东大20秋学期《控制系统Simulink仿真》在线平时作业1
东大20秋学期《网络安全技术》在线平时作业1
(单选题)1: 用于实现身份鉴别的安全机制是( )。
A: 加密机制和数字签名机制
B: 加密机制和访问控制机制
C: 数字签名机制和路由控制机制
D: 访问控制机制和路由控制机制
正确答案: A
(单选题)2: 简单邮件发送协议SMTP处于TCP/IP协议分层结构的哪一层?
A: 数据链路层
B: 网络层
C: 传输层
D: 应用层
正确答案: D
(单选题)3: 机密性是指保证信息与信息系统不被非授权者所获取与使用,主要防范措施是()。
A: 防火墙
B: 访问控制
C: 入侵检测
D: 密码技术
正确答案: D
(单选题)4: 一般而言,Internet防火墙建立在一个网络的()。
A: 内部子网之间传送信息的中枢
B: 每个子网的内部
C: 内部网络与外部网络的交叉点
D: 部分内部网络与外部网络的接合处
正确答案: C
(单选题)5: ESP协议中必须实现的加密算法是()。
A: 仅DES-CBC
B: 仅NULL
C: DES-CBC和NULL
D: 3DES-CBC
正确答案: C
(单选题)6: ISO 7498 -2从体系结构的观点描述了5种普遍性的安全机制,这5种安全机制不包括( )。
A: 可信功能
B: 安全标号
C: 事件检测
D: 数据完整性机制
正确答案: D
(单选题)7: IKE协商的第一阶段可以采用()。
[东北大学]20秋学期《常用电器控制技术(含PLC)Ⅰ》在线平时作业1-学习资料
![[东北大学]20秋学期《常用电器控制技术(含PLC)Ⅰ》在线平时作业1-学习资料](https://img.taocdn.com/s3/m/9533f3a7763231126fdb11a8.png)
[东北大学]20秋学期《常用电器控制技术(含PLC)Ⅰ》在线平时作业1
提示:本科目只有一套试卷,请认真比对题目,确定是不是您需要的科目!!!
一、判断题 (共 15 道试题,共 60 分)
1.置位指令是给指定位地址的“位”置1,并结束一个逻辑串。
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:正确
2.异步电动机的气隙不是均匀的。
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:错误
3.返回系统等于1时,继电器动作状态不能确定,无法工作。
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:正确
4.隔离开关是一般有灭弧装置。
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:错误
5.电磁离合器制动属于电气制动。
()提示:请认真阅读以上题目,并作出选择
【本题正确选择】:错误
6.跌落式高压熔断器主要用于架空配电线路的支线、用户进口处,用作过载或短路保护. 提示:请认真阅读以上题目,并作出选择
【本题正确选择】:正确
7.HH系列铁壳开关外壳应可靠接地。
()
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:正确
8.电力拖动系统中的过载保护和短路保护仅仅是电流倍数的不同。
()提示:请认真阅读以上题目,并作出选择
【本题正确选择】:错误
9.低压电器是指直流额定电压1200V以下。
提示:请认真阅读以上题目,并作出选择
【本题正确选择】:错误
10.互连图是表示电路单元之间的连接情况,通常不包括单元内部的连接关系。
()提示:请认真阅读以上题目,并作出选择
【本题正确选择】:正确。
20秋学期《控制系统 Simulink 仿真》在线平时作业2
20秋学期《控制系统Simulink仿真》在线平时作业2仿真运行阶段不包括以下哪项工作?A:计算输出。
B:更新离散状态。
C:计算连续状态。
D:检查信号的宽度与连接。
