雅可比
雅可比矩阵概率论

雅可比矩阵在概率论中有着重要的应用。
在一元微积分中,雅可比行列式为1,但在多元微积分中,雅可比行列式的值会受到向量缩放程度的影响。
对于多元微积分变量代换,雅可比行列式起着关键作用。
例如,在极坐标变换中,x=rcosθ,y=rsinθ,雅可比行列式为r。
如果变量代换不合法,求出来的积分就是0。
因此,雅可比行列式也是衡量变量代换是否合法的重要工具。
此外,雅可比矩阵也是多元微分学中的重要概念。
它是一种特殊的矩阵导数,可以描述一个向量场和一个标量场的关系。
在几何上,雅可比矩阵可以表示为一个向量场的切空间。
总之,雅可比矩阵在多元微积分和概率论中都有着重要的应用,是理解和解决相关问题的重要工具之一。
雅可比矩阵的形式

雅可比矩阵的形式摘要:1.引言2.雅可比矩阵的定义和形式3.雅可比矩阵的性质和应用4.结论正文:1.引言矩阵在数学和物理学等领域具有广泛的应用,它可以用来表示线性方程组、线性变换以及向量空间等。
矩阵的种类繁多,其中雅可比矩阵是一种非常重要的矩阵。
本文将介绍雅可比矩阵的形式,并探讨其性质和应用。
2.雅可比矩阵的定义和形式雅可比矩阵(Jacobian Matrix)是一种方阵,其元素是另一个多元函数的偏导数。
设函数f(x) 是一个n 元函数,其定义域为D,雅可比矩阵记作J_f(x),表示为:J_f(x) = [f_i/x_j] (i=1,2,...,n; j=1,2,...,n)其中,f_i 表示函数f 的第i 个分量,x_j 表示第j 个自变量,f_i/x_j 表示f_i 关于x_j 的偏导数。
3.雅可比矩阵的性质和应用雅可比矩阵具有以下性质:(1) 雅可比矩阵是方阵,其行数和列数均为n,其中n 是函数f 的维度。
(2) 雅可比矩阵的元素是函数f 的偏导数,因此它是一个关于自变量x 的函数。
(3) 雅可比矩阵在函数f 的定义域D 内是连续可导的。
(4) 雅可比矩阵的行列式表示了函数f 在定义域D 上的可微性。
如果行列式不为零,则函数f 在D 上可微;如果行列式为零,则函数f 在D 上不可微。
雅可比矩阵在数学和物理学中有广泛应用,例如:(1) 求解多元函数的极值和驻点。
通过求解雅可比矩阵的行列式为零的条件,可以得到函数的临界点和鞍点。
(2) 研究多元函数的曲率和曲面。
雅可比矩阵的元素表示了函数在各点处的切向量,从而可以计算曲率和曲面的形状。
(3) 求解常微分方程的通解。
在常微分方程的数值解法中,雅可比矩阵可以用来构造迭代公式,从而求解方程的通解。
4.结论雅可比矩阵是一种重要的矩阵,其形式为函数偏导数的矩阵。
雅可比矩阵具有一些重要的性质,并广泛应用于数学和物理学等领域。
速度雅可比矩阵定义
速度雅可比矩阵定义
摘要:
1.雅可比矩阵的定义
2.速度雅可比矩阵的概念
3.速度雅可比矩阵在物体运动中的应用
4.速度雅可比矩阵与其他矩阵的关系
正文:
速度雅可比矩阵是描述物体在运动过程中,速度变化情况的矩阵。
它涉及到物体的速度、加速度以及运动方向等多个因素,是分析物体运动状态的重要工具。
雅可比矩阵本身是一个描述物体运动状态的矩阵,其中包含了物体在各个方向上的加速度信息。
而速度雅可比矩阵则是在此基础上,加入了物体的速度信息,从而能够更加准确地描述物体在运动过程中的状态。
在物体运动中,速度雅可比矩阵可以用于分析物体的运动轨迹、速度变化以及受力情况等多个因素,从而对物体的运动状态进行准确的预测和控制。
此外,速度雅可比矩阵还可以与其他矩阵进行结合,如运动雅可比矩阵、位置雅可比矩阵等,以得到更全面、更准确的物体运动信息。
机器人运动学雅可比矩阵

05 雅可比矩阵的优化与改进
雅可比矩阵的稳定性分析
稳定性分析的重要性
在机器人运动控制中,雅可比矩阵的稳定性对机器人的运动性能 和动态响应具有重要影响。
稳定性判据
通过分析雅可比矩阵的特征值和特征向量,可以确定机器人的运动 稳定性,并为其运动控制提供依据。
通常使用齐次变换矩阵来表示机器人的位姿,该矩阵包含 了平移和旋转信息,能够完整地描述机器人在空间中的位 置和方向。
坐标系与变换
01
坐标系是用来描述物体在空间中位置和姿态的参照框架。
02
在机器人学中,通常使用固连于机器人基座的坐标系作为全局 参考坐标系,以及固连于机器人末端执行器的坐标系作为局部
参考坐标系。
THANKS FOR WATCHING
感谢您的观看
雅可比矩阵的物理意义
雅可比矩阵描述了机械臂末端执行器 的位置和姿态随关节变量变化的规律, 是机械臂运动学分析中的重要概念。
通过雅可比矩阵,可以分析机械臂的 可达工作空间、奇异性、运动速度和 加速度等运动学性能。
雅可比矩阵的计算方法
雅可比矩阵可以通过正向运动学和逆 向运动学两种方法计算得到。
在计算雅可比矩阵时,需要使用到线 性代数、微分方程等数学工具。
正向运动学是根据关节变量求解末端 执行器在参考坐标系中的位置和姿态; 逆向运动学是根据末端执行器的位置 和姿态求解关节变量。
04 雅可比矩阵在机器人运动 学中的应用
机器人的关节与连杆
关节
机器人的每个关节都有一个自由 度,决定了机器人的运动方式。 常见的关节类型包括旋转关节和 移动关节。
连杆
第二节 雅可比方法

