机械手信号连线
注塑机械手的接口标准
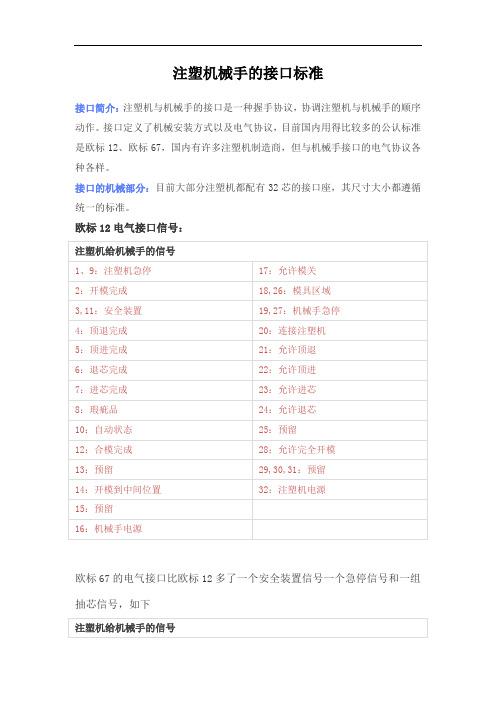
欧标67的电气接口比欧标12多了一个安全装置信号一个急停信号和一组国内许多注塑机厂商的机械手接口信号一般只有几个信号:注塑机给机械手信号:急停、安全门、开模完成、自动状态。
机械手给注塑机信号:互锁、允许顶出、取出完成。
下面针对欧标12、欧标67的信号做说明电源注塑机与机械手的信号是通过中间继电器传递的,它们的电源各自独立,这有助于提高各自的稳定性。
信号是高电平有效还是低电平有效,欧标没规定,由注塑机和机械手制造商自己定义,欧标只定义中间继电器的通断。
举个例子,如果某注塑机制造商需要定义"允许模关”为低电平有效,那么给32芯"注塑机电源”0V的电源,当机械手允许模关的时候,就闭合相应的中间继电器,就把17芯的信号拉至低电平。
同理如果需要高电平有效就把注塑机的24VDC引到第32芯上。
急停信号以及安全装置信号欧标67比欧标12分别多了一个信号,按照欧标机械手的工作区域需要围起来,以便安全,所以围栏上面需要安装一急停以及检查安全装置是否安全的电气开关。
"模具区域”信号机械手上有两个光电开关,用来监测机械手位置是否在模具区域,若在模具区域,注塑机应该被禁止合模,这个信号与其它信号有点不一样,当不在模具区域的时候,机械手控制中间继电器闭合,如果注塑机定义高电平有效,那么对应的信号线就为高电平,当机械手进入模具区域,中间继电器断开,信号线变为低电平了。
"连接注塑机”信号当需要使用机械手的时候,使能这个信号,那么注塑机就和机械手联锁动作,注塑机的开合模顶针以及抽芯动作受机械手控制,当关闭此信号,机械手和注塑机各自自由动作。
"瑕疵品”信号当注塑机检测到当前的制品不符合质量要求,发信号给机械手,如果机械手打开处理瑕疵品的功能,那机械手会作出相应的处理。
"开模到中间位置”和"允许完全开模”信号这两个信号用在这种情况下:当客户需要开模到某个设定的位置后就允许机械手取制品。
机械手安全接口的接线
MODE
MANUAL
AUTOMATIC
模式切换开关 (用户自备)
图 3-11:模式切换开关示意图 (CR751)
(1) 模式切换开关输入的规格 模式切换开关输入的功能和规格如下所示。
外部紧急停止输入输出 / 停止专用输入 / 门开关输入 / 可用设备输入 3-87
3 控制器
3.7 模式切换开关输入
连接用户自备的按键开关,通过该开关操作切换机器人的操作权。 按键开关可以安装到用户自备的操作面板上。 < 操作权 (模式)>
AUTOMATIC ...........通过外部设备进行的操作有效。无法进行需要示教单元操作权的操作。与外部设 备的连接中,需要对操作权用的参数进行设置。详细内容请参阅另一手册 “操 作说明书 / 功能和操作的详细说明”。
(1) 信号排列 这里显示的伺服放大器正面图是MR-J3-20A以下时的图,关于其他的伺服放大器的外 观和接头的配置请参照第10章 外形尺寸图。
CN5(USB接头) 参照12.6节
CN6 3
2
CN2
4
8
2
6
10
LG
1
5
9
P5 3
7 BAT
MR
MD
