网络控制系统的发展现状及展望教学内容
通信工程论文参考文献

通信工程论文参考文献是对期刊论文引文进行统计和分析的重要信息源之一,下面是的通信工程论文参考文献,供大家阅读查看。
[1] 杜大军,费敏锐,宋杨,李雪. 网络控制系统的简要回忆及展望[J]. 仪器仪表学报. xx(03)[2] 詹习生. 基于通信约束的网络化控制系统最优性能研究[D]. 华中科技大学 xx[3] 王宝贤. 融合通信参量的网络系统跟踪性能极限研究[D].华中科技大学 xx[4] 孙凤兰. 多智能体网络的一致性研究[D]. 华中科技大学xx[5] 彭可. 合金化和纳米复合化制备(Mo,W)Si2-SiC材料及其性能研究[D]. 中南大学 xx[6] 李洪波,孙增圻,孙富春. 网络控制系统的开展现状及展望[J]. 控制理论与应用. xx(02)[7] 祁恬,刘寅,苏为洲. 基于量化控制信号的线性系统的跟踪性能极限[J]. 控制理论与应用. xx(07)[8] 彭可. 控制网络系统性能分析、系统设计和网络互连的研究与应用[D]. 中南大学 xx[9] 冯海林. 网络系统中可靠性问题的研究[D]. 西安电子科技大学 xx[10] 郭一楠,张芹英,巩敦卫,张建化. 一类时变时延网络控制系统的鲁棒容错控制[J]. 控制与决策. xx(06)[11] Hong SHI, Long WANG, Tianguang CHU (Intelligent Control Laboratory, Center of Systems and Control,Department of Mechanics and Engineering Science, Peking University, Beijing 100871,China). Swarming behavior ofmulti-agent systems[J]. Journal of Control Theory and Applications. xx(04)[12] Dong Wang,Jianliang Wang,Wei Wang. Output feedback control of worked control systems with packet dropouts in both channels[J]. Information Sciences . xx[13] Fenglan Sun,Zhi-Hong Guan. Finite-time consensusfor leader-following second-order multi-agent system[J]. International Journal of Systems Science . xx (4)[14] Meiying Ou,Haibo Du,Shihua Li. Finite-timetracking control of multiple nonholonomic mobile robots[J]. Journal of the Franklin Institute . xx (9)[1] 谢显中,聂能. 3G手机不再神秘[J]. 数字通信. 2000(10)[2] 谢显中,李颖,吴克颖,王新梅. Turbo码与空时编码的结合研究及其性能[J]. 西安电子科技大学学报. xx(06)[3] 刘正军,蔡国权,罗小武. DS-CDMA系统中一种盲2-D RAKE接收机的研究[J]. 电子学报. 1999(S1)[4] 葛利嘉,路鸣. 蜂窝通信的空分多址:概念、算法和性能[J]. 通信学报. 1999(08)[5] 谢显中,柏春燕,王新梅. 神经网络技术在纠错码研究中的现状与前景[J]. 西安电子科技大学学报. 1999(03)[6] 柏春燕,谢显中,王新梅. 基于前馈神经网络的分组码译码方案[J]. 西安电子科技大学学报. 1999(02)[7] 谢显中,王新梅. 第三代移动通信系统的空中接口方案[J]. 移动通信. 1999(01)[8] 谢显中,苗洪雷,李颖,王新梅. 分层空时码的模型、译码接收及其性能仿真[J]. 通信学报. xx(08)[9] 蒋伯峰,王文杰,殷勤业. 利用波达方向矩阵法实现多径信道方向角与相对时延的联合估计[J]. 电子学报. 1999(S1)[10] 金梁,汪仪林,殷勤业. 多用户环境下阵列响应的闭式盲估计方法[J]. 电子学报. 1999(12)[11] 谢显中. TDD模式与第三代移动通信系统[J]. 现代电信科技. 2000(02)[12] 郑元谨,闻懋生. 基于神经网络的(23,12)Golay码译码新算法[J]. 通信技术. 1996(02)[13] 殷贯西. 移动卫星信道中的数字传输[D]. 西安电子科技大学 1998[14] 田斌. 实用化汉语语音识别理论及关键技术研究[D]. 西安电子科技大学 1999[15] 白宝明. Turbo码理论及其应用的研究[D]. 西安电子科技大学 1999[16] 徐大专,顾长青,许宗泽. 神经网络在分组码软判决译码中的应用[J]. 电子学报. 1995(04)[17] 杨义先. 神经网络与编码理论--国内外成果综述与未解决的问题[J]. 北京邮电学院学报. 1992(02)[1] 熊炜,李清泉. 高速公路场景中车用自组织网络1-连通的必要条件[J]. 软件学报. xx(11)[2] 谢旭,黄本雄,王芙蓉,李可维,王浩. 车用自组织网络SR-ALOHA协议分析[J]. 微电子学与计算机. xx(04)[3] 安建伟,郑青,杨扬,米振强. 车载自组网路由稳定性分析[J]. 计算机工程与应用. xx(10)[4] 杨博,刘大有,金弟,马海宾. 复杂网络聚类方法[J]. 软件学报. xx(01)[5] 吴青,何智伟,初秀民,宗成强. 智能车路系统中汽车列队行驶控制关键技术与研究进展[J]. 交通与计算机. xx(04)[6] 高德荃. 城市道路交通状态数据模式分析研究[D]. 武汉大学 xx[7] 曹霞. RICU中COPD有创机械通气患者血清瘦素、肌肉生长抑制素、TNF-α水平及营养状况与延迟脱机关系的研究[D]. 武汉大学 xx[8] 涂伟. 基于Voronoi图的大规模物流车辆路径优化方法研究[D]. 武汉大学 xx[9] CO-OPerative systEms for intelligent Road Safety (COOPERS).[10] SAFESPOT Integrated Project.[11] Cooperative Vehicle-Infrastructure Systems (CVIS).[12] 刘鸿飞,黄席樾,李丽君,张仔兵. 车用自组织网络分层优化策略研究[J]. 系统工程理论与实践. xx(07)[13] 熊炜,李清泉. 高速公路场景中车用自组织网络1-连通的必要条件[J]. 软件学报. xx(11)[14] 谢旭,黄本雄,王芙蓉,李可维,王浩. 车用自组织网络SR-ALOHA协议分析[J]. 微电子学与计算机. xx(04)[15] 安建伟,郑青,杨扬,米振强. 车载自组网路由稳定性分析[J]. 计算机工程与应用. xx(10)[16] 杨博,刘大有,金弟,马海宾. 复杂网络聚类方法[J]. 软件学报. xx(01)[17] 吴青,何智伟,初秀民,宗成强. 智能车路系统中汽车列队行驶控制关键技术与研究进展[J]. 交通与计算机. xx(04)[18] 刘鸿飞,黄席樾,李丽君,张仔兵. 车用自组织网络分层优化策略研究[J]. 系统工程理论与实践. xx(07)[19] 孙利民等编着.无线传感器网络[M]. 清华大学出版社,xx[20] 姜桂艳着.道路交通状态判别技术与应用[M]. 人民交通出版社, xx。
