智能车设计原理及电路图
简易电磁循迹智能小车ppt课件

过渡页
Transition Page
总体设计方案
电磁传感器
电
信号采集及处理
源
模
块
逻辑控制
电机驱动
左电机
右电机
电磁传感器
由于赛道路径上铺设的漆包线通有20KHz的方波,传感器采用传统的 电磁感应线圈方案,它具有原理简单,体积较小,价格便宜,相应频率快, 电路实现简单等优点。
检测电磁线圈选用10mH的工字电感,这类电感的体积小, Q值高,具有开放的磁芯等特点。
已知感应电动势的频率为f=20 kHz,感应线圈电感为 L= 10 mH ,可以计算出谐振电容的容量为:
标称电容与上述容值最为接近的电容为 6.8nF,所以在 实际电路中我们选用 6.8nF 的独石电容作为谐振电容。该电 容虽然误差比较大,测试中15个电容里面误差最小的都有 1453pF,但价格便宜。
磁感线是以导体为圆心的一系列同心圆,由上述公式可知,当电 流I一定时,磁感应强度与距离导线中心的长度成反比。变化的磁 场通过感应线圈会产生感应电动势。因此在小车前方放置感应线 圈,根据磁场的大小产生相应感应电动势,驱动小车行进。根据 法拉第电磁感应定律可知,假设线圈半径为r,感应电动势为:
过渡页
过渡页
Transition Page
1
制作过程 2
3
第一阶段:课程设计题目分析、文献查询和 咨询阶段
第二阶段:电路设计、元器件采购及电路板 PCB设计阶段
第三阶段:焊接电路及调试阶段
过渡页
Transition Page
通过在跑道上测试,本设计基本达到了课程设计要求。 但其中也有不足之处。首先小车在行进途中会出现左 右晃动的情况,通过分析,是由于对感应部分的放大 电路没有达到要求,当导线位于两电感线圈中间时, 产生的感应电动势极其微小,放大倍数不高,以至于 后面的逻辑判断不能准确定位。其次对于小车行驶速 度也有待提高,起初为了防止小车因速度过快不能及 时反应而脱离跑道,因此在电机驱动电路上选择稍大 电阻,以减小电流。整体而言,整个设计所需成本较 低,功能也基本完善,在后续的学习和工作中,我将 进一步改进传感器电路,加大探测范围,提升小车速 度,来提升智能车的性能。
智能车设计原理及电路图
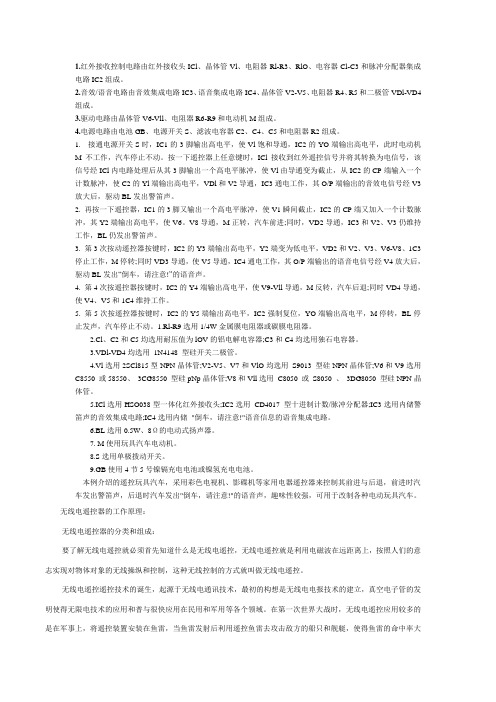
1.红外接收控制电路由红外接收头ICl、晶体管Vl、电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器集成电路IC2组成。
2.音效/语音电路由音效集成电路IC3、语音集成电路IC4、晶体管V2-V5、电阻器R4、R5和二极管VDl-VD4组成。
3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、C4、C5和电阻器R2组成。
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO端输出高电平,此时电动机M不工作,汽车停止不动。
按一下遥控器上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号经ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截止,从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl和V2导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后,驱动BL发出警笛声。
2. 再按一下遥控器,IC1的3脚又输出一个高电平脉冲,使V1瞬间截止,IC2的CP端又加入一个计数脉冲,其Y2端输出高电平,使V6。
V8导通,M正转,汽车前进;同时,VD2导通,IC3和V2、V3仍维持工作,BL仍发出警笛声。
3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平,VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动BL发出“倒车,请注意!”的语音声。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端输出高电平,M停转,BL停止发声,汽车停止不动。
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。
2.Cl、C2和C5均选用耐压值为lOV的铝电解电容器;C3和C4均选用独石电容器。
智能小车循迹报告
智能小车循迹报告电工电子实习报告学院:专业班级:学生姓名: 指导教师:完成时间:成绩:评阅意见:评阅教师日期智能循迹小车设计报告一. 设计要求(1)(通过理论学习掌握基本的焊接知识以及电子产品的生产流程。
(2)(熟悉掌握手工焊接的方法与技巧。
(3)(完成循迹智能小车的安装与调试二. 设计的作用、目的1.利用所学过的基础知识,通过本次电子实习培养独立解决实际问题的能力;2(巩固本课程所学的理论知识和实验技能;3(掌握常用电子电路的一般设计方法,提高设计能力和实验、动手能力,为今后从事电子电路的设计、研制电子产品打下基础。
三.设计的具体实现1. 系统概述智能机器人小车的设计中我们使用的是一体反射式红外对管,所谓一体就是发射管和接受管固定在一起,反射式的工作原理就是接收管接收到的信号是发射管发出的红外光经过反射物的反射后得到的,所以使用红外对管进行循迹时必须是白色地板红外寻迹是利用红外光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
(为简化操作,本次实习只安装了两侧的探头)1)行驶直线的控制:利用红外传感器的左右最外端的探头检测黑线,如果全白则说明在道中间,没有偏离轨道,走直线;一旦右侧探头检测到黑线,说明小车外侧探头已跑出轨道,让车左拐;同理一旦左侧检测到黑线,说明左侧探头已经出线,执行右拐命令。