答案:Dmatlab中B=1:3表示()A:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' B:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' C:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' D:答案:D下列哪项操作可以对系统模型框图进行注释A:双击系统模型编辑器的背景B:双击Simlink模块C:双击信号线D:Crtl+D答案:A求的根()A:roots()B:p=[113];roots(p)C:,roots(p)D:conv()答案:B下列哪条命令可以改变Simlink模块颜色A:RotateBlockB:ShowDropShadowC:FlipBlockD:Foregroundcolor答案:D为返回线性化后系统的传递函数描述。
应使用下列哪一种命令?A:[A,B,C,D]=linmod(’sys’,x,u);B:[num,den]=linmod(’sys’,x,u);C:[Ad,Bd,Cd,Dd]=dlinmod(’sys’,Ts,x,u);D:[numd,dend]=dlinmod(’sys’,Ts,x,u);答案:D矩阵,在matlab环境中表示为()A:A=[2,1,6,3]B:BA=[2,1,6,3]C:A=[2;1;6;3]D:A=[63;12]答案:DScope模块中可以设置几个坐标系数目A:1B:2C:3D:无限制答案:D连续系统一般用什么方式描述()A:微分方程B:差分方程C:代数方程D:逻辑描述答案:A使用命令行delete_block(’blk’),其功能描述为。
东北大学22春《控制系统 Simulink 仿真》在线平时作业1
《控制系统Simulink 仿真》在线平时作业1试卷总分:100 得分:100一、单选题(共10 道试题,共50 分)1.使用下列哪种命令,以获取除仿真时间之外的所有仿真参数选项?A.sim(’model1’)B.simsetC.simget(’model1’)D.simulink答案:C2.Input模块的作用A.设置系统输入信号B.设置系统输出信号C.为系统提供一个固定常量D.设置系统的仿真状态答案:A3.下图所示的子系统属于:{图}A.使能子系统B.触发子系统C.函数调用子系统D.通用子系统答案:A4.下列哪项操作可以对系统模型框图进行注释A.双击系统模型编辑器的背景B.双击Simlink模块C.双击信号线D.Crtl+ D答案:A5.下图所示的子系统属于:{图}A.使能子系统B.触发子系统C.函数调用子系统D.通用子系统答案:C6.在指定的系统状态x与系统输入u下对系统sys进行线性化处理,x与u的缺省值为0。
应使用下列哪一种命令?A.[A,B,C,D]=linmod(’sys’,x,u);B.[num,den]=linmod(’sys’,x,u);C.[Ad,Bd,Cd,Dd]=dlinmod(’sys’,Ts,x,u);D.[numd,dend]=dlinmod(’sys’,Ts,x,u);答案:A7.求{图}的根()A.roots({图})B.p=[1 1 3]; roots(p)C.{图}, roots(p)D.conv({图})答案:B8.使用命令行gcb(’sys’),其功能描述为A.返回当前系统模型中当前模块的路径名。
奥鹏满分作业 东北大学《控制系统Simulink仿真》在线平时作业1
《控制系统Simulink仿真》在线平时作业1封装子系统不具有下列哪种优点?A:向子系统模块中传递参数,屏蔽用户不需要看到的细节。
B:子系统模块中不需要过多展现的内容。
C:可以提高Simulink对系统仿真速度。
D:保护子系统模块中的内容,防止模块实现被随意篡改。
答案:C使用下列哪种命令,以获取除仿真时间之外的所有仿真参数选项?A:sim()B:simsetC:simget()D:simulink答案:C下列对仿真步长的理解正确的是A:仿真起始时间B:仿真结束时间C:仿真时间段D:两次采样时间的时间差答案:D虚子系统不具有下列哪种特点?A:子系统只是系统模型中某些模块组的图形表示。
B:子系统中的模块在子系统中被排序执行。