物理专业本科毕业论文参考题目 (1)
物理专业本科毕业论文参考题目一、物理教学研究方向1 新课标下基础物理课程改革与发展的趋势2 主观性试题与客观性试题的比较研究3 从批判性思维走向批判性教学4 试论科学探究中的“提出问题”5 激发物理学习动机的策略6 物理教学中体验性活动项目的建设与研究7 高中物理实验的改革研究8 物理教学中STS教育(科学技术和社会)教育9 物理教学中的情感教育10 论中学生物理知识结构的形成过程11 物理活动课的教学模式12 物理教学中的决策能力的培养13 谈微型物理实验14 物理教学与学生创造能力的培养15 21世纪的网络教育对物理教学的影响16 物理教学中多媒体课件的设计17 多媒体技术与物理教学18 物理教学中的科学价值观教育19 物理教学中的环境教育20 物理教学模式与教学方法21 浅谈物理创造教育的模式22 习题教学与思维能力的培养。
23 论中学物理教育中的化学史教育24 谈物理教师的素质结构25 论物理教育中辩证唯物主义观点教育26 谈物理教学中的审美教育27 物理课外活动的现状与对策28 论物理教学中思维能力的培养29 物理教学中科学方法的培养研究30 物理式样教学中的问题与对策31 物理实验教学与环境意识的培养32 物理实验教学中如何培养学生的观察能力33 物理实验教学与创造能力的培养34 物理教学中创造能力的培养35 物理课堂顺应教学方法研究36 定义不完善问题(ill-defined problem)教学研究37 李约瑟难题与中学物理教育38 从经营教育到大众教育~我国中学物理教材沿革回顾39 中学物理学习“差生”的归因分析40 不同类型高级中学学生学习物理动机的比较分析41 谈“从生活走向物理,从物理走向社会”42 论教学目标、教学内容的无限性与教学时间、教学空间有限性的矛盾43 教育课程改革与教师职业专业化的思考44 物理实验在中学素质教育中的地位和作用45 教育人才的培养与高师教育改革的新思维46 特殊能力与综合能力的关系与培养47 在教学中“育人”与理想教育48 科学用脑和发展高效性学习49 初中物理习题教学的效益问题50 物理教学中的素质教育研究二、普通物理方向1 氢气辉光放电的基本原理2 氢分子放电中电子的输运过程研究3 关于植物细胞内外水分的热力学关系4 单晶Ni2MnGa马氏体的微观机构分析5 热传递过程不可逆性的统计分析6 物理学家的成才与环境7 爱因斯坦的光子论及其意义8 关于半波损失问题的探讨9 关于№直流辉光放电光学发射谱研究10 离子(断,H’)碰撞截面综述11 在氢直流辉光中离子H+。
国内外智慧教室研究评论及展望

又涉及到信息技术、人工智能、物联网等技术的综合应用与创新。
二、智慧教室的背景介绍
智慧教室的概念起源于20世纪90年代,随着信息技术的不断发展,越来越多 的国家和地区开始推广和应用智慧教室。例如,美国、英国、德国、新加坡等国 家在智慧教室方面进行了大量的研究和实践,取得了一定的成果。在国内,
智慧教室也得到了越来越多的和研究,成为教育信息化发展的重要方向。
四、智慧教室的研究趋势
随着人工智能、物联网等技术的不断发展,未来智慧教室的研究将更加注重 人性化、个性化和智能化。具体来说,未来智慧教室的研究趋势将包括以下几个 方面:
1、以学生为中心:未来的智慧教室将更加注重学生的个性化需求和学习风 格,通过智能化的教学设备和软件,为学生提供更加灵活多样的学习方式和更加 丰富的学习资源。
提高团队协作能力和知识建构水平。本次演示将探讨智慧教室小组合作学习 设计及成效。
在智慧教室小组合作学习设计中,以下几个方面值得:
1、任务设计:任务是小组合作学习的核心,任务的设计应具有开放性、综 合性、可操作性等特点。教师需要根据学生的实际情况和教学内容,精心设计
任务,以便学生能够通过合作学习掌握相关知识和技能。
3、拓展教学资源:借助互联网技术,智慧教室可以将全球范围内的优质教 学资源整合在一起,使学生和教师能够随时随地获取最新的知识和信息。
三、智慧教室的特征
智慧教室具有以下特征:
1、智能化设备:智慧教室配备了一系列智能化设备,如智能黑板、智能投 影仪、智能音响等,方便教师教学和学生互动。
2、数字化环境:智慧教室的一切设备都连接到云端,实现了数据的实时采 集和分析,为个性化教学提供了强有力的支持。
2、智慧教室的优缺点分析:智慧教室具有提高教学质量、促进个性化学习、 提升学生全面发展等优点,但也存在着一些问题。例如,技术依赖性强、设备成 本高、教师技术水平要求高等。
DCS控制系统化工应用现状及展望
DCS控制系统化工应用现状及展望韩卫凯摘要:DCS(分布式集散控制系统)是基于计算机信息技术、网络通信技术和信号采集技术上发展而来的新型控制系统,在化工、冶金、机械等多个行业都有较为广泛的应用。
充分利用DCS控制系统所具有的便捷性、可靠性、灵活性优势,能够有效提升化工企业生产效率,提升安全生产水平。
本文简要概述DCS控制系统在化工生产中的应用优势,分析当前具体应用情况,并结合技术发展趋势,提出对应的发展方向,以此为相关应用管理提供参考。
关键词:DCS控制系统;化工;应用现状;展望DCS控制系统在应用于化工企业生产管理体系中,主要具有历史记录、过程报警、自动控制、实时监控等多方面功能,在结合生产要求设定对应的运行参数后,系统就能够自动实现对应的自动控制功能。
DCS控制系统基于控制分散、操作和管理集中的基本设计思想,基于分级递阶结构运行,每一个子系统都具有特定的运行控制目标,因此具有较高的运行可靠性,对工业生产管理模式变革起到积极的促进作用。
1、DCS控制系统在化工生产中的应用优势传统的化工企业生产管理体系中,生产控制管理主要是以人工操作模式为主,在员工工作技能培训不到位、工作态度不认真,操作出现失误情形下,,必然会出现不同形式的安全事故。
同时在日常管理体系中,对设备检修工作重视程度不足,在检修工作不到位的情形下,会出现设备老化或故障现象无法及时处理的情形。
这些问题的存在,都会对企业生产经济效益和社会效益造成影响[1]。
DCS控制系统由于采用分布式集散控制模式,具有可靠性高、灵活性强、协调性高、易于维护等多方面特征。
将其应用于化工企业生产流程组织中,能够实时性、全方位的监控各个设备的运行状态,能够及时发现设备运行中存在的问题,并将对应的控制信号传输至集中管理平台,在系统自动采集故障数据后,能够及时切断故障设备与相关联设备的联系,尽量将故障现象带来的影响控制在最小范围内。
同时,DCS控制系统是采用模块化运行方式,在企业进行生产技术改造时,能够根据实际改造要求增加或删除相应的模块,从而确保系统运行的灵活性、完整性,确保生产管理的稳定性。
广域保护(稳控)技术国际现状及展望
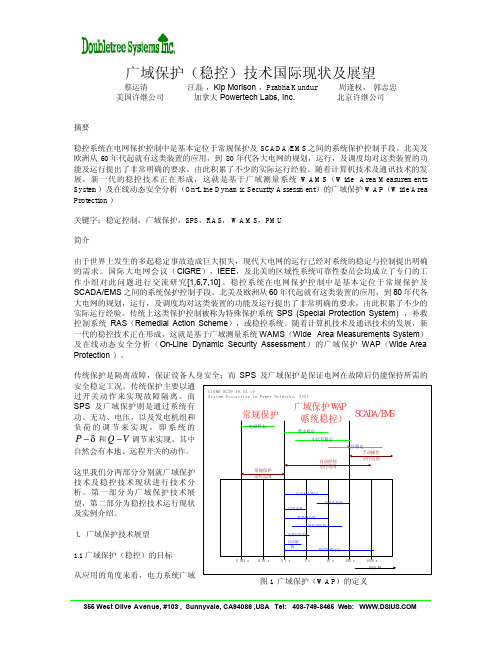
广域保护(稳控)技术国际现状及展望蔡运清汪磊,Kip Morison ,Prabha Kundur周逢权,郭志忠美国许继公司加拿大 Powertech Labs, Inc. 北京许继公司摘要稳控系统在电网保护控制中是基本定位于常规保护及SCADA/EMS之间的系统保护控制手段。
北美及欧洲从60年代起就有这类装置的应用,到80年代各大电网的规划,运行,及调度均对这类装置的功能及运行提出了非常明确的要求,由此积累了不少的实际运行经验。