2)拐直角弯的控制:当车前探头检测到黑线,执行直走,让车中心探头去检测,一旦探头检测到黑线开始左拐,直到车位探头检测到跳出左拐命令,继续开始执行循迹,通过设置车中间探头与车尾探头的间距,便可以实现拐弯的角度,进而顺利入弯。
小车的硬件主要包括4大模块:即电源模块、电机驱动模块、红外循迹模块、简易控制模块。
系统工作框图如下:驱动电机检测黑线简易控制控制小车2.单元电路设计与分析1)电源模块电源模块电路板LM2596 开关电压调节器是降压型电源管理单片集成电路,能够输出 3A 的驱动电流,同时具有很好的线性和负载调节特性。
基于Arduino的智能避障小车设计

科技与创新I Science and Technology & Innovation —文章编号:2095 - 6835 (2021 ) 04 - 0032 - 03{ 2021年第04期]基于Arduino 的智能避障小车设计** [基金项目]新疆农业大学大学生创新项目(编号:dxscx2020299 )曾颖琳,董欣,倪鹏,郭斌(新疆农业大学计算机与信息工程学院,新疆乌鲁木齐830052)摘 要:避障功能是无人驾驶的研究基础。
为了进一步掌握小车的避障功能,利用Arduino 核心控制芯片和超声波避障传感器设计了智能避障小车,通过开发避障算法,实现了智能小车的自动避障功能。
该小车经过通过实验测试,其功能满足避障的基本需求,具有一定的现实意义。
关键词:Arduino ;智能小车;超声波;自动避障 中图分类号:TP23 文献标志码:A1引言目前,人工智能和自动化技术的快速发展引领了许多产 业的飞速进步,越来越多的智能控制产品走进了人们的生 活。
自动驾驶车应用了智能控制、模式识别、计算机、传感器等多种技术[1]。
自动驾驶车的应用不但可以有效地缓解交 通问题,而且可以把人从驾驶过程中解放出来,避免由疲劳 驾驶、酒驾、操作失误等引起的突发意外,从而为人们的生活提供便利,因此,它越来越受到人们的密切关注。
智能避 障小车是自动驾驶车的雏形,也是必备的基础之一,其主要 是解决车在行驶过程中的自动避开障碍物的问题,这一问题的解决也是辅助车自动驾驶的必要条件之一,所以对其进行 研究和探讨具有一定的意义。
目前,各院校都有过对智能避障小车研究的报道,且获得了一定的应用。
作为自动驾驶的重要基础,利用所学的知识实现智能避障小车不但为以后的 开发积累必要的经验,也是进一步研究的必经之路。
本文是 以Arduino 开发板作为核心控制器,结合超声波传感器、电 机、舵机等硬件设计和程序调用,实现避障功能以达到小车的自动行驶。
自动循迹智能小车设计报告

一、设计目标通过设计进一步掌握51单片机的应用,特别是在控制系统中的应用。
进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。
二、总体方案设计该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车姿态的控制,绕跑到行驶一周。
三、软硬件设计硬件电路的设计1、最小系统:小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。
主要包括:时钟电路、电源电路、复位电路。
其中各个部分的功能如下:(1)、电源电路:给单片机提供5V电源。
(2)、复位电路:在电压达到正常值时给单片机一个复位信号。
图1 单片机最小系统原理图2、电源电路设计:模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。
在本设计中,51单片机使用5V电源,电机及舵机使用5V电源。
考虑到电源为电池组,额定电压为4.5V,实际充满电后电压则为4-4.5V,所以单片机及传感器模块采用最小系统模块稳压后的5V电源供电,舵机及电机直接由电池供电。
3、传感器电路:光电寻线方案一般由多对红外收发管组成,通过检测接收到的反射光强,判断黑白线。
原理图由红外对管和电压比较器两部分组成,红外对管输出的模拟电压通过电压比较器转换成数字电平输出到单片机。
图2 赛道检测原理图:4、电机驱动电路:电机驱动芯片L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
其引脚排列如图1中U4所示,1脚和15脚可单独引出连接电流采样电阻器,形成电流传感信号。
L298可驱动2个电机,OUT1、OUT2和OUT3、OUT4之间分别接2个电动机。
智能小车方案
智能小车寻迹与避障方案总体方案:整个电路系统分为寻迹检测、避障检测、控制、驱动四个模块。
首先利用检测模块对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
检测模块:在该模块中包括有速度信息检测和位置信息检测两个子模块,分别检测小车当前的位置信息和速度信息,并将检测到的信息传给MCU,其核心是传感器。
控制模块:控制模块包括信息处理和控制,其核心是MCU,MCU接收到检测来的信号,对信号进行处理后作出判断,并发出控制命令。
驱动模块:该模块包括了驱动电机,当接收到MCU的命令后便执行相应的操作,同时检测模块又检测到电机的状态信息,反馈给MCU 。
从而整个系统构成一个闭环系统,在运行过程中,系统自动调节而达到正确行驶的目的。
智能小车寻迹与避障系统框图一.方案论证与选择1.1小车方案方案一:三轮智能小车。
三轮智能小车的结构简单,易于操作,前轮的方向由舵机控制。
但该方案的缺点也十分明显,在小车在行驶过程中的稳定性不足,并且行驶速度过慢。
方案二:四轮智能小车。
四轮智能小车相对于三轮智能小车在结构上更为复杂,但其稳定性得到明显加强。
两个电机分别控制小车的两个后轮,驱动小车前进。
同时四轮小车在转弯的控制性上更好。
综合以上信息,在本次试验中,四轮驱动小车的性能更为优越,也更符合设计的目的和要求。
所以此次智能小车方案选择四轮小车作为小车模型。
1.2电源管理模块方案一:三端固定输出电压式稳压电源L7805:运用其器件内部电路来实现过压保护、过流保护、过热保护,这使它的性能很稳定。