C:子系统中的模块在执行时与其上一级模块统一被排序,不受子系统的限制。
D:在一个仿真时间步长内,Simulink可以多次进出一个子系统。
答案:B矩阵,在matlab环境中表示为()A:A=[2,1,6,3]B:BA=[2,1,6,3]C:A=[2;1;6;3]D:A=[63;12]答案:D过零信号不包括以下哪种类型?A:低电平B:上升沿C:下降沿D:双边沿答案:A用以描述系统系统状态变化过程的数学模型称为()。
A:动态模型B:静态模型C:物理模型D:实体模型答案:Amatlab中,如果A=[54;73],那么在matlab中A=()A:[54;73]B:[57;43]C:[35;47]D:[52;47]答案:B。
20秋东北大学《计算机控制系统》在线平时作业1【满分答案】
1.当∆取百分之2时,一阶系统的单位阶跃响应需要过渡过程时间等于()。
A.TB.2TC.3TD.4T答案:D2.当二阶系统的时间响应的阻尼比为0时,是()系统。
A.欠阻尼B.无阻尼C.临界阻尼D.过阻尼答案:B3.单位阶跃输入下输出响应,经过()周期就稳定在设定值上。
A.TB.2TC.3TD.4T答案:B4.当∆取百分之2时,一阶系统的单位阶跃响应需要过渡过程时间等于()。
A.TB.2TC.3TD.4T答案:D5.计算机控制系统中通过()将数字信号转化模拟信号。
A.控制器B.A/D转换器C.D/A转换器D.保持器答案:C6.多路转换开关将处理后的信号按顺序按顺序切换到放大器的输出端。
()A.正确B.错误答案:B7.一阶系统的单位阶跃响应的过渡过程时间需要3T。
()A.正确B.错误答案:B8.输入输出通道是计算机控制系统的核心。
()A.正确B.错误答案:B9.低通滤波器能抑制电网侵入的外部低频干扰。
()A.正确B.错误答案:B10.计算机控制系统与连续控制系统区别就在利用计算机取代控制器进行控制及增加转换器。
()A.正确B.错误答案:A11.计算机控制系统的灵活性是指根据不同需要,编写不同程序实现不同功能。
()A.正确B.错误答案:A12.二阶系统的单位脉冲响应振幅随着时间的增大而增大。
()A.正确B.错误答案:B13.二阶系统的单位脉冲响应是一减幅正弦振荡函数,其稳态值为1。
()A.正确B.错误答案:A14.间接程序设计是最容易实现的方法。
()A.正确B.错误答案:B15.一个传递函数可以可以用一个输入对多个输出的关系。
()A.正确B.错误答案:B16.输入输出通道是计算机控制系统的核心。
()A.正确B.错误答案:B17.采样频率需要小于2倍最高频率。
()A.正确B.错误答案:B18.为了得到较高的测试精度,希望脉冲信号的宽度h比系统的时间常数T足够小。
()A.正确B.错误答案:A19.计算机控制系统从时间可以分为模拟信号和离散信号。
MATLAB语言:Simulink系统仿真习题与答案

一、单选题1、将模块连接好之后,如果要分出一根连线,操作方法是()。
A.把鼠标指针移到分支点的位置,按住鼠标左键拖曳到目标模块的输入端B.双击分支点的位置,按住鼠标左键拖曳到目标模块的输入端C.把鼠标指针移到分支点的位置,按下Ctrl键并按住鼠标拖曳到目标模块的输入端D.把鼠标指针移到分支点的位置,按下Shift键并按住鼠标拖曳到目标模块的输入端正确答案:C2、在一个模型窗口上按住一个模块并同时按Shift键移动到另一个模型窗口,则()。
A.在两个模型窗口都有这个模块B.在后一个窗口有这个模块C.在前一个窗口有这个模块D.在两个窗口都有模块并添加连线正确答案:A3、为子系统定制参数设置对话框和图标,使子系统本身有一个独立的操作界面,这种操作称为子系统的()。
A.包装B.封装C.集成D.组合正确答案:B4、使用S函数时,要在模型编辑窗口添加()。
A.Sine Wave模块B.S-Program模块C.Subsystem模块D.S-Function模块正确答案:D二、多选题1、启动Simulink的方法有()。
