MATLAB仿真论文
(完整版)基于matlab的通信系统仿真毕业论文
创新实践报告报告题目:基于matlab的通信系统仿真学院名称:信息工程学院*名:***班级学号:***师:**二O一四年十月十五日目录一、引言 (3)二、仿真分析与测试 (4)2.1 随机信号的生成 (4)2.2信道编译码 (4)2.2.1 卷积码的原理 (4)2.2.2 译码原理 (5)2.3 调制与解调 (5)2.3.1 BPSK的调制原理 (5)2.3.2 BPSK解调原理 (6)2.3.3 QPSK调制与解调 (7)2.4信道 (8)2.4.1 加性高斯白噪声信道 (8)2.4.2 瑞利信道 (8)2.5多径合并 (8)2.5.1 MRC方式 (8)2.5.2 EGC方式 (9)2.6采样判决 (9)2.7理论值与仿真结果的对比 (9)三、系统仿真分析 (11)3.1有信道编码和无信道编码的的性能比较 (11)3.1.1信道编码的仿真 (11)3.1.2有信道编码和无信道编码的比较 (12)3.2 BPSK与QPSK调制方式对通信系统性能的比较 (13)3.2.1调制过程的仿真 (13)3.2.2不同调制方式的误码率分析 (14)3.3高斯信道和瑞利衰落信道下的比较 (15)3.3.1信道加噪仿真 (15)3.3.2不同信道下的误码分析 (15)3.4不同合并方式下的对比 (16)3.4.1 MRC不同信噪比下的误码分析 (16)3.4.2 EGC不同信噪比下的误码分析 (16)3.4.3 MRC、EGC分别在2根、4根天线下的对比 (17)3.5理论数据与仿真数据的区别 (17)四、设计小结 (19)参考文献 (20)一、引言现代社会发展要求通信系统功能越来越强,性能越来越高,构成越来越复杂;另一方面,要求通信系统技术研究和产品开发缩短周期,降低成本,提高水平。
这样尖锐对立的两个方面的要求,只有通过使用强大的计算机辅助分析设计技术和工具才能实现。
在这种迫切的需求之下,MATLAB应运而生。
毕业设计(论文)基于matlab的数字基带通信系统仿真
基于matlab的数字基带通信系统仿真1.课程设计的目的(1)增加对仿真软件的认识,学会对各种软件的操作和使用方法(2)加深理解数字基带通信系统的概念(3)初步掌握系统的设计方法,培养独立工作能力2.设计方案论证2.1数字基带传输系统在数字传输系统中,其传输的对象通常是二进制数字信号,它可能是来自计算机、电传打字机或其它数字设备的各种数字脉冲,也可能是来自数字终端的脉冲编码调制(PCM)信号。
这些二进制数字信号的频带范围通常从直流和低频开始,直到某一频率m f ,我们称这种信号为数字基带信号。
在某些有线信道中,特别是在传输距离不太远的情况下,数字基带信号可以不经过调制和解调过程在信道中直接传送,这种不使用调制和解调设备而直接传输基带信号的通信系统,我们称它为基带传输系统。
而在另外一些信道,特别是无线信道和光信道中,数字基带信号则必须经过调制过程,将信号频谱搬移到高频处才能在信道中传输,相应地,在接收端必须经过解调过程,才能恢复数字基带信号。
我们把这种包括了调制和解调过程的传输系统称为数字载波传输系统。
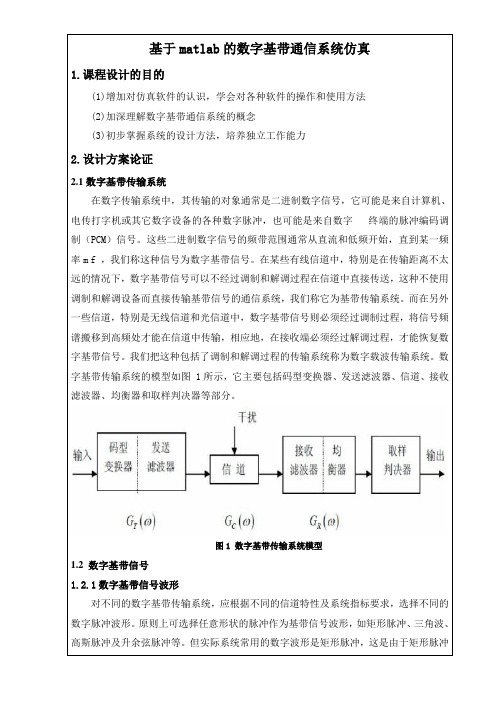
数字基带传输系统的模型如图 1所示,它主要包括码型变换器、发送滤波器、信道、接收滤波器、均衡器和取样判决器等部分。
图1 数字基带传输系统模型1.2 数字基带信号1.2.1数字基带信号波形对不同的数字基带传输系统,应根据不同的信道特性及系统指标要求,选择不同的数字脉冲波形。
原则上可选择任意形状的脉冲作为基带信号波形,如矩形脉冲、三角波、高斯脉冲及升余弦脉冲等。
但实际系统常用的数字波形是矩形脉冲,这是由于矩形脉冲纤数字传输系统中的线路传输码型。
此外,CMI 码和曼彻斯特码一样都是将一位二进制码用一组两位二进制码表示,因此称其为1B2B 码。
(5)4B/3T 码4B/3T 码是1B/1T 码的改进型它把4 个二进制码元变换为3个三进制码元。
显然,在相同信息速率的条件下,4B/3T 码的码元传输速率要比1B/1T 码的低,因而提高了系统的传输效率。
基于MATLAB的电力系统稳定性分析与仿真毕业论文
山东农业大学毕业论文基于MATLAB的电力系统稳定性分析与仿真装、丁院部机械与电子工程学院订专业班级电气3班线届次20**届_________学生姓名 _______________________学号 __________________________指导教师 ____________ 副教授二0**年六月六日摘要.................................................................................. .•...Abstract .. (II)1绪论................................................................................ 1...1.1课题背景................................................................. 1..1.2课题内容................................................................. 1..1.3课题意义................................................................. 1.. 2简单电力系统的静态稳定性及其仿真分析 (2)2.1电力系统静态稳定性简介 ...................................................... 2.2.2简单电力系统的静态稳定性仿真 (4)2.2.1Simulink模型构建及参数设置............................................ 4.2.2.2保持电势E q'=q。
'常数,励磁系统的综合放大系数为5.7857仿真分析 (7)2.3提高系统静态稳定性的措施 (9)2.3.1采用自动调节励磁装置 (9)2.3.2减小元件的电抗........................................................ 1.02.3.3提高线路标称电压等级 (10)2.3.4改善系统的结构和米用中间补偿设备 (11)3简单电力系统的暂态稳定性及其仿真分析 (11)3.1电力系统的暂态稳定性简介 (12)3.2 Simulink模型及仿真结果 ..................................................... 1.43.3提高系统暂态稳定性的措施 (18)3.3.1改变制动功率(发电机输出的电磁功率) .................................. 1 83.3.2改变原动功率(原动机输出的机械功率) .................................. 1 93.3.3系统失去稳定后的措施 (20)4总结与展望 (21)参考文献 (22)致谢................................................................................. 23.Contents Abstract.......................................................................................................................................... I I 1 In troduct ion . (1)1.1 Task background (1)1.2 Task contents (1)1.3 Task sig nifica nee (1)2 The static stability of power system and its simuli nk (2)2.1 In troduct ion of power system static stability (2)2.2 Simuli nk of power system static stability (4)2.2.1 Simuli nk model con struct ion and parameter setting (4)2.2.2 Keep ing voitage E q '=E q。
基于MATLAB控制系统的仿真与应用毕业设计论文

毕业设计(论文)题目基于MATLAB控制系统仿真应用研究毕业设计(论文)任务书I、毕业设计(论文)题目:基于MATLAB的控制系统仿真应用研究II、毕业设计(论文)使用的原始资料(数据)及设计技术要求:原始资料:(1)MATLAB语言。
(2)控制系统基本理论。
设计技术要求:(1)采用MATLAB仿真软件建立控制系统的仿真模型,进行计算机模拟,分析整个系统的构建,比较各种控制算法的性能。
(2)利用MATLAB完善的控制系统工具箱和强大的Simulink动态仿真环境,提供用方框图进行建模的图形接口,分别介绍离散和连续系统的MATLAB和Simulink仿真。
III、毕业设计(论文)工作内容及完成时间:第01~03周:查找课题相关资料,完成开题报告,英文资料翻译。
第04~11周:掌握MATLAB语言,熟悉控制系统基本理论。
第12~15周:完成对控制系统基本模块MATLAB仿真。
