最小二乘法Matlab自编函数实现及示例
最小二乘法曲线拟合的Matlab程序
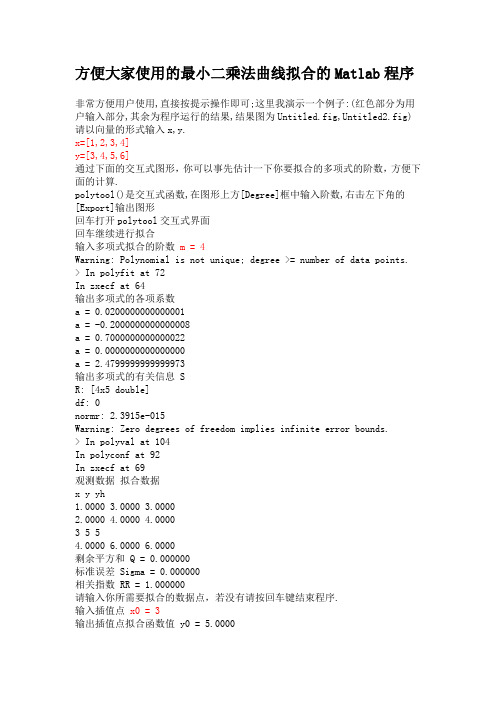
方便大家使用的最小二乘法曲线拟合的Matlab程序非常方便用户使用,直接按提示操作即可;这里我演示一个例子:(红色部分为用户输入部分,其余为程序运行的结果,结果图为Untitled.fig,Untitled2.fig) 请以向量的形式输入x,y.x=[1,2,3,4]y=[3,4,5,6]通过下面的交互式图形,你可以事先估计一下你要拟合的多项式的阶数,方便下面的计算.polytool()是交互式函数,在图形上方[Degree]框中输入阶数,右击左下角的[Export]输出图形回车打开polytool交互式界面回车继续进行拟合输入多项式拟合的阶数m = 4Warning: Polynomial is not unique; degree >= number of data points. > In polyfit at 72In zxecf at 64输出多项式的各项系数a = 0.0200000000000001a = -0.2000000000000008a = 0.7000000000000022a = 0.0000000000000000a = 2.4799999999999973输出多项式的有关信息 SR: [4x5 double]df: 0normr: 2.3915e-015Warning: Zero degrees of freedom implies infinite error bounds.> In polyval at 104In polyconf at 92In zxecf at 69观测数据拟合数据x y yh1.0000 3.0000 3.00002.0000 4.0000 4.00003 5 54.0000 6.0000 6.0000剩余平方和 Q = 0.000000标准误差 Sigma = 0.000000相关指数 RR = 1.000000请输入你所需要拟合的数据点,若没有请按回车键结束程序.输入插值点x0 = 3输出插值点拟合函数值 y0 = 5.0000>>结果:untitled.figuntitled2.fig一些matlab优化算法代码的分享代码的目录如下:欢迎讨论1.约束优化问题:minRosen(Rosen梯度法求解约束多维函数的极值)(算法还有bug) minPF(外点罚函数法解线性等式约束)minGeneralPF(外点罚函数法解一般等式约束)minNF(内点罚函数法)minMixFun(混合罚函数法)minJSMixFun(混合罚函数加速法)minFactor(乘子法)minconPS(坐标轮换法)(算法还有bug)minconSimpSearch(复合形法)2.非线性最小二乘优化问题minMGN(修正G-N法)3.线性规划:CmpSimpleMthd(完整单纯形法)4.整数规划(含0-1规划)DividePlane(割平面法)ZeroOneprog(枚举法)5.二次规划QuadLagR(拉格朗日法)ActivedeSet(起作用集法)6.辅助函数(在一些函数中会调用)minNT(牛顿法求多元函数的极值)Funval(求目标函数的值)minMNT(修正的牛顿法求多元函数极值)minHJ(黄金分割法求一维函数的极值)7.高级优化算法1)粒子群优化算法(求解无约束优化问题)1>PSO(基本粒子群算法)2>YSPSO(待压缩因子的粒子群算法)3>LinWPSO(线性递减权重粒子群优化算法)4>SAPSO(自适应权重粒子群优化算法)5>RandWSPO(随机权重粒子群优化算法)6>LnCPSO(同步变化的学习因子)7>AsyLnCPSO(异步变化的学习因子)(算法还有bug)8>SecPSO(用二阶粒子群优化算法求解无约束优化问题)9>SecVibratPSO(用二阶振荡粒子群优化算法求解五约束优化问题)10>CLSPSO(用混沌群粒子优化算法求解无约束优化问题)11>SelPSO(基于选择的粒子群优化算法)12>BreedPSO(基于交叉遗传的粒子群优化算法)13>SimuAPSO(基于模拟退火的粒子群优化算法)2)遗传算法1>myGA(基本遗传算法解决一维约束规划问题)2>SBOGA(顺序选择遗传算法求解一维无约束优化问题)3>NormFitGA(动态线性标定适应值的遗传算法求解一维无约束优化问题)4>GMGA(大变异遗传算法求解一维无约束优化问题)5>AdapGA(自适应遗传算法求解一维无约束优化问题)6>DblGEGA(双切点遗传算法求解一维无约束优化问题)7>MMAdapGA(多变异位自适应遗传算法求解一维无约束优化问题)自己编写的马尔科夫链程序A 代表一组数据序列一维数组本程序的操作对象也是如此t=length(A); % 计算序列“A”的总状态数B=unique(A); % 序列“A”的独立状态数顺序,“E”E=sort(B,'ascend');a=0;b=0;c=0;d=0;for j=1:1:ttLocalization=find(A==E(j)); % 序列“A”中找到其独立状态“E”的位置for i=1:1:length(Localization)if Localization(i)+1>tbreak; % 范围限定elseif A(Localization(i)+1)== E(1)a=a+1;elseif A(Localization(i)+1)== E(2)b=b+1;elseif A(Localization(i)+1)== E(3)c=c+1;% 依此类推,取决于独立状态“E”的个数elsed=d+1;endendT(j,1:tt)=[a,b,c,d]; % “T”为占位矩阵endTT=T;for u=2:1:ttTT(u,:)= T(u,:)- T(u-1,:);endTT; % 至此,得到转移频数矩阵Y=sum(TT,2);for uu=1:1:ttTR(uu,:)= TT(uu,:)./Y(uu,1);endTR % 最终得到马尔科夫转移频率/概率矩阵% 观测序列马尔科夫性质的检验:N=numel(TT);uuu=1;Col=sum(TT,2); % 对列求和Row=sum(TT,1); % 对行求和Total=sum(Row); % 频数总和for i=1:1:ttfor j=1:1:ttxx(uuu,1)=sum((TT(i,j)-(Row(i)*Col(j))./Total).^2./( (Row(i)*Col(j)). /Total));uuu=uuu+1; % 计算统计量x2endendxx=sum(xx)。
最小二乘法matlab程序