A.在命令行窗口中输入simulink命令B.在“主页”选项卡中单击SIMULINK命令组中的“Simulink”命令按钮C.在“主页”选项卡中单击“文件”命令组中的“新建”命令按钮D.在“主页”选项卡中单击“文件”命令组中的“新建脚本”命令按钮正确答案:A、B、C2、根据控制信号的控制方式不同,条件执行子系统分为()。
A.事件驱动子系统B.使能子系统C.触发子系统D.使能加触发子系统正确答案:B、C、D3、以下关于S函数的描述中,正确的有()。
A.利用S函数可以对Simulink模块库进行扩充B.S函数只能用MATLAB语言编写C.S函数有现成的模板程序D.S函数模块能够被封装正确答案:A、C、D三、判断题1、建立系统仿真模型是在Simulink模型编辑窗口中进行的。
正确答案:√2、利用触发子系统能够将锯齿波转换为方波。
东大20秋学期《中国近代史纲要》在线平时作业1【标准答案】
20秋学期《中国近代史纲要》在线平时作业1
试卷总分:100 得分:100
一、单选题 (共 15 道试题,共 75 分)
1.近代中国诞生的新兴的被压迫阶级是()
A.失业的农民
B.手工业者
C.城市贫民
D.工人阶级
答案:D
2.共产党早期组织领导的第一个工会是()
A.上海机器工会
B.长辛店工人俱乐部
C.武汉工会
D.长沙工会
答案:A
3.邓小平提出“把马克思主义的普遍真理同我国的具体实际结合起来,走自己的道路,建设有中国特色的社会主义”是在(
)
A.中共十一届三中全会
B.中共十一届六中全会
C..中共十二大
D.中共十二届四中全会
答案:C
4.近代中国之所以沦为半殖民地半封建社会,其根本原因在于()
A.封建地主阶级的腐败
B.农民的愚昧
C.资本--帝国主义的入侵
D.民族资产阶级的软弱
答案:C
5.成为建设共产党领导的新型人民军队的重要开端是( )
A.南昌起义
B.八七会议
C.秋收起义
D.三湾改编
答案:D
6.农村包围城市、武装夺取政权理论的提出,标志着()
A.中国化的马克思主义即毛泽东思想的初步萌芽
B.中国化的马克思主义即毛泽东思想的初步形成
C.中国化的马克思主义即毛泽东思想的初步成熟。
东大20春学期《控制系统 Simulink 仿真》在线平时作业1
东大20春学期《控制系统Simulink 仿真》在线平时作业1
试卷总分:100 得分:100
一、单选题(共10 道试题,共50 分)
1.混合系统中一般采用那种求解器
A.离散步长求解器
B.混合步长求解器
C.定步长求解器
D.变步长求解器
答案:D
2.在MATLAB Fun模块中所调用的函数所拥有的输出个数有几个
A.4
B.3
C.2
D.1
答案:D
3.定步长连续求解器有几种方法
A.8
B.7
C.6
D.5
答案:D
4.下列哪条命令可以旋转Simlink模块
A.Show Drop Shadow
B.Rotate Block
C.Foreground color
D.Flip Block
答案:D
5.原子子系统不具有下列哪种特点?
A.子系统作为一个整体进行仿真,其功能类似于一个单独的系统模块。
B.子系统为一“实际”的模块,需要按照顺序连续执行。
C.子系统中的模块在子系统中被排序执行。
D.在一个仿真时间步长内,Simulink可以多次进出一个子系统。
答案:D
6.使用命令行gcb(’sys’),其功能描述为
A.返回指定系统模型中当前模块的路径名。
B.返回当前系统模型中当前模块的路径名。
C.返回当前系统模型中当前模块的操作句柄。
D.获得当前系统模型的路径名。
答案:A。
东大20秋学期《控制系统 Simulink 仿真》在线平时作业1
20秋学期《控制系统Simulink仿真》在线平时作业1
下列对仿真步长的理解正确的是
A:仿真起始时间
B:仿真结束时间
C:仿真时间段
D:两次采样时间的时间差
答案:D
A:3
B:13
C:40
D:0.625
答案:C
使用命令行open_system(‘blk’),其功能描述为A:建立一个新的Simulink系统模型。
B:打开一个已存在的Simulink系统模型。
C:保存一个Simulink系统模型。
D:关闭一个Simulink系统模型。
答案:B
为设置系统模型或其中模块的回调函数。
应使用下列哪一种命令?
