基于-单片机自动擦鞋机
基于PLC控制的多方位自动刷鞋机

v o l u me ,s t a b l e o p e r a t i o n,r e l i a b l e p e r f o r ma n c e a n d g o o d e f f o r t s . Ke y wo r d s : b us r h s h o e ma c h i n e ; a b e l t p u l l e y me c h a n i s m; c a m me c h a n i s m; c o mp r e h e n s i v e c o n t r o l ; P r o g r a mma b l e L o g i c
Om n i b e a r i n g Au t o ma t i c S h o e — Cl e a n i n g Ma c h i n e Ba s e d o n P LC
W ANG We n hu a
( D e p a r t m e n t o f M e c h a n i c a l a n d E l e c t r i c a l E n g i n e e r i n g , L a i w u V o c a t i o n a l a n d T e c h n i c a l C o l l e g e , L a i w u , S h a n d o n g 2 7 1 i 0 0 , C h i n a )
和 凸轮机构传动 带动毛刷运动 , 多方位清 洗鞋子 的 内部 和外表 面, 达到 刷 洗鞋子 的 目的。整个 洗刷过 程采 用三 菱 P L C 自动控制 。该设计结构巧妙 , 成本低 , 体积 小, 工作稳定 , 性 能可靠, 效果 良好。 关 键 词: 刷鞋机 ; 皮带轮机 构; 凸轮机构 ; 多方位 ; P L C控制 文献标 志码 : A 文章编号 : 1 0 0 5 — 2 8 9 5 ( 2 0 1 4 ) 0 3 - 0 0 7 7 - 0 3 中图分类号 : T H1 3 3 . 3 5
基于MSP430单片机的智能擦鞋系统设计

感 器检 测 、 电 机控 制技 术 、 语 音 输 出模 块 以 及 创 新 机 械 结 构 的 智 能 擦 鞋 系统 。 系统 结 合 近 似 标 准 的 R G B 色彩 空 间转 H S V 色彩 空 间 算 法 和 独特 的硬 件 结 构 , 实现 了全 方 位 自动 除 尘 、 智 能识 别 颜 色 、 对 应 颜 色鞋 油进 行 上 油 、 对 应 颜 色鞋 刷
Ab s t r a c t : I n o r d e r t o s o l v e t h e p r o b l e ms o f s h o e ol p i s h e r ,a s y s t e m b a s e d o n MS P 4 3 0 mi c me o n t r o l l e r i s d e s i g n e d .B y u s i n g T C S 2 3 0 e o l o r i me t e r s e n s o s ,e r l e c t r o —o p u c s e n s o r s ,mo t o r d r i v e r mo d u l e ,s o u n d s mo d u l e a n d a u n i q u e s t r u c t u r e .T h e s y s t e m h a s i mp r o v e d mo d e l s f om r RG B o t HS V c o l o r s p a c e a n d u n i ue q h a r d w a r e s t r u c t u r e, w h i l e i t ma k e t h e s y s t e m w h i c h h a s f u n c t i o n s o f a f u l l r a n g e o f c l e a r i n g d u s t , i n t e l l i g e n t l y d e t e c t c o l o r s , u s i n g t h e r e s u l t o f t h e c o l o r r e c o g n i d o n o t o i l nd a p o l i s h s h o e s nd a w i h t v o i c e p om r p t s f om r b e — g i n n i g n o t e n d .T h i s s y s t e m h s a c h ra a c t e i r s t i c s o f l o w ow p e r c o n s u mp t i o n ,e sy a t o o p e r a t e nd a ig h h s t a b i l i t y .
基于STM32单片机智能伺服型黑板擦

基于STM32单片机智能伺服型黑板擦随着科技的不断进步,智能化设备在我们的生活中已经变得越来越常见。
而在教育领域中,智能化设备也在不断地发挥着作用,提高了教学效率和质量。
今天我们要介绍的就是基于STM32单片机的智能伺服型黑板擦,它能够帮助老师更加轻松便捷地擦拭黑板,提高课堂效率。
下面让我们来详细了解一下这款智能黑板擦的设计和功能。
一、硬件设计1. 单片机选择在本设计中,选择了STM32单片机作为控制核心。
STM32是意法半导体公司推出的32位MCU产品系列,具有高性能、低功耗和丰富的外设资源。
它采用ARM Cortex-M内核,运行速度快,具有较高的性能,能够满足黑板擦控制系统对性能的要求。
2. 伺服电机黑板擦的移动是由伺服电机来控制的,在本设计中选择了一款小巧轻便但功率较大的伺服电机。
这款伺服电机具有稳定的控制性能和精准的位置控制能力,能够满足黑板擦的移动需求。
3. 传感器为了提高智能化程度,本设计中还加入了一些传感器,如光电传感器和超声波传感器。
光电传感器用于检测黑板擦的位置,超声波传感器用于检测黑板的位置,从而实现对黑板擦位置的自动调整。
4. 无线通信模块为了方便控制和监测黑板擦,设计中还加入了无线通信模块,可以通过手机或电脑对黑板擦进行远程控制和监测。
1. 控制算法在软件设计中,需要设计出一个稳定可靠的控制算法,来实现对黑板擦的精准控制。
这个算法需要考虑到伺服电机的特性和黑板擦的移动特点,尽量减小误差,提高精度。
2. 界面设计为了方便用户操作和监测黑板擦,设计了一个用户友好的界面,可以在手机或电脑上实时监测黑板擦的位置和状态,并且可以通过界面来控制黑板擦的移动。
三、功能特点1. 自动擦拭智能伺服型黑板擦可以根据预设的路径和时间自动擦拭整个黑板,老师只需要简单设置一下就可以让黑板擦自己完成擦拭工作,省去了反复擦拭的麻烦。
2. 自动调整位置通过传感器检测黑板和黑板擦的位置,智能伺服型黑板擦可以自动调整擦拭路径,确保每一块区域都能被擦拭到,提高了擦拭效率。
智能自动擦鞋机的设计

2015届分类号:TP368单位代码:10452毕业论文(设计)智能自动擦鞋机的设计姓名玉青学号XXXXXXXXXXXXX年级 XXXX级专业XXXXXXXXXXXXXXXXXX系(院) XXXXXXXX指导教师 XXXXXXXXX2015年 04月10日摘要本论文撰写的是智能自动擦鞋机的设计。