最小二乘法(Least Squares Method,LSM)是一种数值计算方法,用于拟合曲线,求解未知参数的值。
它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
本文将介绍最小二乘法在Matlab中的实现原理及程序编写。
一、最小二乘法的原理最小二乘法是一种数值计算方法,它的基本思想是,通过求解最小二乘误差的最优解,来拟合曲线,从而求得未知参数的值。
最小二乘法的基本原理是:给定一组数据点,用直线拟合这组数据点,使得拟合直线与这组数据点的误差的平方和最小。
具体地说,假设有一组数据点,其中每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
拟合这组数据点的直线通常用一元线性函数表示,即y=ax+b,其中a和b是未知参数。
最小二乘法的思想是:求出使误差的平方和最小的a和b,即求出最优解。
二、Matlab程序编写1. 准备工作首先,我们需要准备一组数据点,每个数据点都可表示为(x_i, y_i),i=1,2,3,...,n,其中x_i和y_i分别表示第i个数据点的横纵坐标。
例如,我们可以准备一组数据点:x=[1,2,3,4,5];y=[2,4,6,8,10];2. 程序编写接下来,我们就可以开始编写Matlab程序了。
首先,我们需要定义一个一元线性函数,用于拟合这组数据点。
函数的形式为:y=ax+b,其中a和b是未知参数。
%定义函数f=@(a,b,x)a*x+b;然后,我们需要定义一个误差函数,用于计算拟合直线与这组数据点的误差的平方和。
%定义误差函数error=@(a,b)sum((y-f(a,b,x)).^2);最后,我们就可以使用Matlab提供的fminsearch函数,求解最小二乘误差的最优解,即求出最优a和b的值。
%求解最优解[a,b]=fminsearch(error,[1,1]);经过上面的程序编写,我们就可以求得未知参数a和b的最优值。
matlab function编程最小二乘法
matlab function编程最小二乘法在MATLAB中,使用最小二乘法拟合数据通常涉及到使用函数进行编程。
以下是一个简单的MATLAB函数,用于实现最小二乘法拟合直线的例子:function [coefficients, fittedData] = leastSquaresFit(x, y, degree)% x: 输入数据的 x 值% y: 输入数据的 y 值% degree: 拟合多项式的次数% 创建 Vandermonde 矩阵A = zeros(length(x), degree + 1);for i = 1:degree + 1A(:, i) = x.^(degree + 1 - i);end% 使用最小二乘法计算系数coefficients = (A' * A)\(A' * y);% 生成拟合曲线的数据fittedData = polyval(coefficients, x);% 绘制原始数据和拟合曲线figure;plot(x, y, 'o', x, fittedData, '-');legend('原始数据', '拟合曲线');xlabel('X轴');ylabel('Y轴');title('最小二乘法拟合');end你可以通过调用这个函数并提供你的数据和拟合多项式的次数来进行最小二乘法拟合。
例如:x = [1, 2, 3, 4, 5];y = [2.1, 2.8, 3.4, 3.7, 4.2];degree = 1;[coefficients, fittedData] = leastSquaresFit(x, y, degree);disp('拟合系数:');disp(coefficients);这是一个简单的线性拟合的例子。
你可以根据需要修改该函数,以适应高次多项式的情况。
最小二乘法曲线拟合-原理及matlab实现
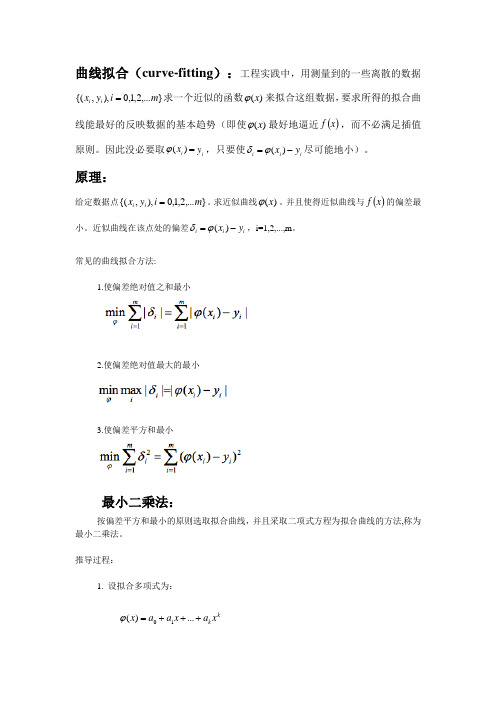
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:kk x a x a a x +++=...)(10ϕ2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了:.......4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个范德蒙得矩阵化简后可得到:6. 也就是说X*A=Y ,那么A = (X'*X)-1*X'*Y ,便得到了系数矩阵A ,同时,我们也就得到了拟合曲线。
MATLAB实现:MATLAB提供了polyfit()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y为数据点,n为多项式阶数,返回p为幂次从高到低的多项式系数向量p。
x 必须是单调的。
矩阵s包括R(对x进行QR分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
matlab quadprog 最小二乘法

matlab quadprog 最小二乘法
在MATLAB中,可以使用`quadprog`函数来实现最小二乘法。
最小二乘法是一种用于拟合数据的常见方法,它的目标是通过最小化残差平方和来找到最佳拟合曲线或平面。
`quadprog`函数的语法如下:
```
x = quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
```
其中,`H`是一个对称正定的二阶矩阵,`f`是一个列向量,`A`和`b`是约束条件的不等式矩阵和向量,`Aeq`和`beq`是约束条件的等式矩阵和向量,`lb`和`ub`是变量的下界和上界向量,`x0`是可选的初始解向量,`options`是一个包含参数设置的结构体。
通过调用`quadprog`函数,可以得到一个优化问题的最优解向量`x`。
在最小二乘法中,我们可以将拟合问题表示为一个线性回归问题,其中最小二乘解就是回归系数的最佳估计。
我们可以使用`quadprog`函数来求解最小二乘问题的最优解。
具体应用最小二乘法时,需要根据具体的问题定义目标函数、约束条件和起始解等参数。
然后使用`quadprog`函数来解决问题并得到最优解。
matlab 最小二乘 超定方程 举例
Matlab中的最小二乘法在解决超定方程组问题时起到了很大的作用。
下面我们将以实际的例子来说明Matlab如何使用最小二乘法解决超定方程组问题。
1. 我们需要明确什么是超定方程组。
超定方程组是指方程的数目大于未知数的数目,这样的方程组往往没有精确解。