A:simset
B:set_param
C:simget
D:get_param
答案:B
对系统中个模块参数及仿真参数正确设置完毕后,有几种方式开
始系统的仿真工作
A:1
B:2
C:3
D:4
答案:C
离散系统一般用什么方式描述()。
A:微分方程。
Simulink实验作业及答案
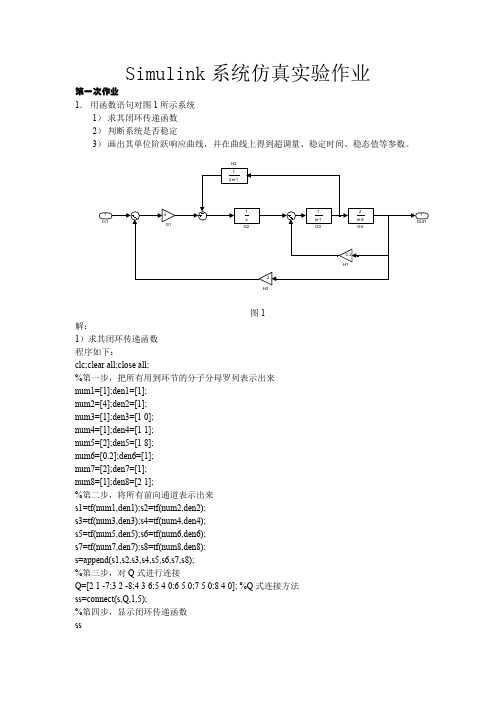
Simulink系统仿真实验作业第一次作业1.用函数语句对图1所示系统1)求其闭环传递函数2)判断系统是否稳定3)画出其单位阶跃响应曲线,并在曲线上得到超调量、稳定时间、稳态值等参数。
图1解:1)求其闭环传递函数程序如下:clc;clear all;close all;%第一步,把所有用到环节的分子分母罗列表示出来num1=[1];den1=[1];num2=[4];den2=[1];num3=[1];den3=[1 0];num4=[1];den4=[1 1];num5=[2];den5=[1 8];num6=[0.2];den6=[1];num7=[2];den7=[1];num8=[1];den8=[2 1];%第二步,将所有前向通道表示出来s1=tf(num1,den1);s2=tf(num2,den2);s3=tf(num3,den3);s4=tf(num4,den4);s5=tf(num5,den5);s6=tf(num6,den6);s7=tf(num7,den7);s8=tf(num8,den8);s=append(s1,s2,s3,s4,s5,s6,s7,s8);%第三步,对Q式进行连接Q=[2 1 -7;3 2 -8;4 3 6;5 4 0;6 5 0;7 5 0;8 4 0]; %Q式连接方法ss=connect(s,Q,1,5);%第四步,显示闭环传递函数ss运行结果:Transfer function:8 s + 4--------------------------------------s^4 + 9.5 s^3 + 12.1 s^2 + 20.3 s + 122)判断系统是否稳定程序如下:clear all;clcnum=[1 1 2 2 3 5];den=1;%第一步,求系统特征方程s=tf(num,den);%第二步,求系统特征方程的根si=roots(num);%第三步,求出特征根矩阵的大小[m n]=size(roots(num));%第四步,求特征根虚部gen=imag(si)l=0;%第五步,判断是否有虚部大于0;否则g=0for i=1:m*nif(gen(i)>0)l=l+1;endendif(l>0)disp('系统不稳定')end运行结果:gen =1.1656-1.16561.3375-1.3375系统不稳定3)画出其单位阶跃响应曲线,并在曲线上得到超调量、稳定时间、稳态值等参数。
东大14秋学期《控制系统 Simulink 仿真》在线作业1答案
14秋学期《控制系统Simulink 仿真》在线作业1
一,单选题
1. 使用命令行set_param(’obj’,’parameter’),其功能描述为
A. 设置系统模型以及模块参数。
B. 添加系统模型以及模块参数。
C. 获取系统模型以及模块参数。
D. 删除系统模型以及模块参数。
?