下面我们详细介绍雅可比方法。首先引进 Rn 中
的平面旋转变换.变换 xi yi cos yi sin
x
j
yi
sin
yi
cos
xk
yk k
i,
j
上页
下页
返回
记为 x Pij y ,其中
第四章 第二节
1
cos
Pij
0.00000 0.00000 3.41421
A9 的对角线元素就是A 的特征值,即
1 0.58758 , 2 2.00000 , 3 3.41421
上页 下页 返回
相应的特征向量为
第四章 第二节
0.50000
0.70710
0.50000
v1 0.70710 , v2 0.00000
这里需要说明一点:并不是对矩阵A的每一对 非对角线非零元素进行一次这样的变换就能得到 对角阵.因为在用变换消去 aij的时候,只有第 i 行, 第 j 行,第 i 列,第 j 列元素在变化,如果 aik或 a jk 为零,经变换后又往往不是零了.
上页 下页 返回
第四章 第二节
雅克比方法就是逐步对矩阵A 进行正交相似变 换,消去非对角线上的非零元素,直到将A的非对角 线元素化为接近与零为止,从而求得A的去全特\征 值,把逐次的正交相似变换矩阵乘起来,便是所要 求的特征向量.
对角线元素平方和比A 的对角元素平方和增加了
2a,ij2 的A非1 对角元素平方和A的非对角元素平方
和减少了2aij2 , 且将事先选定的非对角元素消去了
即aij1 0
上页 下页 返回
第四章 第二节
雅可比

雅可比雅可比(Jacobi,Carl Gustav Jacob),德国数学家。
1804年12月10日生于普鲁士的波茨坦;1851年2月18日卒于柏林。
生平简介雅可比雅可比(Jacobi,Carl Gustav Jacob,1804.12.10-1851.2.18)德国数学家。
生于波茨坦(Patsdam),卒于柏林。
出身于一个富裕的犹太人家庭,其父是银行家。
1816-1820年在波茨坦的中学学习,他掌握的数学知识远远超过学校所讲授的内容.他还自学了L.欧拉(Euler,Leonhard,1707.4.15-1783.9.18)的《无穷小分析引论》(Introductioin analvsin infinitorum),并且试图解五次代数方程。
编辑本段个人履历1821年4月入柏林大学,开始两年的学习生活,他对哲学、古典文学和数学都颇有兴趣。
雅可比最后还是决定全力投身于数学。
1825年获柏林大学哲学博士学位,之后,留校任教。
由于雅可比善于将自己的新观点贯穿在教学之中,并启发学生独立思考,成为学校最受欢迎的数学教师之一。
1826年5月到柯尼斯堡大学任教,1827年12月被任命为副教授,1832年7月为教授。
1827年被选为柏林科学院院士。
他还是伦敦皇家学会会员,还是彼得堡、维也纳、巴黎、马德里等科学院院士。
1842年由于健康不佳而退隐,定居柏林。
1851年2月因患天花而去世,终年不满47岁。
主要贡献雅可比在数学上做出了重大贡献。
他几乎与阿贝尔(Abel,Niels Henrik,1802.8.5-1829.4.6)同时各自独立地发现了椭圆函数,是椭圆函数理论的奠基人之一。
1827年雅可比从陀螺的旋转问题入手,开始对椭圆函数进行研究。
1827年6月在《天文报告》(Astronomische Nachrichten)上发表了《关于椭圆函数变换理论的某些结果》。
1829年发表了《椭圆函数基本新理论》(Fundamenta Nova Theoeiae Functionum Ellipticarum),成为椭圆函数的一本关键性著作。
雅可比坐标形式-概念解析以及定义

雅可比坐标形式-概述说明以及解释1.引言1.1 概述雅可比坐标形式(Jacobian coordinates)是一种坐标表示方法,常用于描述几何图形中的点和曲线。
它在计算机图形学、计算机辅助设计以及几何问题求解中发挥着重要的作用。
随着计算机技术的不断发展,几何计算成为了各个领域中必不可少的一部分。
而雅可比坐标形式作为一种基础的数学工具,可以帮助我们更方便地描述和计算几何图形中的点和曲线的性质。
雅可比坐标形式的定义是通过引入一个额外的坐标来表示原来曲线上的点,从而将原来的二维或三维坐标系扩展到更高维度。
在该坐标系下,我们可以使用一组参数来表示点的位置,而不再局限于传统的笛卡尔坐标系。
雅可比坐标形式有很多优势。
首先,它可以简化曲线和点的运算。
在传统的笛卡尔坐标系下,我们需要复杂的计算公式来描述点的运动和变形,而在雅可比坐标形式下,这些计算可以通过简单的矩阵运算来实现。
此外,雅可比坐标形式还可以用来描述射影几何和非欧几何空间中的点,这些在传统的坐标形式中很难表示。
它为我们研究和解决各种复杂几何问题提供了一种新的方法。
本文将详细介绍雅可比坐标形式的定义和背景,并探讨其在几何问题求解和计算机图形学中的应用。
我们将详细解释雅可比矩阵的性质和计算方法,并举例说明雅可比坐标形式在点和曲线的运算中的实际应用。
在正文部分,我们将对具体的子章节进行讨论,以更深入地了解雅可比坐标形式的各个方面。
最后,在结论部分,我们将对本文进行总结,讨论结果并展望雅可比坐标形式在未来的发展前景。
通过本文的学习,读者将能够掌握雅可比坐标形式的基本概念和相关算法,从而在相关领域中运用这一工具解决实际问题。
文章结构部分的内容如下:1.2 文章结构本文将按照以下结构进行叙述。
首先,在引言中,我们将对雅可比坐标形式的定义和背景进行概述。
接下来,我们将详细介绍雅可比矩阵及其性质,以便读者能够更好地理解雅可比坐标的应用。
然后,我们将在正文部分分别讨论雅可比坐标形式的四个子章节,这些子章节将介绍不同方面的应用实例和相关概念。
雅可比结构-解释说明

