机械原理课程设计matlab程序及成果图
基于matlab的GUI设计——机械原理教学演示系统
机械原理教学演示系统——基于matlab的GUI设计xxx指导老师:20年月日目录一、功能简介 (3)二、总界面 (3)三、凸轮模块 (4)四、齿轮模块 (6)五.参考书目 (6)六.附录(部分程序源代码) (7)一、功能简介本系统能实现机械原理教学过程中凸轮模块与齿轮模块的设计与运动仿真,加深对机械原理课程学习的理解。
二、总界面总界面标题设置:set(gcf,'name','机械原理教学演示系统 made by 翟鲁鑫');背景图片设置:ximg=imread('机械原理课本.jpg');imshow(ximg);背景声音播放:Fs=44100;[ywav,Fs]=wavread('夜的钢琴曲 - 六3.wav');sound(ywav,Fs);到各个模块:到凸轮模块clcclose(gcf);clear allGUItulun到齿轮模块clcclose(gcf);clear allGUIchilun关闭系统:clcquestion='真的要退出吗?';title='确认退出?';button=questdlg(question,title,'是','否','是'); switch buttoncase'是'clear allclosecase'否'returnend三、凸轮模块设计要点:1.背景声音设置方法同主界面2.推程角、远休角、回程角之和不能大于360度的判别条件;基圆半径、滚子半径、行程不能为0的判别条件sr0=get(handles.edit2,'string');r0=str2num(sr0);if isequal(r0,0)errordlg('基圆半径不能为0,请重新输入','出错');returnendsrr=get(handles.edit3,'string');rr=str2num(srr);if isequal(rr,0)errordlg('滚子半径不能为0,请重新输入','出错');returnendsh=get(handles.edit4,'string');h=str2num(sh);if isequal(h,0)errordlg('行程不能为0,请重新输入','出错');returnendn3=phi01+phi02+phi03; %推程角、远休止角与回程角的总和if n3>360errordlg('角度之和大于360,请重新输入','出错');end3.仿真程序。
matlab平面连杆结构分析(机械原理课程设计)

优化参数:连杆 长度、角度、质 量等
优化结果:得到 最优的连杆结构 设计
感谢观看
汇报人:
平面连杆结构的应用范围
机械工程:用于设计、分析和优化机械设 备
生物医学:用于设计、分析和优化假肢、 康复设备等
航空航天:用于设计、分析和优化飞机、 火箭等航天器
机器人技术:用于设计、分析和优化机器 人关节、机械臂等
汽车工业:用于设计、分析和优化汽车底 盘、悬挂系统等
建筑工程:用于设计、分析和优化建筑结 构、桥梁等
03
平面连杆结构的运动学分析
平面连杆结构的运动学方程
平面连杆结构的运动学方程是描述连杆系统运动状态的数学模型 运动学方程包括位移方程、速度方程和加速度方程 运动学方程的建立需要知道连杆系统的几何参数和运动参数 运动学方程的求解可以通过数值积分方法或解析方法进行
平面连杆结构的运动学特性
运动学方程:描述连杆结构的运动状态 运动学参数:包括位移、速度、加速度等 运动学约束:限制连杆结构的运动范围 运动学仿真:通过计算机模拟连杆结构的运动过程
平面连杆结构的形状优化
优化目标:提 高连杆结构的 稳定性和刚度
优化方法:有 限元分析、拓
扑优化等
优化参数:连 杆的长度、宽
度、厚度等
优化效果:提 高连杆结构的 承载能力和使
用寿命
平面连杆结构的拓扑优化
拓扑优化:通过改变材料的分布和形状, 约束条件:结构的刚度、强度、稳定
以实现最优的结构性能
性等性能要求
目标函数:最小化重量或体积,同时 满足给定的性能要求
优化方法:遗传算法、粒子群算法、 模拟退火算法等
设计变量:材料的分布和形状
应用领域:汽车、航空航天、机械制 造等
机械设计matlab课程设计
机械设计matlab课程设计一、课程目标知识目标:1. 理解并掌握机械设计中常用的MATLAB命令和功能;2. 学会运用MATLAB进行机械系统建模、仿真和优化;3. 掌握运用MATLAB解决机械设计中的实际问题的方法和步骤。
技能目标:1. 能够运用MATLAB进行数据分析和处理,提高数据处理能力;2. 能够熟练使用MATLAB进行机械设计绘图,提高绘图技能;3. 能够独立完成机械设计相关MATLAB程序编写和调试,提升编程能力。
情感态度价值观目标:1. 培养学生对机械设计MATLAB课程的学习兴趣,激发学习热情;2. 培养学生严谨的科学态度,强调实际操作与理论知识的相结合;3. 增强学生的团队协作意识,培养合作解决问题的能力。
课程性质:本课程为实践性较强的学科,结合机械设计与MATLAB软件应用,注重培养学生的实际操作能力和解决问题的能力。
学生特点:学生具备一定的机械设计基础知识,对MATLAB软件有一定了解,但实际操作能力有待提高。
教学要求:结合课程性质和学生特点,采用任务驱动、案例教学等方法,使学生在实践中掌握知识,提高技能,培养情感态度价值观。
通过分解课程目标为具体学习成果,为教学设计和评估提供明确依据。
二、教学内容1. MATLAB基础命令与操作:介绍MATLAB的基本命令、数据类型、矩阵运算等,为学生后续学习打下基础。
(对应教材第一章)2. MATLAB绘图与可视化:讲解MATLAB绘图功能,如二维、三维图形绘制,让学生能够将机械设计结果可视化。
(对应教材第二章)3. 机械系统建模与仿真:结合教材第三章内容,教授学生如何使用MATLAB 进行机械系统的建模、仿真和结果分析。
4. 机械设计优化方法:介绍教材第四章内容,使学生掌握运用MATLAB进行机械设计优化的基本方法。
5. MATLAB在机械设计中的应用案例:分析教材第五章案例,让学生了解MATLAB在机械设计领域的实际应用。
6. 实践操作与项目实战:组织学生进行实践操作,结合教材内容开展项目实战,巩固所学知识,提高实际操作能力。
机械原理matlab编程
机械原理(Matlab绘图)专业班级学号姓名:图一:导杆的角位移曲线和刨刀的位移曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,180*x3./pi,180*x1./pi,Se/1000);xlabel('x1/(°)'),ylabel('x3(°)');title('导杆的角位移曲线和刨刀的位移曲线');text(150,108,'x3');text(200,60,'Se');grid on;plotedit on;图二:导杆的角速度曲线和刨刀的速度曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,w3,180*x1./pi,Ve/1000);xlabel('x1/(°)'),ylabel('w3(rad/s)');title('导杆的角速度曲线和刨刀的速度曲线');grid on;text(100,-5,'Ve');text(100,1.8,'w3');axis([0 400 -7 4]);plotedit on;图三:导杆的角加速度曲线和刨刀的加速度曲线x1=linspace(0,2*pi,100);l1=100;l3=360;l4=200;l6=200;y=336;w1=2*pi;x3=atan((l6+l1*sin(x1))./(l1*cos(x1)));for i = 1 : 100;if x3(i)<0x3(i)=x3(i)+pi;endendS3=l1*cos(x1)./cos(x3);V23=(-1)*w1*l1*sin(x1-x3);w3=w1*l1*cos(x1-x3)./S3;a23=w3.^2.*S3-w1.^2*l1*cos(x1-x3);A3=(w1.^2.*l1.*sin(x3-x1)-2.*w3.*V23)./S3;x4= atan((y-l3*sin(x3))./l4);Se=l3*cos(x3)+l4*cos(x4);w4=(-1)*w3.*l3.*cos(x3)./(l4.*cos(x4));Ve=(-1)*w3.*l3.*sin(x3-x4)./cos(x4);A4=(x3.^2.*l3.*sin(w3)+x4.^2.*l4.*sin(x4)-A3.*l3.*cos(x3))./(l4.*cos(x4)); ae=(-1)*(A3.*l3.*sin(x3-x4)+w3.^2.*l3.*cos(x3-x4)-w4.^2.*l4)./cos(x4); plotyy(180*x1./pi,A3,180*x1./pi,ae/1000);xlabel('x1/(°)'),ylabel('A3(rad/s^2)'),grid;title('导杆的角加速度曲线和刨刀的加速度曲线');text(250,25,'ae');text(300,50,'A3');plotedit on;图四:凸轮从动件位移曲线h=20;F1=2*pi/3;F2=pi/2;i=1;for x=0:0.01:2*pi;if x>=0&x<=2*pi/3;S(i)=h*(1-cos(pi*x./F1))./2;elseif x>=2*pi/3&x<=pi;S(i)=h;elseif x>=pi&x<=5*pi/4;S(i)=h-2*h*(x-pi).^2./(F2.^2);elseif x>=5*pi/4 &x<=3*pi/2;S(i)= 2*h*(F2-x+pi).^2./(F2.^2); elseif x>=3*pi/2 &x<=2*pi;S(i)=0;endi=i+1;x=0:0.01:2*pi;plot(x,S);title('从动件位移曲线');axis([0 7 0 25]);xlabel('x/(rad)');ylabel('S/(mm)');grid on;图五:凸轮的理论轮廓曲线和实际轮廓曲线e=10;Rt=10;Rb=25;w=2*pi;F1=2*pi/3;F2=pi/2;i=1;for f=0:0.01:2*pi;if f>=0&f<=2*pi/3;S(i)=h*(1-cos(pi*f./F1))./2;elseif f>=2*pi/3&f<=pi;S(i)=h;elseif f>=pi&f<=5*pi/4;S(i)=h-2*h*(f-pi).^2./(F2.^2);elseif f>=5*pi/4 &f<=3*pi/2;S(i)= 2*h*(F2-f+pi).^2./(F2.^2);elseif f>=3*pi/2 &f<=2*pi;S(i)=0;endi=i+1;endf=0:0.01:2*pi;s0=sqrt((Rb.^2)-(e.^2));x =e*cos(f)+(s0+S).*sin(f);y =(s0+S).*cos(f)-e*sin(f);d1=e*(-1).*sin(f).*w+(s0+S).*cos(f).*w;d2=(s0+S).*sin(f).*(-1).*w-e*cos(f).*w;x1=x+Rt*d2./sqrt((d1.^2)+(d2.^2));y1=y-Rt*d1./sqrt((d1.^2)+(d2.^2));plot(x,y,'k-',x1,y1,'k-.');title('凸轮的理论轮廓曲线和实际轮廓曲线'); text(-10,-30,'实际轮廓曲线');text(-10,-40,'理论轮廓曲线');axis([-40 50 -55 40 ]);hold on;plot(0,0);text(0,-3,'O');。
机械原理matlab课程设计

机械原理matlab课程设计一、教学目标本课程的学习目标主要包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握机械原理的基本概念、理论和方法;技能目标要求学生能够运用MATLAB软件进行机械系统仿真和分析;情感态度价值观目标要求学生培养创新意识、团队合作精神和自主学习能力。
通过本课程的学习,学生将能够:1.描述和解释机械原理的基本概念和理论。
2.使用MATLAB软件进行机械系统仿真和分析。
3.提出问题、解决问题并开展创新设计。
4.能够进行团队合作,共同完成项目任务。
二、教学内容教学内容将根据课程目标进行选择和,确保内容的科学性和系统性。
教学大纲将明确教学内容的安排和进度,指出教材的章节和列举内容。
主要内容包括:1.机械原理的基本概念和理论,包括力学、动力学、运动学等方面。
2.MATLAB软件的基本操作和功能,包括矩阵运算、绘图、编程等。
3.机械系统仿真的方法和技巧,包括模型建立、参数调整、结果分析等。
4.机械系统设计案例分析,包括机器人的运动控制、机构的优化设计等。
三、教学方法为了激发学生的学习兴趣和主动性,将采用多种教学方法。
包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过教师的讲解和演示,向学生传授基本概念和理论知识。
2.讨论法:学生进行小组讨论,促进学生之间的交流和思维碰撞。
3.案例分析法:通过分析实际案例,引导学生运用所学知识解决实际问题。
4.实验法:安排实验课程,让学生亲自动手进行实验操作和数据分析。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备适当的教学资源。
包括教材、参考书、多媒体资料和实验设备等。
1.教材:选择权威、实用的教材,作为学生学习的主要参考资料。
2.参考书:推荐一些相关的参考书籍,供学生深入学习和拓展知识。
3.多媒体资料:制作精美的PPT、教学视频等多媒体资料,增强课堂教学的趣味性和效果。
4.实验设备:准备必要的实验设备,让学生能够进行实际操作和验证。
