简易3D打印机结构设计
3D打印模型的支撑结构设计技巧

3D打印模型的支撑结构设计技巧3D打印技术的发展日新月异,越来越多的人开始尝试使用3D打印机制作模型。
然而,很多人在设计模型的支撑结构时遇到了困难。
本文将介绍一些3D打印模型的支撑结构设计技巧,帮助读者更好地完成自己的作品。
首先,我们需要了解什么是支撑结构。
在3D打印过程中,由于打印材料的特性,一些悬空部分或者细小的结构很难保持稳定。
这时,我们需要设计一些支撑结构来支撑这些部分,以确保模型的完整性。
一种常见的支撑结构设计技巧是使用框架结构。
框架结构是指使用一系列的横向和纵向的支撑杆来支撑模型的悬空部分。
这种结构可以提供足够的支撑力,同时又不会对模型的外观产生太大的影响。
在设计框架结构时,需要考虑支撑杆的数量和位置,以及它们与模型的连接方式。
合理地设计框架结构可以使模型的支撑结构更加均匀,减少打印过程中的变形和失真。
除了框架结构,还有一种常见的支撑结构设计技巧是使用螺旋结构。
螺旋结构是指将支撑杆以螺旋状绕着模型的悬空部分布置。
这种结构可以提供更大的支撑面积,增加模型的稳定性。
在设计螺旋结构时,需要考虑支撑杆的间距和角度,以及它们与模型的连接方式。
合理地设计螺旋结构可以使模型的支撑结构更加紧密,减少打印过程中的松动和晃动。
除了以上两种常见的支撑结构设计技巧,还可以根据模型的具体形状和需求进行创新设计。
例如,对于一些有规则几何形状的模型,可以使用网格结构来支撑。
网格结构是指将支撑杆以网格状布置在模型的悬空部分。
这种结构可以提供更大的支撑面积,同时又不会对模型的外观产生太大的影响。
在设计网格结构时,需要考虑支撑杆的形状和大小,以及它们与模型的连接方式。
合理地设计网格结构可以使模型的支撑结构更加均匀,减少打印过程中的变形和失真。
在进行支撑结构设计时,还需要考虑一些其他因素。
首先,需要根据模型的大小和复杂度来确定支撑结构的密度和强度。
一般来说,模型越大或者越复杂,支撑结构的密度和强度就需要相应增加。
其次,需要考虑支撑结构与模型的分离方式。
小型化智能3D打印机设计

四、设计思路
通过以上设计思路的实现,我们可以开发出一款小型化、智能化的3D打印机, 以满足不断发展的制造业和个人用户的需求。这款打印机将具有更高的便携性、 自动化程度和打印效率,为用户带来更加便捷、高效、创新的打印体验。
五、结论
五、结论
本次演示通过对小型化、智能化的3D打印机设计的探讨,提出了一款方便携 带、自动化程度高、打印效率高的新型打印机设计方案。该方案结合了3D打印机 的优势和现代技术,解决了传统打印机的不足之处,具有很高的实用性和创新性。 随着技术的不断发展和完善,相信未来的3D打印机将在更多领域得到广泛应用和 发展。
内容摘要
总结全文,便携式3D打印机设计是一个充满挑战和机遇的领域。通过设计师 的不懈努力和研究,我们相信未来便携式3D打印机将会更加普及,成为人们生活 和工作中不可或缺的一部分。它不仅可以提高我们的工作效率,还可以帮助我们 更好地实现个人创意和想法。随着技术的不断发展,我们相信便携式3D打印机的 设计和功能将会越来越完善,为我们带来更加美好的未来。
内容摘要
那么,如何逐步展开这个情节呢?首先,我们可以从设计师的角度出发,探 讨如何将便携性作为设计的核心要素。然后,可以研究一些新的设计理念和材料, 例如采用碳纤维材料增强打印机的耐用性,或使用视觉控制系统来提高打印精度。 此外,还可以探讨如何提高打印效率,例如采用多喷嘴打印头、自动换平台等技 术。
3、打印出的物品表面可能较为 粗糙,需要进一步处理。
四、设计思路
四、设计思路
综合考虑以上因素,我们可以提出以下设计思路: 1、整体结构:采用可拆卸式结构,便于携带和存放。同时,考虑到模块化的 需求,可以设计成多个子模块,根据需要组合在一起。
四、设计思路
2、电路设计:采用智能控制系统,实现打印过程中的自动化控制。同时,引 入互联网远程控制功能,方便用户远程操作。
3D打印机的设计资料
3D打印机总体方案及结构设计题目:3D打印机设计专业班级机械电子工程1班届次2013届学生姓名揭硕学号指导教师二O一六年十月十二日一、总体框架的设计系统概述系统由输人设备制定部分参数,从存储设备或者直接从计算机中得到事先建好的三维模型,由单片机对模型进行分析,切片,建立必要的支撑结构,再从单片机输出控制指令,控制喷头型材料融化,并通过一定的驱动电路驱动电机,带动喷头进行X、Y、Z三个方向的移动,并控制喷头的喷出系统调节喷出材料的多少。
每打好一层,从外部设备读取下一层的参数,再打印下一层,直到全部模型完成。
完成模型的打印之后,还需要后期的材料回收工作。
系统框架输入设备、存储外设、上位机、温度传感器的测量值----单片机分析----温度控制回路、XYZ各方向电机控制、喷出量控制、显示设备打印耗材的选用为了实现 3 D打印机的功能,所选材料也很重要。
既要由较低的熔点,也要有较好的粘滞性,同时也需要快速成型。
综合考虑,我们最终选择了P L AA /B S耗材。
设计思路概述ABS/PLA耗材熔点为230℃左右,分解温度260℃以上,故其通常成型温度在250℃以下。
控制回路使用温度传感器返回当前温度,反馈回路保证了温度保持恒定,控制器统一使用了单片机来输出指令(3)控制回路方框图如下:设置的空气温度→单片机→D/A转换器→加热电路→当前温度→温度传感器→A/D转换器→单片机x y z三方向控制电机的设计采用化繁为简的思路,将三维打印转化为二维进而转化为一维打印。
即Z方向采用步进电机,由步进电机固定的给量算出所需的步进角,用这种方式将三维打印先转化为每一平面内的二维打印,再由Y方向也为步进电机带动,则每一平面内的二维打印又转化为很多条直线上的一维打印。
喷头移动及喷出量调节的设计熔融挤出系统对喷头系统的基本要求是:将成型料丝送人液化器中,在其中及时而充分地熔化,由固态变为熔融态,然后再进一步从更小直径的喷嘴中以极细丝状挤出,按扫描路径堆积成型。
3D打印模型的支撑结构设计方法

3D打印模型的支撑结构设计方法3D打印技术在近年来得到了快速发展,成为了制造业中的一项重要技术。
而在3D打印过程中,支撑结构的设计是非常关键的一步,它直接影响着打印模型的质量和稳定性。
本文将介绍一些常用的3D打印模型支撑结构设计方法。
首先,我们需要了解什么是支撑结构。