雅可比结构-概述说明以及解释1.引言1.1 概述雅可比结构是一种特殊的数学模型,它在许多领域具有重要的应用价值。
本文旨在对雅可比结构进行全面的介绍和分析,包括其定义与特点、应用领域、优势与局限性等方面。
通过对雅可比结构的深入探讨,我们可以更好地理解其重要性,并展望其在未来的发展方向。
通过本文的阐述,读者将能够更全面地了解雅可比结构在现代科学与工程领域的作用和潜力。
1.2 文章结构文章结构部分的内容:文章结构部分主要是对本篇文章的整体结构进行介绍,为读者提供一个整体的概览。
本文分为引言、正文和结论三个部分。
在引言部分,我们将对雅可比结构进行概述,并介绍本文的结构和目的。
在正文部分,我们将详细介绍雅可比结构的定义与特点、应用领域以及其优势与局限性。
最后,在结论部分,我们将总结雅可比结构的重要性,展望其未来发展,并得出结论。
通过这样的结构安排,读者可以清晰地了解本文的内容和逻辑。
1.3 目的目的部分:本文的目的在于深入探讨雅可比结构在工程和科学领域中的重要性和应用。
通过对雅可比结构的定义与特点、应用领域、优势与局限性进行分析,旨在让读者更全面地了解雅可比结构的概念和作用。
同时,本文还将就雅可比结构的未来发展进行展望,以及总结其在工程和科学领域中的重要性。
通过本文的阐述,希望读者能够更加深入地理解雅可比结构,并对其在实际应用中的意义有更清晰的认识。
2.正文2.1 雅可比结构的定义与特点雅可比结构是一种特殊的数学结构,用于描述多变量函数之间的关系。
它通常用于解决优化问题和求解非线性方程组。
雅可比结构的主要特点包括:可逆性、线性性和局部性。
首先,雅可比结构是可逆的,意味着它可以通过矩阵的逆转换来描述函数之间的关系。
这使得雅可比结构在求解反问题和优化问题时具有重要的作用。
其次,雅可比结构具有线性性,即它可以用线性方程描述函数之间的变化关系,这极大地简化了对函数的分析和求解过程。
最后,雅可比结构具有局部性,即它只描述函数在某一点附近的变化关系,而不受其他点的影响。
雅可比矩阵的定义
雅可比矩阵的定义
嘿,大家知道什么是雅可比矩阵吗?这可是个很有意思的东西呢!雅可比矩阵就像是一个神秘的“魔法矩阵”。
咱先来说说,雅可比矩阵它其实是向量函数的一阶偏导数以一定方式排列成的矩阵。
这听着是不是有点晕乎?别急,咱举个例子哈。
比如说有个函数,它能把一组数变成另一组数,就像变魔术一样。
而雅可比矩阵呢,就是描述这个“变魔术过程”的一种工具。
它有啥用呢?哎呀,用处可大啦!它可以帮助我们理解和分析很多复杂的现象和过程呢。
比如说在物理中,研究一些变化的系统时,雅可比矩阵就能派上大用场。
它就像是一个“导航仪”,能让我们更清楚地看到变化的方向和程度。
想象一下,我们在一个迷宫里,雅可比矩阵就是那个能告诉我们该往哪儿走、怎么走更容易的指南。
它能告诉我们在某个点上,不同方向的变化趋势是怎样的。
这多厉害呀!
而且哦,雅可比矩阵在数学的很多领域都有重要的应用呢。
比如在微分几何中,它可是个关键角色。
它能帮助我们研究曲面的性质,就像给曲面做了一次全面的“体检”。
你说,这么重要又有趣的雅可比矩阵,是不是值得我们好好去了解和探索一下呢?我觉得真的是超级有意思的呀!总之,雅可比矩阵是一个非常强大和有用的工具,在很多领域都有着不可或缺的地位。
机器人雅可比矩阵