能够实现1A以上的输出电流器件具有良好的温度系数。
L7805有多种电压输出值5V~24V,因此它的应用范围很广泛,可以运用本地调节来消除噪声影响,解决了与单点调节相关的分散问题,输出电压误差精度分为±3%和±5%。
而且它的价格低廉。
方案二:LM1117是一个低压差电压调节器系列。
智能小车控制系统设计实现

关键词:智能小车;控制系统;设计和实现1智能小车控制系统概述智能小车控制系统是一个综合、复杂的系统,其既有多种技术,也含有嵌入式的软件设备和硬件设备、图像识别、自动控制和电力传动、机械结构等技术知识,智能小车的控制系统主要是围绕嵌入式控制系统进行的,将其作为操控的中心,并借助计算机系统,最终完成自动造作和控制的过程[1]。
智能小车的控制系统流程图见图1所示。
2智能小车的设计和实现2.1智能小车的硬件设计硬件设计是保证智能小车平稳运行的必要条件,它关系着控制系统的精度和稳定性,因此在设计时需要用在模块化设计思想,该研究是通过采取硬件系统K60芯片作为核心控制器,并通过图像采集模块和电机、舵机驱动模块、测速模块、电源模块等组成硬件设计系统图,见图2。
首先,电源电路设计,该设计时智能小车的动力来源,为小车运行提供不断的电力,一般采取7.3V、容量为2000mAh的可充电型的镍铬电池作为电源,但是其不能直接为控制器传输电力,需要在转变电路后才可以进行传输。
转变电路可以保证控制器直接对电池内的电压进行调节,保证不同模块可以正常工作和运行,智能小车主要是依靠控制电力和电机驱动进行转变的。
其次是K60最小系统板,在设计时需要将K60的管脚部分做成最小系统的单独电路板,这样可以简化电路板的设计,促使调试更加顺利,K60系统板主要由K60芯片、复位电路、时钟电路、JTAG下载电路、电源滤波电路组成。
再其次是电机驱动电路,该电路是在集成芯片的驱动下进行的,可以为控制器更其他模块提供较大的电流最终集成电机驱动芯片,但是要特别注意这部分因为在电机驱动过程中有较大的分功率,会导致小车在进行调试时因为过大的电流导致小车电路发生堵塞现象,而使小车电路被烧毁,因此需要设计者避免这种现象,可以将驱动电路做成驱动板[2]。
最后是舵机接口电路。
在智能小车设计中,舵机主要保证小车可以顺利转向,因此舵机的运行电压、转向动作、转向速度都是需要考虑的因素,一般选择舵机时主要选择Futaba3010,选择供电电压为6V。
智能小车系统设计与制作

智能小车系统设计与制作摘要:智能小车采用STM32F103RBT6为主芯片,电机驱动采用高压、大电流双全式驱动器L298芯片,八路循迹反射式光电TCRT5000进行循迹,通过LM358比较电路比较,再进行波形整形,通过触摸屏上的按钮来任意的控制智能小车的方向,用DSl8B20温度传感器采集小车所处环境的温度,小车与上位机之间的通讯采用NRF24L01通讯,电源部分则用双电源供电,运行更可靠。
小车可按照预先设定好的轨道进行循迹,遇到障碍物自行躲避,达到无线遥控、自动循迹的功能。
关键词:STM32F103RBT6;循迹;NRF24L01无线通信;DS18B20温度传感器; 触摸屏智能作为现代社会的新产物,是以后的发展方向,它可以按照预先设定的模式在一定的运行环境中自行的运作,无需人为的操作,便可以完成预期达到的或更高的要求。
随着人们物质生活水平的提高,汽车也越来越普及,而交通事故也相应的增加,在人身财产、生命安全方面造成了一定的负面影响。
目前,智能车领域的研究已经能够在具有一定标记的道路上为司机提供辅助驾驶系统甚至实现无人驾驶,这些智能车的设计通常依靠特定的道路标记完成识别,通过推理判断模仿人工驾驶进行操作,大大降低了事故的发生率。
碰到障碍物,小车会自动的躲避障碍物,就不会有那么多得交通事故。
智能小车是机器人的一个分支,现如今机器人已经不是人类它体现了人类长期以来的一种愿望。
目前已在工业领域得到广泛的应用,而且正以惊人的速度不断向军事、医疗、服务、娱乐等非工业领域扩展。
智能小车的设计结合了最基本的计算机控制技术、单片机技术、传感器技术、智能控制技术、机电一体化技术、无线通信技术及机器人技术,能有效的把大学所学知识进行综合应用。
一、系统总体设计本课题要求:设计一款小车,它具备按规定轨迹自主寻迹运行能力、接收无线遥控信号命令并进行遥控运行的能力、躲避障碍物的能力、能够采集环境的温度或湿度数据并发送至主机的功能。
智能车ppt

方案设计
传感器设计方案: 安装摄像头时,要考虑的因素很多,主要有以下几 点: 1. 确保摄像头位置的居中,因为当摄像头不居中时, 其采集进来的图像也不是居中的,而处理程序对舵机 输出量是居中的,这样就会导致模型车在直道上也会 存在左右摆动的问题。 2. 摄像头的高度要足够高,这样可以使得模型车在摄 像头的角度不是很高的情况下就能够前瞻到前方足够 远处的路况信息,因为当摄像头的角度过大时候,
名 次
1 2 3
学校名称
湖南大学
比赛成 绩
30.299
北京科技大 30.311 学 山东大学 30.405
摄像头组决赛成绩
名次 1 2 3 4 5 6 7 8 学校名称 湖南大学 北京科技大学 山东大学 杭州电子科技大 学信息工程学院 西北工业大学 队伍名称 睿思队 北京科技大学摄 像头一队 白杨队 杭电信工5队 翱翔队 钱江5号 Drift 雏鹰队 比赛成绩 30.299 30.311 30.405 30.818 30.894 31.692 31.694 31.99
杭州电子科技大 学 华东理工大学
河海大学常州校 区
摄像头
在调查资料后,发现摄像头组的智能车在处理采集的 信号后再转换为单片机所需的信号所用的时间需要 20ms,而电磁和光电组的处理信号在10~20us之间, 我们组觉得这个可以是个突破点。 由于制作摄像头组的智能车需要有关于图像处理方面 的知识,而我们组的组员都是通信工程专业的学生, 今后发展可能会和图像处理,视频方面是工作挂钩。 去年我们学校代表队在摄像头组方面取的成绩相比于 其他组较好,所以我们能利用到更好的前辈资源。 我们发现摄像头组在采集信号,处理信号比其他组的 较为麻烦,所以觉得这是突破点。
