嵌入式实时操作系统ucosII
嵌入式实时操作系统uCOS-II_吴永忠

1.1.1.1嵌入式应用的起源
1946.2.15 ENIAC (Electronic Numerical Integrator And Computer)
长30.48米,宽1米,30个操作台重达30吨 耗电量150千瓦 造价48万美元。 它包含了17,468 真空管,7,200水晶 二极管, 1,500 中转, 70,000 电阻器, 10,000 电容器, 1500继电器,6000多个开关 每秒执行5000次加法或400次乘法,是继电器计 算机的1000倍、手工计算的20万倍。
BC NG
1.1嵌入式系统的基本概念
1.1.1 嵌入式系统的发展概况
1.1.1.1 嵌入式应用的起源 1.1.1.2 计算机技术的分化 1.1.1.3 两大分支的发展方向
1.1.2 嵌入式系统的定义 1.1.3 嵌入式系统的特点
BC NG
1.1嵌入式系统的基本概念
1.1.1 嵌入式系统的发展概况
计算机技术的分化----后PC时代
在早期,由于嵌入式应用范围比较狭窄,大多用于工业控 制领域,人们还可以勉强将通用计算机通过改装、加固、 定制专业软件等方法,嵌入到大型系统中去实现嵌入式应 用,但随着经济、技术的高速发展,嵌入式应用越来越广 泛,已经深入到我们生活中的方方面面,比如:小到彩电、 空调、洗衣机、手机,大到飞机、导弹、汽车等等,嵌入 式应用对计算机的功能、体积、功耗、价格、重量、可靠 性等方面的要求越来越苛刻,通过改造通用计算机的传统 方法远远不能胜任。 因此,嵌入式计算机不得不脱离通用计算机系统走上了独 立发展的道路。这就形成了现代计算机两大分支并行发展 的时期,也称为后PC时代。
在单片机的发展道路上,曾出现过两种探索模式,即“Σ模式”和 “创新模式”。
嵌入式实时操作系统_uCOSII
uC/OS-II北京邮电大学计算机学院 邝 坚 2011年10月教材及参考文献《嵌入式实时操作系统 uC/OS-II(第2 版)》,Jean brosse, 邵贝贝, 北航出版 社, 2003年1月uC/OS-II的主要特点实时性可确定:绝大多数系统服务的执行时间具有可确定 性,不依赖于用户应用程序Task数目的多少。
多任务、独立栈:最多64个Task,基于优先级抢占调度方 式。
每个Task有自身独立的堆栈。
可裁减性:系统最小可裁减到几K到十几K,这种裁减还可 以做到基于函数级。
可移植性:与CPU体系结构相关部分用汇编编写,其他功 能组件CPU无关。
可靠、稳定性:由整个系统设计来保证,市场验证。
美国 联邦航空管理局(FAA)认证。
开源代码:内核约5500行C代码。
可固化:面向嵌入式应用。
系统功能实时内核 任务管理 时间管理 信号量、互斥信号量管理 事件标志组管理 消息邮箱管理 消息队列管理 内存管理 …Targets x86 68k PPC CPU32 i960 SPARC ARM MIPS XScale …Typical development configurationEthernetRS-232Development HostTargetTypical scenario:1. Boot target. 4. Download object module. 2. Attach target server. 5. Test & Debug. 3. Edit & compile. 6. Return to 3 or 1 as necessaryMulti-TaskingTask是代码运行的一个映像,从系统的角 度看,Task是竞争系统资源的最小运行单 元。
Task可以使用或者等待CPU、I/O设备 及内存空间等系统资源,并独立于其它的 Task,与它们一起并发运行。
Task OperationPriority-base preemptive scheduling(基 于优先级的抢占式调度)Task调度器上锁和开锁给调度器上锁函数OSSchedlock() 用于临 时禁止任务调度,直到任务完成后调用给 调度器开锁函数OSSchedUnlock()为止。
第九讲 uCOS-II嵌入式实时操作系统
第九讲 第九讲 系统函数 uC/OS-II 嵌入式实时操作系统
1、uC/OS-II简介 2、系统函数 3、任务组成 4、任务管理 5、时钟和中断 6、内存管理 7、移植方法 8、移植实例
9.2 9.2.1 总体组成 uC/OS-II的系统函数
1)uC/OS-II的组成: 与处理器无关的代码; 与
9.1 uC/OS-II 简介 9.1.3 应用范围