在实际问题中,经常会遇到这样的情况,例如在数据拟合、信号处理、控制系统等领域。
2. 我们需要了解最小二乘法的原理。
最小二乘法是一种数学优化方法,通过最小化误差的平方和来求解未知参数。
在超定方程组中,最小二乘法可以用来寻找方程组的最佳拟合解,即使得方程组的误差最小化的解。
3. 接下来,我们以一个简单的线性拟合问题来演示Matlab中最小二乘法的应用。
假设我们有一组数据点(x,y),其中x是自变量,y是因变量。
我们希望找到一条直线y=ax+b来最佳拟合这组数据点。
这意味着我们需要找到参数a和b使得数据点到直线的误差最小。
4. 在Matlab中,我们可以使用polyfit函数来进行最小二乘拟合。
该函数的调用方式为:``` matlabp = polyfit(x, y, 1);```其中x和y是数据点的坐标,1表示拟合的多项式次数,这里是一次直线拟合。
调用polyfit函数后,我们可以得到拟合出的直线的系数。
5. 为了验证拟合的效果,我们可以使用polyval函数来计算拟合出的直线在自变量x处的预测值。
该函数的调用方式为:``` matlaby_fit = polyval(p, x);```y_fit就是拟合出的直线在对应x处的预测值。
6. 我们可以将原始数据点和拟合出的直线一起绘制在同一张图上,以直观地看出拟合效果如何。
我们可以使用plot函数来绘制数据点和直线,使用legend函数来加上图例,方便对比。
通过以上步骤,我们可以在Matlab中使用最小二乘法来解决超定方程组问题,例如进行数据拟合、信号处理等。
这种方法可以帮助我们找到最佳拟合方程,从而更好地理解数据的特性,或者用于预测未知数据点的结果。
matlab中最小二乘法
matlab中最小二乘法最小二乘法是一种常用的数学方法,可以用来拟合一组数据,得到一个近似函数。
在Matlab 中,可以使用内置函数“polyfit”来进行最小二乘法拟合。
具体步骤如下:1.准备数据:将样本数据存储在一个向量或矩阵中。
2.选择一个合适的拟合函数:确定拟合函数的形式(线性、二次、指数等),并用该函数创建一个匿名函数。
3.使用“polyfit”函数拟合数据:将数据和拟合函数作为输入,使用“polyfit”函数进行最小二乘法拟合。
4.绘制拟合曲线:使用“polyval”函数和拟合系数,以及一组测试点,生成拟合曲线。
5.计算拟合误差:使用“norm”函数和拟合曲线,计算实际数据和拟合数据之间的平均误差。
以下是一个简单的示例代码,演示如何使用最小二乘法拟合一组数据到一个线性函数:x = [1,2,3,4,5,6,7];y = [1.1,1.9,3.2,4.1,5.1,5.8,7.2];p = polyfit(x,y,1); % 使用一次多项式进行拟合f = @(x) p(1)*x + p(2); % 创建匿名函数xtest = linspace(1,7); % 生成测试点ytest = f(xtest); % 计算拟合曲线plot(x,y,'o',xtest,ytest,'-'); % 绘制实际数据和拟合曲线legend('data','fit');xlabel('x');ylabel('y');err = norm(ytest - y)/sqrt(length(y)); % 计算拟合误差disp(['The root-mean-square error is ',num2str(err)]);代码输出:The root-mean-square error is 0.22777这表明,拟合误差的均方根值为0.22777,表示拟合效果良好。
matlab 最小二乘法

在Matlab中,可以使用“\”或者pinv函数进行最小二乘法的求解。
下面给出一个使用“\”运算符进行最小二乘法的例子:
假设有一个线性方程组Ax = b,其中$A$ 是m×n的矩阵,x是n×1的未知向量,b 是m×1的已知向量,且m>n。
最小二乘法的目标是找到一个x,使得Ax≈b,即∥Ax−b∥最小。
使用Matlab中的“\”运算符求解最小二乘法的代码如下:
% 生成数据
x = [0:0.1:1]';
y = 2*x + randn(size(x))*0.1;
% 构造矩阵A和向量b
A = [x, ones(size(x))];
b = y;
% 求解最小二乘问题
x_ls = A \ b;
% 输出结果
fprintf('斜率:%f,截距:%f\n', x_ls(1), x_ls(2));
在这个例子中,我们生成了一个带噪声的数据集,然后构造了矩阵A 和向量b,其中A的第一列为x,第二列为常数项1。
最后,使用“\”运算符求解最小二乘问题,并输出斜率和截距的值。
需要注意的是,在实际应用中,最小二乘法的精度和稳定性可能会受到多种因素的影响,如数据噪声、矩阵奇异性等等。
因此,在使用最小二乘法时需要对数据和算法进行充分的分析和优化,以保证结果的准确性和可靠性。
最小二乘法MATLAB程序及结果

最小二乘递推算法的MATLAB仿真针对辨识模型,有z(k)-+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k)模型结构,对其进行最小二乘递推算法的MATLAB仿真,对比真值与估计值。
更改a1、a2、b1、b2参数,观察结果。
仿真对象:z(k)-1.5*z(k-1)+0.7*z(k-2)=u(k-1)+0.5*u(k-2)+v(k)程序如下:L=15;y1=1;y2=1;y3=1;y4=0; %四个移位寄存器的初始值for i=1:L; %移位循环x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4; %取出作为输出信号,即M序列if y(i)>0.5,u(i)=-0.03; %输入信号else u(i)=0.03;endy1=x1;y2=x2;y3=x3;y4=x4;endfigure(1);stem(u),grid onz(2)=0;z(1)=0;for k=3:15;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %输出采样信号endc0=[0.001 0.001 0.001 0.001]'; %直接给出被识别参数的初始值p0=10^6*eye(4,4); %直接给出初始状态P0E=0.000000005;c=[c0,zeros(4,14)];e=zeros(4,15);for k=3:15; %开始求kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]';x=h1'*p0*h1+1;x1=inv(x);k1=p0*h1*x1; %开始求k的值d1=z(k)-h1'*c0;c1=c0+k1*d1;e1=c1-c0;e2=e1./c0; %求参数的相对变化e(:,k)=e2;c0=c1;c(:,k)=c1;p1=p0-k1*k1'*[h1'*p0*h1+1]; %求出P(k)的值p0=p1;if