机械原理大作业牛头刨床 matlab编程

l4*cosd(x(2))+l3*cosd(x(3))-x(4);
l4*sind(x(2))+l3*sind(x(3))-h];
主程序:
theta1=0:360;
s3=0:360;
theta3=0:360;
-omega3(i)*cosd(theta3(i)) l4*omega4(i)*sind(theta4(i)) -v3(i)*cosd(theta3(i))+s3(i)*omega3(i)*sind(theta3(i)) 0;
0 l4*omega4(i)*cosd(theta4(i)) l3*omega3(i)*cosd(theta3(i)) 0;
xlabel('{\theta}_1(^{ o })');
ylabel('s_c (mm)');
figure(5)
plot(theta1,vc,'k');
gridon;
xlabel('{\theta}_1(^{ o })');
ylabel('v_c (m/s)');
figure(6)
plot(theta1,ac,'k');
gridon;
xlabel('{\theta}_1(^{ o })');
ylabel('{\alpha}_3 {\alpha}_4 (r a d / s^2)');
legend('{\alpha}_3','{\alpha}_4');
机械原理matlab作业
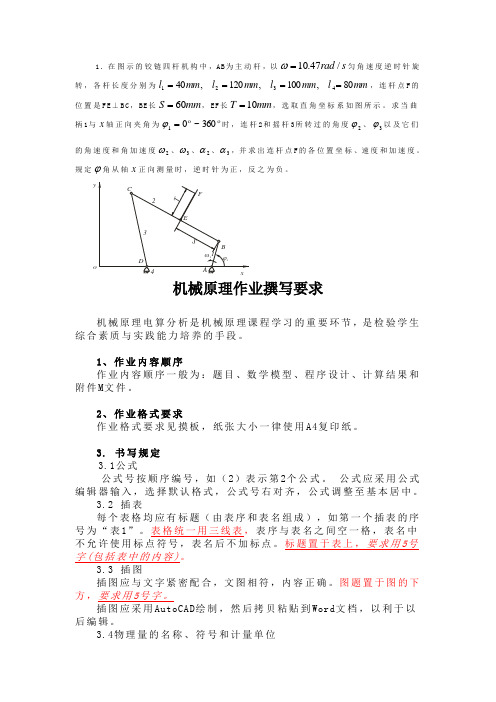
1.在图示的铰链四杆机构中,AB 为主动杆,以s rad /47.10=ω匀角速度逆时针旋转,各杆长度分别为mm l mm l mm l mm l 80,100,120,404321====,连杆点F 的位置是FE ⊥BC ,BE 长mm S 60=,EF 长mm T 10=,选取直角坐标系如图所示。
求当曲柄1与x 轴正向夹角为 360~01=ϕ时,连杆2和摇杆3所转过的角度2ϕ、3ϕ以及它们的角速度和角加速度2ω、3ω、2α、3α,并求出连杆点F 的各位置坐标、速度和加速度。
规定ϕ角从轴x 正向测量时,逆时针为正,反之为负。
y机械原理作业撰写要求机械原理电算分析是机械原理课程学习的重要环节,是检验学生综合素质与实践能力培养的手段。
1、作业内容顺序作业内容顺序一般为:题目、数学模型、程序设计、计算结果和附件M 文件。
2、作业格式要求作业格式要求见摸板,纸张大小一律使用A4复印纸。
3. 书写规定 3.1公式公式号按顺序编号,如(2)表示第2个公式。
公式应采用公式编辑器输入,选择默认格式,公式号右对齐,公式调整至基本居中。
3.2 插表每个表格均应有标题(由表序和表名组成),如第一个插表的序号为“表1”。
表格统一用三线表,表序与表名之间空一格,表名中不允许使用标点符号,表名后不加标点。
标题置于表上,要求用5号字(包括表中的内容)。
3.3 插图插图应与文字紧密配合,文图相符,内容正确。
图题置于图的下方,要求用5号字。
插图应采用AutoCAD 绘制,然后拷贝粘贴到Word 文档,以利于以后编辑。
3.4物理量的名称、符号和计量单位物理量的名称、符号和计量单位应统一按照机械原理教科书的规定书写,某一量的名称、符号和计量单位应与教科书的规定相一致。
4. 排版要求4.1正文字体要求、每部分标题左顶边、小三宋体加粗。
正文文字用宋体小四号汉字和四号“Times New Roman”英文字体,每自然段首行缩进2个字符。
大二机械原理课程设计插床matlab

大二机械原理课程设计插床matlab大二机械原理课程设计:插床MATLAB引言:插床是机床的一种,用于加工金属零件时,通过插刀进行切削。
插床具有切削速度快、工件精度高等优点,被广泛应用于机械制造行业。
本文将介绍一种利用MATLAB进行插床仿真的方法,通过编写MATLAB程序,实现对插床的运动轨迹和切削过程的模拟。
一、插床运动轨迹的建模在插床的运动过程中,刀具需要按照一定的轨迹进行插入和退出。
为了模拟插床的运动轨迹,需要对刀具的运动进行建模。
可以使用MATLAB中的插值函数来实现对插床运动轨迹的模拟。
需要确定插床的初始位置和目标位置。
然后,根据初始位置和目标位置之间的距离,计算出刀具插入或退出的总距离。
接下来,选择合适的插值方法,如线性插值或样条插值,根据总距离和插入或退出时间来计算出刀具在不同位置的坐标。
在MATLAB中,可以使用interp1函数来进行插值计算,根据初始位置、目标位置、总距离和插入或退出时间,得到刀具在不同位置的坐标。
通过绘制这些坐标点,可以得到插床的运动轨迹。
二、插床切削过程的模拟插床的切削过程是通过刀具对工件进行切削来实现的。
为了模拟插床的切削过程,需要对切削力进行建模,并将其应用到插床的运动轨迹上。
根据机械原理课程的知识,切削力与切削速度、切削深度、切削角度等因素有关。
可以通过建立切削力的数学模型,将切削力作用于插床的运动轨迹上,从而实现对插床切削过程的模拟。
在MATLAB中,可以使用函数来定义切削力的数学模型,并将其与插床的运动轨迹相结合。
通过调用这些函数,可以得到插床在不同位置上的切削力。
然后,可以根据切削力的大小和方向,对插床的运动轨迹进行调整,模拟切削过程。
三、插床MATLAB程序的编写根据上述的建模和模拟方法,可以编写一个MATLAB程序来实现对插床的仿真。
首先,需要定义插床的初始位置和目标位置,以及刀具插入或退出的总距离和时间。
然后,通过调用插值函数,得到插床的运动轨迹。
机械原理课程设计,基于MATLAB,SOLIDWORKS,CAMTRAX
目录课题----------------------------------------------------------------------------------- 2 机构总体设计----------------------------------------------------------------------- 3 机构具体设计上冲模机构设计--------------------------------------------------------------- 4 脱模机构设计----------------------------------------------------------------- 21 滚子直动对心盘形凸轮设计----------------------------------------- 21平底推杆直动对心盘形凸轮设计----------------------------------- 34分析比较----------------------------------------------------------------- 45 送粉机构设计------------------------------------------------------------------- 46 设计分析----------------------------------------------------------------- 46摆动推杆凸轮设计------------------------------------------------------ 47连杆机构设计----------------------------------------------------------- 59 机构动力设计----------------------------------------------------------------------- 80 参考文献----------------------------------------------------------------------------- 82课题:粉末成形压机一.工作原理及工艺动作过程粉末冶金是将金属等粉末的混合料,通过压制成型和烧结而制成零件或成品材料的一种工艺方法。
matlab平面连杆结构分析(机械原理课程设计)

平面连杆结构分析
机械原理课程设计
小组成员:
已知:rAE=70mm,rAB=40mm,rEF=60mm,rDE=35mm,rCD=75mm,rBC=50mm,原动件以
等角速度 w1=10rad/s 回转。试以图解法求在θ1=50°时 C 点的速度 VC 和加速度
对机构进行位置分析: 由封闭形 ABCDEA 与 AEFA 有:
-x(8)*sin(theta4); 0 x(6)*cos(theta2) -x(7)*cos(theta3)
x(8)*cos(theta4); cos(x(1)) 0 0 x(11)*sin(theta4); sin(x(1)) 0 0 -x(11)*cos(theta4)];
dth=inv(J)*(-1.0*f); lA=lA+dth(1); theta2=theta2+dth(2); theta3=theta3+dth(3); theta4=theta4+dth(4);
1.6796 1.7250 1.7709 1.8174 1.8646 1.9126 1.9616 2.0118 2.0635 2.1169 2.1728 2.2319
输出的 P、矩阵的第二列到第四列分别是θ2 θ3 θ 、4 4 的值,第一列是
AF 杆的长度 r1’。
第二步根据速度方程式编写如下 rrrvel.m 函数:
0.6815 0.6703 0.6592 0.6482 0.6372 0.6263 0.6154 0.6043 0.5930 0.5812 0.5687 0.5551
2.5963 2.6147 2.6339 2.6539 2.6747 2.6965 2.7192 2.7431 2.7683 2.7950 2.8237 2.8549
机械原理课程设计源程序
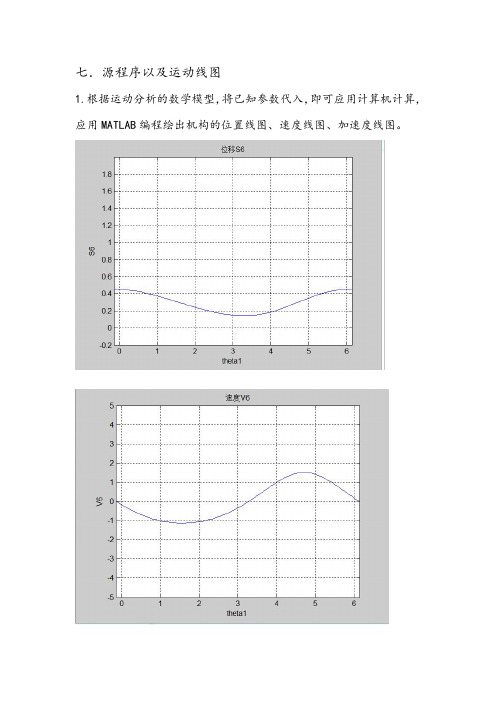
七.源程序以及运动线图1.根据运动分析的数学模型,将已知参数代入,即可应用计算机计算,应用MATLAB编程绘出机构的位置线图、速度线图、加速度线图。
结果分析:牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。
由图看出刨头在工作行程中,刨头的速度比较平稳,基本符合要求。
刨头在空回行程中,刨刀回程速度较高,符合生产力的要求。
2.应用计算机计算,用MATLAB编程作出机构的惯性力及惯性力矩图、原动件上的平衡力矩Mp图。
Mp= -FR32x×L2sinφ-FR32y×L2cosφ由图中看出刨刀在其要求的实际工作区力矩较为平稳,能够顺利完成切削运动。
综合看来,设计尺寸基本符合实际要求。
3.源程序clear all;clc;theta1=linspace(-8.16,351.84,100);theta1=theta1*pi/180;W1=80*pi/30;H=0.32;L1=0.092;L3=1.095;L4=0.300;L6=0.650;L6u=1.089;Z=pi/180;S3=((L6)^2+(L1)^2-2*L6*L1*cos(theta1+pi/2)).^0.5;for i=1:100theta3(i)=acos(L1*cos(theta1(i))/S3(i));theta4(i)=asin((L6u-L3*sin(theta3(i)))/L4);S6(i)=L3*cos(theta3(i))+L4*cos(theta4(i));endfor i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1;0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);K=J*W1*[-L1*sin(theta1(i));L1*cos(theta1(i));0;0];VS3(i)=K(1);W3(i)=K(2);W4(i)=K(3);V6(i)=K(4);endfor i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1;0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);P=W1*W1*[-L1*cos(theta1(i));-L1*sin(theta1(i));0;0];M=[-W3(i)*sin(theta3(i)),-VS3(i)*sin(theta3(i))-S3(i)*W3(i)*cos(t heta3(i)),0,0;W3(i)*cos(theta3(i)),VS3(i)*cos(theta3(i))-S3(i)*W3(i)*sin(theta3 (i)),0,0;0,-L3*W3(i)*cos(theta3(i)),-L4*W4(i)*cos(theta4(i)),0; 0,-L3*W3(i)*sin(theta3(i)),-L4*W4(i)*sin(theta4(i)),0]; N=[VS3(i);W3(i);W4(i);V6(i)];K=J*(-M*N+P);aS3(i)=K(1);a4(i)=K(2);a5(i)=K(3);a6(i)=K(4);endG4=160;G5=40;G6=680;Fc=1600; m4=16;m5=4;m6=68;J4=1.6;J5=0.03;uJ4=J4+m4*0.5*0.5*L3*L3;a(i)=L4*cos(theta4(i))/cos(theta3(i));b=0.5*L4;L7(i)=((a(i))^2+(b)^2-2*a(i)*b*cos(theta3(i)-theta4(i))).