3)uC/OS-II的应用范围 • uC/OS已经移植到了很多CPU上,例如:
AnalogDevices的AD21xx; ARM的ARM7/ ARM9等; Hitachi的64180、H8/3xx和SH系列; Intel的80x86、Pentium、PentiumII、 8051、8052、MCS-251、80196等; Motorola的PowerPC、68K、CPU32、 ColdFire、M.Core、68HC系列; Siemens的80C166和TriCore; TexasInstruments的TMS320等;
9.3 9.3.1 任务组成 uC/OS-II的任务组成
1) 任务组成
9.3 9.3.2 任务状态 uC/OS-II的任务组成
2) 任务的状态:睡眠、就绪、运行、等 待和中断服务5种状态。
9.3 uC/OS-II的任务组成 9.3.3 任务优先级
3)任务的优先级 uC/OS-II 按硬件实时任务的可剥夺型 内核来设计的,因此每个任务必须要有一 个唯一的优先级,用于表明该任务在抢夺 微处理器时所具有的优先权。 uC/OS-II规定应用程序最多包含64个 任务,即最多64个优先级。
9.2 9.2.1 应用相关 uC/OS-II的系统函数
2)应用程序有关的部分 • OS_CFG.H: 配置文件
嵌入式实时操作系统uCOS-II(就绪算法)

OSTCBTbl[1]
OSTCBStkPtr
OSTCBTbl[0]
OSTCBStkPtr
OSTCBNext
OSTCBTbl[2]
OSTCBStkPtr OSTCBNext
OSTCBTbl[n]
OSTCBStkPtr OSTCBNext NULL
OSTCBNext
NULL
20
任务控制块数组与指针
OSTCBFreeList
OSTCBPrioTbl[ ]
[0] [4] [5]
NULL
… &OSTCBTBL[1] &OSTCBTBL[2]
…
[OS_LOEEST_PRIO] &OSTCBTBL[0]
OS_TaskIdle
15
任务控制块数组与指针
OSTCBPrioTbl[
]
任务的优先级资源由操作系统提供,uc/OS-II 有64各优先级,优先级的高低按照编号从0(最高) 到63(最低)排序。由于用户实际使用的优先级的 个数通常少于64个,所以为节约系统资源,可以通 过定义系统常量OS_LOWEST_PRIO的值来限制优 先级编号的范围。
OSTCBTbl[2]
OSTCBStkPtr OSTCBNext
OSTCBTbl[n]
OSTCBStkPtr OSTCBNext NULL
NULL
13
任务控制块数组与指针
OSTCBPrioTbl[
]
任务控制块优先级表,专门用来存放指向各任 务控制块的指针,并按任务的优先级别将这些指针存 放在数组的各个元素里,这样系统在访问一个任务的 任务控制块时,就不必遍历任务控制块链表了。只要 知道任务的优先级,就可以迅速地从该数组中找到它 的任务控制块。
16.嵌入式操作系统uCOS-II

嵌套中断管理
嵌套层数可达255层
主要API
void OSInit(void); //系统初始化 // //启动操作系统
void OSStart(void);
任务管理
INT8U OSTaskCreate(void (*task)(void *pd), void *pdata, OS_STK *ptos, INT8U prio); task:指向任务代码的指针; pdata:指向向任务传递参数的数据结构; ptos: 堆栈指针 prio: 优先级 INT8U OSTaskSuspend(INT8U prio); prio:指定要获取挂起的任务优先级 INT8U OSTaskResume(INT8U prio); prio指定要唤醒任务的优先级.
C/OS-II的主要特点
可移植性和可确定性
绝大部分代码用ANSI C编写 与处理器硬件相关的代码用汇编语言编写 移植条件 移植目标处理器要有硬件堆栈指针 CPU内容寄存器入栈,出栈指令 C编译器支持内嵌汇编或C可扩展,可连接汇编 模块 关中断,开中断可在C语言中实现
C/OS-II的主要特点(续1)
OS_ENTER_CRITICAL() OS_EXIT_CRITICAL() //关中断 //开中断
#define OS_ENTER_CRITICAL() { cpu_sr = INTS_OFF(); } #define OS_EXIT_CRITICAL() { if(cpu_sr == 0) INTS_ON(); }