e2<=E break;endendc,e %显示被辨识参数及其误差情况a1=c(1,:);a2=c(2,:);b1=c(3,:);b2=c(4,:);ea1=e(1,:);ea2=e(2,:);eb1=e(3,:);eb2=e(4,:);figure(2);i=1:15;plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':')title('Parameter Identification with Recursive Least Squares Method')figure(3);i=1:15;plot(i,ea1,'r',i,ea2,'g',i,eb1,'b',i,eb2,'r:')title('Identification Precision')程序运行结果:p0 =1000000 0 0 00 1000000 0 00 0 1000000 00 0 0 1000000c =Columns 1 through 90.0010 0 0.0010 -0.4984 -1.2325 -1.4951 -1.4962 -1.4991 -1.49980.0001 0 0.0001 0.0001 -0.2358 0.6912 0.6941 0.6990 0.69980.0010 0 0.2509 1.2497 1.0665 1.0017 1.0020 1.0002 0.99990.0010 0 -0.2489 0.7500 0.5668 0.5020 0.5016 0.5008 0.5002Columns 10 through 15-1.4999 -1.5000 -1.5000 -1.5000 -1.4999 -1.49990.6999 0.7000 0.7000 0.7000 0.7000 0.70000.9998 0.9999 0.9999 0.9999 0.9999 0.99990.5002 0.5000 0.5000 0.5000 0.5000 0.5000e =1.0e+003 *Columns 1 through 90 0 0 -0.4994 0.0015 0.0002 0.0000 0.0000 0.00000 0 0 0 -2.3592 -0.0039 0.0000 0.0000 0.00000 0 0.2499 0.0040 -0.0001 -0.0001 0.0000 -0.0000 -0.00000 0 -0.2499 -0.0040 -0.0002 -0.0001 -0.0000 -0.0000 -0.0000Columns 10 through 150.0000 0.0000 0.0000 -0.0000 -0.0000 0.00000.0000 0.0000 -0.0000 0.0000 0.0000 0.0000-0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000-0.0000 -0.0000 0.0000 -0.0000 0.0000 -0.0000程序运行曲线:图1.输入信号图2.a1,a2,b1,b2辨识仿真结果图3. a1,a2,b1,b2各次辨识结果收敛情况分析:由运行结果可看出,输出观测值没有任何噪声成分时,辨识结果最大相对误差达到3位数。
Matlab中的最小二乘问题与线性回归
Matlab中的最小二乘问题与线性回归引言:线性回归是一种常见的统计分析方法,广泛应用于各个领域。
而最小二乘法则是线性回归中最基本的方法之一,用于求解最佳拟合直线。
在本文中,我们将探讨Matlab中的最小二乘问题与线性回归,包括算法原理、实现步骤以及应用案例等内容。
一、最小二乘法的原理最小二乘法是一种常用的参数估计方法,通过最小化误差平方和来求解拟合直线的系数。
在线性回归中,我们可以假设因变量y与自变量x之间存在线性关系:y = β0 + β1x + ε其中,y表示因变量,x表示自变量,β0和β1表示拟合直线的截距和斜率,ε表示残差项。
最小二乘法的目标是选择最优的β0和β1,使得误差平方和e的值最小:e = ∑(y - (β0 + β1x))^2二、Matlab中的最小二乘法函数在Matlab中,最小二乘法可以通过调用polyfit函数实现。
polyfit函数的语法如下:p = polyfit(x, y, n)其中,x和y分别表示自变量和因变量的数据,n表示拟合直线的阶数。
通过指定n为1,即可以实现线性回归。
polyfit函数会返回拟合直线的系数,即β0和β1。
下面以一个实例来展示如何使用polyfit函数实现最小二乘法:x = [1, 2, 3, 4, 5];y = [3, 4, 5, 6, 7];p = polyfit(x, y, 1);拟合直线的系数会存储在p中,p(1)表示截距,p(2)表示斜率。
三、最小二乘法的应用案例最小二乘法在实际应用中非常广泛,在各个领域都有着重要的作用。
下面以某电子产品销售数据为例来演示最小二乘法的应用。
假设某公司在过去5年间的销售额如下:年份: 1 2 3 4 5销售额: 20 30 40 50 60现在我们需要通过最小二乘法来预测第6年的销售额。
首先,将年份和销售额分别存储在x和y中,然后调用polyfit函数进行拟合:x = [1, 2, 3, 4, 5];y = [20, 30, 40, 50, 60];p = polyfit(x, y, 1);调用polyval函数可以利用拟合系数来预测第6年的销售额:x_pred = 6;y_pred = polyval(p, x_pred);通过运行以上代码,最终可以得到第6年的销售额预测值y_pred。
最小二乘法原理及其MATLAB实现

最小二乘法原理及其MATLAB实现一、本文概述最小二乘法是一种广泛应用于数学、统计学、工程学、物理学等众多领域的数学优化技术。
其核心原理在于通过最小化误差的平方和来寻找最佳函数匹配,从而实现对数据的最佳逼近。
本文将对最小二乘法的原理进行详细阐述,并通过MATLAB编程实现,帮助读者深入理解并掌握这一强大的数据分析工具。
文章将首先介绍最小二乘法的基本原理,包括其历史背景、基本概念以及数学模型的构建。
然后,通过实例分析,展示如何应用最小二乘法进行线性回归模型的拟合,以及如何处理过拟合和欠拟合等问题。
接着,文章将详细介绍如何在MATLAB中实现最小二乘法,包括数据准备、模型构建、参数估计以及结果可视化等步骤。
