modelling_the_wireless_propagation_channel_a
Autodesk Nastran 2023 参考手册说明书
FILESPEC ............................................................................................................................................................ 13
DISPFILE ............................................................................................................................................................. 11
File Management Directives – Output File Specifications: .............................................................................. 5
BULKDATAFILE .................................................................................................................................................... 7
simulink中model reference的用法 -回复
simulink中model reference的用法-回复Simulink中的Model Reference是一个非常强大且常用的功能,它允许用户在一个模型中嵌入另一个模型,从而使得系统的设计和开发更加模块化、可维护和可扩展。
在本文中,我们将逐步介绍Simulink中Model Reference的用法,并提供实例来帮助读者更好地理解。
Model Reference的概念和作用Model Reference是指在一个主模型中嵌入一个或多个子模型的设计方法。
在Simulink中,主模型通常被称为父模型或顶层模型,子模型则是在顶层模型中使用的模块化组件。
Model Reference的好处主要有以下几个方面:1. 模块化开发:通过使用Model Reference,用户可以将复杂系统分解为更小、更易于管理的模块,使得系统的开发和维护变得更加简单和高效。
2. 可重用性:子模型可以重复使用,减少系统设计中的重复劳动,并提高代码的可维护性和可扩展性。
3. 团队协作:不同的团队成员可以独立开发和测试不同的子模型,从而提高团队的并行开发能力和协同工作效率。
Model Reference的使用步骤下面将介绍在Simulink中使用Model Reference的具体步骤。
步骤一:创建子模型在使用Model Reference之前,首先需要创建子模型。
可以将子模型定义为独立的模型文件,也可以在主模型中创建子系统,并将其转换为子模型。
子模型可以包含各种Simulink模块和功能,例如信号处理算法、控制逻辑和状态机等。
确保子模型在单独的命名空间中工作,以避免可能的变量名称冲突。
步骤二:在主模型中添加Model Reference Block一旦子模型创建完成,下一步是在主模型中添加Model Reference Block。
这可以通过在Simulink库浏览器中找到Model Reference Block,然后将其拖放到主模型中完成。
ASAAC通用功能模块规范

Ministry of DefenceInterim Defence Standard 00-76 Issue 1 Publication Date 14 January 2005ASAAC StandardsPart 1Proposed Standards for CommonFunctional ModulesNOTEThis standard is ProvisionalIf you have Difficulty with itsApplicationPlease Advise UK DefenceStandardizationAMENDMENT RECORDAmd No Date Text Affected Signature and DateREVISION NOTEHISTORICAL RECORDDefenceM R C. S IMS TANDARDS P ROGRAMME M ANAGER 2Procurement AgencyD/DStan/21/76/1UK Defence StandardizationRm 1138Kentigern House65 Brown StreetGlasgow G2 8EXDirect line:0141 224 2585Switchboard:0141 224 2531Facsimile:0141 224 2503e-mail:pdgsts1@14 December 2004INTERIM DEFENCE STANDARD - INVITATION TO COMMENTDefence Standard Number: 00-76 Part 1 Issue 1 INTERIMTitle: Standards for Common Functional ModulesThe above Defence Standard has been published as an INTERIM Standard and is provisional because it has not been agreed by all authorities concerned with its use. It shall be applied to obtain information and experience on its application which will then permit the submission of observations and comments from users.The purpose of this form therefore is to solicit any beneficial and constructive comment that will assist the author and/or working group to review the INTERIM Standard prior to it being converted to a normal Standard.Comments are to be entered below and any additional pertinent data which may also be of use in improving the Standard should be attached to this form and returned to writer at the above address.No acknowledgement to comments received will normally be issued.NAME: Calum Sim SIGNATURE: Calum Sim BRANCH: STAN OPS SPM 21. Does any part of the Standard create problems or require interpretation:YES NO If “yes” state under section 3:a. the clause number(s) and wording;b. the recommendation for correcting the deficiencies.2. Is the Defence Standard restrictive:YES NO If “yes” state in what way under section 3.AN EXECUTIVE AGENCY OF THE MINISTRY OF DEFENCE3. Comments, general or any requirement considered too rigid:Page Clause Comments Proposed Solution4. I/We agree that this Draft Standard, subject to my/our comments being taken into consideration, when published in final form will cover my/our requirements in full. Should you find my/our comments at variance with the majority, I/we shall be glad of the opportunity to enlarge upon them before final publication. Signature.................................................................Representing.................................................Submitted by (print or type name and address)Telephone number:Date:Our Ref:DSTAN Form 42INTERIM DEF STAN 00-76 PART 1Contents0Introduction (5)0.1Purpose (5)0.2Document structure (5)1Scope (7)1.1Relationship with other ASAAC Standards (7)2WARNING (7)3Normative references (8)4Terms, definitions and abbreviations (9)4.1Terms and definitions (9)4.2Abbreviations (9)4.3Conventions used in this Standard (11)4.3.1Special Fonts (11)4.3.2Naming Conventions (11)5CFM Definition (12)5.1Generic CFM (12)5.1.1Generic CFM – Description (12)5.1.2Generic CFM – Requirements (14)5.2Module Support Unit (15)5.2.1Module Support Unit – Description (15)5.2.2Module Support Unit – Requirements (15)5.2.3Module Support Layer (18)5.2.4Module Initialisation (19)5.3Module Processing Capability (22)5.3.1Data Processing Module (DPM) (24)5.3.2Signal Processing Module (SPM) (24)5.3.3Graphic Processing Module (GPM) (25)5.3.4Mass Memory Module (MMM) (26)5.3.5Power Conversion Module (PCM) (27)5.3.6Network Support Module (NSM) (29)5.4Network Interface Unit (NIU) and Routing Unit (RU) (30)5.4.1NIU and RU Description (30)5.4.2NIU and RU Requirements (31)5.5Module Power Supply Element (31)5.5.1Module Power Supply Element Description (31)5.5.2Module Power Supply Requirements (32)5.6Module Physical Interface (MPI) (32)5.6.1MPI Description (32)5.6.2MPI Requirements (32)6Common Functional Module Interfaces (32)6.1Module Logical Interface (MLI) (32)6.1.1MLI Description (32)6.1.2MLI Requirements (33)6.2Module Physical Interface (MPI) (33)6.2.1MPI Description (33)6.2.2MPI Requirement (33)6.3MOS Interface (33)6.3.1MOS Interface Description (33)6.3.2MOS Interface – Requirement (34)7CFM System Support and Guidelines (34)7.1Fault Management (34)7.2Fault Detection (34)7.3Fault Masking (34)7.4Fault Confinement (35)7.5Safety and Security (35)7.5.1Safety35iiiINTERIM DEF STAN 00-76 PART 17.5.2Security (35)A.1.Data Processor Module (37)A.2.Signal Processing Module (38)A.3.Graphic Processing Module (39)A.4.Mass Memory Module (40)work Support Module (40)A.6.Power Conversion Module (41)FiguresFigure 1 - ASAAC Standard Documentation Hierarchy (5)Figure 2 - Functional representation of a generic CFM (14)Figure 3 - IMA Common Functional Modules – Graphical Composition (24)Figure 4 - The Power Supply Distribution functions of the PCM (29)Figure 5 - Power Supply Element functions (32)Figure 6 - Software Architecture Model - Three Layer Stack (35)TablesTable 1 - CFM Embedded Information - Read Only (16)Table 2 - CFM Embedded Information - Read / Write (18)Table 3 - PCM output characteristics (30)Table 4 - PSE input voltage characteristics (33)Table A-1 - Performance sheet for a DPM (39)Table A-2 - Performance sheet for a SPM (40)Table A-3 - Performance sheet for a GPM (41)Table A-4 - Performance sheet for a MMM (42)Table A-5 - Performance sheet for a NSM (42)Table A-6 - Performance sheet for a PCM (43)ivINTERIM DEF STAN 00-76 PART 11Introduction 0.1 PurposeThis document is produced under contract ASAAC Phase II Contract n°97/86.028.The purpose of the ASAAC Programme is to define and validate a set of open architecture standards,concepts and guidelines for Advanced Avionics Architectures (A3) in order to meet the three main ASAAC drivers. The standards, concepts and guidelines produced by the Programme are to be applicable to both new aircraft and update programmes from 2005.The three main goals for the ASAAC Programme are:1. Reduced life cycle costs.2. Improved mission performance.3. Improved operational performance.The ASAAC standards are organised as a set of documents including:- A set of agreed standards that describe, using a top down approach, the Architecture overview to allinterfaces required to implement the core within avionics system.-The guidelines for system implementation through application of the standards.The document hierarchy is given hereafter: (in this figure the document is highlighted)Figure 1 - ASAAC Standard Documentation HierarchyINTERIM DEF STAN 00-76 PART 120.2 Document structureThe document contains the following sections:-Section 1, scope of the document.-Section 2, normative references.-Section 4, the terms, definitions and abbreviations.-Sections 5 and 6 provide CFM concept definition, requirements and standards.-Section 7 provides guidelines for implementation of standards.- Performance sheets for each of the CFMs are attached to the end of the document. These sheetscontain a list of attributes to be defined by the system designer and used by the CFM provider.INTERIM DEF STAN 00-76 PART 131 ScopeThis standard defines the functionality and principle interfaces for the Common Functional Module (CFM) to ensure the interoperability of Common Functional Modules and provides design guidelines to assist in implementation of such a CFM. It is one of a set of standards that define an ASAAC (Allied Standard Avionics Architecture Council) Integrated Modular Avionics System.This definition of interfaces and functionality allows a CFM design that is interoperable with all other CFM to this standard, that is technology transparent, that is open to a multi-vendor market and that can make the best use of COTS technologies.Although the physical organisation and implementation of a CFM should remain the manufacturer’s choice,in accordance with the best use of the current technology, it is necessary to define a structure for each CFM in order to achieve a logical definition of the CFM with a defined functionality. This definition includes:- The Generic CFM, which defines the generic functionality applicable to the complete set of CFMs. Thegeneric functionality is defined in section 5.1.- The processing capability, which defines the unique functionality associated with each CFM type within the set. This functionality is defined in section 5.3.- The logical and physical interfaces that enable CFMs to be interoperable and interchangeable, these are defined in section 6.-The functionality required by a CFM to support the operation of the System is defined in section 7.1.1 Relationship with other ASAAC StandardsThe definition of the complete CFM is partitioned and is covered by the following ASAAC standards:-CFM Mechanical properties and physical Interfaces – ASAAC Standards for Packaging.-CFM Communication functions – ASAAC Standards for Software.-CFM Network interface – ASAAC Standards for Communications and Network.-CFM Software architecture – ASAAC Standards for Software.- CFM Functional requirements – This document.2 WARNINGThe Ministry of Defence (MOD), like its contractors, is subject to both United Kingdom and European laws regarding Health and Safety at Work, without exemption. All Defence Standards either directly or indirectly invoke the use of processes and procedures that could be injurious to health if adequate precautions are not taken. Defence Standards or their use in no way absolves users from complying with statutory and legal requirements relating to Health and Safety at Work.INTERIM DEF STAN 00-76 PART 13 Normative references3.1The publications shown below are referred to in the text of this Standard. Publications are grouped and listed in alphanumeric order.This European Standard incorporates by dated or undated reference, provisions from other publications. These normative references are cited at the appropriate places in the text and the publications are listed hereafter. For dated references, subsequent amendments to or revisions of any of these publications apply to this European Standard only when incorporated in it by amendment or revision. For updated references the latest edition of the publication referred to applies (including amendments).A) References to published standards[1] ISO/CD 1540Aerospace - Characteristics of aircraft electricalsystems - ISO/TC20/SC 1/WG 13 - Date: 20/04/1998B) References to standards in preparation[2] ASAAC2-STA-32410-001-SWG Issue 01Final Draft of Proposed Standards for Software1[3] ASAAC2-STA-32420-001-HWG Issue 01Final Draft of Proposed Standards forCommunications/Network1[4] ASAAC2-STA-32440-001-HWG Issue 01Final Draft of Proposed Standards for Packaging1[5] ASAAC2-GUI-32450-001-CPG Issue 01Final Draft of Proposed Guidelines for System Issues –Volume 2: Fault Management1[6] ASAAC2-STA-32460-001-CPG Issue 01Final Draft of Proposed Standards for Architecture1C) References to other documents[7] The Common Object Request Broker Architecture and Specification, Issue 2.3, OMG2[8] ASAAC2-GUI-32450-001-CPG Issue 01Final Draft of Proposed Guidelines for System Issues –Volume 5: Time ManagementD) References to documents from other organisations[9] IEEE Std JTAG 1149.1 Boundary Scan33.2Reference in this Standard to any related document means in any Invitation to Tender or contract the edition and all amendments current at the date of such tender or contract unless a specific edition is indicated.3.3In consideration of clause 3.2 above, users shall be fully aware of the issue and amendment status of all related documents, particularly when forming part of an Invitation to Tender or contract. Responsibility for the correct application of standards rests with users.3.4DStan can advise regarding where related documents are obtained from. Requests for such information can be made to the DStan Helpdesk. How to contact the helpdesk is shown on the outside rear cover of Def Stans.1 Published by: Allied Standard Avionics Architecture Council2 Published by: Object Management Group3 Published by: IEEE44 Terms, definitions and abbreviations4.1 Terms and definitionsUse of “shall”, “should” and “may” within the standards observe the following rules:- The word SHALL in the text expresses a mandatory requirement of the standard.- The word SHOULD in the text expresses a recommendation or advice on implementing such a requirement of the standard. It is expected that such recommendations or advice will be followed unless good reasons are stated for not doing so.