开关中断的汇编语言程序段
INTS_OFF mrs r0, cpsr ; current CSR mov r1, r0 ; make a copy for masking orr r1, r1, #0xC0 ; mask off int bits msr CPSR_cxsf, r1 ; disable ints (IRQ and FIQ) and r0, r0, #0x80 ; return FIQ bit from original CSR mov pc,lr ; return INTS_ON mrs r0, cpsr ; current CSR bic r0, r0, #0xC0 ; mask on ints msr CPSR_cxsf, r0 ; enable ints (IRQ and FIQ) mov pc,lr ; return
uCOS-II嵌入式操作系统介绍与移植

退出/进入临界区函数 ARMDisableInt/ARMEnableInt
1、直接操作CPSR的I、F位
2、 ARMDisableInt将CPSR的I、F位设置为1, 关闭所有中断
3、 ARMEnableInt将CPSR的I、F位设置为0, 打开中断
任务级上下文切换函数 OS_TASK_SW
ARM处理器相关宏定义
1、退出临界区
#defineOS_ENTER_CRITICAL() ARMDisableInt()
2、进入临界区
#defineOS_EXIT_CRITICAL() ARMEnableInt()
堆栈增长方向
1、堆栈由高地址向低地址增长,这个也 是和编译器有关的,当进行函数调用时, 入口参数和返回地址一般都会保存在当 前任务的堆栈中,编译器的编译选项和 由此生成的堆栈指令就会决定堆栈的增 长方向。 #define OS_STK_GROWTH 1
1、该函数当任务因为被阻塞而主动请求cpu 调度时被执行,由于此时的任务切换都是在 非异常模式下进行的,因此区别于中断级别 的任务切换。 2、它先将当前任务的cpu现场保存到该任务 堆栈中,然后获得最高优先级任务的堆栈指 针,从该堆栈中恢复此任务的cpu现场,使之 继续执行。这样就完成了一次任务切换。
多任务应用程序、调用函数ARMTargetInit初始化ARM处理器; 2、调用OSInit进行操作系统初始化; 3、调用OSTaskCreate函数两个任务:TaskLED 和TaskSEG; 4、调用ARMTargetStart函数启动时钟节拍中断; 5、调用OSStart启动系统任务调度。
OS_CPU_A.S的移植
uCOS II简介
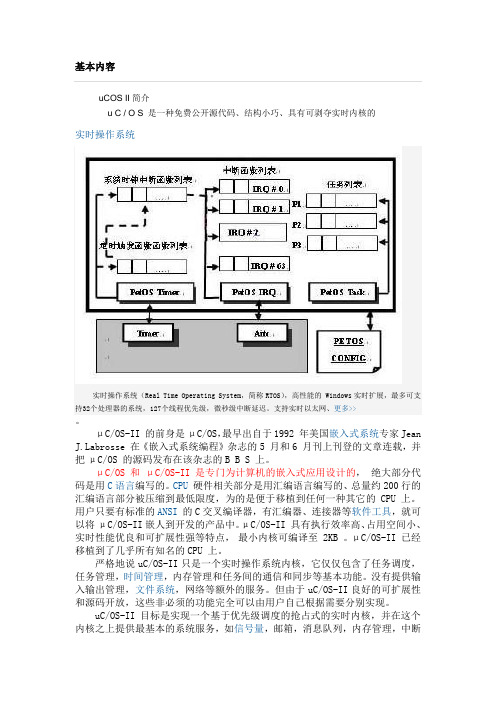
uCOS II简介u C / O S 是一种免费公开源代码、结构小巧、具有可剥夺实时内核的实时操作系统实时操作系统(Real Time Operating System,简称RTOS),高性能的 Windows实时扩展,最多可支持32个处理器的系统,127个线程优先级,微秒级中断延迟。
支持实时以太网、更多>>。
μC/OS-II 的前身是μC/OS,最早出自于1992 年美国嵌入式系统专家Jean brosse 在《嵌入式系统编程》杂志的5 月和6 月刊上刊登的文章连载,并把μC/OS 的源码发布在该杂志的B B S 上。
μC/OS 和μC/OS-II 是专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。
CPU硬件相关部分是用汇编语言编写的、总量约200行的汇编语言部分被压缩到最低限度,为的是便于移植到任何一种其它的CPU 上。
用户只要有标准的ANSI的C交叉编译器,有汇编器、连接器等软件工具,就可以将μC/OS-II嵌人到开发的产品中。
μC/OS-II 具有执行效率高、占用空间小、实时性能优良和可扩展性强等特点,最小内核可编译至 2KB 。
μC/OS-II 已经移植到了几乎所有知名的CPU 上。
严格地说uC/OS-II只是一个实时操作系统内核,它仅仅包含了任务调度,任务管理,时间管理,内存管理和任务间的通信和同步等基本功能。
没有提供输入输出管理,文件系统,网络等额外的服务。
但由于uC/OS-II良好的可扩展性和源码开放,这些非必须的功能完全可以由用户自己根据需要分别实现。
uC/OS-II目标是实现一个基于优先级调度的抢占式的实时内核,并在这个内核之上提供最基本的系统服务,如信号量,邮箱,消息队列,内存管理,中断任务管理uC/OS-II 中最多可以支持64 个任务,分别对应优先级0~63,其中0 为最高优先级。
