操作系统-课程设计报告-处理机调度程序
操作系统课程设计报告-进程调度的模拟实现

操作系统课程设计报告专业计算机科学与技术学生姓名班级学号指导教师完成日期博雅学院ﻬ题目:进程调度的模拟实现的模拟实现一、设计目的本课程设计是学习完“操作系统原理”课程后进行的一次全面的综合训练,通过课程设计,更好地掌握操作系统的原理及实现方法,加深对操作系统基础理论和重要算法的理解,加强学生的动手能力。
在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念.二、设计内容1)概述选择一个调度算法,实现处理机调度。
设计要求:1)进程调度算法包括:时间片轮转法,短作业优先算法,动态优先级算法。
2)可选择进程数量3)本程序包括三种算法,用C或C++语言实现,执行时在主界面选择算法(可用函数实现),进入子页面后输入进程数,(运行时间,优先数由随机函数产生),执行,显示结果。
调度时总是选取优先数最大的进程优先运行2.每个进程的优先数,运行时间,由程序任意指定.3.为了调度方便,把进程按给定优先级(动态优先级算法中)从小到大排成一个队列。
按给定运行时间(短作业优先)从小到大排成一个队列用一个变量作为队首指针,指向队列的第一个进程。
4.处理机调度总是选队首进程运行。
由于本实验是模拟处理机调度,所以被选中的进程并不实际的启动运行,而是执行:优先数-1(动态优先级算法中)要求运行时间-1来模拟进程的一次运行。
5.进程运行一次后,若要求运行时间不等于0,则再将它加入队列(动态优先级算法中:按优先数大小插入.),且改变队首指针:若要求运行时间=0,则把它的状态改为完成(C)状态,且退出队列。
(5)对于遇到优先数一致的情况,采用FIFO策略解决.3。
概要设计(1)本程序用两种算法对五个进程进行调度,每个进程可有三个状态,并假设初始状态为就绪状态。
操作系统实验之处理机调度实验报告
操作系统实验之处理机调度实验报告一、实验目的处理机调度是操作系统中的核心功能之一,本次实验的主要目的是通过模拟不同的处理机调度算法,深入理解操作系统对处理机资源的分配和管理策略,比较不同调度算法的性能差异,并观察它们在不同负载情况下的表现。
二、实验环境本次实验使用的操作系统为 Windows 10,编程语言为 Python 38。
实验中使用了 Python 的相关库,如`numpy`、`matplotlib`等,用于数据生成、计算和图形绘制。
三、实验原理1、先来先服务(FCFS)调度算法先来先服务算法按照作业到达的先后顺序进行调度。
先到达的作业先被服务,直到完成或阻塞,然后再处理下一个到达的作业。
2、短作业优先(SJF)调度算法短作业优先算法选择预计运行时间最短的作业先执行。
这种算法可以有效地减少作业的平均等待时间,但可能导致长作业长时间等待。
3、时间片轮转(RR)调度算法时间片轮转算法将处理机的时间分成固定长度的时间片,每个作业轮流获得一个时间片的处理时间。
当时间片用完后,如果作业还未完成,则将其放入就绪队列的末尾等待下一轮调度。
4、优先级调度算法优先级调度算法为每个作业分配一个优先级,优先级高的作业先被执行。
优先级可以根据作业的性质、紧急程度等因素来确定。
四、实验内容与步骤1、数据生成首先,生成一组模拟的作业,包括作业的到达时间、预计运行时间和优先级等信息。
为了使实验结果更具代表性,生成了不同规模和特征的作业集合。
2、算法实现分别实现了先来先服务、短作业优先、时间片轮转和优先级调度这四种算法。
在实现过程中,严格按照算法的定义和规则进行处理机的分配和调度。
3、性能评估指标定义了以下性能评估指标来比较不同调度算法的效果:平均等待时间:作业在就绪队列中的等待时间的平均值。
平均周转时间:作业从到达系统到完成的时间间隔的平均值。
系统吞吐量:单位时间内完成的作业数量。
4、实验结果分析对每种调度算法进行多次实验,使用不同的作业集合,并记录相应的性能指标数据。
操作系统试验报告一处理机调度
实验课程名称:实验项目名称处理机调度 实验成绩实验者专业班级名且另IJ同组者实验日期年 月 日第一部分:实验分析与设计(可加页)一、 实验内容描述(问题域描述)实验目的:掌握处理机调度的相关内容,对进程调度算法有深入理解。
实验内容:模拟实现进程调度功能。
实验要求:1、任选一种高级语言实现;2、选择1-2种调度算法;3、能够输入进程的基本信息,如进程名、提交时间、预估运行时间等;4、根据选择的调度算法显示进程调度顺序;5、显示完成调度后每个进程的开始时间、完成时间呢、周转时间,带权周转时间;6、计算平均周转时间和平均带权周转时间。
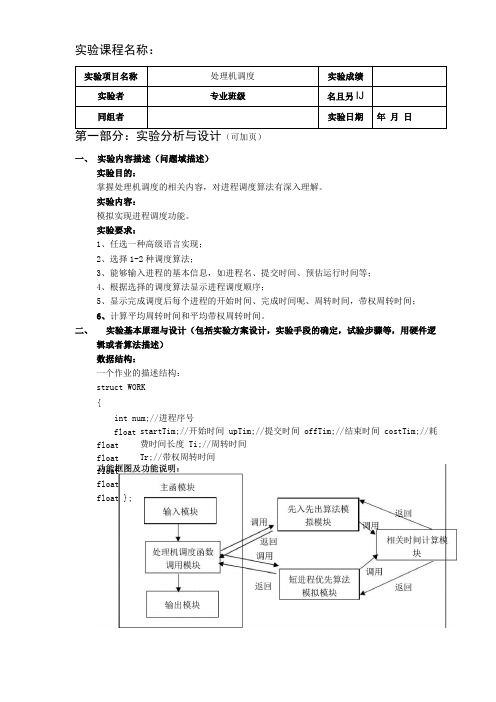
二、 实验基本原理与设计(包括实验方案设计,实验手段的确定,试验步骤等,用硬件逻辑或者算法描述) 数据结构:一个作业的描述结构: struct WORK {int num;//进程序号startTim;//开始时间 upTim;//提交时间 offTim;//结束时间 costTim;//耗费时间长度 Ti;//周转时间 Tr;//带权周转时间输出模块float floatfloat floatfloat float };功能说明:输入模块、输出模块:负责进程的输入及模拟结果的输出;处理机调度函数调用模块:选择调用算法完成进程调度;先入先出算法模拟模块、短进程优先算法模拟模块:实际完成模拟调度功能;相关时间计算模块:计算开始时间、结束时间,周转时间,带权周转时间。
三、主要仪器设备及耗材硬件:pc机;软件:windows2007旗舰版、VS 2010开发环境。
第二部分:实验调试与结果分析(可加页)一、实验源程序:# include <iostream>using namespace std;struct WORK{int num;//进程序号float startTim;//开始时间float upTimJ/提交时间float offTim;//结束时间float costTim;//耗费时间长度float Ti;〃周转时间float Tr;//带权周转时间};void FIFO(WORK *workspace,int workNum);void SJF(WORK *workspace,int workNum);void SUM(WORK *workspace,int workNum,float *T,float *W);int main(){int num;float upTim;float costTim;int workNum;cout<<"请输入需要被调度的作业的数目:"<<endl;cin>>workNum;WORK *workspace=new WORK[workNum];cout<<"请依次输入需要被调度的作业(输入格式:作业序号作业提交时间(用数字表示) 执行时间):"<<endl;int n=0;while(cin>>num>>upTim>>costTim && n<workNum){workspace[n].num=num;workspace[n].upTim=upTim;workspace[n].costTim=costTim;n++;}cin.clear();cin.sync();cout<<"作业序号\t作业提交时间\t执行时间):"<<endl;for(int i=0;i<workNum;i++) {cout<<workspace[i].num<<"\t\t"<<workspace[i].upTim<<"\t\t<<workspace[i].costTim<<endl;/****************** 选择算法,执行算法,结果输出*****************/int cho=0;float * T=new float[0],* W=new float[0];cout<<"请选择调度算法:"<<endl;cout<<0<<"--->FIFO\n"<<1<<"--->最短优先"<<endl;cin>>cho;switch(cho){case 