孟祥莲--嵌入式系统原理及应用教程-部分习题答案20150618
嵌入式系统原理及应用慕课答案

嵌入式系统原理及应用慕课答案1.与个人计算机(PC)相比,嵌入式系统具有许多不同的特点。
下面不属于嵌入式系统特点的是()。
A)嵌入式系统与具体应用紧密结合,具有很强的专用性B)嵌入式系统通常包含在非计算机设备(系统)中,具有隐蔽性C)嵌入式系统的软硬件资源往往受到严格的限制D)嵌入式系统性能较低,价格也比较便宜【解析】:与人们日常使用的个人计算机相比,嵌入式系统具有许多不同的特点。
1)专用型,嵌入式系统与具体应用紧密结合,具有很强的专用型;2)隐蔽性,嵌入式系统通常总是非计算机设备(系统)中的一个部分,它们隐藏在其内部,不为人知;3)资源受限,嵌入式系统通常要求小型化、轻量化、低功耗及低成本,因此其软硬件资源受到严格的限制;4)高可靠性;5)实时性;6)软件固化。
综上所述,D选项不属于嵌入式系统的特点。
2.嵌入式系统中的CPU具有一些与通用计算机所使用的CPU不同的特点,下面不是其特点的是()。
A)支持实时处理B)低功耗C)高主频D)集成了测试电路【解析】:嵌入式系统中的CPU一般具有4个特点:1)支持实时处理;2)低功耗;3)结构可扩展;4)集成了测试电路。
因此,该题选C。
3.嵌入式系统使用的片上系统英文缩写名为SoC,下面关于SoC 叙述中错误的是()。
A)Soc也称为系统级芯片,它是电子设计自动化水平的提高和集成电路制造技术飞速发展的产物B)Soc芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/模拟混合电路和射频电路C)Soc将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、转换、存储、处理和I/O等多种功能D)Soc的设计制造难度很大,目前还没有得到广泛使用【解析】:随着电子设计自动化水平的提高和VLSI制造技术的飞速发展,半导体加工已经从微米、亚微米进入到深亚微米的时代,单个芯片上可以集成几亿个甚至几十亿个晶体管,因而能够把计算机或其他一些电子系统的全部电路都集成在单个芯片上,这种芯片就是所谓的片上系统。
嵌入式系统原理及应用答案
嵌入式系统原理及应用答案一、单项选择题:每题 3分,共 15 题,共计45 分1、嵌入式风险防控机制中的风险点分为哪几个风险等级() [单选题] *A、 A、B、C三个等级(正确答案)B、 A、B两个等级C、 A、B、C、D四个等级D、 A、B、C、D、E五个等级2、重庆公司嵌入式防控督查检查频次,业务主管()检查一次,分公司()检查一次。
[单选题] *A、每半年,每季度(正确答案)B、每季度,每半年C、每半年,每半年D、每季度,每季度3、嵌入式廉洁风险防控机制建设是各级党委落实()的重要抓手,和各级纪委履行()的重点方向。
[单选题] *A、监督责任,主体责任B、检查责任,监督责任C、主体责任,监督责任(正确答案)D、主体责任,考核责任4、关于嵌入式廉洁风险防控坚持“五问”标准,“行不行”是指()。
[单选题] *A、检查制度是否有漏项,明确必须为的、可以为的、不能为的B、检查制度是否与时俱进C、检查制度是否与上位法保持一致、与平行制度保持协调D、检查制度是否科学,防止“牛栏关猫”(正确答案)5、嵌入式风险防控机制防控的是()风险。
[单选题] *A、廉洁(正确答案)B、安全C、金融D、建设6、公司主要领导调查研究时,陪同的部门负责人原则上不超过()人,所到单位负责人不超过()人陪同;其他公司领导调查研究时,陪同的部门负责人原则上不超过()人,所到单位可安排()名负责人陪同,主要负责人可不陪同;公司领导深入到基层调查研究时,不搞层层多人陪同,调研点所在单位安排()名负责人陪同。
[单选题] *A、5、2、3、1、1(正确答案)B、4、2、3、1、1C、5、2、3、2、1D、4、2、3、1、27、内部业务招待活动,接待对象在10人以内的,陪餐人数不得超过人()。
[单选题] *A、2B、3(正确答案)C、4D、58、国家法定节假日期间(元旦、春节、清明节、劳动节、端午节、中秋节、国庆节),除有特殊情况,一般不安排业务招待。
嵌入式系统原理与应用课后答案

嵌入式系统原理与应用课后答案1. 第一章答案:a. 嵌入式系统是嵌入到其他系统中的小型电子系统,一般具有特定的功能和任务。
它以硬件和软件的结合形式存在。
