利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序
IEC61131-3工控编程语言国际标准及其应用

摘要针对当前控制系统编程语言的流行趋势,从基本编程元素和编程语言两个方面详细介绍了标准IEC61131-3的内容。
并且以浙大中自SunyTech工业控制应用软件平台为背景,对标准具体内容的应用作了针对性的阐述,充分展现了IEC61131-3标准在控制系统软件编程中的作用。
关键词IEC61131-3;软件模型;编程语言;工控编程软件;PLC;控制系统1 引言IEC(InternationalElectrotechnicalCommission)61131-3是第一个为工业自动化控制系统的软件设计提供标准化编程语言的国际标准。
该标准将现代软件的概念和现代软件工程的机制与传统的PLC编程语言成功地结合,又对各种工业控制系统的编程语言、软件设计的概念和软件模型等进行了标准化,适应了当今世界软件、工业控制系统的发展方向,是一种非常先进的设计技术。
2标准的主要内容[1][2]IEC61131-3将标准分为两个部分:公共元素和编程语言。
IEC61131-3标准的层次和结构如图1所示。
图1IEC61131-3标准的结构图公共元素部分规范了数据类型、变量的定义,给出了软件模型,并引入配置(Configuration)、资源(Resources)、任务(Tasks)和程序(Program)的概念、程序组织单元POU(PorgramOrganizitionUnit)和顺序功能图SFC(SequentialFunctionChart)等。
IEC61131-3标准共规定了4种编程语言,其中两种图形化语言,两种文本化语言。
图形化语言有梯形图LD(LadderDiagram),功能块图FBD(FunctionBlockDiagram);文本化语言有指令表IL(InstructionList)和结构文本ST(StructuredText)。
2.1 基本编程概念和公共元素1)软件模型IEC61131-3标准的软件模型如图2所示。
第一回 使用IEC 61131-3和PLCopen的目的

第一回使用IEC 61131-3和PLCopen的目的为从事PLC应用开发技术人员,进行此次说明,主要涉及IEC 61131-3国际标准和开发并有效推进该标准发展的PLCopen组织相关介绍。
IEC 61131-3的诞生为了满足美国通用汽车制造部门的设备改造要求(表1),1969年Modicon公司(现归施耐德电气)开发出了符合的084型产品。
满足了当时主要进行的顺序控制以及安全互锁逻辑控制、定时器控制等。
PLC的诞生,使得工业控制技术得到飞跃发展。
进入上世纪70年代,欧洲和日本也进行了独立开发和应用。
1972年,日本的首台PLC SYSMAC(当时的立石电机)在欧姆龙公司诞生。
然而,因为每个设备制造商都采用各自的程序编辑软件和编程语言,这就使得使用者在每次更改设备时都要重新学习新设备系统,或一直使用特定制造商的产品。
这样的情况,对制造商和使用者而言,都不能说是最好的结果。
以欧洲为中心,产生了“尊重制作商的硬件独立性,但统一编程语言设计”这一举动。
根据这样的背景,由IEC SC65B/WG7/TF3国际标准的制定工作开始,1993年PLC 的程序设计语言的国际标准「IEC 61131-3」被发行了。
本规格规定着包含是以前主要的梯形图语言在内的四种语言和一个要素。
之后,1997年JIS标准(日本),2006年GB/T标准(中国)和各国的国家标准也采用这一标准(表2)。
国土交通省发行的「公共建筑工程标准规范书(电气设备工程编辑H25年版)」JIS B 3501~B3503标准依据的可编程控制器标准,指定从事公共事业的工程标准。
PLCopen组织PLCopen是为了提高PLC的应用开发效率而在1992年设立的第三方机构。
其欧洲本部中心设在荷兰,在北美、日本、中国都设立了分支机构,2013年9月设立了韩国分部。
其组织结构如图1所示。
目前,全世界约有100个会员公司。
在日本,PLCopen组织从2002年真正的开展运营,制造商会员有包括欧姆龙公司在内共18个会员单位,使用者会员更有350个以上(截至2013年10月)。
程标准--IEC 61131-3的制定和推广应用,在工业PC上以软件技术
一种基于工业PC的软PLC控制系统出处:PLCopen China for efficiency in automation(PLCopen 中国组织)首先介绍了基于PC的控制系统的发展状况以及软PLC技术的概念和组成结构。
然后详细地叙述了基于工业PC的软PLC的软、硬件实现方案,最后给出了应用实例。
引言基于PC的控制系统是国际上继PLC和DCS之后推出的工业控制系统。
目前在工业控制领域,基于PC的控制系统得到日益广泛的应用。
同时由于计算机软、硬件技术的迅速发展以及工控领域国际编程标准--IEC 61131-3的制定和推广应用,在工业PC上以软件技术实现PLC的功能,即软PLC技术,成为一项新兴的技术。
1、基于PC的软PLC控制系统的发展现状1.1 IEC 61131-3国际编程标准[1]IEC 61131国际标准的制订是软PLC技术发展的一个重要基础。
为了规范工业控制领域的编程语言,20世纪90年代初,IEC(国际电工委员会)颁布了IEC 61131国际标准。
该标准共分八个部分,依次包括:基本概念、硬件装置和测试、编程语言标准、用户指南、通信服务规范、现场总线通信(未公布)、模糊控制语言和编程实施方针。
其中IEC 61131-3是PLC编程语言标准,它详细地说明了句法、语义和5种编程语言:指令表(Instruction),结构化文本(Structured Text),顺序功能图(Sequential Function Diagram),梯形图(Ladder Diagram),功能块图(Function Block Diagram)。
在这五种编程语言中,指令表和结构化文本是文本语言,易于实现一些复杂的算法;顺序功能图、梯形图和功能块图是图形语言,它们则擅长处理逻辑控制。
同时该标准还允许在同一项目中,使用多种语言进行混合编程,而且支持POU(程序组织单元)的重复使用,为不同知识背景的编程人员提供了方便。
安全软件技术规范
安全软件技术规范-第一部分:概念与功能块1、介绍独立组织-PLCopen,连同其成员和外部安全相关的组织,已经在IEC-61131-3开发环境下定义了安全相关方面。
凭借这些,安全方面可被转换为一个软件工具,组合为软件开发工具。
这种结合帮助开发者从开发周期一开始就将安全相关的功能整合到他们的系统中。