3M接头图,使用其他接头时, 请参照12.1.2项。
1 LG
44
20
45
21
46
22
47
23
48
24
49
25
50
3 - 21
L1
CN3(RS-422接头)
L2
机器人现场编程-川崎机器人IO信号的连接
一、I/O信号的连接-通用信号的连接
• 通用输入/输出信号(包括软件专用信号),由控制器中的 1TW 板处理。
1)外部输入信号(外部→机器人)
1TW板 CN4连接器提供32 个输入信号,有两个由外部提供的 24V 的公 共连接:CN4 的引脚 18 和引脚 19。地线与外部电源相连,输入 24V (1GW)或 0V(1HW)。每个公共分别给 CN4 中的引脚 1-16 以及引脚 20-35 连接的 16 个通道提供电源。外部输入信号与这些引脚相连。
2)不使用“外部马达电源 ON”时的连接 断开 1TR 板端子块连接器 X9 的引脚 5-6,在这两个引脚之间不连任
何电线。
3. 安全回路OFF “安全回路OFF”信号能从外部切断马达电源。当此信号断开时,马达
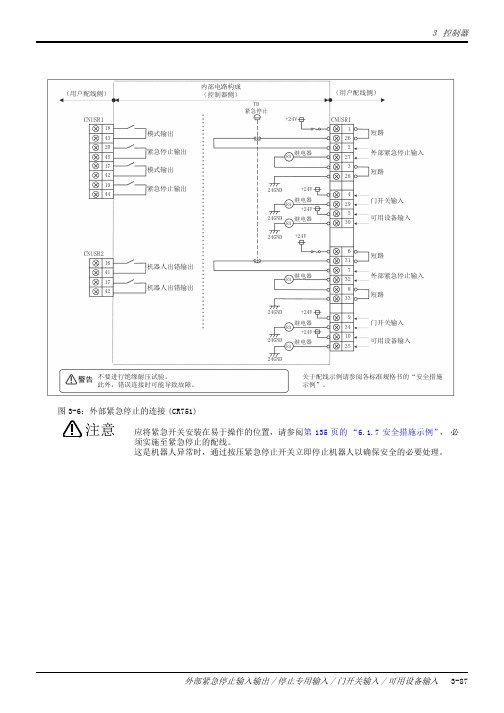
电源 OFF。可使用以下三类安全回路输入信号。 • (1)外部紧急停止(在示教和再现模式下有效) • (2)安全围栏输入(仅在再现模式下有效) • (3)外部触发开关输入(仅在示教模式下有效)
三、课程预告
• 川崎工业机器人I/O信号的应用实例
将 1TR பைடு நூலகம் X9 连接器端子块的引脚 1-2 开路,将引脚3-4短接,接线方 法如图所示。
2. 外部马达电源ON 1)使用“外部马达电源 ON”时的连接 短接 1TR 板端子块连接器 X9 的引脚 5-6,开启马达电源至 ON。在连
接器 X9 上的引脚 5和 6 之间连接一个开关或继电器触点。须使用脉冲信号, 不允许一直闭合。
(1)外部紧急停止(在示教和再现模式下有效) 1)使用“外部紧急停止”时的连接(使用 2 个安全回路,直接连接外部
开关触点) 将 1TR 板的端子块连接器 X7 的引脚 3-4 和 5-6 跳线去除,并按下
《机械手信号连线》课件
02
机械手信号连线原理
信号传输原理
01
信号传输方式
机械手信号连线主要采用有线 传输方式,通过电缆将信号从
控制器传输到机械手。
02
信号类型
常见的机械手信号包括控制信 号、反馈信号和传感器信号等 ,用于控制机械手的运动轨迹
和状态监测。
03
信号传输速率
为了保证信号的实时性和准确 性,需要选择合适的传输速率 ,以满足机械手控制的需求。
问题二
机械手信号连线出现故障,导致生产线停机。
问题三
机械手信号连线与控制系统不兼容。
解决方案
采用屏蔽电缆,优化信号传输线路,避免电磁干扰。
解决方案
定期检查机械手信号连线,及时发现并修复故障。
解决方案
选用符合控制系统要求的机械手信号连线,或对控制系 统进行升级改造。
优化建议和改进方案
建议一
采用高可靠性、耐用的机 械手信号连线,提高生产 线的稳定性和可靠性。
机械手信号连线的应用场景
在自动化生产线中,机械手信号连线用于连接机械手控 制器和执行机构,实现自动化操作。