正确答案:A
2. 下列哪条命令可以反转Simlink模块
A.
Rotate Block
B.
Show Drop Shadow
C.
Flip Block
D.
Foreground color
?
正确答案:A
3. 使用命令simplot(tout2,yout2); 其中yout2是指
A. 动态系统仿真结果的输出数据。
B. 动态系统仿真时间向量。
C. 动态系统仿真的状态变量矩阵。
D. 动态系统仿真结果的输出时间向量。
?
正确答案:A
4. 静态模型仅仅反映系统在平衡状态下系统特征值间的关系,这种关系常用()来描述
A.
微分方程
B.
代数方程
C.
差分方程
D.
线性方程
?
正确答案:B。
东大21春学期《控制系统 Simulink 仿真》在线平时作业3【标准答案】
21春学期《控制系统 Simulink 仿真》在线平时作业3
试卷总分:100 得分:100
一、单选题 (共 10 道试题,共 50 分)
1.一般而言,对于离散系统使用那种求解器效率最好
A.定步长求解器
B.混合步长求解器
C.离散步长求解器
D.变步长求解器
答案:D
2.使用命令行simulink,其功能描述为
A.开始仿真。
B.新建一个空的系统模型。
C.返回MATLAB主界面。
D.打开Simulink的模块库浏览器。
答案:D
3.条件执行子系统不包括:
A.使能子系统
B.触发子系统
C.函数调用子系统
D.通用子系统
答案:D
4.使用命令[t,x,y1,y2,…,yn]=sim(model,timespan,options,ut); 其中y1,y2,…,yn返回的是什么?
A.系统仿真时间向量。
B.系统仿真状态变量矩阵。
C.系统仿真的输出矩阵。
D.多个系统仿真的输出。
答案:D
5.仿真运行阶段不包括以下哪项工作?
A.计算输出。
B.更新离散状态。
C.计算连续状态。
D.检查信号的宽度与连接。
答案:D
6.矩阵{图},在matlab环境中表示为()
A.A=[2, 1, 6, 3]
B.B A=[2, 1, 6, 3]
C.A=[2; 1; 6; 3]
D.A=[6 3; 1 2]。
东北大学智慧树知到“电气工程及其自动化”《控制系统 Simulink 仿真》网课测试题答案1

东北大学智慧树知到“电气工程及其自动化”《控制系统Simulink 仿真》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共15题)1.与图形建模方式操作控制相比,命令行方式仿真不具有以下哪种优点()A.自动地重复运行仿真。
进行快速仿真B.在仿真过程中动态调整参数C.友好的使用界面D.分析不同输入信号下的系统响应2.离散系统常用差分方程描述。
()A.正确B.错误3.过零信号不包括以下哪种类型?()A.双边沿B.低电平C.下降沿D.上升沿4.Scope模块与实验室内哪种工具类似?()A.计算机显示器B.示波器C.计算器D.打印机5.使用命令[t,x,y1,y2,...,yn]=sim(model,timespan,options,ut);其中除了哪一项参数外,其它参数设置均可以取值为空矩阵?()A.modelB.timespanC.optionsD.ut 6.矩阵,在matlab环境中表示为()。
A.A=[2,1,6,3]B.B A=[2,1,6,3]C.A=[2;1;6;3]D.A=[6 3;1 2]7.使用下列哪种命令,可以将系统仿真参数中的过零检测关闭?()A.myoptions=simset(‘AbsTol’,‘2e-5’)B.myoptions=simset(‘ZeroCross’,‘off’)C.myoptions=simset(‘MaxStep’,‘1/500’)D.myoptions=simset(‘Solver’,‘ode45’)8.使用命令行gcbh,其功能描述为()A.返回指定系统模型中当前模块的路径名B.返回当前系统模型中当前模块的路径名C.返回当前系统模型中当前模块的操作句柄D.获得当前系统模型的路径名9.一个混合系统中包括连续状态与离散状态,而且离散信号的采样时间各不相同。