63为最低级,系统保留了4个最高优先级的任务和4个最低优先级的任务,所有用户可以使用的任务数有56个。
第7章 实时操作系统uCOS-Ⅱ

OSTCBPrev
OSTCBPrev
OSTCBPrev
OSTCBPrev
OSTCBPrev
图7-1 空任务列表
14
本节提要
C/OS-Ⅱ简介 2 C/OS-Ⅱ内核结构 3 4 5 6 7 C/OS-Ⅱ任务管理
1
C/OS-Ⅱ任务通信与同步 C/OS-Ⅱ中断与时间管理
C/OS-Ⅱ应用程序举例
4
C/OS的性能特点(二)
占先式(Preemptive) 多任务 C/OS-II可以管理64个任务,然而,目前这一版本保留8个给系 统。应用程序最多可以有56个任务 可确定性 全部 C/OS-II的函数调用与服务的执行时间具有可确定性 任务栈 每个任务有自己单独的栈, C/OS-II允许每个任务有不同的栈 空间,以便压低应用程序对RAM的需求。 系统服务 C/OS-II提供很多系统服务,例如邮箱、消息队列、信号量、 块大小固定的内存的申请与释放、时间相关函数等。 中断管理 中断可以使正在执行的任务暂时挂起,如果优先级更高的任务 被该中断唤醒,则高优先级的任务在中断嵌套全部退出后立即执 行,中断嵌套层数可达255层。 稳定性与可靠性
19
2.任务创建与删除
创建任务函数利用函数的调用参数为任务分配和初始化相 关的数据结构。首先初始化一个任务控制块,并通过任务控制 块把任务代码和任务堆栈关联起来形成一个完整的任务。 (1)任务创建 µC/OS-Ⅱ通过OSTaskCreate() 或 OSTaskCreateExt()来 建立任务。函数OSTaskCreate()的声明为:
11
Alternate Structure
void YourTask (void *pdata)
第10章 嵌入式实时操作系统UCOS-II(第2版)

第10章从µC/OS 升级到µC/OS-II本章描述如何从µC/OS 升级到µC/OS-II。
如果已经将µC/OS移植到了某类微处理器上,移植µC/OS-II所要做的工作应当非常有限。
在多数情况下,用户能够在1个小时之内完成这项工作。
如果用户熟悉µC/OS的移植,可隔过本章前一部分直接参阅10.05节。
10.0 目录和文件用户首先会注意到的是目录的结构,主目录不再叫\SOFTWARE\uCOS。
而是叫\SOFTWARE\uCOS-II。
所有的µC/OS-II文件都应放在用户硬盘的\SOFTWARE\uCOS-II目录下。
面向不同的微处理器或微处理器的源代码一定是在以下两个或三个文件中:OS_CPU.H, OS_CPU_C.C,或许还有OS_CPU_A.ASM.。
汇编语言文件是可有可无的,因为有些C编译程序允许使用在线汇编代码,用户可以将这些汇编代码直接写在OS_CPU_C.C.中。
与微处理器有关的特殊代码,即与移植有关的代码,在µC/OS 中是放在用微处理器名字命名的文件中的,例如,Intel 80x86的实模式(Real Mode),在大模式下编译(Large Modle)时,文件名为Ix86L.H,Ix86L_C.C,和Ix86L_A.ASM.。
表 L10.1在µC/OS-II中重新命名的文件.新的文件名,这比重新建立一些新文件要容易许多。
表10.2给出来几个与移植有关的新旧文件名命名法的例子。
表L10.2对不同微处理器从µC/OS到µC/OS-II,要重新命名的文件.10.1INCLUDES.H用户应用程序中的INCLUDES.H文件要修改。
以80x86 实模式,在大模式下编译为例,用户要做如下修改:•变目录名µC/OS 为µC/OS-II•变文件名IX86L.H为OS_CPU.H•变文件名UCOS.H为uCOS_II.H新旧文件如程序清单 L10.1和 L10.2所示10.2OS_CPU.HOS_CPU.H文件中有与微处理器类型及相应硬件有关的常数定义、宏定义和类型定义。
嵌入式实时操作系统uCOS-II(高清)
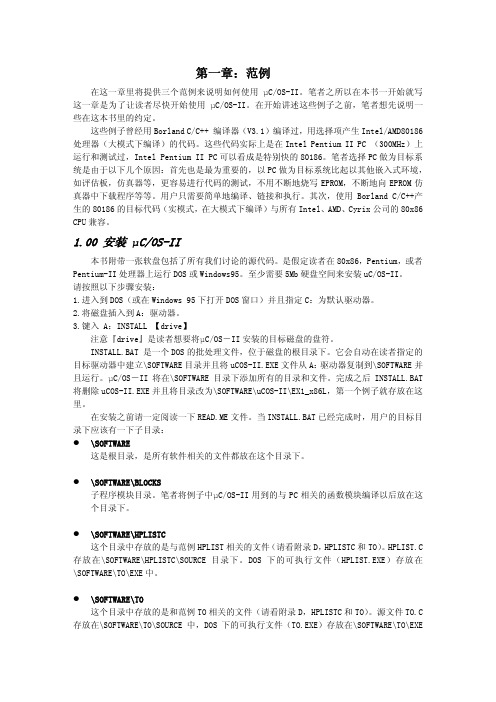
第一章:范例在这一章里将提供三个范例来说明如何使用 µC/OS-II。
笔者之所以在本书一开始就写这一章是为了让读者尽快开始使用 µC/OS-II。
在开始讲述这些例子之前,笔者想先说明一些在这本书里的约定。
这些例子曾经用Borland C/C++ 编译器(V3.1)编译过,用选择项产生Intel/AMD80186处理器(大模式下编译)的代码。