在机器人应用中,机械手信号连线用于连接机器人的控 制器和传感器,实现机器人的感知和控制功能。
在航空航天领域,机械手信号连线用于连接机械手控制 器和执行机构,实现空间物体的抓取和释放。
机械手信号连线的重要性
03
机械手信号连线实例
实际应用案例
01
02
03
案例一
某汽车制造企业生产线上 的机械手信号连线,实现 自动化生产。
案例二
某食品加工企业生产线上 的机械手信号连线,提高 生产效率和产品质量。
案例三
某电子制造企业生产线上 的机械手信号连线,实现 高精度装配。
机械手信号连线
精选课件
19
海太
X000= 安全
门
X003= 锁模
完
X403=
机械
手连
精选课件
20
日本住友
A12/B12=关模
A13/B13=开模
A14/B14=顶针
A15/B15=循环启动
A1/B1=闭模完
A3/B3=全自动
A4/B4=开模完
A5/B5=安全门
精选课件
21
亿利达
X56=可 顶针
X57=循 环启动
X40=完 全门
Y21=锁 模
Y77=开
精选课件
22
申达
B06=关模终 B11=安全门 B22=循环启动 C1=关模 C3=开模 23A/23B=开模完
精选课件
23
日钢
15/16= 安全
门
09/10= 开模
完
05/06=
闭模
完
精选课件
24
SI Sunny 振强
Y120=开模完 26V
Y122=安全门 26V
精选课件
9
LG(1)
X007=安全门 3 X014=开模 X015=关模 X016=顶针 X017=周期 Y213=开模完 14 Y214=全自动
精选课件
10
LG(2)
X014=安全门 3
X025=闭模完 3
X030=开模
X040=关模
X042=顶针
X043=循环启动
Y107=全自动 20
Y123=开模完 20
注:20=110V
精选课=安全门 24V 069=可取出 24V 070=用机械手(不用机械手时,此接点要通) 071=取出中 072=可以顶针 073=取出完成 038=开锁模
机械手外围设备输入联机说明

远程IO板 Y9 YA YB
剪刀电磁阀
备用输出3 (吹气)
专业机械手制造商
追求卓越,致力于客户成功
2、工艺动作:机械手取完产品之后,首先要横出将水口剪掉,在安放产品,所以 配合的工艺动作如下: 由于采用的是备用输出3,其在程序中的默 认功能为吹气,所以要将输出间隔设置为0,即 每模都输出:
1、主臂下 2、主臂前 3、允许顶出 4、吸取 5、主臂后 6、主臂上 7、翻平 8、允许合模 9、横出1 10、主臂上中位
允许合模 允许顶出 再循环 备用输出4
追求卓越,致力于客户成功
机械手侧
12路继电器板V2.0
J3
(1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24)
16、主臂上中位 17、吸取 18、主臂上 19、横出2 20、主臂下 21、吸释 22、主臂上 23、横入 24、翻直 25、等待开模
此种联机需要注意的是机械手将产 品放到热熔机上之后需要上行等待, 以免与热熔机的动作发生冲突。
专业ห้องสมุดไป่ตู้械手制造商
追求卓越,致力于客户成功
谢谢!