根据机器人运动状态和任务需求,动态调整雅可比矩阵的维度, 以适应不同情况下的计算需求。
雅可比矩阵的奇异性问题
1 2
奇异值分解
利用奇异值分解(SVD)等技术处理雅可比矩阵 的奇异性问题,提高矩阵的稳定性和可靠性。
冗余自由度
合理配置机器人的冗余自由度,避免产生奇异位 姿,提高机器人的运动能力和灵活性。
。
逆向运动学
03
已知机器人在笛卡尔空间中的位姿,求解关节空间的运动变量
,进而得到雅可比矩阵。
03
雅可比矩阵的应用
机器人的运动学正解与逆解
01
02
03
运动学正解
通过给定的关节角度,计 算机器人末端执行器的位 置和姿态。
运动学逆解
已知末端执行器的位置和 姿态,反推出各关节角度 。
求解方法
通过几何学和线性代数的 方法,建立机器人运动学 模型,并使用数值计算方 法求解正解和逆解。
3
动态调整
根据机器人运动状态和任务需求,动态调整雅可 比矩阵的结构,以避免奇异性问题。
雅可比矩阵的实时计算优化
并行计算
采用并行计算技术,将雅可比矩阵的计算任务分解为多个子任务, 提高计算效率。
预计算和缓存
对雅可比矩阵进行预计算和缓存,减少实时计算量,提高计算速度 。
自适应算法
采用自适应算法优化雅可比矩阵的计算过程,根据机器人运动状态和 任务需求动态调整计算参数,提高计算精度和响应速度。
力矩控制
通过调节施加在机器人关节上的力矩,实现对机器人运动的精确控 制。
控制方法
基于反馈的力/力矩控制方法,如PID控制器、模糊控制器等。
04
雅可比矩阵的优化与改进
雅可比矩阵的降维处理
雅可比行列式分布积分
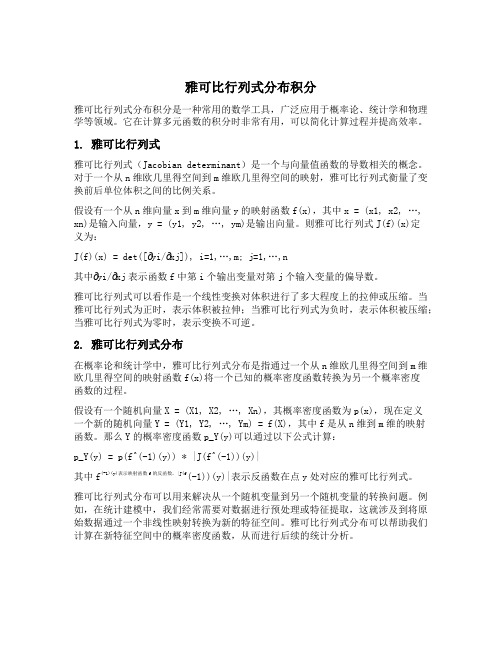
雅可比行列式分布积分雅可比行列式分布积分是一种常用的数学工具,广泛应用于概率论、统计学和物理学等领域。
它在计算多元函数的积分时非常有用,可以简化计算过程并提高效率。
1. 雅可比行列式雅可比行列式(Jacobian determinant)是一个与向量值函数的导数相关的概念。
对于一个从n维欧几里得空间到m维欧几里得空间的映射,雅可比行列式衡量了变换前后单位体积之间的比例关系。
假设有一个从n维向量x到m维向量y的映射函数f(x),其中x = (x1, x2, …, xn)是输入向量,y = (y1, y2, …, ym)是输出向量。
则雅可比行列式J(f)(x)定义为:J(f)(x) = det([∂yi/∂xj]), i=1,…,m; j=1,…,n其中∂yi/∂xj表示函数f中第i个输出变量对第j个输入变量的偏导数。
雅可比行列式可以看作是一个线性变换对体积进行了多大程度上的拉伸或压缩。
当雅可比行列式为正时,表示体积被拉伸;当雅可比行列式为负时,表示体积被压缩;当雅可比行列式为零时,表示变换不可逆。
2. 雅可比行列式分布在概率论和统计学中,雅可比行列式分布是指通过一个从n维欧几里得空间到m维欧几里得空间的映射函数f(x)将一个已知的概率密度函数转换为另一个概率密度函数的过程。
假设有一个随机向量X = (X1, X2, …, Xn),其概率密度函数为p(x),现在定义一个新的随机向量Y = (Y1, Y2, …, Ym) = f(X),其中f是从n维到m维的映射函数。
那么Y的概率密度函数p_Y(y)可以通过以下公式计算:p_Y(y) = p(f^(-1)(y)) * |J(f^(-1))(y)|其中f(-1)(y)表示映射函数f的反函数,|J(f(-1))(y)|表示反函数在点y处对应的雅可比行列式。
雅可比行列式分布可以用来解决从一个随机变量到另一个随机变量的转换问题。
例如,在统计建模中,我们经常需要对数据进行预处理或特征提取,这就涉及到将原始数据通过一个非线性映射转换为新的特征空间。
雅可比方法

第二节 雅可比方法雅可比方法是用来计算实对称矩阵A 的全部特征值及其相应特征向量的一种变换方法.在介绍雅可比方法之前,先介绍方法中需要用到的线性代数知识与平面上的旋转变换.一 预备知识(1) 如果n 阶方阵A 满足()A A I A A T ==-1即则称A 为正交阵.(2) 设A 是n 阶实对称矩阵,则A 的特征值都是实数,并且有互相正交的n 个特征向量.(3) 相似矩阵具有相同的特征值.(4) 设A 是n 阶实对称矩阵,P 为n 阶正交阵,则AP P B T =也是对称矩阵.(5) n 阶正交矩阵的乘积是正交矩阵.(6) 设A 是n 阶实对称矩阵,则必有正交矩阵P ,使∧=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=n T AP P λλλ 21 (1)其中Λ的对角线元素的是A 的n 个特征值,正交阵P 的第i 列是A 的对应于特征值i λ的特征向量.由(6)可知,对于任意的n 阶实对称矩阵A ,只要能求得一个正交阵P ,使Λ=AP P T (Λ为对角阵),则可得到A 的全部特征值及其相应的特征向量,这就是雅可比方法的理论基础.二 旋转变换设⎥⎦⎤⎢⎣⎡=22211211a a a aA 为二阶实对称矩阵,即2112a a =.因为实对称矩阵与二次型是一一对应的,设A 对应的二次型为()222221122111212x a x x a x a x ,x f ++= (2)由解析几何知识知道,方程()C x ,x f =21表示在21x ,x 平面上的一条二次曲线.如果将坐标轴21Ox ,Ox 旋转一个角度θ,使得旋转后的坐标轴21Oy ,Oy 与该二次曲线的主轴重合,如图4-1所示,则在新的坐标系中,二次曲线的方程就化成C y y =+222211λλ (3) 这个变换就是⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡2121y y cos sin sin cos x x θθθθ (4)变换(4)把坐标轴进行旋转,所以称为旋转变换.其中⎥⎦⎤⎢⎣⎡-=θθθθcos sin sin cos P (5) 称为平面旋转矩阵。
雅克比行列式