智能小车设计 PPT
2、1 智能小车硬件设计
2、电机及驱动模块的选择方案
方案一:选择普通直流电机。 直流电机能够通过减速齿轮 增大扭力,提高带负载能力。直流 电机的优点是:价格廉价,驱动控 制容易,但不能做到精确控制是其 一大弱点。
2、1 智能小车硬件设计
方案二:选择步进电机。 步进电机的特点是:能够精确控 制电机选择步数与角度,能良好的达 到题目要求的精确度。 考虑到题目性能要求,我们选择 了步进电机,同时采纳电机驱动芯片 BA6845FS。BA6845FS包罗两个独立 的H桥电路。直截了当给芯片上电, 即可实现电机的驱动。此芯片集成 度高,电路简单,控制方便可靠,体积 小,效率高。
智能小车设计
主要报告内容
一、题目要求及设计思路简介 二、智能小车系统设计 三、系统关键问题分析及解决方案 四、系统实现及测试 五、指导教师点评
主要报告内容
一、题目要求及设计思路简介 二、智能小车系统设计 三、系统关键问题分析及解决方案 四、系统实现及测试 五、指导教师点评
1、1 题目要求简介
题目要求两辆小车在如右图所示的赛道上 实现如下功能: 1、 基本要求
1、2 设计思路介绍
智能小车功能需求
精准寻迹 快速行进 位置同步 自主超车
完成功能需求 所需的模块
光电检测模块
电机及驱动模块 无线通讯模块
主处理模块 供电系统模块
解决方案
红外传感器 +
步进电机 +
ARM控制板 +
无线收发
主要报告内容
一、题目要求及设计思路简介 二、智能小车系统设计 三、系统关键问题分析及解决方案 四、系统实现及测试 五、指导教师点评
2、1 智能小车硬件设计
3、位置同步方案
智能小车控制系统的设计分析

摘要随着自动控制技术的迅速发展,自动化技术已广泛应用于国计民生的各行各业。
智能汽车就是自动化技术发展的重要成果之一。
本文介绍了智能小车的研究设计背景与现状及其各个工作模块的工作原理、硬件及软件设计。
本设计中的自动循迹模块采用光电传感器循迹方法,选用RPR220型红外一体式发射接收管作为光电传感器,通过三组光电传感器识别小车的运行姿态。
避障模块利用超声波测距传感器,超声波发射部分的换能器选用TCT40-16T,接收部分选用TCT40-16R,在小车的左前右分别安装一组测距传感器实现避障功能。
设计遥控模块对小车进行启停及加减速控制,通过光电编码实现对小车的测速功能。
设计显示模块从而实时了解小车的运行状态。
选用包含H桥的L298N模块,利用PWM驱动小车行驶。
关键字:循迹,避障,遥控,显示,测速,PWM驱动ABSTRACTWith the rapid development of automatic control technology, automation technology has been widely used in various industries of the national economy and the people’s livelihood. Smart car is one of the important results of the development of automation technology. This article describes the design background and current situation of the intelligent car and the working principle, hardware and software design of the car’s modules.The automatic tracking of this design uses photoelectric sensor tracking method, and we choose RPR220 as the photoelectric sensor, which integrate the infrared transmitting and receiving tubes, three sets of photoelectric sensor distinguish the car’s running posture. Obstacle avoidance module utilizes ultrasonic distance sensor. We choose TCT40-16T as the emitting portion of the ultrasonic transducer and TCT40-16R as the receiving portion. Three distance measuring sensors are respectively fixed on the front, left and right of the car to achieve the obstacle avoidance function. Design remote control to control the start,stop,acceleration and deceleration of the car, and we utilize the optical-electricity encoder to realize the car’s speed measuring function. Design the display module to know the real-time of the car. Choose the L298N module which contains the H-bridge and utilize the PWM to drive the intelligent car running.KEYWORDS:tracking, obstacle avoidance, remote control, display, speed