^0.5; theta6(i)=asin(b*sin((theta3(i))-(theta4(i)))/L7(i));theta9(i)=pi*0.5-theta3(i)-theta6(i);F5x(i)=-m5*a5(i)*L7(i)*cos(theta6(i))+m5*W4(i)*W4(i)*L7(i)*sin(th eta9(i));F5y(i)=-m5*a5(i)*L7(i)*sin(theta6(i))+m5*W4(i)*W4(i)*L7(i)*cos(th eta9(i));F4x(i)=-m4*a4(i)*L3*0.5*sin(theta3(i))-m4*0.5*W3(i)*W3(i)*L3*cos( theta3(i));F4y(i)=-m4*a4(i)*L3*0.5*cos(theta3(i))-m4*0.5*W3(i)*W3(i)*L3*sin( theta3(i));M4(i)=-uJ4*a4(i);M5(i)=-J5*a5(i);F6(i)=-m6*a6(i);for i=1:100if((abs(S6(1)-S6(i))>0.05*H && abs(S6(1)-S6(i))<=0.95*H)&&(theta1(i)<=(1.1*pi)))Fc(i)=-1400*9.8;elseFc(i)=0;endendfor i=1:100Q=inv([-L1*sin(theta1(i)),-L1*cos(theta1(i)),1,0,0,0,0,0,0,0; 1,0,0,1,0,-1,0,0,0,0;0,1,0,0,1,0,-1,0,0,0;-(0.5*L3-S3(i))*sin(theta3(i)),-(0.5*L3-S3(i))*cos(theta3(i)),0,-0.5*L3*sin(theta3(i)),-0.5*L3*cos(theta3(i)),0.5*L3*sin(theta3(i) ),-0.5*L3*cos(theta3(i)),0,0,0;0,0,0,0,0,-1,0,-1,0,0;0,0,0,0,0,0,1,0,-1,0;0,0,0,0,0,0.5*L4*sin(theta4(i)),-0.5*L4*cos(theta4(i)),0.5*L4*sin (theta4(i)),-0.5*L4*cos(theta4(i)),0;0,0,0,0,0,0,0,1,0,0;0,0,0,0,0,0,0,0,1,1;1,tan(theta3(i)),0,0,0,0,0,0,0,0]);T=[0;-F4x(i);m4*9.8-F4y(i);-M4(i);-F5x(i);m5*9.8-F5y(i);M5(i);-F6 (i)-Fc(i);m6*9.8;0];PA=Q*T;F12x(i)=PA(1);F12y(i)=PA(2);Mp(i)=PA(3);F14x(i)=PA(4);F14y(i)=PA(5);F45x(i)=PA(6);F45y(i)=PA(7);F56x(i)=PA(8);F56y(i)=PA(9);F16(i)=PA(10);endfigure(1);plot(theta1,S6);xlabel('theta1');ylabel('S6');title('位移S6');grid on;axis([theta1(1) ,theta1(100),-0.2,2]);figure(2);plot(theta1,V6);xlabel('theta1')ylabel('V6');title('速度V6');grid on;axis([theta1(1) ,theta1(100),-5,5]); figure(3);plot(theta1,a6);xlabel('theta1');ylabel('a6');title('加速度a6');grid on;axis([theta1(1) ,theta1(100),-80,80]); figure(4);plot(theta1,Mp);xlabel('Theta1');ylabel('力矩');axis([theta1(1) ,theta1(100),-50,300]); title('平衡力矩');grid on;figure(4);plot(theta1,-uMpp,'r');xlabel('theta11');ylabel('Mp');grid on;axis([theta1(1) ,theta1(100),-50,3000]);。
机械原理课程设计 偏置直动滚子推杆盘形凸轮

凸轮大作业选题:凸轮5-C一:题目及原始数据:利用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计,已知数据如下所示,凸轮沿逆时针方向做匀速运动。
具体要求如下:1.推程运动规律为等加速等减速运动,回程运动规律为五次多项式运动;2.近休凸轮转角为0°-30°;推程凸轮转角30°-210°;远休凸轮转角210°-280°;回程凸轮转角280°-360。
°3.初选基圆半径为22mm;4.偏距为+14mm5.滚子半径为18mm6.推杆行程为35mm7.许用压力角为α1=35°,α2=65°。
8.最小曲率半径为0.35r r9.计算点数取120.二:推杆运动规律及凸轮轮廓线方程1.推程加速阶段:s1=70.*a1.*a1/pi/pi;x1=(s0+s1).*sin(a1)+e*cos(a1);y1=(s0+s1).*cos(a1)-e*sin(a1);k1=140*a1/pi^2;i1=[(k1-e).*sin(a1)+(s0+s1).*cos(a1)].*[(k1-e).*(k1-e)+(s0+ s1).*(s0+s1)].^(-1/2);j1=[-(k1-e).*cos(a1)+(s0+s1).*sin(a1)].*[(k1-e).*(k1-e)+(s0 +s1).*(s0+s1)].^(-1/2);x10=x1-18*j1;y10=y1-18*i1;2.推程减速阶段:s11=35-70.*(pi-a11).*(pi-a11)/pi/pi;x11=(s0+s11).*sin(a11)+e*cos(a11);y11=(s0+s11).*cos(a11)-e*sin(a11);k11=140.*(pi-a1)/pi^2;i11=[(k11-e).*sin(a11)+(s0+s11).*cos(a11)].*[(k11-e).*(k11-e)+(s0+s11).*(s0+s11)].^(-1/2);j11=[-(k11-e).*cos(a11)+(s0+s11).*sin(a11)].*[(k11-e).*(k11 -e)+(s0+s11).*(s0+s11)].^(-1/2);x101=x11-18*j11;y101=y11-18*i11;3.远休阶段:x2=(s0+s2).*sin(a2)+e*cos(a2);y2=(s0+s2).*cos(a2)-e*sin(a2);k2=0;i2=[(k2-e).*sin(a2)+(s0+s2).*cos(a2)].*[(k2-e).*(k2-e)+(s0+ s2).*(s0+s2)].^(-1/2);j2=[-(k2-e).*cos(a2)+(s0+s2).*sin(a2)].*[(k2-e).*(k2-e)+(s0 +s2).*(s0+s2)].^(-1/2);x20=x2-18*j2;y20=y2-18*i2;4.回程阶段:a30=33*pi/18-a3;s3=(350.*a30.*a30.*a30/(4*pi/9)^3-525.*a30.*a30.*a30.*a30/( 4*pi/9)^4+210.*a30.*a30.*a30.*a30.*a30/(4*pi/9)^5);x3=(s0+s3).*sin(a3)+e*cos(a3);y3=(s0+s3).*cos(a3)-e*sin(a3);k3=-1050.*a30.*a30/(4*pi/9)^3+2100.*a30.*a30.*a30/(4*pi/9)^ 4-1050.*a30.*a30.*a30.*a30/(4*pi/9)^5;i3=[(k3-e).*sin(a3)+(s0+s3).*cos(a3)].*[(k3-e).*(k3-e)+(s0+ s3).*(s0+s3)].^(-1/2);j3=[-(k3-e).*cos(a3)+(s0+s3).*sin(a3)].*[(k3-e).*(k3-e)+(s0 +s3).*(s0+s3)].^(-1/2);x30=x3-18*j3;y30=y3-18*i3;5.近休阶段:s4=0;x4=(s0+s4).*sin(a4)+e*cos(a4);y4=(s0+s4).*cos(a4)-e*sin(a4);k4=0;i4=[(k4-e).*sin(a4)+(s0+s4).*cos(a4)].*[(k4-e).*(k4-e)+(s0+ s4).*(s0+s4)].^(-1/2);j4=[-(k4-e).*cos(a4)+(s0+s4).*sin(a4)].*[(k4-e).*(k4-e)+(s0 +s4).*(s0+s4)].^(-1/2);x40=x4-18*j4;y40=y4-18*i4;三:matlab计算程序e=14;r0=22s0=sqrt(r0^2-e^2);c111=1;c3=1;for(i=1:0.1:200) %由压力角条件循环求合适基圆半径if (c111<35/180)&&(c3<65/180) %判断条件else a1=0:pi/60:pi/2; % 推程加速阶段 s1=70.*a1.*a1/pi/pi;x1=(s0+s1).*sin(a1)+e*cos(a1);y1=(s0+s1).*cos(a1)-e*sin(a1);k1=140*a1/pi^2; % 对s1求导i1=[(k1-e).*sin(a1)+(s0+s1).*cos(a1)].*[(k1-e).*(k1-e)+(s0+ s1).*(s0+s1)].^(-1/2);j1=[-(k1-e).*cos(a1)+(s0+s1).*sin(a1)].*[(k1-e).*(k1-e)+(s0 +s1).*(s0+s1)].^(-1/2);x10=x1-18*j1;y10=y1-18*i1;a11=pi/2:pi/60:pi; % 推程减速阶段s11=35-70.*(pi-a11).*(pi-a11)/pi/pi;x11=(s0+s11).*sin(a11)+e*cos(a11);y11=(s0+s11).*cos(a11)-e*sin(a11);k11=140.*(pi-a1)/pi^2;i11=[(k11-e).*sin(a11)+(s0+s11).*cos(a11)].*[(k11-e).*(k11-e)+(s0+s11).*(s0+s11)].^(-1/2);j11=[-(k11-e).*cos(a11)+(s0+s11).*sin(a11)].*[(k11-e).*(k11 -e)+(s0+s11).*(s0+s11)].^(-1/2);x101=x11-18*j11;y101=y11-18*i11;a2=pi:pi/60:25*pi/18; %凸轮远休阶段s2=35;%推杆行程x2=(s0+s2).*sin(a2)+e*cos(a2);y2=(s0+s2).*cos(a2)-e*sin(a2);k2=0;i2=[(k2-e).*sin(a2)+(s0+s2).*cos(a2)].*[(k2-e).*(k2-e)+(s0+ s2).*(s0+s2)].^(-1/2);j2=[-(k2-e).*cos(a2)+(s0+s2).*sin(a2)].*[(k2-e).*(k2-e)+(s0 +s2).*(s0+s2)].^(-1/2);x20=x2-18*j2;y20=y2-18*i2;a3=25*pi/18:pi/60:33*pi/18;%推杆回程阶段a30=33*pi/18-a3;s3=(350.*a30.*a30.*a30/(4*pi/9)^3-525.*a30.*a30.*a30.*a30/( 4*pi/9)^4+210.*a30.*a30.*a30.*a30.*a30/(4*pi/9)^5);x3=(s0+s3).*sin(a3)+e*cos(a3);y3=(s0+s3).*cos(a3)-e*sin(a3);k3=-1050.*a30.*a30/(4*pi/9)^3+2100.*a30.*a30.*a30/(4*pi/9)^ 4-1050.*a30.*a30.*a30.*a30/(4*pi/9)^5;i3=[(k3-e).*sin(a3)+(s0+s3).*cos(a3)].*[(k3-e).*(k3-e)+(s0+ s3).*(s0+s3)].^(-1/2);j3=[-(k3-e).*cos(a3)+(s0+s3).*sin(a3)].*[(k3-e).*(k3-e)+(s0 +s3).*(s0+s3)].^(-1/2);x30=x3-18*j3;y30=y3-18*i3;a4=33*pi/18:pi/60:2*pi;%推杆近休阶段s4=0;x4=(s0+s4).*sin(a4)+e*cos(a4);y4=(s0+s4).*cos(a4)-e*sin(a4);k4=0;i4=[(k4-e).*sin(a4)+(s0+s4).*cos(a4)].*[(k4-e).*(k4-e)+(s0+ s4).*(s0+s4)].^(-1/2);j4=[-(k4-e).*cos(a4)+(s0+s4).*sin(a4)].*[(k4-e).*(k4-e)+(s0 +s4).*(s0+s4)].^(-1/2);x40=x4-18*j4;y40=y4-18*i4;plot(x10,y10,'-g*',x101,y101,'-g+',x20,y20,'-r*',x30,y30,'-b*',x40,y40,'-k*',x1,y1,'-g*',x11,y11,'-g+',x2,y2,'-r*',x3,y3,'-b*',x4,y4,'-k*')%凸轮轮廓曲线绘制title(‘凸轮轮廓曲线绘制');xlabel('Variable X'); %X轴ylabel('Variable Y'); %Y轴text(-250,-200,'工作廓线') %文字标注text(100,-100,'理论廓线');grid on %加网格axis equal%坐标相等a1=0:pi/60:pi/2;%压力角计算force1=abs(atan((k1).