这些代码实际上是在Intel Pentium II PC (300MHz)上运行和测试过,Intel Pentium II PC可以看成是特别快的80186。
笔者选择PC做为目标系统是由于以下几个原因:首先也是最为重要的,以PC做为目标系统比起以其他嵌入式环境,如评估板,仿真器等,更容易进行代码的测试,不用不断地烧写EPROM,不断地向EPROM仿真器中下载程序等等。
用户只需要简单地编译、链接和执行。
其次,使用Borland C/C++产生的80186的目标代码(实模式,在大模式下编译)与所有Intel、AMD、Cyrix公司的80x86 CPU兼容。
1.00 安装 µC/OS-II本书附带一张软盘包括了所有我们讨论的源代码。
是假定读者在80x86,Pentium,或者Pentium-II处理器上运行DOS或Windows95。
至少需要5Mb硬盘空间来安装uC/OS-II。
请按照以下步骤安装:1.进入到DOS(或在Windows 95下打开DOS窗口)并且指定C:为默认驱动器。
2.将磁盘插入到A:驱动器。
3.键入 A:INSTALL 【drive】注意『drive』是读者想要将µC/OS-II安装的目标磁盘的盘符。
INSTALL.BAT 是一个DOS的批处理文件,位于磁盘的根目录下。
它会自动在读者指定的目标驱动器中建立\SOFTWARE目录并且将uCOS-II.EXE文件从A:驱动器复制到\SOFTWARE并且运行。
µC/OS-II将在\SOFTWARE目录下添加所有的目录和文件。
嵌入式实时操作系统ucosii
医疗电子
ucosii在医疗电子领域 中应用于医疗设备、监
护仪、分析仪等。
物联网
ucosii在物联网领域中 应用于传感器节点、网
关、路由器等设备。
02
ucosii的体系结构与内核
任务管理
任务创建
ucosii提供了创建新任务的函数,如 OSTaskCreate(),用于创建新任务。
任务删除
ucosii提供了删除任务的函数,如 OSTaskDelete(),用于删除不再需要的任 务。
时间管理
01
02
03
时间节拍
ucosii通过定时器产生固 定时间间隔的节拍信号, 用于任务调度和时间管理 。
超时处理
ucosii支持超时机制,当 某个任务等待时间超过预 定阈值时触发相应的处理 函数。
时间函数
ucosii提供了一系列时间 函数,如OSTimeDly()、 OSTimeTick()等,用于时 间相关的操作和控制。
智能家居
ucosii适用于智能家居领域,可应用于 智能家电控制、家庭安全监控等场景。
02
03
医疗电子
ucosii适用于医疗电子领域,如医疗设 备控制、病人监控等,其可靠性和实 时性为医疗系统提供了有力保障。
THANKS。
应用软件的开发
任务管理
在UCOSII中,任务是用来实现应用程序功能的。在进行应用软件的开发时,需要创建和管理任务。这包括任务的创 建、删除、挂起和恢复等操作。
任务间通信
为了实现任务间的协同工作,需要进行任务间通信。UCOSII提供了信号量、消息队列、互斥量等机制来实现任务间 通信。在进行应用软件的开发时,需要利用这些机制来实现任务间的同步和数据交换。
uCOSII原理及应用

任务控制块
用于存储任务的运行状态和控制信息,包括任 务的优先级、状态、堆栈指针等。
任务切换函数
用于实现任务之间的切换,包括保存当前任务的上下文和恢复下一个任务的上 下文。
ucosii的任务管理
创建任务
通过调用ucosii提供的函数, 创建新的任务并分配相应的 资源。
在物联网应用中,ucosii能够为各种智能硬件提供统一的操 作系统平台,实现设备的互联互通和智能化管理。同时, ucosii还提供了丰富的中间件和驱动程序,方便开发者快速 开发出各种智能硬件和应用软件。
ucosii在嵌入式系统中的应用
嵌入式系统是指嵌入到硬件中的计算机系统,具有特定的功能和性能要求。ucosii作为一种实时操作 系统,在嵌入式系统中也有着广泛的应用。
调试工具
使用JTAG、SWD等调试工具,通过串口、网络等方式与目标板进行通信,实现程序的 下载、运行、断点设置等操作。
调试步骤
首先确认硬件连接正确,然后通过调试工具将程序下载到目标板中,设置断点并运行程 序,观察程序运行过程中变量的变化和程序的执行流程。
常见问题
硬件连接问题、调试工具配置问题、程序编译错误等。
ucosii的性能分析
性能指标
响应时间、吞吐量、资源利用率等。
分析方法
通过代码审查、性能测试、瓶颈分析等方法,找出影响性能的 关键因素,如算法复杂度、内存访问模式、IO性能等。
优化建议