第16~18周:撰写毕业论文,答辩。
Ⅳ、主要参考资料:[1] 《MATLAB在控制系统中的应用》,张静编著,电子工业出版社。
[2]《MATLAB在控制系统应用与实例》,樊京,刘叔军编著,清华大学出版社。
[3]《智能控制》,刘金琨编著,电子工业出版社。
[4]《MATLAB控制系统仿真与设计》,赵景波编著,机械工业出版社。
[5]The Mathworks,Inc.MATLAB-Mathemmatics(Cer.7).2005.信息工程系电子信息工程专业类 0882052 班学生(签名):填写日期:年月日指导教师(签名):助理指导教师(并指出所负责的部分):信息工程系(室)主任(签名):学士学位论文原创性声明本人声明,所呈交的论文是本人在导师的指导下独立完成的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含法律意义上已属于他人的任何形式的研究成果,也不包含本人已用于其他学位申请的论文或成果。
对本文的研究成果作出重要贡献的个人和集体,均已在文中以明确方式表明。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
MATLAB论文【范本模板】

本科课程设计题目:连续时间信号傅里叶级数分析及MATLAB实现院系:信息工程学院姓名:周莎莎学号:1434140161专业:通信工程年级:2014 级指导教师:温金芳职称:讲师完成日期:2016年6月目录摘要 (I)A BSTRACT (II)绪论 01MATLAB简介 (1)1.1MATLAB语言功能 (1)1。
2MATLAB语言特点 (1)2 连续时间周期信号的傅里叶级数 (2)2。
1连续时间周期信号的分解 (2)2.1.1三角形式的傅里叶级数 (2)2。
1。
2指数形式的傅里叶级数 (3)2.2连续时间周期信号的傅里叶综合 (3)2.3吉布斯现象 (4)3连续时间周期信号的频谱分析 (6)3.1单边与双边频谱关系 (6)3。
2以单边幅度频谱为例,研究脉冲宽度与频谱的关系 (7)3.3以单边幅度频谱为例,研究脉冲周期与频谱的关系 (8)4 典型周期脉冲的频谱 (10)4.1周期方波脉冲频谱的MATLAB实现 (10)4。
1。
1周期方波脉冲双边频谱的MATLAB实现 (10)4.1.2 周期方波脉冲单边频谱的MATLAB实现 (12)4.2周期三角波脉冲频谱的MATLAB实现 (14)4。
2。
1 周期三角波双边频谱的MATLAB实现 (15)4。
2。
2 周期三角波单边频谱的MATLAB实现 (16)5小结 (18)致谢 (19)参考文献 (20)附录 (21)摘要MATLAB目前已发展成为由MATLAB 语言、MATLAB 工作环境、MATLAB 图形处理系统、MATLAB 数学函数库和MATLAB 应用程序接口五大部分组成的集数值计算、图形处理、程序开发为一体的功能强大的系统。
本次课程设计则在深入研究连续时间信号傅里叶级数分析理论知识的基础上,利用MATLAB强大的图形处理功能、符号运算功能以及数值计算功能,通过MATLAB编程进行图形功能仿真,从而实现连续时间周期信号频域分析的仿真波形,包括以下内容:用MATLAB实现周期信号的傅里叶级数分解与综合的波形;用MATLAB 实现周期信号的单边频谱及双边频谱的波形与分析;用MATLAB实现典型周期信号的频谱的波形。
MATLAB 结课小论文
基于MATLAB的控制系统分析摘要MATLAB具有强大的图形处理功能、符号运算功能和数值计算功能。
MATLAB 工具几乎涵盖了整个科学技术运算领域。
其中系统的仿真(Simulink)工具箱是从底层开发的一个完整的仿真环境和图形界面。
在这个环境中,用户可以完成面向框图系统仿真的全部过程,并且更加直观和准确地达到仿真的目标。
此次,以数字电路中的时序逻辑电路为线索来学习Simulink,了解了许多数字电路中常用模块的使用方法.时序电路中除具有逻辑运算功能的组合电路外,还必须有能够记忆电路状态的存储单元或延迟单元,这些存储或延迟单元主要由本次设计所用到的触发器来实现。
D触发器、RS触发器、JK触发器等这些时序逻辑电路中常用的器件在Simulink中都有相应的仿真模块,除此之外,用户还可以自行设计封装模块来一步一步完成更大的电路系统,实现更强大的逻辑功能。
关键词:MATLAB、Simulink、时序电路1 Matlab内容简介MATLAB拥有了更丰富的数据类型和结构,更好的面向对象的快速精美的图形界面,更多的数学和数据分析资源,MATLAB工具几乎涵盖了整个科学技术运算领域。
在大部分大学里,应用代数、数理统计、自动控制、数字信号处理、模拟与数字通信、时间序列分析、动态系统仿真等课程的教材都把MATLAB作为必不可少的内容。
在国际学术界,MATLAB被确认为最准确可靠的科学计算标准软件,在许多国际一流的学术刊物上都可以看到MATLAB在各个领域里的应用。
2系统的稳定性分析稳定是控制系统的重要性能,也是系统能够正常运行的首要条件。
在分析控制系统时,首先遇到的问题就是系统的稳定性。
对线性系统来说,如果一个系统的所有几点都位于左半s 平面,则该系统是稳定的。
对于离散系统来说,如果一个系统的全部极点都在单位圆内,则该系统可以被认为是稳定的。
由此可见,线性系统的稳定性完全取决于系统的极点在根平面上的位置。
判断一个线性系统稳定性的一种最有效的方法是直接求出系统所用的极点,然后根据极点的分布情况来确定系统的稳定性。
基于matlab的智能PID控制器设计和仿真毕业设计论文
基于MATLAB的智能PID控制器设计与仿真摘要在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
传统的PID控制器原理十分简单,即按比例、积分、微分分别控制的控制器,但是他的核心也是他的难点就是三个参数(比例系数Kp、积分系数Ki、微分系数Kd)的整定。
参数整定的合适,那么该控制器将凭借结构简单、鲁棒性好的优点出色的完成控制任务,反之则达不到人们所期望的控制效果。
人工神经网络模拟人脑的结构和功能而形成的信息处理系统,是一门十分前沿高度综合的交叉学科,并广泛应用于工程领域。
神经网络控制是把自动控制理论同他模仿人脑工作机制的数学模型结合起来,并拥有自学习能力,能够从输入—输出数据中总结规律,智能的处理数据。
该技术目前被广泛应用于处理时变、非线性复杂的系统,并卓有成效。
关键词自适应PID控制算法,PID控制器,神经网络Design and simulation of Intelligent PID Controllerbased on MATLABAbstractPID controller ,the control method which is developed on the basis of classical control theory, is widely used in industrial production.The Principle of traditional PID controller is very simple, which contains of the proportion, integral, differential three component, but its core task and difficulties is three parameter tuning(proportional coefficient Kp, integral coefficient Ki and differential coefficient KD).If the parameter setting is suitable, the controller can accomplish the control task with the advantages of simple structure and good robustness;but on the contrary, it can not reach the desired control effect which we what.Artificial neural network , the formation of the information processing system which simulate the structure and function of the human brain , is a very high degree of integration of the intersection of disciplines, and widely used in the field of engineering. Neural network control ,combining automatic control theory and the imitate mathematical model of the working mechanism of human brain , has self-learning ability, and can summarize the law of the input-output data , dealing with data intelligently .This technique has been widely used in the process of time-varying, nonlinear and complex system, and it is very effective.Key W ord:Adaptive PID control algorithm,PID controller,Neural network目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题研究背景及意义 (1)第二章 PID控制器 (2)2.1 PID控制原理 (2)2.2常规PID控制器的算法理论 (3)2.2.1 模拟PI D控制器 (3)2.2.2 数字P I D控制算法 (3)2.2.3常规PID控制的局限 (5)2.2.4 改进型PID控制器 (5)第三章人工神经网络 (8)3.1 人工神经网络的原理 (8)3.2神经网络PID控制器 (8)3.2.1神经元PID控制器 (8)3.2.2 单神经元自适PID应控制器 (9)3.3 BP神经网络参数自学习的PID控制器 (12)第四章MATAB仿真 (16)4.1 仿真过程 (16)第五章结论与展望 (24)致谢 (25)参考文献 (25)华东交通大学毕业设计(论文)第一章绪论1.1 课题研究背景及意义在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