*(s0+s1).^-1)); c1=max(force1);a11=pi/2:pi/60:pi;force11=abs(atan((k11).*(s0+s11).^-1));c11=max(force11);c111=max(c1,c11);a2=pi:pi/60:25*pi/18;force2=abs(atan((k2).*(s0+s2).^-1));c2=max(force2);a3=25*pi/18:pi/60:33*pi/18;force3=abs(atan((k3).*(s0+s3).^-1));c3=max(force3);a4=33*pi/18:pi/60:2*pi;force4=abs(atan((k4).*(s0+s4).^-1));c4=max(force4);r0=r0+1; %每循环一次基圆半径+1s0=sqrt(r0^2-e^2);endend%求最大压力角位置c111c3[m1,n1]=sort(force1);bend1=n1(end-1+1:end)jiaodu1=(bend1(end)-1)*3[m11,n11]=sort(force11);bend11=n11(end-1+1:end)jiaodu11=(bend11(end)-1)*3+90 [m3,n3]=sort(force3);bend3=n3(end-1+1:end)jiaodu=(bend3(end)-1)*3+250vv=i1./j1;vv1=diff(vv);vv2=diff(vv,2);vv22=[0,vv2];p=(1+vv1.^2).^(3/2)./vv22;g=min(p)vv1=i11./j11;vv11=diff(vv1);vv21=diff(vv1,2);vv221=[0,vv21];p1=(1+vv11.^2).^(3/2)./vv221;g1=min(p1)vv2=i2./j2;vv222=diff(vv2);vv223=diff(vv2,2);vv2211=[0,vv223];p2=(1+vv222.^2).^(3/2)./vv2211;g2=min(p2)vv=i3./j3;vv1=diff(vv);vv2=diff(vv,2);vv22=[0,vv2];p=(1+vv1.^2).^(3/2)./vv22;g3=min(p)vv=i4./j4;vv1=diff(vv);vv2=diff(vv,2);vv22=[0,vv2];p=(1+vv1.^2).^(3/2)./vv22;g4=min(p))ro=sqrt(s0^2+e^2) %求合适基圆半径x1y1x11y11x2y2x3y3x4y4x10y10x101y101x20y20x30y30x40y40force1force11force2force3force4c111c3jiaodu11jiaodu3四:计算结果及分析:(1)工作廓线坐标:1;推程加速阶段X坐标14 24.9479312972938 35.8335795427018 46.6331664128873 57.323071617132667.8798591305935 78.2803034241300 88.5014157831108 98.5204708048515108.315033160764 117.862984704875 127.142552005136 136.132334367976144.811332419744 153.158977301315 161.155160523920 168.780264525614176.015193958402 182.841407726263 189.240951783976 195.196492695966200.691351943287 205.709540955551 210.235796832989 214.255618712129 217.755304716715 220.721989423648 223.143681761924 225.009303250807226.308726472013 227.0328136593412推程加速阶段Y坐标209.532813659341 208.532370629552 206.998924199561 204.935879972465202.347567871334 199.239236813805 195.617049448531 191.488076931747186.860293712014 181.742572281261 176.144677840557 170.0772******** 163.551861181761 156.580882432274 149.177605251176 141.356170650697133.131574562033 124.519659744732 115.537106908501 106.20142493273596.5309400655771 86.5447839816669 76.2628805759777 65.705931370278654.8953994088027 43.8534915206956 32.6031388287473 21.16797538678679.57231483194954 -2.15887505719948 -14.00000000000003推程减速阶段X坐标227.032813659341 227.134619685286 226.568905051752 225.331644205755 223.421214513810 220.838411540547 217.586454974950 213.670985176905209.100050353069 203.884084407342 198.0358******** 191.570525763878184.505401336072 176.860074548737 168.656256843411 159.917723656843150.670231233150 140.941425726738 130.760744942876 120.159313091203109.169828954466 97.8264479001947 86.1646581868564 74.221152038085562.0336919788640 49.6409729459048 37.0824807009210 24.398347089867511.6292027035831 -1.18397249451846 -14.00000000000004推程减速阶段Y坐标-14.0000000000000 -25.9228338599749 -37.8904674143353 -49.8635381159681 -61.8024134893063 -73.6673405558026 -85.4185959941913 -97.0166364509177 -108.422248415730 -119.596697079292 -130.501873593764 -141.100440163605 -151.355972402351 -161.233098401750 -170.697633972432 -179.716713530067 -188.258916117849 -196.294386074865 -203.794947880574 -210.734214728044 -217.0876******** -222.832864069368 -227.949297596606 -232.418705078147 -236.225024238547 -239.354479443456 -241.795636066125 -243.539445995213 -244.579284102998 -244.910975527746 -244.5328136593415远休阶段X坐标-14.0000000000000 -26.7786721222032 -39.4839457654822 -52.0809966579133 -64.5352971586108 -76.8127108955902 -88.8795863311907 -100.702848998602 -112.250092156677 -123.489665614559 -134.390762482652 -144.923503612169 -155.059019491793 -164.769529377011 -174.028********* -182.810305697758 -191.0911******** -198.848174053764 -206.060195464824 -212.707420203182 -218.771628687875 -224.236199344965 -229.086154166116 -233.308199762282 6远休阶段Y坐标-244.532813659341 -243.464986549453 -241.729838834477 -239.332126433691 -236.278421310122 -232.577093457254 -228.238287957455 -223.273897175014 -217.697528159994 -211.524465352257 -204.771628687875 -197.457527222762 -189.602208400634 -181.227203104369 -172.355466641343 -163.011315824535 -153.220362321829 -143.009442456216 -132.406543649295 -121.440727709697 -110.142051176688 -98.5414829372844 -86.6708193426842 -74.5625970566802 7减速阶段X坐标-234.573962542258 -237.924423961410 -240.528414701632 -242.301034179885 -243.179109387654 -243.122053300159 -242.111828793401 -240.152099129043 -237.266657296952 -233.497236106624 -228.900808808014 -223.546496133102 -217.512199933386 -210.881086014932 -203.738039329490 -196.166213373622 -188.243792502170 -180.0410******** -171.618025436311 -163.022********* -154.287835944964 -145.434490148429 -136.467891333878 -127.380539946257 -118.153582814159 -108.759487623767 -99.16559150875688减速阶段Y坐标-70.4794512845940 -58.1011116825609 -45.5418784536957 -32.8365161989020 -20.0390090002643 -7.21694579130250 5.55380225566372 18.194003075560030.6254874984057 42.7749931638176 54.5773610652433 65.978032703814576.9348117792082 87.4188705720677 97.4149974868349 106.921098432862115.946980634777 124.512462892978 132.644871079527 140.375991577690147.738568287212 154.762440563530 161.470429890068 167.874092062809173.969459073374 179.732900602872 185.1172389914419近休X坐标-92.6420511766881 -82.6518154464002 -72.4350368350310 -62.0197188225945 -51.4344090718031 -40.7081211809080 -29.8702551594429 -18.9505168448415 -7.97883648080264 3.01471331942776 13.999999999999910近休Y坐标1 188.460739555420 193.050970998372 197.112063148625 200.632884834880203.603785729623 206.016622800007 207.864782627336 209.143199533988209.848369468082 209.978359607845 209.532813659341(2)理论廓线坐标;推程加速阶段X坐标12.8000000000000 22.8728273179084 32.8885297342726 42.825360681316652.6617133932777 62.3761432336542 71.9473900632018 81.354400741436490.5763518517692 99.5926727370081 108.383068927807 116.927546041764125.206434225271 133.200413203958 140.890538000620 