b. 嵌入式系统具有实时性、可靠性和可扩展性的要求,并且一般运行在资源受限的环境中。
c. 嵌入式系统可分为实时嵌入式系统和嵌入式控制系统两种类型。
d. 实时嵌入式系统需要按照严格的时间要求完成任务,可以分为硬实时和软实时系统。
2. 第二章答案:a. 嵌入式系统的硬件平台由微处理器、存储器、总线、输入输出设备等组成。
b. 嵌入式系统的硬件平台性能指标包括:处理器的主频、存储器的容量和带宽、总线的带宽和响应时间、输入输出设备的性能等。
c. 嵌入式系统的软件平台由操作系统、应用软件和驱动程序等组成。
d. 实时操作系统是嵌入式系统的核心软件,它可以提供任务调度、资源管理、中断处理等功能。
3. 第三章答案:a. 嵌入式系统的开发流程包括需求分析、系统设计、硬件设计、软件设计、系统集成和测试等阶段。
b. 嵌入式系统开发中常用的设计工具包括仿真工具、编译工具、调试工具和测试工具等。
c. 嵌入式系统的设计方法可以分为自顶向下设计和自底向上设计两种。
d. 自顶向下设计是先定义系统的整体结构,再逐步详细设计每个组件的功能和接口。
e. 自底向上设计是先设计每个组件的功能和接口,再逐步将它们组合起来形成系统。
4. 第四章答案:a. 嵌入式系统的程序设计语言可以分为汇编语言、高级语言和特定领域语言三种。
b. 汇编语言是一种低级语言,使用机器指令来编写程序,可以直接控制硬件。
c. 高级语言是一种抽象层次较高的语言,使用类似自然语言的语法来编写程序,更易理解和维护。
d. 嵌入式系统常用的高级语言包括C语言和C++语言。
e. 特定领域语言是一种专门为某种特定应用领域设计的语言,具有特定领域的特性和功能。
5. 第五章答案:a. 嵌入式系统的编程模型可以分为裸机编程和操作系统编程两种。
嵌入式系统原理及接口复习要点及思考题答案计

各位:根据掌握要点汰真复习,后面附有作业18答案。
第1章掌握要点1.1.1节巌入衣系统的杨念1.1. 3节敲入茨系统的特点1・3节械入式处理器1・4节磁入式系坑的组欣(看媒件,有补充的容)补:1.W入式系筑开发过程?2 •巌入式系筑坍试常用的基本方法3 •交叉编译和交叉调试4展入式操作系竦第2章掌握要贞2.1节廿算机体系结枸分类2.3.1 节ARM 利Thumb 狀态2.3.2节RISC技术2.3.3节浦水线技术2.4.1 ARM存储系统2.4.2 Cache:写通、写回、挟操作分配cache、写操作分配cache、工作原理、地址映像2.4.3节ARM存储系筑补充:(见课件)1.ARM简介:ARM的命名方衣、5种变形2•理解片Flash的3种编程方法。
3.理解ARM7苏片存储器存储空间分布。
(8个bank,每个bank32MB )第3章掌握要点3.1节ARMS程模衣:处理器模式、处理器工作状态、寄存器组级、异常中断3.2节指令格式利寻址方成3.3节指令系竦:掌握和鬆练应用澡件所曲的指令、可编程序段第5章掌握要我5」节變盘接口 : fiflfll法原理、拿握编写驱动程序5.2节LED显示器接口:理解工作原理,拿握编耳驱动程序5. 5.1节UART异步审行接口:异步通信格式、接收的4种錯娱类塑、初始化、发送程序、接收程序第1章作业題答案:1・什么是嵌入衣系鋭?•第一种,根据IEEE(国际电气利电子工程师协会)的定义:械入式系筑是"用于控匍、监視或者辅助操作机器利按备的装置"(原文为devices used to control, monitor, or assist the operation of equipment, machinery or plants )o•第二种,嵌入式系统是以应用为中血、以廿算林技术为基硏、软件说件可裁剪、功能、可靠性、成本、体积、功藉严格要求的专用廿算机系筑。
《嵌入式》课后习题答案
第一章1. 简述嵌入式的定义以应用为中心、以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
2. 举例说明嵌入式系统的“嵌入性” 、“专用性” 、“计算机系统”的基本特征。
按照嵌入式系统的定义,嵌入式系统有3个基本特点,即“ 嵌入性”、“ 专用性”与“ 计算机”。
“嵌入性”由早期微型机时代的嵌入式计算机应用而来,专指计算机嵌入到对象体系中,实现对象体系的智能控制。
当嵌入式系统变成一个独立应用产品时,可将嵌入性理解为内部嵌有微处理器或计算机。
“计算机”是对象系统智能化控制的根本保证。
随着单片机向MCU SoC发展,片内计算机外围电路、接口电路、控制单元日益增多,“专用计算机系统”演变成为“内含微处理器”的现代电子系统。