在3D打印过程中,由于打印材料的特性,一些悬空或者细小的部分容易出现变形或者塌陷的情况。
为了解决这个问题,我们需要在打印模型上添加一些支撑结构,以增加模型的稳定性和完整性。
一种常用的支撑结构设计方法是使用网格结构。
网格结构是由一系列交叉的线条组成的,可以有效地支撑模型的悬空部分。
在设计网格结构时,需要考虑到支撑结构的密度和粗细。
密度过大会增加打印时间和材料消耗,而密度过小则可能导致模型不稳定。
粗细的选择则需要根据模型的大小和形状来决定,一般来说,细小的模型需要更细的支撑结构。
除了网格结构,还有一种常见的支撑结构设计方法是使用柱状结构。
柱状结构是由一系列垂直的柱子组成的,在支撑模型的同时,还能够提供额外的稳定性。
柱状结构的设计需要考虑到柱子的直径和间距。
直径过大会增加材料消耗,而直径过小则可能导致支撑结构不够稳定。
间距的选择则需要根据模型的大小和形状来决定,一般来说,较大的模型需要更密集的支撑结构。
除了以上两种常见的支撑结构设计方法,还有一些其他的设计方法可以用于特殊情况。
比如,当模型的表面需要保持平整时,可以使用平面支撑结构。
平面支撑结构是由一系列平面组成的,可以有效地支撑模型的表面,防止其变形。
另外,当模型的内部需要支撑时,可以使用填充结构。
填充结构是由一系列填充物组成的,可以填充模型的内部空间,增加其稳定性。
在进行支撑结构设计时,还需要考虑到一些其他的因素。
比如,支撑结构的位置和角度需要根据模型的形状和悬空部分的位置来确定。
另外,支撑结构的连接方式也需要考虑到打印材料的特性,以确保支撑结构和模型的连接牢固。
总之,3D打印模型的支撑结构设计是非常重要的一步,它直接影响着模型的质量和稳定性。
3D打印中常见的支撑结构设计方法

3D打印中常见的支撑结构设计方法在3D打印中,支撑结构的设计是非常重要的一步。
支撑结构可以保证打印出的物体在打印过程中保持稳定,并避免发生变形或倾斜。
本文将介绍一些常见的3D打印支撑结构设计方法,以帮助您更好地进行设计和打印。
一、树状支撑结构方法树状支撑结构是一种常见的支撑设计方法。
该方法依靠多个分支支撑物体,使得物体能够在打印过程中保持稳定。
这种支撑结构具有简单、易撤除的优点,适用于大多数3D打印机。
当打印完成后,只需要用剪刀或其他工具将支撑物体修剪或撕除即可。
为了设计树状支撑结构,您可以使用3D打印软件中的支撑生成工具。
在选择生成支撑结构的位置时,通常应选择物体的底部或悬空部分。
并且,您还可以调整支撑结构的密度和支撑物体的尺寸,以满足您的需求。
二、网状支撑结构方法另一种常见的支撑结构设计方法是网状支撑结构。
与树状支撑结构不同,网状支撑结构采用蜂窝状的形式,将支撑物体均匀分布在整个打印物体的表面上。
这样可以提供更好的支撑效果,避免物体在打印过程中发生倾斜或变形。
为了设计网状支撑结构,您可以使用3D打印软件中的网状支撑生成工具。
在生成支撑结构时,您可以选择网格的形状和大小,以及支撑物体的密度等参数。
这样可以根据物体的特性和打印机的要求进行调整,以获得最佳的打印效果。
三、自定义支撑结构方法除了树状和网状支撑结构外,还可以根据具体需要进行自定义支撑结构的设计。
这种方法通常适用于具有复杂形状或特殊要求的物体。
您可以使用3D建模软件或3D打印软件中的支撑结构定制工具来创建自定义的支撑结构。
在设计自定义支撑结构时,您可以根据物体的形状和支撑需求来决定支撑物体的形状、数量和位置等参数。
此外,还可以考虑打印的材料和打印机的特点,以确保设计的支撑结构能够满足需求。
综上所述,3D打印中常见的支撑结构设计方法包括树状支撑结构、网状支撑结构和自定义支撑结构。
这些方法能够在打印过程中提供稳定的支撑,避免物体变形或倾斜。
3d打印机设计方案

3d打印机设计方案一、设计背景随着科技的发展和应用需求的增加,3D打印技术逐渐受到广泛关注和应用。
为了满足市场需求,我们设计了一款全新的3D打印机,旨在提供高效、稳定、精准的打印服务。
二、技术原理我们的3D打印机采用了先进的光固化技术,结合了高精度的定位系统和精密的打印喷头,实现了快速而准确的打印。
具体的工作原理如下:1. 光固化技术:我们的打印机利用紫外线光源对特殊光敏树脂进行瞬间固化,实现逐层打印的过程。
通过在每一层打印之前,将树脂逐层涂覆到打印平台上,并使用紫外线光源照射,使树脂在光线的作用下固化。
这种技术能够实现高精度的打印,并且打印速度较快。
2. 定位系统:我们的打印机采用了精准的定位系统,保证3D模型在打印过程中的准确位置。
通过使用高精度的传感器和稳定的控制系统,我们能够实现零误差的打印定位,确保打印的每一个细节都精准到位。
3. 打印喷头:我们的打印机配备了高精度的打印喷头,能够根据不同的需要进行自动调整。
喷头具有多个喷孔,可以同时进行多项工作,提高打印效率。
此外,喷头具有一定的移动能力,可以根据需求进行精确定位,确保打印的过程平稳而准确。
三、设计特点我们的3D打印机具有以下特点:1. 高效:采用先进的光固化技术,打印速度快,效率高。
省去了传统3D打印所需的层层堆积,大大缩短了打印时间。
2. 稳定:精准的定位系统和稳定的控制系统,保证打印过程平稳无误。
能够处理复杂的打印任务,同时兼顾精度和速度。
3. 精准:高精度的打印喷头和定位系统,能够实现细节精准到位的打印。
打印出来的模型具有良好的表面质量和精细度。
4. 易操作:我们的打印机采用了简洁的用户界面,操作简单方便。
用户只需要按照提示进行操作,即可快速完成打印任务。
5. 可定制化:我们的3D打印机支持多种材料打印,用户可以根据需要选择适合的材料进行打印。
同时,我们也提供了丰富的打印模板和模型库,用户可以根据自己的需求选择合适的模型进行打印。
3D打印机主要结构组成部件介绍

3d打印机主要结构组成部件介绍
3d打印机在整个系统中,主要系统是通过机械、控制及计算机技术等为一体的机电一体化系统;主要部件有:X-Y-Z 运动系统、喷头结构、数控模块、成型环境模块等组成;
X-Y-Z 运动是3D打印机进行三维制件的基本条件;X-Y 轴组成平面扫描运动框架,由伺服电机驱动控制喷头的扫描运动;Z 轴由伺服电机驱动控制工作台做垂直于X-Y 平面的运动;扫描机构具有良好的随动性几乎不受载荷,但运动速度较高,具有运动的惯性;Z 轴应具备一定的承载能力和运动平稳性;因此,在系统中,X 轴机构选用导轨---同步齿形带;Y 轴机构选用光杆---同步齿形带;Z 轴机构选用扭矩力较大的伺服电机驱动装置杆;
