应用程序, 可按如下步骤 进行:
关键词: 机器视觉; 数字图像处理; OpenCV; 视 频图像
中图分类号: T P751 文献标识码: A 文章编号: 1001- 2257( 2010) 06- 0054- 04 Abstract: Ex po und t he met hod of installing and building OpenCV com pilat io n environment based o n VC + + , fr am ew o rk est ablishm ent o f OpenCV applicat ion pr ogram. Acquires three imag es in laborat ory using OpenCV v ideo image acqu-i sitio n technolog y, o n t he basis o f t he t heory analysis t o digit al image pr ocessing t echnique, r ealized the t echno logy of int ercept ing reg ion of int erest image, edge det ect ion o f image, corner detect or o f image. Key words: machine vision; digit al imag e processing; OpenCV; video image
2 OpenC V 视频图像采集
使用 OpenCV 读入和显示图像, 相比 VC + + 而言要简单、方便 很多. 用 OpenCV 获取摄像 头拍 到的视频图像程序如下:
# include< cv. h> # include< highgui. h> # include< cxcore. h> void main( int arg c, char* argv [ ] ) { Cv Capt ure* capt ure= 0; if ( arg c= = 1| | ( argc= = 2& & str len( argv [ 1] ) = = 1& & isdig it( ar gv[ 1] [ 0] ) ) ) { capt ure = cvCaptureFro mCAM ( argc = = 2? ar gv[ 1] [ 0] - ø0ø: 0) ; } else if( ar gc= = 2) { capt ure= cvCapt ureF romAV I( arg v[ 1] ) ; } if ( ! capt ure) { ret urn; } IplImage * current _fram _rgb = cvCreat eImag e ( cv Size( 320, 240) , IP L_DEPT H _16U, 3) ; cvNam edWindow ( "w ", 0) ; w hile( capt ure) { current _f ram_r gb= cvQuery Fram e( capt ure) ; cvShow Image( "w ", current_fram_rgb) ; if ( cvWaitKey( 1) = = 27) { break; } } cvDest royAl lWindow s( ) ;