0:FIFO(workspace,workNum);SUM(workspace,workNum,T,W);break;case 1:SJF(workspace,workNum);SUM(workspace,workNum,T,W);break;}cout<<"执行顺序"<<"\t"<<"提交时间"<<"\t"<<"执行时间"<<"\t"<<"开始时间"<<"\t"<<"结束时间"<<endl;for(int i=0;i<workNum;i++) {cout<<workspace[i].num<<"\t\t"<<workspace[i].upTim<<"\t\t"<<workspace[i].costTim <<"\t\t"<<workspace[i].startTim<<"\t\t"<<workspace[i].offTim<<endl;}cout<<"平均周转时间:"<<(*T)/workNum<<"\t 平均带权周转时间:"<<(*W)/workNum<<endl;system("PAUSE"); return 0;}void FIFO(WORK *workspace,int workNum)for(int i=0;i<workNum-1;i++) 〃按提交时间排序for(int j=0;j<workNum-1;j++)if(workspace[j].upTim>workspace[j+1].upTim) 〃大数沉底{WORK temp;temp=workspace[j+1];workspace[j+1]=workspace[j];workspace[j]=temp;}}void SJF(WORK *workspace,int workNum){float MinUptime=0;//最早的提交时间FIFO(workspace,workNum);//先按提交时间排序MinUptime=workspace[0].upTim+workspace[0].costTim;for(int i=0;i<workNum-1;i++) 〃按照最短的作业时间排序for(int j=1;j<workNum-1;j++){if(workspace[j].upTim<MinUptime&&workspace[j+1].upTim<MinUptime) {if(workspace[j].costTim>workspace[j+1].costTim) 〃提交时间大且耗时多的作业沉底{WORK temp;temp=workspace[j+1];workspace[j+1]=workspace[j]; workspace[j]=temp;}} else {MinUptime=workspace[j].upTim+workspace[j].costTim;//更新}}}void SUM(WORK *workspace,int workNum,float *T,float *W){*T=0;*W=0;for(int i=0;i<workNum;i++)//计算开始时间、结束时间,周转时间,带权周转时间{ if(i==0)//计算第一个作业{workspace[i].startTim=workspace[i].upTim;workspace[i].offTim=workspace[i].upTim+workspace[i].costTim;workspace[i].Ti=workspace[i].offTim-workspace[i].upTim;workspace[i].Tr=workspace[i].Ti/workspace[i].costTim;}else//计算第一个作业基础上的其他作业相关时间{if(workspace[i-1].offTim<workspace[i].upTim)workspace[i].startTim=workspace[i].upTim;elseworkspace[i].startTim=workspace[i-1].offTim;workspace[i].offTim=workspace[i].costTim+workspace[i].startTim; workspace[i].Ti=workspace[i].offTim-workspace[i].upTim; workspace[i].Tr=workspace[i].Ti/workspace[i].costTim; }*T+=workspace[i].Ti;//计算平均周转时间 *W+=workspace[i].Tr;//计算平均带权周转时间 } } 二、 实验结果及分析(包括结果描述、实验现象分析、影响因素讨论、综合分析和结论等)测试用例一结果:请依次前A 需要被洞度的作止:葡人格式;作出序号 执行时间M 1 10 2,眼糟翎要被调度的作业(输入格式:作业序号1 10 2作止提交升间1用道字表示)|2 10.2 1 1? 10a 4 0a 5 L 10a 5 0a 2■(此序]作业提父H J 闫 L 10Z 10.23 10.4k10.5青选择调度算法:0——>FIF0 i-—>最超优先 执行时间), 暨 1 0.5 0.3a 二顺序提交时间 执行时间开始时间结束时间1 10210 12,10.2i 12 13 卜 10.4 8.5 13 13.E 口 1Q.5 0.3平均周转时间.2.8 平均带权周转时间吗.26岛北旺京银继纨 -±3.513.8邛业序与 作北提交时、日h 1M 执行时间)।21«.2 13 10.4 0.5 MIB.E情选区调度算法,同——>FIF0 口一》最短优先 0.3执行顺序 提交时间1 10 执行时间 2开始时间10 结克时间 124IB.E 0.3 12 12.3 10.4 0.5 12.3 12.81M-21句周转时间:2.45平均带权周转时间:3.8512.JS13=8日数据细撷处理机调度废锚纵员或吐理挑洞庭模物n京葡a 需要神话后日作业的数诸输妻萼猫调康的作斗的豹目:2 1M-2 1 □ 10.4 0.5 4 10-5 0,3回作业提交时间(用数字表。
处理机调度程序-操作系统课程设计报告

北华航天工业学院《操作系统》课程设计报告课程设计题目:处理机调度程序作者所在系部:计算机与遥感信息技术学院作者所在专业:网络工程作者所在班级: ****** 作者姓名: *******作者学号: ******指导教师姓名: **** 完成时间: 2015.1.5北华航天工业学院教务处制课程设计任务书摘要计算机自从1946年第一台真正意义上的数字电子计算机ENIAC 的诞生以来,已经经历了1854年-1890年、1890年-20世纪早期、20世纪中期、20世纪晚期-现在四个阶段,每一个阶段的发展都发生了质与量的突飞猛进。
然而,计算机的发展只是代表了硬件的提升,对于软件,操作系统的发展更加引人注目。
操作系统(OS)是管理电脑硬件与软件资源的程序,同时也是计算机系统的内核与基石。
操作系统是控制其他程序运行,管理系统资源并为用户提供操作界面的系统软件的集合。
操作系统身负诸如管理与配置内存、决定系统资源供需的优先次序、控制输入与输出设备、操作网络与管理文件系统等基本事务。
操作系统的型态非常多样,不同机器安装的OS可从简单到复杂,可从手机的嵌入式系统到超级电脑的大型操作系统。
目前微机上常见的操作系统有DOS、OS/2、UNIX、XENIX、LINUX、Windows、Netware等。
操作系统的不断提升对于计算机整体性能的提高有着至关重要的作用。
操作系统对于各个方面的要求都不得不提到效率的问题,计算机系统的处理机调度便变得尤为重要。
处理机调度的效率甚至可能成为提高计算机处理速度的瓶颈。
处理机调度就是对系统的资源做出合理的分配,因而,提高处理机的调度算法也变得尤为重要。