1成型工作缸:在缸中完成零件加工,工作缸每次下降的距离即为层厚;零件加工完后,缸升起,以便取出制造好的工件,并为下一次加工做准备;工作缸的升降由伺服电动机通过滚珠丝杆驱动;
2供料工作缸:提供成型与支撑粉末材料;
3余料回收袋:安装在成型机壳内,回收铺粉时多余的粉末材料;
4铺粉辊装置:包括铺粉辊及其驱动系统;其作用是把粉末材料均匀地铺平在工作缸上,并在铺粉的同时把粉料压实;
5喷头:在工作缸内喷射成型时的粘接剂,粘接不同层之间的粉料,是三维打印快速成型的关键部件;
6X-Y-Z三维传动系统:带动喷头小车在X,Y方向做二维平面运动,驱动成型工作缸和供料工作缸在Z轴方向做上下运动;
7机身和机壳:机身和机壳给整个快速成型系统提供机械支撑和所需的工作环境;。
3D打印设备机械机构设计
3D打印设备机械机构设计摘要基于 FDM 技术的3D 打印已逐渐发展成为一种新的主流加工技术。
与传统制造技术不同, 基于 FDM 技术的3D 打印机可以降低复杂零件的制造难度、操作方便、成本低、印刷材料来源广泛等特点。
然而, 它也面临许多困难和挑战。
特别是在成形精度、印刷速度和新材料的研发等方面, 还有待研究。
因此, 3D 打印技术的发展和推广仍有广阔的空间。
针对现有的基于 FDM 技术的三维打印机的低打印效率和成形精度差等缺点, 分析了三维打印机的工作原理, 并根据目前的结构设计了一种三喷嘴3D 打印机。
对其机械结构进行了设计和改进。
根据不同的分工, 将三维打印机分为挤出机构、送丝机构、传动机构、散热结构、伺服系统、温控系统等。
设计了送丝机构的布置方案。
针对喷嘴直径的不同, 采用近端送丝与远端送丝相结合的送丝方法, 降低了挤出机构的重量, 提高了印刷速度。
改进环形散热器的结构, 选择散热器数量、长度、高度等参数的最佳组合, 增加散热, 解决喷水器印刷堵塞的问题。
分析了三维打印机轴承部件的强度和刚度, 并对机械结构的可行性进行了测试。
对喷嘴内流体的实际运动进行了模拟, 验证了三喷嘴挤出机构的可行性和喷嘴的结构设计。
研究了三维打印机的温度控制系统, 以确保工作过程的稳定性。
绘制了传统PID 控制和模糊PID 控制的响应曲线, 并对它们进行了比较。
选择了一种更合适的控制算法, 使温度控制更加准确。
通过对基于 FDM 技术的三维打印机结构设计与控制系统的研究, 可以提高送丝的丝堵塞、唾液和动力不足等问题, 同时提高印刷精度和印刷速度。
基于FDM 技术的3D 打印机的设计通过对设计的3D 打印机进行了多项打印样品的测试, 满足了设计要求, 为以后的3D 打印机开发提供了参考, 具有较高的精度和效率。
关键词:FDM ; 3D 打印机;挤出机构Abstract3D printing based on FDM technology has gradually developed into a new mainstream processing technology. Different from traditional manufacturing technology, 3D printer based on FDM technology can reduce the manufacturing difficulty of complex parts, convenient operation, low cost and wide source of printing materials. However, it also faces many difficulties and challenges. Especially in the forming accuracy, printing speed and new material research and development, etc. Therefore, there is still a broad space for the development and promotion of 3D printing technology. Aiming at the disadvantages of existing 3D printers based on FDM technology, such as low printing efficiency and poor forming accuracy, this paper analyzes the working principle of 3D printers, and designs a 3D printer with three nozzles according to the current structure. Its mechanical structure was designed and improved. According to the different division of labor, the 3d printer is divided into extrusion mechanism, wire feeding mechanism, transmission mechanism, heat dissipation structure, servo system, temperature control system, etc. The layout of wire feeding mechanism is designed. According to the different diameter of the nozzle, the method of feeding the near end wire and the far end wire is adopted to reduce the weight of the extrusion mechanism and improve the printing speed. Improve the structure of the ring radiator, choose the best combination of the number, length, height and other parameters