本次设计的系统的主控芯片使用的是51系列的AT89C51单片机,该系统还包括变压器、稳压集成电路7805、对射式红外光电开关、L293D芯片等。
这些硬件组成了系统的单片机最小系统模块、电源模块、红外感应模块、电机驱动模块。
其中的单片机最小系统模块是最重要的,单片机最小系统模块的用途是控制系统的正常运行,是全部系统的核心。
该系统的工作方式是通过红外感应模块检测信号,运用AT89C51单片机的运用和处理能力最终实现了擦鞋机传动的目的。
关键字:智能自动;擦鞋机;单片机;红外光电开关AbstractWriting of this paper is the design of intelligent automatic shoe machine. The design of the system of the main control chip is using 51 series of AT89C51 single chip microcomputer, the system also includes transformer, voltage regulator IC 7805, correlation type infrared electric switch, L293D chip, etc. The hardware composition of the system of single chip microcomputer minimum system module, power module, infrared sensor module, motor driver module. The single chip microcomputer minimum system module is one of the most important, single chip microcomputer minimum system module USES is the normal operation of the control system, is the core of the whole system. By the infrared sensing module and the system works by detecting signal, using the application of AT89C51 and processing power to achieve transmission with the shoe polisher.Key words:Intelligent automatic;Shoe machine;Single chip microcomputer;Infrared electric switch目录1绪论 (5)1.1 擦鞋机的概述 (5)1.2 本设计的主要工作 (5)2智能设自动擦鞋机的设计选定方案 (6)2.1 设计方案比较 (6)3智能自动擦鞋机的硬件部分设计 (6)3.1 硬件部分概述 (6)3.2单片机最小系统模块设计 (7)3.2.1 单片机的概述及应用 (7)3.2.2 单片机最小系统的设计 (7)3.3 电源模块设计 (8)3.4 红外感应模块设计 (10)3.4.1 红外概述及应用 (10)3.4.2红外感应模块的设计 (10)3.4.3红外感应模块的工作原理 (10)3.5 电机驱动模块设计 (11)4智能自动擦鞋机的程序编辑 (12)4.1程序设计 (12)5智能自动擦鞋机的实物焊接和调试 (13)5.1实物焊接 (13)5.2单片机最小系统模块调试 (14)5.3电源模块调试 (14)5.4 红外感应模块调试 (15)5.5电机驱动模块调试 (15)5.6软硬件联合调试 (16)5.7最终组装结果 (16)结束语 (16)参考文献 (17)附录 (18)附录1:系统总电路图 (18)附录2:源程序 (19)辞 (24)1绪论1.1 擦鞋机的概述随着生活水平的提高,一双光洁的皮鞋不再是奢侈品而是人们着装的日用品,衣着光鲜亮丽也就成为了人们的一种生活习惯。
基于IAP15系统的自动识别颜色的擦鞋机讲解
说明书摘要本发明公开了基于IAP15系统的自动识别颜色的擦鞋机,包括主支架、220V交流电机、步进电机、主轴、鞋油瓶、曲柄连杆机构、滚轴丝杆、颜色传感器支架、主轴轴承与控制系统,步进电机包括曲柄步进电机、丝杆步进电机与主轴步进电机。
控制系统由主控模块、红外传感模块、颜色传感模块、语音模块、电机模块组成,电机模块包括交流电机与步进电机,主控模块分别连接步进电机、红外传感模块、颜色传感模块、语音模块,主控模块还通过继电器连接交流电机。
本发明以IAP15系统为控制核心进行控制完成除尘、喷鞋油、刷鞋油的操作,可以实现颜色自动识别、自动完成操作,擦多种颜色不同的皮鞋,并且使用多种不同颜色的鞋油,且多种鞋油能够实现全自动切换。
摘要附图1.基于IAP15系统的自动识别颜色的擦鞋机,其特征在于,包括主支架、交流电机、步进电机、主轴、鞋油瓶、曲柄连杆机构、滚轴丝杆、颜色传感器支架、主轴轴承与控制系统,主轴轴承包括主轴轴承A与主轴轴承B;步进电机包括曲柄步进电机、丝杆步进电机与主轴步进电机,主轴步进电机安装在主支架上,主支架的一端通过主轴轴承A连接主轴,主轴的另一端通过主轴轴承B连接主支架,主轴上安装有交流电机、颜色传感器支架、曲柄连杆机构与曲柄步进电机,颜色传感器支架安装在主轴的上方,曲柄连杆机构、曲柄步进电机安装在主轴的下方,且曲柄连杆机构连接曲柄步进电机,曲柄连杆机构的下方与滚轴丝杆连接,滚轴丝杆的右侧连接丝杆步进电机,滚轴丝杆的下方安装有鞋油瓶,交流电机对称的安装在主轴上,且位于主轴轴承A与曲柄步进电机之间,交流电机上安装除尘毛刷与不同颜色的毛刷;控制系统由主控模块、红外传感模块、颜色传感模块、语音模块、电机模块组成,电机模块包括交流电机与步进电机,主控模块分别连接步进电机、红外传感模块、颜色传感模块、语音模块,主控模块还通过继电器连接交流电机;装置在工作时,把鞋伸进指定位置,位于箱体内壁的红外感应模块感应到有鞋伸进,自动启动除尘毛刷5秒,之后主轴步进电机旋转一定角度,使颜色传感模块位于鞋面正上方,检测到颜色后,经过主控模块处理控制主轴步进电机旋转一定角度,使滚轴丝杆旋转到鞋面正上方,由主控模块控制曲柄步进电机喷出相应颜色鞋油,之后主控模块根据颜色传感模块的数据控制交流电机旋转,使得相应颜色的毛刷旋转到鞋面的正上方,并开启控制毛刷的交流电机,直到鞋移走后交流电机停止运行;当红外传感模块检测到鞋移走后,主控模块控制主轴步进电机按原路径旋转回来,控制鞋油瓶移动的丝杆步进电机同样按原路径旋转至初始状态,从而使整机都处于初始状态,为下一次鞋的伸入做准备。
基才51单片机的鞋套机自动测试系统

otie yh esr fh p t i a, n a e n e t nrlinl te nls n de n o e inl ba db e no ei u g l adgt r g nt o c t g a,hna a iad u gmet fh ga n t s ot n s n h i o h mo r o o s ys j t s