- The word MAY in the text expresses a permissible practice or action. It does not express a requirement of the standard.Open System: A system with characteristics that comply with specified, publicly maintained, readily available standards and that therefore can be connected to other systems that comply withthese same standards.4.2 Abbreviations2D Two Dimensional3D Three DimensionalA3Advanced Avionics ArchitectureAGT Absolute Global TimeALT Absolute Local TimeAPOS Application to Operating System InterfaceASAAC Allied Standard Avionics Architecture CouncilBIT Built-in TestCBIT Continuous BITCFM Common Functional ModuleCORBA Common Object Request Broker ArchitectureCOTS Commercial Off The ShelfCRC Cyclic Redundancy Checkdc Direct CurrentDPM Data Processing ModuleDSP Digital Signal ProcessorEDAC Error Detection And CorrectionFFT Fast Fouriert TransformationFIR Finite Impulse response FilterFMECA Fault Mode Effect and Criticality AnalysisGPM Graphic Processing ModuleGSM Generic System ManagementHW HardwareHDD Head-Down DisplayHMD Helmet Mounted DisplayHUD Head-Up DisplayIBIT Initiated BITID IdentificationIDL Interface Definition LanguageIEEE Institute of Electrical and Electronics Engineers IFFT Inverse Fast Fourier TransformationIMA Integrated Modular AvionicsISO International Standards OrganisationITM Integrated Test and MaintenanceJTAG Joint Test Action GroupMC Module ControllerMIS Module Initialisation SupportMLI Module Logical InterfaceMMM Mass Memory ModuleMOS Module Support Layer to Operating System Interface MPI Module Physical InterfaceMSL Module Support LayerMSU Module Support UnitMTP Maintenance Test PortN/A Not ApplicableNIU Network Interface UnitNSM Network Support ModuleOMG Object Management GroupO/P OutputOS Operating SystemOSL Operating System LayerPBIT Power-up / power-down BITPCM Power Conversion ModulePCU Power Conversion UnitPE Processing ElementPMS Power Management SystemPSA Power Switch ArrayPSE Power Supply ElementPU Processing UnitRC Reference ClockRLT Relative Local TimeRTBP Runtime BlueprintsRU Routing UnitSPM Signal Processing ModuleTC Transfer ConnectionTLS Three Layer StackVdc Voltage dc4.3 Conventions used in this StandardThe Interface Definition Language (IDL) as defined in the Common Object Request Broker Architecture (CORBA) 2.3 is used to express the MOS services as programming language independent services in this document. Fore more details refer to [7] .The conventions used in this document are as follows:4.3.1 Special FontsWords that have a special meaning appear in specific fonts or font styles. All code listings, reserved words and the name of actual data structures, constants, and routines are shown in Courier.4.3.2 Naming ConventionsParameter and variable names contain only words with lower case letters, which are separated by underscore.Example:vc_messageNOTE: Upper and lower case letters are treated as the same letter.5 CFM DefinitionThe Common Functional Modules (CFMs) are line replaceable items and provide an ASAAC IMA system with a computational capability, network support capability and power conversion capability. The following set of modules have been defined for use within an IMA core processing system:- Signal Processing Module (SPM).- Data Processing Module (DPM).- Graphics Processing Module (GPM).- Mass Memory Module (MMM).- Network Support Module (NSM).- Power Conversion Module (PCM).This set of CFMs complies with the generic CFM format defined in this section.It is assumed that a System Design Specification will be raised for each specific project implementation in which the detailed performance requirements for each CFM will appear.5.1 Generic CFM5.1.1 Generic CFM – DescriptionThe internal architecture of each CFM consists of a set of functional elements that are applied to each CFM implementation. These are shown graphically in Figure 2 and are detailed below. All functions, with the exception of the Processing Unit, are generic to each CFM type.PowerLinks to NetworkFigure 2 - Functional representation of a generic CFM(For PCM and NSM refer to Figure 3)- The Module Support Unit (MSU) controls and monitors the module and provides common functions such as Built-in-Test (BIT) control, module initialisation, time management, status recording/reporting and support for MLI (section 6), system management and debugging.- The Processing Unit (PU) provides the specific function of a CFM, for example data processing, signal processing, mass storage. These are defined in section 5.3.- The Module Physical Interface (MPI) defines the physical characteristics of the module and implements the mechanical, optical, electrical and cooling interfaces. These are detailed in section 6 and are fully defined in the ASAAC Standards for Packaging [4] .- The Routing Unit (RU) provides the internal communications capability of the CFM and interconnects the Network Interface Unit (NIU) with the Processing Unit (PU) and the Module Support Unit (MSU). The RU also provides a direct coupling between a network input link and a network output link. The RU iscontrolled by the MSU.- The Network Interface Unit (NIU) performs the external communications capability by interfacing the off-module network with the module internal data paths implemented by the Routing Unit. The NIU supports the implementation of the communication part and the Network properties part of the Module Logical Interface (MLI). These are defined in the ASAAC Software Standard [2] and the ASAAC Standards for Communications and Network [3] respectively. It also supports network configuration in conjunction with the MSU.- The Power Supply Element (PSE) converts the external supply voltage into the appropriate internal supply voltages. Consolidation of redundant multiple power inputs shall also be provided by the PSE.The power supply architecture is defined in the ASAAC Standards for Architecture [6] .The CFM shall comprise hardware components, that implement the mechanical and electrical functionality and the physical interfaces of the CFM and software components collectively termed the “Module Support Layer” (MSL). The MSL provides, in conjunction with the hardware, the functional requirements and logical interfaces defined in the ASAAC Standards identified in section 1.1.The interfaces for the CFM are as follows and are detailed in section 6:- The Module Physical Interface (MPI), which defines the physical properties of the CFM including the mechanical, optical, electrical and cooling interfaces.- The Module Logical Interface (MLI), which defines the logical communication and command interface of the CFM.- The interface between the Module Support Layer (MSL) and the Operating System, the MOS, which provides generic, technology independent access to the low-level resources of a CFM and thecommunications interface to the other CFMs.5.1.2 Generic CFM – RequirementsAll CFMs designed to this standard shall meet the following requirements:- Have all set of functional elements as shown in Figure 2 for DPM, SPM, MMM and GPM. For PCM and NSM refer to Figure 3.- Provide open system (see for definition 4.1) compliant processing hardware,- Promote insertion and use of commercial and military standards and technologies, and the reuse of software.- Provide integrated diagnostics (built-in test) and fault isolation means to support fault tolerance, failure management, reconfiguration and maintenance.- Conform to the Module Physical Interface (MPI) definition [4] and section 5.6.- Support at least one input and one output link to the network. The number of links will be dependent on the module type and system implementation.- Comply with the MOS interface definition and provide the required supporting software in the MSL. This software must also meet the requirements defined in the ASAAC Standards for Software [2] . The NSM is exempt from this requirement.- Provide the common communication services, within the MOS interface, to allow access to the network resources [2] .- Comply with the MLI definition. Note, that the NSM shall comply to the appropriate sub-set [2] .- Be programmable in high-level languages.- Time synchronisation, for more details see reference [8] . Note that the NSM and MMM have additional time distribution capability.- Ensure internal communication bandwidth is compatible with external communication.- Comply with the Power Supply Architecture Specified in the ASAAC Standards for Architecture [6] : - Provide the second stage of the power supply architecture.- Be capable of operating in a fault tolerant configuration, i.e. it shall be possible to consolidate power supplies of a CFM (with the exception of the PCM) from two or more PCMs.5.2 Module Support UnitThis section covers the generic functionality provided by the MSU.5.2.1 Module Support Unit – DescriptionThe module support functionality is to be provided by the logical element the MSU. The MSU controls and monitors all activities for a DPM, SPM, GPM and MMM. The MSU provides all functions and services required for system management, external and internal communications and module management. Guidelines for these functions are provided in the ASAAC Standards for Software [2] . In order to achieve the flexibility to control different types of modules a general-purpose processor called a Module Controller (MC) may be used.5.2.2 Module Support Unit – RequirementsThe services and capabilities, which shall be provided by the MSU, are described in the following sections.5.2.2.1 CFM Embedded InformationEach CFM shall contain information regarding particular characteristics of the CFM itself. This information shall be located in non-volatile storage to ensure no loss of information caused by removal of power.The information to be stored shall be distinguished as follows:- Read-Only is information that, after definition and programming, cannot be altered during operational use. The original manufacturer shall be the only one who is capable of programming or modifying these data. This constitutes data such as the manufacturers identity, CFM type, production batch number etc.that reflect the identity of the CFM. The required retrievable information are listed in Table 1.- Read/Write is information that can be updated whenever the module is operational. This constitutes data such as the hours of operation, executed maintenance activities, operational log, etc. that reflect the operational history of the CFM. The required information that shall be available is listed in Table 2. Fault Logging is considered separately in section 5.2.2.3.The information with read-only access shall be accessible using the following methods:- By interrogation of the Maintenance Test Port, a function covered in detail in section 5.2.2.6.- By use of the MOS services, defined in the Software Standard, reference [2] .Table 1 - CFM Embedded Information - Read OnlyName Definition Type Lengthin BytesScope Accessed Via manufacturer_id Manufacturer's ID String30Global moduleInfo/MTPserial_id Serial ID unsignedShort Specific to a singlemanufacturermoduleInfo/MTPprod_batch_ date Date of production (week:2year: 4)String6N/A MTPcfm_type Standard type of CFM (SPM,DPM, GPM, MMM, NSM, PCM)String10Global moduleInfo/MTPhw_version Version of hardware unsignedShort Specific to a single manufacturerMTPmsl_version Version of MSL code stored on-CFM unsignedShortSpecific to a singlemanufacturerMTPName Definition Type Lengthin BytesScope Accessed Viastandard_mpi_ version_ compliance Version of the MPI standard thatthe CFM is compatible withunsignedShortGlobal MTPstandard_mos_ve rsion_ compliance Version of the MOS standardthat the CFM is compatible withunsignedShortGlobal moduleInfo/MTPstandard_mli_ version_ compliance Version of the MLI standard thatthe CFM is compatible withunsignedShortGlobal moduleInfo/MTPnum_network Number of different networkinterfaces on the CFM unsignedShortSpecific to CFM moduleInfo/MTPnum_pe Number of PEs resident on theCFM unsignedShortSpecific to CFM moduleInfo/MTPFor each Network interface resident on the CFMnetwork_if_id Network interface ID unsignedShortSpecific to CFM moduleInfo/MTPnetwork_if_type Type of network interface(variable scope shall be acrossall possible network interfacetypes)String10Global moduleInfo/MTPFor each PE resident on the CFMpe_id PE ID unsignedShortSpecific to CFM moduleInfo/MTPpe_type Type of PE (variable scope shallbe across all possible PE types)String10Global moduleInfo/MTPpe_performance Standardised performanceavailable from PE in MOPS unsignedLongSpecific to PE moduleInfo/MTPpe_nonvol_ memory Amount of available non-volatilememory within each PE inMbytesunsignedLongSpecific to PE moduleInfo/MTPpe_vol_memory Amount of available volatilememory within each PE inMbytes unsignedLongSpecific to PE moduleInfo/MTPpe_num_timer Number of Timers within the PE unsignedShortSpecific to PE moduleInfo/MTP For each Timer within each PE resident on the CFMpe_timer_id Timer ID unsignedShortSpecific to PE moduleInfo/MTPpe_timer_ resolution Resolution of the timer innanosecondsunsignedShortSpecific to PETimerModuleInfo/MTPTable 2 - CFM Embedded Information - Read / WriteName Definition Type LengthIn BytesAccessed viaoperational_hou rs Number of operational hours for the CFM(resolution = 1 minute)unsigned Long moduleStatus/MTP: read onlymaintenance_log Log describing the maintenance history of theCFM. A log entry needs to include:Up to 256bytes perentryreadLogDevice:read onlyMTP: read/write•Time-stamp (op hours)•Maintainer identity •Maintenance action identity unsigned LongStringString30222system_log Log describing the usage history of the CFM.A log entry needs to include:32 bytesper entryreadLogDevice/MTP: read onlywriteLogDevice:write only•Time-stamp (op hours)•Relevant system identity unsigned LongString28cfm_status Present status of the CFM; OK, Fail, PBIT inprogress, IBIT in progress etc.String10moduleStatus/MTP: read only5.2.2.2 Built-in Test Capability (BIT)Each CFM shall provide hardware and software resources to provide a level of fault detection within its own resources according to the following three BIT capabilities:- Power-up/Power-down BIT (PBIT) - Performs built-in test subsequent to module power-up. PBIT shall verify that the resources available on the CFM are fully operational before operational code isdownloaded. Details on the initialisation are given in section 5.2.4.- Continuous BIT (CBIT) - CBIT shall be performed as a background activity during normal operation of the CFM.- Initiated BIT (IBIT) - IBIT shall be performed when initiated by another entity. After initiation of IBIT the normal operation of the CFM shall be interrupted and IBIT performed. After IBIT has terminated the CFM shall return to normal operation.All BIT results, with the exception of a CBIT pass result, shall be reported to the Fault Log. The requirements for fault logging are given in section 5.2.2.3.5.2.2.3 Fault LoggingEach CFM shall provide a Fault Log implemented in non-volatile storage. Each entry in the Fault Log shall be time stamped.The Fault Log shall be accessible for off-aircraft test and maintenance via the Maintenance Test Port (MTP), which is detailed in section 5.2.2.6.Details on fault management are given in ASAAC guidelines for Fault Management, refer to [5] .NOTE: The fault log should be readable without the rest of the module being powered. Therefore the test connector should provide power inputs directly to the memory hardware that is used to implement the log.。
Arista MultiAccess产品简介说明书
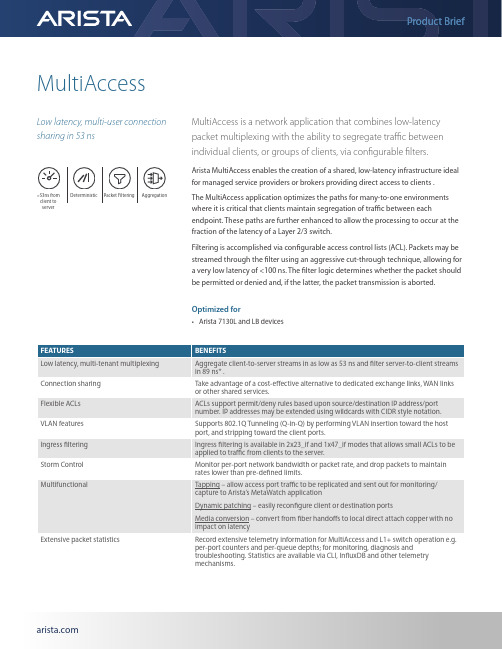