毕业设计论文基于matlab的步进电机转速控制仿真(论文)

毕业设计论文基于matlab的步进电机转速控制仿真(论文)摘要一般电动机都是连续旋转而步进电动却是一步一步转动的故叫步进电动机每输入一个冲信号该电动机就转过一定的角度有的步进电动机可以直接输出线位移称为直线电动机因此步进电动机是一种把脉冲变为角度位移或直线位移的执行元件数字控制系统的发展步进电动机的应用逐渐扩大仿真环境下建立了步进电机模型不仅仿真结果与实物仿真一致而且其仿真方法简单仿真时间大大缩短是一种理想的步进电机仿真研究方法关键词仿真ABSTRACTGeneral Motors is a continuous rotation while the step is electric rotating step by step so called stepper motors Each input of a red signal the motor will turn a certain angle some stepper motors can be directly output line displacement known as the linear motor Therefore the stepper motor is a pulse into the point of displacement or linear displacement of the implementation of the components With the development of digital control systems stepper motor application gradually expanding Although the stepper motor has been widely used but the stepper motor does not like a normal DC motor AC motor used in the routine It must be double-ring pulsesignal drive circuit composed of control before useUsed in the product forming the beginning of Shang Ruoli simulation software circuit simulation is an important study of its Indispensable want of means to control program simulation environment for debugging not only without actually hardware better Bufen meet the engineering requirements Matlab language is a science and engineering calculations for high-level language which combines scientific computing automatic control signal processing neural networks image processing and other functions into one is an advanced mathematical analysis and computation software can be used as dynamic Modeling and Simulation MATLAB-Simulink simulation environment based on the establishment of a stepping motor under the model simulation results not only consistent with the physical simulation and the simulation method is simple the simulation time is shortened it is an ideal stepping motor simulation methodsKEY WORDS Stepper motor matlab simulation前言步进电机问世以后很快确定了自己的应用场合为开环高分辨率的定位系统工业应用发展到今已有约30年的历史目前还没有更适合的取代它的产品而且已经发展成为除直流和交流电机外的第三大类电动机产品但毕竟发展历史不长人们从应用的角度看仍有不成熟的感觉步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件在非超载的情况下电机的转速停止的位置只取决于脉冲信号的频率和脉冲数而不受负载变化的影响即给电机加一个脉冲信号电机则转过一个步距角这一线性关系的存在加上步进电机只有周期性的误差而无累积误差等特点使得在速度位置等控制领域用步进电机来控制变的非常的简单摘要 1ABSTRACT 2前言 3第1章引言 511步进电机概述 512系统仿真技术概述713仿真软件的发展状况与应用 7第2章 MATLAB概要821 MATLAB概述822 概述10第3章步进电机基本原理 1131 典型结构和工作原理1132 旋转通电方式1233 小步距角步进电机1434 其他型式的步进电动机16com步进电动机1635 步进电机的控制方式21com机的开环控制21com 步进电机的闭环控制22第4章混合式步进数学模型及其建模2341 混合式步进数学模型2342 混合式步进电机的建模 27第5章步进电动机的驱动电源3051混合式步进电机的绕组通电方式305.2 两相双四拍环形分配器32第6章步进电机控制方式仿真结果3561 PID控制器 35comID控制器35参考文献38致谢40第1章引言步进电机最早是在1920年代由英国人所开发1950年代后期晶体管的发明也逐渐应用在步进电机上对于数字化的控制变得更为容易往后经过不断改良使得今日步进电机已广泛运用在需要高定位精度高分解能高响应性信赖性等灵活控制性高的机械系统中在生产过程中要求自动化省人力效率高的机器中我们很容易发现步进电机的踪迹尤其以重视速度位置控制需要精确操作各项指令动作的灵活控制性场合步进电机用得最多11步进电机概述步进电机依其构造上的差异可分为三大类可变磁阻式VR型转子以软铁加工成齿状当定子线圈不加激磁电压时保持转矩为零故其转子惯性小响应性佳但其容许负荷惯性并不大其步进角通常为15°永久磁铁式PM型转子由永久磁铁构成其磁化方向为辐向磁化无激磁时有保持转矩依转子材质区分其步进角有45°90°及75°1125°15°18°等几种混和式HB型转子由轴向磁化的磁铁制成磁极做成复极的形式其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点精确度高转矩大步进角度小目前市场上所使用的工业用步进电机以混和式HB型最为普遍步进电机的特征步进电机最大特征即是能够简单的做到高精度的定位控制以5相步进电机为例其定位基本单位分辨率为072°全步级036°半步级是非常小的停止定位精度误差皆在±3分±005°以内且无累计误差故可达到高精度的定位控制步进电机的定位精度是取决于电机本身的机械加工精度置及速度控制步进电机在输入脉冲信号时可以依输入的脉冲数做固定角的回转进而得到灵活的角度控制位置控制并可得到与该脉冲信号周波数频率成比例的回转速度具定位保持力步进电机在停止状态下无脉波信号输入时仍具有激磁保持力故即使不依靠机械式的刹车也能做到停止位置的保持动作灵敏步进电机因为加速性能优越所以可做到瞬时起动停止正反转之快速频繁的定位动作开回路控制不必依赖传感器定位步进电机的控制系统构成简单不需要速度感应器ENCODER转速发电机及位置传感器SENSOR就能以输入的脉波做速度及位置的控制也因其属开回路控制故最适合于短距离高频度高精度之定位控制的场合下使用中低速时具备高转矩步进电机在中低速时具有较大的转矩故能够较同级伺服电机提供更大的扭力输出高信赖性使用步进电机装置与使用离合器减速机及极限开关等其它装置相较步进电机的故障