随着计算机技术及通讯技术的发展,新一代的稳控技术正在形成,这就是基于广域测量系统WAMS(Wide Area Measurements System)及在线动态安全分析(On-Line Dynamic Security Assessment)的广域保护WAP(Wide Area Protection )关键字:稳定控制,广域保护,SPS,RAS, WAMS,PMU简介由于世界上发生的多起稳定事故造成巨大损失,现代大电网的运行已经对系统的稳定与控制提出明确的需求。
国际大电网会议(CIGRE),IEEE,及北美的区域性系统可靠性委员会均成立了专门的工作小组对此问题进行交流研究[1,6,7,10]。
稳控系统在电网保护控制中是基本定位于常规保护及SCADA/EMS之间的系统保护控制手段。
北美及欧洲从60年代起就有这类装置的应用,到80年代各大电网的规划,运行,及调度均对这类装置的功能及运行提出了非常明确的要求,由此积累了不少的实际运行经验。
传统上这类保护控制被称为特殊保护系统 SPS (Special Protection System) ,补救控制系统 RAS(Remedial Action Scheme),或稳控系统。
随着计算机技术及通讯技术的发展,新一代的稳控技术正在形成,这就是基于广域测量系统WAMS(Wide Area Measurements System)及在线动态安全分析(On-Line Dynamic Security Assessment)的广域保护WAP(Wide Area Protection )。
2024版华为培训学新版Datacom

华为培训学新版Datacom REPORTING2023 WORK SUMMARY目录•Datacom技术概述•网络基础知识梳理•路由交换技术深入剖析•网络安全策略部署与优化•故障排查与性能调优技巧分享•华为Datacom产品配置实践•总结回顾与未来展望PART01 Datacom技术概述Datacom定义与发展趋势Datacom定义Datacom(数据通信)是指通过计算机网络进行数据传输和通信的技术,是实现各种信息系统互联互通的基础。
发展趋势随着云计算、大数据、物联网等技术的快速发展,Datacom技术正朝着更高速度、更大容量、更低时延、更安全可靠的方向发展。
华为Datacom产品家族介绍路由器产品包括AR系列路由器、NE系列路由器等,提供丰富的接口类型和高性能转发能力,满足不同场景的组网需求。
无线产品包括Wi-Fi 6/6E无线接入点、5G CPE 等,提供高速无线接入和移动性支持,满足各种无线应用场景的需求。
交换机产品包括CloudEngine系列交换机、S系列交换机等,提供大容量、高密度的端口接入和高速转发能力,支持多种网络协议和特性。
安全产品包括防火墙、VPN网关、入侵检测/防御系统等,提供全面的网络安全防护和管理功能。
应用场景及市场需求分析应用场景Datacom技术广泛应用于政府、金融、教育、医疗、企业等各个领域,支持各种信息系统的建设和运行。
市场需求随着数字化转型的加速推进,市场对Datacom技术的需求不断增长,特别是在云计算、大数据、物联网等新兴领域的应用需求更加旺盛。
培训目标与课程设置培训目标通过华为培训学新版Datacom课程的学习,使学员全面掌握Datacom技术的基础知识和实践技能,能够独立完成网络规划、设计、实施和运维等工作。
课程设置包括Datacom基础、路由交换技术、无线技术、网络安全技术等多个模块,涵盖理论讲解、实验操作、案例分析等多种教学方式。
PART02网络基础知识梳理OSI七层模型及TCP/IP协议栈OSI七层模型01物理层、数据链路层、网络层、传输层、会话层、表示层、应用层TCP/IP协议栈02网络接口层、网络层、传输层、应用层各层功能及协议03如物理层负责传输比特流,数据链路层负责将比特流组合成帧等;TCP/IP协议栈中,IP协议位于网络层,TCP和UDP协议位于传输层等路由器交换机防火墙负载均衡器常见网络设备功能介绍01020304连接不同网络,实现路由选择和数据转发用于局域网内设备之间的数据交换保护网络安全,过滤非法访问和数据包分发网络负载,提高网络性能和可靠性局域网、广域网技术原理及应用以太网、令牌环网、FDDI等PPP、HDLC、ATM、帧中继等星型、树型、环型、网状型等企业内部网络、园区网络、城域网等局域网技术广域网技术网络拓扑结构应用场景IP地址分类子网划分与CIDRIP地址分配策略IP地址管理工具IP地址规划与管理方法A类、B类、C类、D类、E类静态分配、动态分配(DHCP)提高IP地址利用率,减少网络广播风暴IPAM(IP Address Management)系统,实现IP地址的集中管理和监控PART03路由交换技术深入剖析路由原理及静态路由配置实践路由表与路由查找流程了解路由表结构,掌握路由查找过程,理解路由优先级和度量值概念。
智能PID控制的发展现状及应用展望

智能PID控制的发展现状及应用展望【摘要】智能PID控制是一种在工业控制领域应用广泛的控制技术。
本文首先介绍了智能PID控制的重要性和定义,然后简要概述了智能PID控制技术的发展历程以及其基本原理。
接着分析了智能PID控制在工业控制中的应用,并展望了该技术的发展趋势和在自动化领域的前景。
总结部分强调了智能PID控制技术的重要性,并探讨了其应用前景和发展趋势。
通过本文的阐述,读者可以更全面地了解智能PID控制技术在工业控制中的重要性和潜在价值,为相关领域的研究和实践提供借鉴。
【关键词】智能PID控制,发展现状,应用展望,重要性,定义,技术,历程,基本原理,工业控制,发展趋势,自动化领域,前景展望,结论。
1. 引言1.1 智能PID控制的重要性智能PID控制在现代工业控制中扮演着重要的角色,其重要性主要体现在以下几个方面:1. 提高系统稳定性和精度:PID控制器通过不断地调整控制参数,使得系统能够更快地响应外部干扰,变化更加平稳,从而提高系统的稳定性和精度。
2. 降低成本和提高效率:智能PID控制可以根据系统的实时情况进行调节,使得系统运行更加高效,减少了资源的浪费,降低了生产成本。
3. 适应性强:智能PID控制器可以根据系统的实时变化进行自适应调整,无需人工干预,自动适应环境变化,提高了系统的适应性和鲁棒性。
4. 扩展性好:智能PID控制器可以根据系统需求进行扩展和改进,实现多种控制策略的组合,应对不同的控制问题,提高了系统的灵活性。
智能PID控制在工业控制中的重要性不言而喻,它已经成为现代工业自动化控制系统的核心技术之一,对于提高生产效率、降低成本、改善产品质量具有非常重要的意义。
1.2 智能PID控制的定义智能PID控制是一种基于比例、积分和微分的控制算法,通过对系统的反馈进行连续调节,以实现系统的稳定性和性能优化。
PID控制器根据系统的偏差(即期望值与实际值之间的差异)来调整输出信号,使系统的输出尽可能接近期望值。
智能控制的学习心得与体会及展望

智能控制的学习与总结智能控制的学习与思考一、我对智能控制的理解从开始上学学习知识以来,所学到的知识用我自己的理解与感觉就是:所学的知识越来越复杂,其模型越来越接近实际,感觉最深的是在数学课与物理课上,其模型不在只是考虑理想状态下,或者只在线性关系下,其中要考虑到很多的问题,不再只是一个简单的式子就可以表达、求解。
而这学期所学的智能控制感觉是相对于之前学的经典控制理论与现代控制理论,其研究对象是更为实际与现实的问题,但是与之前不同之处在于,现在的智能控制不只是研究对象更加实际、现实,而且是提出了新的方法途径,相比较与经典的控制理论,智能控制的研究对象有其自己的特点:1. 不确定性的模型智能控制的研究对象通常存在严重的不确定性。