MultiAccessLow latency, multi-user connection sharing in 53 nsMultiAccess is a network application that combines low-latency packet multiplexing with the ability to segregate traffic between individual clients, or groups of clients, via configurable filters.Arista MultiAccess enables the creation of a shared, low-latency infrastructure ideal for managed service providers or brokers providing direct access to clients .The MultiAccess application optimizes the paths for many-to-one environments where it is critical that clients maintain segregation of traffic between eachendpoint. These paths are further enhanced to allow the processing to occur at the fraction of the latency of a Layer 2/3 switch.Filtering is accomplished via configurable access control lists (ACL). Packets may be streamed through the filter using an aggressive cut-through technique, allowing for a very low latency of <100 ns. The filter logic determines whether the packet should be permitted or denied and, if the latter, the packet transmission is aborted.Optimized for• Arista 7130L and LB devices<53ns from client to serverDeterministicPacket FilteringAggregation* based on lowest latency configurationLatency TablesLow Latency ModesLow latency modes are highly optimised for low latency. Features that increase the latency are disabled in these modes,including VLAN support, ingress filtering, and large ACL scale:Table 1.1 Client to Server path – Low Latency modesServer to Client latency in Low Latency modes is similar to regular MultiAccess modes, however only ACLs up to 8 rulesdeep are supported:Table 1.2 Server to Client path modes Latency for the Server to Client return path for modes supporting larger ACLs on the return path. Using 7130-LB with 10G client and 10G server port configuration asa representative sample:Table 1.4 Server to Client return path modes – larger ACLsFull Featured ModesLatency for the Client to Server path for modes supporting VLANs, ingress filtering, and larger ACLs on the return path. Using 7130-LB with 10G client and 10Gserver port configuration as a representative sample:Table 1.3 Client to Server path modes – larger ACLsArista MultiAccess for Managed Service Providers & BrokersLower-latency Exchange AccessManaged Service Providers and Brokers offer their clients access to financial exchanges and can use MultiAccess to provide significantly lower latency than typical network switches.Arista MultiAccess allows these firms to share the connection to the exchange with more than one client, while maintaining isolation between the clients. MultiAccess hence provides an ideal solution combining multiplexing (aggregation) functionality with a high-performance return path; filtering the return-path individually per client. The latter benefit from significantly lower latency in their trading connectivity as well as smaller variation in that latency.Arista MultiAccess implements a number of features which enhance this use case, for example implementing ACL filters on ingress before multiplexing, and storm control, which can avoid specific clients using an unfair amount of the network capacity.Figure 1.4 Low latency exchange accessSanta Clara—Corporate Headquarters 5453 Great America Parkway,Santa Clara, CA 95054Phone: +1-408-547-5500Fax: +1-408-538-8920Email:***************Ireland—International Headquarters3130 Atlantic AvenueWestpark Business CampusShannon, Co. ClareIrelandVancouver—R&D Office9200 Glenlyon Pkwy, Unit 300Burnaby, British ColumbiaCanada V5J 5J8San Francisco—R&D and Sales Office 1390Market Street, Suite 800San Francisco, CA 94102India—R&D OfficeGlobal Tech Park, Tower A & B, 11th FloorMarathahalli Outer Ring RoadDevarabeesanahalli Village, Varthur HobliBangalore, India 560103Singapore—APAC Administrative Office9 Temasek Boulevard#29-01, Suntec Tower TwoSingapore 038989Nashua—R&D Office10 Tara BoulevardNashua, NH 03062Copyright © 2020 Arista Networks, Inc. All rights reserved. CloudVision, and EOS are registered trademarks and Arista Networks is a trademark of Arista Networks, Inc. All other company names are trademarks of their respective holders. Information in this document is subject to change without notice. Certain features may not yet be available. Arista Networks, Inc. assumes no responsibility for any errors that may appear in this document. 09/20WAN Link MultiplexingArista MultiAccess can be used to aggregate several sources of network traffic into a WAN link and, optionally, de-multiplex from a WAN link. Often these links can be bandwidth limited (e.g. 1 GbE) with MultiAccess being able to provide a low-latency translation to and from the bandwidth-limited link. The layer 1 functionality in the Arista 7130 can be used to tap those links.To reduce the traffic volume transmitted, Arista MultiAccess can filter market data down a single, bandwidth-limited (1GbE) line. VLAN tagging and stripping can be used to multiplex multiple independent layer 2 links into a single VLAN trunk to be transmitted and then de-multiplexed. The link partner may be a traditional VLAN-aware switch, or another instance of MultiAccess.Figure 1.5 WAN Link Multiplexing。
Dell Networking W-Series 即时接入点快速入门指南说明书
Dell Networking W-Series Instant Access PointQuick Start GuideThis Quick Start Guide assists you to connect and configure Dell Networking W-Series Instant Access Point (W-IAP). To learn more about W-IAP and for detailed configuration information, see Dell Networking W-Series Instant Access Point User Guide .Getting StartedUnpack and Power on W-IAPAfter unpacking the W-IAP, check the power requirements and connect the W-IAP .ConnectTo connect the W-IAP to your network, plug in a LAN cable to Ethernet port (on the back side of the device). The Ethernet port LED turns green.ProvisionW-IAPs can be provisioned automatically, through Dell W-AirWave or bymanually connecting to a provisioning network. Use the following methods based on your W-IAP provisioning requirements.Functional W-IAP in the NetworkIf a W-IAP is already configured and is in operational state, connect the W-IAP into the same VLAN or subnet, to automatically configure the new W-IAP.Dell W-Instant UIDell W-Instant user interface (UI) is a standard web-based interface that allows you to configure and monitor a W-IAP network.To start using the Dell W-Instant UI, perform the following steps:ing a wireless client, scan the wireless networks and connect to the instant SSID.ing a web browser, go to .3.Log in to the Dell W-Instant UI with admin and admin as username and password respectively.4.If the Country Code window is displayed after a successful login, select a country from the list.5.If the Dell W-Instant UI is used for managing W-IAPs, proceed to Creating a Wireless Network . If W-AirWave is deployed for managing the network, perform the following steps.a.Navigate to System>Admin in the Dell W-Instant UI to configure W-AirWave. The window with W-AirWave configuration options is displayed.b.In the AirWave section, enter the Shared Key and AirWave IP details. Contact your local network administrator to obtain these details.Creating a Wireless NetworkTo create a wireless network using the Dell W-Instant UI, perform the following steps:1.From the Dell W-Instant UI main window, click New under the Networks section. The New WLAN window is displayed.2.In the WLAN Settings tab, enter a name (SSID) for the network. This name is used for identifying the Network.3.Click Next . The VLAN tab details are displayed.4.In the VLAN tab, select the required Client IP assignment and Client VLAN assignment options.5.Click Next . The Security tab details are displayed.6.In the Security tab, enter a unique passphrase and retype it to confirm. You can use the default values or customize the security settings.7.Click Next . The Access tab details are displayed.8.In the Access tab, ensure that the Unrestricted access control is specified. 9.Click Finish . The new network is added and displayed in the Networks window.For more information on configuring different types of wireless network such as Employee, Guest, or Voice, see Dell Networking W-Series Instant Access Point User Guide .Verifying the Operating StatusAfter setting up a W-IAP and creating a wireless network, use the Dell W-Instant UI or the LEDs to verify the operating status.Verifying Status Using LEDsYou can use the LEDs to verify that both radios are active after the AP initialization and configuration.The following table lists the Ethernet ports available on a W-IAP and the corresponding status indication:For information on the LED status indicators, see the Installation Guide provided with the W-IAP package.Verifying Status Using Dell W-Instant UITo verify that the wireless network is available and the SSID is broadcasted, perform the following steps:1.Verify that the newly created network is displayed in the Networks window: for example, employee_network as shown in Figure 1.Figure 1Network WindowW-IAP ModelEthernet PortsW-IAP134/135ENET0: Indicates uplink connection.ENET1: Indicates wired downlink connection.W-IAP3WN/3WNPE0: Indicates uplink connection.E1 and E2: Indicate wired downlink connection.NOTE: The E2 port on W-IAP3WNP supports Power SourcingEquipment (PSE) to supply power to any compliant 802.3af powered (class 0-4) device.W-IAP108/109ENET0: Indicates uplink connection.ENET1: Indicates wired downlink connection.W-IAP155/155PE0: Indicates uplink connection.E1, E2, E3, and E4: Indicate wired downlink connection.NOTE: The W-IAP155P supports PSE for 802.3at powered device (class 0-4) on one port (E1 or E2), or 802.3af powered DC IN (Power Socket) on two ports (E1 and E2).W-IAP224/225ENET0: Indicates uplink connection.ENET1: Indicates wired downlink connection.NOTE: When operating on 802.3af, only the port connected to power is usable. For example, if the source of power is connected to ENET 0, then ENET 1 will not work.W-IAP114/115ENET: Indicates uplink connection.Dell Networking W-Series Instant Access Point | Quick Start Guide Part Number 0511486-02 | December 2013Dell Networking W-SeriesInstant Access PointQuick Start GuideContacting DellMain Website Contact Information /contactdell Support Website /support Documentation Website/support/manualsCopyright© 2013 Aruba Networks, Inc. Aruba Networks trademarks include , Aruba Networks®, Aruba Wireless Networks®, the registered Aruba the Mobile Edge Company logo, and Aruba Mobility Management System®. Dell™, the DELL™ logo, and PowerConnect™ are trademarks of Dell Inc.All rights reserved. Specifications in this manual are subject to change without notice.Originated in the USA. All other trademarks are the property of their respective owners.Open Source CodeCertain Aruba products include Open Source software code developed by third parties, including software code subject to the GNU General Public License (GPL), GNU Lesser General Public License (LGPL), or other Open Source Licenses. Includes software from Litech Systems Design. The IF-MAP client library copyright 2011Infoblox, Inc. All rights reserved. This product includes software developed by Lars Fenneberg, et al. The Open Source code used can be found at this site:/open_source Legal NoticeThe use of Aruba Networks, Inc. switching platforms and software, by all individuals or corporations, to terminate other vendors’ VPN client devices constitutes complete acceptance of liability by that individual or corporation for this action and indemnifies, in full, Aruba Networks, Inc. from any and all legal actions that might be taken against it with respect to infringement of copyright on behalf of those vendors.2.Disconnect the client from instant , the default provisioning network to which your client system is connected.3.Connect your client to the newly created network.4.Log in to the Dell W-Instant UI with the administrator credentials. The instant provisioning network is automatically deleted and will no longer be available.Converting a W-IAPA W-IAP can be converted to operate as a Campus AP or Remote AP managed by a Dell Networking W-Series Mobility Controller.To convert a W-IAP through the Dell W-Instant UI, perform the following steps:1.Log in to the Dell W-Instant UI with the administrator credentials.2.Click the Maintenance link at the top right corner of the Dell W-Instant main window.3.Click the Convert tab.4.Based on your requirement, select an appropriate option from the Convert one or more Access Points to drop-down menu.5.Enter the IP address of the Dell Mobility Controller.6.Click Convert Now . The W-IAP reboots and begins operating in the mode that you configured. To convert a W-IAP from a controller-managed mode to Dell W-Instant mode,manually reset the W-IAP.For more information on the W-IAP conversion process, see the Dell Networking W-Series Instant Access Point User Guide .。
WLN00100-无线局域网控制器(WLC)最优配置方法
【标题】无线局域网控制器(WLC)最优配置方法【译者姓名】彭国勇【校对人】【翻译完成时间】2008-1-19【原文英文标题】Wireless LAN Controller (WLC) Configuration Best Practices【原文链接】/en/US/tech/tk722/tk809/technologies_tech_note09186a008081088 0.shtml【翻译内容】目录介绍 (2)先决条件 (2)要求 (2)使用组件 (2)公约 (3)最佳做法 (3)无线/射频 (3)网络连接 (4)网络设计 (8)移动性 (8)安全 (13)总结 (16)如何把WLC 崩溃文件从WLC传输到TFTP服务器 (21)本文档提供了WLC的简短配置窍门,包括在TAC中心常见的几个有关无线统一基础设施问题。
该文档适用于大多数网络实现环境,以便最大限度减少可能发生的问题。
注意:并不是所有的网络都是等同的,因此,一些建议可能并不适用于您的网络安装环境。
总是需要核实,然后再进行一些更改。
先决条件要求思科建议您了解这些议题:∙了解如何配置无线局域网控制器( WLC )和轻量级接入点(LAP)的基本操作∙轻量级接入点协议( LWAPP )和无线安全的基本知识使用组件此文档中的信息是基于这些软件和硬件版本:∙思科2000/2100/4400系列WLC ,运行软件版本在4.2或5.0∙LWAPP的接入点, 1230,1240,1130,10x0和1510 系列本文件中所涉及的设备均在特定的实验室环境。
本文件中使用所有设备开始为默认配置,在配置网络之前,要确保了解潜在影响的任何命令。
在文件公约中,如了解更多信息请参考Cisco Technical Tips Conventions 连接。
最佳做法无线/射频对于无线/射频( RF )最佳做法如下:∙对于任何无线部署,前期必须要进行一个适当的实地勘察,以确保为无线用户提供适当的服务质量。
set_ideal_network -no_propagation用法 -回复
set_ideal_network -no_propagation用法-回复“set_ideal_network no_propagation用法”指的是在构建神经网络时,采用了无传播(no propagation)的理想网络(ideal network)设置。
本文将逐步介绍这个用法,包括它的定义、作用、使用场景以及具体操作步骤。
通过阐述这些内容,读者将能够深入了解set_ideal_networkno_propagation的用途和实践方法。
一、定义与作用在开始之前,我们先来了解“set_ideal_network no_propagation”的定义和作用。
set_ideal_network是指在神经网络构建的过程中,创建一个没有传播的理想网络。
no_propagation表示网络在训练过程中不进行传播,即不计算梯度。
这种设置的主要作用是为了比较网络在完全无传播的情况下的性能表现。
通过与其他传统的网络进行对比,可以验证传统网络中传递的信息对模型的训练和性能产生的影响。
二、使用场景接下来,我们来探讨一些使用set_ideal_network no_propagation的典型场景。
这种设置通常用于以下情况:1. 网络设计和优化:理想网络的设置可以帮助设计者更好地理解各个网络层级之间的复杂关系,提供参考用于优化网络的结构和参数。
2. 梯度分析和网络评估:通过与传统网络进行比较,可以分析并评估梯度对训练过程和模型效果的影响。
这有助于深入研究网络的训练机制以及隐藏层间的信息流动。
3. 比较不同模型结构:使用理想网络进行比较可以帮助研究人员更好地理解不同模型结构对学习能力和权重更新的影响,进而优化网络架构。
三、操作步骤现在,我们将介绍一些具体的操作步骤来使用set_ideal_networkno_propagation。
1. 定义理想网络:首先,我们需要定义一个不进行传播的理想网络。
这可以通过在定义网络模型时注意不进行反向传播来实现。
WRFChem Users Guide

The following institutions were instrumental in the development of the WRF-Chem model and its documentation. Department of Commerce/National Oceanic and Atmospheric Administration The Cooperative Institute for Research in Environmental Sciences The University Corporation for Atmospheric Research (UCAR) The National Center for Atmospheric Research (NCAR) The Max Plank Institute The University of Chile Centro de Previsão de Tempo e Estudos Climáticos This document does not constitute endorsement of the information, products or services contained herein by the contributing institutions previously named or unnamed. For other than authorized activities, the contributing institutions do not exercise any editorial control over the information contained herein. Any opinions, findings, conclusions or recommendations expressed in this document are those of the authors and do not necessarily reflect those of the contributing institutions. In no event shall these institutions, or any unmentioned institution associated with WRF-Chem development, be liable for any damages, whatsoever, whether direct, indirect, consequential or special, that arise out of or in connection with the access, use or performance of WRF-Chem, including infringement actions. The Weather Research and Forecasting model (WRF hereafter) was developed at the National Center for Atmospheric Research (NCAR) that is operated by the University Corporation for Atmospheric Research (UCAR). NCAR and UCAR make no proprietary claims, either statutory or otherwise, to this version and release of WRF and consider WRF to be in the public domain for use by any person or entity for any purpose without any fee or charge. UCAR requests that any WRF user include this notice on any partial or full copies of WRF. WRF is provided on an “AS IS” basis and any warranties, either express or implied, including but not limited to implied warranties of non-infringement, originality, merchantability and fitness for a particular purpose, are disclaimed. In no event shall UCAR be liable for any damages, whatsoever, whether direct, indirect, consequential or special, which arise out of or in connection with the access, use or performance of WRF, including infringement actions.