148.258265371979155.285481007489 161.954527524708 168.248233286539 174.149942056033179.643543494319 184.713504496809 189.344901352090 193.523452696839197.235553228942 200.468308129584 203.209568133643 205.447965176251 207.172948531918 208.374821351328 209.044777489697推程加速阶段Y坐标191.572858202826 190.652383395923 189.241484022951 187.343250393275 184.961604006512 182.101293199539 178.767888983898 174.967781050798170.708173911217 165.997083129187 160.843331597179 155.256545793692149.247151954669 142.826372082411 136.006219708068 128.799495316842121.219781338553 113.281436600464 104.999590134052 96.390134222989187.4697165758390 78.2557315040260 68.7663099834431 59.020308476717649.0372963926355 38.8375420595755 28.4419970910307 17.87227902341457.15065210936054 -3.69999384635310 -14.6561667163081推程减速阶段X坐标209.193734991700 209.188778273809 208.573036193737 207.342473187261 205.495287697520 203.0319******** 199.955103403567 196.269775760348191.983156349172 187.104683111356 181.645993349332 175.620886984768169.0452******** 161.937156885096 154.316496362355 146.205213858842137.627077770212 128.607625755855 119.174072750844 109.35521228870799.1813115200797 88.6840003369476 77.8961550352902 66.851776970326355.5858666782191 44.1342939559169 32.5336644067296 20.82118297320159.03451499079487 -2.78835469420737 -14.6092639913715推程减速阶段Y坐标-16.4015145824514 -27.3181030218633 -38.2760890490105 -49.2392576762938 -60.1711110106104 -71.0350090000076 -81.7943109934888 -92.4125175513741 -102.853********* -113.0812******** -123.060653160544 -132.757237971647 -142.137258475553 -151.167983975963 -159.817777845352 -168.0562******** -175.854233625249 -183.184184769079 -190.020********* -196.337291242469 -202.113395111709 -207.327521359409 -211.960806247121 -215.996393696655 -219.419502857395 -222.217487685822 -224.379888298036 -225.898473888143 -226.767277038293 -226.982619279687 -226.543127798025远休阶段X坐标-12.9711482618274 -24.8107233108544 -36.5822938918588 -48.2535949481094 -59.7926362546736 -71.1677901013991 -82.3478779822689 -93.3022560535201 -104.000899126289 -114.414482963567 -124.514464655894 -134.273160855494 -143.663823654403 -152.660713898624 -161.239171737366 -169.375684213972 -177.0479******** -184.234939088932 -190.916953302526 -197.0756******** -202.694230799421 -207.757213383730 -212.250747887182 -216.162517844044远休阶段Y坐标-226.562241489795 -225.572888364055 -223.965255630689 -221.743749699274 -218.914459563151 -215.485140109924 -211.465190865844 -206.865630232365 -201.699065285474 -195.979657220565 -189.723082537593 -182.946490072876 -175.668453995324 -167.908922895934 -159.689165110094 -151.0317******** -141.960288314811 -132.499762924347 -122.676064893652 -112.516120296192 -102.0477******** -91.2997275085610 -80.3014319762869 -69.0830358006497回程阶段X坐标-217.335260464284 -220.421346316413 -222.795183195622 -224.398577389943 -225.188547506355 -225.137585355545 -224.233655449440 -222.479896624979 -219.893983296304 -216.507098988589 -212.362488116223 -207.513585489574 -202.021********* -195.953825087341 -189.379262026933 -182.367612804067 -174.985894648424 -167.296364561343 -159.354690783951 -151.208619312605 -142.897173644983 -134.450395994491 -125.889635960919 -117.228428433346 -108.474068637267 -99.6300563428237 -90.6995930141100回程阶段Y坐标-65.2999580017652 -53.9008411016096 -42.4544037000726 -30.9651421357433 -19.4561855319938 -7.96455046569805 3.46312822959339 14.774462367317425.9148401896814 36.8306478920168 47.4721553190688 57.795992842225267.7671217377121 77.3601986319145 86.5602513186570 95.3626114072227103.772082503801 111.801357318003 119.468732676936 126.795209558515133.801107529679 140.502367786106 146.906758880859 153.010*********158.793589895652 164.219890434419 169.232439040273近休阶段X坐标-84.7013039329720 -75.5673741224230 -66.2263193920283 -56.7037429235150 -47.0257454370771 -37.2188536511159 -27.3099475743478 -17.3261868295693 -7.29493621101956 2.75630932061967 12.8000000000000近休阶段Y坐标172.306961879241 176.503744912797 180.216743450172 183.435780420462 186.152032667084 188.358055131435 190.0478******** 191.216639573932191.861366370818 191.980214498602 191.572858202826凸轮压力角0 0.00354431855997765 0.00708657544025155 0.0106247131274339 0.01415668242241860.0176804465517903 0.0211939852247537 0.0246952986180828 0.02818241127214470.0316533758817331 0.0351062769662460 0.0385392344046481 0.04195040682166590.0453379948127508 0.0487002439965149 0.0520354478845675 0.05534195055995420.0586181491567104 0.0618624961343669 0.0650735013425822 0.06824973387240840.0713898236920071 0.0744924630659183 0.0775564077582259 0.08058047802116060.0835635593718112 0.0865046031606886 0.0894026269368794 0.09225671461544470.0950660164535557 0.09782974884260520.193821958696751 0.189734216357270 0.185711813762507 0.1817521166416040.177852583825628 0.174010762147141 0.170224281603430 0.1664908507660410.162808252420337 0.159174339419789 0.155587030740642 0.1520443077234660.148544210488885 0.145084834515539 0.141664327368999 0.1382808855710030.134932751598957 0.131618********* 0.128335589653967 0.1250832510466050.121859593761707 0.118663048967569 0.115492078020447 0.1123451701345160.109220840117705 0.106117626166793 0.103034087715421 0.09996880332880770.0969203686391774 0.0938873943159862 0.09086850406519340 0.00400661352098117 0.0148078747736643 0.0306996316187834 0.05014161972168330.0717513439654380 0.0942968396397606 0.116689817584795 0.1379787986736630.157341636795524 0.174077401612658 0.187598363402544 0.1974234691999150.203175079625608 0.204580805091460 0.201482016062883 0.1938499534402010.181809249049959 0.165667032050483 0.145943761057100 0.1233999352907570.0990517714422343 0.0741698891884142 0.0502587840423935 0.02902100443043590.0123165659206908 0.00213229641216247推程最大压力角:0.193821958696751*180出现位置:90回程最大压力角:0.204580805091460*180出现位置292最小曲率半径:g2=4.2145<0.35*18故满足要求最后确定基圆半径:ro = 211五:凸轮机构图六:体会和建议在本次设计中,对凸轮结构的各项参数对最终凸轮形状的影响有了更深刻的认识。
机械工程实验——matlab实验报告