of the radiator, increase the heat dissipation, and solve the problem of blocking the printing of the sprinkler. The strength and stiffness of 3d printer bearing parts are analyzed, and the feasibility of mechanical structure is tested. The actual motion of the fluid in the nozzle is simulated, and the feasibility of the three-nozzle extrusion mechanism and the structure design of the nozzle are verified. The temperature control system of 3d printer is studied to ensure the stability of working process. The response curves of traditional PID control and fuzzy PID control are drawn and compared. A more suitable control algorithm is selected to make the temperature control more accurate. Through the research on the structure design and control system of 3d printer based on FDM technology, the problems such as wire blockage, saliva and。
并联机械手式三维打印机结构设计

本科毕业设计(论文)说明书并联机械手式三维打印机结构设计学院机电工程学院专业班级机械工程及自动化五班学生姓名学生学号指导教师提交日期2014年5月28日毕业设计(论文)评语:毕业设计(论文)总评成绩:毕业设计(论文)答辩小组负责人签字:年月日摘要三维打印技术是集机械、自动控制、计算机科学、材料学等为一体的先进制造技术。
本文首先介绍了三维打印技术的基本原理和特点,以及三维打印技术的发展现状和关键技术。
接着阐述并联机器人的机构原理和特点,还有它的发展国内外发展情况。
然后通过选题背景及设计目的引出如今三维打印机存在的问题,比如成型精度和速度等。
本文是对并联机械手式三维打印的整体结构设计。
着重于机械手的机构的设计,简单性地说明打印机的整体设计。
在机械手的机构设计部分,需要建立运动学模型。
对于机器人的控制系统来说,运动学正解和运动学反解都是不可避免的。
还有一个重要点是并联机器人的尺度综合。
尺度综合是并联机械手设计的重要内容,速度、精度、刚度、工作空间是评价并联机械手系统性能的重要指标。
机械手的机构设计完成后,因为是基于并联机械手的三维打印机,还需要讨论三维打印机的整体设计,这也是为了能将并联机械手和三维打印机很好地结合为一体。
对于部分结构,本文会予以重点讨论。
关键词:三维打印技术,并联机械手,运动学模型,尺度综合AbstractThree-dimensional printing technology is one of the advanced manufacturing technology of machinery, automatic control, computer science, material science etc.. This paper first introduces the basic principle and characteristics of 3D printing technology, as well as 3D printing technology development status and key technology. Then it elaborates the mechanism principle and the characteristic of the parallel robot, and the development of its domestic and foreign development. And then through the background and the design objective leads now 3D printer problems, such as molding speed and precision.This paper is the overall structure design of parallel manipulator type of three-dimensional printing. The design focuses on the manipulator mechanism, the simple description of the overall design of the printer.In the design of manipulator mechanism part, needs to establish the kinematics model. For the control system of robot, kinematics and inverse kinematics is inevitable. Another important point is the synthesis of parallel robot. Synthesis is an important content of design parallel machine, speed, precision, rigidity, the working space is an important index for evaluating the performance of parallel manipulator system.The mechanism