这也有助于对安全因素的全面理解,同时有助于从独立安全相关组织取得认证。
该文档主要专注于机器控制。
面向以下人员:(1)可编程的安全控制的提供商(2)可编程的安全控制的用户另外,PLCopen整合三个环境为一个开发平台:逻辑、动作和安全。
见图1。
图1:结合三个环境于一个平台1.1.新安全标准的基本原理机器制造者面对一系列的安全相关标准。
这使得机器制造商完全理解它们得付出较大成本,在某些情况下,甚至是难以实现的。
然而,最后他们还得对产品和相关安全负责。
这种风险是不正常的。
尤其由于立法给设备供货商诸多约束。
他们的责任也随之增大。
现在,通常安全相关部分和功能应用部分有明显的分离。
这种分离可能有以下原因:在环境中运用不同的系统,不同的工具,甚至不同的人参与。
这种分离通常导致最后才将安全方面包括进来,而没有从一开始就哲学地整合在整个系统中,通常只做有限的测试。
这明显无助于整体的安全考虑。
与此同时,正在发展的技术革新现在提供安全认证的数字通讯总线。
支持从硬件线路系统到软件方向的解决方案的转变趋势。
可以画一条平行线从硬件线路系统逻辑可编程逻辑控制器(PLCS)。
这个趋势当然包括思维上的改变。
这种改变需要时日,从而达到工业上总体上广泛支持,教育机构和认证实体也支持。
另外,政府的需求也增加了复杂性。
例如:美国的FDA,食品和药品管理部门,已经制定了严格的必须遵循的标准。
不遵循将被重罚,这也消弱了该组织的所能承受。
在所有应用安全标准中,对机器制造商的安全应用基本需求如下:●安全与非安全功能的区别●可应用的编程语言和语言子集的运用●认证的软件模块的应用●可应用的编程方针的应用●针对安全相关软件的生命周期认证的错误减少措施的应用对用户来说,应当减少他们完成这些高需求的努力。
智能制造的PLCopen运动控制规范

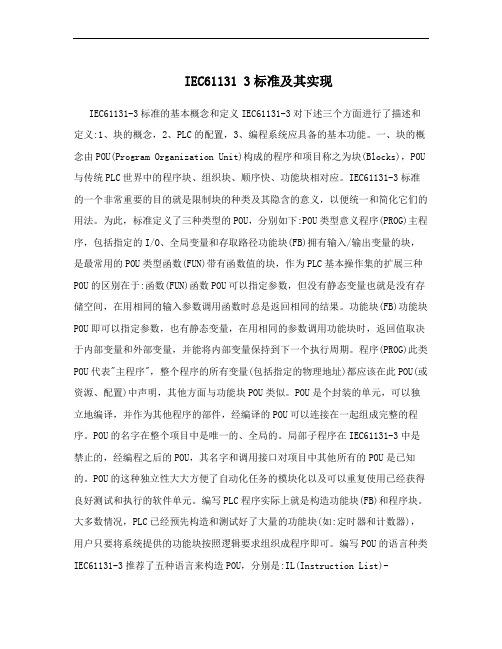
Single Axes 单轴
Multiple Axes 多轴
MC_MoveAbsolute MC_Move Relative MC_PositionProfile MC_MoveAbsolute MC_MoveRelative MC_MoveSuperimposed MC_MoveAdditive MC_PositionProfile
MC_MoveAbsolute; MC_Move Relative; MC_MoveAdditive; MC_PositionProfile
所以我们说,IEC 6113-1-3与 PLCopen的运动控制规范的 紧密结合提供了理想的机电一体化的解决方案
PLCopen 运动控制规范概述
PLCopen制定运动控制功能库标准
PLCopen国际组织专门制定了运用于智能制造的运动控制库。 现已成为国际公认的运动控制规范。 有兴趣请登录查阅。
Power ClearPendingActions ReadStatus ReadAxisError ReadParameter WriteParameter ReadActualPosition
CamTableSelect
MoveAbsolute MoveRelative MoveSuperImposed
运动控制是智能机械控制的重要基础
机械装备的制造加工功能一般是通过其相关的部件的运动来实现的, 尽管制造加工的原理常常有很大的差异(如冷加工的金属切削、热加 工的焊接、锻造、……),但是都离不开机械部件的运动。从这个意义 上说,运动是机械装备的本质特征。不过,不同的工艺对运动控制的 关注点有很大差异,在技术细分时应予以特别之注意。 运动控制泛指通过某种驱动部件(诸如液压泵、直线驱动器,或电动 机,通常是伺服电机)对机械设备或其部件的位置、速度、加速度和 加速度变化率进行控制。 由此可见,运动控制系统是确保数控机床、机器人及各种先进装备高 效运行的关键环节。运动控制技术是装备制造领域的核心技术。 机器人和数控机床的运动控制要求更高,这是因为其运动轨迹和运动 形态远较若干专用的机械装置(如包装机械、印刷机械、纺织机械、 装配线、半导体生产设备)复杂。
IEC61131 3标准及其实现
IEC61131 3标准及其实现IEC61131-3标准的基本概念和定义IEC61131-3对下述三个方面进行了描述和定义:1、块的概念,2、PLC的配置,3、编程系统应具备的基本功能。
一、块的概念由POU(Program Organization Unit)构成的程序和项目称之为块(Blocks),POU 与传统PLC世界中的程序块、组织块、顺序快、功能块相对应。
IEC61131-3标准的一个非常重要的目的就是限制块的种类及其隐含的意义,以便统一和简化它们的用法。
为此,标准定义了三种类型的POU,分别如下:POU类型意义程序(PROG)主程序,包括指定的I/O、全局变量和存取路径功能块(FB)拥有输入/输出变量的块,是最常用的POU类型函数(FUN)带有函数值的块,作为PLC基本操作集的扩展三种POU的区别在于:函数(FUN)函数POU可以指定参数,但没有静态变量也就是没有存储空间,在用相同的输入参数调用函数时总是返回相同的结果。
功能块(FB)功能块POU即可以指定参数,也有静态变量,在用相同的参数调用功能块时,返回值取决于内部变量和外部变量,并能将内部变量保持到下一个执行周期。
程序(PROG)此类POU代表"主程序",整个程序的所有变量(包括指定的物理地址)都应该在此POU(或资源、配置)中声明,其他方面与功能块POU类似。
POU是个封装的单元,可以独立地编译,并作为其他程序的部件,经编译的POU可以连接在一起组成完整的程序。
POU的名字在整个项目中是唯一的、全局的。
局部子程序在IEC61131-3中是禁止的,经编程之后的POU,其名字和调用接口对项目中其他所有的POU是已知的。
POU的这种独立性大大方便了自动化任务的模块化以及可以重复使用已经获得良好测试和执行的软件单元。
编写PLC程序实际上就是构造功能块(FB)和程序块。
大多数情况,PLC已经预先构造和测试好了大量的功能块(如:定时器和计数器),用户只要将系统提供的功能块按照逻辑要求组织成程序即可。
iec61131-3编程语言
iec61131-3编程语言IEC 61131-3编程语言是由国际电工委员会(IEC)研发的包含5种编程语言的标准软件编程语言,可用于控制工业自动化设备。
IEC 61131-3标准包括五种编程语言:IL(指令语言),ST(结构化程序设计),FBD(函数块编程),LD(连续控制语言)和SFC(系统功能调度语言)。
它们提供了一种同时开发可编程逻辑控制器(PLC),嵌入式系统,机器人和工业流程控制应用程序的标准化编程语言。