这里所说的模型不确定性包含两层意思:一是模型未知或知之甚少;二是模型的结构和参数可能在很大范围内变化。
2. 高度的非线性对于具有高度非线性的控制对象,采用智能控制的方法往往可以较好地解决非线性系统的控制问题。
3. 复杂的任务要求对于智能控制系统,任务的要求往往比较复杂。
二、智能控制与传统控制的关系智能控制与传统的或常规的控制有密切的关系,不是相互排斥的。
常规控制往往包含在智能控制之中,智能控制也利用常规控制的方法来解决“低级”的控制问题,力图扩充常规控制方法并建立一系列新的理论与方法来解决更具有挑战性的复杂控制问题。
1. 传统的自动控制是建立在确定的模型基础上的,而智能控制的研究对象则存在模型严重的不确定性,即模型未知或知之甚少者模型的结构和参数在很大的范围内变动,比如工业过程的病态结构问题、某些干扰的无法预测,致使无法建立其模型,这些问题对基于模型的传统自动控制来说很难解决。
2. 传统的自动控制系统的输入或输出设备与人及外界环境的信息交换很不方便,希望制造出能接受印刷体、图形甚至手写体和口头命令等形式的信息输入装置,能够更加深入而灵活地和系统进行信息交流,同时还要扩大输出装置的能力,能够用文字、图纸、立体形象、语言等形式输出信息。
主要国家微型电网部署现状及展望

主要国家微型电网部署现状及展望微型电网由分布式电源、用电负荷、能量管理系统等组成。
作为新一代电力系统的重要组成部分,微型电网充分利用风力、太阳能等产生的清洁电力,减少了石油和煤炭等化石燃料发电带来的污染排放,灵活性好、经济环保、能效较高。
当前全球约有21000个微型电网为4800万人服务,到2030年被服务人口将扩大到5亿,届时需要部署217000个微型电网,其中大部分是太阳能微型电网,可以避免15亿吨二氧化碳排放[1],各地用于构建微型电网的储能装机容量将达到37吉瓦,创造约401亿美元的营收[2]。
近年来,各国积极部署微型电网,纷纷制定政策和法规来促进微型电网的建设与应用,赋能加速电力行业能源转型。
本文梳理了2020年以来美国、欧盟、澳大利亚、加拿大、中国等主要国家在微型电网方面的部署情况和典型案例,总结了微型电网发展的重点方向和关键技术,以供决策参考。
一、主要国家微型电网部署情况1、美国美国部署微型电网的重点主要集中在提高供电可靠性和实现电网智能化方面。
2020年12月,美国能源部(DOE)开始制定“微型电网规划战略”(Microgrid Program Strategy)[3],旨在到2035年,将微型电网打造成未来电力输送系统的重要组成部分,构建韧性、零碳、可负担的电力网络,将微型电网从设计到调试阶段的时间和成本分别降低20%、15%。
2021年5月,DOE宣布研发出监测安装在美国各地微型电网的新型交互式工具[4],有助于电网安装经验交流和相关数据文件下载。
2023年10月,DOE发布105亿美元的“电网韧性与创新伙伴关系计划”(GRIP)[5],将在美国44个州部署400个独立微型电网,增强电网系统韧性。
目前,加利福尼亚州、密歇根州、佛罗里达州等地均部署有微型电网[6],多由太阳能光伏和储能系统组成。
2、欧盟欧盟微型电网建设主要集中于制定更先进的解决方案和示范项目部署。
2022年4月,欧洲能源转型智能网络技术与创新平台(ETIP SNET)公布《2022—2025年综合能源系统研发实施计划》重点资助项目[7],包括支持孤岛模式运行的微型电网。
现代主要控制方法的研究现状及展望
现代主要控制方法的研究现状及展望现代主要控制方法的研究现状及展望1. 引言控制技术一直是工程领域的重要研究方向,随着科技的不断发展,现代主要控制方法成为了当前的研究热点。
控制方法的研究旨在实现对系统状态或输出的精确控制,从而达到预期的性能指标。
本文将就现代主要控制方法的研究现状及展望展开讨论。
2. 现代控制方法的分类现代控制方法主要包括PID控制、自适应控制、模糊控制、神经网络控制和模型预测控制等。
这些方法在不同的应用领域中发挥着重要作用,但也存在着不同程度的局限性。
在研究现状方面,各种控制方法都在不断地进行改进和发展,以满足对控制精度和鲁棒性的要求。
3. PID控制方法的研究现状PID控制作为一种经典的控制方法,其研究侧重于提高控制系统的稳定性和鲁棒性。
近年来,研究者们通过引入自适应算法和模糊逻辑等方法,对PID控制进行了改进,使其在复杂系统中也能够取得较好的控制效果。
然而,PID控制仍然存在参数调节繁琐、鲁棒性差等问题,未来的研究重点将集中在自适应PID控制和非线性PID控制等方向。
4. 自适应控制方法的研究现状自适应控制旨在实现对系统参数变化的自动调节,以保持系统的性能。
近年来,基于模型参考自适应控制和自适应滑模控制等方法得到了广泛研究和应用。
这些方法通过建立系统模型并引入自适应机制,实现了对系统参数变化的实时跟踪和调节。
未来的研究方向将聚焦于复杂系统的自适应控制和混沌系统的自适应控制等。
5. 模糊控制方法的研究现状模糊控制方法利用模糊逻辑对系统进行建模和控制,能够很好地处理系统的非线性和模糊性。
近年来,研究者们通过改进模糊推理算法和优化控制规则,提高了模糊控制方法的控制精度和鲁棒性。
未来,模糊控制方法有望在智能控制、模糊神经网络和模糊PID控制等方面得到进一步拓展和应用。
6. 神经网络控制方法的研究现状神经网络控制方法利用神经网络对系统进行建模和控制,能够很好地处理非线性和时变系统。
目前,基于深度学习和强化学习等方法的神经网络控制正在得到广泛关注和研究。
智能控制的学习心得与体会及展望范本

智能控制的学习心得与体会及展望范本智能控制是一门涉及人工智能和控制系统的交叉学科,通过利用智能算法和技术,来实现对复杂系统的自主控制和优化调节。
在我学习智能控制的过程中,我深刻体会到了智能控制的强大和应用广泛性,并对未来的发展充满了信心。
首先,智能控制的优势在于其能够处理非线性和复杂系统。
传统的控制方法在处理非线性和复杂系统时往往面临困难,因为这些系统具有非线性和不确定性,难以建立准确的模型进行控制。
而智能控制利用神经网络、遗传算法等智能算法,能够对非线性和复杂系统进行建模和控制,提高系统的稳定性和控制性能。
其次,智能控制的应用广泛,涵盖了工业控制、机器人控制、交通运输等众多领域。
比如,在工业控制中,智能控制可以优化生产过程,提高生产效率和产品质量;在机器人控制中,智能控制可以实现自主导航和智能操作,提高机器人的工作能力;在交通运输中,智能控制可以优化交通信号控制,减少拥堵和排放,提高交通效率。
智能控制的广泛应用为我们带来了更加智能和便利的生活。
在学习智能控制的过程中,我不仅了解了智能控制的原理和算法,还进行了实践操作。
我进行了一些小型控制项目的设计和实现,并通过模拟仿真和实际测试,验证了智能控制的有效性和性能优势。
我深刻体会到了智能控制的灵活性和适应性,在不同的系统和环境下都能取得较好的控制结果。
此外,智能控制还与其他技术和学科相结合,形成了诸多交叉领域的研究方向。
比如,智能控制与机器学习的结合可以实现自主学习和迭代优化;智能控制与物联网的结合可以实现智能感知和远程控制。
这些交叉领域的研究为智能控制带来了更多的应用场景和发展前景。
展望未来,我认为智能控制将会有更广泛的应用和更深远的影响。
随着人工智能和大数据技术的不断发展,智能控制将能够更好地处理复杂、大规模的系统,实现更精确和高效的控制。
智能控制还将与其他领域的技术相结合,推动人工智能和控制系统的融合,实现更高级别的智能化控制。
未来智能控制的应用领域也将更加广泛,比如在智能家居、智能交通、智能医疗等方面将会有更多的创新和突破。
工程学概论-课程教学大纲