与传统的电子系统相比较,现代电子系统由于内含微处理器,能实现对象系统的计算机智能化控制能力。
“专用性”是指在满足对象控制要求及环境要求下的软硬件裁剪性。
嵌入式系统的软、硬件配置必须依据嵌入对象的要求,设计成专用的嵌入式应用系统。
3. 简述嵌入式系统发展各阶段的特点。
(1)无操作系统阶段:使用简便、价格低廉;(2)简单操作系统阶段:初步具有了一定的兼容性和扩展性,内核精巧且效率高,大大缩短了开发周期,提高了开发效率。
(3)实时操作系统阶段:系统能够运行在各种不同类型的微处理器上,具备了文件和目录管理、设备管理、多任务、网络、图形用户界面Graphic User Interface ,GUI )等功能,并提供了大量的应用程序接口Application Programming Interface ,API ),从而使应用软件的开发变得更加简单。
(4)面向Internet 阶段:进入21 世纪,Internet 技术与信息家电、工业控制技术等的结合日益紧密,嵌入式技术与Internet 技术的结合正在推动着嵌入式系统的飞速发展4. 简述嵌入式系统的发展趋势。
嵌入式课后练习题答案

第1章1、什么是嵌入式系统?嵌入式系统的组成?从技术的角度定义:以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
从系统的角度定义:嵌入式系统是设计完成复杂功能的硬件和软件,并使其紧密耦合在一起的计算机系统。
术语嵌入式反映了这些系统通常是更大系统中的一个完整的部分,称为嵌入的系统。
嵌入的系统中可以共存多个嵌入式系统。
2、典型的嵌入式处理器有哪些?3、典型的RTOS操作系统有哪些?4、列举身边的嵌入式应用产品?第2章Cortex-M体系结构一题:填空题1、ARM Cortex系统的处理器分为:____A_____、____R_____、_____M_____。
2、ARM Cortex-M3为32位微控制器,请问32位指的是CPU字长。
3、ARM Cortex-M3体系结构采用哈佛总线结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行进行。
4、CM3寄存器分为通用寄存器,包括R0~R15。
和特殊功能寄存器,包括程序状态寄存器、异常屏蔽寄存器、控制寄存器。
5、寄存器R13是堆栈指针寄存器。
6、寄存器R14是程序连接寄存器。
7、寄存器R15是程序PC。
8、CM3的堆栈指针分为__MSP__、__PSP_。
存储器堆栈堆栈分为:向上生长(即向高地址方向生长)的递增堆栈;向下生长(即向低地址方向生长),称为递减堆栈。
堆栈指针指向最后压入堆栈的有效数据项,称为满堆栈;堆栈指针指向下一个数据项放入的空位置,称为空堆栈。
试判断CM3属于递减堆栈堆栈和满堆栈堆栈。
9、在CM3中记录程序状态的寄存器是___xPSR____。
都分别有些什么状态_应用状态、中断状态、可执状态。
10、BASEPRI寄存器的作用是___屏蔽优先级低于某一个数值的异常____。
11、寄存器CONTROL的作用是控制处理器模式及堆栈切换。
MOV R0,#0x01MSR CONTROL,R0在8级优先中,请问上述程序的功能是处理器工作在用户模式主堆栈下。
嵌入式习题答案

第一章习题答案1.什么是嵌入式系统?请列举几个常见的嵌入式系统。
答:根据国际电气和电子工程师协会(IEEE)的定义,嵌入式系统是控制、监视或者辅助设备、机器和生产线运行的装置(Devices used to control, monitor, or assist the operation of equipment, machinery or plants)。
这主要是从产品的应用角度加以定义的,由此可以看出嵌入式系统是软件和硬件的综合体,可以涵盖机械等附属装置。
目前被我国科学家普遍认同的定义是:嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可裁减,对功能、可靠性、成本、体积、功耗要求严格的专用计算机系统。
常见的嵌入式系统:手机,DVD,路由器,核磁共振仪,全自动洗衣机。
2.嵌入式系统与通用计算机有哪些区别?答:(1) 以应用为中心;(2) 以计算机技术为基础(3) 软件和硬件可裁减(4) 对系统性能要求严格(5)软件的固件化(6)需要专用的开发工具3.嵌入式系统的发展分为哪几个阶段?答:第一阶段:无操作系统的嵌入算法阶段。