文章还将对最小二乘法的优缺点进行讨论,并探讨其在不同领域的应用前景。
通过本文的学习,读者将能够全面理解最小二乘法的原理和应用,掌握其在MATLAB中的实现方法,为实际工作中的数据处理和分析提供有力支持。
二、最小二乘法原理最小二乘法(Least Squares Method)是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配。
这种方法起源于19世纪的统计学,由数学家阿德里安-马里·勒让德(Adrien-Marie Legendre)和卡尔·弗里德里希·高斯(Carl Friedrich Gauss)分别独立发展。
建立模型:我们需要建立一个描述数据关系的数学模型。
这通常是一个线性方程,如 y = ax + b,其中 a和b是待求解的参数。
误差计算:对于给定的数据集,我们可以将每个数据点代入模型中进行计算,得到预测值。
预测值与真实值之间的差异就是误差。
平方误差和:为了衡量模型的拟合程度,我们需要计算所有误差的平方和。
这是因为平方误差和能够更好地反映误差的大小,尤其是在误差较大时。
最小化平方误差和:最小二乘法的核心思想是找到一组参数,使得平方误差和达到最小。
这通常通过求导和令导数等于零来实现,从而找到使平方误差和最小的参数值。
最小二乘法 matlab
最小二乘法(附MATLAB代码)今天我主要是从如何使用MATLAB实现最小二乘法,首先给出今天重点使用的两个函数。
比如我想拟合下面这组数据x=[9,13,15,17,18.6,20,23,29,31.7,35];y=[-8,-6.45,-5.1,-4,-3,-1.95,-1.5,-0.4,0.2,-0.75];我先用matlab将这组离散点画出来,plot(x,y,'o')嗯,大概这个样子,这时我们想使用一次函数拟合上述曲线,可使用以下代码clearclcx=[9,13,15,17,18.6,20,23,29,31.7,35];y=[-8,-6.45,-5.1,-4,-3,-1.95,-1.5,-0.4,0.2,-0.75];coeff icient=polyfit(x,y,1); %用一次函数拟合曲线,想用几次函数拟合,就把n设成那个数y1=polyval(coefficient,x);%plot(x,y,'-',x,y1,'o'),这个地方原来'-'和'o'写反了,现已更正,可以得到正确的图形。
plot(x,y,'o',x,y1,'-')得到的结果是coefficient=[0.2989,-9.4107]所以得到的一次函数为y=0.2989*x-9.4107同理如果用二次函数拟合该曲线,得到的各项系数为coefficient=[-0.0157 1.0037 -16.2817]所以得到的二次函数为y=-0.0157*x^2+1.0037*x-16.2817其他阶数依此类推。
但是使用polyfit(x,y,n)函数有一个注意事项:举个例子,比如说我们想用9阶多项式拟合上述曲线时,我们发现拟合的曲线是正常的,得到的各项系数也是正常的但是当我们用10阶多项式拟合曲线时,此时各项系数如下,得到的曲线如下很明显出现了问题,所以使用polyfit(x,y,n)函数时要严格遵守上述事项。
最小二乘法曲线拟合_原理及matlab实现
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了: .......4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个范德蒙得矩阵化简后可得到:6. 也就是说X*A=Y ,那么A = (X'*X)-1*X'*Y ,便得到了系数矩阵A ,同时,我们也就得到了拟合曲线。
MATLAB 实现:MATLAB 提供了polyfit ()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y 为数据点,n 为多项式阶数,返回p 为幂次从高到低的多项式系数向量p 。
x 必须是单调的。
矩阵s 包括R (对x 进行QR 分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
用Matlab作最小二乘及微分方程
用Matlab作最小二乘及微分方程用Matlab 作最小二乘曲线拟合已知?m m y y y y x x x x ......1010::,要用一个函数)(x f 来近似代表y ,此函数中含有几个待定参数n a a a ,...,,21,现在的任务是:确定参数的值,使得在节点处的总误差∑=-m i i i y x f 02))((达到最小。
用Matlab 计算:先按照)(x f 建立一个函数文件,文件第一句格式为:function f=文件名(参数组, 节点数组)再用下面命令格式:参数组=lsqcurvefit (‘函数文件名’,参数组初值,节点数组,函数值数组)例:对函数C=C(t)测量得下面一组数据:t : 1 2 3 4 5 6 7 8 9C :4.54, 4.99, 5.35, 5.65, 5.90, 6.10, 6.26, 6.39, 6.50用函数x a e a a y 321-+=作拟合,并画图显示拟合效果,给出节点处总误差。
先建立并保存函数文件:文件名syp78hswj 内容为:function f=syp78hswj(a,x0)f=a(1)+a(2)*exp(-a(3)*x0);再下面主程序:clearhold onx0=1:9;y0=[4.54,4.99,5.35,5.65,5.90,6.10,6.26,6.39,6.50];for i=1:9plot(x0(i),y0(i),'+')endcscz=[1,1,1];a=lsqcurvefit('syp78hswj',cscz,x0,y0)x=0:0.2:10;f=syp78hswj(a,x);plot(x,f)f=syp78hswj(a,x0);wc=sqrt(sum((f-y0).^2))hold off执行得:)2031.0,9911.2,9805.6(),,(321-=a a a 节点处总误差wc=0.0076 题1: bn an t +=2求 a=? b=?t 0 20 40 60 80 100 120 140 160 183.5n 0 1153 2045 2800 3466 4068 4621 5135 5619 6152答案:,1051.26-?=a .1044.12-?=b题2: ct be a C -+= 求 a=? b=? c=? 节点处总误差=?t : 1 2 3 4 5 6 7 8 9 10C :4.54,4.99,5.35,5.65,5.90,6.10,6.26,6.39,6.50,6.59 .