针对分析结果,提出优化建议,如改进算法、优化数据结 构、减少IO操作等。
ucosii的优化建议
算法优化
通过改进算法,减少计算量和复杂度,提高程序执行效率。
易用性
嵌入式实时操作系统ucosII

嵌入式实时操作系统ucosIIucosII是一款源代码公开、可免费使用的嵌入式实时操作系统。
它是由德国嵌入式系统专家brosse于1992年编写完成的,主要适用于嵌入式系统的开发。
ucosII具有源代码短小精悍、可移植性好、稳定性高等优点,被广泛应用于各种嵌入式系统中。
源代码短小精悍:ucosII的源代码只有几百KB,相对于其他RTOS来说,其代码量较小,易于理解和修改。
可移植性好:ucosII采用了可移植性的设计方法,可以在不同的处理器和编译器上进行移植和优化。
稳定性高:ucosII在各种嵌入式系统中得到了广泛应用,其稳定性和可靠性得到了充分的验证。
支持多任务:ucosII支持多任务处理,可以同时运行多个任务,提高系统的效率和响应速度。
实时性:ucosII具有较高的实时性,可以满足各种实时性要求高的应用场景。
可扩展性:ucosII具有较好的可扩展性,可以根据需要进行功能扩展和优化。
系统内核:包括任务调度、任务管理、时间管理、内存管理等核心功能。
中断处理程序:处理各种中断请求,包括硬件中断、软件中断等。
系统API:提供了一套完善的API函数,方便应用程序的开发和调试。
调试和测试工具:包括各种调试和测试工具,如内存检查工具、性能分析工具等。
ucosII被广泛应用于各种嵌入式系统中,如工业控制、智能家居、智能交通、航空航天等。
其应用场景涵盖了消费类电子产品、医疗设备、通信设备、汽车电子等领域。
ucosII作为一款源代码公开、可免费使用的嵌入式实时操作系统,具有短小精悍、可移植性好、稳定性高等优点。
它广泛应用于各种嵌入式系统中,为应用程序的开发提供了便利和支持。
其可扩展性和实时性也使得它在各种领域中具有广泛的应用前景。
随着嵌入式系统的广泛应用,对嵌入式操作系统的需求也日益增长。
uCOSII是一种流行的实时嵌入式操作系统,具有轻量级、实时性、可扩展性等优点。
本文将介绍如何在AT91平台上实现uCOSII的移植。
基于嵌入式实时操作系统μC-OS-Ⅱ的电池管理系统设计
基于嵌入式实时操作系统μC-OS-Ⅱ的电池管理系统设计随着电子设备的普及和便携性的提高,电池管理系统在现代生活中扮演着越来越重要的角色。
为了满足电池管理系统对实时性、可靠性和高效性的要求,嵌入式实时操作系统μC/OS-Ⅱ成为了一个理想的选择。
本文将介绍一个基于μC/OS-Ⅱ的电池管理系统设计。
首先,我们需要了解电池管理系统的主要功能。
电池管理系统主要负责监测和控制电池的充放电过程,确保电池的安全使用和延长电池寿命。
设计一个高效可靠的电池管理系统是非常重要的。
在本设计中,μC/OS-Ⅱ被选择作为嵌入式实时操作系统。
μC/OS-Ⅱ是一个开源的实时操作系统,具有可裁剪性和可移植性的特点,适用于各种嵌入式系统。
它提供了多任务管理、中断处理、时间管理和资源管理等功能,能够满足电池管理系统对实时性的要求。
在电池管理系统的设计中,任务调度是一个关键的问题。
μC/OS-Ⅱ的任务调度器能够根据任务的优先级和时间片轮转算法来进行任务调度,确保高优先级任务的及时执行。
通过合理设置任务的优先级,可以实现电池状态监测、充放电控制和故障处理等功能。
另外,中断处理也是电池管理系统设计中的重要部分。
电池管理系统需要根据电池的实时状态进行相应的控制和处理。
μC/OS-Ⅱ提供了中断处理的机制,可以及时响应和处理各种中断事件,保证电池管理系统的实时性和可靠性。
此外,时间管理也是电池管理系统设计的重点。
μC/OS-Ⅱ提供了精确的计时和延时功能,能够满足电池管理系统对时间要求的需求。
通过合理设置定时器和时钟,可以实现对电池充放电过程的精确控制和时间记录。
最后,资源管理也是电池管理系统设计的重要环节。
μC/OS-Ⅱ提供了资源管理的机制,可以合理分配和管理系统的各种资源,提高系统的利用率。
在电池管理系统设计中,可以通过μC/OS-Ⅱ的资源管理功能,实现对电池充放电过程中所需资源的管理和分配。
综上所述,基于嵌入式实时操作系统μC/OS-Ⅱ的电池管理系统设计具有实时性、可靠性和高效性的特点。
ucos-ii工作原理
ucos-ii工作原理uC/OS-II(Micro C/Operating System-II)是一种用于嵌入式系统的实时操作系统。
它的工作原理可以简单归纳为以下几个步骤:1. 任务管理:uC/OS-II使用优先级调度算法管理多个任务。