of robot design, because it is a 3D printer parallel manipulator based on, also need to discuss the overall design of 3D printers, this is to be the good combination of parallel manipulator and a 3D printer as a whole. For part of the structure, this paper will be focused on.Keywords: 3D printing technology, parallel manipulator, kinematics model, dimension synthesisKey words: Multivariable system, Predictive control, Environmental test device目录摘要................................................................................................................................................ I Abstract .......................................................................................................................................... I I 目录............................................................................................................................................. III 第一章绪论 (1)1.1三维打印机概述 (1)1.1.1桥梁检修的概述 (1)1.1.2应用前景 (1)1.1.3存在的问题 (2)1.2并联机械手综述 (4)1.2.1并联机构的特点 (4)1.2.2并联机构的分类 (5)1.2.3并联机器人的应用 (9)1.2.4发展展望 (11)1.3选题背景及设计目的 (11)1.4选题背景及设计目的 (12)第二章机械手的设计 (13)2.1 设计前分析 (13)2.2 Delta机器人结构分析 (13)2.3动平台位置反解 (15)2.3.1坐标系建立 (15)2.3.2位置反解分析 (16)2.4动平台位置正解 (18)2.5机械手的工作空间 (18)2.6机械手的驱动部分 (20)2.6.1电机选型 (20)2.6.2扭力校验 (20)2.7机械手材料选择 (21)2.7.1主动臂材料选择 (22)2.7.2动平台材料选择 (23)2.7.3静平台材料选择 (24)2.7.4其他部分确定 (25)2.8本章小结 (27)第三章三维打印机其他部分的设计 (28)3.1 支架的设计 (28)3.2送料机构 (29)3.3热平台固定 (30)3.4料架设计 (30)3.5喷头清理设计 (32)3.6防护板设计 (32)3.7本章小结 (34)结论 (35)参考文献 (36)附录.............................................................................................................. 错误!未定义书签。
金属粉末3D打印机的机械结构设计
1、运动学原理:巧克力3D打印机需要精确控制打印头的运动,以确保在打印 过程中不会出现位置偏移。因此,需要研究运动学原理,建立运动学模型,以 实现精确控制。
2、力学原理:巧克力3D打印机的挤出机构需要精确控制巧克力的挤出量,以 实现均匀的打印效果。因此,需要研究力学原理,分析挤出机构的受力情况, 以实现精确控制。
金属粉末3D打印机的机械结构设计
基本内容
随着科技的不断发展,3D打印技术已经广泛应用于各个领域。特别是在金属粉 末打印领域,金属粉末3D打印机越来越受到。机械结构设计在金属粉末3D打印 机中具有举足轻重的地位,直接影响打印质量和打印效率。本次演示将深入探 讨金属粉末3D打印机的机械结构设计。
在了解金属粉末3D打印机的机械结构设计之前,我们首先需要回顾一下金属粉 末3D打印的基本原理和特点。金属粉末3D打印主要是通过激光或其他能量源将 金属粉末逐层熔化,然后层层堆积成实体零件。这种打印技术的优势在于可以 制造出复杂结构的产品,减少零件数量,提高生产效率,降低生产成本。
总之,该新型结构的金属3D打印机为金属制造行业带来了重大的技术突破,且 具有广泛的应用前景。它的出现将极大地促进金属制造行业的发展,并为各行 各业提供更高效、更可靠的生产方式。
FDM工艺引领3D打印机机械结构 设计的新趋势
在当今这个数字化时代,3D打印技术已经成为人们的焦点。其中,FDM (Fused Deposition Modeling)工艺由于其独特的优势,成为了3D打印技 术中备受瞩目的焦点。本次演示将深入探讨基于FDM工艺的3D打印机机械结构 设计。
基本内容
随着科技的不断发展,3D打印技术已经成为了当今制造业的热门话题。其中, 熔融沉积3D打印技术以其独特的优势,逐渐成为了3D打印领域的主流技术之一。 本次演示将主要探讨熔融沉积3D打印机的机械结构设计。
【教程】从零开始DIY搭建3D打印机