measurement, PWM driving目录摘要(中文) (1)摘要(外文) (2)1 绪论 (1)1.1 设计背景与意义 (1)1.2 当前国内外的研究设计现状及成果 (2)1.2.1 国外研究现状及成果 (2)1.2.2 我国研究现状及成果 (3)1.3 本设计的内容及结构 (4)1.3.1 设计内容 (4)1.3.2 本文结构 (5)2 智能小车控制系统的设计原理 (7)2.1、智能小车自动循迹原理 (7)2.1.1 小车循迹原理 (7)2.1.2 光电传感器工作原理 (8)2.1.3 光电传感器的常用类型 (9)2.2 超声波测距避障原理 (9)2.3 智能小车测速原理 (12)2.3.1直流电机测速 (12)2.3.2 光电码盘测速 (14)2.4 智能小车遥控原理 (15)2.4.1 红外遥控的实现模块 (15)2.4.2 红外遥控的工作原理 (15)2.5 智能小车的电机驱动电路工作原理 (16)3 智能小车控制系统的硬件电路图设计 (17)3.1 智能小车的电源模块设计 (17)3.2 智能小车自动循迹的硬件电路设计 (18)3.2.1 循迹传感器选择 (18)3.2.2 循迹电路图设计 (19)3.3 智能小车超声波测距的硬件电路设计 (20)3.3.1 超声波发射部分的硬件电路设计 (20)3.3.2 超声波接收部分的硬件电路设计 (20)3.4 智能小车数码显示的硬件电路设计 (21)3.4.1 LED数码显示器的结构与显示段码 (21)3.4.2 LED数码显示器的显示方法 (23)3.4.3 数码显示的硬件设计 (23)3.5 智能小车遥控的硬件电路设计 (24)3.5.1 智能小车的遥控发射模块硬件设计 (24)3.5.2 智能小车的遥控接收模块硬件设计 (25)3.6 智能小车电机驱动的硬件电路设计 (26)3.6.1 智能小车的电机驱动芯片选择 (26)3.6.2 智能小车的电机驱动电路的设计 (27)3.7 智能小车整体的硬件电路设计 (27)4 智能小车控制系统的软件设计 (29)4.1 主程序设计 (29)4.2 自动循迹模块程序设计 (30)4.3 测距避障模块程序设计 (2)4.4 数码显示模块程序设计 (3)4.5 编码测速模块程序设计 (4)4.6 红外遥控模块程序设计 (5)总结............................................... 错误!未定义书签。
智能循迹小车设计方案 智能循迹小车方案

智能循迹小车设计方案智能循迹小车方案自动化06--2班2009年6月5日自动寻迹小车摘要本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。
系统由AT89S51通过IO口控制小车的前进后退以及转向。
寻迹由RPR2…各省主要风电塔架制造厂名单序号123456789101112131415161718192021222324 公司名称甘肃玉门锦辉长城甘肃科耀电力有限公司北车集团兰州金牛轨道交通装备有限公司河北强盛风电设备有限公司保定天威电气设备结构有限公司…学习“七.一”讲话精神,深入剖析“四种危险” 胡锦涛在党庆90年大会上,总结了建党以来的“三件大事”和“两大成果”,提出了往后“两个宏伟目标”,指出中共面临“四种考验”和存在“四种危险”。
整篇讲话与时俱进,有新意,有不少新提法,是一篇回顾历史、总结经…自动化06--2班2009年6月5日自动寻迹小车摘要本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。
系统由AT89S51通过IO口控制小车的前进后退以及转向。
寻迹由RPR220型光电对管完成。
关键词:AT89S51 直流电机光电传感器自动寻迹电动车AbstractThe smart car is aluminum alloy for the chassis, AT89S51 MCU as its core, including motor and servo, plus photoelectric sensors, as well as other flame sensor and power circuit. MCU controls the car turning back forward or running on the white line. RPR220 reflective photo sensor seeks the trace. Far infrared flame sensor tracks the flame. In addition, the SCM system with Sunplus for voice broadcast can remind current status. The system transmits information through DF module. The car’s status will be transmitted to the Remote Console. OCMJ4X8C LCDdisplay and 2 keys for start control.Keywords: AT89S51 Motor Servo Photo sensor Electrical fire engines一、系统设计1、设计要求(1)寻线跑(2)显示小车当前的速度(3)显示时间并记录行驶距离(4)自动避开障碍物(5)其他2、小车循迹的原理这里的循迹是指小车在地板白纸上循黑线行走,通常采取的方法是红外探测法。
智能小车课件

深度学习在智能小车中的应用
图像识别与处理
通过深度学习技术,如卷积神经网络 (CNN),实现智能小车对道路标志 、交通信号等图像信息的识别和处理 。
语音识别与交互
自动驾驶
结合深度学习技术,实现智能小车的 自动驾驶功能,包括环境感知、路径 规划、行为决策等。
3
场景理解与建模
结合计算机视觉技术,对道路场景进行理解和建 模,为智能小车的路径规划和行为决策提供有力 支持。