Au o a i e tn y t m fs e c v r m a h n a e n 1 mi r c n r le t m tc t s i g s se o ho o e c i e b s d o 5 c o o t o lr
L i UO Je,P in AN La
a t ma i n . u o to s
Ke y wor :e ds mbe di y t m ;s n o ;mi r c nr le d ng s se esr c o o to lr;tsi y t m e tng s se
随 着 S T技 术 在 计 算 机 、 M 网络 通 信 、 费 电子 以 及 汽 车 消
Ab t a t T eman c n e t f h sp p r e in a es se sr cu ei d r m e c mb n t n o e u p rP n s r c : h i o t n i a e sg st t h y tm t t r sma efo t o i a i f h p e C a d ot d h t u h o t
结 果. 试 系统硬 件 部 分 以 5 测 1系列 S C1L 5 0 T 2 C 6 8单 片机 为核 心 , 试 系统 具 有 可 靠 性 高、 作 界 面 友 好 、 测 操 自动 化 程 度
基于MCS-51的自动清洁器的设计与开发

伴 随着人 们生 活 的节奏 逐渐 加快 , 自动化 家 用 电器成 为人 们制 , 中间则 为万 向轮 。左 右 两轮沿 主 体矩形 对 称 分布 ,万 向轮 的位 置 在过 中 心点与 左右 轮直 径 垂 直 直线 的一 端 ,属于 两轮 差动 的驱 动 形式 。两 个 步进 电机 通 过 齿 轮 传 动 带 动 左 右 两 边 的 驱 动 轮 。 由步进 电机 改变输 入 的脉冲 频率 进 行调速 , 转 向则通过 两 步进 电机 正反 转 ,此种 结构 为控 制 电机提 供 了便利 。
据 锁存 芯片进 行动 态数码 显 示 。
器 、工作 状态 检测 等 ,在单 片机 的控 制 下 ,几 个 模块 相互 协调 ,保 证 了 自动 清洁 器各 种 功能 的实 现 ,各模 块 间关系 如 图 3所示 。
T lc T 4I6 3
。 2 ∞
戮暇l潦 l
辫 一
1 戒 53 4 7
前景 。
X 轴
万 向 轮
图 2 自动清洁器主体驱动坐标表示 图
根 据 自动清 洁 器 的室 内环境 ,建 立 了一个 室 内地面 的 XY 坐标 图( 2, 坐标 原点 定义为 自 图 )将
动清 洁器 的位 置参 考 点 。清 洁 器 的转 动 中心 与坐
标 X 轴 的夹角 为 。令 自动清 洁器 的位 置矢量 表
1● ●●● ●●●j
,
b
物 ,4 、6号 传感器 则 用于检 测左 边界 ;5 、7号传
感器 用于 检测 右边 界 。
—.... 。 ... ..。 . . .l . . . . . . L . . .. . I .
那么 可 以得 到 自动清 洁器 的运动 方程 :
基于STM32单片机智能伺服型黑板擦

基于STM32单片机智能伺服型黑板擦
智能伺服型黑板擦是一种基于STM32单片机的智能设备。
它可以通过控制电机的转速和方向,实现对黑板进行高效的擦拭操作。
相比传统的手动黑板擦,智能伺服型黑板擦具有更高的效率、更便捷的操作、更稳定的性能等优点,因此被广泛应用于各种教育场景,如学校、会议厅等。
整个智能伺服型黑板擦系统由多个部件组成,包括STM32单片机、电机驱动模块、传感器等,各部件之间通过编程实现数据交互和控制。
首先,通过传感器可以获取黑板的当前状态信息,包括黑板的位置、面积、擦拭情况等。
然后,STM32单片机根据获取到的信息,控制电机进行相应的转动,以实现对黑板的擦拭操作。
此外,STM32单片机还可以通过WIFI模块与互联网进行连接,实现对智能伺服型黑板擦的遥控和监控。
在智能伺服型黑板擦的设计和实现过程中,STM32单片机起到了至关重要的作用。
它不仅集成了多种功能,如计时、计数、PWM调制等,还具有高性能和低功耗的特点。
这使得STM32单片机可以实现高效的控制和稳定的运行,并且可以扩展更多功能和模块。
总之,智能伺服型黑板擦是一种具有高效、便捷、稳定等优点的智能设备,它的核心技术在于STM32单片机的控制和管理。
随着科技的不断进步和应用的不断拓展,智能伺服型黑板擦将在各个教育场景中发挥更重要的作用,为教育事业的发展和进步做出更大的贡献。
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)课程设计
单片机自动清洁机器人设计(电路图+原理图+流程图+源程序)-课程设计单片机自动清洁机器人设计最近在电视看到一款能够遥控移动的吸尘器,圆形的和遥控汽车差不多,我感觉到如果再不把自己的想法写出来,自己的创意会被很多人实现,我几年前就想设计一款能够打扫卫生的机器人,直到看到电视里的那个东西,我意识到,我要自己做一个出来。
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
现在的智能清洁机器人通过软硬件的合理设计,使其能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
它的主要功能有: 1 能够自动熟悉地形,了解房间布局,感知自己的方位,记录和分析环境卫生状况,容易脏的地方多打扫,干净的地方少打扫,节省能源。
2能够自动补充能量。
当检测到电源不足时,自动找到电源,并充电。
充电结束自动专为待机状态。
3当垃圾装满后自动打包,并将垃圾放到主人指定的地点。
4能够检测主人是否在家,只有当主人不在家时,才出来打扫卫生,主人在家时机器人休息。
保证不影响主人的正常生活。
可行性分析:1应用超声波测距和滚轮定位就可以测到自己的位置,给据吸入垃圾量的多少,就可以分析出,那干净那里脏.2应用简单的空中加油技术就可以把自动充电搞定。
检测电源能量多少,和是否充满就更简单了.3垃圾打包只用简单的打包技术就可以解决.4机器人上装上热释红外探测器就知道主人在不在了..5剩下的功能,好多玩具里都有,只要把吸尘器和遥控车结合起来就搞定了1 系统整体方案设计1.1 制作清洁机器人的任务与要求:任务: 清洁机器人在场地上任意运动并吸尘,当遇到障碍物时,可自主避开障碍物绕道继续运动(轨迹由团队设定)。
基于单片机多功能清洁机器人设计

39. //count=100;while(count--){Delay(10);motor(-25,-25);}//后退1S
40. count=100;while(count--){Delay(25);motor(speed,-speed);}//右转90度
41. count=100;while(count--){Delay(12);motor(speed,speed);}//前进1S
17. uchar flag;
18. uint count,aaa;
19. char speed=52;
20. pwm_init();
21. led1 = 1;
22. led2 = 1;
23. led3 = 1;
33. led2 = 1;
34. led3 = 1;
基于S7-200 PLC对一款鞋子自动刷胶机控制系统的改进

1 鞋 子 自动 刷 胶 机原 有 的控 制 系 统
原有 的鞋 子 自动刷 胶 系统 是 采 用 单 片机 控 制 的 ,其 控
制系 统如 图 1所示 .