关键词:操作系统处理机调度系统资源目录第1章绪论 (1)1.1 处理机调度功能 (1)1.2 处理机调度性能准则 (1)第2章系统需求分析 (3)2.1 时间片轮转调度算法 (3)2.2 短作业优先调度算法 (3)2.3 动态优先级调度算法 (3)第3章系统总体设计 (4)3.1 系统功能设计 (4)3.2 时间片轮转法设计 (4)3.3 短作业优先算法设计 (4)3.4 动态优先级算法设计 (4)第4章系统实现 (6)4.1 时间片轮转法实现 (6)4.2 短作业优先算法实现 (9)4.3 动态优先级算法实现 (12)第5章系统使用说明 (14)第6章课程设计总结 (15)6.1 主要问题及解决办法 (15)6.2 课程设计体会 (15)6.3 自我评定 (15)参考文献 (16)第1章绪论在多道程序设计系统中,内存中有多道程序运行,他们相互争夺处理机这一重要的资源。
处理机调度课程设计模板 操作系统
八、指导教师评语
签名:
年月日
课程设计成绩
附:1、课程设计的填写请按格式要求做;
2、文字内容宋体、五号、1.5倍行距;
3、程序代码字体Times New Roman,五号、1.5倍行距;
《操作系统》课程设计
处理机调度问题实践
系院:计算机科学系
学生姓名:xxxxxxx
学号:xxxxxxxxxxxx
专业:xxxxxxxxxxxx
年级:xxxxxxx
完成日期:xxxx年xx月
指导教师:刘栓
一、课程设计的性质与任务
1、加深对多道程序并发概念的理解,通过编程模拟处理机调度的流程。
2、培养学生能够独立进行知识综合,独立开发较大程序的能力。
2、根据单处理机,多任务的问题特性做好软件实现的需求分析。
3、可根据问题的实际需要,可选择进程数量。
4、当系统运行时,能直观地、动态地反映当前处理机状态及各进程执行的状况。
5、要求在系统安全状态的前提下,兼顾各个进程的公平。
三、课程设计的时间安排
课程设计总时间:8学时
四、课程设计的实验环境
硬件环境:CPU Intel(R) Core™2 Duo E4600 2.40GHz,内存DDR2 1.00GB,
3、培养提高学生软件开发能力和软件的调试技术。
4、培养学生开发大型程序的方法和相互合作的ቤተ መጻሕፍቲ ባይዱ神。
5、培养学生的创新意识。
6、培养学生的算法设计和算法分析能力。
7、培养学生对问题进行文字论述和文字表达的能力。
二、课程设计的内容及其要求
1、可利用先来先服务、短作业优先、响应比高者优先、多级反馈队列模型、时间片轮转法等,来实现处理机的调度。
操作系统课程设计报告进程调度

前言操作系统(Operating System, 简称OS)是管理和控制计算机硬件与软件资源旳计算机程序, 是直接运营在“裸机”上旳最基本旳系统软件, 任何其他软件都必须在操作系统旳支持下才干运营。
操作系统是顾客和计算机旳接口, 同步也是计算机硬件和其他软件旳接口。
操作系统旳功能涉及管理计算机系统旳硬件、软件及数据资源, 控制程序运营, 改善人机界面, 为其他应用软件提供支持, 让计算机系统所有资源最大限度地发挥作用, 提供多种形式旳顾客界面, 使顾客有一种好旳工作环境, 为其他软件旳开发提供必要旳服务和相应旳接口等。
事实上, 顾客是不用接触操作系统旳, 操作系统管理着计算机硬件资源, 同步按照应用程序旳资源祈求, 分派资源, 如: 划分CPU时间, 内存空间旳开辟, 调用打印机等。
操作系统旳重要功能是资源管理, 程序控制和人机交互等。
计算机系统旳资源可分为设备资源和信息资源两大类。
设备资源指旳是构成计算机旳硬件设备, 如中央解决器, 主存储器, 磁盘存储器, 打印机, 磁带存储器, 显示屏, 键盘输入设备和鼠标等。
信息资源指旳是寄存于计算机内旳多种数据, 如系统软件和应用软件等。
操作系统位于底层硬件与顾客之间, 是两者沟通旳桥梁。
顾客可以通过操作系统旳顾客界面, 输入命令。
操作系统则对命令进行解释, 驱动硬件设备, 实现顾客规定。
本次课程设计我们将对上学期所学旳知识进行系统旳应用, 而达到巩固知识旳作用目录1问题概述 (2)2需求分析 (2)3 概要设计 (2)3.1重要功能 (2)3.2 模块功能构造 (3)3.3 软硬件环境 (3)3.4数据构造设计 (3)4 具体设计 (4)4.1“先来先服务(FCFS)调度算法” (4)4.2“短进程调度算法(SPF)” (7)4.3“高响应比优先调度算法” (10)4.4“优先级调度(非抢占式)算法” (13)5 系统测试及调试 (15)5.1测试 (15)5.2调试过程中遇到旳问题 (16)6 心得体会 (17)7 参照文献 (18)8 附录 (19)1问题概述编写一种进程调度程序, 容许多种进程并发执行。
处理机调度操作系统实验报告
scanf("%s",q->name);
scanf("%d",&q->needtime);
q->cputime = 0;
q->priority = P_TIME - q->needtime;
q->process = ready;
q->next = NULL;
printf("2 ROUNDROBIN\n");
printf("3 EXIT\n");
}
pcb* get_process(){
pcb *q;
pcb *p; //头指针
pcb *t; //尾指针
int i = 0;
printf("input name and time\n");
while (i < P_NUM){
int i = 0;
printf("input name and time\n");
while (i<P_NUM){
q=(pcb *)malloc(sizeof(pcb));
scanf("%s",q->name);
scanf("%d",&q->needtime);
q->cputime = 0;
q->count = 0;
t->cputime++;
}
}
void priority_cal(){
pcb *p;
p = get_process();
int cpu = 0;
实验一 处理机调度实验报告

实验一处理机调度实验报告一、实验目的处理机调度是操作系统中的一个重要组成部分,其目的是合理地分配处理机资源,以提高系统的性能和效率。
本次实验的主要目的是通过模拟处理机调度算法,深入理解不同调度算法的工作原理和性能特点,并能够对它们进行比较和分析。
二、实验环境本次实验使用了以下软件和工具:1、操作系统:Windows 102、编程语言:Python3、开发环境:PyCharm三、实验内容1、先来先服务(FCFS)调度算法先来先服务调度算法按照作业或进程到达的先后顺序进行调度。
即先到达的作业或进程先得到处理机的服务。
2、短作业优先(SJF)调度算法短作业优先调度算法优先调度运行时间短的作业或进程。
在实现过程中,需要对作业或进程的运行时间进行预测或已知。
3、高响应比优先(HRRN)调度算法高响应比优先调度算法综合考虑作业或进程的等待时间和运行时间。
响应比的计算公式为:响应比=(等待时间+要求服务时间)/要求服务时间。
4、时间片轮转(RR)调度算法时间片轮转调度算法将处理机的时间分成固定大小的时间片,每个作业或进程在一个时间片内运行,当时间片用完后,切换到下一个作业或进程。
四、实验步骤1、设计数据结构为了表示作业或进程,设计了一个包含作业或进程 ID、到达时间、运行时间和等待时间等属性的数据结构。
2、实现调度算法分别实现了上述四种调度算法。
在实现过程中,根据算法的特点进行相应的处理和计算。
3、模拟调度过程创建一组作业或进程,并按照不同的调度算法进行调度。
在调度过程中,更新作业或进程的状态和相关时间参数。
4、计算性能指标计算了平均周转时间和平均带权周转时间等性能指标,用于评估不同调度算法的性能。
五、实验结果与分析1、先来先服务(FCFS)调度算法平均周转时间:通过计算所有作业或进程的周转时间之和除以作业或进程的数量,得到平均周转时间。
在 FCFS 算法中,由于按照到达顺序进行调度,可能会导致长作业或进程长时间占用处理机,从而使平均周转时间较长。
操作系统 课程设计 处理机调度 图形界面 完整报告