第二阶段:以嵌入式CPU为基础,以简单操作系统为核心的嵌入式系统。
第三阶段:以嵌入式操作系统为标志的嵌入式系统。
第四阶段:以基于Internet为标志的嵌入式系统。
4.请列举嵌入式系统的主要应用领域。
答:(1)工业控制领域(2)交通运输领域(3)消费电子产品(4)家电领域(5)通信领域(6)商业和金融领域(7)环境监测领域(8)医疗领域(9)建筑领域(10)军事国防领域(11)航天航空领域第二章习题答案1.简述简单嵌入式系统与复杂嵌入式系统的主要区别。
答:简单嵌入式系统很早就已经存在,这类嵌入式系统因为软硬件复杂度都很低,一般不使用操作系统,例如常用的单片机系统。
对于复杂的嵌入式系统,它的开发模式发生了极大的改变。
一个复杂的嵌入式系统不仅硬件系统的开发比单片机复杂了许多,更重要的是在该系统中采用了嵌入式操作系统,其应用软件的开发转变为使用操作系统标准接口的计算机工程领域的应用软件开发。
嵌入式系统课后习题-部分答案(PDF)
第一章1-1.简述嵌入式系统的定义。
嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。
1-2.简述嵌入式系统的组成。
从体系结构上看,嵌入式系统主要由嵌入式处理器、支撑硬件和嵌入式软件组成。
其中嵌入式处理器通常是单片机或微控制器,支撑硬件主要包括存储介质、通信部件和显示部件等,嵌入式软件则包括支撑硬件的驱动程序、操作系统、支撑软件及应用中间件等。
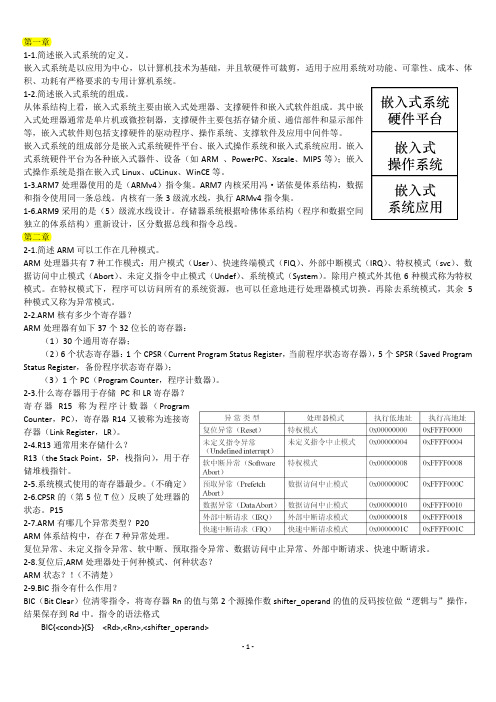
嵌入式系统的组成部分是嵌入式系统硬件平台、嵌入式操作系统和嵌入式系统应用。
嵌入式系统硬件平台为各种嵌入式器件、设备(如ARM 、PowerPC、Xscale、MIPS等);嵌入式操作系统是指在嵌入式Linux、uCLinux、WinCE等。
1-3.ARM7处理器使用的是(ARMv4)指令集。
ARM7内核采用冯·诺依曼体系结构,数据和指令使用同一条总线。
内核有一条3级流水线,执行ARMv4指令集。
1-6.ARM9采用的是(5)级流水线设计。
存储器系统根据哈佛体系结构(程序和数据空间独立的体系结构)重新设计,区分数据总线和指令总线。
第二章2-1.简述ARM可以工作在几种模式。
ARM处理器共有7种工作模式:用户模式(User)、快速终端模式(FIQ)、外部中断模式(IRQ)、特权模式(svc)、数据访问中止模式(Abort)、未定义指令中止模式(Undef)、系统模式(System)。
除用户模式外其他6种模式称为特权模式。
在特权模式下,程序可以访问所有的系统资源,也可以任意地进行处理器模式切换。
再除去系统模式,其余5种模式又称为异常模式。
2-2.ARM核有多少个寄存器?ARM处理器有如下37个32位长的寄存器:(1)30个通用寄存器;(2)6个状态寄存器:1个CPSR(Current Program Status Register,当前程序状态寄存器),5个SPSR(Saved Program Status Register,备份程序状态寄存器);(3)1个PC(Program Counter,程序计数器)。
嵌入式系统原理与接口技术习题答案

《嵌入式ARM基础》习题第一章什么是嵌入式操作系统答:嵌入式系统是以应用为中心,以计算机技术为基础,软/硬件可裁减,功能。
可靠性,成本,体积,功耗要求严格的专用计算机系统。
与通用计算机相比,嵌入式系统有哪些特点答:(1).嵌入式系统通常是面向特定应用的;(2).嵌入式系统是将计算机技术,半导体技术和电子技术与各行各业的具体应用相结合的后的产物,是一门综合技术学科;(3).嵌入式系统和具体应用有机的结合在一起,它的升级换代也是和具体产品同步进行的,因此嵌入式产品一旦进入市场,就有较长的生命周期;(4).为了提高执行速度和可靠性,嵌入式系统中的软件一般都固化在存储器芯片或单片机本身中,而不是存储于磁盘等载体中;(5).嵌入式系统本身不具有自主开发能力,即使设计完成以后用户通常也不能对其中的程序功能进行修改,必须有一套开发工具和环境才能进行开发。