机械工程实验——matlab实验报告1. 引言机械工程是一个涵盖广泛的领域,其实验课程可以帮助学生理解和应用机械原理、设计和制造等方面的知识。
本实验报告将介绍一个基于Matlab软件的机械工程实验,在实验中我们将使用Matlab进行数据分析和建模。
通过这个实验,我们可以深入理解机械工程中的一些重要概念,并学习如何使用Matlab软件进行相关分析。
2. 实验目标本实验旨在通过使用Matlab软件来深入了解机械工程中的一些基本概念,包括数据分析、建模和仿真。
具体目标如下:•学习如何使用Matlab进行数据分析,包括数据的导入、处理和可视化。
•掌握Matlab中常用的数据建模和仿真方法。
•理解机械工程中的一些基本原理,并应用到实验中。
•分析实验结果并提出相应的结论。
3. 实验方法本实验主要分为四个步骤,分别是数据导入与处理、数据可视化、数据建模与仿真以及结果分析。
具体的实验方法如下:3.1 数据导入与处理首先,我们需要收集实验数据,并将数据导入到Matlab软件中。
可以使用Matlab的csvread函数将CSV格式的数据文件导入到Matlab。
然后,我们需要对数据进行预处理,例如去除异常数据和补充缺失数据等。
3.2 数据可视化在数据导入和处理完毕后,我们可以使用Matlab的数据可视化工具对数据进行可视化分析。
例如,可以使用Matlab的plot函数绘制数据的折线图,或者使用scatter函数绘制数据的散点图。
通过可视化分析,我们可以更清晰地了解数据的分布规律。
3.3 数据建模与仿真在数据可视化之后,我们可以使用Matlab的数据建模工具对数据进行建模和仿真。
例如,可以使用Matlab的回归分析工具对数据进行回归分析,并得到拟合的曲线。
此外,还可以使用Matlab的仿真工具对数据进行仿真实验,以验证建立的模型的准确性和有效性。
3.4 结果分析最后,我们需要对实验结果进行分析,并提出相应的结论。
可以比较实验结果与理论预期结果的差异,并对差异进行分析。
机械原理课程设计Matlab编程
/*Matlab程序*/l1 = 59.1000;l2 = 263.9000;l3=120;l4=266.83;l5=180;l6=45;x2=170;y2=132.7289;w1=9.4248;N=42:10:402;ay=119:10:479a=2*l1*l3*sin(N/180*pi);b=2*l3*(l1*cos(N/180*pi)-l4);c=l2^2-l1^2-l3^2-l4^2+2*l1*l4*cos(N/180*pi);jiao3=2*atan((a- sqrt(a.^2+b.^2-c.^2))./ (b-c))/pi*180+77g=2*l1*l2*sin(N/180*pi);h=2*l2*(l1*cos(N/180*pi)-l4);m=l1^2+l2^2+l4^2-l3^2-2*l1*l4*cos(N/180*pi);jiao2=2*atan((g- sqrt(g.^2+h.^2-m.^2))./ (h-m))/pi*180+77lof=-sqrt(l6^2-x2^2-l5^2+2*l5*x2*cos((180+jiao3)/180*pi)+l5^2*sin(j iao3/180*pi).^2)+y2-l5* sin((180+jiao3)/180*pi)j12=N-(jiao2-77);j32=jiao3-jiao2;j13=(N-(jiao3-77));j23=(jiao2-jiao3);w3=(w1*l1*sin(j12/180*pi))./ (l3*sin(j32/180*pi))w2=(-1*w1*l1*sin(j13/180*pi))./(l2*sin(j23/180*pi))a3=(w1^2*l1*cos(j12/180*pi)+w2.^2*l2-(w3.^2).*(l3*cos(j32/180*pi)) )./ (l3*sin(j32/180*pi))a2=(-w1^2*l1*cos(j13/180*pi)-(w2.^2).*(l2*cos(j23/180*pi))+l3*w3.^ 2)./ (l3*sin(j23/180*pi))jiao4=acos((x2-l5*cos((180+jiao3)/180*pi))/l6)/pi*180w4=((-l5*sin((pi+jiao3)/180*pi)).*w3)./ (l6*sin(jiao4/180*pi))vof=((l5*sin((180+jiao3-jiao4)/180*pi)).*w3).* sin(jiao4/180*pi)aof=(l6*w4.^2+(l5*w3.^2).*(cos((180+jiao3-jiao4)/180*pi))+l5*a3.*si n((180+jiao3-jiao4)/180*pi))./sin(jiao4/180*pi)作图程序:/*F点的位移*/plot(N+77,lof,'-xk')xlabel('AB杆的角度'),ylabel('F点的位移/(mm)')title('F点的位移曲线图')text(100, 171.3339,'初始值= 171.3339')text(425, 171.3339,'最高值= 180')/*F点的速度*/plot(N+77,vof,'-xk')text(100,-285,'初始值= -347.0624')text(390,-430,'终点值= -347.0624')xlabel('AB杆的角度'),ylabel('F点的速度/(mm/s)')title('F点的速度曲线图')/*F点的加速度*/plot(N+77,aof,'-xk')xlabel('AB杆的角度'),ylabel('F点的加速度/(mm/s^2)')title('F点的加速度曲线图')text(100, 1.0e+004 *-0.9848,'初始值= 1.0e+004 *(-0.9048)') text(350, 1.0e+004 *-0.9048,'终点值= 1.0e+004 *(-0.9048)')/*结果*/ay =Columns 1 through 20119 129 139 149 159 169 179 189 199 209 219 229 239 249 259 269 279 289 299 309Columns 21 through 37319 329 339 349 359 369 379 389 399 409 419 429 439 449 459 469 479jiao3 =Columns 1 through 12152.7283 155.6055 159.2201 163.3851 167.9364 172.7308 177.6411 182.5508 187.3495 191.9295 196.1844 200.0109Columns 13 through 24203.3123 206.0053 208.0272 209.3409 209.9360 209.8245 209.0330 207.5944 205.5410 202.9003 199.6946 195.9435Columns 25 through 36191.6697 186.9095 181.7262 176.2288 170.5899 165.0593 159.9573 155.6378 152.4212 150.5209 150.0024 150.7929Column 37152.7283jiao2 =Columns 1 through 1297.9329 96.9493 96.1177 95.4427 94.9235 94.5564 94.3364 94.2587 94.3188 94.5127 94.8367 95.2869Columns 13 through 2495.8585 96.5454 97.3393 98.2294 99.2013 100.2373 101.3154 102.4095 103.4889 104.5187 105.4597 106.2696Columns 25 through 36106.9048 107.3227 107.4861 107.3682 106.9579 106.2651 105.3223 104.1834 102.9167 101.5959 100.2898 99.0551Column 3797.9329lof =Columns 1 through 12171.3339 162.4831 151.6215 139.2662 125.7535 111.3249 96.2283 80.8029 65.5172 50.9387 37.6489 26.1414Columns 13 through 2416.7408 9.5650 4.5415 1.4741 0.1412 0.3882 2.1781 5.5874 10.7654 17.8808 27.0707 38.3902Columns 25 through 3651.7607 66.9223 83.4132 100.6062 117.8015 134.3068 149.4275 162.3850 172.2940 178.3195 179.9923 177.4473Column 37171.3339w3 =Columns 1 through 122.0420 2.88413.54184.0289 4.3651 4.5686 4.6533 4.6279 4.4965 4.2598 3.9173 3.4690Columns 13 through 242.9187 2.2766 1.5612 0.7980 0.0174 -0.7506 -1.4803 -2.1528 -2.7570 -3.2875 -3.7434 -4.1259Columns 25 through 36-4.4354 -4.6697 -4.8213 -4.8744 -4.8021 -4.5650 -4.1167 -3.4196 -2.4746 -1.3428 -0.1370 1.0209Column 372.0420w2 =Columns 1 through 12-1.4343 -1.1068 -0.8180 -0.5658 -0.3428 -0.1403 0.0504 0.2372 0.4268 0.6248 0.8348 1.0577Columns 13 through 241.2907 1.5265 1.7527 1.95262.1078 2.20042.2158 2.1438 1.9799 1.7238 1.3800 0.9564Columns 25 through 360.4649 -0.0783 -0.6512 -1.2249 -1.7619 -2.2168 -2.5411 -2.6940 -2.6601 -2.4610 -2.1504 -1.7915Column 37-1.4343a3 =Columns 1 through 1252.5560 41.5031 31.2310 22.2213 14.4470 7.6608 1.5603 -4.1325 -9.6312 -15.0579 -20.4136 -25.5519Columns 13 through 24-30.1734 -33.8717 -36.2458 -37.0535 -36.3289 -34.3895 -31.7205 -28.8042 -25.9756 -23.3519 -20.8311 -18.1297Columns 25 through 36-14.8311 -10.4321 -4.3902 3.8075 14.5130 27.6704 42.4330 56.8069 67.8232 72.7326 70.6513 63.0454Column 3752.5560a2 =Columns 1 through 1242.6168 37.6998 32.7111 28.4933 25.3433 23.2851 22.2337 22.0665 22.6383 23.7616 25.1694 26.4765Columns 13 through 2427.1651 26.6283 24.2896 19.7685 13.0154 4.3334 -5.7233 -16.5098 -27.4206 -37.9407 -47.6216 -56.0112Columns 25 through 36-62.5725 -66.6194 -67.2958 -63.6367 -54.7645 -40.2872 -20.8999 1.0456 21.6515 36.8894 44.6857 45.7784Column 3742.6168jiao4 =Columns 1 through 1277.1498 82.2481 87.8236 93.1653 97.6943 100.9570 102.6405 102.6068 100.9154 97.8068 93.6522 88.8959Columns 13 through 2484.0113 79.4692 75.7071 73.0882 71.8537 72.0875 73.7150 76.5391 80.2895 84.6612 89.3256 93.9195Columns 25 through 3698.0213 101.1380 102.7329 102.3311 99.6946 94.9908 88.8525 82.3019 76.5687 72.8043 71.7241 73.3615Column 3777.1498w4 =Columns 1 through 12-3.4249 -4.2204 -4.2959 -3.7606 -2.7325 -1.3398 0.2606 1.8815 3.3352 4.4720 5.1962 5.4568Columns 13 through 245.2293 4.5113 3.3352 1.7918 0.0401 -1.7169 -3.2847 -4.5255 -5.3698 -5.7983 -5.8117 -5.4089Columns 25 through 36-4.5802 -3.3225 -1.6778 0.2193 2.1277 3.7480 4.7881 4.9961 4.2100 2.4944 0.2607 -1.8728Column 37-3.4249vof =Columns 1 through 12-347.0624 -492.8494 -603.7818 -681.3764 -732.8054 -766.8573 -789.4516 -800.4475 -793.1801 -757.7000 -686.9200 -582.3864Columns 13 through 24-455.6459 -323.7142 -201.3442 -95.0327 -1.9924 86.4566 179.8406 284.1862 399.4460 519.0511 631.6416 724.6701Columns 25 through 36788.9608 822.4766 830.9271 823.5243 805.0980 769.5568 700.9268 584.3674 420.0967 225.6063 22.9226 -171.8563Column 37-347.0624aof =1.0e+004 *Columns 1 through 12-0.9048 -0.6847 -0.5221 -0.4123 -0.3300 -0.2449 -0.1309 0.0224 0.2041 0.3874 0.5412 0.6412Columns 13 through 240.6754 0.6479 0.5799 0.5058 0.4597 0.4593 0.4981 0.5531 0.5991 0.6163 0.5913 0.5159Columns 25 through 360.3871 0.2120 0.0106 -0.1886 -0.3676 -0.5349 -0.7184 -0.9361 -1.1628 -1.3170 -1.3111 -1.1438Column 37-0.9048。
大二机械原理课程设计插床matlab
大二机械原理课程设计插床matlab插床是一种常见的金属切削加工设备,广泛应用于制造业中。
在大二机械原理课程设计中,插床的设计与分析是非常重要的。
本文将介绍如何利用MATLAB软件对插床进行设计和分析。
首先,插床的设计需要考虑到多个因素,包括结构、动力学、控制系统等。
在MATLAB中,我们可以利用机械系统仿真工具箱对插床进行建模和仿真。
首先,我们需要确定插床的结构参数,包括床身长度、立柱高度、横梁宽度等。
然后,我们可以利用MATLAB的图形绘制函数,如plot函数,绘制出插床的结构图。
接下来,我们可以利用MATLAB对插床的动力学进行分析。
通过建立插床的运动学方程和动力学方程,我们可以求解插床的速度、加速度等动力学参数。
在MATLAB中,我们可以利用符号计算工具箱或数值计算工具箱对这些方程进行求解。
此外,我们还可以利用MATLAB的绘图函数将插床的速度曲线、加速度曲线等进行可视化展示。
插床的控制系统也是设计中重要的一个部分。
在MATLAB中,我们可以利用控制系统工具箱对插床的控制系统进行建模和分析。
首先,我们需要确定控制系统的输入和输出,如电机输入和位移输出。
然后,我们可以利用传递函数模型对控制系统进行建模,并通过频域分析、时域分析等方法对控制系统的性能进行评估。
此外,MATLAB还提供了许多辅助函数和工具箱,以帮助我们进行插床的设计和分析。
例如,MATLAB中的优化工具箱可以帮助我们进行插床的参数优化,使其达到最佳性能。
另外,MATLAB中的仿真工具箱可以帮助我们进行插床的运动仿真和动力学分析。
总之,通过利用MATLAB软件对插床进行设计和分析,我们可以更好地理解和掌握插床的工作原理和性能特点。
同时,MATLAB提供了丰富的工具和函数,使我们能够更高效地进行插床的设计和分析。
希望本文能对大二机械原理课程设计的插床部分有所帮助。
机械原理课程设计用MATLAB做

机械原理课程设计用MATLAB做一、教学目标本课程旨在通过MATLAB软件的应用,让学生掌握机械原理的基本知识和技能,培养学生的创新意识和实践能力。
知识目标:使学生了解机械原理的基本概念、原理和应用,掌握MATLAB在机械原理分析中的基本使用方法。
技能目标:通过案例分析和实践操作,培养学生运用机械原理知识和MATLAB 软件解决实际问题的能力。
情感态度价值观目标:激发学生对机械原理和MATLAB软件应用的兴趣,培养学生的团队协作精神和自主学习能力。
二、教学内容本课程的教学内容主要包括机械原理的基本概念、机构和机器的设计与分析方法,以及MATLAB在机械原理分析中的应用。
教学大纲安排如下:1.机械原理概述:介绍机械原理的基本概念、研究对象和内容。
2.机构分析:讲解各种机构的工作原理和特性,包括齿轮机构、连杆机构等。
3.机器的设计与分析:介绍机器的设计方法和步骤,以及在不同工作条件下机器的性能分析。
4.MATLAB在机械原理分析中的应用:讲解MATLAB软件的基本使用方法,以及如何利用MATLAB进行机械原理分析和设计。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式,包括讲授法、案例分析法、实验法和讨论法。
1.讲授法:通过讲解机械原理的基本概念和理论知识,使学生掌握基本原理和方法。
2.案例分析法:通过分析实际案例,让学生了解机械原理在工程中的应用,培养学生的实践能力。
3.实验法:让学生动手操作,利用MATLAB软件进行机械原理分析和设计,提高学生的实际操作能力。
4.讨论法:学生进行分组讨论,培养学生的团队协作精神和批判性思维。
四、教学资源为了支持本课程的教学内容和教学方法,我们将准备以下教学资源:1.教材:《机械原理》,提供机械原理的基本知识和理论。
2.参考书:《MATLAB教程》,介绍MATLAB软件的基本使用方法。
3.多媒体资料:包括教学PPT、视频教程等,辅助学生理解和掌握知识。
牛头刨床matlab程序 机械原理课程设计
clear all;clc;%初始条件theta1=linspace(-18,342,100);%单位度theta1=theta1*pi/180;%转换为弧度制W1=80*pi/30;%角速度单位rad/sH=0.5;%行程单位mL1=0.1329;%O2A的长度单位mL3=0.8091;%O3B的长度单位mL4=0.2589;%BF的长度单位mL6=0.430;%O2O3的长度单位mL6u=0.7893;%O3D的长度单位mZ=pi/180;%角度与弧度之间的转换dT=(theta1(3)-theta1(2))/W1;%时间间隔for j=1:100t(j)=dT*(j-1);%时间因素end%求解S3、Theta3、Theta4和SE四个变量theta3(i)=atan((L6+L1*sin(theta1(i)))/L1/cos(theta(i))); for i=1:100S3=L1*cos(theta1(i))/cos(theta3(i));theta4(i)=asin((L6u-L3*sin(theta3(i)))/L4);SE(i)=L3*cos(theta3(i))+L4*cos(theta4(i));end%求解完成%求解完成%求解VS3、W3、W4和VE四个变量for i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1; 0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);K=J*W1*[-L1*sin(theta1(i));L1*cos(theta1(i));0;0]; VS3(i)=K(1);W3(i)=K(2);W4(i)=K(3);VE(i)=K(4);end%求解完成%求解aS3、a3、a4、aE四个变量for i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1; 0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);P=W1*[-L1*cos(theta1(i));L1*sin(theta1(i));0;0];M=[-W3(i)*sin(theta3(i)),-VS3(i)*sin(theta3(i))-S3(i)*W3(i)*cos(t heta3(i)),0,0;W3(i)*cos(theta3(i)),VS3(i)*cos(theta3(i))-S3(i)*W3(i)*sin(theta3 (i)),0,0;0,-L3*W3(i)*cos(theta3(i)),-L4*W4(i)*cos(theta4(i)),0; 0,-L3*W3(i)*sin(theta3(i)),-L4*W4(i)*sin(theta4(i)),0]; N=[VS3(i);W3(i);W4(i);VE(i)];K=J*(-M*N+P);aS3(i)=K(1);a3(i)=K(2);a4(i)=K(3);aE(i)=K(4);end%求解完成%动态静力分析%初始条件M4=20;M5=3;M6=62;Js4=1.2;Js5=0.025;Fc=1500;Ls4=0.5*L3;Ls5=0.5*L4;%给切削阻力赋值for i=1:100if((abs(SE(1)-SE(i))>0.05*H&&abs(SE(1)-SE(i))<0.95*H)&&(theta1(i) <pi))Fc(i)=1500;elseFc(i)=0;endend%赋值完成%求解平衡力矩J4=Js4+M4*(0.5*L3)*(0.5*L3);%导杆对点O3的转动惯量for i=1:100Ekk(i)=(M6*VE(i)*VE(i)+Js5*W4(i)*W4(i)+M5*VE(i)*VE(i)+J4*W3(i)*W3 (i))/2;%计算总动能enddEkk(1)=Ekk(1)-Ekk(100);%动能的改变量for i=2:100dEkk(i)=Ekk(i)-Ekk(i-1);%动能的改变量endfor i=1:100MM(i)=(dEkk(i)+Fc(i)*abs(VE(i)))/W1;%求平衡力矩end%画图%画运动图figure(1);plot(t,theta3,'r');hold on;plotyy(t,theta4,t,SE);grid on;xlabel('时间t/s');ylabel('theta3、theta4(rad)');title('角度Theta3、theta4和位移SE');axis([ 0 , 0.75,-0.2,2]);figure(2);plot(t,W3,'r');hold on;grid on;plotyy(t,W4,t,VE);xlabel('时间t/s');ylabel('W3、W4(rad/s)');title('角度速度W3、W4和速度VE');axis([0 , 0.75,-5,3]);figure(3);plot(t,a3,'r');hold on;plotyy(t,a4,t,aE);grid on;xlabel('时间t/s');ylabel('a3、a4(rad/s/s)');title('角度加速度a3、a4和加速度aE');axis([0 , 0.75,-80,80]);%运动图画完%画反力图figure(4);plotyy(theta1,Fc,theta1,SE);xlabel('Theta1(时间t)');ylabel('Fc');axis([theta1(1) ,theta1(100),-50,1500]);title('切削阻力Fc与位移SE');grid on;figure(5);plotyy(theta1,MM,theta1,Fc);xlabel('Theta1(时间t)');ylabel('力矩');axis([theta1(1) ,theta1(100),-50,300]);title('平衡力矩');grid on;figure(6);plotyy(theta1,Ekk,theta1,SE);xlabel('Theta1(时间t)');ylabel('Fc');title('导杆、连杆和刨头的总动能');grid on; theta1(1)theta1(100)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Wjr_main.m%1.输入已知数据clear;l2=0.1605;%AB的长度单位ml4=0.6914;%CD的长度单位ml5=0.2074;%DE的长度单位ml1=0.370;%AC的长度单位ml1p=0.6572;%CF的长度单位momg2=8.378;af2=0;hd=pi/180;du=180/pi;%2.调用子函数abc.m计算牛头刨机构位移,角速度,角加速度for n1=1:689;tt2(n1)=-0.4488+(n1-1)*hd;ll=[l2,l4,l5,l1,l1p];[tt,omg,af]=abc(tt2(n1),omg2,af2,ll);s4(n1)=tt(1);tt4(n1)=tt(2);tt5(n1)=tt(3);sE(n1)=tt(4);v34(n1)=omg(1);omg4(n1)=omg(2);omg5(n1)=omg(3);vE(n1)=omg(4);a3(n1)=af(1);af4(n1)=af(2);af5(n1)=af(3);aE(n1)=af(4);end%3.