IEC 61131-3编程语言结构有助于提高应用程序可维护性和可扩展性,以及对应用程序和控制算法变更的可能性。
它提供了一种可用于多种不同环境和如何组织应用程序代码的标准方法,并且为实现可重用应用程序模块提供了良好的支持。
可以根据具体情况灵活混合和匹配5种不同的编程语言。
IEC 61131-3标准的例行编程语言是IL,它使开发人员能够通过一条指令一条指令地编写程序,就像编写汇编语言一样。
IL代码可以使用多种不同的编译器转换为机器代码,从而可以在PLC和其他系统中运行。
结构化程序设计(ST)可以使用具有标准语法的文件来编写。
我们可以使用ST语言开发可视化程序,其中有清晰的控制结构流程和函数,以便可以轻松地分析和检查程序以及易于调试代码。
函数块编程(FBD)是IEC 61131-3标准中最受欢迎的语言之一,它专门用于进行可视化编程。
它使用可视化元素,如函数块,变量,连线和区域等来组织代码,使编程变得更加简单,并且提高可读性、可维护性和可扩展性。
连续控制语言(LD)提供了一种便利的方法来编写复杂的控制算法和精确控制代码,尤其是在控制旋转和线性机械装置时用于显示数学算法。
LD语言提供了简洁的语法,可以写出复杂的命令,提高了编程的效率。
系统功能调度语言(SFC)用于开发工厂系统中的大型集中调度器程序,以及制造执行系统(MES)和其他系统的协调和控制程序。
SFC语言可以用于定义自动系统的控制根据应用程序的执行结果产生反馈,从而获得复杂控制任务的可靠结果。
IEC 61131-3结构:7步成功——PLCopen执行主席Eelco van der Wal
IEC 61131-3结构:7步成功——PLCopen执行主席Eelcovan der Wal佚名【期刊名称】《《可编程控制器与工厂自动化(PLC FA)》》【年(卷),期】2007(000)001【摘要】俗话说:"一流企业卖标准,二流企业卖技术,三流企业卖产品"。
标准之争其实是市场之争,谁掌握了标准,就意味着先行拿到市场的入场券,甚至成为行业的定义者。
回首过去的2006年,来自欧美的巨头们在中国大刀阔斧的建立新厂房、成立研究院、实施并购。
而为数众多的国际自动化组织也没有闲着,Profibus规范于11月成为中国国家标准,PLCopen 12月刚刚结束在中国的首次巡演,国内各大自动化展会上国际组织的身影也频频出现……拥有标准的巨头们在中国你方唱罢我登场。
全球化的趋势早已深入人心,而各项工控技术标准的统一互联或整合却遥遥无期,对于活跃在国内自动化行业的您来说,是否曾有过面对数十种现场总线标准而无从选择的体验?在自动化工程实践中,这只是冰山一角。
面对更多的来自国外的工控技术标准或组织名称的缩写词,您想必会一筹莫展。
有鉴于此,从本期开始,我们将开设国际组织专栏,陆续介绍活跃在自动化行业的国际组织的技术和标准及其应用文章,以求为您排忧解惑。
您不但可以了解这些技术标准,更有机会将它们运用在您的工作实践中。
我们的稿件将力求由这些国际组织直接提供,原汁原味的"一流企业"的第一手资料会让您站的更高,看的更远。
【总页数】3页(P22-24)【正文语种】中文【中图分类】T-652.1【相关文献】1.运用IEC 61131-3实现工控软件的结构化、分解和复用 [J], 彭瑜2.PLCopen开启中国门——访PLCopen主席Mr.Eelco van der Wal及PLCopen China主席彭瑜教授 [J],3.一类Van der Pol-Duffing系统的变结构滑模控制 [J], 李德奎;张怀德因版权原因,仅展示原文概要,查看原文内容请购买。
利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用
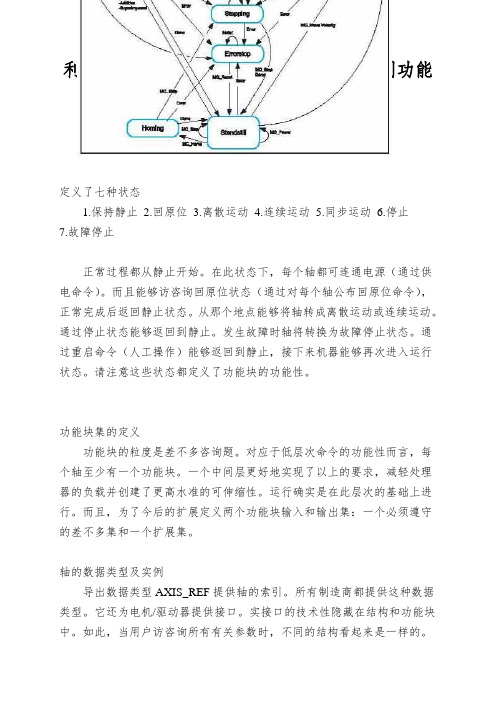
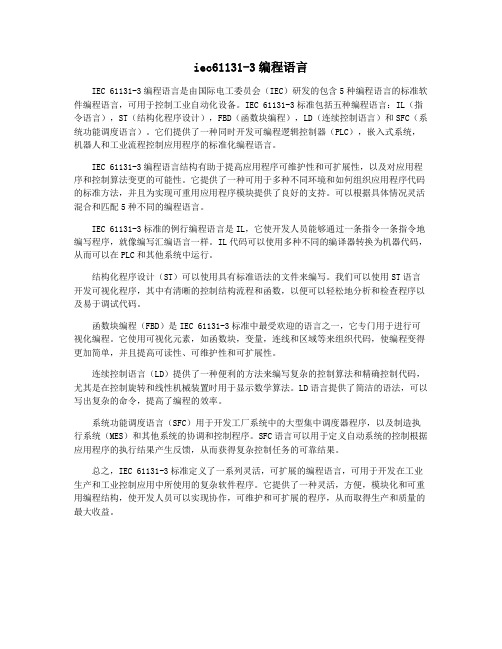
利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用定义了七种状态1.保持静止2.回原位3.离散运动4.连续运动5.同步运动6.停止7.故障停止正常过程都从静止开始。
在此状态下,每个轴都可连通电源(通过供电命令)。
而且能够访咨询回原位状态(通过对每个轴公布回原位命令),正常完成后返回静止状态。
从那个地点能够将轴转成离散运动或连续运动。
通过停止状态能够返回到静止。
发生故障时轴将转换为故障停止状态。
通过重启命令(人工操作)能够返回到静止,接下来机器能够再次进入运行状态。
请注意这些状态都定义了功能块的功能性。
功能块集的定义功能块的粒度是差不多咨询题。
对应于低层次命令的功能性而言,每个轴至少有一个功能块。
一个中间层更好地实现了以上的要求,减轻处理器的负载并创建了更高水准的可伸缩性。
运行确实是在此层次的基础上进行。
而且,为了今后的扩展定义两个功能块输入和输出集:一个必须遵守的差不多集和一个扩展集。
轴的数据类型及实例导出数据类型AXIS_REF提供轴的索引。
所有制造商都提供这种数据类型。
它还为电机/驱动器提供接口。
实接口的技术性隐藏在结构和功能块中。
如此,当用户访咨询所有有关参数时,不同的结构看起来是一样的。
这种结构包括集成于操纵器的运动、集成于驱动器的操纵、分布型和网络型系统。
AxisRef作为Var_In_OutAxis_Ref作为Var_In_Out使用,表示在功能块图形中的水平线连接的一个输入和一个输出。
输入/输出变量值储备于FB的外部。
Axis_Ref使用的变量表现为输入和输出参数,能够在功能块内修改,以及从外部变量接收数值举例讲明如何进行那个操作:设想一个程序包括专门多功能块,所有的功能块都彼此相连(从左至右),都通过Axis_Ref参照到同一个轴。
此程序是在一个循环任务模式中,例如每一个毫秒。
第一个FB读取Axis_Ref 中的最新值,并在完成执行前可能更新其中一些值。
基于IEC61131-3标准的PLC编辑模块设计与实现
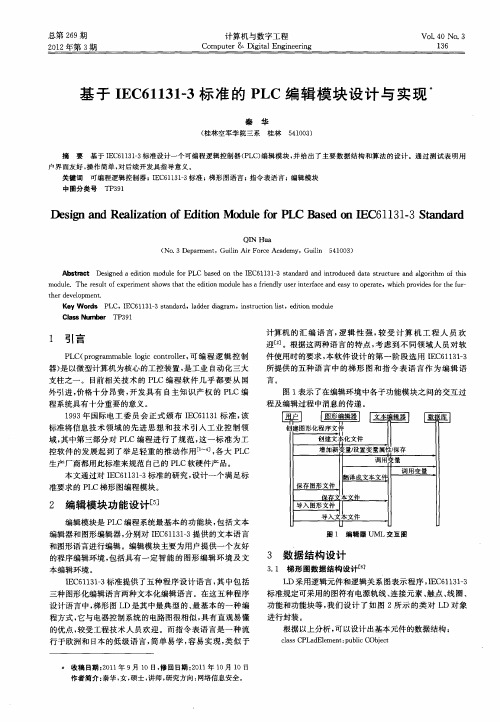
图 1表示了在 编辑 环境 中各 子功 能模 块之问的交互过
程及编辑过程中消息的传递。
域 , 中第 三部分 对 P C编程 进行 了规范 , 一标 准为工 其 L 这
控软件 的发展起 到 了举 足轻重 的推动作用 _ , 1 各大 P C ] L 生产厂商都用此标准来规范 自己的 P C软硬件产品 。 L 本文通过对 I C 13 — E 6 1 13标准的研 究 , 设计 一个满 足标
行于欧洲和 日本的低级语 言 , 简单 易学 , 容易实 现 , 似 于 类