根据嵌入式的复杂程度,嵌入式系统可分为哪4类答:1.单个微处理器;2.嵌入式处理器可扩展系统;3.复杂的嵌入式系统;4.在制造或过程控制中使用的计算机系统;举例介绍嵌入式处理器有哪几类答:1.嵌入式微处理器(Embedded Microprocessor Unit,EMPU);2.嵌入式微控制器;(Embedded Microcontroller Unit,EMCU)3.嵌入式DSP处理器(Embedded Digital Signal Processor,EDSP);4.嵌入式片上系统(Embedded System on Chip,EsoC);从硬件系统来看,嵌入式系统由哪几个部分组成画出简图。
电源模块Flash微处理器MPU时钟RAM复位ROM外设USBLCDkeyboardother.嵌入式系统中,非数值数据编码主要包括哪几种答:1.字符表示;2.汉字编码;3.语音编码;若在嵌入式系统采用CRC码进行信息传输,接收端接收到的码字为101011,已知生成多项式g(x)=1011,问收到的码字是否正确出错的是哪一位解:收到的码字不正确;出错的是第4位。
嵌入式系统课后习题及答案
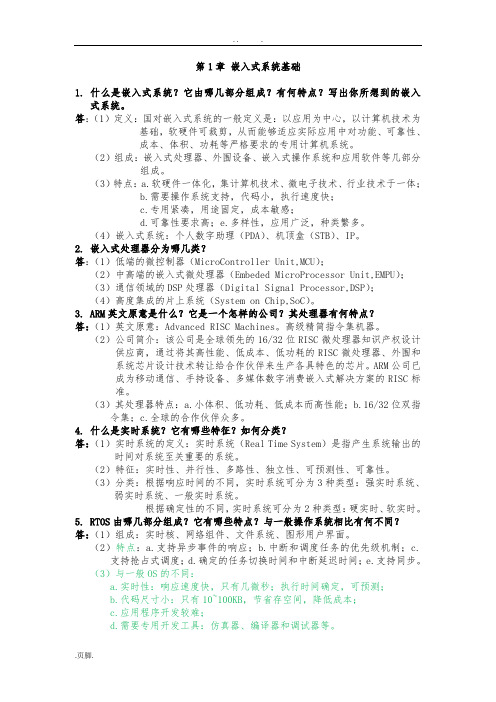
第1章嵌入式系统基础1.什么是嵌入式系统?它由哪几部分组成?有何特点?写出你所想到的嵌入式系统。
答:(1)定义:国对嵌入式系统的一般定义是:以应用为中心,以计算机技术为基础,软硬件可裁剪,从而能够适应实际应用中对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。
(2)组成:嵌入式处理器、外围设备、嵌入式操作系统和应用软件等几部分组成。
(3)特点:a.软硬件一体化,集计算机技术、微电子技术、行业技术于一体;b.需要操作系统支持,代码小,执行速度快;c.专用紧凑,用途固定,成本敏感;d.可靠性要求高;e.多样性,应用广泛,种类繁多。
(4)嵌入式系统:个人数字助理(PDA)、机顶盒(STB)、IP。
2.嵌入式处理器分为哪几类?答:(1)低端的微控制器(MicroController Unit,MCU);(2)中高端的嵌入式微处理器(Embeded MicroProcessor Unit,EMPU);(3)通信领域的DSP处理器(Digital Signal Processor,DSP);(4)高度集成的片上系统(System on Chip,SoC)。
3.ARM英文原意是什么?它是一个怎样的公司?其处理器有何特点?答:(1)英文原意:Advanced RISC Machines。
高级精简指令集机器。
(2)公司简介:该公司是全球领先的16/32位RISC微处理器知识产权设计供应商,通过将其高性能、低成本、低功耗的RISC微处理器、外围和系统芯片设计技术转让给合作伙伴来生产各具特色的芯片。
ARM公司已成为移动通信、手持设备、多媒体数字消费嵌入式解决方案的RISC标准。
(3)其处理器特点:a.小体积、低功耗、低成本而高性能;b.16/32位双指令集;c.全球的合作伙伴众多。
4.什么是实时系统?它有哪些特征?如何分类?答:(1)实时系统的定义:实时系统(Real Time System)是指产生系统输出的时间对系统至关重要的系统。
嵌入式习题答案(DOC)

第一章习题答案1.什么是嵌入式系统请列举几个常见的嵌入式系统。
答:根据国际电气和电子工程师协会(IEEE)的定义,嵌入式系统是控制、监视或者辅助设备、机器和生产线运行的装置(Devices used to control, monitor, or assist the operation of equipment, machinery or plants)。
这主要是从产品的应用角度加以定义的,由此可以看出嵌入式系统是软件和硬件的综合体,可以涵盖机械等附属装置。
目前被我国科学家普遍认同的定义是:嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可裁减,对功能、可靠性、成本、体积、功耗要求严格的专用计算机系统。
常见的嵌入式系统:手机,DVD,路由器,核磁共振仪,全自动洗衣机。
2.嵌入式系统与通用计算机有哪些区别答:(1) 以应用为中心;(2) 以计算机技术为基础(3) 软件和硬件可裁减(4) 对系统性能要求严格(5)软件的固件化(6)需要专用的开发工具3.嵌入式系统的发展分为哪几个阶段答:第一阶段:无操作系统的嵌入算法阶段。
第二阶段:以嵌入式CPU为基础,以简单操作系统为核心的嵌入式系统。
第三阶段:以嵌入式操作系统为标志的嵌入式系统。
第四阶段:以基于Internet为标志的嵌入式系统。