工程学概论课程教学大纲课程名称:工程学概论英文名称:Introduction to Engineering Science课程类别:学科基础课总学时:16(包括实验、上机)适应对象:自动化专业一、本课程的性质、目的与任务:本课程是自动化专业的一门学科基础课。
本课程的任务是针对自动化专业所涉及到的各门课程和知识作一个系统性的论述,使得本专业学生了解自动化学科研究主要内容、发展现状与动向,为以后从事自动化方面的学习和科研打下必要基础二、教学基本要求:1.了解工程教育和工业创新的基本思想。
2.了解工业控制的发展和基本知识。
3.了解当今时代的几种新兴自动化控制技术、发展及动向。
三、课程内容:第一讲工程教育与工业创新1.工程教育与工业2.工业创新3.工程教育改革4..核心问题第二讲工程控制论1.现代化,技术革命与控制论2.工程控制论3.现代控制工程第三讲智能控制系统1.智能控制系统的发展2.智能控制系统和神经网络(Neural Network)3.智能控制系统的设计理论4.智能控制—超越世纪的目标第四讲信息时代的自动化技术1.信息时代与自动化技术2.计算机集成制造技术3.机器人,机器人化生产及机器人化机器4.基于信息高速公路的全国工厂网络第五讲现场总线技术与工厂自动化1.分层式工厂自动化网络系统2.现场总线3.现场总线技术浅释4.PROFIBUS:开放、通用、标准的现场总线5.展望第六讲计算机控制技术与仿真1.计算机控制系统2.单片机(微处理器MicroProcessor)3.可编程控制器(Programmable Controller) 4.计算机仿真5.虚拟现实技术6.虚拟仪器第七讲运动控制1.运动控制——一门综合多学科的交叉技术2.21世纪国际电力电子技术的发展和进步。
浅谈控制理论演化及其发展趋势
浅谈控制理论演化及其发展趋势发布时间:2022-06-22T06:30:48.395Z 来源:《科技新时代》2022年6期作者:陈安杰[导读] 根据控制理论的理论基础及所能解决的问题的难易程度,我们把控制理论大体的分为了三个不同的阶段,经典控制论阶段,现代控制论阶段以及大系统理论与智能控制理论阶段。
本文在每个阶段都指出了其控制思路、主要成果以及不足,并在现代控制论部分给出了单输入单输出系统的R-L-C电路状态空间表达式。
最后结合当前的云计算阐述了控制理论的发展趋势及应用前景。
陈安杰(杭州万向职业技术学院,浙江杭州 310023)摘要:根据控制理论的理论基础及所能解决的问题的难易程度,我们把控制理论大体的分为了三个不同的阶段,经典控制论阶段,现代控制论阶段以及大系统理论与智能控制理论阶段。
本文在每个阶段都指出了其控制思路、主要成果以及不足,并在现代控制论部分给出了单输入单输出系统的R-L-C电路状态空间表达式。
最后结合当前的云计算阐述了控制理论的发展趋势及应用前景。
关键词:控制理论;现代控制;状态空间表达式;大系统理论;智能控制Talk about the evolution and development trend of control theoryChen An-jieHangzhou Wanxiang polytechnic College, Hangzhou 310023,ChinaAbstract: According to the theoretical basis of control theory and the difficulty degree of the problem it can solve, we divide control theory into three different stages, classical control stage, modern control stage and large system theory and intelligent control theory stage. In this paper, the control ideas, main achievements and shortcomings are pointed out in each stage, and the expression of R-L-C circuit state space of SISO system is given in the section of modern control stage. Finally, the development trend and application prospect of control theory are described in combination with current cloud computing.Key words:Control theory; Modern control; State space expression; Large systems theory; Intelligent control1 控制理论的演化发展史控制理论是关于各种系统的一般性控制规律的科学,它研究如何通过信号反馈来修正动态系统的行为和性能,以达到预期的控制目的[1]。
2024《Linux操作系统》教学大纲

01引言Chapter课程背景与意义01掌握Linux操作系统的基本概念、体系结构和常用命令。
020304理解Linux文件系统、进程管理、内存管理、设备管理等核心原理。
学会配置和管理Linux服务器,包括网络配置、安全设置、软件安装与卸载等。
培养学生的实践能力和问题解决能力,能够独立完成实验项目和解决常见问题。
教学目标与要求教材与参考资料01020302 LinuxChapter由Linus Torvalds 于1991年首次发布,至今已广泛应用于服务器、嵌入式设备、超级计算机等领域Linux操作系统基于Unix思想,具有模块化设计、多任务、多用户等特点Linux是一种自由和开放源码的类UNIX操作系统Linux操作系统简介Linux发展历史及现状01020301020304开放源码强大的网络功能高度可定制高稳定性和可靠性Linux 特点与优势应用领域及前景展望服务器领域嵌入式设备超级计算机云计算和大数据03 LinuxChapter虚拟机软件选择与安装虚拟机软件介绍VMware Workstation、VirtualBox等虚拟机软件安装步骤下载、安装、配置虚拟机软件虚拟机网络配置设置虚拟机网络模式,如桥接模式、NAT模式等Linux发行版选择及下载Linux发行版介绍发行版选择建议下载Linux镜像文件系统安装步骤详解创建虚拟机配置虚拟机硬件安装Linux系统安装后配置基本配置与优化建议网络配置设置Linux系统的网络参数,如IP地址、DNS等系统更新与软件安装使用包管理器更新系统、安装常用软件系统优化建议关闭不必要的服务、调整系统参数等,提高系统性能安全配置建议设置防火墙、禁用root远程登录等,提高系统安全性04 LinuxChapterls cd pwdtouch cp mvrm find显示文件内容。
cat文本编辑和处理命令分页显示文件内容。
more/less显示文件的开头/结尾部分。
5G通信技术培训资料大全

其他创新融合应用场景展望
5G+医疗健康
将5G技术应用于远程医 疗、移动医疗、健康监 测等领域,提升医疗服 务水平和健康管理能力 。
5G+教育培训
利用5G网络实现高清在 线教育、虚拟现实/增强 现实(VR/AR)教学等 功能,创新教育培训模 式并提高教育质量。
5G+文化旅游
结合5G网络提供沉浸式 文化体验、智能导览讲 解等功能,丰富文化旅 游内涵并提升游客体验 满意度。