雅克比行列式
雅可比行列式(Jacobian determinant)是对多元函数的偏导数进行求导后得到的行列式。
雅可比行列式在微积分和计算几何中具有重要的应用。
假设有对于n个变量和m个函数的n元函数系统:
f1(x1, x2, ..., xn) = 0
f2(x1, x2, ..., xn) = 0
...
fm(x1, x2, ..., xn) = 0
其中,每个函数fi表示用变量x1到xn表示的一个方程。
那么雅可比行列式定义为:
J(x1, x2, ..., xn) = |∂(f1, f2, ..., fm) / ∂(x1, x2, ..., xn)|
其中∂(f1, f2, ..., fm)是一个m × n的矩阵,根据每个函数对变量的偏导数来构成矩阵。
而∂(x1, x2, ..., xn)则是和∂(f1, f2, ..., fm)对应位置的单位矩阵。
雅可比行列式的求值可以通过求解对应的偏导数并计算行列式的值。
在计算几何中,雅可比行列式可以用来描述坐标变换的缩放因子,
它在面积、体积等的计算中有重要的应用。
总结起来,雅可比行列式是描述多元函数的偏导数在对应点处的变
化率,它在微积分和计算几何中都有广泛的应用。
雅可比矩阵的形式

雅可比矩阵的形式【原创版】目录1.雅可比矩阵的定义2.雅可比矩阵的形式3.雅可比矩阵的性质4.雅可比矩阵的应用正文1.雅可比矩阵的定义雅可比矩阵是一种特殊的方阵,它可以通过给定向量空间中的基底进行线性变换得到。
设 $V$ 是一个 $n$ 维向量空间,$B$ 是 $V$ 的一个基底,$A$ 是一个 $ntimes n$ 的方阵,若存在一个可逆矩阵 $P$,使得$P^{-1}AP=J$,其中 $J$ 是 $n$ 阶单位矩阵,那么矩阵 $A$ 就被称为雅可比矩阵。
2.雅可比矩阵的形式雅可比矩阵的形式可以通过它的标准型来描述。
设 $A$ 是一个$ntimes n$ 的雅可比矩阵,通过一系列的初等行变换(交换行、倍加行或者数乘行),我们可以将 $A$ 变为如下形式:$$A = begin{bmatrix}lambda_1 & & & && lambda_2 & & && & ddots & && & & lambda_n &end{bmatrix}$$其中,$lambda_1, lambda_2, ldots, lambda_n$ 是 $A$ 的 n 个特征值。
这种形式被称为雅可比标准型,其中对角线上的元素被称为雅可比元素。
3.雅可比矩阵的性质雅可比矩阵具有以下几个重要的性质:(1)雅可比矩阵一定是方阵。
(2)雅可比矩阵的行列式等于它的特征值之积。
(3)雅可比矩阵的特征值是实数。
(4)雅可比矩阵的特征向量构成了它的标准正交基。
4.雅可比矩阵的应用雅可比矩阵在向量空间和矩阵的变换中具有广泛的应用,例如:(1)线性变换:设 $V$ 是一个 $n$ 维向量空间,$B$ 是 $V$ 的一个基底,$A$ 是一个 $ntimes n$ 的雅可比矩阵,则 $A$ 对 $B$ 进行线性变换后得到的新基底 $B_A$ 也是 $V$ 的一个基底。
雅可比行列式详述解析

雅可比行列式是线性代数中一个重要的概念,它在诸多领域如计算机图形学、物理学和概率论等中都有广泛的应用。
雅可比行列式的计算方法和性质非常有趣且具有重要性。
本文将详细解析雅可比行列式的相关概念和性质,并探讨其在实际应用中的作用和意义。
一、雅可比行列式的定义和计算方法雅可比行列式是由一组向量的偏导数组成的行列式。
假设有n个变量x1, x2, …, xn,它们的偏导数分别为∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn,那么雅可比行列式的定义可以表示为:J = | ∂f/∂x1 ∂f/∂x2 … ∂f/∂xn | … | ∂f/∂xn1 ∂f/∂xn2 … ∂f/∂xnn |其中,J表示雅可比行列式,∂f/∂xi表示函数f对变量xi的偏导数。
计算雅可比行列式的方法是通过依次计算对应位置的元素的行列式值,并根据行列式的性质求和。
具体计算步骤如下:1.计算第一行的元素,即∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn对应的值;2.计算第二行的元素,即∂f/∂xn1, ∂f/∂xn2, …, ∂f/∂xnn对应的值;3.以此类推,计算剩余行的元素;4.将每行计算出的元素值进行相乘,并按正负号进行交替相加,得到行列式的值。
对于二维情况下的雅可比行列式,即两个变量x和y,雅可比行列式的计算公式为:J = ∂(f1, f2)/∂(x, y) = (∂f1/∂x * ∂f2/∂y) - (∂f1/∂y * ∂f2/∂x)二、雅可比行列式的性质和意义雅可比行列式具有以下重要性质和意义:1.表示变量间的关系:雅可比行列式描述了变量之间的关系,可以用来衡量变化率和相关性。
当雅可比行列式的值为正时,表示变量之间是正相关的;当值为负时,则表示变量之间是负相关的。
2.衡量体积变化率:在多元函数中,雅可比行列式可以用来描述空间中体积的变化率。
具体地说,雅可比行列式的绝对值表示体积的变化率,而符号表示体积的方向。
3.判定坐标变换:雅可比行列式可以用于判定坐标变换的是否保持体积不变。
常用十个雅可比展开公式