4.请列举嵌入式系统的主要应用领域。
~答:(1)工业控制领域(2)交通运输领域(3)消费电子产品(4)家电领域(5)通信领域(6)商业和金融领域(7)环境监测领域(8)医疗领域(9)建筑领域(10)军事国防领域(11)航天航空领域第二章习题答案1.简述简单嵌入式系统与复杂嵌入式系统的主要区别。
答:简单嵌入式系统很早就已经存在,这类嵌入式系统因为软硬件复杂度都很低,一般不使用操作系统,例如常用的单片机系统。
对于复杂的嵌入式系统,它的开发模式发生了极大的改变。
一个复杂的嵌入式系统不仅硬件系统的开发比单片机复杂了许多,更重要的是在该系统中采用了嵌入式操作系统,其应用软件的开发转变为使用操作系统标准接口的计算机工程领域的应用软件开发。
《嵌入式系统》练习题一答案.doc

《嵌入式系统》练习题一答案一、填空题1.芯片技术2. 43.调试通道4.传送命令或回传结果5.偶数6.内存管理7.S8.SWI9.extern1(). EXPORT11 •哈佛结构12.嵌入式操作系统13.非易失性存储器14.概要设计或基础设计15•没有16.硕链接17.算术右移18.程序计数器19.相互调用20.BL 或BLX21.专用22.板级支持包23.AXD24.arm-linux-ld25.静态库二、选择题1.A2. B3. C4. B5. B6. B7. B8. C9.D10. C11. C13.C14. D15. D16. A17. C18. B19. B20. B21. D22. C23. A24. C25. A三、判断题1.错2.错3.错4.对5.对6.错7.错8・错9.错10.对11.对12.对13.错14.对15.错16.对17.错1&错19.对20.対21.对22.错24.错25.错四、简答题1.什么是可编程片上系统(SOPC) ?用可编程逻辑技术把整个系统放到一块硅片上,称作SOPCo可编程片上系统(SOPC)是一种特殊的嵌入式系统:首先它是片上系统(SOC),即由单个芯片完成整个系统的主要逻辑功能;其次,它是可编程系统,具有灵活的设计方式,可裁剪、可扩充、可升级,并具备软硬件在系统可编程的功能。
2.什么是嵌入式交叉调试?交叉调试的方式冇哪儿种?答:嵌入式交叉调试也称为远程调试,这种调试技术是将调试工具软件安装在PC上(称为宿主机,上位机)运行,通过数据通信的方法向目标机(也称为下位机)发出指令,控制目标机的运行,并口从冃标板(通常也称为开发板)上获取运行参数,再在主机上进行观察。
运行在主机上的调试工具不仅能够观察到程序的运行参数(如寄存器或存储单元的值),还能够进行单步跟踪,临时修改变量数据,并进行各种调试。
交叉调试的方式有:指令集模拟器、ROM仿真器、片上调试、实吋在线调试、基于Angel的调试、基于JTAG的调试、Nexus调试和半主机调试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题11.嵌入式系统的概念的是什么?答:嵌入式系统是以应用为中心,以计算机技术为基础,软、硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。
(嵌入式系统是嵌入式到对象体系中的,用于执行独立功能的专用计算机系统。
)2.嵌入式系统的特点是什么?答:系统核小;专用性强;运行环境差异大;可靠性要求高;系统精简和高实时性操作系统;具有固化在非易失性存储器中的代码嵌入式系统开发和工作环境4.嵌入式系统的功能是什么?答:提供强大的网络服务小型化,低成本,低功能;人性化的人机界面;完善的开发平台5.嵌入式系统的硬件平台由哪些部分组成?答:嵌入式系统的硬件是以嵌入式处理器为核心,由存储器I/O单元电路,通信模块,外部设备必要的辅助接口组成的。
7.嵌入式操作系统的主要特点是什么?答:体积小;实时性;特殊的开发调试环境。
8.叙述嵌入式系统的分类。
答:按嵌入式微处理器的位数分类可以分为4位、8位、16位、32位和64位等;按软件实时性需求分类可以分为非实时系统(如PDA),软实时系统(如消费类产品)和硬实时系统(如工业实时控制系统);按嵌入式系统的复杂程度分类可以分为小型嵌入式系统,中型嵌入式系统和复杂嵌入式系统。
习题21.ARM9处理器和工作状态有哪些?答:ARM状态:此时处理器执行32位的的字对齐的ARM指令。
Thumb状态:此时处理器执行16位的,半字对齐的Thumb指令2.叙述ARM9部寄存器结构,并分别说明R13、R14、R15寄存器的作用。