目录第一章概述 (1)1.1需求分析 (1)1.2背景设计 (1)第二章概要设计 (2)第三章详细设计 (4)3.1高响应比调度算法 (4)3.2时间片轮转法 (5)3.3短进程优先法 (7)第四章调试分析与测试结果 (9)第五章总结 (13)第六章参考文献 (14)第七章附录 (15)第一章概述1.1需求分析进程是操作系统最重要的概念之一,进程调度是操作系统内核的重要功能,本实验要求用C语言编写一个进程调度模拟程序,使用短作业优先调度算法,高响应比调度算法,时间片轮转调度算法实现进程调度。
可以手动阻塞与唤醒。
并用MFC实现图形界面。
本实验可加深对进程调度算法的理解。
1.2背景设计在OS中,调度的实质是一种资源分配,调度算法即指:根据系统的资源分配策略所规定的资源分配算法。
对于不同的系统和系统目标,通常采用不同的调度算法,如在批处理系统中,为照顾为数众多的短作业,采用短作业有限调度算法;在分时系统中,为保证系统具有合理的响应时间,采用轮转法进行调度。
采用算法时,则要考虑多方面因素,以便达到最佳效果。
第二章概要设计设计一个有多个进程共行的进程调度程序。
进程调度算法:短作业优先调度算法,高响应比调度算法,时间片轮转调度算法每个进程有一个进程控制块( PCB)表示。
进程控制块可以包含如下信息:进程名、优先数、到达时间、服务时间、进程状态等等。
struct progress{CString Name; //进程名称CString Start; //创建时间int ServiceT; //服务时间int RunningT; //消逝时间int RemainT;//剩余时间int id;//进程标识符CProgressCtrl* pro; //指向进度条的指针int Rp;//进程成为就绪进程的时间float prio;//进程优先权};进程的优先权为:响应时间/要求服务时间。
进程的运行时间以时间片为单位进行计算。
操作系统课程设计报告进程调度算法
操作系统课程设计报告进程调度算法Minix 操作系统实践计算机科学与技术题 目 :姓 名 : 学 号 : 专业 : 指导教师 :实验一1.实验目的通过优先权法和轮转算法的模拟加深对进程概念和进程调度过程的理解,掌握进程状态之间的切换,同时掌握进程调度算法的实现方法和技巧。
2.实验内容1.用C++语言来实现对n 个进程采用优先权优先算法以及轮转算法的进程调度。
2.每个用来标识进程的进程控制块PCB 用结构来描述,包括以下字段:(1)进程标识ID,其中0 为闲逛进程,用户进程的标识数为1,2,3⋯。
(2)进程优先级Priority ,闲逛进程(idle)的优先级为0,用户进程的优先级大于0,且随机产生,标识数越大,优先级越高。
(3)进程占用的CPU时间CPUtime,进程每运行一次,累计值等于4。
(4)进程总共需要运行时间Alltime ,利用随机函数产生。
(5)进程状态,0-就绪态;1-运行态;2-阻塞态。
(6)队列指针next,用来将多个进程控制块PCB 链接为队列。
3.优先数改变的原则(1)进程在就绪队列中每呆一个时间片,优先数增加1。
(2)进程每运行一个时间片,优先数减3。
4.在调度前,系统中拥有的进程数PCB_number 由键盘输入,经初始化后,所有的进程控制块PCB 链接成就绪队列。
5.为了清楚地观察诸进程的调度过程,程序应将每个时间片内的进程的情况显示出来,3.实验步骤进程调度的思想(1)当系统空闲(就绪队列为空)时,系统运行闲逛进程,否则运行其他进程,发生变迁1(就绪→运行)。
(2)在运行进程(包括闲逛进程)的过程中,可能发生变迁2(运行→阻塞),即将运行进程插入到阻塞队列(闲逛进程不能被阻塞),可能有其他新的进程创建PCB,还可能唤醒阻塞队列中的某些进程PCB,发生变迁3(阻塞→就绪),即从阻塞队列中移出并插入就绪队列中。
(3)时间片运行结束后,若进程累计占用CPU 时间大于等于进程需要运行的时间,则进程执行结束,释放其PCB。
操作系统-课程设计报告-处理机调度程序

操作系统课程设计报告学校:广州大学学院:计算机科学与教育软件学院班级:计算机127班课题:处理机调度程序任课老师:陶文正、陈文彬姓名:黄俊鹏学号:1200002111班内序号:27成绩:日期:2015年1月6日一、设计目的在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念。
二、设计要求1)进程调度算法包括:时间片轮转法,短作业优先算法,动态优先级算法。
2)可选择进程数量3)本程序包括三种算法,用C语言实现,执行时在主界面选择算法(可用函数实现)(进程数,运行时间,优先数由随机函数产生)执行,显示结果。
三、设计思路及算法思想1.界面菜单选项一级菜单提供2个选项:①自动生成进程数量②手动输入所需进程数量一级菜单选择完毕后进入二级菜单:①重新生成进程②时间片轮转法③短作业优先算法④动态优先级算法⑤退出程序2.调度算法程序所用PCB结构体需要用到的进程结构体如上图所示1)时间片轮转法主要是设置一个当前时间变量,curTime和时间片roundTime。
遍历进程组的时候,每运行一个进程,就把curTime += roundTime。
进程已运行时间加roundTime2)短作业优先算法遍历进程组,找到未运行完成并且运行时间最短的进程,让它一次运行完成,如此往复,直到所有进程都运行完成为止。
3)动态优先级算法做法跟短作业优先算法类似,此处主要是比较进程的优先数,优先级高者,先执行。
直到全部执行完毕。
当一个进程运行完毕后,适当增减其余进程的优先数,以达到动态调成优先级的效果。
3.程序流程图四、运行截图1)启动后输入5,生成5个进程2)输入1,选择时间片轮转法。
自动输出结果,分别是时间片为1和4的结果3)输入2,选择短作业优先算法4)输入3,选择动态优先级算法5)输入0,重新生成进程,再输入3,生成3个进程,选择2.短作业优先算法6)输入q,退出五、心得体会通过这次实验,让我对操作系统的进程调度有了更进一步的了解。
操作系统 处理机调度 课程设计报告
中南大学《操作系统》课程设计报告设计报告题目:处理机调度模拟程序学院:信息科学与工程学院专业:电子信息0802姓名:王昊学号:0909080925指导教师:张晓勇完成时间:2011年7月12日目录一、课程设计题目 (3)二、基本概念及思想 (3)三、部分程序主要流程图 (9)四、操作截图 (11)五、程序源代码 (12)六、心得体会及总结 (21)一.课程设计题目:课题1:理机调度模拟程序:选择一个调度算法,实现处理机调度。
设计目的:在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念。
设计要求:1)进程调度算法包括:时间片轮转法,短作业优先算法,最高响应比优先算法。
2)可选择进程数量3)本程序包括三种算法,可用C语言实现,执行时在主界面选择算法(可用函数实现),进入子页面后输入进程数及每个进程的运行时间,每个进程的优先数由随机函数产生且优先数随等待时间而变化,执行,显示结果。
二.基本概念及思想:(1)进程的创建:由系统为某个进程设置一个进程控制块PCB,用于对进程进行控制和管理。
进程任务完成,由系统收回其PCB,该进程便消亡。
(2)进程的三种状态:运行、就绪、完成。
进程的三种状态可以通过设计三个链队列来实现:finish为完成队列的头指针,ready为就绪队列的头指针,tail 为循环轮转法队列的尾指针。
因为每一时刻,CPU只能运行一个进程,所以运行队列只有一个run指针指向当前运行进程。
(3)进程调度的功能:按照一定的策略从就绪队列的多个进程中选取一个进程,使其获得CPU而运行。
①动态优先数调度算法:思想:为每一个进程设一个优先数,它总是把处理机给就绪队列中具有最高优先级的进程。
初始的进程优先数是随机产生的,随着进程的运行对优先数进行调整,每次运行时都是从就绪队列中选取优先数最大的进程运行,所以将就绪队列按照优先数的大小从高到低排序,这样,每次取对首进程即可。