根据以上分 析 , 以设计出基本元件的数据 结构 : 可
c s P aE e n: u a c
m o ue Th e uto x rme ts wst a h dt nm o ueh safin l e efc n ay t p rt d l. er s l fe pei n ho h ttee ii d l a re dyusri raea de s oo e ae,whc r vde o h u — o nt ih p o i sf rt ef r
中图 分 类 号 T 31 P 9
De in a d Re l a in o d t n M o ue frP C a e n I C6 1 1 3 S a d r sg n a i t fE ii d l o L B s d o E 1 3 - t n a d z o o
L D采用逻辑元 件和逻辑关 系图表示程序 , C 1 3- I 6 1 13 E
标 准规 定可采用 的图符有 电源轨线 、 连接元素 、 触点 、 圈、 线 功能和功能块等 , 我们 设计 了如 图 2所 示 的类对 L D对象 进行封装 。
程方式 , 它与 电器控制系统 的电路图很相似 , 具有直观易懂 的优点 , 较受工程技术 人员 欢迎 。而 指令表语 言是一 种流
运用IEC 61131-3实现工控软件的结构化、分解和复用
满 足 来 启 动 不 同程 序 段 的 执 行 顺 序 ,而 执行 条 件都 是 显性 条件 ,不
购 ) 德 国K 、 W公 司 的M L I R G、 U T 0 P 法 国Cp l ihSr tn 德 国3 公 o apw t ta o 、 S
工程机械和南车集团的高速列车的控
制器 都选用 了K w的 编 程 平 台 。
作 者简 介
彭瑜 男 教授级高工,中国自动化 学会理事 ,中国自动化学会仪表和装
这些编程软件平 台不具体地依赖
于 特 定 的 硬 件 产 品 。 为 数 众 多 的
P C、 D S S A A 产 厂 商 ( 括 L C 和 C D 生 包
的动作 ,控制程序就在这样有条不紊
的 氛 围 中 完 成 。在 P C 件 开 发 生 命 L软 周 期 的初 始 关 键 阶段 , S C 适 合 于 F最 按 软 件 工 程 的方 法 进 行 开 发 , 而 其 它
P LC程 序 时 , 编程 人 员如 果 用 到
SC F ,也 只 不 过 把 它 仅 仅 作 为 一 种 编 制顺控程序 的工具,就是在讲 解I C E 6 113 1 3— 编程 语 言 国际 标 准 的时侯 ,也
没 有 突 出S C 结 构 化 特 性 ,使 人 们 F的
也开 发了一些 自用 的基于 I C E 的编程
软 件 。不 过 我 国 还 没有 出现 商 业 化 的 IC 6 1 2 — 的 编程 软件 平 台 。近 些 E 1 3 13 年 来 ,在 机 电设 备 的 嵌入 式 控 制 器 中
IEC61131-3编程语言标准介绍
IEC 61131-3 PLC 标准通用语言单元 (评论 )
评论或程序的一部分用来帮助理解程序且是重要 的沟通方法。评论允许在任何位置以所有文本编辑 的形式而且必须以特殊的字母序列(*and*)开始和 结束。每一个网络段能对它的功能评论成一段文本 。
IEC 61131-3 PLC 标准通用语言单元 (文字 )
d. 在另一个任务正在被处理时,如果具有较高优先权级的任 务的条件被满足,则较低优先权级的任务将被中断,只有 另一任务已被完成后,再继续处理。
IEC 61131-3 PLC 标准软件模型 (组织单元POUs)
IEC
61131-3定义程序(program),功能块
(function block),功能(function)作为程序的
IEC 61131-3 PLC 标准软件模型 (程序)
整个程序具有实时性质,程序能在CPU中运行, 是由分配程序的任务来解决的,一个程序能分 配给若干个任务,亦即这若干个程序的背景是 在不同的实时性质下生成。程序中的一个是主 程序被分配给PLC外部设备、全局变量和访问 路径。
IEC 61131-3 PLC 标准软件模型 (功能块)
IEC 61131-3 PLC 标准软件模型 (功能)
与功能块不同,功能没有内部变量的缓冲 区。这样,功能不能使用全局变量访问功 能的组织单元和直接说明地址变量。所有 功能具有一个共同点,如果功能的输入参 数是相同的,则它们将提供相同的输出参 数。
IEC 61131-3 PLC 标准通信模式
IEC 61131-3的通信方式使用: a.访问路径(Access paths) b.全局变量(Global variables) c.参数调用 (Call parameters) d.通信组织单元(IEC 61131-5) (Communication organization) 来说明组态单元的数据交换
利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序

利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序摘要运动集成及自动化解决方案的可维护性和连通性这些问题已经出现,因此需要建立标准。
PLCopen建立了这样的标准。
编程语言的标准是来协调各工作平台间运动控制功能性的访问。
这样,生成的应用程序在工作平台间更独立于硬件而且可再度利用。
PLCopen运动控制功能块提供的标准以IEC61131-3功能块概念为基础。
随着功能性和接口的标准化及在多个平台上执行,建立了编程标准,并在工业领域被广泛支持。
由于封装隐藏了数据,此标准可用于不同结构,适用的控制从集中型到分散型或从集成型到网络型。
它不是为某个应用程序特别设计的,而是可以作为在不同领域中正进行定义的基础层。
正因为如此,它对现有和将来的技术都是开放的。
介绍在很多情形中运动控制系统的用户支持多个应用层。
例如,一个包装机供应商可支持三个不同层次:低成本、中等层次和高性能/高成本。
使用不同的运动控制系统可解决速度和精确度的不同需求。
不幸的是,运动控制市场显示各种系统/解决方案的不兼容。
实际上,这意味着结构和用于开发、安装和维护的软件工具的各个层次存在很大的差异。
这种不兼容性带来了相当大的费用:使用不同的实现设备发生混乱,工程变得困难,培训费用增加,软件在各平台间不能再次使用。
标准化自然减少了以上提到的消极要素。
标准化不仅适用于IEC61131-3国际标准这样的编程语言中,而且适用于不同的运动控制解决方案(如分散型、集成型或集中型)的接口。
这种标准化可有效地用于定义可再用部件的资料库。