及误动作少所以在检查及保养时也较简单容易小型高功率步进电机体积小扭力大尽管于狭窄的空间内仍可顺利做安装并提供高转矩输出12系统仿真技术概述系统是由客观世界中实体与实体间的相互作用和相互依赖关系构成的具有某种特定功能的有机整体系统的分类方法是多种多样的习惯上依照其应用范围可以将系统分为工程系统和非工程系统工程系统的含义是指由相互关联部件组成的一个整体以实现特定的目的例如电机驱动自动控制系统是由执行部件功率转换部件检测部件所组成用它来完成电机的转速位置和其他参数控制的某个特定目标非工程系统的定义范围很广大至宇宙小至原子只要存在着相互关联相互制约的关系形成一个整体实现某种目的的均可以认为是系统如果想定量地研究系统地行为可以将其本身的特性及内部的相互关系抽象出来构造出系统的模型系统的模型分为物理模型和数学模型由于计算机技术的迅速发展和广泛应用数学模型的应用越来越普遍系统的数学模型是描述系统动态特性的数学表达式用来表示系统运动过程中的各个量的关系是分析设计系统的依据从它所描述系统的运动性质和数学工具来分又可以分为连续系统离散时间系统离散事件系统混杂系统等还可细分为线性非线性定常时变集中参数分布参数确定性随机等子类系统仿真是根据被研究的真实系统的数学模型研究系统性能的一门学科现在尤指利用计算机去研究数学模型行为的方法计算机仿真的基本内容包括系统模型算法计算机程序设计与仿真结果显示分析与验证等环节13仿真软件的发展状况与应用早期的计算机仿真技术大致经历了几个阶段20世纪40年代模拟计算机仿真50年代初数字仿真60年代早期仿真语言的出现等80年代出现的面向对象仿真技术为系统仿真方法注入了活力我国早在50年代就开始研究仿真技术了当时主要用于国防领域以模拟计算机的仿真为主70年代初开始应用数字计算机进行仿真[4]随着数字计算机的普及近20年以来国际国内出现了许多专门用于计算机数字仿真的仿真语言与工具如CSMPACSL SIMNOM MATLAB MatrixSystem Build CSMP-C等第2章 MATLAB概要21 MATLAB概述MATLAB是国际上仿真领域最权威最实用的计算机工具它是MathWork公司于1982年推出的一套高性能的数值计算和可视化数学软件被誉为巨人肩上的工具MATLAB是一种应用于计算技术的高性能语言它将计算可视化和编程结合在一个易于使用的环境中此而将问题解决方案表示成我们所熟悉的数学符号其典型的使用包括数学计算运算法则的推导模型仿真和还原数据分析采集及可视化科技和工程制图开发软件包括图形用户界面的建立MATLAB是一个交互式系统它的基本数据元素是矩阵且不需要指定大小通过它可以解决很多技术计算问题尤其是带有矩阵和矢量公式推导的问题有时还能写入非交互式语言如C和Fortran等MATLAB的名字象征着矩阵库它最初被开发出来是为了方便访问由LINPACK 和EISPAK开发的矩阵软件其代表着艺术级的矩阵计算软件MATLAB在拥有很多用户的同时经历了许多年的发展时期在大学环境中它作为介绍性的教育工具以及在进阶课程中应用于数学工程和科学在工业上它是用于高生产力研究开发分析的工具之一MATLAB的一系列的特殊应用解决方案称为工具箱toolboxes作为用户不可缺少的工具箱它可以使你学习和使用专门技术工具箱包含着M-file集它使MATLAB可延展至解决特殊类的问题在工具箱的范围内可以解决单个过程控制系统神经网络模糊逻辑小波仿真及其他很多问题经过几十年的完善和扩充它已发展成线形代数课程的标准工具在美国MATLAB是大学生和研究生必修的课程之一美国许多大学的实验室都安装有MATLAB供学习和研究之用它集数值分析矩阵运算信号处理和图形显示于一体构成了一个方便的界面友好的用户环境其包含的SIMULINK是用于在MATLAB下建立系统框图和仿真环境的组件其包含有大量的模块集可以很方便的调取各种模块来搭建所构想的试验平台同时SIMULINK还提供时域和频域分析工具能够直接绘制系统的Bode图和Nyquist图MATLAB系统可分为五个部分MATLAB语言这是一种高级矩阵语言其有着控制流程状态功能数据结构输入输出及面向对象编程的特性它既有小型编程的功能快速建立小型可弃程序又有大型编程的功能开发一个完整的大型复杂应用程序MATLAB的工作环境这是一套工具和设备方便用户和编程者使用MATLAB它包含有在你的工作空间进行管理变量及输入和采集数据的设备同时也有开发管理调试 profiling M-files MATLABs applications Bessel功能和快速傅立叶变换MATLAB应用程序编程界面这是一个允许你在MATLAB界面下编写C和Fortran程序的库它方便从MATLAB中调用例程即动态链接使MATLAB成为一个计算器用于读写MAT-files22 概述是用于仿真建模及分析动态系统的一组程序包它支持线形和非线性系统能在连续时间离散时间或两者的复合情况下建模系统也能采用复合速率也就是用不同的部分用不同的速率来采样和更新提供一个图形化用户界面用于建模用鼠标拖拉块状图表即可完成建模在此界面下能像用铅笔在纸上一样画模型相对于以前的仿真需要用语言和程序来表明不同的方程式而言有了极大的进步拥有全面的库如接收器信号源线形及非线形组块和连接器同时也能自己定义和建立自己的块模块有等级之分因此可以由顶层往下的步骤也可以选择从底层往上建模可以在高层上统观系统然后双击模块来观看下一层的模型细节这种途径可以深入了解模型的组织和模块之间的相互作用在定义了一个模型后就可以进行仿真了用综合方法的选择或用的菜单或MATLAB命令窗口的命令键入菜单的独特性便于交互式工作当然命令行对于运行仿真的分支是很有用的使用scopes或其他显示模块就可在模拟运行时看到模拟结果进一步可以改变其中的参数同时可以立即看到结果的改变仿真结果可以放到MATLAB工作空间来做后处理和可视化模型分析工具包括线性化工具和微调工具它们可以从MATLAB命令行直接访问同时还有很多MATLAB的toolboxes中的工具因为MATLAB和是一体的所以可以仿真分析修改模型在两者中的任一环境中进行小结综上所述利用MATLAB来仿真步进电机的运行情况可以帮助研究者更好更方便的了解步进电机的特性以便进一步改善其效率第3章步进电机基本原理31 典型结构和工作原理一般电动机都是连续旋转而步进电动却是一步一步转动的故叫步进电动机每输入一个冲信号该电动机就转过一定的角度有的步进电动机可以直接输出线位移称为直线电动机因此步进电动机是一种把脉冲变为角度位移或直线位移的执行元件步进电动机的转子为多极分布定子上嵌有多相星形连接的控制绕组由专门电源输入电脉冲信号每输入一个脉冲信号步进电动机的转子就前进一步由于输入的是脉冲信号输出的角位移是断续的所以又称为脉冲电动机随着数字控制系统的发展步进电动机的应用将逐渐扩大步进电动机的种类很多按励磁可分为反应式永磁式和感应子式按相数分则可分为单相两相和多相三种其中反应式步进电机用得比较普遍结构也比较简单所以以反应式步进电机为例介绍步进电机的工作原理反应式步进电动机的工作原理与反应式同步电机一样也是利用凸极转子横轴磁阻与直轴磁阻之差所引起的反应转矩而转动的为了便于理解先以一个简单的三相步进电动机为例图 3-1是反应式步进电动机结构示意图它的定子具有均匀分布的六个磁极磁极上绕有绕组两个相对的磁极组成一组联法如图所示图 3-1 三相反应式步进电动机的结构电机转子均匀分布着很多小齿定子齿有三个励磁绕阻其几何轴线依次分别与转子齿轴线错开 013て23て相邻两转子齿轴线间的距离为齿距以て表示即A 与齿1相对齐B与齿2向右错开13てC与齿3向右错开23てA与齿5相对齐A 就是A齿5就是齿132 旋转通电方式图 3-2 三相单三拍运行转子位置步进电动机的工作原理其实就是电磁铁的工作原理定子由若干相控制绕组构成每相依次通入直流电磁通具有力图沿磁阻最小路径通过的特点如A相通电BC相不通电时由于磁场作用齿1和齿3与A A对齐如图3-2a所示如B相通电AC相不通电时齿2应与B对齐此时转子向右移过13て此时齿3与C偏移为13て齿4与A偏移て-13て 23て如图3-2b所示如C相通电AB相不通电齿3应与C对齐此时转子又向右移过13て此时齿4与A偏移为13て对齐如图3-2c所示如A相通电BC相不通电齿4与A对齐转子又向右移过13て这样经过ABCA 分别通电状态齿4即齿1前一齿移到A相电机转子向右转过一个齿距如果不断地按A-B-C-A通电电机就每步每脉冲13て向右旋转如按A-C-B-A通电电机就反转这种按A-B-C-A方式运行的称为三相单三拍运行所谓三相是指步进电动机具有三相定子绕组单是指每次只有一相绕组通电三拍指三次换接为一个循环第四次换接重复第一次情况除了这种运行方式外三相步进电动机还可以以三相六拍和三相双三拍运行三相六拍运行的供电方式是A-AB-B-BC-C-CA-这时每一循环换接6次总共有6种通电状态这6种通电状态中有时只有一相绕组通电如A相有时有两相绕组同时通电如A相和B相图3-3表示这种方式对控制绕组供电时转子位置和磁通分布的图形开始时先单独接通A相这时与单三拍的情况相同转子齿1和3的轴线与定子极轴对齐如图3-3a所示当A和B两相同时通电时转子稳定位置将会停留在AB两定子磁极对称的中心位置上依此类推如果下面继续按照BC-C-CA-A的顺序使绕组换接那末步进电动机就不断按顺时针方向旋转当顺序顺序改为A-AC-C-CB-B-BA-A时步进电动机就反响即按逆时针方向旋转图 3-3 三相六拍运行aA相通电bAB相通电cB相通电dBC相通电可见单双六拍运行时步距角为15°比三拍通电方式时减小一半因此同一台步进电动机采用不同的通电方式可以有不同的拍数对应运行时的步距角也不同此外六拍运行方式每一拍也总有一相控制绕组持续通电也具有电磁阻尼作用电机工作也比较平稳33 