控制 系统 以单 片机 为核心 ,单 片机 接受 现场控 制 信号 ,
经过 处理 ,控制 步进 电机 的驱 动器 去驱 动步 进 电机工 作 ,同
该步 进 电动机 驱 动器 的 I 作 电流 输 为 1.7 A,r作 电压 为 DC 24 V.驱动 器为 2/4相 混合 型 步进 电机 驱 动器 ,集硬 件环 形脉 冲分 配器 与功 率 放大器 与 一体 ,在驱 动器 上有 一 个 4位 的拨 位 开关 (位于 图 3【fl有 上 角 的 小 窗 L】巾 )SW 1,SW 2.SW 3,SW 4,通 过 设 置 SW 1—4的 位 置 (00,01,10)可 以 得 到 同 的 步 距 角 ,分 别 埘 应 :0.9。,0.45。,0.225。.另外在 驱动 器上 还有 1个 1O位 接 【J的接 线端 口排 (位 于图 3 lIl左 上角 的端子排 ).分 别 用 于 与 可 编 程 控 制 器 和 步 进 电 动 机 连 接 I.
[关 键 词 ] s7 200P LC;自 动 刷 胶 机 ;步 进 电 机 (文 章 编 号 ] 1672—2027(2018)01—0047—03 (中 图 分 类 号 ] TP273 [文 献 标 识 码 ] A
基于AT89S52单片机自动擦鞋器的设计与实现

DI NG1 S : ETB TR0
RETI
・ 5 ・ 9
3. 电 机 正 反 转 控 制 3
I TO N 01 M o V . S A DI FLAG
LI P ZZ M
s u3 q NE A, 3 s uD : #0 H, s
LCALL SPLAY DI
置 擦 鞋 的速 度 。 因此 被 广 泛 应 用 。需要 特 别 说 明 的是 本 系统 使 用 的设 备 是 天 津亿 创 宏 达科 技 有 限 公 司 实
验板 。
本 文 设 计 的 自动 擦 鞋 器 可 以运 行 于 低 、 、 三级 速 度 , 且 电机 可 以正 反 转 全 面 擦 鞋 。 中 高 并
第 1 4卷
第 8期
天 津 职 业 院 校 联 合 学 报
J un l fTa j c t n ln tue o ra ini Vo a i a si t s o n o I t
No . 8 V01 1 . 4
Aug. 2 2 01
21 0 2年 8月
基于 A 8 S 2单 片机 T 95 自动擦鞋器的设计 与实现
领域 中。P WM 的一个优 点是从 处理器到被控系统信号都是数 字形式的 , 无需进行数模转换 。
本 文 中 通 过 定 时 器 TO来 实 现 电机 的 P WM 控 制 , 中断 服 务 子程 序 如 下 :
DI G SH N
一
0 /*定 时 器 定 时 1 : 0毫 秒 , 定 时 时 间 为 总
M oV TH0, #0 H D8
CL B L R F AG B c NEA, , I B:J #4 D NG1 M OV T F A #0 H O L G, 0
基于单片机的自洁装置的设计

基于单片机的自洁装置的设计一、引言自洁装置是一种能够自动清洁物体表面的装置,广泛应用于各个领域,例如家居、医疗设备、汽车等。
本文将介绍一种基于单片机的自洁装置的设计方案,通过控制装置的工作,实现物体表面的自动清洁。
二、设计原理基于单片机的自洁装置的设计原理是通过控制装置的工作,将清洁液体喷洒在物体表面,然后利用机械结构将清洁液体均匀分布,最后通过吸附和排水的方式将物体表面的污垢清洁干净。
三、硬件设计1. 单片机选择:选择一款适合的单片机作为控制核心,常用的有51系列单片机和STM32系列单片机等。
2. 传感器:选择合适的传感器来感知物体表面的污垢情况,常用的有光敏传感器、温湿度传感器等。
3. 液体喷洒系统:设计一个液体喷洒系统,包括液体储存罐、电磁阀、喷嘴等组成,通过单片机控制电磁阀的开关,控制清洁液体的喷洒。
4. 机械结构:设计一个机械结构,通过电机或气缸等驱动装置,将清洁液体均匀分布在物体表面。
5. 吸附和排水系统:设计一个吸附和排水系统,通过吸附装置将物体表面的污垢吸附,然后通过排水装置将吸附的污垢排出。
四、软件设计1. 传感器数据采集:通过单片机采集传感器的数据,判断物体表面的污垢情况。
2. 清洁液体喷洒控制:根据传感器数据的判断结果,控制液体喷洒系统的工作,将清洁液体喷洒在物体表面。
3. 机械结构控制:根据清洁液体喷洒的位置和范围,控制机械结构的工作,将清洁液体均匀分布在物体表面。
4. 吸附和排水控制:根据清洁液体的喷洒时间和物体表面的污垢情况,控制吸附和排水系统的工作,将污垢吸附并排出。
五、工作流程1. 传感器采集数据:通过光敏传感器采集物体表面的光照强度,判断是否有污垢。
2. 控制液体喷洒:当传感器检测到物体表面有污垢时,控制液体喷洒系统工作,喷洒清洁液体。
3. 控制机械结构:根据液体喷洒的位置和范围,控制机械结构工作,将清洁液体均匀分布在物体表面。
4. 吸附和排水:根据清洁液体的喷洒时间和物体表面的污垢情况,控制吸附和排水系统的工作,将污垢吸附并排出。
基于C51单片机的智能鞋的设计与实现
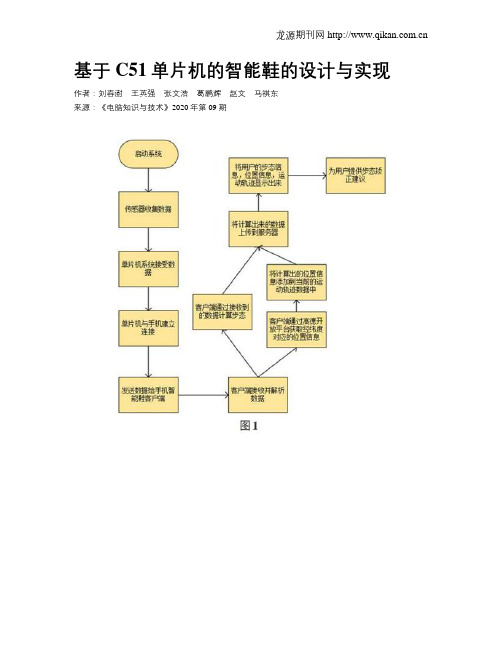
基于C51单片机的智能鞋的设计与实现作者:刘春澍王英强张文浩葛鹏辉赵文马祺东来源:《电脑知识与技术》2020年第09期摘要:近年来,儿童或老年痴呆患者走丢的新闻屡见不鲜。
儿童因为年龄小,天性好动好奇心强烈,容易被事物吸引,在与家长同行时没有跟随家长。
再加上家长疏于看护,就容易发生儿童走丢事件。
而患有老年痴呆的患者,在发病时自身没有意识,无法控制自身行为,容易发生走丢。