答:共有37个部寄存器,被分为若干个组(BANK),这些寄存器包括31个通用寄存器,包括程序计数器(PC指针)6个状态寄存器。
R13用作堆栈指针,R14称为子程序寄存器,R15用作程序计数器。
4.ARM处理器的工作模式有哪些?答:用户模式:ARM处理器正常的程序执行状态。
快速中断模式:用于高速数据传输或通道处理外部中断模式:用于通用中断处理管理模式:操作系统使用的保护模式数据访问终止模式:当数据或指令预期终止时进入该模式,可用于虚拟存储器及存储保护系统模式:运行具有特权的操作系统任务未定义指令终止模式:当未定义的指令执行时进入该模式,可用于支持硬件协处理器的软件仿真。
5.ARM微处理器支持的数据类型有哪些?答:ARM微处理器中支持字节(8位)、半字(16位),字(32位)三种数据类型。
其中,字需要4字节对齐,半字需要2字节对齐。
7.叙述CPSR寄存器及其各位数据位的作用?答:CPSR是当前程序状态寄存器,是在任何模式下都可以访问的通用状态寄存器,它包括条件标志位,中断禁止位,当前处理器模式标志位,以及其他一些相关的一些相关的控制和状态位①条件码标识;N,Z,C,V均为条件码标识,它们的容可被算术或逻辑的结果所改变,并且可以决定某条指令是否被执行。
②控制位:CPSR的低8位称为控制位,当发生异常时这些位可被改变,如果处理器运行特权模式,这些位也可以由程序修改。
③保留位:CPSR 中的其余位为保留位,当改变CPSR中的条件码标志位或者控制位时保留位不要被改变,在程序中也不要使用保留位来存储数据习题31.ARM指令有哪几种寻址方式?试分别叙述其各自的特点,并举例说明。
答:①寄存器寻址:寄存器寻址就是利用寄存器中的容作为操作数,寄存器本身就是操作数地址,例:MOV R2,R3 ;R2—R3指R3中的容赋给R2②立即寻址:操作数没有存储在寄存器或存储器中,而是包含在指令的操作码中,只要取出指令也就取到了操作数.例:ADD R1,R2,#1234;R1—R1+1234③寄存器间接寻址:以寄存器中的容作为操作数的地址,而操作数本身存放在存储器中。
例:LDR R1,[R2] ;R1—[R2]④变址寻址:将寄存器的容与指令中给出的地址偏移量相加,从而得到一个操作数的有效地址。
例 LDR R0,[R1,#8] ;R0—[R1+8]⑤寄存器移位寻址:操作数由寄存器的数值进行相应移位而得到例MOV R0,R1,LSL#4⑥多寄存器寻址:一条指令可以完成多个寄存器值的传送例:LDMIA R1,{R2—R4,R5};R2—[R1]R3—[R1+4] R4—[R1+8] R5—[R1+12]⑦堆栈寻址:一种数据结构,按先进后出的方式工作,使用一个称作堆栈指针的专用寄存器指示当前的操作位置,堆栈指针总是指向栈顶。
⑧相对寻址:以程序计数器PC的当前值为基地址,指令中的地址标号作为为偏移量,将两者相加之后得到操作数的有效地址2.简述ARM9指令集的分类答:交换指令、ARM数据处理器指令、ARM分支指令、ARM协处理器指令⑤ARM软件中断指令4.请叙述处理器如何实现ARM状态和Thumb状态的切换。
答:进入Thumb状态:当操作数寄存器的状态位(位0)为1时,可以采用执行BX指令的方法,使微处理器从ARM状态切换到Thumb状态,此外,当处理处于Thumb状态时发生异常,则异常返回时,自动切换到Thumb状态。
进入ARM状态:当操作数寄存器的状态位为0时,执行BX指令时可以微处理器从Thumb 状态切换到ARM状态,此外,在处理器进行异常处理时,把PC指针放入异常模式寄存器中,并从异常向量地址开始执行程序,也可以是处理器模式切换到ARM状态6.简述ARM9的LDM/STM堆栈指令中空、满,递增、递减的含义。
答:当堆栈指针指向最后压入堆栈的数据时,称为满堆栈。
当堆栈指针指向下一个将要放入数据的空位置时,称为空堆栈;当堆栈由低向低地址向高地址生成时,称为递增堆栈;当堆栈由高地址向低地址生成时,称为递减堆栈10.BX和BL指令有什么不同答:BX指令是分支和交换指令,寄存器的地址是目标地址其中的位[0]不是地址信息,当寄存器的位[0]为1时,表明目标地址处是Thumb指令,当寄存器的位[0]为0时,表明目标地址是ARM指令,此时,要求字对准,BL指令是分支和指令,将一条指令的地址复制到R14,并引起处理器移位到目标地址,但目标地址不可以是ARM指令,BL指定不能转移到当前指令+4MB以外的地址。