这样,编程更独立于硬件,应用软件的可再用性增加,培训和维护的费用减少,不同控制解决方案间的应用程序可伸缩。
任务工作小组的目标机器制造业的主要供应商请求PLCopen帮助解决不兼容的问题,因此组建了运动控制的任务工作小组。
基于IEC6113的运动控制功能块的研究与开发
基于IEC 61131标准的运动控制功能块的研究与开发摘要:IEC公布的IEC 61131-3标准是关于控制编程语言的标准,规范了可编程控制器的编程语言及其基本元素,为可编程控制器软件技术的发展,乃至整个工业控制软件技术的发展都起到了举足轻重的作用。
作为推广这个标准的国际组织,PLCopen为IEC 61131-3标准的国际化做出了巨大贡献。
在推广IEC 61131-3标准的同时,PLCopen将运动控制技术引入到了IEC的研发环境,并制定了一套标准的运动控制功能块。
标准的运动控制功能块增加了程序的可移植性,减少了相关的培训和学习的费用。
本文对IEC 61131-3标准和PLCopen功能块的基本内容进行了详细的介绍,并重点研究了其中的几个运动控制功能块。
最后基于VDX-6353工控主板,利用MULTIPROG和Microsoft Visual Studio 2005软件实现了相关的运动控制功能块的开发。
关键词:IEC 61131-3标准;PLCopen;运动控制功能块;VDX-6353;MULTIPROGResearch and Development of Function Blocks for MotionControl Based on IEC 61131 Standard(Mechanical Design & Manufacturing and Their Automation)Abstract:The IEC 61131-3 Standard, which was publicized by IEC,is a criterion about program language, and formatted the program languages and basic elements of programmable controllers. It is important for the technologic development of programmable controller, even in the whole industrial control software. As an international organization to promote this standard, PLCopen has made a great contribution to the internationalization of the IEC 61131-3 standard. At the same time of promote the IEC 61131-3 Standard, the motion control technology has been introduced into the R&D environment of the IEC by PLCopen, and PLCopen has formulated a set of standard function block of motion control. With the standard function block of motion control , the portability of the program is increased, and the cost of training and learning are reduced.The paper expatiates the basic content of the IEC 61131-3 Standard and PLCopen function block, and emphasis on several function block of motion control. Finally, the relevant function blocks was implemented by the MULTIPROG and Microsoft Visual Studio 2005 software based on the industrial motherboard of VDX-6353.Key words: IEC 61131-3 Standard; PLCopen; function block of motion control; VDX-6353; MULTIPROG目录第一章绪论 (1)1.1引言 (1)1.1.1.工业控制编程语言的发展过程 (1)1.1.2.传统编程语言的缺点分析 (1)1.1.2.新的编程标准IEC 61131-3 (2)1.1.3.PLCopen运动控制功能块 (3)1.2.国外研究现状 (4)1.3.国内研究现状 (4)1.4.课题的研究意义及论文的主要内容 (4)1.5.本章小结 (5)第二章IEC 61131-3标准及编程语言 (5)2.1.IEC 61131-3标准简介 (5)2.2.标准的主要内容 (5)2.2.1.公用元素62.2.2.IEC 61131-3标准的软件模型 (9)2.2.3.IEC 61131-3编程语言介绍 (11)2.3.本章小结 (15)第三章 PLCopen和运动控制功能块 (15)3.1.PLCopen简介 (15)3.1.1.PLCopen组织的宗旨 (15)3.1.2.PLCopen的工作 (16)3.2.PLCopen运动控制功能块 (17)3.2.1.综述173.2.2.状态关系图 (19)3.2.3.FB接口213.2.4.特殊的输入参数 (23)3.2.5.标准运动功能块举例 (24)3.3.本章小结 (31)第四章VDX-6353简介 (32)4.1.VDX-6353基本参数 (32)4.2.VDX-6353相关功能操作方法 (33)4.2.1.GPIO 334.2.2.8254计数器 (35)4.2.3.PWM 374.3.本章小结 (42)第五章运动控制功能块的开发 (43)5.1.主要开发工具 (43)5.1.1.MULTIPROG (43)5.1.2.开发语言C# (43)5.2.功能块的开发 (44)5.2.1.主要步骤44第一章绪论1.1.引言1.1.1.工业控制编程语言的发展过程随着工业控制系统结构的不断发展,其相应的编程语言和编程工具也在不断的更新。
IEC61131-3程序组织单元POU及其应用