每个任务都有一个优先级,高优先级的任务会优先执行。
uC/OS-II通过一个任务控制块(TCB)来管理每个任务的信息,包括任务的状态、堆栈信息、优先级等。
2. 中断处理:uC/OS-II可以处理多种类型的中断。
当发生中断时,uC/OS-II会根据中断类型进行相应的处理,并且可以自动切换到中断服务程序(ISR)进行执行。
中断服务程序中的代码通常是短小且高效的,用于处理特定的中断事件。
3. 任务切换:uC/OS-II使用抢占式的任务调度方式,因此任务切换可以发生在任何时刻。
当一个任务的时间片用尽或者有更高优先级的任务需要执行时,uC/OS-II会保存当前任务的上下文信息,并切换到下一个任务的执行。
任务切换时,uC/OS-II会保存当前任务的栈指针等信息,并从下一个任务的栈指针中恢复相应的上下文,以使下一个任务继续执行。
4. 事件同步:uC/OS-II提供了多种事件同步机制,如信号量、事件标志、消息邮箱等,用于任务之间的同步和通信。
这些机制可以帮助任务之间按照一定的顺序进行执行,实现数据共享和互斥访问等功能。
5. 内存管理:uC/OS-II提供了内存管理功能,可以动态分配和释放内存块。
这种内存管理机制可以帮助节省内存空间,提高系统的效率。
总而言之,uC/OS-II通过任务管理、中断处理、任务切换、事件同步和内存管理等机制,实现了对嵌入式系统的实时调度和资源管理,以提供稳定、可靠的操作系统支持。
嵌入式实时操作系统uCOSⅡ分析
中间层
BSP/HAL 硬件抽象层/板极支持包
D/A
A/D 硬件层
I/O
嵌入式 微处理器
通用接口 ROM
SDRAM
人机交互接口
嵌入式计算机系统 3
硬件抽象层的引入
嵌入式实时系统自底向上包含三个部分
硬件环境 嵌入式实时操作系统——RTOS 嵌入式实时应用程序
由于嵌入式系统应用的硬件环境差异较大 新增加的中间层位于操作系统和硬件之间,
HAL简介
硬件抽象层பைடு நூலகம்HAL)是体系结构相关的底层程序 处理系统启动、硬件初始化以及中断与异常 硬件抽象层对内核其它部分提供统一的调用接口 HAL可以提供BSP规范,提供跨平台可移植性
6
硬件抽象层接口定义和代码设计特点
硬件抽象层具有与硬件密切相关性 硬件抽象层具有与操作系统无关性 接口定义的功能应包含硬件或系统所需硬件支
25
C/OS-II开关中断的方法(续2)
{ .. OS_ENTER_CRITICAL( ); /* C/OS-II临界段代码*/ OS_EXIT_CRITICAL( ); ..
}
如果在所有挂起类(PEND)调用之前,如:调用OSTimeDel() (挂起时间)功能函数之前关中断,会出现什么现象?
以及基于网络元素NE的甚高端通讯设备 基于智能手机的硬件抽象层,能够支持以Intel PCA体系结构为内核的
智能手机、以Intel EIA体系结构为内核的智能手机,以及以Motorola 的88000系列为内核的PDA 基于IC卡的汇编级硬件抽象层,能够支持数字电视条件接收CA的 8/16/32位CPU IC设计和机器码级汇编抽象层
15
C/OS的性能特点(一)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
学习嵌入式操作系统
学习一种实时操作系统RTOS,如uc/OS,掌握实时系统的 概念和设计方法;
嵌入式系统以应用为中心,应用时选择“适用”的操作系 统;
知道如何剪裁操行系统; 嵌入式Linux、eCos; 自己“写”RTOS——一种学习态度; 由于嵌入式系统自身的特点,采用的程序设计语言是汇编
许多早期的嵌入式系统开发者认为嵌入式系统不需要操作系统,但现在除了 最简单的系统外,越来越多的嵌入式系统都引入了操作系统,比如中断驱动系统 在引入嵌入式操作系统之后,系统的可靠性、安全性、可扩展性、功能性、灵活 性、可管理性都大大提高。当然,我们这里所讲的嵌入式操作系统不一定是UcOS、 VxWorks、WinCE、Linux等通用产品,也包括开发者自己编写的专用嵌入式操作 系统。
语言、C/C++语言、JAVA语言。所用的编译器应与处理 器相适应。
11
RTOS在嵌入式系统中的位置
应用
FS C/C++ 设备驱动
RTOS
KERNEL 调试工具
其它组件 TCP/IP 设备I/O
BSP(板级支持包) 嵌入式硬件平台
12
第二讲 C/OS –II及任务
µC/OS-II的特点 µC/OS-II文件结构与内核 µC/OS-II任务及其存储结构 µC/OS-II任务控制块与任务堆栈 µC/OS-II系统的任务、空闲任务与统计任务