在系统仿真时应该使用何种Simulink求解器?()A.连续定步长求解器B.连续变步长求解器C.离散定步长求解器D.离散变步长求解器10.如果用户需要插入一个单输入单输出模块,只需将这个模块移动到线上即可实现自动连接。
东北大学智慧树知到“电气工程及其自动化”《控制系统 Simulink 仿真》网课测试题答案5

东北大学智慧树知到“电气工程及其自动化”《控制系统Simulink 仿真》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共15题)1.反应系统在平衡状态下的特征的模型称为静态模型。
()A.正确B.错误2.使用命令行save_system(‘vdp’),其功能描述为()。
A.建立一个新的Simulink系统模型B.打开一个已存在的Simulink系统模型C.保存一个Simulink系统模型D.关闭一个Simulink系统模型3.使用命令[sizes,x0,xord]=modelname; 可以获得系统模型中状态输出的顺序。
()A.正确B.错误4.matlab中字符串的定义为()A.a={microsoft}B.a=microsoftC.a=(microsoft)D.a=’microsoft’5.Simulink对连续系统进行求解仿真时,可以得到精确解。
()A.正确B.错误6.一个结构体系完整的S-函数包含了描述动态系统所需的全部能力。
()A.正确B.错误7.仿真运行阶段不包括以下哪项工作?() A.计算输出B.更新离散状态C.计算连续状态D.检查信号的宽度与连接8.matlab中字符串的定义为()。
A.a=microsoftB.a=‘microsoft’C.a=(microsoft)D.a={microsoft}9.使用Crtl+Enter组合可以使系统模型充满整个视图窗口。
()A.错误B.正确10.从某种意义上来讲,连续系统中的连续状态是一种“记忆元素”,它可以保存系统中的信息并用来直接计算系统的输出,而不需要设计导数。
()A.错误B.正确11.使用命令行close_system(‘sys’),其功能描述为()A.打开一个已存在的Simulink系统模型B.建立一个新的Simulink系统模型C.关闭一个Simulink系统模型D.保存一个Simulink系统模型12.微分方程的不同数值求解方法对应着不同的连续求解器。
东大20秋学期《数控机床与编程》在线平时作业1
(单选题)1: 滚珠丝杠副消除轴向间隙的目的主要是()
A: 提高反向传动精度
B: 增大驱动力矩
C: 减少摩擦力矩
D: 提高使用寿命
正确答案: A
(单选题)2: 感应同步器滑尺上的两个激磁绕组在长度方向相差()。
A: 2 个节距
B: 1/2 个节距
C: 4 个节距
D: 1/4 个节距
正确答案: D
(单选题)3: 步进电机驱动控制采用加/减速方式,有利于( )
A: 防止步进电机失步
B: 防止机床机械共振
C: 改善步进电机低频特性
D: 增大步进电机的步距角
正确答案: C
(单选题)4: 对于卧式数控车床的坐标系,一般以主轴上夹持的工件最远端面作为Z轴的基准点,则Z轴的正方向是从此基准点()。
A: 沿床身远离工件的方向
B: 沿床身靠近工件的方向
C: 垂直向上的方向
D: 垂直向下的方向
正确答案: A
(单选题)5: 数控车床与普通车床相比在结构上差别最大的部件是()
A: 主轴箱
B: 床身
C: 进给传动
D: 刀架
正确答案: C