备用输出切换条件设置界面
专业机械手制造商
追求卓越,致力于客户成功
根据实际生产中的使用情况,为了便于操作联机,机械手备用输出都进行了默认 功能设置,有此需求的时候用户无需再额外配置,直接在辅助功能中调用即可,若改 用其他功能,也只需在设置中将默认功能设置为无效,在根据实际需求联机即可。
备用输出的默认功能选择
11、备用输出3 12、备用输出3停止 13、主臂上 14、横出2 15、主臂下 16、吸释 17、主臂上 18、横入 19、翻直 20、等待开模
机械手控制电路设计

机械手控制电路设计一、引言机械手是一种常见的自动化设备,广泛应用于工业生产和物流领域。
机械手控制电路负责控制机械手的运动和动作,使其能够完成所需的任务。
本文将介绍机械手控制电路的设计原理和方法。
二、机械手控制电路的设计原理1.运动控制:机械手需要能够在三维空间内准确地移动和定位。
因此,机械手控制电路需要能够控制各个关节的运动,并实现运动的连续性和平滑性。
2.动作控制:机械手的动作通常包括抓取、放置和释放等。
机械手控制电路需要能够根据外部信号控制机械手的动作,以完成各种任务。
3.传感器接口:机械手控制电路需要与各种传感器进行连接,以获取所需的信息。
例如,光电传感器可以用于检测物体的位置和距离,力传感器可以用于检测机械手的抓取力度。
4.用户界面:机械手控制电路通常需要一个用户界面,以便操作人员对机械手进行参数设置和控制。
用户界面可以是按钮、开关、触摸屏等设备。
三、机械手控制电路的设计方法1.硬件设计硬件设计主要包括电路的选择和布局。
在选择电路时,需要考虑机械手的性能要求、供电情况和成本等因素。
例如,电机控制器可以选择PWM技术,以实现电机的精确控制。
电路的布局要合理,以保证各个电路之间的串扰最小。
2.软件设计软件设计主要包括编程和控制算法的设计。
编程可以使用常用的嵌入式编程语言,例如C、C++等。
控制算法的设计需要根据机械手的运动特点和任务要求进行调整。
例如,可以采用PID控制算法来实现机械手的位置控制。
四、机械手控制电路的实例下面是一个简单的机械手控制电路的实例。
该电路包括一个基于Arduino的控制板、几个舵机、一个开关和一个触摸屏。
控制板通过串口与触摸屏通信,接收指令后通过PWM信号驱动舵机实现机械手的运动和动作。
在软件方面,使用Arduino编程语言,编写程序来实现机械手的控制。
程序通过读取触摸屏的指令,并根据不同的指令发送对应的PWM信号来控制舵机的转动。
同时,程序还可以处理传感器信息,并根据需要进行相应的控制。
机械手信号连线
X1-13=机械手连锁 X4-24=锁模终止 24V
X24=机械手顶针 002/002A=开模
070=用机械手(不用机械手时,此接点要通) 18=机械手连线 105=开模
Y40=关模 23A/23B=开模完
Y123=开模完 20
20=顶针
123=开模完
A12/B12=关模
Y46=开模 069=可取出 24V
东华
X000= 完全门
X023= 循环启 动
Y000=锁 模
Y006=开 模
德马格
3=闭模 24V 4=顶针 24V 5=开模完 0V 8/9=安全门(如果这模完
川口
63=顶针 65=循环启动 206=开模 214=关模 258=安全门 297=闭模完 298=全自动 299=开模完
1=0V 3=24V
富强鑫双色机
40A/40B=开模完 35A/35B=安全门 34A/34B=关模完 X09=关模 X20=开模 X27=机械手使用 X46/47循环启动
X1-01=安全门 24V X3-09=开模
19=成品
108=关模
X016=顶针 SI Sunny 振强
X1-13=机械手连锁 X4-24=锁模终止 24V 069=可取出 24V
X017=周期 X11=关模完 Y08=关模
070=用机械手(不用机械手时,此接点要通) 34A/34B=关模完
18=机械手连线 105=开模
震雄(2)
00=安全门 401 21=循环启动
18=机械手连线 105=开模
19=成品
108=关模
20=顶针
123=开模完
注:19/21必须通断一次才能做全自动,18在 不用机械手时必须常通.