常用十个雅可比展开公式雅可比展开是一种求解多项式的方法,常用于高等数学、线性代数等诸多领域。
本文介绍了十个常用的雅可比展开公式,这些公式可以帮助您简化复杂的多项式运算并快速求解。
1. 一次雅可比展开公式:当两个变量相等时,一次雅可比展开公式可以简化为一次多项式。
2. 二次雅可比展开公式:二次雅可比展开公式适用于求解二次多项式,可以将二次多项式表示为一次和零次多项式的和。
3. 三次雅可比展开公式:三次雅可比展开公式可以将三次多项式表示为二次、一次和零次多项式的和。
4. 四次雅可比展开公式:四次雅可比展开公式适用于求解四次多项式,可以将四次多项式表示为三次、二次、一次和零次多项式的和。
5. 五次雅可比展开公式:五次雅可比展开公式可以将五次多项式表示为四次、三次、二次、一次和零次多项式的和。
6. 六次雅可比展开公式:六次雅可比展开公式适用于求解六次多项式,可以将六次多项式表示为五次、四次、三次、二次、一次和零次多项式的和。
7. 七次雅可比展开公式:七次雅可比展开公式可以将七次多项式表示为六次、五次、四次、三次、二次、一次和零次多项式的和。
8. 八次雅可比展开公式:八次雅可比展开公式适用于求解八次多项式,可以将八次多项式表示为七次、六次、五次、四次、三次、二次、一次和零次多项式的和。
9. 九次雅可比展开公式:九次雅可比展开公式可以将九次多项式表示为八次、七次、六次、五次、四次、三次、二次、一次和零次多项式的和。
10. 十次雅可比展开公式:十次雅可比展开公式适用于求解十次多项式,可以将十次多项式表示为九次、八次、七次、六次、五次、四次、三次、二次、一次和零次多项式的和。
这些常用雅可比展开公式可以帮助您进行多项式计算和求解,在数学领域的各种问题中都有着广泛的应用。
注意:本文所提供的内容都是基于已确认的信息,若有不确定的内容,请参考相关权威资料进行验证。
二重积分雅可比行列式

二重积分雅可比行列式雅可比行列式是在二重积分中的一种非常重要的工具,它在计算坐标变换后的积分时起到了至关重要的作用。
本文将介绍雅可比行列式的概念、计算方法以及其在二重积分中的应用。
首先,我们来了解一下雅可比行列式的定义。
在二维平面上,我们常常需要进行坐标变换,例如从直角坐标系转换到极坐标系。
当我们进行这种变换时,坐标系中的点会发生变化,其对应的面积也会发生变化。
而雅可比行列式就是用来衡量这种变化的比例因子。
具体来说,设在平面上有由直角坐标系(x, y)到另一种坐标系(u, v)的变换规则给出。
我们可以把这个变换规则写成如下的形式:u = f(x, y)v = g(x, y)其中,f和g是连续可微的函数。
那么在变换之后的坐标系中,一个面积元素dudv的大小是多少呢?这个问题就可以通过雅可比行列式来回答。
雅可比行列式的定义为:J = |∂(u, v)/∂(x, y)|其中,∂(u, v)/∂(x, y)表示变换规则的偏导数矩阵。
对于二维平面上的变换,它可以写成如下的形式:J = |∂u/∂x ∂u/∂y||∂v/∂x ∂v/∂y|这个行列式的值描述了坐标变换对面积的影响,它告诉我们在坐标变换之后,一个微小的面积元素dxdy会变成多大。
接下来,我们来看一下如何计算雅可比行列式。
首先,我们需要计算每个变换坐标的偏导数。
然后,将这些偏导数组成一个2×2的矩阵,再计算该矩阵的行列式,即可得到雅可比行列式的值。
雅可比行列式的计算方法如下:J = ∂u/∂x * ∂v/∂y - ∂u/∂y * ∂v/∂x通过计算雅可比行列式,我们可以得到坐标变换对面积的影响。
在实际问题中,我们常常需要将积分从一个坐标系转换到另一个坐标系。
而这就需要用到雅可比行列式。
雅可比行列式在二重积分中的应用非常广泛。
在进行变量替换时,我们需要根据具体的变换规则,计算出雅可比行列式的值,并将其作为变换的比例因子加入到积分式中。
这样,我们就可以正确地计算出变换后的积分结果。
雅可比行列式二重积分换元证明