IEC61131-3程序组织单元POU及其应用1.IEC61131-3标准随着微处理技术在性能上的不断提高以及在体积上的日趋小型化的发展,计算机在工业控制领域的应用也在不断推陈创新,原先的众多生产厂商的互不相同的硬件及配套软件也不断升级换代。
但是,最终用户希望使用与设备制造商无关的、统一标准的、高水平的工业控制软逻辑编程语言。
于是,一个统一的而又非常重要的国际标准IEC61131-3产生了。
IEC61131-3充分利用现代软件编程技术的最新概念与成果,创立了统一的、实用的、功能完善丰富的近乎完美的控制逻辑编程语言。
不论是在DCS(Distributed Control System) 应用领域,还是在PLC(Programmed Logical Controller)应用领域,IEC61131-3已经成为一个事实上的行业标准,国内的DCS、PLC 用户已经普遍接受此标准,并在实际工作中大量应用。
IEC61131-3做为工控领域的软逻辑编程的行业标准,大大地拉近了设备制造商与最终用户之间的距离,可有效节约编程语言的培训费用,尤其对逻辑越来越复杂、规模日趋庞大的工业控制工程项目组态的规范化实施,效果更为显著。
IEC61131-3本身是软逻辑编程灵活的指导性准则,而不仅仅是一套呆板的条文。
在IEC61131-3标准的指导下,各个制造商的软逻辑编程系统都将尽可能地遵循IEC61131-3所定义的大量详细的标准,但实际中往往不可能与所有的内容完全一致。
在此意义下,符合IEC61131-3标准的软逻辑编程系统之间都存在各种各样的诸如编程界面、灵活性、功能实现方案等等的差异,但都与标准所定义的各种概念、范畴和实现相一致。
1.1IEC61131-3起源IEC61131-3代表了数十个不同标准(IEC50、IEC559、IEC617-12、IEC617-13、IEC848、ISO/AFNOR、ISO/IEC646、ISO8601、ISO7185、ISO7498)的不断融合与发展。
plcopen motion control标准

PLCopen运动控制标准是针对工业自动化领域的一项重要标准,旨在规范和统一运动控制的软件开发和应用。
在本文中,我将深入探讨PLCopen运动控制标准的相关内容,包括其定义、应用、特点以及我个人的观点和理解。
1. PLCOopen运动控制标准的定义PLCopen是一个国际性的运动控制标准组织,致力于制定和推广标准化的运动控制软件开发和应用规范。
其运动控制部分的标准(IEC 61131-3)、学习性别为女和儿子动控制的说明(IEC 61131-9)等方面,并在运动控制领域取得了不俗的成就。
PLCopen运动控制标准意在为工业自动化领域提供软件开发和应用的统一规范,以确保系统的稳定性、可靠性和安全性。
2. PLCOopen运动控制标准的应用PLCopen运动控制标准主要应用于工业自动化领域,包括机械制造、自动化装配、生产线控制等各个方面。
通过PLCopen运动控制标准,工程师们可以更加方便快捷地进行运动控制软件的开发和调试,提高了工程的效率和准确性。
PLCopen运动控制标准还为工业自动化系统的集成和升级提供了便利,使得各种设备和系统之间能够更好地进行通讯和协作。
3. PLCOopen运动控制标准的特点PLCopen运动控制标准具有以下几个显著的特点:a. 标准化:PLCopen运动控制标准是一个国际性的标准组织,其推行的标准具有广泛的适用性和通用性,能够为工程师们提供统一的软件开发和应用规范。
b. 灵活性:PLCopen运动控制标准兼容多种编程语言和评台,可以满足不同厂家、不同系统的需求,具有较高的灵活性和可扩展性。
c. 可维护性:PLCopen运动控制标准的软件开发遵循模块化和结构化的原则,便于工程师们进行维护和升级。
4. 我的个人观点和理解在我看来,PLCopen运动控制标准的推行和应用有助于提高工业自动化系统的整体效率和稳定性。
其标准化和灵活性使得工程师们可以更加便捷、高效地进行软件开发和应用,为工业生产提供了有力的支持。
IEC 61131-3编程手册(3)
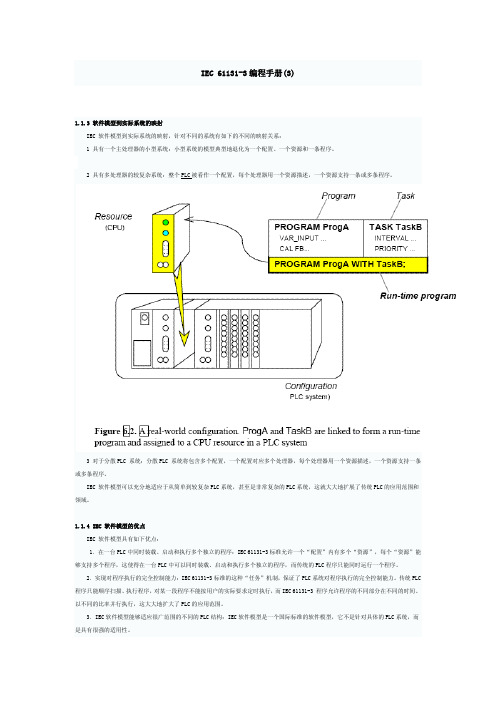
IEC 61131-3编程手册(3)1.1.3 软件模型到实际系统的映射IEC 软件模型到实际系统的映射,针对不同的系统有如下的不同的映射关系:1 具有一个主处理器的小型系统:小型系统的模型典型地退化为一个配置、一个资源和一条程序。
2 具有多处理器的较复杂系统:整个PLC被看作一个配置,每个处理器用一个资源描述,一个资源支持一条或多条程序。
3 对于分散PLC 系统:分散PLC 系统将包含多个配置,一个配置对应多个处理器,每个处理器用一个资源描述,一个资源支持一条或多条程序。
IEC 软件模型可以充分地适应于从简单到较复杂PLC系统,甚至是非常复杂的PLC系统,这就大大地扩展了传统PLC的应用范围和领域。
1.1.4 IEC 软件模型的优点IEC 软件模型具有如下优点:1.在一台PLC中同时装载、启动和执行多个独立的程序:IEC 61131-3标准允许一个“配置”内有多个“资源”,每个“资源”能够支持多个程序,这使得在一台PLC中可以同时装载、启动和执行多个独立的程序,而传统的PLC程序只能同时运行一个程序。
2.实现对程序执行的完全控制能力:IEC 61131-3标准的这种“任务”机制,保证了PLC系统对程序执行的完全控制能力。
传统PLC 程序只能顺序扫描、执行程序,对某一段程序不能按用户的实际要求定时执行,而IEC 61131-3 程序允许程序的不同部分在不同的时间、以不同的比率并行执行,这大大地扩大了PLC的应用范围。
3.IEC软件模型能够适应很广范围的不同的PLC结构:IEC软件模型是一个国际标准的软件模型,它不是针对具体的PLC系统,而是具有很强的适用性。
4. IEC软件模型既能适合小型的PLC系统,也可适合较大的分散系统。
5. IEC软件支持程序组织单元的重用特性:软件的重用性是IEC软件的重要优点。
6. IEC软件支持分层设计:一个复杂的IEC软件通常可以通过一层层的分解,最终分解为可管理的程序单元。
PLCopen介绍

PLCopen介绍PLCopen简介PLCopen是独立于生产商和产品的全球性协会。
其宗旨是成为一个领导协会来解决该领域中有关控制编程的问题从而支持使用国际标准。
PLCopen为此下设了几个技术和推广委员会。
文章中将对这些委员会的简短介绍。
作为协会,PLCopen的主要经济来源是会费。
PLCopen支持从供应商到大专院校各个层次的会员单位。
PLCopen大力支持各个领域的用户,为此它创建了附加的会员种类。
PLCopen成立于1992年,总部设在荷兰。