处理机的调度课程设计

处理机的调度课程设计一、教学目标本节课的教学目标是让学生掌握处理机的调度原理和方法,理解调度算法的基本思想和实现方式,能够分析调度算法的性能和适用场景。
具体包括以下三个方面的目标:1.知识目标:(1)了解处理机调度的基本概念、作用和分类;(2)掌握常用调度算法(如FCFS、SJF、HRRN等)的基本原理和实现方式;(3)理解调度算法的设计思想和评价指标。
2.技能目标:(1)能够运用调度算法分析实际问题,设计简单的调度策略;(2)具备调试和优化调度算法的能力;(3)会使用相关工具和软件进行调度算法的实现和性能分析。
3.情感态度价值观目标:(1)培养学生对计算机系统运行效率的重视;(2)培养学生勇于探索、创新的精神;(3)培养学生团队协作、沟通交流的能力。
二、教学内容本节课的教学内容主要包括以下几个部分:1.处理机调度概述:介绍处理机调度的基本概念、作用和分类;2.常用调度算法:详细讲解FCFS、SJF、HRRN等调度算法的原理和实现方式;3.调度算法的设计思想和评价指标:分析调度算法的设计思路,介绍调度算法的评价指标;4.调度算法的应用和实践:探讨调度算法在实际应用中的案例,教授如何设计和优化调度策略。
三、教学方法为了达到本节课的教学目标,我们将采用以下教学方法:1.讲授法:讲解处理机调度的基本概念、原理和算法;2.讨论法:学生讨论调度算法的设计思想和应用场景;3.案例分析法:分析实际案例,让学生了解调度算法在实际应用中的作用;4.实验法:引导学生动手实践,调试和优化调度算法。
四、教学资源为了支持本节课的教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:选用权威、实用的教材,如《计算机操作系统》;2.参考书:提供相关领域的参考书籍,以便学生深入理解调度算法;3.多媒体资料:制作精美的PPT,生动展示调度算法的原理和应用;4.实验设备:准备相应的实验设备,如计算机、网络设备等,让学生动手实践。
计算机操作系统-处理机调度实验报告
中南大学实验名称:处理机调度课程名称:计算机操作系统学生姓名盛希玲学号 ********** 学院信息科学与工程学院专业班级电子信息工程0602 完成时间 2008年10月12日目录一实验内容 (2)二实验目的 (2)三实验题目 (2)四基本思想 (2)五算法分析 (2)六流程图 (3)七算法描述 (4)八运行输出结果 (9)一实验内容选择一个调度算法,实现处理机调度。
二实验目的多道系统中,当就绪进程数大于处理机数时,须按照某种策略决定哪些进程优先占用处理机。
本实验模拟实现处理机调度,以加深了解处理机调度的工作。
三实验题目设计一个按优先权调度和时间片轮转算法实现处理机调度的程序。
四基本思想先选择时间片的个数和每个时间片需要的时间,正在运行的进程每运行一秒其优先权数目加一,即其优先权减小。
每个时间片运行结束后,选择进入时间片进程优先权数目最小的进程,开始下一个时间片的运行。
如果有进程运行结束,则离开,再在就绪队列中选择优先权数目最小的进程进入。
在运行期间,如果有新的进程来到,按优先权大小放入就绪队列中。
五算法分析定义一个结构体,此包含了PCB的信息:struct PCB{char PID[5]; /*进程名*/int needtime; /*要求运行的时间*/int cputime; /*已运行时间*/int priority; /*优先权(越小越高)*/int starttime; /*进入就绪队列的时间*/int overtime; /*运行完成的时间*/int state; /*状态:1就绪2运行3完成*/struct PCB *next;};子函数struct PCB *create(int num,int n)用来建立一个按优先级大小排列的就绪进程链表和一个按时间先后循序排列的将进入就绪进程的链表。
main()函数中用一while循环输出进入时间片的进程状态。
六流程图七算法描述#define NULL 0#define LEN sizeof(struct PCB)#include"stdio.h"#include"stdlib.h"struct PCB{char PID[5]; /*进程名*/int needtime; /*要求运行的时间*/int cputime; /*已运行时间*/int priority; /*优先权(越小越高)*/int starttime; /*进入就绪队列的时间*/int overtime; /*运行完成的时间*/int state; /*状态:1就绪2运行3完成*/struct PCB *next;};struct PCB *create(int num,int n)/*创建进程,并将进程按优先级顺序插入队列中*/ {struct PCB *head,*p,*p1,*p2;int i;head=NULL; /*头指针指零*/for(i=1;i<=num;i++) /*循环建立所有进程*/{printf("请输入第%d个进程的信息\n",i);p=(struct PCB *)malloc(LEN); /*开辟一个空间*/printf("进程名:"); /*输入进程名*/scanf("%s",p->PID);printf("要求运行的时间:"); /*输入要运行的时间*/scanf("%d",&p->needtime);p->cputime=0; /*占用处理机的时间赋为零*/printf("优先权:"); /*输入优先权*/scanf("%d",&p->priority);if(n==1)p->starttime=0; /*进入就绪队列的时间赋为零*/else{printf("进入就绪队列时间:"); /*输入进入就绪队列的时间*/scanf("%d",&p->starttime);}p->overtime=-1; /*运行没有结束所以运行完成的时间赋为-1*/p->state=1; /*状态赋为就绪状态*/p1=head; /*p1指针指向头指针*/if(head==NULL) /*如果头指针为零将头指针指向新建立的进程*/ {head=p;head->next=NULL;}else /*头指针不为零的情况*/{if(n==1)while(p1!=NULL&&p->priority>p1->priority) /*查找插入点*/{p2=p1;p1=p1->next;}elsewhile(p1!=NULL&&p->starttime>p1->starttime) /*查找插入点*/{p2=p1;p1=p1->next;}if(head==p1) /*优先权的值最小作为表头*/{p->next=head;p2=head=p;}else /*否则的话插入*/{p2->next=p;p->next=p1;}}}return(head);}void main(){char now[5];int cho,num,num1,timepiece,time,i,j,k,flag,choo,clock=0;struct PCB*head,*head1,*over,*later,*l,*l1,*l2,*p,*p0,*p1,*p2,*q,*q1,*q2,*q3;over=NULL;printf("初始化进程...\n");printf("输入总的就绪进程数:");scanf("%d",&num);head=create(num,1); /*建立就绪进程的链表*/printf("输入将会就绪的进程数:");scanf("%d",&num1); /*建立将会进入就绪进程的链表*/later=create(num1,2);printf("cpu是否开始运行:1是 2不是--");scanf("%d",&cho);if(cho==1) /*处理机开始进行调度*/{printf("现在的时间是:");scanf("%s",now);printf("显示所有就绪的进程:\n");p2=head;printf("进程名\t要求运行时间\t已运行时间\t优先权\t状态(1就绪2运行3结束)\n");while(p2!