又因为老年痴呆发病时没有明显的症状,不像小孩走丢时哭闹会引人注意,所以在搜寻老人时会因为没有线索而增加搜索难度和时间。
走路迈八字步,低头含胸,脚掌拖地是现在很多人的走路习惯。
长期使用这些不标准的姿势走路,会引起身体关节的疼痛,下肢肌肉的过度紧张,严重者会出现很多身体关节疾病,同时也会影响个人的形象气质。
所以,我们决定开发一种智能鞋。
关键词:防走丢;健康;智能鞋;解决方案中图分类号:TP311 文献标识码:A文章编号:1009-3044(2020)09-0246-021 引言当今社会生活节奏快工作繁重,成年人没有太多时间与精力去看护家中的小孩和患病老人,再加上老人和小孩没有较强的自理能力,使得他们很容易发生危险。
同时现在的人们不太注意身体健康,因行走姿势不标准导致的各种身体不适,肌肉紧张和关节疼痛,这些问题极大的影响的人们的生活质量。
随着互联网+的发展,而鞋类又是现代生活的日常穿着用品,所以针对这两个问题提出了一条防走丢“智能鞋”的解决方案。
2 需求分析互联网+的时代已经到来,但在现在的正常生活中,还是有很多我们日常使用的物品没有实现互联网+。
例如现在的鞋类,它现在的功能仅仅只是保护足部,并没有实现如同智能手表和手机一样的智能化,有多种多样功能。
手机与智能手表很便捷,但是总有不方便携带的时候,例如运动时会影响我们活动,这就带来了极大的不便。
现在移动设备普及,定位设备普及,针对儿童走丢不方便寻找的问题,借助定位功能。
手机手表容易丢失,在寻找方面有极大的风险。
毕业论文(设计)基于单片机的智能清洁机器人的设计
1.2 研究意义
随着智能机器人的发展和科研技术的进步,清洁机器人的智能程度也越来越高。智能 化技术的发展速度越来越快,智能化也是未来社会的发展方向。作为现代智能化方向里一 项先进发明,智能清洁机器人已经和人们生产生活的联系越来越密切。
I
The design of intelligent cleaning robot
Abstract
In recent years, with the development of intelligent robots and the technological progress. The cleaning robot is more and more intelligent,and intelligent is the sign of the development of cleaning robot.As the development trend of modern intelligent robot,it has become the research direction of designers.At the same time, intelligent cleaning robot is direction of development in the future.
Keywords: Intelligent cleaning robot, MCU , obstacle avoidance, infrared, vacuum cleaner
基于-单片机自动擦鞋机

基于单片机的自动擦鞋机序言随着信息技术的普及和发展,红外技术得到了迅猛发展。
红外探测/控制技术已渗透到国民经济的各行各业和人们日常生活的方方面面,在工业自动化、生产过程控制、信息采集和处理、通信、红外制导、激光武器、电子对抗、红外育种、红外加热、材料加工和处理、安全防、家用电器控制及日常生活(如自动擦鞋机、节水节能控制、红外医疗与美容、智能玩具、空调等)各个方面都得到了广泛的应用。
[13]单片微型计算机又称嵌入式微控制器,是20世纪70年代中期发展起来的一种大规模集成电路器件。
它在一块芯片集成了计算机的各种功能部件,构成一种单片式的微型计算机。
20世纪80年代以来,国际上单片机的发展很快,世界上著名的半导体厂商都有它的单片机系列产品,单片机的应用不断深入到国民经济各个领域,处处可以看到电脑型的电子产品。
单片机的应用技术是一项新型的软硬件工程技术,其涵随着单片机的发展而发展。
[7] 在现实生活中,擦鞋是每家每户生活中必不可少的一部分,但擦鞋又是一件比较烦琐的事情。
每当出门时看见鞋子上有很多灰尘,比较脏,如果只是稍微擦一下又擦不干净,跟没擦差不多,但如果仔仔细细的擦一下的话又很费时间,而且还容易弄脏自己的手和衣物。
如何让擦鞋变得既省时又省力呢?基于单片机的自动擦鞋机就能为我们解决这个问题。
本擦鞋机是采用红外线发射、接收、集成电路控制的新一代电器产品,设计合理、操作简便。
伸脚既开,抽脚延时15秒关闭,全自动工作。
还有语音提示,数码管显示时间,甚至还可以听取音乐。
您要做的就是把脚伸进擦鞋机,其他的事情全部由它来完成。
适合企事业单位办公室、家庭等小型服务场所。
如果鞋已久未护理、干裂、泛白,可把脚移到油嘴处,用鞋把嘴滚珠轻轻托起,油便自行注到鞋面,涂多少自定,再放到抛光轮上抛光即可。
鞋离开后20秒自动停止工作。
1. 进门免戴鞋套、不用换拖鞋、将尘土和病毒拒之门外 2. 快速方便的清洗鞋底、鞋面、侧面 3. 解决雨天鞋底泥水带入室的烦恼 4. 解决了购买大量拖鞋而占用室空间的问题 5. 减轻了清洁地板的劳动强度 6. 避免换鞋处各种鞋子发出的呛人气味,改善室空气质量。
基于STC89C51单片机的智能鞋的设计与开发
15
科技风 2019年 2月
科技创新 DOI:10.19392/j.cnki.16717341.201905013
基于 STC89C51单片机的智能鞋的设计与开发
苏立鑫 王艺凝 虞佳敏 慧
吉林工商学院 吉林长春 130507