06
CATALOGUE
智能小车设计与制作实践
硬件平台搭建与选型建议
常见硬件平台介绍
01
Arduino、Raspberry Pi、STM32等;
选型建议
02
根据项目需求和预算,选择合适的硬件平台;
智能小车通常由感知系统、控制系统 、驱动系统和电源系统等组成。
工作原理
感知系统负责采集周围环境信息,控 制系统根据采集的信息进行决策和规 划,驱动系统执行控制指令,实现小 车的自主导航、避障、定位等功能。
02
CATALOGUE
传感器技术
传感器类型及作用
01
02
03
04
温度传感器
检测环境温度,用于控制小车 的加热或冷却系统。
A*算法
一种启发式搜索算法,通过引入启发式函数来指导搜索方 向,提高搜索效率。适用于存在障碍物和动态环境的路径 规划问题。
动态规划算法
一种用于解决多阶段决策问题的算法,通过将问题分解为 多个子问题并求解,得到全局最优解。适用于复杂环境下 的路径规划问题。
定位技术原理及应用
01
GPS定位
智能避障小车设计

江阴职业技术学院项目设计报告项目:超声波避障小车的设计与制作专业应用电子技术专业学生姓名班级10应用电子()班学号指导教师完成日期智能小车是一种能够通过编程手段完成特定任务的小型化机器人,它具有制作成本低廉,电路结构简单,程序调试方便等优点。
由于具有很强的趣味性,智能小车深受广大机器人爱好者以及高校学生的喜爱。
本论文介绍的是具有自动避障功能的智能小车的设计与制作(以下简称智能小车),论文对智能小车的方案选择,设计思路,以及软硬件的功能和工作原理进行了详细的分析和论述。
经实践验收测试,该智能小车的电路结构简单,调试方便,系统反映快速、灵活,设计方案正确、可行,各项指标稳定、可靠。
Smart cars can be programmed to perform a specific task means the miniaturization of robot, it has to make cost is low, circuit simple structure, convenient program test. Because of it has strong interest, intelligent robot car favored by the majority of the university students' enthusiasts and love.This paper introduces the is a automatic obstacle avoidance function of intelligent car design and production (hereinafter referred to as the smart car), the thesis to the intelligence of the car scheme selection, design idea, and the implementation of hardware and software function and working principle of a detailed analysis and discusses. After practice acceptance test, this intelligent car circuit structure is simple, convenient debug, fast, flexible system reflect, correct and feasible design scheme, each index is steady and reliable.第一章绪论1.1项目研究背景及意义:智能作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
简易智能电动车控制系统设计方案

简易智能电动车控制系统设计摘要AT89S52单片机是一款八位单片机,它的易用性和多功能性受到了广大使用者的好评。
现在,单片机已广泛地应用在智能仪器仪表、机电设备过程控制、自动检测、家用电器和数据处理等各个方面。
随着单片机的发展以及它在各种复杂的控制系统、智能化系统中的广泛应用,它将渗透到生产和生活的各个领域。
本设计的理论设计方案、调试方法、测试数据分析方法及设计中的特色与创新.点等对自动运输机器人、家用清洁机器人、灭火机器人等自主及半自主机器人的设计与实现有一定的参考意义。
本文介绍了基于AT89S52单片机,利用红外传感器检测道路上的障碍,控制电动小车的自动避障,用PMW调速方式控制车子快慢速行驶,以及自动停车,并可以自动记录和显示时间、里程和速度,自动寻迹、检测铁片、发出声光信息和寻光功能。
整个系统的电路逻辑结构简单,可靠性能高,实现功能强大。
本文着重介绍了该系统的组成、硬件配置、软件设计、工作原理、功能以及技术性能。
本设计的特色就在于它利用AT89S52作为中心芯片对外部进行控制,在外部信号采集后经LM324电压比较器后能够给单片机输入稳定的高低电平,在小车行驶动力采用L293芯片具有足够的驱动力,选LCD1602做为显示器增加了本设计的显示功能,改变了传统的LED显示信息量小的局限性。