01
独立组网(SA)
全新建设的5G网络,包括新基站、回程链路以及核心网,实现端到端
的5G服务。
02
非独立组网(NSA)
利用4G基础设施,通过升级或扩展现有网络功能来提供5G服务,实现
4G和5G的协同工作。
03
对比分析
独立组网具备更高的灵活性和可扩展性,但建设成本较高;非独立组网
则可利用现有资源快速部署5G服务,但长期来看可能面临技术升级和
关键技术:网络切片与虚拟化
网络切片技术将物理网络划分为多个逻辑网络,满足不 同业务需求
通过网络切片和虚拟化的结合,实现网络资源的灵活调 度和按需分配
虚拟化技术实现网络功能的软件化和硬件资源的池化, 提高资源利用率
降低网络建设和运营成本,促进5G网络的快速部署和 商业化应用
5G无线传输技术详
03
解
推动新能源汽车产业发展。
智慧城市领域应用案例剖析
城市管理与公共服务
利用5G网络实现城市各部门间信息共享与协同管理,提高城市治理 效率和公共服务水平。
智慧安防与应急响应
借助5G网络实现高清视频监控、智能分析预警、快速应急响应等功 能,提升城市安全防范和应急处理能力。
智慧交通与物流配送
控制科学与工程学科发展现状与展望
控制科学与工程学科发展现状与展望作者:刘心刘胜苏丽来源:《科教导刊》2013年第21期摘要文章从控制科学与工程学科的学术领域出发,对我国控制科学与工程学科发展现状按照二级学科分类进行了综述。
针对现有的学科建设,探讨性提出未来发展趋势及展望。
关键词控制科学与工程学科建设自动化中图分类号:G640 文献标识码:A0 引言自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。
采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。
因此,自动化是工业、农业、国防和科学技术现代化的重要条件和显著标志。
自动化是一门涉及学科较多、应用广泛的综合性科学技术。
在我国研究生培养体系中,自动化对应的一级学科“控制科学与工程”下属有七个二级学科:“控制理论与控制工程”、“检测技术与自动装置”、“系统工程”、“模式识别与智能系统”、“导航、制导与控制”、“企业信息化系统与工程”和“生物信息学”。
控制科学与工程对相关学科的发展起到了有力的推动作用,并在学科交叉与渗透中表现出突出的活力。
例如:它与信息科学和计算机科学的结合开拓了知识工程和智能机器人领域。
与社会学、经济学的结合使研究的对象进入到社会系统和经济系统的范畴中。
与生物学、医学的结合更有力地推动了生物控制论的发展。
同时,相邻学科如计算机、通信、微电子学和认知科学的发展也促进了控制科学与工程的新发展,使控制科学与工程学科所涉及的研究领域不断扩大。
1 我国控制科学与工程学科发展现状控制科学与工程学科经过几十年的发展,在诸多方面取得了一些重要的进步,按照二级学科分类,主要发展现状归纳如下。
1.1 控制理论与工程控制理论以动态系统为主要研究对象。
20世纪80年代以来,计算机、网络和通信等信息技术的发展为现有的控制理论提供了广泛的应用空间,同时也带来了巨大的挑战,促使控制理论自身的发展,也催生出新的学科增长点。
数智化背景下“现代控制理论”课程教学改革探索

数智化背景下“现代控制理论”课程教学改革探索目录一、内容简述 (2)1.1 背景与意义 (2)1.2 研究目的与任务 (4)1.3 国内外研究现状综述 (4)二、现代控制理论概述 (6)2.1 现代控制理论的发展历程 (6)2.2 主要内容与特点 (7)2.3 在工业领域的应用 (8)三、数智化背景下的教学改革需求 (9)3.1 数智化环境下的教学挑战 (10)3.2 教学改革的必要性 (11)3.3 教学改革的目标与方向 (12)四、“现代控制理论”课程教学现状分析 (13)4.1 课程设置与教学内容现状 (14)4.2 教学方法与手段现状 (15)4.3 学生学习效果现状 (17)五、教学改革探索与实践 (18)5.1 教学内容与方法的改革 (19)5.1.1 引入案例教学 (20)5.1.2 加强实践教学环节 (21)5.1.3 利用信息技术提升教学效果 (23)5.2 教学资源配置的优化 (24)5.2.1 建设智能化教学平台 (25)5.2.2 整合优质教学资源 (26)5.2.3 提高教师教学能力 (27)5.3 学生学习激励机制的构建 (28)5.3.1 设立创新实践项目 (30)5.3.2 实施个性化教学辅导 (30)5.3.3 建立多元化的评价体系 (31)六、教学改革效果评估与展望 (33)6.1 教学改革效果的初步评估 (34)6.2 教学改革的持续改进策略 (35)6.3 未来发展趋势与展望 (37)七、结论 (38)7.1 研究成果总结 (39)7.2 研究不足与局限性分析 (40)7.3 对后续研究的建议 (41)一、内容简述随着信息技术的快速发展和数字化转型的不断深化,现代控制理论课程面临着新的挑战和机遇。
在数智化背景下,对现代控制理论课程教学改革进行深入探索,具有重要的现实意义。
本次教学改革旨在适应新时代的需求,将传统课程内容与现代技术相结合,培养学生的创新能力和实践技能。
《自动化专业概论》课程教学大纲

《自动化专业概论》课程教学大纲课程代码:ABJD0401课程中文名称:自动化专业概论课程英文名称:IntrodUCtiOntoAutomation课程性质:必修课程学分数:0.5学分课程学时数:8学时授课对象:自动化专业本课程的前导课程:《高中物理》等一、课程简介本课程是一门必修的学科基础课。
开设这门课程目的是让学生尽早了解自动化专业知识研究的范畴、历史起源和应用领域,增强学习的针对性,提高学习兴趣。
通过学习该课程后,让学生熟悉自动控制系统的类型和组成、基本控制方法、控制与自动化技术应用范畴,从而初步达到了解自动化专业开设的目的和意义。
二、教学基本内容和要求1 .自动化的概念和发展简史课程教学内容:控制和自动化的概念,我国古代自动装置和自动化水平以及控制和自动化技术发展简史。
课程的重点、难点:控制和自动化定义,我国古代自动装置的工作原理。
课程教学要求:了解控制和自动化技术发展简史。
理解我国古代自动装置的工作原理。
熟悉控制和自动化的定义。
2 .自动控制系统的类型和组成课程教学内容:恒值自动调节系统,程序自动控制系统,随动系统,自动控制系统的组成,自动化仪表,计算机控制,自动控制等。
课程的重点、难点:恒值自动调节系统、程序自动控制系统和随动系统的特征和定义,自动控制系统的组成,自动控制的概念。
课程教学要求:了解恒值自动调节系统、程序自动控制系统和随动系统的特征和定义。
理解恒值自动调节系统、程序自动控制系统和随动系统的工作原理、计算机控制和自动控制的概念。
掌握自动控制系统的组成结构知识。
3 .基本的控制方法课程教学内容:自动控制系统的行为描述,PID控制,最优控制,自适应控制,智能控制,系统辨识,网络化控制系统。
课程的重点、难点:PID控制、最优控制、自适应控制、智能控制和系统辨识概念和定义。
课程教学要求:了解PID控制、最优控制、自适应控制、智能控制和系统辨识概念。
理解PID控制、最优控制、自适应控制、智能控制和系统辨识的实质。
智能PID控制的发展现状及应用展望

智能PID控制的发展现状及应用展望【摘要】智能PID控制是一种结合了人工智能技术和传统PID控制算法的控制方法。
本文首先介绍了智能PID控制的定义、研究背景和研究意义。
然后通过对智能PID控制的发展历程和关键技术的分析,探讨了其在工业控制和机器人领域的广泛应用。