雅可比行列式二重积分换元证明好,今天咱们聊聊雅可比行列式和二重积分换元,想要用简单的语言搞懂这件事其实不难。
别看这两个名字一听就很“高大上”,其实它们的原理和背后逻辑并没有大家想象的那么复杂。
话说回来,数学这东西,很多时候就像咱们做饭,哪怕是做一道复杂的菜,拆开来看,所有的原料和步骤也不过是那么几个。
比如,咱们今天就用换元法的方式来看这个问题,别着急,跟着我一块慢慢捋。
咱们要知道啥叫二重积分。
咱们不说复杂的东西,就说它本质上就是在一个区域内求和,它是在平面上计算面积、体积之类的东西的。
想象一下,如果你在一个地方想要算个面积,但这地方形状不规整,直接算也不好算,那怎么办?这时候就得换个方式了。
换元法就像是给你一副魔法眼镜,戴上之后你就能把这些麻烦的形状变得规整起来,像魔术一样,啥都能算出来。
不过,换元法的背后可不简单。
就像是咱们做饭的时候,不是随便扔点盐就能做好菜的,得讲究火候,得注意配比。
换元法也一样,换了变量之后,咱们原本的积分区域变了,积分函数也发生了变化,这时候就得有个东西来“保证”换元后计算的正确性——这就是雅可比行列式的作用。
先别急着问雅可比行列式是什么,想清楚一点:换元的核心目的,是把原来复杂的积分问题转化成一个简单的、能直接求解的形式。
这就好比咱们去旅行,行李太多怎么办?你得先有个车把它们装进去,到了地方再一点点拿出来。
雅可比行列式,就像是这个车,它把原来的“空间”拉平、拉伸或者压缩,从而保证你不丢失任何重要的信息。
你说它简单不?其实不简单,不过大家可以把它想象成一种“空间调整”工具,关键时刻让一切变得顺畅。
好了,讲到这,咱们再来说说雅可比行列式到底是个啥玩意。
它的核心原理就是帮助你理解不同坐标系下的变化。
我们知道,二重积分的本质就是在平面内做加法,积分的范围通常是一个平面区域。
换元之后,新区域的形状可能和原来完全不一样,这时雅可比行列式就派上用场了,它通过计算一个特定的矩阵,来“量化”这个区域的变化,告诉你怎么去调整积分的权重,才能保证最后的结果不变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雅可比中国科学院数学研究所井竹君雅可比,C.G.J.(Jacobi Carl Gustar Jacob)1804年12月10日生于德国波茨坦;1851年2月18日卒于柏林.数学.雅可比是犹太银行家西蒙·雅可比(Simon Jacobi)和他的妻子莱曼(Lehmann)的第二个儿子.雅可比有一个长他三岁的哥哥莫里茨(Moritz),后来在彼得堡成为著名的物理学家.弟弟爱德华(Eduard)在其父去世后掌管了银行.他还有个妹妹雷泽(Therese).雅可比自幼聪敏,幼年随他舅舅学习拉丁文和数学.1816年11月进入波茨坦大学预科学习.1821年春毕业.当时他的希腊语、拉丁语和历史的成绩都很优异;尤其在数学方面,他掌握的知识远远超过学校所教授的内容.他还自学了L.欧拉(Euler)的《无穷小分析引论》(Introductioin analvsin infinitorum),并且试图解五次代数方程.1821年4月雅可比入柏林大学.开始两年的学习生活,他对哲学、古典文学和数学都颇有兴趣.该校的校长评价说,从一开始,雅可比就显示出他是一个“全才”.像C.F.高斯(Gauss)一样,要不是数学强烈地吸引着他,他很可能在语言学上取得很高成就.雅可比最后还是决定全力投身于数学.1825年8月,他获得柏林大学理学博士学位.之后,留校任教.1825年到1826年冬季,他主讲关于三维空间曲线和曲面的解析理论课程.年仅21岁的雅可比善于将目己的新观点贯穿在教学之中,启发学生独立思考,是当时最吸引人的数学教师.他的成功引起普鲁士教育部的注意.1826年5月,雅可比到柯尼斯堡大学任教.在那里他结识了物理学家F.诺伊曼(Neumann)和H.多费(Dove)、数学家F.贝塞尔(Bessel).一年之后,发表了几篇关于数论中有关互反律(后人称为“雅可比符号的互反律”)的论文,受到高斯的赞赏.由此开始数学创作的黄金时代.1827年12月获得副教授职位,这次提升与高斯、A.M.勒让德(Legendre)对他早期工作的赞扬有关(而高斯不是一个轻易表态的人).1829年发表了他的第一部杰作《椭圆函数理论新基础》(Fundamenta Nova Theoriae Funcctionurn Ellipticaram,1829,见《雅可比全集》第一卷).同年夏天雅可比去巴黎旅行,途中访问了在格丁根的高斯,并结识了勒让德、J.B.J.傅里叶(Fourier)、S.D.泊松(Poisson)和其他法国数学家.1832年7月被提升为教授.在此前一年,即1831年9月11日与玛丽·施温克(Marie Schwinck)结婚,他们生有5个儿子和3个女儿.1842年7月受普鲁士国王的派遣,和贝塞尔参加在曼彻斯特举行的不列颠科学促进协会(British Associationfor the Advancement of Science)的年会,回国途中在巴黎科学院作了报告.在柯尼斯堡大学的18年间,雅可比不知疲倦地工作着,在科学研究和教学上都做出惊人的成绩.他对椭圆函数理论的透彻研究在数学界引起轰动,从而与N.H.阿贝尔(Abel)齐名.雅可比在椭圆函数理论、数学分析、数论、几何学、力学方面的主要论文都发表在克雷勒的《纯粹和应用数学》杂志(Crelle’s Journal fürdie reine und angewardte Mathematik)上,平均每期有三篇雅可比的文章.这使他很快获得国际声誉.他孜孜不倦的研究工作并没有影响他的教学活动.每周要用8—10小时给学生讲解他喜爱的课程——椭圆函数理论,并将自己的研究精髓教给学生,使学生受到科研的熏陶,打破了常规的教学方法.他还开创了学术讨论班,这在当时数学界还是很新奇的事物.当时,他同数学家贝塞尔、物理学家F.诺伊曼三人成为德国数学复兴的核心.1843年初雅可比患了严重的糖尿病.在得到普鲁士国王的捐款之后去意大利休假数月.1844年6月底回到柏林,开始接受普鲁士国王的津贴,在柏林大学任教,并被选为柏林科学院院士、伦敦皇家学会会员.1848年革命期间,由于他在一次即席演讲中得罪了王室而失去津贴.当维也纳大学决定聘请他时,普鲁士当局意识到他的离开将会造成的损失,因而恢复了他的待遇.1851年初雅可比在患流行性感冒还未痊愈时,又得了天花,不久去世.