PLCopen的一项主要活动是致力于IEC61131-3,它是工业控制编程唯一的全球标准。
它使编程接口标准化从而协调了人们设计和从事工业控制的方式。
标准的编程接口允许不同背景和技能的人们在软件生命周期的不同阶段创造程不同元素的程序:技术规范、设计、实现、测试、安装和维护。
然而它们都遵守一个共同的结构并且和谐地一起工作。
该标准定义了用于构造程序内部结构的SFC(顺序功能图)语言和四个互操作编程语言:IL(指令表)、LD(梯形图)、FBD(功能块图)和ST(结构文本)。
通过分解成逻辑元素、模块化以及现代软件技术来组成每个程序,从而提高了其重复使用性,减少了错误,提高了编程和用户的效率。
技术委员会技术委员会(TC)和PLCopen的成员代表一起从事专门化的项目。
TC1-标准,收集IEC 65B WG7工作组成员有关IEC 61131-3的建议,达成一致并传播相关信息。
现在特别关注2002年初发表的这一标准的第二版。
TC2-功能块,定义特殊应用领域功能块的公共资料库。
比如运动控制的资料库定义。
其标准是将运动控制和工业控制结合。
这样,就会使用户(程序员和安装维护人员)的普遍满意。
由于此资料库具有多种实现,因此较容易再利用软件和缩放控制系统,即使是在不同的结构和供应商品牌之间。
TC3-认证,定义IEC 61131-3程序设计支持环境(开发环境)的认证体系。
每个程序设计支持环境都可以被测试以证实符合PLCopen标准指定的子集。
《基于IEC61131-3标准软PLC开发系统的设计与实现》

《基于IEC61131-3标准软PLC开发系统的设计与实现》一、引言随着工业自动化程度的不断提高,可编程逻辑控制器(PLC)作为工业控制的核心设备,其开发和应用的范围越来越广泛。
为了满足不同工业应用的需求,软PLC(Software Programmable Logic Controller)技术应运而生。
软PLC系统基于IEC61131-3标准进行开发,具有高度的灵活性和可扩展性。
本文将详细介绍基于IEC61131-3标准的软PLC开发系统的设计与实现。
二、系统设计1. 系统架构设计基于IEC61131-3标准的软PLC开发系统采用模块化设计,主要包括以下几个模块:用户界面模块、编程模块、仿真模块、通信模块和执行模块。
各模块之间通过总线方式进行连接,实现数据的传输和交换。
2. 编程语言选择根据IEC61131-3标准,软PLC支持多种编程语言,包括梯形图(Ladder Diagram)、功能块图(Function Block Diagram)、结构化控制语言(SCL)等。
在开发过程中,根据实际需求选择合适的编程语言,以提高系统的开发效率和可靠性。
三、主要功能模块设计与实现1. 用户界面模块用户界面模块是软PLC系统与用户进行交互的窗口,主要包括登录界面、主界面、编程界面和监控界面等。
该模块采用图形化界面设计,提供友好的操作界面,方便用户进行编程和监控。
2. 编程模块编程模块是软PLC系统的核心模块,负责根据用户编写的程序进行逻辑运算和控制。
该模块采用IEC61131-3标准的编程语言进行编程,支持多种编程方式,如离线编程、在线编程等。
在编程过程中,系统提供丰富的函数库和工具库,方便用户进行编程和调试。
3. 仿真模块仿真模块用于对用户编写的程序进行仿真测试,以便在真实环境运行前验证程序的正确性。
该模块采用虚拟硬件环境进行仿真测试,可以模拟实际工业环境的各种情况,如传感器信号、执行器信号等。
通过仿真测试,可以减少实际运行中的错误和故障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用IEC61131-3和PLCopen的运动控制功能块来创建独立于硬件的可再用运动控制应用程序摘要运动集成及自动化解决方案的可维护性和连通性这些问题已经出现,因此需要建立标准。
PLCopen建立了这样的标准。
编程语言的标准是来协调各工作平台间运动控制功能性的访问。
这样,生成的应用程序在工作平台间更独立于硬件而且可再度利用。
PLCopen运动控制功能块提供的标准以IEC61131-3功能块概念为基础。
随着功能性和接口的标准化及在多个平台上执行,建立了编程标准,并在工业领域被广泛支持。
由于封装隐藏了数据,此标准可用于不同结构,适用的控制从集中型到分散型或从集成型到网络型。
它不是为某个应用程序特别设计的,而是可以作为在不同领域中正进行定义的基础层。
正因为如此,它对现有和将来的技术都是开放的。
介绍在很多情形中运动控制系统的用户支持多个应用层。
例如,一个包装机供应商可支持三个不同层次:低成本、中等层次和高性能/高成本。
使用不同的运动控制系统可解决速度和精确度的不同需求。
不幸的是,运动控制市场显示各种系统/解决方案的不兼容。
实际上,这意味着结构和用于开发、安装和维护的软件工具的各个层次存在很大的差异。
这种不兼容性带来了相当大的费用:使用不同的实现设备发生混乱,工程变得困难,培训费用增加,软件在各平台间不能再次使用。
标准化自然减少了以上提到的消极要素。
标准化不仅适用于IEC61131-3国际标准这样的编程语言中,而且适用于不同的运动控制解决方案(如分散型、集成型或集中型)的接口。
这种标准化可有效地用于定义可再用部件的资料库。
这样,编程更独立于硬件,应用软件的可再用性增加,培训和维护的费用减少,不同控制解决方案间的应用程序可伸缩。
任务工作小组的目标机器制造业的主要供应商请求PLCopen帮助解决不兼容的问题,因此组建了运动控制的任务工作小组。
通过使运动控制的功能块标准化,此任务工作小组定义了程序员接口。
不仅用户包括在其中,还得到供应商的广泛支持,为很多产品和结构提供了大量实现设备,因而保证了此资料库的成功。
独立的协会PLCopen于2001年11月在它的网站上发布了功能块资料库的定义。
组织成员还将继续进行修改。
该定义包括顺应性规则,将来会由PLCopen进行认证。
标准化主要关注不同供应商提供的不同系统之间的可再用性,包括分布型和网络型系统。
总之,预计标准化将覆盖运动控制市场的百分之八十左右。
任务工作小组定义了运动控制功能块概念有以下几个目标:1.简单性—容易编写应用程序、安装和维护2.效率性—体现在功能块的数量和设计效率上3.一致性—符合IEC61131-3标准4.通用性—独立于硬件5.灵活性—将来的扩展/应用范围6.完全性—不是强制性的但很充分定义包括三个部分:1.状态机的定义2.用于单轴/多轴运动控制的基本功能块集的定义3.顺应性规则和综述状态机的定义下图标准地定义了多个运动控制FB同时启动时轴在高层次的行为特性。
运动的这种组合对建立更复杂轮廓或处理程序中的一些例外很有用。