R1机械手互锁信号对接V1.0

Q1.0 Q1.1 Q1.2 Q1.3 Q1.4 Q1.5 Q1.6 Q1.7
I108.0 I108.1 I108.2 I108.3 I108.4 I108.5 I108.6 I108.7
Q2.0 Q2.1 Q2.2 Q2.3 Q2.4 Q2.5 Q2.6 Q2.7
I109.0 I109.1 I109.2 I109.3 I109.4 I109.5 I109.6 I109.7
OP10卧加给机械手(DP:16)
诊断信号 机床没有急停 机床安全门已关闭 机床联机自动模式 机床设备故障 机床天窗打开 机床心跳(1秒脉冲) 机床预下料请求
工位1上料请求 工位2上料请求 工位1下料请求 工位2下料请求 工位1有料 工位2有料 确认收到无料信号 备用
备用 备用 备用 备用 备用 备用 备用 备用
备用 备用 备用 备用 备用 备用 备用 备用
备用 备用 备用 备用 备用 备用 备用 备用
卧加
I106.0 I106.1 I106.2 I106.3 I106.4 I106.5 I106.6 I106.7
机械手
Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6 Q0.7
I107.0 I107.1 I107.2 I107.3 I107.4 I107.5 I107.6 I107.7
备用 备用 备用 备用 备用 备用 备用 备用
卧加
Q98.0 Q98.1 Q98.2 Q98.3 Q98.4 Q98.5 Q98.6 Q98.7
机械手
I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 I0.6 I0.7
Q99.0 Q99.1 Q99.2 Q99.3 Q99.4 Q99.5 Q99.6 Q99.7
机械手与注塑机的连接
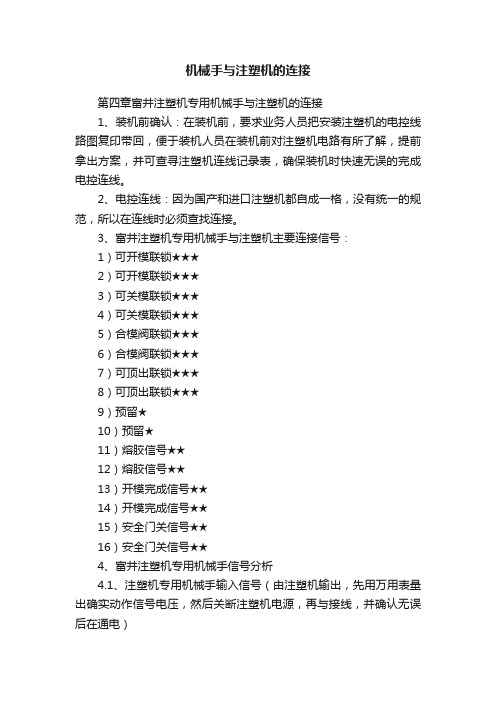
机械手与注塑机的连接第四章富井注塑机专用机械手与注塑机的连接1、装机前确认:在装机前,要求业务人员把安装注塑机的电控线路图复印带回,便于装机人员在装机前对注塑机电路有所了解,提前拿出方案,并可查寻注塑机连线记录表,确保装机时快速无误的完成电控连线。
2、电控连线:因为国产和进口注塑机都自成一格,没有统一的规范,所以在连线时必须查找连接。
3、富井注塑机专用机械手与注塑机主要连接信号:1)可开模联锁★★★2)可开模联锁★★★3)可关模联锁★★★4)可关模联锁★★★5)合模阀联锁★★★6)合模阀联锁★★★7)可顶出联锁★★★8)可顶出联锁★★★9)预留★10)预留★11)熔胶信号★★12)熔胶信号★★13)开模完成信号★★14)开模完成信号★★15)安全门关信号★★16)安全门关信号★★4、富井注塑机专用机械手信号分析4.1、注塑机专用机械手输入信号(由注塑机输出,先用万用表量出确实动作信号电压,然后关断注塑机电源,再与接线,并确认无误后在通电)4.1.1 开模完信号:此信号为注塑机开模到底时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手可下行的开启信号。
当注塑机专用机械手在手动时,如无开模完信号,又强行按下行键,手臂不下行,且手控器显示报警。
在全自动时,如开模完无切换动作,手臂不下行取物。
4.1.2 熔胶信号:此信号为注塑机熔胶时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手安全信号。
当注塑机专用机械手在全自动时,如关模完无切换动作,手臂不下行取物。
4.1.3 安全门信号:此信号为注塑机安全门关时注塑机才可输出供给之信号,为注塑机专用机械手安全配合信号和报警后启动信号。
当注塑机专用机械手在手动时,如无安全门信号,又强行按动作键,注塑机专用机械手不动作,且手控器产生报警显示。
在全自动时,如开安全门即无安全门信号时,注塑机专用机械手动作暂停,当关安全门即有安全门信号时,注塑机专用机械手继续动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
富强鑫双色机
40A/40B=开模完 35A/35B=安全门 34A/34B=关模完 X09=关模 X20=开模 X27=机械手使用 X46/47循环启动
机械手信号连线
日本东洋
0/15=开模完 3/18=安全门 4/19=关模完 4/14=关模 6/16=开模 8/18=循环启动
机械手信号连线
TMC
机械手信号连线
LG(1)
X007=安全门 3 X014=开模 X015=关模 X016=顶针 X017=周期 Y213=开模完 14 Y214=全自动