答案:a=6.9811, b= -2.9918, c=0.2031 节点处总误差=0.0077 微分方程数值解 ??=≤≤-=.1)0(,10,2y x y x y dx dy 现以步长h=0.1求数值解:先建立“函数M —文件”:function f=eqs1(x,y)f=y-2*x/y;将此函数文件,以文件名eqs2保存.再命令:格式为: [自变量,因变量]=ode45(‘函数文件名’,节点数组,初始值) 命令为: [x,y]=ode45('eqs1',0:0.1:1,1)==+-='≤≤-+='.3.0)0(,2.0)0(,2sin ,10,2cos 21212211y y y y x y x y y x y 只须向量化,即可用前面方法:function f=eqs2(x,y)f=[cos(x)+2*y(1)-y(2);sin(x)-y(1)+2*y(2)];将此函数文件以文件名eqs2保存后,再下命令:[x,y]=ode45('eqs2',0:0.1:1,[0.2;0.3]) (注:输出的y 是矩阵,第i 列为函数i y 的数值解)要画图,就命令plot(x,y(:,1)), 及命令plot(x,y(:,2))22))10(9())20(16()20(161)(-+---?='X Y Y t X 22))10(9())20(16()10(91)(-+--?='X Y X t Y 22))()(())()(()()()(t y t Y t x t X t x t X w t x -+--?='22))()(())()(()()()(t y t Y t x t X t y t Y w t y -+--?='X (0)=30 , Y (0)=20 . x (0)=0 , y (0)=0 .当w =20时,function f=eqseqs20(t,y)w=20;aa=-16*(y(2)-20);bb=9*(y(1)-10);fm=sqrt(aa^2+bb^2);cc=y(1)-y(3);dd=y(2)-y(4);fm2= sqrt(cc^2+dd^2);f=[aa/fm;bb/fm;w*cc/fm2;w*dd/fm2];将此函数文件,以文件名eqseqs20保存后,再下命令:[t,y]=ode45('eqseqs20',0:0.1:1,[30;20;0;0])(注:输出y 是矩阵,第1、2、3、4列分别为函数X(t)、Y(t)、x(t)、y(t) 的数值解)要画图,继续命令:hold on,plot(y(:,1),y(:,2)),grid,plot(y(:,3),y(:,4)),hold off结果:当人速=1 狗速=20 时 t=1.9秒追击到。
最小二乘法的多项式拟合(matlab实现)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 最小二乘法的多项式拟合(matlab实现) 最小二乘法的多项式拟合(matlab 实现) 用最小二乘法进行多项式拟合(matlab 实现)西安交通大学徐彬华算法分析:, 1, 2, 3, . . , m) , 一共 m+1 个数据点,取多项式P(x) , 使函数 P(x) 使得其中, a0, a1, a2, ,an 为待求未知数, n 为多项式的最高次幂,由此,该问题化为求的极值问题。
由多元函数求极值的必要条件:j=0, 1, , n 得到:j=0, 1, , n 这是一个关于 a0, a1, a2, , an 的线性方程组,用矩阵表示如下:及其个数 m,再给出所要拟合的参数 n,则即可求出未知数矩阵(a0, a1, a2, , an)试验题 1 编制以函数 xkn k 0 为基的多项式最小二乘拟合程序,并用于对下列数据作三次多项式最小二乘拟合(取权函数 wi1) 总共有 7 个数据点,令m=6 第一步:画出已知数据的的散点图,确定拟合参数 n; x=-1. 0:0. 5: 2. 0; y=[-4. 447, -0. 452, 0. 551, 0. 048, -0. 447, 0. 549, 4. 552]; plot(x, y, ‘ *’ ) xlabel ‘ x 轴’ ylabel ‘ y 轴’ title ‘ 散点图’ hold on 因此将拟合参数 n 设为 3.1/ 7第二步:计算矩阵 ) *x. +a(4) *x. ‘ ) title(‘ 拟合图‘ ) 总程序附下:x=-1. 0:0. 5: 2. 0; y=[-4. 447, -0. 452, 0. 551, 0. 048,-0. 447, 0. 549, 4. 552]; plot(x, y, ‘ *’ ) xlabel ‘ x 轴’ ylabel ‘ y 轴’ title ‘ 散点图’ hold on m=6; n=3; A=ze: 2. 0]; z=a(1) +a(2) *x+a(3) *x. +a(4)*x. ; plot(x, z) legend(‘ 离散点’ , ‘ y=a(1) +a(2)*x+a(3) *x. +a(4) *x. ‘ ) title(‘ 拟合图’ ) Qs4Rt6Sv7Uw8VxaWz bXAcZBe#Df!Eg%FiHj*Ik) J m-Kn+Mo1Nq2Or3Qs5Rt6Sv7Uw9VxaWzbYAcZ Be#Df $Eg%Fi Hj(Ik) Jm-Ln + Mo1Nq2Pr3Qs5 Ru6Sv 7Uw9Vya WzbYAdZBe#D f $Eh%FiHj(Il ) Jm-Ln0Mo1Nq 2Pr4Qs5Ru6T v 7Uw9VyaXzbYA dZCe# Df$Eh%G iHj(Il) Km-Ln0Mp1Nq2Pr4Q t5Ru6T v8Uw9V yaXzcYAdZCe!Dg$Eh%Gi*Hj( Il) Km+ Ln0Mp1 Oq2Pr4Qt5Su6Tv8Ux9VyaXzc YBdZCe! Dg$Fh %Gi*Hk(Il) Km+Lo0Mp1Oq3Pr 4Qt5Su 7Tv8Ux 9WyaXzcYBd#Ce!Dg$FhGi*H k(Jl) Km+Lo0N p1Oq3Ps4Qt5Su7Tw8Ux9WybX zcYBd#Cf!Dg$ FhGj*Hk(Jl-Km+Lo0Np2Oq3 Ps4Rt5Su7Tw8 Vx9WybXAcZB d #Cf! Eg$FhGj *Ik(J l-Kn+Lo 0Np2Or 3Ps4Rt6Su7Tw8VxaW ybXAcZB e#Cf! Eg%FhGj*Ik) J l-Kn+Mo0Np2 Or3Qs4R t6Sv7 Tw8VxaWzbXAc ZBe#Df!Eg%Fi Gj*Ik)Jm-Kn +Mo1Np2Or3Qs5Rt6Sv7Uw8Vx aWzbYA