他的密友P.G.L.狄利克雷(Dirichlet)在柏林科学院发表纪念讲话,总结了他在数学上的杰出贡献,称他为J.L.拉格朗日(Lagrange)以来科学院成员中最卓越的数学家.雅可比最重要的贡献是和挪威数学家N.H.阿贝尔(Abel)相互独立地创立和发展了椭圆函数理论;引入并研究了θ函数和其他一些超越函数的性质;大胆地使用复数,发展了复变量椭圆函数.他的第一部杰作《椭圆函数理论新基础》成为该领域的经典著作.该著作的第一部分研究变换问题,第二部分给出椭圆函数的表示.在第一部分中,雅可比从第一类椭圆函数的微分出发,用二次变换将它化简为勒让德的标准出了三次和五次变换的例子和有关模方程的例子.经组合两个变换,他圆积分sinam(iu,k)=itan am(u,k′),这里模数k和k′满足方程k2+k′2=1.这样,他得到椭圆函数的双周期性、零点、极点.他还证明当对第一个模数和第二个模数应用同样变换时模方程的不变性.第一部分工作的最后,他研究了满足所有变换模数的三阶微分方程.这著作的第二部分集中研究椭圆函数用无穷级数乘积和傅里叶级数的表示问题.椭圆函数sin amu,cos amu,△amu的第一种表示是用无穷乘积的商形式给出.记q=e-πk′/K,雅可比用q来表示模和周期,例如椭圆函数还可用傅里叶级数展开式来表示.雅可比引进函数来讨论第二类椭圆积分.他将第三类椭圆积分化简成第一类和第二类椭圆积分,而第三个超越函数仅依赖于两个变量.他又引入“雅可比函数”公式雅可比又将这工作应用于数论.从恒等式断,即任何整数可以表示成至少四个整数(零也是整数)的平方和.雅可比证明了以e-(an+b)/2为通项的级数的收敛性,这是整个椭圆函数理论发展的基础.1829—1830年冬季,雅可比第一次作椭圆函数理论的报告,他强调双周期性是椭圆函数的基本性质.他用θ函数理论来建立椭圆函数理论.1835—1836年,他证明有关四个θ函数乘积之和的著名定理,并且将各类椭圆函数定义为θ函数之商,从而第一个创立了θ函数理论.1839—1840年期间,他继续这些研究,这部分工作收集在《雅可比全集》的第一集、第二集中,包括了对椭圆函数历史的概述.关于复变量椭圆函数理论,他研究了超椭圆积分等问题,其中有关双周期函数的论文(1835年)成为现代复变函数理论中的经典著作.他对阿贝尔函数也作过研究,发现了超椭圆函数.在椭圆函数理论的整个发展过程中,高斯、勒让德、阿贝尔、雅可比他们对其理论都作过精心研究.阿贝尔和雅可比的许多发现同高斯年青时(1798年)作过的但没有发表的工作(高斯从来不太在乎他的研究论文的发表)相交迭.勒让德自1786年以来用了40年时间对椭圆积分作了系统的研究,并将其分为三类.但阿贝尔和雅可比看到了问题的实质.他们把勒让德的思路颠倒过来,研究椭圆积分的逆,即椭圆函数,这样就大大地简化了整个问题,使得椭圆函数理论迅猛地发展起来.椭圆函数理论在19世纪数学领域中占有十分重要的地位.它为发现和改进复变函数理论中的一般定理创造了有利条件.如果没有椭圆函数理论中的一些特例为复变函数理论提供那么多的线索,那么复变函数理论的发展就会慢得多.雅可比第一个将椭圆函数理论应用于数论的研究,得到同余式和型理论中的一些结果,这一思想为后继数学家所沿用.他这方面的研究结果是通过J.G.罗森海因(Rosenhain)的听课笔记流传下来的.他还给出元根的“标准算法”,该文章于1839年发表.雅可比研究工作的特点是将不同的数学分支联系起来.他将椭圆函数理论用于积分理论、微分方程理论,其中尾乘式原理就是他提出的.他又将椭圆函数理论用于动力学和分析力学,创立了哈密顿-雅可比方程.他寻找最一般的代换,得到哈密顿-雅可比方程积分的新理论.这一方法解决了力学和天文学中一些十分重要的问题,并使微分方程的研究进入一个新的发展时期.后来,A.克莱布什(Clebsch)改进了雅可比的工作;10年之后H.L.F.亥姆霍兹(Helmholcz)把雅可比的力学原理全部用到一般物理学中.雅可比对行列式理论也做了奠基性的工作.1841年初他系统地研究了行列式理论,推广了代数行列式的应用,建立了函数行列式(后来称之为雅可比行列式),并将其应用到函数组的相关性、多重积分的变量变换和偏微分方程的研究中.有关一阶偏微分方程和分析力学的大部分研究工作是他去世之后以“动力学讲义”(Vorlesungenüber Dynamik)为题发表的(1866年由克莱布什发表).雅可比在数学物理方面也做过实质性的贡献.他将椭圆函数理论应用于椭球吸引力的研究和有关旋转流体物质结构理论研究中.C.麦克劳林(Maclanrin)、J.R.达朗贝尔(d′Alembert)、P.S拉普拉斯(Laplace)和J.L.拉格朗日(Lagrange)证明当均匀流体取旋转椭球形状且绕固定轴均匀旋转时,其形状不会改变.而雅可比发现即使流体形状是一般椭球体时,也满足平衡条件.雅可比对数学史的研究也感兴趣.1846年1月作过关于R笛卡儿(Descartes)的通俗演讲,对古希腊数学也作过研究和评论.1840年他制订了出版欧拉著作的计划(因欧拉的孙子发现欧拉有许多文章未发表).有趣的是雅可比关于椭圆函数理论的研究工作同他强大的竞争者阿贝尔的工作保持着平行,他们独立地创立了椭圆函数理论.同时,雅可比有一颗高贵没有偏见的心灵.由于具有慷慨的天性,他毫不妒忌地赞扬了阿贝尔有关证明不能用代数方法得到一般五次方程的解的结果,尽管他对此问题作过探讨而未能得到这样的结论.雅可比在数学和其他学科的许多领域中辛勤地工作过,是数学史上最勤奋的学者之一.他和欧拉对待数学创作具有同样的态度,两者都是多产的作者.就处理繁复的代数问题能力而言,除了20世纪印度数学天才S.拉马努金(Ramanujan)以外,他们两人是无人可匹敌的.他们俩在处理确定问题时都能从巨大的数学方法兵工厂中找到能够解决问题的最好武器.欧拉在纯粹和应用数学之间花费的时间几乎相等,而雅可比更倾向于研究它们内在有关的数学问题.他所理解的数学,有一种强烈的柏拉图(Platonic)格调.现代数学中的许多定理、公式和函数恒等式、方程、积分、曲线、矩阵、根式、行列式以及许多数学符号都冠以雅可比的名字,可见雅可比的成就对后人影响之深.1881—1891年普鲁士科学院陆续出版了由C.W.博尔夏特(Borchardt)等人编辑的七卷《雅可比全集》和增补集,这是雅可比留给世界数学界的珍贵遗产.。