机械手信号连线
LG(2)
X014=安全门 3
X025=闭模完 3
X030=开模
X040=关模
X042=顶针
X043=循环启动
Y107=全自动 20
X57=循 环启动
X40=完 全门
Y21=锁 模
Y77=开
机械手信号连线
申达
B06=关模终 B11=安全门 B22=循环启动 C1=关模 C3=开模 23A/23B=开模完
机械手信号连线
日钢
15/16= 安全 门
09/10= 开模 完
05/06= 闭模 完
机械手信号连线
SI Sunny 振强
Y120=开模完 26V Y122=安全门 26V Y123=全自动 X216=关模锁住 X217=开模锁住 X218=托模锁住 X219=完成信号 注:X216/217反相(有开模完此接点要通) X219正相(有开模完机械此手信接号连线点要断)
机械手信号连线
台意德
X00=安全门 X03=锁模完 X23=机械手合模 X24=机械手顶针 Y40=关模 Y46=开模 Y54=开模完
机械手信号连线
日本川口
63=顶针 65=循环启动 206=开模 214=关模 258=安全门 297=闭模完 298=全自动 299=开模完
1=0V 3=24V
机械手信号连线
OUT16 =开 模完
机械手信号连线
力劲(2)
X09=安全门
X19=机械手完成信号
X11=关模完
Y08=关模
X16=机械手关模锁住 Y09=开模
X17=机械手开模锁住 Y20=开模完
X18=机械手托模锁住 Y22=全自动
机械手信号连线
力劲(3)
Y108=关模 Y109 =开模 Y123 =完全门 X120=开模完 X216=允许关模 X=允许顶出 X=取出完成(循环启动)
机械手信号连线
机械手信号连线
海天
C1(C2)=关模 C3(C4)=开模 B7=关模完 24V B21=安全门 24V B23=循环启动 38A/38B=开模完
机械手信号连线
全力发
146=取出机关模控制 143=顶针退 142=复动开始 141=顶针进 243=安全门 242=关模完 240=开模完
东华
X000= 完全门
X023= 循环启 动
Y000=锁 模
Y006=开 模
机械手信号连线
德马格
3=闭模 24V 4=顶针 24V 5=开模完 0V 8/9=安全门(如果这个点没用,用23/24代替)
机械手信号连线
震德
OUT2=开模 OUT8 =关模 OUT18 =吹风(开模完) IN2=安全门 IN12 =机械手连锁(循环启动) IN13 =可顶针 IN14=取出完成
机械手信号连线
海太
X000= 安全 门
X003= 锁模 完
X403= 机械 手连
机械手信号连线
日本住友
A12/B12=关模 A13/B13=开模 A14/B14=顶针 A15/B15=循环启动 A1/B1=闭模完 A3/B3=全自动 A4/B4=开模完 A5/B5=安全门
机械手信号连线
亿利达
X56=可 顶针
机械手信号连线
此课件下载可自行编辑修改,供参考! 感谢你的支持,我们会努力做得更好!
机械手信号连线
博创
I02=完全门 I12=可锁模 I13=可顶针 I14=循环启动 Y02=锁模 Y08=开模 Y21=开模完
机械手信号连线
伊之密
X1-01=安全门 24V X3-09=开模
X1-13=机械手连锁 24V
X1-14=机械手顶针 24V
X4-24=锁模终止 X4-25=开模终止
X1-15=机械手取出完成 X3-03=锁模 X4-26=全自动
301=允 许合 模
302=允 许顶 进
303=允 许顶 退
196=开 模完
101=安 全门
156=合 模阀
159=开 模阀
176=顶 机械手信号连线
台中精机
001/001A=关模 002/002A=开模 012/012A=顶进 013/013A=顶退 032=允许机械手动作 0V 104=安全门 129=允许关模动作 24V
Y123=开模完 20
注:20=110V
机械手信号连线
震雄(1)
100=安全门 24V 069=可取出 24V 070=用机械手(不用机械手时,此接点要通) 071=取出中 072=可以顶针 073=取出完成 038=开锁模
机械手信号连线
震雄(2)
00=安全门 401 21=循环启动
18=机械手连线 105=开模
19=成品
108=关模
20=顶针
123=开模完
注:19/21必须通断一次才能做全自动,18在 不用机械手时必须常通.
机械手信号连线
震雄(3)
00=安全门 32=机械手连线中 33=成品 34=顶针 35=循环启动 67=开锁模 86=开模完
机械手信号连线
Hale Waihona Puke 力劲(弘讯电脑)OUT01 =关 模
OUT03 =开 模