关键词:AT89S52单片机电动小车 PMW调速红外传感器自动避障 LM324 L293 LCD1602目录1 前言 (1)1.1 本论文的主要工作 (1)1.2 预期目标 (2)2 系统设计可行性分析 (2)2.1 总体方案 (2)2.2 电源模块方案 (2)2.3 智能车驱动方案 (3)2.4 直流调速方案 (3)2.5 检测放大器方案 (4)2.6 检测黑线方案 (6)2.7 检测铁片方案 (6)2.8 避障方案 (6)2.9 寻光方案 (6)2.10 停车方案 (7)2.11 行车距离检测方案 (7)2.12 声音提示方案 (8)2.13 显示部分 (8)2.14 系统工作原理 (8)2.15 本章小结 (9)3 系统硬件电路 (9)3.1 电源电路 (9)3.2 驱动电路 (10)3.3 检测电路 (11)3.3.1 黑线检测 (11)3.3.2 铁片检测 (11)3.3.3 障碍物检测 (12)3.4 单片机最小电路 (12)3.5 声光电路 (13)3.6 显示电路 (13)3.7 系统总电路图 (16)3.7 本章小结 (17)4 系统软件电路 (17)4.1 系统软件设计说明 (17)4.2 软件流程图 (17)4.3 本章小结 (29)5 硬件电路的制作与调试 (30)5.1 电路板的制作 (30)5.1.1 电路图的绘制 (30)5.1.2 制作电路板 (30)5.2 电路板的焊接 (31)5.2.1 手工焊锡要点 (31)5.2.2 焊锡操作要领 (31)5.3 电路的调试 (31)5.3.1 测试方法与仪器 (31)5.3.2 电源模块调试 (32)5.3.3 单片机模块调试 (32)5.3.4 检测模块调试 (32)5.4 本章小结 (34)6 结论 (34)致谢 (35)参考文献 (36)英文摘要 (37)附录成绩评定表1 前言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.红外接收控制电路由红外接收头ICl、晶体管Vl、电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器集成电路IC2组成。
2.音效/语音电路由音效集成电路IC3、语音集成电路IC4、晶体管V2-V5、电阻器R4、R5和二极管VDl-VD4组成。
3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、C4、C5和电阻器R2组成。
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO端输出高电平,此时电动机M不工作,汽车停止不动。
按一下遥控器上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号经ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截止,从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl和V2导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后,驱动BL发出警笛声。
2. 再按一下遥控器,IC1的3脚又输出一个高电平脉冲,使V1瞬间截止,IC2的CP端又加入一个计数脉冲,其Y2端输出高电平,使V6。
V8导通,M正转,汽车前进;同时,VD2导通,IC3和V2、V3仍维持工作,BL仍发出警笛声。
3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平,VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动BL发出“倒车,请注意!”的语音声。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端输出高电平,M停转,BL停止发声,汽车停止不动。
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。
2.Cl、C2和C5均选用耐压值为lOV的铝电解电容器;C3和C4均选用独石电容器。
3.VDl-VD4均选用1N4148 型硅开关二极管。
4.Vl选用2SCl815型NPN晶体管;V2-V5、V7和VlO均选用S9013 型硅NPN晶体管;V6和V9选用C8550 或58550、3CG8550 型硅pNp晶体管;V8和Vll选用C8050 或S8050 、3DG8050 型硅NPN晶体管。
5.ICl选用HSO038型一体化红外接收头;IC2选用CD4017 型十进制计数/脉冲分配器;IC3选用内储警笛声的音效集成电路;IC4选用内储"倒车,请注意!"语音信息的语音集成电路。
6.BL选用0.5W、8Ω的电动式扬声器。
7. M使用玩具汽车电动机。
8.S选用单极拨动开关。
9.GB使用4节5号镍镉充电电池或镍氢充电电池。
本例介绍的遥控玩具汽车,采用彩色电视机、影碟机等家用电器遥控器来控制其前进与后退,前进时汽车发出警笛声,后退时汽车发出"倒车,请注意!"的语音声,趣味性较强,可用于改制各种电动玩具汽车。
无线电遥控器的工作原理:无线电遥控器的分类和组成:要了解无线电遥控就必须首先知道什么是无线电遥控,无线电遥控就是利用电磁波在远距离上,按照人们的意志实现对物体对象的无线操纵和控制,这种无线控制的方式就叫做无线电遥控。
无线电遥控遥控技术的诞生,起源于无线电通讯技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无限电技术的应用和普及很快应用在民用和军用等各个领域。
在第一次世界大战时,无线电遥控应用较多的是在军事上,将遥控装置安装在鱼雷,当鱼雷发射后利用遥控鱼雷去攻击敌方的船只和舰艇,使得鱼雷的命中率大大的提高。
到了第二次世界大战时,纳粹德国又将无线电遥控系统安装在V——2火箭上,对英国伦敦进行了大规模的轰炸,在那时可以说无线电遥控技术发挥到了极至。
后来随着晶体管的发明和集成电路的诞生,无线电遥控技术达到了更加完善的程度,现如今我们所知道导弹、卫星、航天飞机等高科技技术都是利用无线电遥控技术的结晶,它已经不再是军事领域唯一成员,我们的日常生活可以说是已经离不了无线电遥控,如:遥控监视、报警、遥控电视、遥控玩具等等。
那么,无线电遥控是怎样划分的呢?又是怎样工作的呢?下面我们就来谈谈这个问题。