【教程】从零开始DIY搭建3D打印机目录1 概要2 准备材料清单3 所需工具4 电路部分组装4.1 知识概要4.1.1 CPU主板4.1.2 电机驱动板4.1.3 温控部分4.1.4 步进电机4.1.5 限位开关4.1.6 加热管4.1.7 电源4.1.8 电源开关4.1.9 液晶控制模块4.1.10 线缆4.1.11 接插件4.2 电路调试4.2.1 步骤1 Mega2560单板运行4.2.2 步骤2 RAMPS1.4电路板小修改4.2.3 步骤3 电路板联合调试4.2.4 步骤4 电路功能测试5 组装外壳5.1 知识概要5.1.1 关于外壳材料选择5.1.2 关于十字支架远程送丝结构5.1.3 关于轴,轴承,轴套的选择5.1.4 关于机械同步传送5.1.5 关于Z平台水平调整5.1.6 关于送料管的选择5.1.7 关于送料管卡口改用气动5.1.8 关于内六角螺丝和沉头螺丝5.2 机器组装5.2.1 XY轴支架组装5.2.2 送料部分组装5.2.3 Z平台5.2.4 外壳面板安装5.2.5 XYZ轴步进电机安装5.2.6 XY轴运动轴安装5.2.7 十字架挤出机安装5.2.8 Z载物平台安装5.2.9 电路安装及布线6 软件6.1 知识概要6.2 软件教程6.2.1 Marlin6.2.2 Arduino IDE6.2.3 Slic3r6.2.4 Printrun6.2.5 Cura7 3D模型设计软件8 效果展示9 整机参数10 注意事项11 购买指南12 鸣谢正当作者想入手一台开源3D打印机时陷入了尴尬境地,大家都说是开源的,可是拿点资料却拿不出手,也有些开源文件是存在问题的。
而有些所谓的DIY套件是可配置程度实在是太低,因此我开始了DIY 自己的3D打印机,从买各种散件到安装调试过程费了不少周折,X宝线上寻觅以及线下机电和电子市场采购,花去的代价却是不少,但是很开心,感谢一路上给予我帮助的人。
3D打印机的机械结构设计
3D打印机的机械结构设计2、中国海洋大学山东省青岛市崂山区摘要:近几年来,为进一步提高制造业产品质量,制造业中广泛使用3D打印设备,该设备的使用,使某些复杂构件的加工效率与质量得到了极大的提高,并在某种程度上打破了传统工艺的局限。
其中,以FDM为代表的3D打印机是一种重要类型,但目前此类设备的进口比重仍很大,亟需加大对其机构设计的研究力度,促进其国产化,以解决技术依赖性问题。
关键词:3D打印机;机械结构;设计1.3D打印机整体机械结构设计1.1.基本结构的确定当前基于FDM工艺的3D打印机存在三种主要的结构形式,包括三角形结构、三角爪式结构和矩形盒式结构,这些结构存在不同的优缺点,根据设计人员综合分析后,最终确定本次设计基于矩形盒式结构进行。
同时在传统矩形盒结构的基础上,考虑到大尺寸零件加工的需要,对结构进行如下改进:(1)该结构的Z轴传动模式调整为双螺纹传动;(2)X,Y十字轴变更为高精度直线模组;(3)应用步进电机为打印机提供动力。
1.2.打印机框架材料的选择考虑到打印机框架的加工便利度和力学性能,本次选择工业铝型材作为打印机框架材料,其抗拉强度约为265MPa。
在此基础上,为提高打印机框架的紧固程度,使用规格为4040角码T型螺栓作为连接件进行紧固。
2.本次3D打印机的运动系统设计2.1.三轴运动方式的分析和确定考虑到本次设计的3D打印机的实际应用方向,在确定成型尺寸的前提下,应当尽可能地缩小整机设备尺寸。
基于此方面的需要,在本次设计中,选择如下运动方式:打印喷头与X-Y平面进行复合运动,而工作平台在Z轴方向上独立运动。
这种三轴运动模式与传统CNC机床结构相类似,在这种模式下,可进行简单紧凑的结构设计,而获得刚度和精度均较高的加工产品。
2.2.工作平台设计在工作平台设计方面,考虑到本次设计的3D打印机有着较为突出的大尺寸特点,因此,为保证大尺寸部件加工时的平整度,并避免加热板受热出现变形,设计人员采用环氧树脂板与硅胶加热片组合的设计模式,取代传统的铝基金属加热板,以实现热稳定性和平整度两项指标的优化。
如何进行3D打印模型的支撑结构设计
如何进行3D打印模型的支撑结构设计3D打印技术的发展使得制造业得以重塑,其中3D打印模型的设计与打印工艺是关键环节。
在进行3D打印模型设计时,支撑结构的设计尤为重要,它可以确保打印过程的顺利进行以及最终模型的稳定性。
本文将介绍如何进行3D打印模型的支撑结构设计。
首先,了解支撑结构的作用是十分必要的。
支撑结构主要用于支撑打印模型,以防止模型在打印过程中出现倾斜、变形甚至部分断裂。
它为模型提供了额外的支撑,保证打印过程中的稳定性与精确度,并且可以防止模型出现悬空部分。
支撑结构的设计需要考虑到模型的几何形状、材料特性以及打印机的能力。
其次,在选择支撑结构类型时需要根据模型的特点来决定。
常见的支撑结构类型有栅格状支撑与线状支撑。
栅格状支撑适用于模型表面光滑、无明显悬空部分的情况,它们可以在模型的空隙中形成细小的方格结构以提供支撑。
线状支撑则适用于模型表面有悬空部分或需要打印的区域有较小间隙的情况,它们类似于细长柱状的支撑结构。
在进行支撑结构设计时,还需要考虑到打印模型的材料选择。
不同材料的打印温度、粘合性以及强度都不同,这将直接影响支撑结构的设计。
比如,某些材料在高温下会软化,而某些材料则需要更高的打印温度才能保持其形状。
因此,我们需要根据材料的特性来选择适当的支撑结构类型和参数。
此外,打印机的能力也是设计支撑结构时需要考虑的因素之一。
不同的打印机具有不同的精度、最小支撑结构尺寸以及打印速度,这将直接影响到支撑结构的细节设计。
在进行支撑结构设计时,需要确保支撑结构可以被打印机准确地识别与建立,以及在打印过程中不容易被损坏或变形。
有些打印机甚至提供了自动支撑结构生成的功能,可以根据模型的特点自动生成最佳的支撑结构设计。
最后,进行3D打印模型的支撑结构设计前,可以使用一些3D建模软件来进行模拟和优化。
这些软件可以帮助我们可视化地调整支撑结构的参数,评估模型的稳定性以及打印的效果。
通过模拟和优化,可以减少试错成本,并确保打印出符合要求的模型。
3D打印技术4.2 3D打印机的主要构造
引入新课 交流研讨 明确任务 知识详解 总结拓展
4.2 3D打印机的主要构造
第三步:安装挤出头、散热片、风扇 对于3D打印机而言,挤出头是其核心的部件。同时在挤出头外加散热片和
风扇,主要是为了降低喉管上部的温度。
引入新课 交流研讨 明确任务 知识详解 总结拓展
第四步:安装加热床
4.2 3D打印机的主要构造
一番“磨难”之后,千元3D打印机终于问世。“第一次只能打印一个简单的正 方体,现在我们已经可以熟练地打印出精巧的摆件、可爱的模型,而且比网络上 ‘秀’的产品更为精致、美观。”两位男生骄傲地说。
引入新课 交流研讨 明确任务 知识详解 总结拓展
4.2 3D打印机的主要构造
引入新课 明确任务 自主学习 交流研讨 全班展示 总结拓展
加热溶化后的塑料丝由喷嘴挤到打印台上,为了减少塑料因温度骤减而发 生翘边和收缩不良的现象,将打印台做成加热床(图4-19),床内有热敏 电阻与电路板相连,来控制加热床的温度。