未来,智能PID控制将朝向更智能化、自适应化和优化化发展。
结合现有发展现状,展望了智能PID控制的应用前景和未来趋势。
智能PID控制在工业控制和机器人领域具有重要意义,是未来控制领域的发展方向之一。
【关键词】智能PID控制、发展现状、应用展望、定义、研究背景、研究意义、发展历程、关键技术、工业控制、机器人、未来发展方向、总结、未来趋势。
1. 引言1.1 智能PID控制的定义智能PID控制是指在传统的PID控制基础上,通过引入先进的智能算法和技术,使控制系统具备了更为智能化的性能和特点。
PID控制是目前工业控制领域应用最为广泛的一种控制方法,它通过比较被控对象的实际输出值与期望输出值之间的差值,再根据比例、积分和微分三个参数来调节控制器的输出,进而实现对被控对象的控制。
而智能PID控制则是在传统PID控制的基础上,结合模糊控制、神经网络、遗传算法等智能算法,使控制系统具备了更强的自适应性、鲁棒性和鲁棒性,能够更好地适应复杂多变的控制环境和要求。
智能PID控制的出现,极大地扩展了PID控制的适用范围和性能,在很多领域都取得了显著的应用效果。
通过智能PID控制算法的不断完善和改进,控制系统的性能和稳定性得到了进一步提升,为工业生产和机器人领域的发展带来了新的机遇和挑战。
随着人工智能和物联网技术的快速发展,智能PID控制将会在更多领域得到广泛应用,并为未来控制技术的发展开辟新的可能性。
1.2 研究背景随着科技的不断发展,智能PID控制技术在工业控制、机器人领域等领域逐渐得到应用和推广。
在传统PID控制技术的基础上,智能PID控制技术通过引入人工智能算法、模糊逻辑控制、神经网络控制等新技术,实现了系统的自适应性、鲁棒性和自学习能力,极大地提高了系统的性能和稳定性。
网络时代灯光控制的现状和展望以及三种协议
2004年12月第15卷 第4期照明工程学报ZH AOMI NG G ONG CHE NG X UE BAODec1 2004V ol115 N o14网络时代灯光控制的现状和展望———“DMX512”、“ACN”和’Art2N et”三种协议浅析陈国义(上海戏剧学院,上海 200040)摘 要:进入21世纪,舞台、演播厅灯光控制技术也进入了网络时代。
原有的DMX512协议标准得到了改进,新的网络协议标准有的正在制定,有的已开始应用。
本文介绍了“DMX512”、“AC N”、“Art2Net”三种协议现状,并对它们进行比较,对它们的前景进行了分析关键词:灯光控制技术;控制网络协议;DMX512;AC N;Art2NetLighting Control in N etw ork E ra:Current Status and OutlookI ntroduction of“DMX512”、“ACN”&“Art2N et”Chen G uoyi(Shanghai Theater Academy,Shanghai 200040)AbstractStepping into the21th century,the lighting control for the stage&studio als o has entered into the netw ork era.The former protocol DMX512has been revised,while s ome of the new netw ork protocols are being drafted, and the others have already been in use.In this article,we will introduce to y ou3protocols,“DMX512”,“AC N”,“Art2Net”,and their current status.Y ou will als o find the com paris on am ong them as well as an outlook for their future development.K ey w ords:lighting control technology;protocols of netw ork control;DMX512;AC N;Art2Net1 前言舞台、演播厅灯光控制的计算机化得益于可控硅和微型计算机两项技术的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
网络控制系统的发展现状及展望有关网络控制系统的发展现状及展望的读书报告1.概述计算机技术和通信技术的飞速发展, 使网络应用在全球范围内日益普及, 并渗透到社会生活的各个领域。
在控制领域,网络已逐渐进入人们的视野,并引领控制系统的结构发生着变化。
通过公用或专用的通信网络来代替传统控制系统中的点对点结构已越来越普遍。
这种通过网络形成闭环的反馈控制系统称为网络控制系统(NCSS)与传统点对点结构的控制系统相比。
NCSS具有成本低、功耗小、安装与维护简便、可实现资源共享、能进行远程操作等优点。
若采用无线网络,NCSS还可以实现某些特殊用途的控制系统,这是传统的点对点结构的控制系统所无法实现的。
NCSS的诸多优点使其在远程医疗、智能交通、航空航天、制造过程以及国防等领域得到了日益广泛的应用。
然而,网络并不是一种可靠的通信介质。
由于网络带宽和服务能力的物理限制,数据包在网络传输中不可避免地存在时延、丢包以及时序错乱等问题。
这些问题是恶化系统性能以及导致NCSS不稳定的重要原因,并且这些问题的存在使传统控制理论很难直接应用于NCSS的分析和设计。
为保证NCSS稳定并具有满意的控制性能,必须深入研究NCSS并发展与其相适应的分析和设计理论。
近年来,NCSS的研究得到了来自控制领域、信号处理领域、以及通讯领域研究人员的共同关注,相关文献层出不穷。
本文力图回顾近年来这一领域的重要成果,总结并指出这一领域下一步的发展方向和有待解决的新课题。
2.网络控制中的基本问题2.1 时延由于网络带宽和服务能力的物理限制,数据包在网络传输中不可避免地存在时延。
网络时延受网络协议、负载状况、网络传输速率以及数据包大小等因素的综合影响,其数值变化可呈现随机、时变等特性。
在NCSS的研究中,时延的数学描述主要采用以下3类模型: 固定时延模型、具有上下界的随机时延模型以及符合某种概率分布的概率时延模型。
2.2 丢包由于网络节点的缓冲区溢出、路由器拥塞、连接中断等原因,数据包在网络传输中会出现丢失现象;丢包受网络协议、负载状况等因素的综合影响,通常具有随机性、突发性等特点。
在NCSS的研究中,丢包的数学描述主要有以下两种方法:1)确定性方法: 该方法通常采用平均丢包率或最大连续丢包量来描述丢包;2)概率方法: 该方法假设丢包满足某种概率分布,如有限状态的Markov过程、Berno分布等,并采用相应的概率模型来描述丢包。
2.3 时序错乱由于数据包传输路径不唯一、且不同路径的传输时延亦不尽相同,数据包到达目的节点的时序可能发生错乱。
数据包的时序错乱是随机性网络时延的衍生现象,因而时序错乱亦能恶化NCSS的控制性能甚至造成系统不稳定。
2.4 单包传输和多包传输以数据包形式传输信息是NCSS有别于传统控制系统的重要特点之一。
根据传输策略不同,NCSS的数据传输分为单包传输和多包传输两种情况。
单包传输是指:传感器和控制将每次待发送信息封装成一个数据包进行传输。
多包传输是指:传感器将每次待发送的采样信号封装成多个数据包进行传输,或者控制器将每次待发送的控制信号封装成多个数据包进行传输。