实时嵌入式操作系统的种类繁多,大体上可分为两种,商用型和免费型。 商用型的实操作系统功能稳定、可靠,有完善的技术支持和售后服务,但往往
价格昂贵,如Vxworks、QNX、WinCE、Palm OS等。 免费型的实时操作系统在价格方面具有优势,目前主要有Linux、eCos和
μC/OS-Ⅱ,稳定性与服务性存在挑战。 μC/OS-Ⅱ得到了美国航空管理局的认证,可用在飞行器上。这说明μC/OS-
3
嵌入式实时操作系统
在这些嵌入式操作系统中封装了越来越多的功能,除了对任务的切换、调度、通 信、同步、互斥、中断管理、时钟管理等,还可进一步封装内存管理、网络通讯协 议、文件管理等功能,这些功能可以根据需要进行裁减。Linux正是由于其源代码 开放,可以使开发者根据自己的需要进行裁剪而受到开发者的青睐。 1.2.1 计算机实时操作系统
13
第一节 C/OS的性能特点(一)
公开源代码
可移植性(Portable)
绝大部分C/OS-II的源码是用移植性很强的ANSI C写的。和微处理器硬件相 关的那部分是用汇编语言写的。汇编语言写的部分已经压到最低限度,使得 C/OS-II便于移植到其他微处理器上。 C/OS-II可以在绝大多数8位、16位 、32位以至64位微处理器、微控制器 、数字信号处理器(DSP)上运行。
嵌入式操作系统基础
——C/OS-Ⅱ
1
“嵌入式操作系统基础”课程内容
1 嵌入式实时操作系统 2 C/OS-Ⅱ操作系统及任务 3 C/OS-Ⅱ的任务管理 4 C/OS-Ⅱ的初始化、启动 5 C/OS-Ⅱ的中断、时钟及时间管理 6 C/OS-Ⅱ任务通信与同步 7 C/OS-Ⅱ内存管理 8 C/OS-Ⅱ的移植
9 基于C/OS-Ⅱ应用的开发
2
第一讲 嵌入式实时操作系统
第一节 嵌入式系统
目前国内一个普遍被认同的定义是:以应用为中心、以计算机技术为基础,软件 硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用 计算机系统。而这专用计算机系统是嵌入到对象中。只见对象,不见计算机。
如图1.1、1.2、1.3、1.4 所示。
实时操作系统首要特点是实时性。为此: ⑴ 实时操作系统必须是多任务的。 ⑵ 实时操作系统内核应该是可剥夺型的。
4
图 1.1
图 1.2
图 1.3
7
图 1.4
8
关于内核应该是可剥夺型的
这种可剥夺性表现为:一个在运行的进程可被另一个进程剥夺其在CPU的运行权; 另一方面,被剥夺运行权的进程,一旦再次获得运行时,能够正确无误运行,得到 正确结果。为此,编译器、程序设计都要保证这点。
可固化(ROMable)
C/OS-II是为嵌入式应用而设计的,这就意味着,只要读者有固化手段(C编 译、连接、下载和固化), C/OS-II可以嵌入到读者的产品中成为产品的一 部分。
可裁剪(Scalable)
可以只使用C/OS-II中应用程序要的那些系统服务。也就是说某产品可以只 使用很少几个C/OS-II调用,而另一个产品则使用了几乎所有C/OS-II的功 能,这样可以减少产品中的C/OS-II所需的存储器空间(RAM和ROM)。这 种可剪裁性是靠条件编译实现的。
14
C/OS的性能特点(二)
① 可重入函数
② 不可重入的函数
viod strcpy(char *dest,char *src)int Temp;
{
void swap(int *x , int *y)
while(*dest++ = *src++) {
{
;
Temp = *x;
}
*x = *y;
*dest = NULL;
*y = Temp;
}
}
对于含有不可剥夺的函数的进程是不剥夺的。
⑶ 进程调度的延时可预测并尽可能小
⑷ 系统提供的服务时间可预知.
9
嵌入式实时操作系统
⑸ 中断延时尽可能小。否则影响高优先级进程的执行。
1.2.2 嵌入式实时操作系统
嵌入式系统是嵌入到某一对象中的专用计算机,它所占用的空间和所需的能源十分有 限,甚至是苛刻的。这就要求操作系统是可剪裁的。对于不同的应用对象,必须剪裁 掉与其无关的部分。这样嵌入式系统不但是实时的,而且是可剪裁的。这点与通用操 作系统是不同的.
这个专用计算机系统承担对象的数据处理和对象各部件运动的控制。随着大规模 集成电路的发展、嵌入式软件工程的发展,嵌入的对象越来越广泛。
第二节 嵌入式实时操作系统
正如通用计算机系统,有很多软、硬件资源需要一个操作系统来管理,并提 供用户一个良好的程序运行的环境。同样,作为嵌入式系统—专用计算机也需要 一个操作系统。这个操作系统必须是实时的、嵌入式的。