小步距角步进电机以上这种结构形式的反应式步进电动机它的步距角较大常常满足不了系统精度的要求所以大多数采用如图3-4所示的定子磁极上带有小齿转子齿数很多的反应式结构其步距角可以做得很小下面进一步说明它的工作原理图3-4所示的是最常见的一种小步距角的三相反应式步进电动机定子每个图3-4 三相反应式步进电动机的结构极面上有5个齿转子上均匀分布40个齿定转子的齿宽和齿距都相同当A相控制绕组通电时转子受到反应转矩的作用使转子齿的轴线和定子AA′极下齿的轴线对齐因转子上共有40个齿其齿距角为定子每个极距所占的齿数为不是整数如图3-5所示因此当定子A相极下定转子齿对齐时定子B相极和C相极下的齿和转子齿依次有 13 齿距的错位即3°同样当A相断电B相控制绕组通电时反应转矩的作用下子按逆时针方向转过3°转子齿的轴线和定子B相极下齿的轴线对齐这时定子C相极和A相极下的齿和转子齿又依次错开 13 齿距依次类推若继续按单三拍的顺序通电转子就按逆时针方向一步一步地转动步距角为3°当然改变通电顺序即按A-C-B-A 电机按顺时针方向反转图3-5转子展开图 A相绕组通电若采用三相单双六拍的通电方式运行时和前面分析的道理完全一样步距角也减小一半为15°通过以上分析可知转子的齿数不能任意选取因为在同一相的几个磁极下定转子齿应同时对齐或同时错开才能使几个磁极的作用相加产生足够的反应转矩所以转子齿数应是定子磁极的偶数倍另外在不同相的磁极下定转子相对位置应依次错开 1m 齿距这样才能在连续改变通电状态下获得连续不断的运动否则当某一相控制绕组通电时转子齿都将处于磁路的磁阻最小的位置上各相绕组轮流通电时转子将一直处于静止状态电动机不能正常运行为此要求两相邻相磁极轴线之间转子的齿数应为整数加或减 1m 即3-1式中K 为正整数Zr 为转子的齿数2p 为一相绕组通电时在圆周上形成的磁极数图 3-5定转子展开图A相绕组通电如果以 N 表示步进电动机运行的拍数则转子经过 N 步将转过一个齿距每转一圈即360°机械角需要走NZr 步步距角为3-2N Cm式中C 为通电状态系数当采用单拍或双拍方式时C 1而采用单双拍方式时C 2由此可见增加拍数和转子的齿数可以减小步距角有利于提高控制精度增加电机的相数可以增加拍数也可以减小步距角但相数越多电源及电机的结构越复杂造价也越高反应式步进电动机一般做到六相个别的也有八相或更多相增加转子的齿数是减小步进电动机步距角的一个有效途径目前所使用的步进电动机转子的齿数一般很多对相同相数的步进电动机既可采用单拍方式也可采用单双拍方式所以同一台电机可有两个步距角如 3°15° 15°075° 12°06°等当通电脉冲的频率为时由于转子每经过 NZr 个脉冲旋转一周故步进电动机每分钟的转速为3-3式中的单位为 HZ可见反应式步进电动机的转速与拍数 N转子齿数 Zr 及脉冲的频率有关当转子齿数一定转速与输入脉冲的频率成正比改变脉冲的频率可以改变电机的转速34 其他型式的步进电动机com步进电动机图3-6是永磁式步进电动机的结构原理图定子为凸极式装有两相或多相绕组转子为凸极式星形磁钢其极对数与定子每相绕组的极对数相同图中定子为两相集中绕组AO BO 每相为两对极所以转子也是两对极即 p 2当定子绕组按 A-B –A - –B -A 的次序轮流通电时转子将按顺时针方向每次转过45°即步距角为45°永磁式步进电动机的步距角3-4用电弧度表示则有3-5式中p 为转子极对数图 3-6 永磁式步进电机由上可知永磁式步进电机要求电源供给正负脉冲否则不能运行这就使电源的线路复杂化了这个问题可通过在同一相的极上绕两套绕向相反的绕组电源只供给正脉冲的方法来解决这样做虽然增加了用铜量和电机尺寸但却简化了对电源的要求此外还有两相双四拍通电方式即AB-B –A - –A –B - –B A-AB永磁式步进电动机的特点是①大步距角例如②启动和运行频率较低通常为几十到几百赫兹但转速不一定低但它所需的③控制功率较小效率高④在断电情况下具有定位转矩⑤有强的内阻力矩主要用于新型自动化仪表com步进电动机混合式步进电动机也称为感应子式步进电动机这是一种十分流行的步进电动机它的定子铁心与反应式步进电动机相同也是两相集中绕组每项为两极对按A-B –A - –B -A次序轮流通以正负脉冲转子的结构与永久磁钢的电磁减速式同步电动机相同它既有反应式步进电动机小步距角的特点又有永磁式步进电动机的高效率绕组电感比较小的特点常常也作为低速同步电动机运行一两相混合式步进电动机的结构图3-7为两相混合式步进电动机的轴向剖视图定子的结构与反应式步进电动机基本相同沿着圆周有若干个凸出的磁极极面上有小齿极身上有控制绕组控制绕组的接线如图3-8所示转子由环形磁钢和两段铁芯组成环形磁钢在转子中部轴向充磁两段铁芯分别装在磁钢的两端转子铁芯上也有小齿两段铁芯上的小齿相互错开半个齿距定转子的齿距和齿宽相同齿数的配合与单段反应式步进电动机相同图3-7混合式步进电动机轴向剖视图图3-8混合式步进电动机轴向剖视图二两相混合式步进电动机的工作原理混合式步进电动机作用在气隙上的磁动势有两个一个是由永久磁钢产生的磁动势另一个是由控制绕组产生的磁动势这两个磁动势有时是相加的有时是相减的视控制绕组中电流方向而定这种步进电动机的特点是混入了永久磁钢的磁动势故称为混合式步进电动机1零电流时工作状态各相控制绕组中没有电流通过这时气隙中的磁动势仅由永久磁钢的磁动势决定如果电机的结构完全对称各个定子磁极下的气隙磁动势将完全相等电动机无电磁转矩因为永磁磁路是轴向的从转子B端到定子的B端轴向到定子的A端转子的A端经磁钢闭合在这个磁路上总的磁导与转子位置无关这一方面由于转子不论处于什么位置每一端的不同极下磁导有的大有的小但总和不变另一方面由于两段转子的齿错开了半个齿距所以即使在一个极的范围内看当B端磁导增大时A端必然减小也使总磁导在转子位置不同时保持不变。
电力电子电路典型环节的MATLAB仿真毕业设计论文

可修改可编辑教学单位电子电气工程系学生学号200895014075编号DQ2012DQ075 本科毕业设计题目学生姓名专业名称指导教师2010年月日电力电子电路典型环节的MATLAB仿真摘要:本文主要研究了电力电子电路典型环节的MATLAB仿真,首先介绍了MATLAB软件及其图形仿真界面Simulink的基础应用知识,然后介绍了用于电力电子仿真的SimPowerSystems中的各种模块库,完成了对整流电路、斩波电路典型环节的建模与仿真,并且给出了仿真结果波形。
通过MATLAB/SIMULINK软件来建立各电路的仿真模型,并且对各个模块和系统内部的参数进行设置,例如仿真算法、电子器件的选择和电源幅值和频率等,最终实现电力电子系统在MATLAB中的仿真。
仿真结果和理论分析结果相一致,验证了仿真建模的有效性和正确性。
最后,本文对研究成果进行了总结,并提出了进一步改进建议。
关键词:Matlab/Simulink,仿真,整流电路,斩波电路Abstract:This paper mainly studies the MATLAB simulation of the typical session to the power electronic circuit, This article first introduces the MATLAB software and the application of knowledge based on graphical interface Simulink simulation, and then introduced the various modules of SimPowerSystems library for the power electronic simulation, also completed Modeling and Simulation to the typical session of rectifier circuit and Chopper circuit, and show the results of the simulation waveform.Established various electric circuits through MATLAB/SIMULINK software the simulation model, and set the establishment to each module and the interior parameter of system, for example simulation algorithm, electronic device choice and electrical source peak-to-peak value and frequency and so on, finally realized simulation that the electric power electronics alternating-current circuit in MATLAB. Simulation result and theoretical analysis result consistent, has confirmed the simulation modelling validity and the accuracy.Finally, this paper summarizes the research results and makes suggestions for further improvement.Keywords:Matlab/Simulink , Simulation, Rectifier circuit, Choppercircuit目录第1章概述 (5)1.1国内外研究概况 (5)1.2本课题的研究内容 (5)1.3本课题的研究目的与意义 (6)第2章MATLAB/SIMULIK基础知识 (7)2.1MATLAB介绍 (7)2.1.1 MATLAB主要组成部分 (7)2.1.2 MATLAB的系统开发环 (8)2.2SIMULINK仿真基础 (9)2.2.1 SIMULINK启动 (10)2.2.2 SIMULINK的模块库介绍 (11)2.2.3 电力系统模块库的介绍 (12)2.2.4 SIMULINK的仿真步骤 (13)第3章整流电路的SIMULINK仿真设计 (15)3.1单相桥式整流电路的仿真 (15)3.1.1 单相桥式全控整流电路的工作原理 (15)3.1.2 建立仿真模型 (15)3.1.3 设置模型参数 (17)3.1.4 模型仿真 (18)3.2三相桥式整流电路的仿真 (21)3.2.1 三相桥式全控整流电路的工作原理 (21)3.2.2 建立仿真模型 (22)3.2.3 设置模型参数 (23)第4章斩波电路的SIMULINK仿真设计 (26)4.1降压斩波电路的仿真 (26)4.1.1 降压变换器的工作原理 (26)4.1.2 建立仿真模型 (27)4.1.3 设置模型参数 (28)4.1.4 模型仿真 (28)4.2升压斩波电路的仿真 (30)4.2.1 升压变换器的工作原理 (30)4.2.2 建立仿真模型 (30)4.2.3 设置模型参数 (31)4.2.4 模型仿真 (32)第5章仿真调试 (34)5.1模型仿真应注意的问题 (34)5.1.1 模型建立和仿真参数的设置 (34)5.1.2 仿真运行和观测仿真结果 (35)结论 (37)参考文献 (38)致谢 (40)第1章概述1.1 国内外研究概况电力电子技术综合了微电子、电路、自动控制等多学科知识,是电能变换与控制的核心技术,在工业、能源、交通、国防等各个领域发挥着越来越重要的作用。
基于matlab的步进电机转速控制仿真(论文)
摘要一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
随着数字控制系统的发展,步进电动机的应用逐渐扩大。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
在产品成型之初尚若利用仿真软件设计电路,仿真是对其进行研究的一个重要的不可缺少的手段,在仿真环境中进行控制程序的调试,这不仅不需要实际的硬件设备,更能部分满足工程需求。
MATLAB 语言是一种面向科学工程计算的高级语言,它集科学计算、自动控制、信号处理、神经网络、图像处理等功能于一体,是一种高级的数学分析与运算软件,可用作动态系统的建模和仿真。
基于MATLAB的simulink仿真环境下建立了步进电机模型,不仅仿真结果与实物仿真一致,而且其仿真方法简单,仿真时间大大缩短,是一种理想的步进电机仿真研究方法。
关键词:步进电机,matlab,simulink,仿真ABSTRACTGeneral Motors is a continuous rotation, while the step is electric rotating step by step, so called stepper motors. Each input of a red signal, the motor will turn a certain angle (some stepper motors can be directly output line displacement, known as the linear motor). Therefore, the stepper motor is a pulse into the point of displacement (or linear displacement) of the implementation of the components. With the development of digital control systems, stepper motor application gradually expanding. Although the stepper motor has been widely used, but the stepper motor does not like a normal DC motor, AC motor used in the routine. It must be double-ring pulse signal drive circuit composed of control before use.Used in the product forming the beginning of Shang Ruoli simulation software circuit simulation is an important study of itsIndispensable want of means to control program simulation environment for debugging, not only without actually hardware, better Bufen meet the engineering requirements. Matlab language is a science and engineering calculations for high-level language, which combines scientific computing, automatic control, signal processing, neural networks, image processing and other functions into one, is an advanced mathematical analysis and computation software can be used as dynamic Modeling and Simulation. MATLAB-Simulink simulation environment based on the establishment of a stepping motor under the model, simulation results not only consistent with the physical simulation, and the simulation method is simple, the simulation time is shortened, it is an ideal stepping motor simulation methods.KEY WORDS:Stepper motor, matlab, simulink, simulation前言步进电机问世以后,很快确定了自己的应用场合为开环高分辨率的定位系统,工业应用发展到今已有约30年的历史,目前还没有更适合的取代它的产品,而且已经发展成为除直流和交流电机外的第三大类电动机产品,但毕竟发展历史不长,人们从应用的角度看仍有不成熟的感觉。
matlab仿真毕业设计论文

matlab仿真毕业设计论文Matlab仿真毕业设计论文毕业设计是大学生在校期间最重要的任务之一,它旨在培养学生的综合能力和解决实际问题的能力。
在科技发展迅猛的当今社会,Matlab仿真成为了毕业设计中不可或缺的一部分。
本文将探讨Matlab仿真在毕业设计论文中的应用,并分析其优势和局限性。
一、Matlab仿真的优势1. 灵活性:Matlab是一种高级编程语言,具有强大的数值计算和数据处理能力。
它提供了丰富的工具箱和函数,可以满足各种不同领域的仿真需求。
无论是电子电路、通信系统还是控制系统,Matlab都能提供相应的解决方案。
2. 可视化:Matlab具有出色的可视化能力,可以将仿真结果以图表、曲线等形式直观地展示出来。
这对于毕业设计论文的撰写非常有帮助,可以更清晰地呈现设计方案的效果和性能。
3. 快速迭代:Matlab具有快速迭代的特点,可以快速修改和调试代码。
这对于毕业设计论文的实验部分非常重要,可以在较短的时间内完成多次仿真实验,得到更准确的结果。
4. 资源丰富:Matlab拥有庞大的用户群体和活跃的社区,可以从中获取各种开源代码和工具。
这为毕业设计论文的实现提供了便利,可以借鉴和参考他人的成果,提高设计的效率和质量。
二、Matlab仿真的应用案例1. 电子电路设计:在电子工程领域的毕业设计中,Matlab可以用于模拟和分析各种电路,如放大器、滤波器等。
通过Matlab仿真,可以评估电路的性能指标,优化设计参数,实现电路的精确控制。
2. 通信系统设计:在通信工程领域的毕业设计中,Matlab可以用于建立通信系统的仿真模型,评估系统的传输性能和误码率。
通过Matlab仿真,可以研究和改进各种调制解调技术,提高通信系统的可靠性和效率。
3. 控制系统设计:在自动化工程领域的毕业设计中,Matlab可以用于建立控制系统的仿真模型,分析系统的稳定性和响应速度。
通过Matlab仿真,可以设计和优化各种控制算法,实现对系统的准确控制。
神经网络故障的MATLAB仿真毕业设计论文

毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文摘要:本论文基于MATLAB控制系统仿真平台,通过对其中一控制系统的仿真分析,运用MATLAB软件实现了该控制系统的数学建模、系统仿真以及系统参数优化等功能。
首先,介绍了控制系统的基本概念和主要组成部分,并提出了仿真和优化的目标。
然后,通过MATLAB软件实现了对该控制系统的数学建模和仿真,并通过仿真结果验证了系统的控制效果。
最后,通过参数优化方法对系统的控制参数进行了优化,并进一步提高了系统的控制性能和稳定性。
关键词:MATLAB控制系统;仿真;参数优化1.引言控制系统是现代自动化技术中重要的组成部分,广泛应用于各个领域。
控制系统的性能和稳定性对于保证系统的正常运行具有重要作用。
而仿真分析和参数优化是提高控制系统性能和稳定性的重要手段。
MATLAB是一种功能强大、灵活性高的工程计算软件,被广泛应用于各个领域的仿真分析和参数优化。
2.控制系统的数学建模和仿真控制系统的数学建模是控制系统仿真的基础。
通过对控制系统的数学模型的建立,可以利用MATLAB软件进行系统的仿真分析。
本文选择了其中一控制系统作为研究对象,通过对该系统进行数学建模,得到了控制系统的状态方程和传递函数。
然后,利用MATLAB软件对该控制系统进行了仿真分析,并得到了系统的时间响应和频率响应等仿真结果。
3.控制系统参数优化控制系统参数优化是提高系统控制性能和稳定性的关键步骤。
本文采用了一种常用的参数优化方法,即遗传算法。
通过对遗传算法的原理和步骤进行介绍,对控制系统的控制参数进行了优化。
通过MATLAB软件实现了该方法,并得到了最优的系统参数。
4.结果分析与讨论通过系统的仿真和参数优化,本文得到了一组最优的系统参数,并对比了原始参数和优化参数的仿真结果。
仿真结果表明,经过参数优化后,系统的控制性能和稳定性得到了显著改善。
5.结论本文基于MATLAB控制系统仿真平台,实现了对其中一控制系统的数学建模、系统仿真以及系统参数优化等功能。
MATLAB仿真论文
信息与通信工程学院MATLAB仿真论文题目:基于matlab的系统仿真班级: 13级电信三班谢丽娟姓名:谢丽娟学号: 14132200845目录摘要 (2)一、关于MATLAB的基本知识 (2)1.1 MATLAB的介绍 (2)1.2 SIMULINK的介绍 (2)二、无环流可逆调速系统 (2)2.1 无环流可逆调速系统简介 (2)2.2逻辑无环流调速系统的原理图 (3)三、主电路的组成及其工作原理主电路的组成及其工作原理 (3)四、仿真系统的设计 (3)4.1电流环结构图的简化 (3)4.2 电流调节器结构的选择 (3)4.3转速调节器设计转速环结构图的简化 (4)4.4 转速调节器设计 (5)4.4 转速调节器设计 (5)4.5 转速调节器的参数计算 (5)4.6 逻辑控制器设计 (5)4.7逻辑控制器的组成 (6)五、逻辑无环流直流可逆调速系统仿真的建模 (6)5.1逻辑控制直流可逆调速原理和仿真模型 (6)5.2逻辑控制器模块 (7)5.3电平检测 (7)5.4延时电路 (8)5.5连锁保护 (8)六、仿真结果 (8)摘要许多生产机械要求电动机既能正传,又能反转,而且常常还需要快速的启动和制动,这就需要电力拖动系统具有四象限运行的特性,也就是需要可逆的调速系统,采用两组晶闸管反并联的可逆调速系统解决了电动机的正、反转运行和回馈制动问题,但是,如果两组装置的整流电压同时出现,便会产生不流过负载而直接在两项晶闸管之间流通的短路电流,称作环流。
又环流可逆系统虽然具有反响快,过渡平滑等优点,但设置几个环流电抗器终究是个累赘。
因此,当工艺过程对系统过度特性的平滑性要求不高时,特别是对于大容量的系统,常采用既没有直流平均环流又没有瞬时脉动环流的无环流可逆系统。
本文介绍了逻辑无环流可逆直流调速系统的基本原理及其构成,并对其控制电 路进行了计算和设计。
运用了一种基于 Matlab 的 Simulink 和 Power System 工具箱、 面向系统电气原理结构图的仿真新方法,实现了逻辑控制电流可逆调速系统的仿真。
电气论文基于MATLAB的电力系统短路故障仿真于分析

电气论文基于MATLAB的电力系统短路故障仿真于分析电力系统短路故障是电力系统中常见且严重的问题之一、对电力系统中的短路故障进行仿真分析可以帮助工程师更好地理解和解决该问题。
本文将介绍基于MATLAB的电力系统短路故障仿真与分析的方法。
首先,短路故障是电力系统中电流异常的一种形式,通常由设备故障或外部因素引起。
为了进行仿真,首先需要建立电力系统的数学模型。
在MATLAB中,可以使用节点或支路的导纳或阻抗矩阵来表示电力系统。
通过建立节点或支路的导纳矩阵,可以描述电力系统的电流和电压之间的关系。
其次,在进行短路故障仿真之前,需要确定故障类型和故障位置。
常见的短路故障类型包括对地短路、相间短路和两相短路等。
对于不同类型的短路故障,需要采用不同的电力系统边界条件来进行仿真。
然后,在进行短路故障仿真时,还需要考虑电力系统中各种设备的参数和特性。
这包括发电机、变压器、负载和传输线等设备的电流、电压和功率参数。
将这些参数考虑在内,可以更真实地模拟电力系统中的短路故障情况。
最后,在MATLAB中进行电力系统短路故障仿真后,可以对仿真结果进行分析和评估。
通过分析仿真结果,可以了解短路故障对电力系统的影响,并寻找解决故障的方法。
例如,可以通过改进保护装置或调整系统参数来减少短路故障对电力系统的影响。
综上所述,基于MATLAB的电力系统短路故障仿真与分析方法可以帮助工程师更好地理解和解决电力系统中的短路故障问题。
通过建立电力系统的数学模型,确定故障类型和位置,并考虑设备的参数和特性,可以进行准确的仿真。
通过分析仿真结果,可以找到解决故障的方法,进一步提高电力系统的可靠性和稳定性。
matlab仿真论文matlab图像处理论文

matlab仿真论文matlab图像处理论文跳频扩频系统的Matlab模拟仿真实现摘要:跳频扩频技术采用特定的扩频函数及载波跳变来实现频谱展宽,具有很强的抗干扰性,并具有信息隐蔽、多址保密通信的特点;PSK 调制方式由基带脉冲控制载波相位。
在Matlab/Simulink下建立了采用BPSK方式的跳频扩频( FH-SS )通信系统模拟模型,并编程仿真实现该系统,对跳频扩频通信的实现有重要意义。
关键词:跳频扩频; BPSK; Matlab; SimulinkImplementation of Matlab Simulation for Frequency-hopping Spread Spectrum SystemWANG Xiang-hong, ZHAO Hai-tao, GUAN Xiao-dong(Unit 95588 of PLA, Xi’an 710306, China)Abstract: The frequency-hopping spread spectrum technology has stronger anti-jamming ability, and the features of information hiding and multipath interference communication through the given spread-spectrum function andhopped-frequency. The PSK modulation mode and carrier phase are controlled by base-band pulse.The model of frequency-hopping spread spectrum communication system with BPSK mode is setted up with Matlab/Simulink. Finally this system is simulated withMatlab. It is very important for the communication system to realize the frequency-hopping spread spectrum communication.Keywords: frequency-hopping spread spectrum; BPSK; Matlab; Simulink收稿日期:2010-03-16跳频扩频 (Frequency-Hopping Spread Spectrum,FHSS)通信系统抗干扰性能优异,具有抗多径衰落、低截获概率、码分多址能力、距离分辨率高和精确定时等优点,应用范围越来越广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信息与通信工程学院MATLAB仿真论文题目:基于matlab的系统仿真班级: 13级电信三班谢丽娟姓名:谢丽娟学号: 14132200845目录摘要 (2)一、关于MATLAB的基本知识 (2)1.1 MATLAB的介绍 (2)1.2 SIMULINK的介绍 (2)二、无环流可逆调速系统 (2)2.1 无环流可逆调速系统简介 (2)2.2逻辑无环流调速系统的原理图 (3)三、主电路的组成及其工作原理主电路的组成及其工作原理 (3)四、仿真系统的设计 (3)4.1电流环结构图的简化 (3)4.2 电流调节器结构的选择 (3)4.3转速调节器设计转速环结构图的简化 (4)4.4 转速调节器设计 (5)4.4 转速调节器设计 (5)4.5 转速调节器的参数计算 (5)4.6 逻辑控制器设计 (5)4.7逻辑控制器的组成 (6)五、逻辑无环流直流可逆调速系统仿真的建模 (6)5.1逻辑控制直流可逆调速原理和仿真模型 (6)5.2逻辑控制器模块 (7)5.3电平检测 (7)5.4延时电路 (8)5.5连锁保护 (8)六、仿真结果 (8)摘要许多生产机械要求电动机既能正传,又能反转,而且常常还需要快速的启动和制动,这就需要电力拖动系统具有四象限运行的特性,也就是需要可逆的调速系统,采用两组晶闸管反并联的可逆调速系统解决了电动机的正、反转运行和回馈制动问题,但是,如果两组装置的整流电压同时出现,便会产生不流过负载而直接在两项晶闸管之间流通的短路电流,称作环流。