NCSS之所以采用多包传输策略,一方面可能因为网络数据包的数据位太少,不能承载每次待发送的采样信号或控制信号;另一方面可能因为NCSS具有多个空间分布较广泛的传感器或执行器,必须采用分布传输方式。
此外,NCSS中的基本问题还包括量化效应、执行器饱和、变采样周期等问题。
这些问题已在传统的点对点结构的控制系统中有所涉及并为人们所熟悉,这里不再赘述。
3 网络控制系统的研究现状NCSS研究的起源可以追溯到20世纪80年代后期Luck等人的工作。
自此之后,NCSS的研究逐渐展开。
1999年, Walsh提出了“networked controlsystem”这一概念,很快被国内外学者所接受并沿用至今。
IEEE汇刊于2001年、2004年和2007年相继出版了有关NCSS的专刊,这引起了国内外学者对NCSS的广泛关注,并掀起了NCSS的研究热潮。
到目前为止, NCSS作为一个新兴的研究领域,已成为国内外学术界的前沿方向和研究热点,并取得了一系列研究成果。
3.1 面向控制理论的NCSS研究根据研究思路的不同, 面向控制理论的NCSS研究可分为被动分析方法和主动综合方法。
3.1.1 被动分析方法被动分析方法首先在不考虑网络情况下对控制器进行设计,然后进一步考虑网络影响来分析闭环NCSS的系统性能。
1) 网络摄动法网络摄动法最早由美国学者Walsh提出, 其基本思想是: 将网络对控制系统的影响视为系统摄动,在考虑摄动误差基础上建立NCSS的模型并分析闭环系统的稳定性,最终计算出保证NCSS稳定的最大允许传输间隔和最大允许时延上界。
网络摄动法既可用于线性NCSS, 又可用于非线性NCSS。
然而,该方法通常假设网络仅存在于传感器和控制器之间,并且所得结果往往非常保守,最终导致该方法未被广泛采用。
2) Lyapunov-Krasovskii方法该方法的基本思想是:将具有时延和(或)丢包的NCSS表示为时滞系统,进而利用时滞系统理论中的Lyapunov-Krasovskii方法来分析系统的稳定性,从而确定保证NCSS稳定的网络条件。
例如,Kim基于Lyapunov-Krasovskii方法给出了一种求取最大允许时延上界的方法。
与网络摄动法相比,Lyapunov-Krasovskii方法具有较强的普适性和较低的保守性。
3.1.2 主动设计方法主动设计方法在考虑网络对Less影响基础上进行控制器设计,进而讨论相应的建模、分析以及系统综合等问题。
显然,与较被动分析方法相比,主动设计方法在控制器设计以及系统分析过程中有效利用了网络信息,所得分析结果的保守性更低,所得控制策略也更为合理。
因此, 主动设计方法备受众多学者的青睐,相关成果层出不穷。
1) 时延整形法时延整形法最早由Luck提出,其基本思想是:通过在数据接受端安装缓冲区,使网络时延通过“整形”转化为常值时延,从而将具有时变时延的Less简化为具有常值时延的Less。
显然,该类方法大大简化了Less的分析和设计。
然而,这类方法人为地扩大了时延,所得结果往往具有一定的保守性。
因此,时延整形法从1990年Luck提出后,只有少数学者进行研究,没有得到广泛的推广和应用。
2) 模型控制法模型控制法(model-based control)的基本思想是:当被控对象的采样信号可获得时,控制器利用采样信号来计算控制信号进而控制被控对象(此情形可被视为闭环控制);当被控对象的采样信号不可获得时,控制器则根据被控对象的模型信息和以往的采样信号来估计被控对象的状态,利用估计的被控对象状态来计算控制信号进而控制被控对象。
不难看出,模型控制方法的本质是一种在开环控制和闭环控制之间进行切换的控制方法。
这类方法一般假设网络仅存在于传感器和控制器之间,因而具有一定的局限性。
3) 随机控制方法随机控制方法假设时延或丢包服从某种分布,然后将闭环Less建模成一个随机系统,进而利用随机系统理论对Less进行研究。
其中有代表性的工作包括有关ICCS的早期工作、Million和Thu提出的随机最优控制方法、Wu提出的随机镇定方法、Yang提出的H1控制方法和Hang提出的状态反馈控制方法。
4) Lyapunov-Krasovskii方法该方法的基本思想是:将具有时延和(或)丢包的NCSS表示为时滞系统,然后利用时滞系统理论中的Lyapunov-Krasovskii方法对闭环NCSS进行分析并给出控制器设计方法。
其中有代表性的工作包括Yue提出的状态反馈控制方法、Gao 提出的H1输出跟踪控制方法以及Jiang提出的H1状态反馈镇定方法。
5) 切换控制方法切换控制方法的基本思想是:将NCSS表示为切换系统,然后利用切换系统的理论对闭环NCSS进行分析并给出控制器设计方法。
其中有代表性的工作包括Zhang提出的输出反馈镇定控制方法和Wang提出的H1控制方法。
6) 预测控制方法预测控制的基本思想是:控制器利用被控对象的模型信息和以往的采样信号来估计当前和将来的被控对象的状态信息或输出信息,然后利用估计的信息来控制被控对象,从而达到补偿时延和(或)丢包对NCSS的影响。
其中有代表的工作包括Zhang和Chen提出的基于Smith预估器的控制方法、Liu提出的网络化预测控制方法和Tang提出的变时域预测控制方法。
7) 模糊控制方法鉴于模糊逻辑控制在处理复杂、不确定系统具有独特的优越性,很多学者将模糊逻辑控制应用于NCSS,并取得了一系列研究成果。
其中有代表性的研究工作包括Jiang提出的模糊镇定控制方法和Zhang提出的模糊鲁棒H1控制方法。
8) 其他控制算法除上述方法外,还有一些其他控制方法,如基于网络服务质量(quality of service, 简记为QoS)的增益调度控制方法、基于遗传算法的远程控制器设计方法等。
但这些方法大都缺乏理论支持或尚未形成理论体系。
3.2 面向调度协议的研究NCSS调度协议研究源于通信技术,通过赋予数据包不同优先级来合理配置网络带宽,从而保证NCSS所期望的网络QoS。
根据调度协议性质的不同,NCSS的调度协议研究可分为静态调度协议研究和动态调度协议研究。
1) 静态调度协议研究静态调度协议是指在完全已知调度任务全集及其约束信息情况下设计得到的调度协议。
其中有代表性的工作包括速率单调算法及其改进算法。
RM算法为每一个周期任务指定一个优先级,该优先级按照任务周期的长短顺序排列,任务周期越短,优先级越高。
Zhang提出了改进的RM算法,并将其应用到NCSS中。
相关研究可参见文献及其参考文献。
2) 动态调度协议研究在动态调度协议中,调度任务全集及其约束信息并非完全已知。
动态调度协议需要根据调度任务信息来动态调整调度策略。
其中有代表性的工作包括EDF算法和FCS调度算法。
EDF算法将待发数据按其Deadline来分配优先级,拥有最近截止期限的任务具有最高的优先级。
FCS算法则将反馈控制理论与实时调度理论相结合,通过构造基于反馈控制的调度体系结构来解决不可预测环境下的实时调度问题。
3.3 兼顾控制和网络的NCSs综合研究近年来,兼顾控制和网络的NCSS综合研究亦受到了研究者的广泛关注,并取得了一定的研究成果。
美国学者Walsh提出了TOD/MEF介质访问控制策略,并分析了采用TOD-MEF协议的NCSS的稳定性。
TODMEF协议的基本思想是:当多个节点竞争网络拥有权时,当前误差最大的节点优先传输数据,而所有竞争失败的节点将丢弃本时刻未传数据包。
Ye基于IEEE 802.11无线网标准提出了用于无线NCSS的优先级载波侦听多路存取/冲突避免(P-CSMA/CA)协议来确保数据的实时传输,并进一步分析了采用P-CSMA/CA协议的NCSS的稳定性。