从无线电遥控的定义上看,所有能够实现无线遥控的控制系统,都应视为无线电遥控装置,为此我们按其发射和接收波谱频率上分,有音频声控、可见光控、红外线控、射频电磁波控和载频电磁波控等;按发射和接收的传输方式上分,有再生式、超再式、外差式、超外差式、等幅、调幅式和调频式等等;如果按发射和接收的载体性质上分,有单音频式遥控、双单音频式遥控、脉冲数字式遥控等等;如果我们按发射和接收的动作类型上分,有开关式、占空比式、脉宽式、脉位式、复合式、时分比例式和混合比例式等等;如果按发射和接收的通道数量上分,有单通道、双通道、四通道、八通道和十通道以上的多通道等等;如果再按发射和接收频率波长上分,有长波、中波、短波或低频、高频和甚高频等等;从发射和接收的电路组成上看,有分立元件、集成电路、模拟电路、数字电路、混合电路等等。
可以说从广义上看无线电遥控技术的种类和方式多种多样,我们不能一一的详尽。
为了能使大家对无线电遥控有更加深刻的了解,我们先介绍一下模型用无线电遥控设备和电路的组成。
无线电遥控模型的设备一般都包括以下几个部分遥控发射机、遥控接收机、执行舵机、电子调速器组成。
1.遥控发射机就是我们所说的遥控器,它是来操控我们的车模或船模的,由于它外部有一个长长的天线,遥控指令都是通过机壳外部的控制开关和按钮,经过内部电路的调制、编码,再通过高频信号放大电路由天线将电磁波发射出去。
目前模型常用的遥控发射机有三种类型:一种是盒式按键手持用的小型遥控发射机;一种是便携杆式遥控发射机;另一种是手持枪式遥控发射机。
前一种多为开关式模拟电路的遥控系统,为一般普通的玩具遥控车模、船模或航模使用,电路的设计和制作比较简单,动作的指令都为“开”和“关”两种,虽然通道的数量可以很多,遥控的性能和距离较低。
而发射机为杆式和枪式两种通常为比例式的无线电遥控器,在动态仿真模型中是当今最为流行的遥控操作系统,由于这两种在调制、编码和电路的组成等方式的不同,其性价比有很大的差异,所以在价格上也不同。
比例遥控杆式发射机有两个操纵杆,左边的杆用来控制模型车的速度及刹车(前进或后退),右边的杆控制模型车的方向。
枪式发射机用一个转轮(方向盘)和一个类似手枪扳机的操纵杆来分别控制方向和速度。
除了这些基本功能之外,一些较高级发射机还运用了先进的电脑技术,增加了许多附加的功能,如储存多种模型车、船的调整数据,一机多用;有计时、计圈功能,方便练习和比赛;有大型液晶显示屏幕,可显示工作状态和各种功能。
这两种遥控发射机的基本原理大体上是相同的,只是遥控发射机的外形和操控方式不同罢了,也许有要人问:那种类型的好?其实关键是你自己的习惯,喜欢那种操控方式,一旦你选好了类型,最好不要在中途随便更换发射机的类型,这样会改变你的操控习惯。
2.遥控接收机遥控接收机是安装在车模或船模上用来接收无线电信号的。
它会处理来自遥控发射机的无线电信号,将所接收的信号进行放大、整形、解码,并把接收来的控制信号转换成执行电路可以识别的音频信号或是数字脉冲信号,传输给车模上或船模上的其他电子部件,如:舵机电路、电子调速器电路等执行机构,这样一来我们的车模或船模,就会通过这些执行机构来完成我们所发出的动作指令。
由于接收机是装在模型飞机上、车上或船上的,一般都尽量做得很小巧,有两个火柴合大小,重量仅几十克,但大都为具有很高的灵敏度,性能低一些的接收距离也有几百米,而好的却能接收千米外发射来的无线电信号。
接收机一般都要与发射机配套使用,通常使用专用的电池组或使用六伏直流电源(4节5号电池)。
3.伺服舵机舵机是把从接收机传来的信号转换为机械的动作的一种机电一体的装置,主要作用是把接收机收到的电信号转换成相应的机械动作,借此完成方向和速度的控制。
伺服舵机根据不同用途又可分为普通舵机、强力舵机和微型舵机。
普通舵机能满足一般使用要求;强力舵机通常被用在较大的模型或受力较大的控制机构上(如越野车的转向机构);微型舵机则常被用于尺寸和受力都比较小的模型车模或船模上。
但有的舵机也常分离成单独的个体,这种机电分离的形式常用在非比例执行的控制电路当中,早年我们常把它称作随动器或擒纵器,实际就是一个齿轮减速装置,现在的一些开关型的遥控系统常采用它。
比例舵机则与往常大不一样,不仅体积小而且精密,是现在比例遥控系统常用的动作执行机械。
4.电子调速器电子调速器就是我们通常所说的电调,是专门用在电动遥控模型上的动力输出控制装置,它是控制车模或船模上的电动机的转速和正转反转的一种电子控制电路。
也可以说电子调速器是接收来自接收机控制信号的一种放大装置,它将所接收到的比例信号放大成电动机可直接使用的电压和电流供电动机工作。
它与普通的机械式调速器相比,有体积小、寿命长、效率高、输出功率大的优点。
一些高级的电子变速器还运用了数码技术,采用高频操作,有多种程式刹车、温控自动保护以及自动断电等功能。
无线电遥控器的工作原理:前面我们介绍了模型无线电遥控器的组成,下面我们再介绍一下模型无线电遥控器的工作原理和控制原理,本文以一般的动态模型用四通道比例遥控设备系统为例,介绍一下它的发射机、接收机、舵机、电子调速器等部分的工作原理。
无线电遥控器的外形如图l所示:它是四通道比例遥控发射机设备,外部开关和各部分名称则分别为:在发射机机壳的面板上分别有两个控制l、2通道和3、4通道动作指令的操纵杆,又称遥控杆。
对应X轴与Y轴方向的两个操纵杆的两边分别相对应的是4个通道的微调装置,可分别对1、2通道和3、4的控制动作进行细致的微调。
在发射机后面的电池盖下,一共设置有6个舵机或电子调速器的换向开关,分别用于变换舵机摇臂的偏转方向。
在左下角则是可插拔的石英晶体振荡器,用于变换遥控器的工作频率。
图2所示的是接收机和舵机、电子调速器,以及接收机电源装置所组成的接收控制系统,其中接收机是用来接收从发射机传来的指令信号,经过放大、解码等处理后,指挥舵机和电子调速器作出与发射机指令相对应的动作。
接收机电池是专门给接收机和舵机供电的,由4节普通5号干电池或镍氢电池串联而成。
动力电池组则是给电子调速器提供工作能源,它一般采用较大容量的电池或蓄电池组成。
所谓比例控制,简单说来就是当我们把发射机上的操纵杆由中立位置向某一方向偏移一角度时,与该动作相对应的舵机摇臂也同时偏移相应的角度,舵机摇臂偏转角度与发射机操纵杆偏移角度成比例,如图3显示了发射机执行舵机与船模舵面的动作关系。