又环流可逆系统虽然具有反响快,过渡平滑等优点,但设置几个环流电抗器终究是个累赘。
因此,当工艺过程对系统过度特性的平滑性要求不高时,特别是对于大容量的系统,常采用既没有直流平均环流又没有瞬时脉动环流的无环流可逆系统。
本文介绍了逻辑无环流可逆直流调速系统的基本原理及其构成,并对其控制电 路进行了计算和设计。
运用了一种基于 Matlab 的 Simulink 和 Power System 工具箱、 面向系统电气原理结构图的仿真新方法,实现了逻辑控制电流可逆调速系统的仿真。
关键词: 直流电机;环流;逻辑无环流可逆调速;Matlab 仿真一、关于MATLAB 的基本知识1.1 MATLAB 的介绍 MATLAB 是矩阵实验室的简称,是美国MathWorks 公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB 和Simulink 两大部分它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C 、Fortran )的编辑模式,代表了当今国际科学计算软件的先进水平。
1.2 SIMULINK 的介绍 Simulink 是MATLAB 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
Simulink 具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink 已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。
同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink 。
。
Simulink 可以用连续采样时间、离散采样时间或两种混合的采 样时间进行建模,它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率。
为了创建动态系统模型,Simulink 提供了一个建立模型方块图的图形用户接口(GUI) ,这个创建过程只需单击和拖动鼠标操作就能完成,它提供了一种更快捷、直接明了的方式,而且用户可以立即看到系统的仿真结果。
二、无环流可逆调速系统 2.1 无环流可逆调速系统简介 许多生产机械要求电动机既能正传,又能反转,而且常常还需要快速的启动和制动,这就需要电力拖动系统具有四象限运行的特性,也就是需要可逆的调速系统,采用两组晶闸管反并联的可逆调速系统解决了电动机的正、反转运行和回馈制动问题,但是,如果两组装置的整流电压同时出现,便会产生不流过负载而直接在两项晶闸管之间流通的短路电流,称作环流。
这样的环流对负载无益,因此应该予以抑制或消除。
逻辑无环流系统目前生产中应用最为广泛的可逆系统,当一组晶闸管工作时,用逻辑电路封锁另一组晶闸管的触发脉冲,使他完全处于阻断状态,确保两组晶闸管不同时工作,从根本上切断了环流的通路,这就是逻辑控制的无环流可逆系统。
逻辑无环流调速系统主电路和系统控制电路的系统组成主电路采用两组晶闸管装置反并联线路;由于没有环流,不用设置环流电抗器;仍保留平波电抗器Ld ,以保证稳定与运行时电流波形连续;控制系统采用典型的转速、电流双闭环方案;电流环为内环,转速环为外环。
为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,既分别引入转速负反馈和电流负反馈。
1. 电流环分设两个电流调节器,ACR1用来控制正组出发装置GTF ,ACR2控制反组触发装置GTR 。
2. 速度环把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器。
3. 为了保证不出现环流,设置了无环逻辑控制环节DLC ,这是系统中的关键环节。
它按照系统的工作状态,指挥系统进行正、反组的自动切换。
2.2逻辑无环流调速系统的原理图 这种逻辑无环流系统有一个转速调节器ASR ,一个反号器 AR ,采用双电流调节器1ACR 和 2ACR ,双触发装置 GTF 和 GTR结构。
主电路采用两组晶闸管装置反并 联线路,由于没有环流,不用再设置环流电抗器,但是为了保证稳定运行时的电流 波形的连续,仍应保留平波电抗器,控制线路采用典型的转速﹑电流双闭环系统, 1ACR 用来调节正组桥电流,其输出控制正组触发装置 GTF ;2ACR 调节反组桥电 流, 其输出控制反组触发装置 GTR , 1ACR 的给定信号 U i 经反号器 AR 作为 2ACR 的给定信号 U i ,这样可使电流反馈信号 U i 的极性在正﹑反转时都不必改变, 从而可 采用不反映极性的电流检测器,在逻辑无环流系统中设置的无环流逻辑控制器 DLC ,这是系统中关键部件。
它按照系统的工作状态,指挥系统进行自动切换,或 者允许正组触发装置发出触发脉冲而封锁反组,或者允许反组触发装置发出触发脉 冲而封锁正组。
在任何情况下,决不允许两组晶闸管同时开放,确保主电路没有产 生环流的可能。
三、主电路的组成及其工作原理 主电路的组成及其工作原理 (1)V-M 系统的可逆线路的分类 根据电机理论,改变电枢电压的极性,或者改变励磁磁通的方向,都能够改变 直流电机的旋转方向。
因此,V-M 系统的可逆线路有两种方式: 电枢反接可逆线路--电枢反接反向过程快,但需要较大容量的晶闸管装置; 励磁反接可逆线路。
励磁反接反向过程慢,控制相对复杂,但所需晶闸管装置 容量小。
本系统采用的是电枢反接可逆接线方案。
(2)本系统的主电路组成及工作原理 系统采用的主电路是两组晶闸管装置反并联可逆线路。
两组晶闸管分别由两套 触发装置控制,不允许让两组晶闸管同时处于整流状态,否则将造成电源短路。
本系统采用的是三相桥式反并联可逆线路,可使电动机在四个象限内运转, 工作原理如下: 1.三相桥式反并联线路在任何时候都必须有两个晶闸管导通才能形成导电回 路,其中一个是共阴极组的,另一组是共阳极组的。
2.关于触发脉冲的相位,共阴极组的三个晶闸管之间应互差 120°共阳极组的 晶闸管之间也应该互差别 120°接在同一相的两管之间互差180°。
3.为了保证整流桥合闸后共阴极组和共阳极组各有一个晶闸管导通,或者在电 流断续后能再次导通,必须对两组中应导通的一对晶闸管同时给触发脉冲。
四、仿真系统的设计4.1电流环结构图的简化图4.1 电流环结构图最终简化图图4.2 电流调节器模块4.2 电流调节器结构的选择调节器基本思路: 将控制对象校正成为典型系统。
系统设计的一般原则:“先内环后外环”。
电流超调量δi ≤5% ,电流环按典型I 型系统设计电流环的控制对象是双惯性型的,要校正成典型 I 型系统,显然应采用PI 型的电流调节器。
从稳态要求上看,希望电流无静差,以得到理想的堵转特性,采用 I 型系统就够了。
从动态要求上看,实际系统不允许电枢电流在突加控制作用时有太大的超调,以保证电流在动态过程中不超过允许值,而对电网电压波动的及时抗扰作用只是次要的因素,电流环应以跟随性能为主。
4.3转速调节器设计转速环结构图的简化图4.3 转速环结构图最终简化图 图4.4 转速调节器模块 4.4 转速调节器设计 转速环按典型II 型系统设计,并选中频段宽度h=5。
为了实现转速无静差,在负载扰动作用点前面必须有一个积分环节,它应该包含在转速调节器 ASR 中,现在在扰动作用点后面已经有了一个积分环节,因此转速环开环传递函数应共有两个积分环节,所以应该设计成典型 Ⅱ 型系统,这样的系统同时也能满足动态抗扰性能好的要求。
4.5 转速调节器的参数计算 (1)传递函数可以写成: s s K s W n n n ASR 1)(ττ+=(1)τn=h(2T+Ton)=5*(2*0.0037+0.01)=0.087s (2)Kp2=(h+1)βCeTm/2hαR(2T+Ton)=6*0.05*0.113*0.275/2*5*0.00668*0.0174*(0.4+1.35+0.5)=3.56 (3)Ki2=τn/Kp2=0.087/3.56=0.024(4)转速调节器ASR 的输出限幅电压U*im 决定了电流给定电压的最大值;它是由负载电流 IdL 决定。
Idl=24A 。
则U*im=In-Idl*λ=136-1.5*24=10V 4.6 逻辑控制器设计 逻辑控制器的工作原理 逻辑控制器模块DLC 是根据控制器的输入来判断输出的逻辑状态。
逻辑控制器有两个输入输出,两个输出信号Ublr 和Ublf 分别通过触发器来控制是否产生还是封锁触发脉冲,输出信号Ublf 和Ublr 的状态必须始终保持相反,以保证两组整流器不会同时处于工作状态。
由于电动机的制动和改变转向都需要改变电动机的转矩方向,即电枢电流的方向,在系统控制中电流的方向是由转速调节器输出Ui*的极性来决定的,也就是说Ui*的符号改变是逻辑控制器切换的条件之一。
从a=β配合控制的分析中已经知道,可逆系统的快速制动或反转过程要经历本桥逆变,反馈制动和回馈制动三个阶段。