习题41.ARM伪指令与Thumb伪指令有什么区别?答:与ARM指令相关的伪指令共有4条:ADR 、ADRL、 LDR 、NOP,这四条伪指令和通用的指令不同,在程序编译过程中,编译程序会为这四条指令产生代码,但这些代码不是它们自己的代码,所以尽管它们可以产生代码,但还是伪指令,与Thumb指令相关的伪指令共有3条,ADR、LDR、NOP,但这些伪指令必须出现在Thumb程序段。
3.编写一个完整的程序,结构是什么?答:在汇编语言程序中,用AREA伪指令定义一个段,并说明所定义段的相关属性,ENTPY 伪指令标示程序的入口点,接下来为语句段,执行主代码后,通过返回控制终止应用程序,并返回到DEBDG通过使用软件中断指令实现返回,在程序的末尾为END伪指令,该伪指令通知编译器停止对源文件的处理,每一个汇编程序段都必须有一条END伪指令,指示代码段的结束。
4..汇编语言中的表达式有哪些?试举例说明答:数字表达式、逻辑表达式、字符串表达式、以寄存器和程序计数器(PC)为基址的表达式。
例:BASE:A.5.汇编语言中的运算符有哪些?试说明它们的特点及使用方法.答:数字运算符:表明两个表达式之间的关系。
算术运算符“+”、“-”、“x”及“MOD”移位运算符”RDR”、“RDL“、“SHL、“SHR“逻辑运算符“AND”、“OR”、“NOT”、”EOR”逻辑运算符包括LAND,LDR,LNOT,LEOR运算符关系运算符:“=”、“>“、“>=”,“=<”,“/=”、“<”运算符单目运算符,双目运算符7.汇编语言与C/C++的混合编程通常有几种方式?答:有三种方式:在C/C++代码中嵌入汇编指令;在汇编程序和C/C++的程序之间进行变量的互访;汇编程序,C/C++程序间的相互调用。
习题51.S3C2440A芯片外部可寻址的存储空间是多少?答S3C2440A芯片外部可寻址的存储空间是1GB,被分为8个存储模块,每块128MB2.S3C2440A中的中断控制器可以从多少个中断源接收中断请求?答:S3C2440A中的中断控制器可以60个中段源接收中断请求。
这些中断源由部的外围I/O端口或部件如DMA控制器,UART,IIC等提供。
4.S3C2440A芯片有几个通道DMA,共有多少个寄存器?答:S3C2440A芯片有4个通道DMA,共有36个寄存器,其中6个用于控制DMA传输,3个用于监视DMA的控制器的状态。
5.看门狗定时器原理是什么?答:看门狗定时器用于当噪音或系统错误引起故障时恢复控制器操作的定时,看门狗定时器是一普通的16位时间间隔定时器,定时溢出来请求中断服务,每128个PCLK时钟周期产生一个复位信号。
6.触摸屏接口模式分为几类?答:触摸屏接口模式可分为:正常转换模式、分离xy坐标转换模式、自动xy坐标转换模式、等待中断模式、备用模式习题61.S3C2440A芯片的2I C总线时序中,ACK信号的作用是什么?结合相应的时序图加以说明答:在完成一个字节的传输操作后,接收器应该发送一个ACK位给发送器。
ACK位应该出现在SCL线的第9个时钟,当接收器收到第9个时钟周期时,发送器应该通过使SDA 信号线变为高电平来释放SDA信号线变为低电平,以便使SDA信号线保持在低电平,而发出ACK信号。
2.S3C2440A芯片的2I S总线有几条信号线?分别是什么?答:2I S总线有4线,即串行数据输入(IISDI),串行数据输出(IISDD),左右通道选择(IISLRCK)和串行位时钟(IISCLK)3.S3C2440A中的音频串行接口D模式是什么?答:2I S总线格式、MSBJUSTIFIED格式、采样频率和主设备时钟4.S3C2440A芯片的AC97控制器的操作流程是什么?答部数据通路流程图操作 AC—link数字接口协议 AC97掉电5.S3C2440A的摄像头接口由哪几部分组成?答:共由图像多路复用器,捕捉单元,预览计数器,多媒体数字信号编解码器,DMA 预览,DMA编解码器及特殊功能寄存器7个部分组成。
习题71.CodeWarrior IDE包括什么功能?答: <1>建立一个工程 <2>编译和工程3.什么是交叉编译?为什么要进行交叉编译?答:交叉编译是嵌入式操作系统开发过程中的一项重要技术。
其主要特征是某机器中执行的程序代码不是在本机编译生成,而是在另一台机器编译生成。
一般前者成为目标机,后者称为主机采用交叉编译的原因在于多数嵌入式目标系统不能提供足够的资源供编译过程使用,因而只好将编译过程转移到高性能的主机上进行。