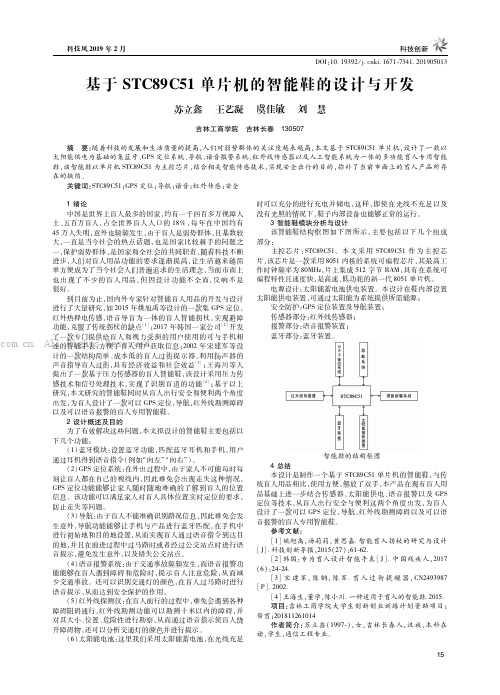
摘 要:随着科技的发展和生活质量的提高,人们对弱势群体的关注度越来越高,本文基于 STC89C51单片机,设计了一款以 太阳能供电为基础的集蓝牙、GPS定位系统、导航、语音报警系统、红外线传感器以及人工智能系统为一体的多功能盲人专用智能 鞋,该智能鞋以单片机 STC89C51为主控芯片,结合相关智能传感技术,实现安全出行的目的,弥补了当前市面上的盲人产品所存 在的缺陷。
. Al连l的R智i能g手h表ts,方R便e了s盲er人v用e户d.获取信息;2002年宋建军等设
计的一款结构简单、成本低的盲人过街提示器,利用扬声器的 声音指导盲人过街,具有经济效益和社会效益[3];王海川等人 提出了一款基于压力传感器的盲人智能鞋,该设计采用压力传 感技术和信号处理技术,实现了识别盲道的功能[4];基于以上 研究,本文研究的智能鞋同时从盲人出行安全和便利两个角度 出发,为盲人设计了一款可以 GPS定位,导航,红外线勘测障碍 以及可以语音报警的盲人专用智能鞋。
时可以充分的进行充电并储电,这样,即使在光线不充足以及 没有光照的情况下,鞋子内部设备也能够正常的运行。
3智能鞋模块分析与设计 该智能鞋结 构 框 图 如 下 图 所 示,主 要 包 括 以 下 几 个 组 成 部分: 主控芯 片:STC89C51。本 文 采 用 STC89C51作 为 主 控 芯 片,该芯片是一款采用 8051内核的系统可编程芯片,其最高工 作时钟频率为 80MHz,片上集成 512字节 RAM,具有在系统可 编程特性且速度快,是高速、低功耗的新一代 8051单片机。 电源设计:太阳能蓄电池供电装置。本设计在鞋内部设置 太阳能供电装置,可通过太阳能为系统提供所需能源; 安全防护:GPS定位装置及导航装置; 传感器部分:红外线传感器; 报警部分:语音报警装置; 蓝牙部分:蓝牙装置。
智能自动擦鞋机的设计
2015届分类号:TP368单位代码:10452毕业论文(设计)智能自动擦鞋机的设计姓名玉青学号XXXXXXXXXXXXX年级XXXX级专业XXXXXXXXXXXXXXXXXX系(院)XXXXXXXX指导教师XXXXXXXXX2015年04月10日摘要本论文撰写的是智能自动擦鞋机的设计。
本次设计的系统的主控芯片使用的是51系列的AT89C51单片机,该系统还包括变压器、稳压集成电路7805、对射式红外光电开关、L293D芯片等。
这些硬件组成了系统的单片机最小系统模块、电源模块、红外感应模块、电机驱动模块。
其中的单片机最小系统模块是最重要的,单片机最小系统模块的用途是控制系统的正常运行,是全部系统的核心。
该系统的工作方式是通过红外感应模块检测信号,运用AT89C51单片机的运用和处理能力最终实现了擦鞋机传动的目的。
关键字:智能自动;擦鞋机;单片机;红外光电开关AbstractWriting of this paper is the design of intelligent automatic shoe machine. The design of the system of the main control chip is using 51 series of AT89C51 single chip microputer, the system also includes transformer, voltage regulator IC 7805, correlation type infrared electric switch, L293D chip, etc. The hardware position of the system of single chip microputer minimum system module, power module, infrared sensor module, motor driver module. The single chip microputer minimum system module is one of the most important, single chip microputer minimum system module USES is the normal operation of the control system, is the core of the whole system. By the infrared sensing module and the system works by detecting signal, using the application of AT89C51 and processing power to achieve transmission with the shoe polisher.Key words: Intelligent automatic;Shoe machine;Single chip microputer;Infrared electric switch目录1绪论51.1 擦鞋机的概述51.2 本设计的主要工作62智能设自动擦鞋机的设计选定方案62.1 设计方案比较63智能自动擦鞋机的硬件部分设计73.1 硬件部分概述73.2单片机最小系统模块设计83.2.1 单片机的概述及应用83.2.2 单片机最小系统的设计83.3 电源模块设计93.4 红外感应模块设计103.4.1 红外概述及应用103.4.2红外感应模块的设计103.4.3红外感应模块的工作原理113.5 电机驱动模块设计124智能自动擦鞋机的程序编辑134.1程序设计135智能自动擦鞋机的实物焊接和调试145.1实物焊接145.2单片机最小系统模块调试145.3电源模块调试155.4 红外感应模块调试155.5电机驱动模块调试155.6软硬件联合调试165.7最终组装结果16结束语17参考文献19附录20附录1:系统总电路图20附录2:源程序20辞261绪论1.1 擦鞋机的概述随着生活水平的提高,一双光洁的皮鞋不再是奢侈品而是人们着装的日用品,衣着光鲜亮丽也就成为了人们的一种生活习惯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的自动擦鞋机序言随着信息技术的普及和发展,红外技术得到了迅猛发展。