引入新课 交流研讨 明确任务 知识详解 总结拓展
& 课堂讨论 (时间:10分钟)
4.2 3D打印机的主要构造
1.在了解了3D打印的结构之后,讨论一下你认识的3D打印机的主要包含了哪些结构? 试着说一说你们学校的3D打印机的构造。
4.2 3D打印机的主要构造
3
3D打印机的组装
引入新课 交流研讨 明确任务 知识详解 总结拓展
4.2 3D打印机的主要构造
第一步:制作外部框架结构 FDM型3D打印机的机械部分最为复杂,涉及到的零部件也比较多。要制
作一台完整的FDM型3D打印机,简单来说,首先要制作3D打印机的外部 基本框架结构,在此框架上才能安装搭建其他的零部件。
简易3D打印机结构设计

简易3D打印机结构设计作者:项楠楠苏啸宇李金泉来源:《绿色科技》2019年第24期摘要:设计了一种简易的3D打印机,对此3D打印机的结构、耗材和打印过程等部分进行了分析,提出了改进打印过程和提高打印精度的方法,从而达到降低成本、缩减时间和提高打印精度的目的。
关键词:3D打印机;结构设计;喷头中图分类号:TN911文献标识码:A文章编号:1674-9944( 2019) 24-0213-02l 引言1988年,Scott Crump发明了一种3D打印技术——热熔解积压成形技术(FDM)[1],但价格十分高昂。
随着科技的发展,3D打印机种类增多,有些打印机价格也在不断下降,国内的3D打印技术也在快速发展,与发达国家的差距逐步减少,专门从事生产3D打印机的厂家逐渐增多,打印精度可以达到0. 05~0.4mm[2,3]。
3D打印机对于一些难加工的异形部件有着传统加工方式难以替代的优势,极大的方便了人们的生活,如何在保证精度的前提下尽量降低成本,一直是科研人员研究的目标。
基于此,本文对简易3D打印机的结构设计进行了研究。
2 打印机结构和运动原理简易3D打印机由底部框架1、立式支架2、伺服电机3、同步齿形带4、滑轨5、送料齿轮6、伺服电机7、推杆8、滑块9、限位块10、顶部框架11、风扇12、喷嘴13构成,如图1。
其中立式支架2、伺服电机3、同步齿形带4、滑轨5、滑块9、限位块10和两个推杆8构成一套控制机构,此3D打印机由三套这样的控制机构控制,分别称为X塔、Y塔和Z塔,喷嘴12的运动全部由这3个塔控制。
在单个塔对喷嘴运动的控制中,主要可分为两种运动方式。
一种是推杆8和喷头12相对静止,电机3带动同步齿形带4,使滑块9上下移动,最终带动喷嘴12在Z方向上下移动。
图1为此3D打印机结构。
第二种是喷嘴12在Z轴的高度不变,只在控制機构所在平面的X轴方向运动,简化模型如图2所示。
设定推杆8杆长为C,则C的X轴和Y轴投影分别为B、A,则根据勾股定理A2+ B2=C2,当拉杆运动之后.X轴向投影的增加量为,y轴向投影的增加量为△y。
一种便捷式3D打印机的结构设计
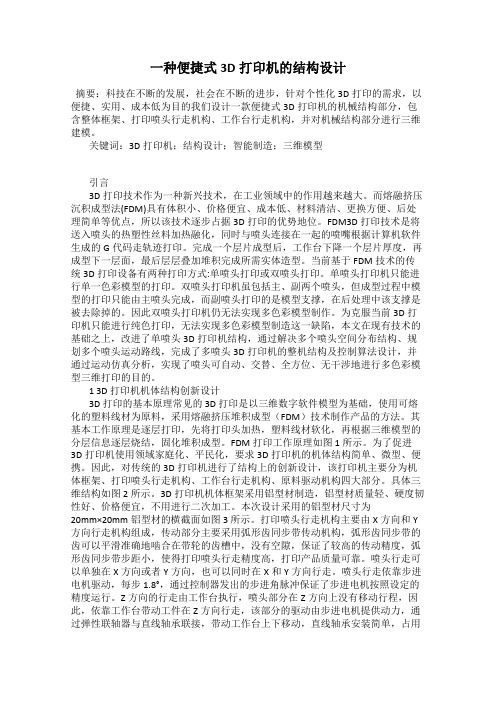
一种便捷式3D打印机的结构设计摘要:科技在不断的发展,社会在不断的进步,针对个性化3D打印的需求,以便捷、实用、成本低为目的我们设计一款便捷式3D打印机的机械结构部分,包含整体框架、打印喷头行走机构、工作台行走机构,并对机械结构部分进行三维建模。
关键词:3D打印机;结构设计;智能制造;三维模型引言3D打印技术作为一种新兴技术,在工业领域中的作用越来越大。
而熔融挤压沉积成型法(FDM)具有体积小、价格便宜、成本低、材料清洁、更换方便、后处理简单等优点,所以该技术逐步占据3D打印的优势地位。
FDM3D打印技术是将送入喷头的热塑性丝料加热融化,同时与喷头连接在一起的喷嘴根据计算机软件生成的G代码走轨迹打印。
完成一个层片成型后,工作台下降一个层片厚度,再成型下一层面,最后层层叠加堆积完成所需实体造型。
当前基于FDM技术的传统3D打印设备有两种打印方式:单喷头打印或双喷头打印。
单喷头打印机只能进行单一色彩模型的打印。
双喷头打印机虽包括主、副两个喷头,但成型过程中模型的打印只能由主喷头完成,而副喷头打印的是模型支撑,在后处理中该支撑是被去除掉的。
因此双喷头打印机仍无法实现多色彩模型制作。
为克服当前3D打印机只能进行纯色打印,无法实现多色彩模型制造这一缺陷,本文在现有技术的基础之上,改进了单喷头3D打印机结构,通过解决多个喷头空间分布结构、规划多个喷头运动路线,完成了多喷头3D打印机的整机结构及控制算法设计,并通过运动仿真分析,实现了喷头可自动、交替、全方位、无干涉地进行多色彩模型三维打印的目的。
1 3D打印机机体结构创新设计3D 打印的基本原理常见的 3D 打印是以三维数字软件模型为基础,使用可熔化的塑料线材为原料,采用熔融挤压堆积成型(FDM)技术制作产品的方法。
其基本工作原理是逐层打印,先将打印头加热,塑料线材软化,再根据三维模型的分层信息逐层烧结,固化堆积成型。
FDM 打印工作原理如图 1 所示。
为了促进3D打印机使用领域家庭化、平民化,要求3D打印机的机体结构简单、微型、便携。
3D打印机的机械结构设计
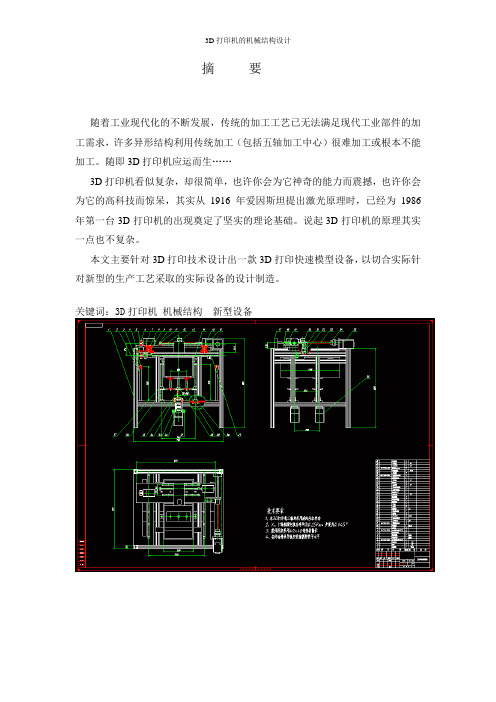
摘要随着工业现代化的不断发展,传统的加工工艺已无法满足现代工业部件的加工需求,许多异形结构利用传统加工(包括五轴加工中心)很难加工或根本不能加工。
随即3D打印机应运而生……3D打印机看似复杂,却很简单,也许你会为它神奇的能力而震撼,也许你会为它的高科技而惊呆,其实从1916年爱因斯坦提出激光原理时,已经为1986年第一台3D打印机的出现奠定了坚实的理论基础。
说起3D打印机的原理其实一点也不复杂。
本文主要针对3D打印技术设计出一款3D打印快速模型设备,以切合实际针对新型的生产工艺采取的实际设备的设计制造。