合勤交换机使用手册

合勤科技交换机使用手册速查版本 1.0目录1. 硬件连接、常规设置与维护 (4)1.1 硬件安装 (4)1.2 硬件介绍 (5)1.3 常规设置 (6)2. 常规维护 (11)3. 高级设定 (13)3.1 VLAN设定 (13)3.2 STP(生成树协议)设置 (24)3.3 Access Control List (访问控制列表) (28)3.4 ES-3124_ACL功能完成IP与MAC的绑定 (32)3.5 ES-3124_Link Aggregation设置 (36)3.6 IGMP Snooping(组播侦听) (38)3.7 Static MAC Forwarding(静态MAC地址转发) (39)3.8 Filtering (过滤器) (39)3.9 Broadcast Storm Control (广播风暴控制) (39)3.10 Mirroring (端口镜像) (40)3.11 DHCP Relay (41)1. 硬件连接、常规设置与维护本章节介绍硬件连接方法,常规设置和基本维护方法,能够帮助您快速安全的将交换机接入网络。
1.1 硬件安装1.1.1 独立式安装:您可以将随机配备的绝缘脚垫安装到交换机底部,并将交换机置放到安全、干燥、清洁的环境中。
图-11.1.2 机架式安装(1)将随机配备的安装部件牢固的固定在交换机两侧。
如下图所示:图-2(2)利用安装部件将交换机牢固的安装在您的机架上。
如下图所示:注释: 合勤科技交换机系列,ES-2024A/ ES-3124/ ES-3148/ GS-2024/ ES-1528/ ES-1552/ GS-1524/ GS-1548都是标准的19英寸长度设计。
图-31.2 硬件介绍合勤交换机前面板的设计大体相似, 左侧是10/100/1000Mbps以太网接口,或者SFP光口。
右侧通常是上联端口,1000Mpbs的以太网接口或者SFP光口,或者是以太网和SFP双重属性端口。
3GPP TS 36.331 V13.2.0 (2016-06)

3GPP TS 36.331 V13.2.0 (2016-06)Technical Specification3rd Generation Partnership Project;Technical Specification Group Radio Access Network;Evolved Universal Terrestrial Radio Access (E-UTRA);Radio Resource Control (RRC);Protocol specification(Release 13)The present document has been developed within the 3rd Generation Partnership Project (3GPP TM) and may be further elaborated for the purposes of 3GPP. The present document has not been subject to any approval process by the 3GPP Organizational Partners and shall not be implemented.This Specification is provided for future development work within 3GPP only. The Organizational Partners accept no liability for any use of this Specification. Specifications and reports for implementation of the 3GPP TM system should be obtained via the 3GPP Organizational Partners' Publications Offices.KeywordsUMTS, radio3GPPPostal address3GPP support office address650 Route des Lucioles - Sophia AntipolisValbonne - FRANCETel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16InternetCopyright NotificationNo part may be reproduced except as authorized by written permission.The copyright and the foregoing restriction extend to reproduction in all media.© 2016, 3GPP Organizational Partners (ARIB, ATIS, CCSA, ETSI, TSDSI, TTA, TTC).All rights reserved.UMTS™ is a Trade Mark of ETSI registered for the benefit of its members3GPP™ is a Trade Mark of ETSI registered for the benefit of its Members and of the 3GPP Organizational PartnersLTE™ is a Trade Mark of ETSI currently being registered for the benefit of its Members and of the 3GPP Organizational Partners GSM® and the GSM logo are registered and owned by the GSM AssociationBluetooth® is a Trade Mark of the Bluetooth SIG registered for the benefit of its membersContentsForeword (18)1Scope (19)2References (19)3Definitions, symbols and abbreviations (22)3.1Definitions (22)3.2Abbreviations (24)4General (27)4.1Introduction (27)4.2Architecture (28)4.2.1UE states and state transitions including inter RAT (28)4.2.2Signalling radio bearers (29)4.3Services (30)4.3.1Services provided to upper layers (30)4.3.2Services expected from lower layers (30)4.4Functions (30)5Procedures (32)5.1General (32)5.1.1Introduction (32)5.1.2General requirements (32)5.2System information (33)5.2.1Introduction (33)5.2.1.1General (33)5.2.1.2Scheduling (34)5.2.1.2a Scheduling for NB-IoT (34)5.2.1.3System information validity and notification of changes (35)5.2.1.4Indication of ETWS notification (36)5.2.1.5Indication of CMAS notification (37)5.2.1.6Notification of EAB parameters change (37)5.2.1.7Access Barring parameters change in NB-IoT (37)5.2.2System information acquisition (38)5.2.2.1General (38)5.2.2.2Initiation (38)5.2.2.3System information required by the UE (38)5.2.2.4System information acquisition by the UE (39)5.2.2.5Essential system information missing (42)5.2.2.6Actions upon reception of the MasterInformationBlock message (42)5.2.2.7Actions upon reception of the SystemInformationBlockType1 message (42)5.2.2.8Actions upon reception of SystemInformation messages (44)5.2.2.9Actions upon reception of SystemInformationBlockType2 (44)5.2.2.10Actions upon reception of SystemInformationBlockType3 (45)5.2.2.11Actions upon reception of SystemInformationBlockType4 (45)5.2.2.12Actions upon reception of SystemInformationBlockType5 (45)5.2.2.13Actions upon reception of SystemInformationBlockType6 (45)5.2.2.14Actions upon reception of SystemInformationBlockType7 (45)5.2.2.15Actions upon reception of SystemInformationBlockType8 (45)5.2.2.16Actions upon reception of SystemInformationBlockType9 (46)5.2.2.17Actions upon reception of SystemInformationBlockType10 (46)5.2.2.18Actions upon reception of SystemInformationBlockType11 (46)5.2.2.19Actions upon reception of SystemInformationBlockType12 (47)5.2.2.20Actions upon reception of SystemInformationBlockType13 (48)5.2.2.21Actions upon reception of SystemInformationBlockType14 (48)5.2.2.22Actions upon reception of SystemInformationBlockType15 (48)5.2.2.23Actions upon reception of SystemInformationBlockType16 (48)5.2.2.24Actions upon reception of SystemInformationBlockType17 (48)5.2.2.25Actions upon reception of SystemInformationBlockType18 (48)5.2.2.26Actions upon reception of SystemInformationBlockType19 (49)5.2.3Acquisition of an SI message (49)5.2.3a Acquisition of an SI message by BL UE or UE in CE or a NB-IoT UE (50)5.3Connection control (50)5.3.1Introduction (50)5.3.1.1RRC connection control (50)5.3.1.2Security (52)5.3.1.2a RN security (53)5.3.1.3Connected mode mobility (53)5.3.1.4Connection control in NB-IoT (54)5.3.2Paging (55)5.3.2.1General (55)5.3.2.2Initiation (55)5.3.2.3Reception of the Paging message by the UE (55)5.3.3RRC connection establishment (56)5.3.3.1General (56)5.3.3.1a Conditions for establishing RRC Connection for sidelink communication/ discovery (58)5.3.3.2Initiation (59)5.3.3.3Actions related to transmission of RRCConnectionRequest message (63)5.3.3.3a Actions related to transmission of RRCConnectionResumeRequest message (64)5.3.3.4Reception of the RRCConnectionSetup by the UE (64)5.3.3.4a Reception of the RRCConnectionResume by the UE (66)5.3.3.5Cell re-selection while T300, T302, T303, T305, T306, or T308 is running (68)5.3.3.6T300 expiry (68)5.3.3.7T302, T303, T305, T306, or T308 expiry or stop (69)5.3.3.8Reception of the RRCConnectionReject by the UE (70)5.3.3.9Abortion of RRC connection establishment (71)5.3.3.10Handling of SSAC related parameters (71)5.3.3.11Access barring check (72)5.3.3.12EAB check (73)5.3.3.13Access barring check for ACDC (73)5.3.3.14Access Barring check for NB-IoT (74)5.3.4Initial security activation (75)5.3.4.1General (75)5.3.4.2Initiation (76)5.3.4.3Reception of the SecurityModeCommand by the UE (76)5.3.5RRC connection reconfiguration (77)5.3.5.1General (77)5.3.5.2Initiation (77)5.3.5.3Reception of an RRCConnectionReconfiguration not including the mobilityControlInfo by theUE (77)5.3.5.4Reception of an RRCConnectionReconfiguration including the mobilityControlInfo by the UE(handover) (79)5.3.5.5Reconfiguration failure (83)5.3.5.6T304 expiry (handover failure) (83)5.3.5.7Void (84)5.3.5.7a T307 expiry (SCG change failure) (84)5.3.5.8Radio Configuration involving full configuration option (84)5.3.6Counter check (86)5.3.6.1General (86)5.3.6.2Initiation (86)5.3.6.3Reception of the CounterCheck message by the UE (86)5.3.7RRC connection re-establishment (87)5.3.7.1General (87)5.3.7.2Initiation (87)5.3.7.3Actions following cell selection while T311 is running (88)5.3.7.4Actions related to transmission of RRCConnectionReestablishmentRequest message (89)5.3.7.5Reception of the RRCConnectionReestablishment by the UE (89)5.3.7.6T311 expiry (91)5.3.7.7T301 expiry or selected cell no longer suitable (91)5.3.7.8Reception of RRCConnectionReestablishmentReject by the UE (91)5.3.8RRC connection release (92)5.3.8.1General (92)5.3.8.2Initiation (92)5.3.8.3Reception of the RRCConnectionRelease by the UE (92)5.3.8.4T320 expiry (93)5.3.9RRC connection release requested by upper layers (93)5.3.9.1General (93)5.3.9.2Initiation (93)5.3.10Radio resource configuration (93)5.3.10.0General (93)5.3.10.1SRB addition/ modification (94)5.3.10.2DRB release (95)5.3.10.3DRB addition/ modification (95)5.3.10.3a1DC specific DRB addition or reconfiguration (96)5.3.10.3a2LWA specific DRB addition or reconfiguration (98)5.3.10.3a3LWIP specific DRB addition or reconfiguration (98)5.3.10.3a SCell release (99)5.3.10.3b SCell addition/ modification (99)5.3.10.3c PSCell addition or modification (99)5.3.10.4MAC main reconfiguration (99)5.3.10.5Semi-persistent scheduling reconfiguration (100)5.3.10.6Physical channel reconfiguration (100)5.3.10.7Radio Link Failure Timers and Constants reconfiguration (101)5.3.10.8Time domain measurement resource restriction for serving cell (101)5.3.10.9Other configuration (102)5.3.10.10SCG reconfiguration (103)5.3.10.11SCG dedicated resource configuration (104)5.3.10.12Reconfiguration SCG or split DRB by drb-ToAddModList (105)5.3.10.13Neighbour cell information reconfiguration (105)5.3.10.14Void (105)5.3.10.15Sidelink dedicated configuration (105)5.3.10.16T370 expiry (106)5.3.11Radio link failure related actions (107)5.3.11.1Detection of physical layer problems in RRC_CONNECTED (107)5.3.11.2Recovery of physical layer problems (107)5.3.11.3Detection of radio link failure (107)5.3.12UE actions upon leaving RRC_CONNECTED (109)5.3.13UE actions upon PUCCH/ SRS release request (110)5.3.14Proximity indication (110)5.3.14.1General (110)5.3.14.2Initiation (111)5.3.14.3Actions related to transmission of ProximityIndication message (111)5.3.15Void (111)5.4Inter-RAT mobility (111)5.4.1Introduction (111)5.4.2Handover to E-UTRA (112)5.4.2.1General (112)5.4.2.2Initiation (112)5.4.2.3Reception of the RRCConnectionReconfiguration by the UE (112)5.4.2.4Reconfiguration failure (114)5.4.2.5T304 expiry (handover to E-UTRA failure) (114)5.4.3Mobility from E-UTRA (114)5.4.3.1General (114)5.4.3.2Initiation (115)5.4.3.3Reception of the MobilityFromEUTRACommand by the UE (115)5.4.3.4Successful completion of the mobility from E-UTRA (116)5.4.3.5Mobility from E-UTRA failure (117)5.4.4Handover from E-UTRA preparation request (CDMA2000) (117)5.4.4.1General (117)5.4.4.2Initiation (118)5.4.4.3Reception of the HandoverFromEUTRAPreparationRequest by the UE (118)5.4.5UL handover preparation transfer (CDMA2000) (118)5.4.5.1General (118)5.4.5.2Initiation (118)5.4.5.3Actions related to transmission of the ULHandoverPreparationTransfer message (119)5.4.5.4Failure to deliver the ULHandoverPreparationTransfer message (119)5.4.6Inter-RAT cell change order to E-UTRAN (119)5.4.6.1General (119)5.4.6.2Initiation (119)5.4.6.3UE fails to complete an inter-RAT cell change order (119)5.5Measurements (120)5.5.1Introduction (120)5.5.2Measurement configuration (121)5.5.2.1General (121)5.5.2.2Measurement identity removal (122)5.5.2.2a Measurement identity autonomous removal (122)5.5.2.3Measurement identity addition/ modification (123)5.5.2.4Measurement object removal (124)5.5.2.5Measurement object addition/ modification (124)5.5.2.6Reporting configuration removal (126)5.5.2.7Reporting configuration addition/ modification (127)5.5.2.8Quantity configuration (127)5.5.2.9Measurement gap configuration (127)5.5.2.10Discovery signals measurement timing configuration (128)5.5.2.11RSSI measurement timing configuration (128)5.5.3Performing measurements (128)5.5.3.1General (128)5.5.3.2Layer 3 filtering (131)5.5.4Measurement report triggering (131)5.5.4.1General (131)5.5.4.2Event A1 (Serving becomes better than threshold) (135)5.5.4.3Event A2 (Serving becomes worse than threshold) (136)5.5.4.4Event A3 (Neighbour becomes offset better than PCell/ PSCell) (136)5.5.4.5Event A4 (Neighbour becomes better than threshold) (137)5.5.4.6Event A5 (PCell/ PSCell becomes worse than threshold1 and neighbour becomes better thanthreshold2) (138)5.5.4.6a Event A6 (Neighbour becomes offset better than SCell) (139)5.5.4.7Event B1 (Inter RAT neighbour becomes better than threshold) (139)5.5.4.8Event B2 (PCell becomes worse than threshold1 and inter RAT neighbour becomes better thanthreshold2) (140)5.5.4.9Event C1 (CSI-RS resource becomes better than threshold) (141)5.5.4.10Event C2 (CSI-RS resource becomes offset better than reference CSI-RS resource) (141)5.5.4.11Event W1 (WLAN becomes better than a threshold) (142)5.5.4.12Event W2 (All WLAN inside WLAN mobility set becomes worse than threshold1 and a WLANoutside WLAN mobility set becomes better than threshold2) (142)5.5.4.13Event W3 (All WLAN inside WLAN mobility set becomes worse than a threshold) (143)5.5.5Measurement reporting (144)5.5.6Measurement related actions (148)5.5.6.1Actions upon handover and re-establishment (148)5.5.6.2Speed dependant scaling of measurement related parameters (149)5.5.7Inter-frequency RSTD measurement indication (149)5.5.7.1General (149)5.5.7.2Initiation (150)5.5.7.3Actions related to transmission of InterFreqRSTDMeasurementIndication message (150)5.6Other (150)5.6.0General (150)5.6.1DL information transfer (151)5.6.1.1General (151)5.6.1.2Initiation (151)5.6.1.3Reception of the DLInformationTransfer by the UE (151)5.6.2UL information transfer (151)5.6.2.1General (151)5.6.2.2Initiation (151)5.6.2.3Actions related to transmission of ULInformationTransfer message (152)5.6.2.4Failure to deliver ULInformationTransfer message (152)5.6.3UE capability transfer (152)5.6.3.1General (152)5.6.3.2Initiation (153)5.6.3.3Reception of the UECapabilityEnquiry by the UE (153)5.6.4CSFB to 1x Parameter transfer (157)5.6.4.1General (157)5.6.4.2Initiation (157)5.6.4.3Actions related to transmission of CSFBParametersRequestCDMA2000 message (157)5.6.4.4Reception of the CSFBParametersResponseCDMA2000 message (157)5.6.5UE Information (158)5.6.5.1General (158)5.6.5.2Initiation (158)5.6.5.3Reception of the UEInformationRequest message (158)5.6.6 Logged Measurement Configuration (159)5.6.6.1General (159)5.6.6.2Initiation (160)5.6.6.3Reception of the LoggedMeasurementConfiguration by the UE (160)5.6.6.4T330 expiry (160)5.6.7 Release of Logged Measurement Configuration (160)5.6.7.1General (160)5.6.7.2Initiation (160)5.6.8 Measurements logging (161)5.6.8.1General (161)5.6.8.2Initiation (161)5.6.9In-device coexistence indication (163)5.6.9.1General (163)5.6.9.2Initiation (164)5.6.9.3Actions related to transmission of InDeviceCoexIndication message (164)5.6.10UE Assistance Information (165)5.6.10.1General (165)5.6.10.2Initiation (166)5.6.10.3Actions related to transmission of UEAssistanceInformation message (166)5.6.11 Mobility history information (166)5.6.11.1General (166)5.6.11.2Initiation (166)5.6.12RAN-assisted WLAN interworking (167)5.6.12.1General (167)5.6.12.2Dedicated WLAN offload configuration (167)5.6.12.3WLAN offload RAN evaluation (167)5.6.12.4T350 expiry or stop (167)5.6.12.5Cell selection/ re-selection while T350 is running (168)5.6.13SCG failure information (168)5.6.13.1General (168)5.6.13.2Initiation (168)5.6.13.3Actions related to transmission of SCGFailureInformation message (168)5.6.14LTE-WLAN Aggregation (169)5.6.14.1Introduction (169)5.6.14.2Reception of LWA configuration (169)5.6.14.3Release of LWA configuration (170)5.6.15WLAN connection management (170)5.6.15.1Introduction (170)5.6.15.2WLAN connection status reporting (170)5.6.15.2.1General (170)5.6.15.2.2Initiation (171)5.6.15.2.3Actions related to transmission of WLANConnectionStatusReport message (171)5.6.15.3T351 Expiry (WLAN connection attempt timeout) (171)5.6.15.4WLAN status monitoring (171)5.6.16RAN controlled LTE-WLAN interworking (172)5.6.16.1General (172)5.6.16.2WLAN traffic steering command (172)5.6.17LTE-WLAN aggregation with IPsec tunnel (173)5.6.17.1General (173)5.7Generic error handling (174)5.7.1General (174)5.7.2ASN.1 violation or encoding error (174)5.7.3Field set to a not comprehended value (174)5.7.4Mandatory field missing (174)5.7.5Not comprehended field (176)5.8MBMS (176)5.8.1Introduction (176)5.8.1.1General (176)5.8.1.2Scheduling (176)5.8.1.3MCCH information validity and notification of changes (176)5.8.2MCCH information acquisition (178)5.8.2.1General (178)5.8.2.2Initiation (178)5.8.2.3MCCH information acquisition by the UE (178)5.8.2.4Actions upon reception of the MBSFNAreaConfiguration message (178)5.8.2.5Actions upon reception of the MBMSCountingRequest message (179)5.8.3MBMS PTM radio bearer configuration (179)5.8.3.1General (179)5.8.3.2Initiation (179)5.8.3.3MRB establishment (179)5.8.3.4MRB release (179)5.8.4MBMS Counting Procedure (179)5.8.4.1General (179)5.8.4.2Initiation (180)5.8.4.3Reception of the MBMSCountingRequest message by the UE (180)5.8.5MBMS interest indication (181)5.8.5.1General (181)5.8.5.2Initiation (181)5.8.5.3Determine MBMS frequencies of interest (182)5.8.5.4Actions related to transmission of MBMSInterestIndication message (183)5.8a SC-PTM (183)5.8a.1Introduction (183)5.8a.1.1General (183)5.8a.1.2SC-MCCH scheduling (183)5.8a.1.3SC-MCCH information validity and notification of changes (183)5.8a.1.4Procedures (184)5.8a.2SC-MCCH information acquisition (184)5.8a.2.1General (184)5.8a.2.2Initiation (184)5.8a.2.3SC-MCCH information acquisition by the UE (184)5.8a.2.4Actions upon reception of the SCPTMConfiguration message (185)5.8a.3SC-PTM radio bearer configuration (185)5.8a.3.1General (185)5.8a.3.2Initiation (185)5.8a.3.3SC-MRB establishment (185)5.8a.3.4SC-MRB release (185)5.9RN procedures (186)5.9.1RN reconfiguration (186)5.9.1.1General (186)5.9.1.2Initiation (186)5.9.1.3Reception of the RNReconfiguration by the RN (186)5.10Sidelink (186)5.10.1Introduction (186)5.10.1a Conditions for sidelink communication operation (187)5.10.2Sidelink UE information (188)5.10.2.1General (188)5.10.2.2Initiation (189)5.10.2.3Actions related to transmission of SidelinkUEInformation message (193)5.10.3Sidelink communication monitoring (195)5.10.6Sidelink discovery announcement (198)5.10.6a Sidelink discovery announcement pool selection (201)5.10.6b Sidelink discovery announcement reference carrier selection (201)5.10.7Sidelink synchronisation information transmission (202)5.10.7.1General (202)5.10.7.2Initiation (203)5.10.7.3Transmission of SLSS (204)5.10.7.4Transmission of MasterInformationBlock-SL message (205)5.10.7.5Void (206)5.10.8Sidelink synchronisation reference (206)5.10.8.1General (206)5.10.8.2Selection and reselection of synchronisation reference UE (SyncRef UE) (206)5.10.9Sidelink common control information (207)5.10.9.1General (207)5.10.9.2Actions related to reception of MasterInformationBlock-SL message (207)5.10.10Sidelink relay UE operation (207)5.10.10.1General (207)5.10.10.2AS-conditions for relay related sidelink communication transmission by sidelink relay UE (207)5.10.10.3AS-conditions for relay PS related sidelink discovery transmission by sidelink relay UE (208)5.10.10.4Sidelink relay UE threshold conditions (208)5.10.11Sidelink remote UE operation (208)5.10.11.1General (208)5.10.11.2AS-conditions for relay related sidelink communication transmission by sidelink remote UE (208)5.10.11.3AS-conditions for relay PS related sidelink discovery transmission by sidelink remote UE (209)5.10.11.4Selection and reselection of sidelink relay UE (209)5.10.11.5Sidelink remote UE threshold conditions (210)6Protocol data units, formats and parameters (tabular & ASN.1) (210)6.1General (210)6.2RRC messages (212)6.2.1General message structure (212)–EUTRA-RRC-Definitions (212)–BCCH-BCH-Message (212)–BCCH-DL-SCH-Message (212)–BCCH-DL-SCH-Message-BR (213)–MCCH-Message (213)–PCCH-Message (213)–DL-CCCH-Message (214)–DL-DCCH-Message (214)–UL-CCCH-Message (214)–UL-DCCH-Message (215)–SC-MCCH-Message (215)6.2.2Message definitions (216)–CounterCheck (216)–CounterCheckResponse (217)–CSFBParametersRequestCDMA2000 (217)–CSFBParametersResponseCDMA2000 (218)–DLInformationTransfer (218)–HandoverFromEUTRAPreparationRequest (CDMA2000) (219)–InDeviceCoexIndication (220)–InterFreqRSTDMeasurementIndication (222)–LoggedMeasurementConfiguration (223)–MasterInformationBlock (225)–MBMSCountingRequest (226)–MBMSCountingResponse (226)–MBMSInterestIndication (227)–MBSFNAreaConfiguration (228)–MeasurementReport (228)–MobilityFromEUTRACommand (229)–Paging (232)–ProximityIndication (233)–RNReconfiguration (234)–RNReconfigurationComplete (234)–RRCConnectionReconfiguration (235)–RRCConnectionReconfigurationComplete (240)–RRCConnectionReestablishment (241)–RRCConnectionReestablishmentComplete (241)–RRCConnectionReestablishmentReject (242)–RRCConnectionReestablishmentRequest (243)–RRCConnectionReject (243)–RRCConnectionRelease (244)–RRCConnectionResume (248)–RRCConnectionResumeComplete (249)–RRCConnectionResumeRequest (250)–RRCConnectionRequest (250)–RRCConnectionSetup (251)–RRCConnectionSetupComplete (252)–SCGFailureInformation (253)–SCPTMConfiguration (254)–SecurityModeCommand (255)–SecurityModeComplete (255)–SecurityModeFailure (256)–SidelinkUEInformation (256)–SystemInformation (258)–SystemInformationBlockType1 (259)–UEAssistanceInformation (264)–UECapabilityEnquiry (265)–UECapabilityInformation (266)–UEInformationRequest (267)–UEInformationResponse (267)–ULHandoverPreparationTransfer (CDMA2000) (273)–ULInformationTransfer (274)–WLANConnectionStatusReport (274)6.3RRC information elements (275)6.3.1System information blocks (275)–SystemInformationBlockType2 (275)–SystemInformationBlockType3 (279)–SystemInformationBlockType4 (282)–SystemInformationBlockType5 (283)–SystemInformationBlockType6 (287)–SystemInformationBlockType7 (289)–SystemInformationBlockType8 (290)–SystemInformationBlockType9 (295)–SystemInformationBlockType10 (295)–SystemInformationBlockType11 (296)–SystemInformationBlockType12 (297)–SystemInformationBlockType13 (297)–SystemInformationBlockType14 (298)–SystemInformationBlockType15 (298)–SystemInformationBlockType16 (299)–SystemInformationBlockType17 (300)–SystemInformationBlockType18 (301)–SystemInformationBlockType19 (301)–SystemInformationBlockType20 (304)6.3.2Radio resource control information elements (304)–AntennaInfo (304)–AntennaInfoUL (306)–CQI-ReportConfig (307)–CQI-ReportPeriodicProcExtId (314)–CrossCarrierSchedulingConfig (314)–CSI-IM-Config (315)–CSI-IM-ConfigId (315)–CSI-RS-Config (317)–CSI-RS-ConfigEMIMO (318)–CSI-RS-ConfigNZP (319)–CSI-RS-ConfigNZPId (320)–CSI-RS-ConfigZP (321)–CSI-RS-ConfigZPId (321)–DMRS-Config (321)–DRB-Identity (322)–EPDCCH-Config (322)–EIMTA-MainConfig (324)–LogicalChannelConfig (325)–LWA-Configuration (326)–LWIP-Configuration (326)–RCLWI-Configuration (327)–MAC-MainConfig (327)–P-C-AndCBSR (332)–PDCCH-ConfigSCell (333)–PDCP-Config (334)–PDSCH-Config (337)–PDSCH-RE-MappingQCL-ConfigId (339)–PHICH-Config (339)–PhysicalConfigDedicated (339)–P-Max (344)–PRACH-Config (344)–PresenceAntennaPort1 (346)–PUCCH-Config (347)–PUSCH-Config (351)–RACH-ConfigCommon (355)–RACH-ConfigDedicated (357)–RadioResourceConfigCommon (358)–RadioResourceConfigDedicated (362)–RLC-Config (367)–RLF-TimersAndConstants (369)–RN-SubframeConfig (370)–SchedulingRequestConfig (371)–SoundingRS-UL-Config (372)–SPS-Config (375)–TDD-Config (376)–TimeAlignmentTimer (377)–TPC-PDCCH-Config (377)–TunnelConfigLWIP (378)–UplinkPowerControl (379)–WLAN-Id-List (382)–WLAN-MobilityConfig (382)6.3.3Security control information elements (382)–NextHopChainingCount (382)–SecurityAlgorithmConfig (383)–ShortMAC-I (383)6.3.4Mobility control information elements (383)–AdditionalSpectrumEmission (383)–ARFCN-ValueCDMA2000 (383)–ARFCN-ValueEUTRA (384)–ARFCN-ValueGERAN (384)–ARFCN-ValueUTRA (384)–BandclassCDMA2000 (384)–BandIndicatorGERAN (385)–CarrierFreqCDMA2000 (385)–CarrierFreqGERAN (385)–CellIndexList (387)–CellReselectionPriority (387)–CellSelectionInfoCE (387)–CellReselectionSubPriority (388)–CSFB-RegistrationParam1XRTT (388)–CellGlobalIdEUTRA (389)–CellGlobalIdUTRA (389)–CellGlobalIdGERAN (390)–CellGlobalIdCDMA2000 (390)–CellSelectionInfoNFreq (391)–CSG-Identity (391)–FreqBandIndicator (391)–MobilityControlInfo (391)–MobilityParametersCDMA2000 (1xRTT) (393)–MobilityStateParameters (394)–MultiBandInfoList (394)–NS-PmaxList (394)–PhysCellId (395)–PhysCellIdRange (395)–PhysCellIdRangeUTRA-FDDList (395)–PhysCellIdCDMA2000 (396)–PhysCellIdGERAN (396)–PhysCellIdUTRA-FDD (396)–PhysCellIdUTRA-TDD (396)–PLMN-Identity (397)–PLMN-IdentityList3 (397)–PreRegistrationInfoHRPD (397)–Q-QualMin (398)–Q-RxLevMin (398)–Q-OffsetRange (398)–Q-OffsetRangeInterRAT (399)–ReselectionThreshold (399)–ReselectionThresholdQ (399)–SCellIndex (399)–ServCellIndex (400)–SpeedStateScaleFactors (400)–SystemInfoListGERAN (400)–SystemTimeInfoCDMA2000 (401)–TrackingAreaCode (401)–T-Reselection (402)–T-ReselectionEUTRA-CE (402)6.3.5Measurement information elements (402)–AllowedMeasBandwidth (402)–CSI-RSRP-Range (402)–Hysteresis (402)–LocationInfo (403)–MBSFN-RSRQ-Range (403)–MeasConfig (404)–MeasDS-Config (405)–MeasGapConfig (406)–MeasId (407)–MeasIdToAddModList (407)–MeasObjectCDMA2000 (408)–MeasObjectEUTRA (408)–MeasObjectGERAN (412)–MeasObjectId (412)–MeasObjectToAddModList (412)–MeasObjectUTRA (413)–ReportConfigEUTRA (422)–ReportConfigId (425)–ReportConfigInterRAT (425)–ReportConfigToAddModList (428)–ReportInterval (429)–RSRP-Range (429)–RSRQ-Range (430)–RSRQ-Type (430)–RS-SINR-Range (430)–RSSI-Range-r13 (431)–TimeToTrigger (431)–UL-DelayConfig (431)–WLAN-CarrierInfo (431)–WLAN-RSSI-Range (432)–WLAN-Status (432)6.3.6Other information elements (433)–AbsoluteTimeInfo (433)–AreaConfiguration (433)–C-RNTI (433)–DedicatedInfoCDMA2000 (434)–DedicatedInfoNAS (434)–FilterCoefficient (434)–LoggingDuration (434)–LoggingInterval (435)–MeasSubframePattern (435)–MMEC (435)–NeighCellConfig (435)–OtherConfig (436)–RAND-CDMA2000 (1xRTT) (437)–RAT-Type (437)–ResumeIdentity (437)–RRC-TransactionIdentifier (438)–S-TMSI (438)–TraceReference (438)–UE-CapabilityRAT-ContainerList (438)–UE-EUTRA-Capability (439)–UE-RadioPagingInfo (469)–UE-TimersAndConstants (469)–VisitedCellInfoList (470)–WLAN-OffloadConfig (470)6.3.7MBMS information elements (472)–MBMS-NotificationConfig (472)–MBMS-ServiceList (473)–MBSFN-AreaId (473)–MBSFN-AreaInfoList (473)–MBSFN-SubframeConfig (474)–PMCH-InfoList (475)6.3.7a SC-PTM information elements (476)–SC-MTCH-InfoList (476)–SCPTM-NeighbourCellList (478)6.3.8Sidelink information elements (478)–SL-CommConfig (478)–SL-CommResourcePool (479)–SL-CP-Len (480)–SL-DiscConfig (481)–SL-DiscResourcePool (483)–SL-DiscTxPowerInfo (485)–SL-GapConfig (485)。
合勤交换机使用手册

合勤科技交换机使用手册速查版本 1.0目录1. 硬件连接、常规设置与维护 (3)1.1 硬件安装 (3)1.2 硬件介绍 (3)1.3 常规设置 (5)2. 常规维护 (10)3. 高级设定 (12)3.1 VLAN设定 (12)3.2 STP(生成树协议)设置 (22)3.3 Access Control List (访问控制列表) (26)3.4 ES-3124_ACL功能完成IP与MAC的绑定 (30)3.5 ES-3124_Link Aggregation设置 (34)3.6 IGMP Snooping(组播侦听) (36)3.7 Static MAC Forwarding(静态MAC地址转发) (37)3.8 Filtering (过滤器) (37)3.9 Broadcast Storm Control (广播风暴控制) (37)3.10 Mirroring (端口镜像) (38)3.11 DHCP Relay (39)1. 硬件连接、常规设置与维护本章节介绍硬件连接方法,常规设置和基本维护方法,能够帮助您快速安全的将交换机接入网络。
1.1 硬件安装1.1.1 独立式安装:您可以将随机配备的绝缘脚垫安装到交换机底部,并将交换机置放到安全、干燥、清洁的环境中。
图-11.1.2 机架式安装(1)将随机配备的安装部件牢固的固定在交换机两侧。
如下图所示:图-2(2)利用安装部件将交换机牢固的安装在您的机架上。
如下图所示:注释: 合勤科技交换机系列,ES-2024A/ ES-3124/ ES-3148/ GS-2024/ ES-1528/ ES-1552/ GS-1524/ GS-1548都是标准的19英寸长度设计。
图-31.2 硬件介绍合勤交换机前面板的设计大体相似, 左侧是10/100/1000Mbps以太网接口,或者SFP光口。
右侧通常是上联端口,1000Mpbs的以太网接口或者SFP光口,或者是以太网和SFP双重属性端口。
迈普3000_端口操作命令
第 5 章 LLDP 功能命令 ................................................. 21
5.1 lldp enable ....................................................................................... 21 5.2 lldp enable(端口) ......................................................................... 21 5.3 lldp mode ......................................................................................... 21 5.4 lldp tx-interval.................................................................................. 22 5.5 lldp msgTxHold ............................................................................... 22 5.6 lldp transmit delay .......................................................................... 23 5.7 lldp notification interval.................................................................. 23 5.8 lldp trap............................................................................................ 23 5.9 lldp transmit optional tlv................................................................. 24 5.10 lldp neighbors max-num............................................................... 24 5.11 lldp tooManyNeighbors................................................................. 24 5.12 show lldp........................................................................................ 25 2