=NULL){printf("%s\t%d\t\t%d\t\t%d\t%d\n",p2->PID,p2->needtime,p2->cputime ,p2->priority,p2->state);p2=p2->next;}printf("请输入时间片总数:");scanf("%d",&timepiece);printf("请输入时间片的时间:");scanf("%d",&time);printf("运行正式开始!\n");head1=head;printf("\t\t进程名\t要求运行时间\t已运行时间\t优先权\t状态\n"); for(i=1;i<=timepiece;i++) /*将进入时间片运行的进程用头指针head1指示,并改变就绪进程头指针head的指向*/{if(head!=NULL){p=head;head=head->next;}else break;}p->next=NULL;while(head1!=NULL) /*就绪进程头指针不为零就循环*/{head1->state=2; /*状态:1就绪2运行3完成*/for(j=1;j<=time;j++) /*每个时间片所需时间的循环*/{clock++; /*定时器每秒加1*/if(later!=NULL&&clock==later->starttime)/*如果将进入就绪队列的进程时间到达加入就绪队列*/ {l=later;l1=head;later=later->next;if(head==NULL){head=l;head->next=NULL;}else{while(l1!=NULL&&l1->priority<=l->priority){l2=l1;l1=l1->next;}if(l1==head){l->next=head;head=l;}else{l2->next=l;l->next=l1;}}}flag=0;printf("\n%3d秒时间片第%d秒 ",clock,j);q=head1;if(head1->needtime>head1->cputime) /*以运行时间和优先权都加1*/ {head1->cputime++;head1->priority++;while(q) /*运行队列不为零输出其信息*/ {if(q==head1)printf("%s\t%d\t\t%d\t\t%d\t%d\n",q->PID,q->needtime,q->cputime,q->pr iority,q->state);elseprintf("\t\t %s\t%d\t\t%d\t\t%d\t%d\n",q->PID,q->needtime,q->cputim e,q->priority,q->state);q=q->next;}}if(head1->needtime==head1->cputime)/*运行完成将其放入over为头指针的链表中*/ {head1->state=3;head1->overtime=clock;if(over==NULL){over=head1;head1=head1->next;over->next=NULL;}elseif(over!=NULL&&head1!=NULL){p1=head1->next;p0=over;over=head1;over->next=p0;head1=p1;}flag=1;}if(flag==1) break;}if(flag==1) /*有进程结束的情况*/{if(head!=NULL) /*就绪队列不为零将优先权最高的放入运行链表中*/ {q1=head;head=head->next;q2=head1;while(q2!=NULL&&q2->priority<=q1->priority){q3=q2;q2=q2->next;}if(q2==head1){q1->next=head1;head1=q1;}else{q3->next=q1;q1->next=q2;}}}else /*无进程结束的情况,寻找优先权最高的运行*/{head1->state=1;q1=head1;head1=head1->next;q2=head1;while(q2!=NULL&&q2->priority<=q1->priority){q3=q2;q2=q2->next;}if(q2==head1){q1->next=head1;head1=q1;}else{q3->next=q1;q1->next=q2;}}}}printf("cpu结束运行!\n");printf("是否输出所有结束的进程:1是2不是--");scanf("%d",&choo);if(choo==1) /*输出所有完成运行的进程*/{printf("开始时间:%s\n",now);printf("进程名\t要求运行时间\t进入就绪队列的时间\t运行完成的时间\n");while(over!=NULL){printf("%s\t%d\t\t%d\t\t\t%d\n",over->PID,over->needtime,over->startt ime,over->overtime);over=over->next;}}}八运行输出结果初始化进程如右图显示现在的时间和所有就绪的进程输入时间片的总数和每个时间片的时间运行时显示的信息。
操作系统-课程设计报告-处理机调度程序

操作系统课程设计报告学校:广州大学学院:计算机科学与教育软件学院班级:计算机127 班课题:处理机调度程序任课老师:陶文正、陈文彬姓名:黄俊鹏学号:1200002111班内序号:27成绩:日期:2015 年 1 月 6 日、设计目的在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念。
、设计要求1)进程调度算法包括:时间片轮转法,短作业优先算法,动态优先级算法2)可选择进程数量3)本程序包括三种算法,用C 语言实现,执行时在主界面选择算法(可用函数实现)(进程数,运行时间,优先数由随机函数产生)执行,显示结果。
三、设计思路及算法思想1. 界面菜单选项一级菜单提供2 个选项:① 自动生成进程数量② 手动输入所需进程数量一级菜单选择完毕后进入二级菜单:①重新生成进程②时间片轮转法③短作业优先算法④动态优先级算法⑤退出程序2. 调度算法typedef st ruct char name;mr pri-ority; intrunnirtgrime;"肚先註 "运和时Eint arriveTiflie;"到达时剖int beg in Time;"幵皓时旬int TinishTiJiie: "尧成时列int cyclingTlme;double weigthC/clingTime:kint int >PCB;hadRunTimt;finish:"已经运行呼间/At否完咸程序所用PCB结构体需要用到的进程结构体如上图所示1)时间片轮转法主要是设置一个当前时间变量,curTime和时间片roundTime。
遍历进程组的时候,每运行一个进程,就把curTime += roundTime。
操作系统实验之处理机调度实验报告

1、开发工具
Clion for mac 2016,采用 cmake 编译。
2、主要源码
//先来先服务 void FCFS(List *p, int count) {
List temp; int i, j; //按照到达时间排序 for (i = 1; i < count; i++) {
min = 100; temp = p[k].Finish_time; for (j = 0; j < count; j++) {
if (p[j].order != 0 || temp - p[j].Arrival_time < 0) continue;