关键词:3D打印机机械结构新型设备ABSTRACTWith the continuous development of modern industry, the traditional processing technology has been unable to meet the processing needs of modern industrial parts, the traditional processing and utilization of many deformed structure (including five axis machining center) is difficult to be machined or cannot process. Then emerge as the times require 3D printer......3D printer may seem complicated, but is very simple, you might and shook it magical abilities, perhaps you will be stunned for its high-tech, in fact, the principle of laser Einstein from 1916, has laid a solid theoretical foundation for the emergence of 1986 the first 3D printer. About the principle of 3D printer is not complicated.In this paper, the 3D printing technology to design a 3D print speed model of equipment, design and manufacture of the equipment to the practical production process model for the equipment.Keywords:3D printer mechanical structure model of equipment3D打印机设计目录第一章绪论 (1)1.1 课题来源及研究目的和意义 (1)1.2 本次设计的主要内容 (5)1.3 3D打印设备方案分析 (5)1.3.1 机械结构设计思路 (5)1.3.2 机械结构总体方案和布局 (6)第2 章机械结构设计 (8)2.1 电机的选择 (8)2.2 滚珠丝杠螺母副的设计 (10)2.2.1 材料选用原则 (10)2.2.2 丝杠螺母工作条件及失效形式 (11)2.2.3 螺旋传动类型特点和应用 (11)2.2.4 滚珠丝杠螺母副的计算 (12)2.2.5 滚珠丝杠螺母的支撑方式 (18)2.2.6 滚珠丝杠螺母的润滑和防尘隔离 (18)2.3 导向光杆和直线轴承的设计 (20)2.4 联轴器的设计选择 (23)2.5 同步带轮的设计计算 (23)第3 章结构设计及三维建模 (26)3.1 主体结构设计的是三维建模 (27)3.2 整体装配建模 (30)3.3 标准件建模 (30)结论 (38)参考文献 (39)致谢 (40)第1章绪论1.1 课题来源及研究目的和意义3D打印机有时被称为快速成型机,用液体或粉状塑料制造物品,其运作原理和传统打印机十分相似。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简易3D打印机结构设计
1988年,Scott Crump发明了一种3D打印技术——热熔解积压成形技术(FDM),但价格十分高昂。
随着科技的发展,3D打印机种类增多,有些打印机价格也在不断下降,国内的3D打印技术也在快速发展,与发达国家的差距逐步减少,专门从事生产3D打印机的厂家逐渐增多,打印精度可以达到0. 05~0.4mm[2,3]。
3D打印机对于一些难加工的异形部件有着传统加工方式难以替代的优势,极大的方便了人们的生活,如何在保证精度的前提下尽量降低成本,一直是科研人员研究的目标。
基于此,本文对简易3D打印机的结构设计进行了研究。
2 打印机结构和运动原理
简易3D打印机由底部框架1、立式支架2、伺服电机3、同步齿形带4、滑轨5、送料齿轮6、伺服电机7、推杆8、滑块9、限位块10、顶部框架11、风扇12、喷嘴13构成,如图1。
其中立式支架2、伺服电机3、同步齿形带4、滑轨5、滑块9、限位块10和两个推杆8构成一套控制机构,此3D打印机由三套这样的控制机构控制,分别称为X塔、Y塔和Z塔,喷嘴12的运动全部由这3个塔控制。
在单个塔对喷嘴运动的控制中,主要可分为两种运动方式。
一种是推杆8和喷头12相对静止,电机3带动同步齿形带4,使滑块9上下移动,最终带动喷嘴12在Z方向上下移动。
图1为此3D打印机结构。
第二种是喷嘴12在Z轴的高度不变,只在控制机构所在平面的X轴方向运动,简化模型如图2所示。
设定推杆8杆长为C,则C的X轴和Y轴投影分别为B、A,则根据勾股定理A2+ B2=C2,当拉杆运动之后.X轴向投影的增加量为,y轴向投影的增加量为△y。
所以有:
所以运动可以转化为以(-B,A)为圆心,C为半径的圆,当z=O,
y=o时,喷头处于初始位置,圆上的点的坐标意味着当喷嘴水平移动x时,滑块竖直方向需移动的距离y。
而在水平方向上,有3个这样的机构在控制着喷嘴12移动,所以喷嘴的最终移动方向,是由3个方向上的向量叠加而成的,这样控制的运动,精度比两个电机分别控制X、Y方向要更高。
3 工作原理
软件方面需要首先将想要打印的STL三维模型做成.Gcode切片模型,然后连接到打印机,在cura界面调整打印机的参数,让打印机读取切片文件,根据切片文件来形成预定轨迹,按轨迹打印出模型。
在硬件方面,由于3D打印机采用了熔融沉积成形技术(FDM)[5,6],所以在打印之前需要预热喷嘴12。
同时加热打印台,防止打印时打印件冷却过早。
预热到设定温度后即开始打印。
由伺服电机7带动送料齿轮6将PLA耗材通过输料管输送到喷嘴12位置,喷嘴部分将PLA耗材熔化并喷出,由伺服电机3带动同步齿形带4控制3根滑轨上滑块9的位置,滑块9通过与喷嘴12连接的推杆8来控制喷嘴位置,用累加的方法将所需模型堆叠出来,打印完成后,喷嘴12自动回位,由限位块10限制滑块9的位置。
图3为3D打印机实物图片,图4为打印成品图。
4 结语
本文分析了3D打印機的结构,在实际操作中,改变软件中设定的B和A的数值与实物数值相匹配,提高了打印机的打印精度和准确性。
同时软件设置中层厚和填充率对打印速度都有影响,更小的层厚或更大的填充率会减慢打印速度。
同时在打印过程中,需要在打印台上贴一层美纹胶带来提高粘附性,防止翘边。
通过改变这些软件和硬件方面的设置,最终成功地使打印的过程更加流畅。