位移,角速度,角加速度figure(1);n1=1:689;t=(n1-1)*pi/180;subplot(2,2,1); %绘角位移及位移线图plot(t,tt4*du,'r-.');grid on;hold on;axis auto;[haxes,hline1,hine2]=plotyy(t,tt5*du,t,sE);grid on;hold on;xlabel('时间/份');axes(haxes(1));ylabel('角位移/\circ');axes(haxes(2));ylabel('位移/m');hold on;grid on;text(1.15,-0.65,'tt_4');text(3.4,0.27,'tt_5');text(2.25,-0.15,'s_E');subplot(2,2,2); %绘角速度及速度线图plot(t,omg4,'r-.');grid on;hold on;axis auto;[haxes,hline1,hline2]=plotyy(t,omg5,t,vE); grid on;hold on;xlabel('时间/份')axes(haxes(1));ylabel('角速度/rad\cdots^{-1}')axes(haxes(2));ylabel('速度/m\cdots^{-1}')hold on;grid on;text(3.1,0.35,'\omg_4')text(2.1,0.1,'\omg_5')text(5.5,0.45,'v_E')subplot(2,2,3); %绘角加速度和加速度图plot(t,af4,'r-.');grid on;hold on;axis auto;[haxes,hline1,hline2]=plotyy(t,af5,t,aE); grid on;hold on;xlabel('时间/份')axes(haxes(1));ylabel('角加速度/rad\cdots^{-2}')axes(haxes(2));ylabel('加速度/m\cdots^{-2}')hold on;text(1.5,0.3,'\af_4')text(3.5,0.51,'\af_5')text(1.5,-0.11,'a_E')wjr_abc.mfunction[tt,omg,af]=abc(tt2,omg2,af2,ll)l2=ll(1);l4=ll(2);l5=ll(3);l1=ll(4);l1p=ll(5);%1.计算角位移和线位移s4=sqrt((l2*cos(tt2))*(l2*cos(tt2))+(l1+l2*sin(tt2))*(l1+l2*sin(tt2))); tt4=acos((l2*cos(tt2))/s4);tt5=asin((l1p-l4*sin(tt4))/l5);sE=l4*cos(tt4)+l5*cos(tt5);tt(1)=s4;tt(2)=tt4;tt(3)=tt5;%2.计算角速度和线速度A=[cos(tt4),-s4*sin(tt4),0,0; %速度分析矩阵之从动件位置参数矩阵sin(tt4),s4*cos(tt4),0,0;0,-l4*sin(tt4),-l5*sin(tt5),-1;0,l4*cos(tt4),l5*cos(tt5),0];B=[-l2*sin(tt2); %原动件位置参数矩阵l2*cos(tt2);0;0];omg=A\(omg2*B);v34=omg(1);omg4=omg(2);omg5=omg(3);vE=omg(4);%计算角加速度和加速度A=[cos(tt4),-s4*sin(tt4),0,0; %速度分析矩阵之从动件位置参数sin(tt4),s4*cos(tt4),0,0;0,-l4*sin(tt4),-l5*sin(tt5),-1;0,l4*cos(tt4),l5*cos(tt5),0];At=[-omg4*sin(tt4),-v34*sin(tt4)-s4*omg4*cos(tt4),0,0;omg4*cos(tt4),v34*cos(tt4)-s4*omg4*sin(tt4),0,0;0,-l4*omg4*cos(tt4),-l5*omg5*cos(tt5),0;0,-l4*omg4*sin(tt4),-l5*omg5*sin(tt5),0];Bt=[-l2*omg2*cos(tt2);-l2*omg2*sin(tt2);0;0];af=A\(-At*omg+omg2*Bt);a34=af(1);af4=af(2);af5=af(3);aE=af(4);wjr_force.m%1.输入已知数据clear;l2=0.1605;%AB的长度单位ml4=0.6914;%CD的长度单位ml5=0.2074;%DE的长度单位ml1=0.370;%AC的长度单位ml1p=0.6572;%CF的长度单位momg2=8.378;%单位rad/shd=pi/180;du=180/pi;H=0.6;%行程单位msEmax=0.5046; sEmin=0.0954;%单位mJs4=0.9; Js5=0.015;%单位kgm^2g=9.8;%单位m/s^2m4=22; m5=3; m6=52;%kgG4=196; G5=29.4; G6=509.6;%单位NFc=1400;%2.机构运动分析% 位移及角位移for n1=1:689;tt2(n1)=-0.4488+(n1-1)*hd;s4(n1)=sqrt((l2*cos(tt2(n1)))*(l2*cos(tt2(n1)))+(l1+l2*sin(tt2(n1)))*(l1+l2 *sin(tt2(n1))));tt4(n1)=acos((l2*cos(tt2(n1)))/s4(n1));tt5(n1)=asin((l1p-l4*sin(tt4(n1)))/l5);sE(n1)=l4*cos(tt4(n1))+l5*cos(tt5(n1));end%2.计算角速度和线速度for n1=1:689;A=[cos(tt4(n1)),-s4(n1)*sin(tt4(n1)),0,0; %速度分析矩阵之从动件位置参数sin(tt4(n1)),s4(n1)*cos(tt4(n1)),0,0;0,-l4*sin(tt4(n1)),-l5*sin(tt5(n1)),-1;0,l4*cos(tt4(n1)),l5*cos(tt5(n1)),0];B=[-l2*sin(tt2(n1)); %原动件位置参数矩阵l2*cos(tt2(n1));0;0];omg=A\(omg2*B);v34(n1)=omg(1);omg4(n1)=omg(2);omg5(n1)=omg(3);vE(n1)=omg(4);%计算角加速度和加速度A=[cos(tt4(n1)),-s4(n1)*sin(tt4(n1)),0,0; %速度分析矩阵之从动件位置参数sin(tt4(n1)),s4(n1)*cos(tt4(n1)),0,0;0,-l4*sin(tt4(n1)),-l5*sin(tt5(n1)),-1;0,l4*cos(tt4(n1)),l5*cos(tt5(n1)),0];At=[-omg4(n1)*sin(tt4(n1)),-v34(n1)*sin(tt4(n1))-s4(n1)*omg4(n1)*cos(tt4(n1)),0,0;omg4(n1)*cos(tt4(n1)),v34(n1)*cos(tt4(n1))-s4(n1)*omg4(n1)*sin(tt4(n1 )),0,0;0,-l4*omg4(n1)*cos(tt4(n1)),-l5*omg5(n1)*cos(tt5(n1)),0;0,-l4*omg4(n1)*sin(tt4(n1)),-l5*omg5(n1)*sin(tt5(n1)),0];Bt=[-l2*omg2*cos(tt2(n1));-l2*omg2*sin(tt2(n1));0;0];af=A\(-At*omg+omg2*Bt);a34(n1)=af(1);af4(n1)=af(2);af5(n1)=af(3);aE(n1)=af(4);end%3.机构的力平衡计算for n1=1:689;%计算各铰链点坐标xa=0;ya=l1;xb(n1)=l2*cos(tt2(n1));yb(n1)=l1+l2*sin(tt2(n1));xc=0;yc=0;xd(n1)=l4*cos(tt4(n1));yd(n1)=l4*sin(tt4(n1));xe(n1)=sE(n1);ye=l1p;%计算各质心坐标xs4(n1)=(xc+xd(n1))/2;ys4(n1)=(yc+yd(n1))/2;xs5(n1)=(xd(n1)+xe(n1))/2;ys5(n1)=(yd(n1)+ye)/2;xs6=0.15;%各质心点加速度as4x(n1)=-l4*(af4(n1)*sin(tt4(n1))+omg4(n1)^2*cos(tt4(n1)))/2;as4y(n1)=l4*(af4(n1)*cos(tt4(n1))-omg4(n1)^2*sin(tt4(n1)))/2;adx=-l4*(af4(n1)*sin(tt4(n1))+omg4(n1)^2*cos(tt4(n1)));ady=l4*(af4(n1)*cos(tt4(n1))-omg4(n1)^2*sin(tt4(n1)));as5x(n1)=adx+l5*(af5(n1)*sin(tt5(n1))+omg5(n1)^2*cos(tt5(n1)))/2; as5y(n1)=ady+l5*(af5(n1)*cos(tt5(n1))-omg5(n1)^2*sin(tt5(n1)))/2; as6(n1)=aE(n1);%惯性力及惯性力矩F4x(n1)=-m4*as4x(n1);F4y(n1)=-m4*as4y(n1);F5x(n1)=-m5*as5x(n1);F5y(n1)=-m5*as5y(n1);F6(n1)=-m6*as6(n1);M4(n1)=-Js4*af4(n1);M5(n1)=-Js5*af5(n1);%未知力系数矩阵xya=zeros(15);xya(1,2)=-1;xya(1,4)=-1;xya(2,3)=-1;xya(2,5)=-1;xya(3,1)=1;xya(3,4)=yb(n1)-ya;xya(3,5)=xa-xb(n1);xya(4,4)=1;xya(4,6)=-1;xya(5,5)=1;xya(5,7)=-1;xya(6,6)=cos(tt4(n1));xya(6,7)=sin(tt4(n1));xya(7,6)=1; xya(7,8)=-1;xya(7,10)=-1;xya(8,7)=1;xya(8,9)=-1;xya(8,11)=-1;xya(9,6)=ys4(n1)-yb(n1);xya(9,7)=xb(n1)-xs4(n1);xya(9,8)=yc-ys4(n1); xya(9,9)=xs4(n1)-xc;xya(9,10)=yd(n1)-ys4(n1);xya(9,11)=xs4(n1)-xd(n1);xya(10,10)=1;xya(10,12)=-1;xya(11,11)=1;xya(11,13)=-1;xya(12,10)=ys5(n1)-yd(n1); xya(12,11)=xd(n1)-xs5(n1);xya(12,12)=ye-ys4(n1);xya(12,13)=xs5(n1)-xe(n1);xya(13,12)=1;xya(14,13)=1;xya(14,14)=-1;xya(15,13)=xs6;xya(15,15)=1;%已知力矩阵if vE(n1)<0&sE(n1)>=(sEmin+0.05*H)&sE(n1)<=(sEmax-0.05*H)D=[0;0;0;0;0;0;-F4x(n1);-F4y(n1)+G4;-M4(n1);-F5x(n1);-F4y(n1)+G5;-M5( n1);-Fc-F6(n1);G6;0;];elseD=[0;0;0;0;0;0;-F4x(n1);-F4y(n1)+G4;-M4(n1);-F5x(n1);-F4y(n1)+G5;-M5( n1);-F6(n1);G6;0;];end%未知力矩阵FR=inv(xya)*D;M2(n1)=FR(1);FR12x(n1)=FR(2);FR12y(n1)=FR(3);FR45x(n1)=FR(10);FR45y(n1)=FR(11);FR16(n1)=FR(14);M6(n1)=FR(15);end%4.输出力的分析图figure(2);n1=1:689;t=(n1-1)*2*pi/360;subplot(2,2,1); %绘平衡力矩图plot(t,M2);grid on;hold on;axis auto;title('平衡力矩M_2')xlabel('时间/份');ylabel('力矩/N\cdotm');hold on;grid on;text(3.8,880,'M_2');subplot(2,2,2); %绘A处x方向约束反力即FR12x plot(t,FR12x,'-');grid on;hold on;axis auto;title('转动副A处约束反力')xlabel('时间/份');ylabel('力/N');hold on;grid on;text(1.1,5000,'F_R_1_2_x')plot(t,FR12y,'r-.'); %绘A处y方向约束反力即FR12y grid on;hold on;text(1.1,-3000,'F_R_1_2_y')subplot(2,2,3); %绘移动副FR16plot(t,-FR16);grid on;hold on;axis auto;title('移动副6约束反力F_R_1_6')xlabel('时间/份')ylabel('力/N')grid on;hold on;text(1.5,3100,'F_R_1_6')subplot(2,2,4); %绘转动副D处约束反力plot(t,FR45x,'-');grid on;hold on;axis auto;title('转动副D处约束反力')xlabel('时间/份')ylabel('力/N')grid on;hold on;text(1.1,-900,'F_R_4_5_x')plot(t,FR45y,'r-.');grid on;hold on;text(1.1,-3700,'F_R_4_5_y')。