(在实际实现过程中,可能有在较低层的附加状态。
)基本规则是按顺序发出运动命令,即使PLC具有实时并行处理的能力。
这些命令作用于轴状态图上。
轴总是在定义的状态中的一种状态下。
任何运动命令都是一种转换,它改变轴的状态,因此改变当前计算出的运动。
定义了七种状态1.保持静止2.回原位3.离散运动4.持续运动5.同步运动6.停止7.故障停止正常过程都从静止开始。
在此状态下,每个轴都可连通电源(通过供电命令)。
而且可以访问回原位状态(通过对每个轴发布回原位命令),正常完成后返回静止状态。
从这里可以将轴转成离散运动或持续运动。
通过停止状态可以返回到静止。
发生故障时轴将转换为故障停止状态。
通过重启命令(人工操作)可以返回到静止,接下来机器可以再次进入运行状态。
请注意这些状态都定义了功能块的功能性。
功能块集的定义功能块的粒度是基本问题。
对应于低层次命令的功能性而言,每个轴至少有一个功能块。
一个中间层更好地实现了以上的要求,减轻处理器的负载并创建了更高水准的可伸缩性。
运行就是在此层次的基础上进行。
而且,为了将来的扩展定义两个功能块输入和输出集:一个必须遵守的基本集和一个扩展集。
轴的数据类型及实例导出数据类型AXIS_REF提供轴的索引。
所有制造商都提供这种数据类型。
它还为电机/驱动器提供接口。
实接口的技术性隐藏在结构和功能块中。
这样,当用户访问所有相关参数时,不同的结构看起来是一样的。
这种结构包括集成于控制器的运动、集成于驱动器的控制、分布型和网络型系统。
AxisRef作为Var_In_OutAxis_Ref作为Var_In_Out使用,表示在功能块图形中的水平线连接的一个输入和一个输出。
输入/输出变量值存储于FB的外部。
Axis_Ref使用的变量表现为输入和输出参数,可以在功能块内修改,以及从外部变量接收数值举例说明如何进行这个操作:设想一个程序包括很多功能块,所有的功能块都彼此相连(从左至右),都通过Axis_Ref参照到同一个轴。
此程序是在一个循环任务模式中,比如每一个毫秒。
第一个FB读取Axis_Ref中的最新值,并在完成执行前可能更新其中一些值。
紧接着下一个FB开始运行,读取Axis_Ref中已更新的值,也就是使用最新值。
这些值耦合到电机。
系统间的控制结构完全不同。
可以使用此索引定义一个或更多虚拟轴,在这个意义上,它作为数据结构出现,没有耦合到物理的驱动器或电机。
MC_MoveAbsolute在一个指定的绝对位置命令被控运动。
MC_MoveRelative在执行时,命令指定距离的被控运动,此距离与实际位置有关。
MC_MoveAdditive除了在离散运动状态下原始命令的位置,命令一个指定相关距离的被控运动。
如果FB在持续模式下启动,在执行时指定的相关距离被加入到实际位置。
MC_MoveSuperimposed除了已有的运动,命令指定相关距离的被控运动。
已有的运动不被中断,而是叠加运动。
MC_MoveVelocity命令在特殊速率下的不停止的被控运动。
MC_Home命令轴执行“回原位搜索”顺序。
此顺序的细节由制造商决定,并由轴的参数设置。
当检测到参照信号时,位置输入用于设置绝对位置。
在静止时完成此操作。
MC_Stop命令被控运动停止,将轴转换为“停止”状态。
它会中止任何进行中的功能块的执行。
使用“Done”输出,可转换为静止状态。
当轴处于“停止”状态时,其他的FB不可以在这个轴上执行任何运动。
MC_Power控制电源(开或关)。
MC_ReadStatus返回到相应于当前正在进行运动的轴的详细状况。
MC_ReadAxisError显示与功能块无关的故障。
MC_Reset通过复位所有内部与轴有关的故障和清除悬挂的命令,实现从故障停止状态到静止状态的转换。
它不作用于FB实例的输出。
MC_ReadParameter& MC_ReadBoolParameter返回到供应商的专用参数值。
如果有必要的话,返回值必需转换为实数。
若不能的话,供应商需提供一个由其规定的独立的FB。
MC_WriteParameter& MC_WriteBoolParameter修改供应商专用的参数值。
MC_ReadActualPosition返回到实际位置。
MC_PositionProfile命令一个时钟位置以锁定运动的轮廓图。
MC_VelocityProfile命令一个时间速率以锁定运动的轮廓图。
MC_AccelerationProfile命令一个时间加速度以锁定运动的轮廓图。
多轴功能块的通用设备针对多轴协同运动定义了一个小型的功能块集。
附加的应用特定的资料库扩展了该功能块集。
目前已定义的功能块有:CamTableSelect通过在相关表格上设置指针来选择CAM(凸轮)表格。
Camln啮合CAM。
CamOut立即脱离对主轴的啮合。
GearIn命令从轴和主轴间的速度比。
GearOut从轴脱离对主轴的从属。
连续功能图使用顺序功能图(SFC)实现顺序步的技术要求是较传统的方法。
SFC再配置了时序图。
包括以下几个步骤:第一步:启动,例如打开电源第二步:向钻孔位置移动,钻头开始旋转。
这样在到达指定位置前就能完全进入运行状态,然后检验是否完成这两项操作。
第三步:钻孔第四步:钻孔结束后,需等待一系列的连续操作以清除孔中的填充物。
第五步:钻头返回起始位置,关闭主轴。
完成返回移动和停止主轴两者,这时我们可以重新启动一系列步骤。
认证顺应性规则和认证也包括在文件中。
基本上是自认证,根据每个供应商发布在PLCopen网站上的结果。
被认证的公司允许使用下面的图标,并附上编号、日期和所支持的顺从性功能块的数量。
任务工作小组目前的结果此文件于2001年11月发布。
它包括以上提到的所有要素。
而且,第一批实现设备已完成,提升了此标准的质量。
对实时行为进行了调查,映象到IEC61131-3环境。
由于它多任务的性质而且时间同步,实现时对目标硬件提出了附加要求。
随着覆盖了大量运动应用系统,我们意识到第一版本不会是最后的版本。
特殊应用领域的资料库将在此基本规则的基础上建立。
首先是包装应用系统,例如直线和循环插补以及与多轴设备的混合。
结论第一版本的定稿和第一批的实现都清楚地表明出多轴的实现设备适合有IEC61131-3标准定义的架构。
这就是说虽然预计该标准的一些实现不是很适合复杂的任务,但标准本身不会约束运动控制功能块集。
功能块集的首次执行已经完成。
从此,运动控制将不再以相同面貌出现:更多的独立于硬件使用户的培训费用减少,更容易创建完成不同目标的应用软件,这种软件可以在机器开发全过程中的后期被选用。
这将带来更高的效率,而且在开发、维护和培训期间减少费用。