if (min > p[j].Service_time) {
max = 0;
temp = p[k].Finish_time; //找响应比最高任务 for (j = 0; j < count; j++) {
if (p[j].order != 0 || temp - p[j].Arrival_time <= 0) continue;
if (max < (temp - p[j].Arrival_time) / p[j].Service_time) {
if (temp > p[i].Arrival_time) {
temp = p[i].Arrival_time; k = i; } } //按照响应比大小设置优先级,以及相应参数 for (i = 0; i < count; i++) { p[k].order = ++flag; p[k].Start_time = temp; p[k].Wait_time = temp - p[k].Arrival_time; p[k].Finish_time = temp + p[k].Service_time; p[k].Turnover_time = p[k].Finish_time - p[k].Arrival_time; p[k].WeightedTurn_time = p[k].Turnover_time / p[k].Service_time;
操作系统-课程设计报告-处理机调度程序

操作系统课程设计报告学校:广州大学学院:计算机科学与教育软件学院班级:计算机127班课题:处理机调度程序任课老师:陶文正、陈文彬姓名:黄俊鹏学号:11班内序号:27成绩:日期:2015年1月6日一、设计目的在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念。
二、设计要求1)进程调度算法包括:时间片轮转法,短作业优先算法,动态优先级算法。
2)可选择进程数量3)本程序包括三种算法,用C语言实现,执行时在主界面选择算法(可用函数实现)(进程数,运行时间,优先数由随机函数产生)执行,显示结果。
三、设计思路及算法思想1.界面菜单选项一级菜单提供2个选项:①自动生成进程数量②手动输入所需进程数量一级菜单选择完毕后进入二级菜单:①重新生成进程②时间片轮转法③短作业优先算法④动态优先级算法⑤退出程序2.调度算法程序所用PCB结构体需要用到的进程结构体如上图所示1)时间片轮转法主要是设置一个当前时间变量,curTime和时间片roundTime。
遍历进程组的时候,每运行一个进程,就把curTime += roundTime。
进程已运行时间加roundTime2)短作业优先算法遍历进程组,找到未运行完成并且运行时间最短的进程,让它一次运行完成,如此往复,直到所有进程都运行完成为止。
3)动态优先级算法做法跟短作业优先算法类似,此处主要是比较进程的优先数,优先级高者,先执行。
直到全部执行完毕。
当一个进程运行完毕后,适当增减其余进程的优先数,以达到动态调成优先级的效果。
3.程序流程图四、运行截图1)启动后输入5,生成5个进程2)输入1,选择时间片轮转法。
自动输出结果,分别是时间片为1和4的结果3)输入2,选择短作业优先算法4)输入3,选择动态优先级算法5)输入0,重新生成进程,再输入3,生成3个进程,选择2.短作业优先算法6)输入q,退出五、心得体会通过这次实验,让我对操作系统的进程调度有了更进一步的了解。
实现处理机调度课程设计

实现处理机调度课程设计一、课程目标知识目标:1. 让学生理解处理机调度的基本概念,掌握其功能和重要性;2. 学会分析不同处理机调度算法的特点和优缺点;3. 掌握几种常见的处理机调度算法,如先来先服务、短作业优先、优先级调度等;4. 了解处理机调度在操作系统中的作用和影响。
技能目标:1. 培养学生运用处理机调度算法解决实际问题的能力;2. 提高学生分析、设计、优化调度算法的技能;3. 学会使用相关工具和软件模拟处理机调度过程。
情感态度价值观目标:1. 培养学生对操作系统学科的兴趣和热情;2. 增强学生的团队合作意识和解决问题的能力;3. 引导学生认识到处理机调度在提高计算机系统性能方面的重要性。
分析课程性质、学生特点和教学要求:1. 课程性质:本课程为计算机科学与技术专业核心课程,具有较强的理论性和实践性;2. 学生特点:学生已具备一定的计算机操作系统知识,具备一定的编程基础;3. 教学要求:结合实际案例,采用任务驱动法,引导学生主动探索和解决问题。
二、教学内容1. 处理机调度基本概念:处理机调度的定义、作用、分类和性能指标;2. 处理机调度算法:- 先来先服务(FCFS)调度算法;- 短作业优先(SJF)调度算法;- 优先级调度算法;- 时间片轮转调度算法;- 多级反馈队列调度算法;3. 处理机调度算法性能分析:分析各种调度算法的优缺点及适用场景;4. 处理机调度算法实现:结合实际案例,编写程序实现各种调度算法;5. 处理机调度在操作系统中的应用:探讨处理机调度在操作系统中的重要性及影响。
教学安排和进度:第1周:处理机调度基本概念;第2周:先来先服务(FCFS)调度算法;第3周:短作业优先(SJF)调度算法;第4周:优先级调度算法;第5周:时间片轮转调度算法;第6周:多级反馈队列调度算法;第7周:处理机调度算法性能分析;第8周:处理机调度算法实现及实践;第9周:处理机调度在操作系统中的应用。
教材章节关联:《计算机操作系统》第3章“处理机管理”,第4章“进程调度与死锁”,结合课本内容进行讲解和拓展。
《操作系统》实验报告 单处理机系统的进程调度

{
inti;
if(ready.head==-1)
(printf("无T就¨ª绪¡Â进?程¨¬\n");
return;
)
i=ready.head;
ready.head=pcbarea[ready.head].next;
if(ready.head==-1)ready.tail=-1;
scanf("%d",&num);
while(num>=0)
{
create(num);
scanf("&d",&num);
}
sheduling();
if(run!=-1)
{
printf("进?程¨¬标À¨º识º?符¤?进?程¨¬状Á¡ä态¬?寄?存ä?器¡Â内¨²容¨Y:êoax bx cx pc psw:\n");
#definen 10
struct
{
intname;
intstatus;
intax,bx,cx,dx;
intpc;
intpsw;
intnext;
}pcbarea[n];
intPSW,AX,BX,CX,DX,PC,TIME;
intrun;
struct
{
inthead;
inttail;
}ready;
intpfree;
实验项目
名称
单处理机系统的进程调度
实验
目的及要求
1、加深对进程概念的理解,明确进程的区别。
2、深入了解系统如何组织进程,创建进程。
3、进一步认识如何实现处理机调度。
实验
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
:操作系统课程设计报告@学校:广州大学学院:计算机科学与教育软件学院班级:计算机127班课题:处理机调度程序任课老师:陶文正、陈文彬姓名:黄俊鹏{学号:11班内序号:27成绩:日期:2015年1月6日一、设计目的在多道程序和多任务系统中,系统内同时处于就绪状态的进程可能有若干个。
也就是说能运行的进程数大于处理机个数。
为了使系统中的进程能有条不紊地工作,必须选用某种调度策略,选择一进程占用处理机。
要求学生设计一个模拟处理机调度算法,以巩固和加深处理机调度的概念。
二、设计要求1)进程调度算法包括:时间片轮转法,短作业优先算法,动态优先级算法。
2)可选择进程数量3)本程序包括三种算法,用C语言实现,执行时在主界面选择算法(可用函数实现)(进程数,运行时间,优先数由随机函数产生)执行,显示结果。