(单选题)6: 数控车床刀架的位置布置形式有()两大类。
A: 前置式和后置式
B: 排式和转塔式
C: 筒式和管式
D: 蜗轮蜗杆式和齿轮
正确答案: A
(单选题)7: 用光栅位置传感器测量机床位移,若光栅栅距为0.01mm,莫尔条纹移动数为100。
东北大学《控制系统 simulink 仿真》期末考试真题库(含答案)48
一、选择与判断1.用以描述系统状态变化过程的数学模型称为动态模型。
2.B=2:5执行后的结果为B=[2 3 4 5]3.plot(x,y,z)是用来绘制二维图形的。
4.静态模型仅仅反映系统在平衡状态下系统特征值间的关系,这种关系常用()来描述。
A 微分方程B 代数方程C 差分方程D 线性方程\5.使用命令行save_system(‘vdp’),其功能描述为A.建立一个新的Simulink系统模型。
B.打开一个已存在的Simulink系统模型。
C.保存一个Simulink系统模型。
D.关闭一个Simulink系统模型。
6.利用Simulink对动态系统进行的仿真的核心在于,MATLAB计算引擎对系统的微分方程和差分方程的求解。
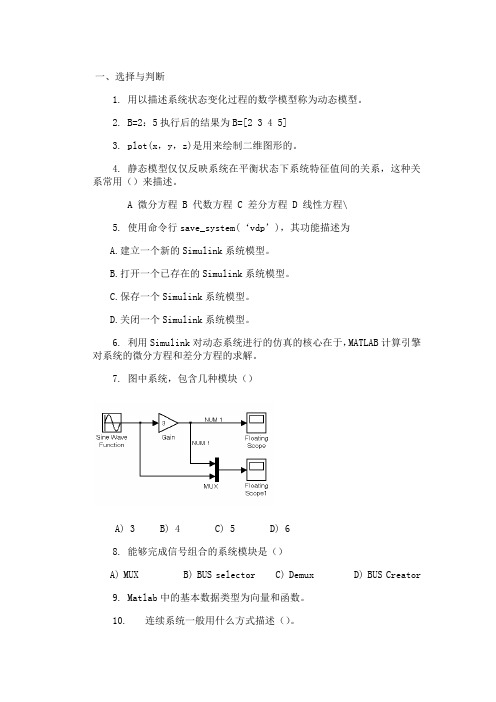
7.图中系统,包含几种模块()A) 3 B) 4 C) 5 D) 68.能够完成信号组合的系统模块是()A) MUX B) BUS selector C) Demux D) BUS Creator9.Matlab中的基本数据类型为向量和函数。
10.连续系统一般用什么方式描述()。
A 微分方程B 差分方程C 代数方程D 逻辑描述11.Simulink 中不包含专用模块库,是否正确? 12. matlab 中A=[2 4; 3 3]表示()。
A ⎥⎦⎤⎢⎣⎡=4233AB ⎥⎦⎤⎢⎣⎡=4323AC ⎥⎦⎤⎢⎣⎡=3342AD ⎥⎦⎤⎢⎣⎡=3234A 13. 积分器是建立连续系统微分方程的基础,也是建立连续系统模型的基础,一个积分器表示一阶积分,高级微分则是由多个积分器模块串联构成。
14. 以下哪些是matlab 绘图命令()。
A plot()B plot3()C subplot()D conv()15. 积分器主要用来实现哪种运算()A) 积分 B) 微分 C) 比例 D )保持16. Simlink 允许改变模块的几何尺寸和模块颜色17. 使用命令行save_system(‘vdp ’),其功能描述为( )A.建立一个新的Simulink 系统模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(单选题)1: 下列对仿真步长的理解正确的是
A: 仿真起始时间
B: 仿真结束时间
C: 仿真时间段
D: 两次采样时间的时间差
正确答案: D
(单选题)2:
A: 3
B: 13
C: 40
D: 0.625
正确答案: C
(单选题)3: 使用命令行open_system(lsquo;blkrsquo;),其功能描述为
A: 建立一个新的Simulink系统模型。
B: 打开一个已存在的Simulink系统模型。
C: 保存一个Simulink系统模型。
D: 关闭一个Simulink系统模型。
正确答案: B
(单选题)4: 为设置系统模型或其中模块的回调函数。
应使用下列哪一种命令?
A: simset
B: set_param
C: simget
D: get_param
正确答案: B
(单选题)5: 对系统中个模块参数及仿真参数正确设置完毕后,有几种方式开始系统的仿真工作
A: 1
B: 2
C: 3
D: 4
正确答案: C
(单选题)6: 离散系统一般用什么方式描述()。
A: 微分方程
B: 差分方程
C: 代数方程
D: 逻辑描述
正确答案: B
(单选题)7: 代数环的解决方案不包括:。