cZBe#D f$Eg%FiHj*Ik) Jm-Ln+Mo1N q2Or3Qs5Ru6S---------------------------------------------------------------最新资料推荐------------------------------------------------------v7Uw9VyaWzbYAdZBe#Df$Eh% FiHj( Ik) Jm- Ln0Mo1Nq2Pr3Qs5Ru6Tv7Uw9 VyaXzbY AdZCe #Df$Eh%GiHj(Il) Jm-Ln0Mp 1Nq2Pr 4Qs5Ru 6Tv8Uw9VyaXzcYAdZCe! Df$E h%Gi*H j(Il) K m-Ln0Mp1Oq2Pr4Qt5Ru6Tv8U x9VyaX zcYBdZ Ce!Dg$Eh%Gi*Hk(Il) Km+Ln0 Mp1Oq3Pr4Qt5 Su7Tv8Ux9WyaXzcYBd#Ce!Dg $Fh%Gi*Hk(Jl ) Km+Lo0Mp1Oq3Ps4Qt5Su7Tw 8Ux9Wy bXzcYB d#Cf! Dg$FhGi*Hk(Jl-Km+L o0Np1Oq3Ps4Rt5Su7Tw8Vx9 W ybXAcYBd#Cf !Eg$FhG j*Hk (Jl-Kn+Lo0Np 2Oq3Ps4Rt6Su 7Tw8Vxa WybXA cZBd#Cf!Eg%F h Gj*Ik(Jl-K n+Mo0Np2Or3Q s4Rt6Sv7Tw8V xa WzbXAcZBe# Cf! Eg%FiGj* Ik) Jl-Kn+Mo1 Np 2Or3Qs5Rt6 Sv7Uw8Vx aWzb YAcZBe#Df!Eg %F iHj*Ik) Jm -Kn+Mo1N q2Or 3Qs5Ru6Sv7Uw 9V xaWzbYAdZB e#Df$Eg%FiH j(Ik) Jm-Ln+M o 1Nq2Pr3Qs5R u6Tv7Uw9VyaW zbYAdZCe#Df$ E h%FiHj(Il) Jm-Ln0Mp 1Nq2 Pr4Qs5Ru6Tv8 U w9VyaXzbYAd ZCe!Df$E h%Gi Hj(Il) Km-Ln 0Mp1Oq2Pr4Qt 5Ru6Tv8Ux9Vy aXzcYAdZCe!D g $Eh%Gi*Hj(I l) Km+Ln 0Mp1O q3Pr4Qt5Su6T v8Ux9WyaXzcY BdZCe! D g$Fh% Gi*Hk(Il) Km+ L o0Mp1 Oq3Ps4Qt5Su7Tv 8Ux 9WybXzcYBd#C e!Dg$FhGi*H k(Jl-Km+ Lo0N p1Oq3Ps4Rt5S u7Tw8Ux9WybX AcYBd#Cf ! Dg$ FhGj*Hk(Jl- Kn+Lo0Np2Oq3 Ps4Rq2Pr4 Qt5 Ru6Tv8Uw9Vya XzcYAdZCe!Df $Eh%Gi*Hj(Il ) Km-Ln0Mp1Oq2P r4Qt5Su 6Tv8Ux9VyaXzcYBdZCe!Dg$E h%Gi*Hk(Il) K m+Ln0Mp1Oq3Pr4Qt5Su7Tv8U x9Wya XzcYBd# Ce!3/ 7Dg$Fh%Gi*Hk(Jl) Km+Lo0 Mp1Oq 3Ps4Qt5 Su7Tw8Ux9Wy b XzcYBd#Cf!Dg $FhG i*Hk(Jl -Km+Lo0Np2O q 3Ps4Rt5Su7Tw 8Vx9W ybXAcYB d#Cf!Eg$FhG j*Hk(Jl-Kn+L o0Np2O r3Ps4R t6Su7Tw8VxaWybXAcZBd#Cf! Eg%Fh Gj*Ik( Jl-Kn+Mo0Np2Or3Qs4Rt6Sv7 Tw8Vxa WzbXAc ZBe#Cf!Eg%FiGj*Ik) Jl-Kn +Mo1Np 2Or3Qs 5Rt6Sv7Uw8VxaWzbYAcZBe#D f!Eg%F iHj*I k) Jm-Ln+Mo1Nq2Or3Qs5Ru6S v7Uw9V xaWzbY AdZBe#Df$Eg%FiHj(Ik) Jm- Ln0Mo1Nq2Pr3 Qs5Ru6Tv7Uw9VyaWzbYAdZCe #Df$Eh%FiHj (Il) Jm -Ln0Mp 1Nq2Pr4Qs5R u6Tv8Uw 9VyaX zbYAdZCe!Df$ E h%GiHj(Il) Km-Ln0Mp1Oq2 Pr4Qt5Ru6Tv8Ux9VyaXzcYAd ZCe! Dg $Eh%Gi *Hk(Il) Km+Ln0Mp1Oq3Pr4Qt 5Su6Tv 8Ux9Wy aXzcYBdZCe!Dg$Fh%Gi*Hk(J l) Km+Lo0Mp1O q3Ps4Qt5Su7Tv8Ux9WybXzcY Bd#Ce!Dg$Fh Gi*Hk(Jl-Km+Lo0Np1Oq3Ps4 Rt5Su7Tw8Ux9 WybXAcYBd#Cf!Dg$FhGj*Hk (Jl-Kn +Lo0Np 2Oq3Ps4Rt6Su7Tw8Vx9WybXA cZBd#C f!Eg%F hGj*Ik(Jl-K n +Mo0Np2Or3P s4Rt6Sv 7Tw8V xaWybXAcZBe# C f! Eg%FiGj* Ik) Jl- Kn+Mo1 Np2Or3Qs4Rt6Sv7Uw8VxaWzb XAcZBe# Df!Eg %FiHj*Ik) Jm-Kn+Mo1Nq2Or 3Qs5Rt6Sv7Uw 9VxaWzbYAcZBe#Df$Eg%FiH j(Ik) Jm-Ln+Mo1Nq2Pr3Qs5 R u6Sv7Uw9Vya WzbYAdZ Ce#Df $Eh%FiHj(Il )Jm-Ln0Mo1Nq 2Pr4Qs5R u6Tv 7Uw9VyaXzbYA dZCe!Df$Eh%G iHj(IlGj*I k) Jl-Kn+Mo0N p2Or3Qs4Rt6S v7Tw8Vxa---------------------------------------------------------------最新资料推荐------------------------------------------------------ WzbX AcZBe#Cf! Eg% FiGj*Ik) Jm- Kn+Mo1Np 2Or3 Qs5Rt6Sv7Uw8 V xaWzbYAcZBe #Df!Eg%F iHj *Ik) Jm-Ln+Mo 1Nq2Or3Qs5Ru 6Sv7Uw9VxaWz bYAdZBe#Df$E g %FiHj(Ik) J m-Ln0Mo1Nq2P r3Qs5Ru6Tv7U w9VyaWzbYAdZ Ce#Df$Eh %Gi Hj(Il) Jm-Ln0 M p1Nq2Pr4Qs5 Ru6Tv8U w9Vya XzbYAdZCe!Df $Eh%Gi*Hj(Il ) Km-Ln0Mp1Oq 2Pr4Qt5Ru6Tv 8Ux9VyaXzcYA dZCe!Dg $Eh%G i*Hk(Il) Km+L n0Mp1Oq3Pr4Q t5Su6Tv 8Ux9W yaXzcYBdZCe! D g$Fh% Gi*Hk(Jl) Km+L o0Mp 1Oq3Ps4Qt5Su 7T v8Ux9WybXz cYBd#Cf!Dg$F hGi*Hk(Jl-K m+ Lo0Np1Oq3P s4Rt5Su7Tw8U x9WybXAcYBd# Cf!Eg$FhGj* Hk(Jl-Kn+Lo0Np2O q0Mp1Nq 2Pr4Qt5Ru6Tv8Uw9VyaXzcYA dZCe!Df$Eh%G i*Hj(Il) Km+Ln0Mp1Oq2Pr4Q t5Su6T v8Ux9V yaXzcYBdZCe!Dg$Eh%Gi*Hk( Il) Km+ Lo0Mp1 Oq3Pr4Qt5Su7Tv8Ux9WyaXzc YBd#Ce!Dg$Fh Gi*Hk(Jl) Km+Lo0Np1Oq3Ps 4Qt5Su 7Tw8Ux 9WybXzcYBd#Cf! Dg$FhGj*H k(Jl- Km+Lo0N p2Oq3Ps4Rt5S u7Tw8Vx9WybX AcYBd #Cf!Eg$ FhGj*Ik(Jl-Kn+Lo0Np2Or3 Ps4Rt6Su7Tw8 VxaWybXAcZB d #Cf! Eg%FhGj *Ik) J l-Kn+Mo 0Np2Or3Qs4Rt6Sv7Tw8VxaWz bXAcZB e#Df!E g%FiGj*Ik) Jm-Kn+Mo1Np2O r3Qs5R t6Sv7U w8VxaWzbYAcZBe#Df$Eg%Fi Hj*Ik)Jm-Ln+ Ml-Km+Lo0Np1Oq3Ps4Rt5Su7 Tw8Ux9WybXAc YBd#Cf ! Dg$Fh Gj*Hk(Jl-K n+Lo0Np 2Oq3P s4Rt6Su7Tw8Vx9WybXAcZBd# Cf!Eg$F5/ 7hGj* Ik(Jl-Kn+Mo0Np2Or3Ps4Rt6 Sv7Tw8V xaWyb XAcZBe#Cf! Eg%FhGj*Ik) Jl -Kn+Mo1Np2Or 3Qs4Rt6Sv7Uw 8VxaWzbXAcZB e#Df!Eg %FiH j*Ik) Jm-Kn+Mo1Nq2Or3Qs5R t6Sv7U w9VxaW zbYAcZBe#Df$Eg%FiHj(Ik) Jm-Ln+ Mo1Nq2 Pr3Qs5Ru6Sv7Uw9VyaWzbYAd ZBe#Df $Eh%Fi Hj(Il) Jm-Ln0Mo1Nq2Pr4Qs 5Ru6Tv 7Uw9Vy aXzbYAdZCe#Df$Eh%GiHj(I l) Km-L n0Mp1N q2Pr4Qt5Ru6Tv8Uw9VyaXzcY AdZCe!Dg$Eh% Gi*Hj(Il) Km+Ln0Mp1Oq2Pr4 Qp2Or3Qs5Rt6 Sv7Uw8VxaWzbYAcZBe#Df!Eg %FiHj*Ik) Jm -Ln+Mo1Nq2Or3Qs5Ru6Sv7Uw 9VxaWzbYAdZBe#Df$Eg%Fi H j(Ik) Jm-Ln0 Mo1Nq2P r3Qs5 Ru6Tv7Uw9Vya W zbYAdZCe#Df $Eh%Fi Hj(Il ) Jm-Ln0Mp1Nq 2Pr4Qs5Ru6Tv 8Uw9Vya XzbYA dZCe!Df$Eh%G iHj(Il) Km-L n0Mp1Oq2Pr4Q t5Ru6Tv8Ux9V ya XzcYAdZCe! Dg$Eh%Gi*Hk( Il) Km+Ln0Mp1 Oq 3Pr4Qt5Su6 Tv8Ux9Wy aXzc YBdZCe! Dg$Fh %Gi*Hk(Jl) Km +Lo0Mp1Oq3Ps 4Qt5Su7Tv8Ux 9WybXzcYBaWz bYAdZBe#Df$E h%FiHj(Ik) J m -Ln0Mo1Nq2P r4Qs5Ru 6Tv7U w9VyaXzbYAdZ C e#Df$Eh%Gi Hj(Il) J m-Ln0 Mp1Nq2Pr4Qt5 R u6Tv8Uw9Vya XzcYAdZ Ce!Df $Eh%Gi*Hj(Il )Km-Ln0Mp1Oq 2Pr4Qt5Su6Tv 8Ux9VyaXzcYB dZ Ce! Dg$Eh%G i*Hk(Il)Km+L o0Mp1Oq3Pr4Q t5Su7T v8Ux9WyaXzcYBd #Ce !Dg$Fh%Gi*Hk (Jl) Km+Lo0Np 1Oq3Ps4Qt5Su 7Tw8Ux9WybXz cY Bd#Cf!Dg$F hGi*Hk(J l-K m+Lo0Np2Oq3P s4Rt5Su7Tw8V x9WybXAcY Bd# Cf! Eg$FhGj* Hk (Jl-Kn+Lo0Np2O r3Ps4Rt---------------------------------------------------------------最新资料推荐------------------------------------------------------6Su7Tw8VxaTv8Ux9VyaXzcYA dZCe!Dg$Eh%G i*Hj(Il) Km+Ln0Mp1Oq3Pr4Q t5Su6Tv8Ux9W yaXzcYBdZCe!Dg$Fh%Gi*Hk( Il) Km +Lo0Mp1 Oq3Ps4Qt5Su7Tv8Ux9WybXzc YBd#C7/ 7。
matlab最小二乘法实现三参数拟合

matlab最小二乘法实现三参数拟合
在MATLAB中,你可以使用`polyfit`函数来实现三参数的最小二乘拟合。
以下是一个示例,其中我们试图拟合一个三次多项式:
```matlab
% 创建一些示例数据
x = linspace(-10,10,100);
y = 3x.^3 + 2x.^2 + x + randn(size(x));
% 使用polyfit进行三参数拟合
p = polyfit(x, y, 3);
% 绘制原始数据和拟合曲线
plot(x, y, 'o');
hold on;
plot(x, polyval(p, x), '-');
hold off;
```
在这个例子中,`polyfit(x, y, 3)`函数试图找到一个三次多项式,该多项式能最小化所有`(xi, yi)`的平方和。
返回的`p`是一个包含三个系数的向量,这些系数对应于多项式的最高次项,即`p(1)x^3 + p(2)x^2 + p(3)x + p(4)`。
在这个例子中,我们没有提供第四个系数,所以它默认为0。
请注意,由于MATLAB中的`polyfit`函数默认使用最小二乘法进行拟合,因此我们不需要做任何额外的最小二乘法计算。