llama_index prompthelper 参数
LlamaIndex是一个开源框架,用于通过Retrieval Augmented Generation(RAG)管道为大型语言模型(LLM)增加自定义数据源。
在搭建聊天机器人时,LlamaIndex的PromptHelper模块可以为我们提供便利。
以下是LlamaIndex PromptHelper模块的一些关键参数:1. `llama_index_api_key`:此参数用于配置OpenAI API密钥。
在使用LlamaIndex之前,请确保获取合适的API密钥,并将其添加到应用程序的secrets.toml文件中。
2. `llama_index_model_name`:此参数用于指定要使用的LLM模型。
目前,LlamaIndex 支持多种模型,如GPT-3.5。
您可以根据需求选择合适的模型。
3. `llama_index_search_engine`:此参数用于配置检索引擎。
LlamaIndex支持多种检索引擎,如Analyzer、Elasticsearch等。
根据您的需求选择合适的检索引擎。
4. `llama_index_data_source`:此参数用于指定自定义数据源。
您可以将企业内部知识库或其他数据源添加到此参数中,以增强LLM模型的回答精度。
5. `llama_index_prompt_helper`:此参数用于启用或禁用PromptHelper功能。
当设置为`True`时,LlamaIndex将使用PromptHelper模块为您生成更准确的回答。
6. `llama_index_max_tokens`:此参数用于限制LLM模型的生成回答的最大令牌数。
根据您的需求调整此参数,以控制回答的长度。
7. `llama_index_top_p`:此参数用于控制LLM模型生成回答时的Top-p概率。
您可以根据需求调整此参数,以控制回答的多样性。
8. `llama_index_temperature`:此参数用于控制LLM模型生成回答时的温度。
UVM1.1应用指南及源代码分析_20111211版
而后半部分(第 10 到第 19 章)则介绍 UVM 背后的工作原理,用户群相对稀少。 通常来说,一般的用户只要看懂前半部分就可以了。但是我想,世上总有像我一样 有好奇心的人,不满足知其然再不知其所以然,会有人像我一样,会因为一个技术 问题而彻夜难眠,如果你是这样的人,那么恭喜,这本书的后半部分就是为你准备 的。
UVM1.1 应用指南及 源代码分析
UVM1.1 Application Guide and Source Code Analysis
张强 著
在这里,读懂 UVM
序
写这本书的难度超出了我的预料。从 8 月初开始写,一直到现在,4 个多月的 时间,从刚开始的满含激情,到现在的精疲力尽。现在写出来的东西,距离我心目 中的作品差距十万八千里,有太多的地方没有讲述清楚,有太多的地方需要仔细斟 酌,有太多的语句需要换一种表述方式。
8. register model的使用 ..............................................................................................125
8.1. register model简介...................................................................................125
写这本书,只是想把自己会的一点东西完全的落于纸上。在努力学习 UVM 的 过程中,自己花费了很多时间和精力。我只想把学习的心得记录下来,希望能够给 后来的人以启发。如果这本书能够给一个人带来一点点的帮助,那么我的努力就不 算是白费。
这本书的前半部分(第 1 到第 9 章)介绍了 UVM 的使用,其用户群较为广泛;
TCAD Sentaurus introduction 2014
Sentaurus Lithography Sentaurus Topography
Structure Editing
Sentaurus Workbench Sentaurus Structure Editor
Sentaurus Device
Device and Interconnect Simulation
• New Technology Support
– More Moore
– – FinFET, FDSOI, III-V, etc. Analog/RF, CIS, solar, power (Si, SiC, GaN), TSV, etc.
– More than Moore
• 3D Support (FinFET, NVM, Power, SRAM, CIS)
Diffusion Model Hierarchy
• • • • • • • Constant (constant diffusion coefficient) Fermi (point defects equation not solved, defects in equilibrium) Charged Fermi (same as Fermi+total dopant flux is due to dopant-defect pairs) Pair (dopant-defects pairs are in local equilibrium with dopant and defect concentrations) Charged Pair (same as Pair+reaction rates are state charge dependent) React (incl.defects, rates are not charge state dependent) Charged React (same as React+mobile charged dopant-defects)
MiniRAE 3000 + VOC 监测器说明书
The MiniRAE 3000 + is a comprehensive handheld VOC (Volatile Organic Compound) monitor that uses a third-generation patented PID technology to accurately measure one of the highest levels of ionizable chemicals available on the market. The MiniRAE 3000 + is a comprehensivehandheld VOC (Volatile Organic Compound) monitor that uses a third-generation patented PID technology to accurately measure one of the highest levels of ionizable chemicals available on the market.It provides full-range measurement from 0 to 15,000 ppm of VOCs.The MiniRAE 3000 + has a built-in wireless modem that allows real-time data connectivity with the command center located up to 2 miles (3 km) away through a Bluetooth connection to a RAELink 3* portable modem or optionally via Mesh Network.•Highly accurate VOC measurements •Reflex PID Technology TM•Low maintenance—easy access to lamp and sensor •Low cost of ownership •3-year 10.6eV lamp warranty•BLE module & dedicated APP for Enhanced Datalogging capability•Third-generation patented PID technology •Reflex PID Technology TM•VOC detection range from 0 to 15,000 ppm •3-second response time•Humidity compensation with built-in humidity and temperature sensors •Six-month datalogging•Highly connectivity capability through multiple wireless module options•Large graphic display with integrated flashlight•Multi-language support with 10 languages encoded •IP- 67 waterproof design•Oil and Gas •HazMat•Industrial Safety •Civil Defense•Environmental and Indoor Air QualityF E AT U R E S & B E NE F I T SA PPLIC AT IO N SWorkers can quickly measure VOCs and wirelessly transmit dataMiniRAE ® 3000 +Portable Handheld VOC MonitorProvided by: (800)404-ATECAdvanced Test Equipment Rentals®For more informationEurope, Middle East, AfricaLife Safety Distribution GmbHTel: 00800 333 222 44 (Freephone number)Tel: +41 44 943 4380 (Alternative number)Middle East Tel: +971 4 450 5800 (Fixed Gas Detection) **************************MONITOR ONLY INCLUDES:• MiniRAE 3000 + Monitor, Model PGM-7320• Wireless communication modulebuilt in, as specified• Datalogging with ProRAE Studio II Package• Charging/download adapter• RAE UV lamp, as specified• Flex-I-Probe™• External filter• Rubber boot• Alkaline battery adapter• Lamp-cleaning kit• Tool kit• Soft leather caseOPTIONAL CALIBRATION KIT ADDS:• 100 ppm isobutylene calibration gas, 34L• Calibration regulator and flow controllerOPTIONAL GUARANTEEDCOST-OF-OWNERSHIP PROGRAM:• 4-year repair and replacement warranty• Annual maintenance service1 Contact RAE Systems for country-specificwireless approvals and certificates.Specifications are subject to change.AmericasHoneywell Analytics Distribution Inc.Tel: +1 847 955 8200Toll free: +1 800 538 0363***********************Honeywell RAE SystemsPhone: +1 408 952 8200Toll Free: +1 888 723 4800Asia PacificHoneywell Analytics Asia Pacific Tel:+82 (0) 2 6909 0300India Tel: +91 124 4752700China Tel: +86 10 5885 8788-3000**************************Technical ServicesEMEA:**********************US:***************************AP:*************************** Datasheet_MiniRAE 3000_+_DS-1018-_EN©2018 Honeywell International Inc.。
无线model怎么设置整理

让知识带有温度。
无线model怎么设置整理无线model怎么设置一开头买到路由器,可能大家都不太懂怎么设置,不同路由器从界面到配置细节都不一样,很简单搞得头都大了,设置路由器是接触网络的第一步,我跟大家共享一下路由器的设置方法,让大家这第一步走顺畅了。
假如是TP-Link无线路由,请按以下步骤修改无线密码注:请看完全文再进行操作,操作前请备好网线,防止无线设备(指电脑)无法访问路由器,Intel的无线设备(即迅驰)请误将软件驱动升级至10.1.1.3以上版本,否则TP-Link将无法识别路由器部分设置:(路由器地址及访问密码只供应默认值请自行替换自己设置的`值)1.打开扫瞄器在地址栏输入192.168.1.1回车弹出密码提示窗2.在密码提示窗输入用户名和密码(默认都为admin,如有出入在路由器下面应当已给出相应值)并按确定。
此时弹出设置向导并打开设置界面两张网页,设置向导可以关闭,接下来进入详细无线设置部分3.单击左面列表的“无线参数”进入“无线网络基本设置”页面4.在右页面可以观察一些基本参数SSID号可以填入自己喜爱的名字也可不作修改,修改目的是便于在无线设备设置时与别人的无线路由进行区分频段在四周有多个第1页/共3页千里之行,始于足下。
无线路由时修改(一般相对于别人路由频段+-3进行设置,不建议使用13频段,由于部分带wifi功能的手机或PDA无法识别该频段)确定开启无线功能;开启平安设置已打钩(允许SSID广播建议初级玩家打勾,防止自己遗忘路由器SSID号,造成不必要的麻烦),进行密码设置一般家用网络平安类型选择WEP,平安选项选择“自动选择”,密钥格式选择:“ASCII码”(16进制较麻烦,很难记住密码)在密匙1后面的密钥类型选择一个相应值(建议128位)在密匙内容对应的框中填入自己的密码,留意字符个数不能多也不能少选择64位密钥需输入16进制数字符10个,或者ASCII码字符5个。
HOBBYWING 高性能无刷系统用户指南说明书
Progammable Items3Cont./Peak CurrentMotor Type200A / 1080ASensored / Sensorless Brushless MotorsMode XERUN XR8 PRO G304Specifications06ESC Setup01DisclaimerNote: If the forward and backward is reverse after installing the motor, please modify “no. 1J” parameters “Motor Rotation” to change the direction.If the 1K parameter item "Phase-AC Swap" is set to "Enabled", then the # A of the esc needs to be connected to the # C of the motor.B. Sensorless Motor Wiring:Users do not need to be worried in r egards to the connectivity with the A/B/C(ESC and motor) as ther e is no polarity. You may find it necessary to swap two wir es if the motor runs in reverse.2. Receiver Wiring:Insert the throttle control flat cable of ESC into the throttle channel (i.e. THROTTLE channel) of the receiver. Since the red line in the flat cable outputs BEC voltage to the receiver andsteering servo. Please do not supply additional power to the receiver, otherwise the electric adjustment may be damaged. If additional power is required, disconnect the redwire on the throttle plug from the ESC.3. Battery Wiring:Please make sure that the (+) pole of the ESC is connected to the (+) of the battery, and the (-) pole is connected to the (-). If connect reversely, the ESC cannot start up. (Add the picture ofconnecting battery here.)4. External Capacitor Module (also called Cappack )Wiring (Optional):Generally, for 1/8 Buggy and 1/10 vehicles, there is no need for external capacitor pack; But for 1/8 on-road racing, due to the high load current, it is necessary to solder the standardcapacitor pack to the input end of the esc (which can be soldered together with the input wires to the gold plug of the esc), as shown in the figure above.Warning! Make sure that the red/positive (+) of the capacitor pack is connected to the red/positive (+) of the esc, and the black/negative (-) is connected to the black /negative (-). Do not connect them incorrectly, otherwise the capacitor pack will be damaged.Warning! This is an extremely powerful system. For your safety and the safety of those around you, we strongly recommend removing the pinion gear attached to the motorbefore calibrating and setting this system. It is also advisable to keep the wheels in the air when you turn on the ESC.1) Illustration of power on/off: Short press the ON/OFF key to turn on the ESC in the off state, and long press the ON/OFF key to turn off the ESC.2) Beep illustration when turn on the ESC: When turn on ESC under normal conditions (i.e. it is started without pressing the SET key), the motor will emit several Beeps to indicate the LiPocells. For example, “Beep, Beep, Beep” means 3S, “Beep, Beep, Beep, Beep” means 4S.Power on/off and Beep illustration208Trouble ShootingIn order to make one firmware applicable to all different racing conditions, there are 3 groups of preset modes in the ESC. Users are able to change the settings of the modes provided andmatch suitable gear ratio. Plug-and -screw. Users can change the settings as per the control feel, track, and rename the setting mode. For example, the name can be changed from “1/8Off-Road” to “NC2020-1900” to indicate the NC2020 uses 1900KV. This can be saved for future reference as well.07Explanation for LED status1. During the Start-up Process• The red light flashes quickly while the motor beeps: the esc has not detect the neutral of the throttle. (the neutral of the throttle does not match the transmitter)• The GREEN LED flashes “N” times indicating the number of LiPo cells you have connected to the ESC.2. In Operation• The throttle triggle is at the neutral:1) In the normal mode(Non blinky mode),the RED LED turns on soild.2) In the blinky mode(Non RPM limit mode), the boost timing and turbo timing are 0, the RED LED will blink.• Forward: The RED LED dies out and the GREEN LED blinks when your vehicle runs forward. The GREEN LED turns solid when pulling the throttle trigger to the full (100%) throttle endpoint.• Brake: The RED LED dies out and the GREEN LED blinks when you brake your vehicle. The GREEN LED turns solid when pushing the throttle trigger to the full brake endpoint and settingthe ”Max. Brake Force” to 100%.• Backward: The RED LED dies out, the GREEN LED blinks when you reverse your vehicle. The GREEN LED turns solid when pushing the throttle trigger to the full brake endpoint and settingthe ”reverse force” to 100%.3. When Some Protection is Activated• The RED LED flashes a short, single flash and repeats “☆, ☆, ☆” indicating the low voltage cutoff protection is activated.• The GREEN LED flashes a short, single flash and repeats “☆, ☆, ☆” indicating the ESC thermal protection is activated.• The GREEN LED flashes a short, double flash and repeats “☆☆, ☆☆, ☆☆” indicating the motor thermal protection is activated.• The GREEN LEDS flash a short, single flash and repeats “☆☆☆, ☆☆☆, ☆☆☆” indicating that the load of ESC is heavy, the Over-Current protection is activated.• The GREEN LEDS flash a short, single flash and repeats “☆☆☆☆☆,☆☆☆☆☆,☆☆☆☆☆” indicating that the temperature of ESC and capacitor is too high, the thermal protectionof capacitor is activated.Preset Modes for Different Racing:Here is the method of setting parameters of ESC:Note! This ESC has a separate programming port. Please don’t connect the throttle control cable to the program box or OTA programmer, otherwise it does not work.1) LCD G2 programming box set the parameters: (Please refer to the instructions of LCD G2 programming box for detailes)item. You can adjust the setting via “ITEM” & “VALUE” buttons, and press the “OK (R/P)” button to save new settings to your ESC.2) Use OTA Programmer to set parameters (Please refer to instructions of OTA Programmer for details)This ESC supports the use of OTA Bluetooth module, that is, plug the programming wire of OTA Programmer to theprogramming port. Then use mobile phone to install HOBBYWING HW LINK App to set parameters.3) Data Logging:1) The ESC is able to record the Maximum Temperature of ESC and Motor, Minimum Battery Voltage, Maximum Motor RPM and MaximumCurrent in running. It automatically saves the recorded data to the designated area when you turn off the ESC after a run. You can checkthose data via a multifunction LCD G2 program box. Users need to switch on the ESC after the esc is connected with the program box.Long Press the “OK(R/P)” button on any “item” page, then press the “ITEM” button, the following 5 item pages will be displayed:Mode → ESC Temperature → Motor Temperature → Min Voltage → Max RPM → Max Current2) The ESC running data is read through the OTA Bluetooth module.After connecting the OTA Bluetooth module to the esc and establishing communication, you can view not only the five extreme value data recorded above, but also the real-timerunning data and historical record data (graph) in the [Data Log] menu in HW link app.Programming:5Here is the method of restore factory reset:1) Restore the default values with a multifunction LCD G2 program boxAfter connecting the program box to the ESC, continue to press the “ITEM” button on the