红外探测/控制技术已渗透到国民经济的各行各业和人们日常生活的方方面面,在工业自动化、生产过程控制、信息采集和处理、通信、红外制导、激光武器、电子对抗、红外育种、红外加热、材料加工和处理、安全防、家用电器控制及日常生活(如自动擦鞋机、节水节能控制、红外医疗与美容、智能玩具、空调等)各个方面都得到了广泛的应用。
[13]单片微型计算机又称嵌入式微控制器,是20世纪70年代中期发展起来的一种大规模集成电路器件。
它在一块芯片集成了计算机的各种功能部件,构成一种单片式的微型计算机。
20世纪80年代以来,国际上单片机的发展很快,世界上著名的半导体厂商都有它的单片机系列产品,单片机的应用不断深入到国民经济各个领域,处处可以看到电脑型的电子产品。
单片机的应用技术是一项新型的软硬件工程技术,其涵随着单片机的发展而发展。
[7] 在现实生活中,擦鞋是每家每户生活中必不可少的一部分,但擦鞋又是一件比较烦琐的事情。
每当出门时看见鞋子上有很多灰尘,比较脏,如果只是稍微擦一下又擦不干净,跟没擦差不多,但如果仔仔细细的擦一下的话又很费时间,而且还容易弄脏自己的手和衣物。
如何让擦鞋变得既省时又省力呢?基于单片机的自动擦鞋机就能为我们解决这个问题。
本擦鞋机是采用红外线发射、接收、集成电路控制的新一代电器产品,设计合理、操作简便。
伸脚既开,抽脚延时15秒关闭,全自动工作。
还有语音提示,数码管显示时间,甚至还可以听取音乐。
您要做的就是把脚伸进擦鞋机,其他的事情全部由它来完成。
适合企事业单位办公室、家庭等小型服务场所。
如果鞋已久未护理、干裂、泛白,可把脚移到油嘴处,用鞋把嘴滚珠轻轻托起,油便自行注到鞋面,涂多少自定,再放到抛光轮上抛光即可。
鞋离开后20秒自动停止工作。
1. 进门免戴鞋套、不用换拖鞋、将尘土和病毒拒之门外 2. 快速方便的清洗鞋底、鞋面、侧面 3. 解决雨天鞋底泥水带入室的烦恼 4. 解决了购买大量拖鞋而占用室空间的问题 5. 减轻了清洁地板的劳动强度 6. 避免换鞋处各种鞋子发出的呛人气味,改善室空气质量。
本设计应用单片机设计一个自动擦鞋机。
基于单片机的自动擦鞋机的硬件构成包括变压器、稳压集成模块7805、红外发射与接收管、AT89C2051芯片、L293D芯片等组成的电源电路、红外发射与接收电路、单片机系统控制电路、电机驱动电路和显示电路。
单片机系统控制电路用来控制整个系统的正常运行,是整个系统的核心。
该系统主要通过红外发射与接收电路检测信号,运用单片机的运算和处理能力来实现擦鞋机的转动,并通过显示电路显示其工作状态。
第1章擦鞋机的概述1.1结构本设计是由单片机系统控制电路、电源电路、红外发射与接收电路、电机驱动电路、显示电路和外壳组成。
本设计的结构实物图如图1-1所示。
图1-1 实物图1.2原理基于单片机的自动擦鞋机主要由输入、控制系统和输出三部分组成。
输入部分主要包括电源电路和红外发射与接收电路;控制系统部分主要有单片机和外围电路(上电自动复位电路、时钟电路、显示电路)组成,该部分是整个系统电路的核心;输出部分由驱动电路组成。
基于单片机的自动擦鞋机主要通过红外发射与接收电路检测信号,运用单片机的运算和处理能力来实现擦鞋机的转动,并通过显示电路显示其工作状态。
该系统电路的一般框图如图1-2所示。
图1-2 一般框图1.3设计方案方案一:采用各类数字电路来组成擦鞋机的控制系统,对外围红外信号进行处理。
本方案电路复杂,灵活性不高,效率低,不利于擦鞋机智能化的扩展,对各路信号处理比较困难。
方案二:采用AT89C2051单片机来作为整机的控制单元。
红外线探头采用市面上通用的发射管以及接收管组成简易的遮挡式红外发射与接收电路,将感应到的红外信号通过三极管的工作状态转化为数字信号送到单片机系统处理。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。
比较以上两种方案的优缺点,方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采用方案二来实现。
第2章基于单片机的自动擦鞋机的硬件电路设计2.1硬件电路概述基于单片机的自动擦鞋机是用红外线发射与接收电路进行启动的,通过单片机技术编写出必要的软件程序进行控制,形成单片机系统控制电路。
再由其控制电路对电机驱动电路进行控制,驱动两个电机的转动,同时显示电路显示擦鞋机的运行状态,灯亮则擦鞋机正常工作。
鞋子擦好后将鞋子拿出来则再由红外线发射与接收电路进行红外线感应,离开15秒后电机自动停止转动,显示电路显示灯灭则擦鞋机停止工作。
硬件电路的框图如图2-1所示。
图2-1 硬件电路的框图2.2各模块设计2.2.1电源电路低压线性稳压电路基本上由四部分组成:变压器降压、二极管或桥堆整流、电容或电感滤波、三端稳压块(或稳压电路)稳压,他们之间的组合则可构成一个最基本的,也是最可靠的线性电源电路。
电源电路原理图如图2-2所示。