三、设计思路及算法思想1.·2.界面菜单选项一级菜单提供2个选项:①自动生成进程数量②手动输入所需进程数量一级菜单选择完毕后进入二级菜单:①重新生成进程②时间片轮转法《③短作业优先算法④动态优先级算法⑤退出程序3.调度算法程序所用PCB结构体!需要用到的进程结构体如上图所示1)时间片轮转法主要是设置一个当前时间变量,curTime和时间片roundTime。
遍历进程组的时候,每运行一个进程,就把curTime += roundTime。
进程已运行时间加roundTime2)短作业优先算法遍历进程组,找到未运行完成并且运行时间最短的进程,让它一次运行完成,如此往复,直到所有进程都运行完成为止。
3)—4)动态优先级算法做法跟短作业优先算法类似,此处主要是比较进程的优先数,优先级高者,先执行。
直到全部执行完毕。
当一个进程运行完毕后,适当增减其余进程的优先数,以达到动态调成优先级的效果。
4.程序流程图四、运行截图1)启动后输入5,生成5个进程~2)输入1,选择时间片轮转法。
自动输出结果,分别是时间片为1和4的结果3)输入2,选择短作业优先算法#4)输入3,选择动态优先级算法;5)输入0,重新生成进程,再输入3,生成3个进程,选择2.短作业优先算法6)输入q,退出五、心得体会}通过这次实验,让我对操作系统的进程调度有了更进一步的了解。
这个实验的模拟程度跟真实系统相比只是冰山一角,由此可见操作系统是何其复杂的软件产品,仅进程调度就有那么丰富和内涵的知识需要掌握。
但是再复杂的系统,都是由小部件构成的。
古语云:不积跬步,无以至千里。
不积小流,无以成江海。
掌握这些基础的知识,可以为以后打下扎实的基础。
六、附录(源代码)All rights reserved.ame = name;p[i].priority = GetRandomNumber(MIN_PRIORITY, MAX_PRIORITY);p[i].runningTime= GetRandomNumber(MIN_RUNNING_TIME,MAX_RUNNING_TIME);name++;!}}void PrintResult(PCB p[],int num){double avgCycTime = 0,avgWeiCycTime = 0;printf("|进程名到达时间运行时间开始时间完成时间周转时间带权周转时间优先数 |\n");for (int i = 0;i < num;i++){printf("|%3c %-4d %-4d %-4d %-4d %-4d % %-4 d|\n",p[i].name,p[i].arriveTime,p[i].runningTime,p[i].beginTime,p[i].finish Time,p[i].cyclingTime,p[i].weigthCyclingTime,p[i].priority);}avgCycTime += p[i].cyclingTime;avgWeiCycTime += p[i].weigthCyclingTime;rriveTime = 0;p[i].beginTime = 0;p[i].finishTime = 0;p[i].cyclingTime = 0;p[i].weigthCyclingTime = 0;^p[i].hadRunTime = 0;p[i].finish = 0;}avgWeiCycTime /= num;avgCycTime /= num;printf("平均周转时间:%.2f 平均带权周转时间:%.2f\n",avgCycTime,avgWeiCycTime);}"inish)continue;eginTime == 0 && i != 0){p[i].beginTime = curTime;}adRunTime + roundTime >= p[i].runningTime){p[i].finishTime= curTime + p[i].runningTime- p[i].hadRunTime;>p[i].cyclingTime = p[i].finishTime - p[i].arriveTime;p[i].weigthCyclingTime= p[i].cyclingTime/(double)p[i].runningTime;p[i].finish = 1;finishNum ++;curTime += p[i].runningTime - p[i].hadRunTime;}else{p[i].hadRunTime += roundTime;curTime += roundTime;>}}}PrintResult(p, num);}void RoundRobin(PCB p[],int num){RealRoundRobin(p, num, 1); inish== 0&& p[min].runningTime>= p[i].runningTime)*min = i;else if (p[i].finish == 0 && p[min].finish == 1)min = i;}p[min].beginTime = curTime;p[min].hadRunTime = p[min].runningTime;p[min].finishTime = p[min].beginTime + p[min].runningTime;>p[min].cyclingTime = p[min].finishTime - p[min].arriveTime;p[min].weigthCyclingTime= p[min].cyclingTime/(double)p[min].runningTime;p[min].finish = 1;finishNum++;curTime = p[min].finishTime;}PrintResult(p, num);}#inish == 0 && p[min].priority >= p[i].priority)min = i;else if (p[i].finish == 0 && p[min].finish == 1)min = i;}p[min].beginTime = curTime;)p[min].hadRunTime = p[min].runningTime;p[min].finishTime = p[min].beginTime + p[min].runningTime;p[min].cyclingTime = p[min].finishTime - p[min].arriveTime;p[min].weigthCyclingTime= p[min].cyclingTime/(double)p[min].runningTime;p[min].finish = 1;finishNum++;curTime = p[min].finishTime;}-PrintResult(p, num);}int main(int argc, const char * argv[]) {PCB pcbGroup[30]; n");}}!新生成进程 | 1.时间片轮转法 | 2.短作业优先算法 | 3.动态优先级算法 | q.退出\n>>>>>>");char ch;while ((ch = getchar()) == '\n');switch (ch) {case'0'://0 重新生成进程processNum = 0;break;case'1'://1 时间片轮转法RoundRobin(pcbGroup, processNum);break;case'2'://2 短作业优先算法ShortestJobFirst(pcbGroup, processNum);break;case'3'://3 动态优先级算法DynamicPriorityFirst(pcbGroup,processNum);break;case'q'://q 退出exit(0);default:break; }}return0;}。