program box until you see the “RESTORE DEFAULT” item, and press “OK (R/P)” to factory reset your ESC.2) Restore the default values with a OTA Programmer (Use HW Link mobile phone App)Connect OTA Programmer to the ESC, enter into【Parameters】, click “reset” to factory reset your ESC.Factory reset6Preset modes41A: Running ModeOption 1: Forward with BrakeRacing mode. It has only forward and brake functions.Option 2: Forward/ Reverse with BrakeThis option is known to be the “training”mode with “Forward/Reverse with Brake” function. The vehicle only brakes on the first time you push the throttle trigger to the reverse/brake zone.Ifthe motor stops when the throttle trigger return to the neutral zone and then re-push the trigger to reverse zone, the vehicle will reverse, if the motor does not completely stop, then yourvehicle won’t reverse but still brake, you need to return the throttle trigger to the neutral zone and push it to reverse zone again. This method is for preventing vehicle from being accidentallyreversed.Option 3: Forward and ReverseThis mode is often used by special vehicles. The vehicle will reverse immediately when you push the throttle triggle to the reverse zone.1B: Max. Reverse Force:The reverse force of the value will determine its speed. For the safety of your vehicle, we recommend using a low amount.1C: Lipo Cells:Auto Calculation is the default setting. If Lipo batteries are often used with the same cell count,we would recommend setting the Lipo cells manually to avoid the incorrect “Calculation”(Forexample,the esc may take a not fully charged 3S Lipo as a fully 2S Lipo) ,which may cause the low-voltage cutoff protection to not function ideally.1D: Cutoff Voltage:The ESC will monitor the battery voltage all the time, once the voltage is lower than the threshold value, the ESC will reduce the power to 50% instantly and cutoff the power output in 40seconds. When enters into voltage protection, the RED LED will single flash that repeats (☆, ☆, ☆, ☆…….). Please set the “Cutoff Voltage” to “Disabled” or customized protection thresholdvalue if you are using NiMH batteries.Option 1: DisabledThe ESC does not cut the power off due to low voltage. We do not recommend using this option when you use any LiPo battery as you will irreversibly damage the product. It is suggested toset to “Disabled”(But the battery would be damaged due to overcharged)Option 2: AutoThe ESC calculates the corresponding cutoff voltage as per the number of LiPo cells it detects and the “3.5V/cell” rule. For example, if the ESC detects a 4S, the cutoff voltage protectionthreshold value is 3.5x4=14.0V.Option 3: CustomizedThe customized cutoff threshold is a voltage for the whole battery pack (adjustable from 5.0V to 13.6V). Please calculate the value as per the number of LiPo cells you are using. For example,when you use a 4S and you want the cutoff voltage for each cell is 3.0V, you will need to set this item to 12V(3.0*4)1E: ESC Thermal Protection:The output from the ESC will be cut off with the value you have preset. The GREEN LED flashes (☆, ☆, ☆) when the ESC temperature reaches to the preset value. The output will not resumeuntil the ESC temperature gets down.Warning! Please do not disable this function unless you’re in a competition. Otherwise the high temperature may damage your ESC and even your motor.1F: Motor Thermal Protection:The GREEN LED flashes (☆☆, ☆☆, ☆☆) when the motor temperature reaches to the preset value. The output will not resume until the motor temperature gets down.Warning! Please do not disable this function unless you’re in a competition. Otherwise the high temperature may damage your motor and even your ESC. For non-Hobbywingmotor, the ESC may get this protection activated too early/late because of the different temperature sensor inside the motor. In this case, please disable this function andmonitor the motor temperature manually.1G: BEC Voltage:It supports 6.0V/7.4V adjustable. 6.0V is applicable to common servo. If use high-voltage servo, set to higher voltage according to voltage marking of servo.Note: 1. Do not set the BEC voltage above the maximum operating voltage of the servo, as this may damage the servo or even the ESC.2. Due to the characteristics of the BEC circuit, there is a voltage difference between the BEC output voltage and the input voltage,when the BEC voltage is set to 7.4Vand 2S Lipo is used,the BEC cannot stably output 7.4V (will decrease as the battery voltage decreases) .Therefore,it is recommended to use 7.4V BEC when matchingwith 3S Lipo and above.1H: Smart Fan:The fan of this esc has intelligent running function.If this item is set to "Enabled", the fan will not run when the internal temperature of the esc is below 50℃/122℉,and will start runningwhen the internal temperature is above 50℃/122℉. If this item is set to "Disabled", the fan will continue to run regardless of temperature.1I: Sensor Mode:Option 1: Full SensoredIf use XERUN 4268/74-G2/G3 motor, it can set to full sensor mode. The power system will work in the “sensored” mode at all times. The efficiency and drivability of this mode is at the highest.And Boost、Turbo timing can be used and get erupting power.Option 2: Sensored/Sensorless HybridThis is universal driving mode of current 1:8 power system. The ESC operates the motor in sensored mode during the low-speed start-up process, followed by switching to operating the motorin the “sensorless” mode when the RPM is increased.1J: Motor Rotation:With the motor shaft faces you (the rear end of the motor is away from you), increase the throttle input, the motor (shaft) will rotate in the CCW/CW direction if the “Motor Rotation/Direction”set to “CCW/CW”. Generally, the vehicle runs forward when the motor (shaft) rotates in the CCW direction. However, some vehicles only run forward when the motor rotates in the CW directiondue to the different chassis design. In that case, you only need to set the “Motor Rotation/Direction” to “CW”.1K: Phase-AC Swap:If the A/C wire of ESC connect to A/C wire of motor with crossed way (A wire of ESC connects to C wire of motor, C wire of ESC connects to A wire), set this item as Enable., the throttle output at the early stage will be higher (than the output when the curve is linear); if it is adjusted to –EXP, the throttleNote: The rpm limit value here is the rpm corresponding to the 2 pole motor,when using a 4 pole motor (such as 4268 motor), the corresponding rpm shall be divided by 2.3B: Max. Brake Force:This ESC provides proportional braking function; the braking effect is decided by the position of the throttle trigger. It sets the percentage of available braking power when full brake isapplied. Large amount will shorten the braking time but it may damage your pinion and spur.3C: Brake Rate ControlIt’s adjustable from 1 to 20 (step: 1), the lower the brake rate, the more limit on the brake response. A suitable rate can aid the driver to brake his vehicle correctly. Generally, you can setit to a high value to have a quick brake response.3D: Brake ControlOption 1: TraditionalIn this mode, just like traditional braking method we currently use, due to its braking force being affected by the motor speed, can cause the braking not being linear/smooth.Option 2: Disc BrakeThis is an innovative braking method from HOBBYWING, the braking force is not affected by the motor speed, with better braking linearity and stronger braking force.3E: ABS ForceThis parameter is used to set the brake force when the speed is relatively low,the higher the value,the greater the brake force.Setting this value appropriately according to the traction isbeneficial for preventing wheel lockup and sliding,and it will help to control the vehicle when entering the corner.Note: This parameter only takes effect when the "Brake Control" is set to "Disc Brake".3F: Disc Brake CurvatureThis parameter is used to set the braking curve in disc brake mode. The higher the curvature, the greater the braking force in the front section;The smaller the curvature, the smaller the braking force in the front section. It can be set according to personal control habits.Note: This parameter only takes effect when the "Brake Control" is set to "Disc Brake".3G: Brake FrequencyThe brake force will be larger if the frequency is low; you will get a smoother brake force when the value is higher, please choose the frequenciesas per the actual test results of your vehicles.Note: This parameter only takes effect when the "Brake Control" is set to "Traditional".4A: Boost Timing:It is effective within the whole throttle range; it directly affects the car speed on straightaway and winding course. The ESC adjusts the timingdynamically as per the throttle amount in the operation. The Boost Timing is not constant but variable.5A: Turbo Timing:This item is adjustable from 0 degree to 48 degrees, the corresponding turbo timing (you set) will initiate at full throttle. It’s usually activatedon long straightaway and makes the motor unleash its maximum potential.5B: Turbo Delay:When “TURBO DELAY” is set to “INSTANT”, the Turbo Timing will be activated right after the throttle trigger is moved to the full throttle position. When other value(s) is applied, you willneed to hold the throttle trigger at the full throttle position (as you set) till the Turbo Timing initiates.5C: Turbo Increase Rate (deg / 0.1sec):This item is used to define the “speed” at which Turbo Timing is released when the trigger condition is met. For example, “6 degs / 0.1sec” refers to the Turbo Timing of 6 degrees thatwill be released in 0.1 second. Both the acceleration and heat is higher when the “Turbo increase rate” is of a larger value.5D: Turbo Decrease Rate (deg/0.1sec):After the Turbo Timing is activated and the trigger condition turns to not be met (i.e. vehicle slows down at the end of the straightaway and gets into a corner, full throttle turns to partialthrottle, the trigger condition for Turbo Timing turns to be not met), if you disable all the Turbo Timing in a moment, an obvious slow-down like braking will be felt and cause the controlof vehicle to become bad. If the ESC can disable the Turbo Timing at some “speed”, the slow-down will be linear and the control will be improved.Warning! Boost Timing & Turbo Timing can effectively improve the motor efficiency; they are usually used in competitions. Please take some time to read this manual andthen set these two items carefully, monitor the ESC & motor temperatures when you have a trial run and then adjust the Timing and FDR accordingly as aggressive Timingsand FDR may cause your ESC or motor to be burnt.Note: Only when paired with the Hobbywing matching motor (such as XERUN 4268 G3), Boost and Turbo can achieve a maximum 48 degree effect.Diagram of Disc Brake Curvature XERUN XR8 PRO G3USER MANUALBrushless Electronic Speed Controller• Built-in 3 common profiles, suitable for all 1/8 Racing, select and use instantly. (e.g. Zero timing-Blinky mode, 1/8 Off-Road Racing, 1/8 On-Road Racing mode).• There are 32 built-in adjustable parameters to set various power requirements. The parameters can be imported and exported, which is convenient for drivers to communicate with and learnfrom each other.• Support the firmware upgrade of the ESC (The multi-function LCD G2 programming box or OTA Programmer is needed to purchase). You can enjoy the latest functions.• Built-in switch mode BEC with a maximum output of 12A and 6V/7.4V adjustable for usage with servos & other devices require different voltages.• The built-in reverse connection protection circuit of the ESC avoid the damage to the ESC due to reverse connection.• Data logging function to view various running data on the HW LINK app using the OTA Bluetooth module.Note: The PWM Drive Frequency, Brake Control, Brake Frequency, Boost Timing, Turbo Timing and relevant items are not programmable (that's item 2F, 3D, 3G and items from 4A to 5D are notprogrammable) when Sensor Mode (Item 1I) is set to "Sensored/Sensorless Hybrid".。
PCV-2V压力释放阀,直接操作手动可调说明书