LED图2-2 电源电路原理图1、变压器一般的变压器具有一个初级绕组、一个或多个次级绕组,线圈绕在铁心上。
给初级绕组加上交流电,由于电磁感应的原理,在次级绕组上则有电压输出。
在给变压器的初级绕组通以交流电时,绕组周围会产生磁场,尽管有铁心给绝大部分磁力线构成磁路,但仍有一些磁力线散布在变压器附近的一定空间围。
这些磁力线会对附近的电路形成一定的磁干扰,所以一般要给变压器加上屏蔽壳。
屏蔽壳不仅可防止变压器干扰其他电器,同时亦可防止其他杂散磁场干扰变压器的正常工作。
[15]2、整流电路整流电路是由四个型号为IN4007的整流二极管构成桥式整流电路而形成的。
它的作用是将经变压器降压后的交变电压通过二极管变为单向的脉动电压[15]。
3、滤波电路滤波电路的作用就是降低整流后输出电压中的脉动成分使其变为脉动直流电压。
该滤波电路是电容滤波电路。
利用电抗元件在电路中有储能的作用,滤去电源中的脉动成分,从而得到比较平滑的电源波形。
负载平均电压V L升高,纹波(交流成分)减小,且R L C越大,电容放电速率越慢,则负载电压中的纹波成分越小,负载平均电压越高。
为了得到平滑的负载电压,一般取T(2-1)τd = R L C ≥(3~5)2式中T为电源交流电压的周期。
在整流电路的阻不太大(几欧)和放电时间满足上式的关系时,电容滤波电路的负载电压V L与V2的关系约为V L =(1.1~1.2)V2 (2-2)总之,电容滤波电路简单,负载直流电压V L较高,纹波也较小,它的缺点是输出特性较差,故适用于负载电压较高,负载变动不大的场合。
[15]4、稳压电路电源通过降压、整流、滤波后,要提供给电子器件或芯片工作的电源,保证其正常的工作和精确的取样,还需经过稳压,滤波。
为了保证稳压器正常工作,必须保证具有一定的输入、输出电压差。
如果输出确定,则输入必须保证大于一定值。
若输入太低,则可能导致稳压器稳压性能不好,而且输出电压的纹波也会过大。
在稳压器的运行过程中,由于它要消耗一定的功率,所以一般而言,发热比较严重,在负载较大时,需使用散热片帮助其有效散热。
[15]2.2.2红外发射与接收电路1、红外概述红外技术是现代物理和电子学的一部分,它包括电磁波红外波段的辐射、传播和波形记录及其在科学、技术、国民经济和军事中的实际应用。
红外技术是现代无线电电子学和物理学中的重要方向之一,它对于促进国民经济各部门采用先进技术以及加强基础科学和应用科学的研究都有极其重要的作用。
今天,红外技术正被广泛地用于解决国民经济中的各种不同的问题。
[1]采用近红外线作为红外的光源,主要基于如下理由:(1)一般的接收用的红外光电二极管、光敏三极管大都采用硅(SI)半导体材料制作而成的,这类管的接收峰值波长为780~1550nm,即管子对波长为780~1550nm的红外光的探测灵敏度最高。
[3](2)红外线的发射器件,尤其是采用GaAs、AlGaAs或GalnAsp等半导体材料制作的红外发光二极管,其发射波长在880nm~1700nm围,这与硅(SI)光电接收器件的响应波长相匹配,使探测灵敏度高,工作效率高。
[3]2、红外发射与接收电路的组成红外发射与接收电路主要组成部分有:红外发射电路和红外光电转换电路。
(1)红外发射电路发射部分的发射元件为红外发光二极管,它发出的是红外线而不是可见光。
常用的红外发光二极管发出的红外线波长为940nm左右,外形与普通φ5mm发光二极管相同,只是颜色不同。
一般有透明、黑色和深蓝色等三种。
判断红外发光二极管的好坏与判断普通二极管一样的方法。
单只红外发光二极管的发射功率约100mW。
红外发光二极管的发光效率需用专用仪器测定,而业余条件下,只能凭经验用拉距法进行粗略判定。
[13](2)红外光电转换电路接收电路的红外接收管是一种光敏二极管,红外接收二极管一般有圆形和方形两种。
光敏二极管是光电转换半导体器件,与光敏电阻器相比具有灵敏度高、高频性能好,可靠性好、体积小、使用方便等优点。
光敏二极管和普通二极管相比虽然都属于单向导电的非线性半导体器件,但在结构上有其特殊的地方。
光敏二极管使用时要反向接入电路中,即正极接电源负极,负极接电源正极。
[3]3、红外发射与接收电路的工作原理(1)电路原理图电路原理图如图2-3所示。
图2-3 红外发射与接收电路的原理图(2)工作原理红外发光二极管VD1和RP1组成红外发光电路,可调电阻RP1用作降压限流,通过调节RP1的大小,使红外发光二极管VD1的工作电流限制在90mA之,以免发光管电流过大而烧毁,并保证其正常工作。
VD2为红外光敏二极管,它和R2组成光电转换器,在红外光发射与接收间的红外线光路不被遮挡时,VD2将VD1发来的红外光信号转换成电信号,使VD2呈低阻抗(约几千欧),使A点的电压小于等于0.35伏,VT呈截止状态,B点呈高电平。
在红外光发射与接收间的红外线光路被遮挡时,VD2接收不到VD1发来的红外光,VD2呈高阻(暗阻大于或等于500 kΩ)使A点电位升高,VT饱和导通,B点电位小于等于0.4伏。
[14]2.2.3单片机系统控制电路1、单片机的概述现在的计算机都大规模集成电路计算机,具有功能强、结构紧凑、系统可靠等特性。
随着半导体技术的发展,能够在一个硅片上制作几百万个晶体管,于是出现了大规模集成电路的中央处理器——微处理器(up),以及大容量的半导体存贮器,通用或专用输入/输出(I/O)接口电路,包含多种类型I/O的综合外围电路,由这些大规模集成电路组成各种类型的微型计算机。
[4](1)单片机性能特点单片机的性能特点有:高集成度,在平方毫米级别的芯片上可制造上万个晶体管电路;结构紧凑,可靠性高;功耗小,成本低[11]。