w e e n g i n e e r y o u r p r o g r e s sTable of Contents1 Product Details .....................................................................................................................................................................................2 1.1 Application ............................................................................................................................................................................................. 2 1.2 Recommended Installation .................................................................................................................................................................... 2 2 Function ................................................................................................................................................................................................ 2 2.1 Features ................................................................................................................................................................................................. 23 Technical Data ...................................................................................................................................................................................... 34 Ordering Information ........................................................................................................................................................................... 3 4.1 Type Code ............................................................................................................................................................................................. 3 4.2Versions currently available (3)5 Description of Characterisics in Accordance with Type Code ........................................................................................................ 4 5.1 Characteristic 1: Variant DSU ................................................................................................................................................................ 4 5.2 Characteristic 2: Port / Case: Variant CA - Cartridge ............................................................................................................................. 4 5.3 Characteristic 3: input flow rate .............................................................................................................................................................. 4 5.4 Characteristic 4: Max.permissible pressure ........................................................................................................................................... 4 5.5 Characteristic 5: Activation / Setting ...................................................................................................................................................... 4 5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4) ......................................................................................... 4 Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteil und wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt. ..................................................................................................................................................................................................... 4 5.7 Characteristic 7: Seal ............................................................................................................................................................................. 4 6 Installation ............................................................................................................................................................................................ 5 6.1 General information ............................................................................................................................................................................... 5 6.2 Connection Recommendations .............................................................................................................................................................. 5 6.3 Installation - installation space ............................................................................................................................................................... 5 7 Notes, Standards and Safety Instructions ......................................................................................................................................... 5 7.1 General Instructions ............................................................................................................................................................................... 5 7.2 Standards ............................................................................................................................................................................................... 58 Zubehör .................................................................................................................................................................................................5w e e n g i n e e r y o u r p r o g r e s s1The pressure valve is designed as cartridge valve. It is a direct operated valve for flow rates up to 10 l / min, which can be adjusted manually. The adjustment can be protected by a cap. The components are designed robust. The valve can be charged up to 500 bar and is delivered at a certain pressure.1.1 ApplicationThe pressure valve is used to protect high volume lift cylinders in truck cranes. It should avoid excessive pressure increase in unmoving cylin-ders due to warming (“sushine valve”).1.2 Recommended Installation2 FunctionThe pressure valve operates as a direct acting seat valve. The pressure can be set using an adjusting screw. The screw is locked after adjustment with a backup sealing nut and can be protected by a cap.2.1 Features▪ Cartridge type▪ Small installation space ▪ Robust construction▪Stepped cavity (corresponds to Bucher UVP-4) ▪Seat valve, leakage freeP – protected port T - tankw e e n g i n e e r y o u r p r o g r e s s3 Technical Data4 4.1 Type CodeXXX – fest vorgegebene Merkmale XXX – vom Kunden wählbare Merkmale4.2 Versions currently availableThe versions listed below are available as standard. Further versions as part of the options given on the type code can be configured upon request.designationtype codepart nr.PRV –DSU –CA -10LPM -500BAR –MAN230BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN230 –239 -N 412.072.451.9 PRV –DSU –CA -10LPM -500BAR –MAN235BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN235 –239 -N 412.072.430.9 PRV –DSU –CA -10LPM -500BAR –MAN290BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN290 –239 -N 412.072.433.9 PRV –DSU –CA -10LPM -500BAR –MAN340BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN340 –239 -N 412.072.431.9 PRV –DSU –CA -10LPM -500BAR –MAN420BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN420 –239 -N 412.072.432.9CriteriaUnit Value Installation position any Weightkg 0,1Surface protectiveZinc coated Maximum input pressure (P) bar 550Adjustable pressurebar 100 - 500 Maximum Tankpressure (T) bar 8 Maximum input flow rate (P) l/min 10Hydraulic fluidMineral oil (HL, HLP) conforming with DIN 51524, other fluids upon re-Hydraulic fluid pressure range °C -25 bis +80 Ambient temperature °C < +50 Viscosity rangemm2/s 2,8 - 500Contamination gradeFiltering conforming with NAS 1638, class 9, with minimum retentionPRVDSUCA10500239N000102030405060700 Product group Pressure relief valves PRV 01 Variant manual adjustable DSU 02 Port / Case Cartridgeventil CA 03 Input flow rate Qmax.10 l/min 1004 Max.permissible pressure Pmax.. 500bar50005 Activation Man ually adjustable 100-500barMAN100 06 Stepped cavity WESSEL-Patrone 8.00239 (stepped cavity) 239 07 Seal NBR, temperatur range -25°C bis +80°CNw e e n g i n e e r y o u r p r o g r e s s5 5.1 Characteristic 1: Variant DSUAdjustable pressure relief valve5.2 Characteristic 2: Port / Case: Variant CA - CartridgeAs variant CA, the valve is delivered as a cartridge valve. The Cavity has to be designed according to characteristic 6 (stepped cavity)5.3 Characteristic 3: input flow rateRecommended maximum flow rate of 10 l/min.5.4 Characteristic 4: Max.permissible pressureMaximum permissible pressure is 500bar (adjustable range100 - 500bar)5.5 Characteristic 5: Activation / SettingThe valve can be adjusted with a set screw. For this purpose, the protective cap must be removed and the counter nut undone.5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4)Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteilund wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt.5.7 Characteristic 7: SealNBR, temperature range -25°C bis +80°Cw e e n g i n e e r y o u r p r o g r e s s6 Installation6.1 General information▪ Observe all installation and safety information of the construction machine / attachment tools manufacturer. ▪ Only technically permitted changes are to be made on the construction machine. ▪ The user has to ensure that the device is suitable for the respective application. ▪ Application exclusively for the range of application specified by the manufacturer. ▪ Before installation or de-installation, the hydraulic system is to be depressurized. ▪ Settings are to be made by qualified personnel only.▪ Opening is only to be performed with the approval of the manufacturer, otherwise the warranty is invalidated.6.2 Connection RecommendationsNOTE : Enclosed proposed resolution is not always guaranteed. The functionality and the technical details of the construction ma-chine must be checked.5.3 Montage – BauraumObserve connection names.Do not damage seals and flange surface. Its hydraulic system must be ventedEnsure sufficient free space for setting and installation work6.3 Installation - installation space▪ Observe connection names.▪ Do not damage seals and flange surface. ▪ Its hydraulic system must be vented▪ Ensure sufficient free space for setting and installation workCAUTION: Hydraulic hoses must not touch the pressure relief valve, otherwise they are subject to thermal damaging. Tightening torques must be observed. Torque wrench needed.77.1 General Instructions▪The views in drawings are shown in accordance with the European normal projection variant▪ A comma ( , ) is used as a decimal point in drawings ▪All dimensions are given in mm7.2 StandardsThe following standards must be observed when installing and operating the valve:▪ DIN EN ISO 13732-1:2008-12, Temperatures on accessible surfaces8 ZubehörSafety cap: 275.066.000.6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BrochureMore information from /reports/2171649/Modelling the Wireless Propagation Channel. A simulation approach with Matlab. Wireless Communications and Mobile ComputingDescription: A practical tool for propagation channel modeling with MATLAB® simulations.Many books on wireless propagation channel provide a highly theoretical coverage, which for someinterested readers, may be difficult to follow. This book takes a very practical approach by introducing thetheory in each chapter first, and then carrying out simulations showing how exactly put the theory intopractice. The resulting plots are analyzed and commented for clarity, and conclusions are drawn andexplained from the obtained results.Key features include:A unique approach to propagation channel modeling with accompanying MATLAB® simulations todemonstrate the theory in practiceContains step by step commentary and analysis of the obtained simulation results in order to provide acomprehensive and structured learning toolCovers a wide range of topics including shadowing effects, coverage and interference, MultipathNarrowband channel, Multipath Wideband channel, propagation in micro and pico–cells, the land mobilesatellite (LMS) channel, the directional Multipath channel and MIMO and propagation effects in fixed radiolinks (terrestrial and satellite)The book comes with an accompanying website that contains the MATLAB® simulations and allows readersto try them out themselvesWell suited for lab–use, as reference and as a self–learning tool both for advanced students andprofessionalsModeling the Wireless Propagation Channel: A simulation approach with MATLAB® will be best suited forpostgraduate (Masters and PhD) students and practicing engineers in telecommunications and electricalengineering fields, who are seeking to familiarise themselves with the topic without too many formulas. Thebook will also be of interest to network engineers, system engineers and researchers.Contents:ContentsAbout the Series EditorsPrefaceAcknowledgments1Introduction to Wireless Propagation1.1 Introduction1.2 Wireless Propagation Basics1.3 Link Budgets1.4 Projects1.5 SummaryReferencesSoftware Supplied2Shadowing Effects2.1 Introduction2.2 Projects2.3 SummaryReferencesSoftware Supplied3Coverage and Interference3.1 Introduction3.2 Hata Model3.3 Projects3.4 SummaryReferencesSoftware Supplied4Introduction to Multipath4.1 Introduction4.2 Projects4.3 SummaryReferencesSoftware Supplied5Multipath: Narrowband Channel5.1 Introduction5.2 Projects5.3 SummaryReferencesSoftware Supplied6Shadowing and Multipath6.1 Introduction6.2 Projects6.3 SummaryReferencesSoftware Supplied7Multipath: Wideband Channel7.1 Introduction7.2 Deterministic Multiple Point–Scatterer Model 7.3 Channel System Functions7.4 Stochastic Description of the Wireless Channel 7.5 Projects7.6 SummaryReferencesSoftware Supplied8Propagation in Microcells and Picocells8.1 Introduction8.2 Review of Some Propagation Basics8.3 Microcell and Picocell Empirical Models8.4 Projects8.5 SummaryReferencesSoftware Supplied9The Land Mobile Satellite Channel9.1 Introduction9.2 Projects9.3 SummaryReferencesSoftware Supplied10The Directional Wireless Channel10.1 Introduction10.2 MIMO Systems10.3 Projects10.4 SummaryReferencesSoftware SuppliedIndexOrdering:Order Online - /reports/2171649/ Order by Fax - using the form belowOrder by Post - print the order form below and send toResearch and Markets,Guinness Centre,Taylors Lane,Dublin 8,Ireland.Fax Order FormTo place an order via fax simply print this form, fill in the information below and fax the completed form to 646-607-1907 (from USA) or +353-1-481-1716 (from Rest of World). If you have any questions please visit/contact/Order Information Please verify that the product information is correct.Product Format Please select the product format and quantity you require:* Shipping/Handling is only charged once per order.Contact InformationPlease enter all the information below in BLOCK CAPITALSProduct Name:Modelling the Wireless Propagation Channel. A simulation approach with Matlab.Wireless Communications and Mobile Computing Web Address:/reports/2171649/Office Code:SCD2KSXH QuantityHard Copy (HardBack):USD 121 + USD 29 Shipping/HandlingTitle:MrMrsDrMissMsProf First Name:Last Name:Email Address: *Job Title:Organisation:Address:City:Postal / Zip Code:Country:Phone Number:Fax Number:* Please refrain from using free email accounts when ordering (e.g. Yahoo, Hotmail, AOL)Payment InformationPlease indicate the payment method you would like to use by selecting the appropriate box.Please fax this form to:(646) 607-1907 or (646) 964-6609 - From USA+353-1-481-1716 or +353-1-653-1571 - From Rest of World Pay by credit card:You will receive an email with a link to a secure webpage to enter yourcredit card details.Pay by check:Please post the check, accompanied by this form, to:Research and Markets,Guinness Center,Taylors Lane,Dublin 8,Ireland.Pay by wire transfer:Please transfer funds to:Account number833 130 83Sort code98-53-30Swift codeULSBIE2D IBAN numberIE78ULSB98533083313083Bank Address Ulster Bank,27-35 Main Street,Blackrock,Co. Dublin,Ireland.If you have a Marketing Code please enter it below:Marketing Code:Please note that by ordering from Research and Markets you are agreeing to our Terms and Conditions at /info/terms.asp。