微小型无人系统技术
微小型四旋翼无人机研究进展及关键技术浅析
[ 1- 2]
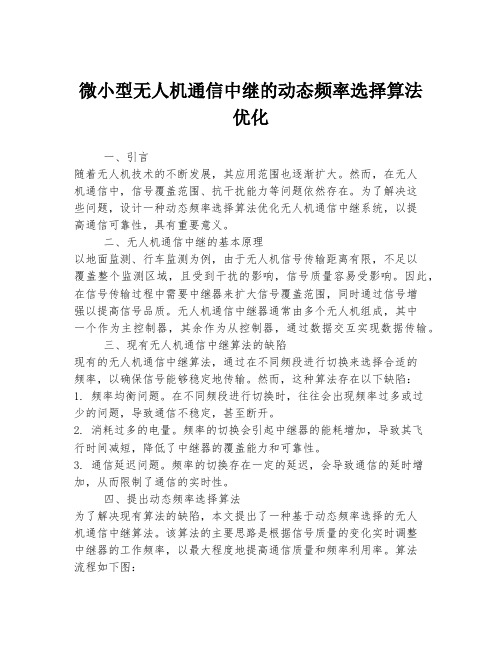
国内开展了 微 小型 四 旋翼 无 人机 的 相关 技 术研 究。主要两种四旋翼, 图 4所 示四旋 翼机 身由两 支空 心铝竿构成; 动 力 设备 采 用 Dragan flyer ! 旋 翼、 瑞士 M axon 电机以及自行 设计 的齿轮 减速 装置; 飞行 控制 系统主要包括飞行控 制计 算机、 旋 翼转速 伺服 控制子 系统、 传感器子系统、 无线通信子系统。图 5 所示四旋 翼采用玻纤板结构, 重量轻, 且不易损坏。螺旋桨采用 10 in( 1 in = 2. 54 c m ) GW S 三叶正反桨, 经过多次飞行 试验证明该桨抗 撞击 力强, 不 易折断。视 频采 集模块 可以实时传输视频 (图 像压 缩, 可以 通过 W iF i实时传 输 ) , 数据加载卡可记录飞行数据。下一步的研究目标 是实现在室外环境中 高精 度姿态 稳定控 制、 全 自主航 点飞行、 碰撞规避等实验。
图 2 X 4 F ly er 图 3 X 4 F lyer M ark I 四旋翼平台 F ig . 3 X 4 F lye rM a rk I M ark II四旋翼 平台 F ig . 2 X 4 F lye rM ark II
1 . 1 微小型四旋翼原型探索研究与开发 主要介绍瑞士洛桑联邦科技学 院 ( EPFL ), 澳 大利 亚国立大学 ( AUN ) 以 及 国内 某大 学在 微 小型 四旋 翼 无人机原型探索方面的研究进展。 瑞士洛桑联 邦科技 学院 OS4项 目 ( Omn id irect ional
。 OS4四旋翼无
人机是由电 力驱动的 (见图 1) , 可在室内 /外环 境全自 主飞行。 OS4原型是全自主四旋翼平台, 该项目的研究 目标是设 计和 开发一 个自主 控制 四旋翼 直升 机系统。 此外, EPFL 还研究了 OS4的避障问题 , 使用 4个超声 波传感器探测障碍物、 一个 超声波传感 器测高度, 并在 M atlab /S m i u link仿真环 境下进行了 OS4 避障模 型的测 试, 设计了避障控制器、 基于 位置和速度 控制的 5 种不 同避碰方法, 并做了 相关测试 实验证 明, OS4在 仿真环
无人机载微小型SAR发展概述

无人机载微小型SAR发展概述一、概念与特点无人机载微小型SAR是一种将合成孔径雷达(Synthetic Aperture Radar)与无人机技术相结合的新型雷达系统。
合成孔径雷达是一种通过合成大量波束来实现高分辨率成像的雷达技术,其优点是具有较长探测距离、不受气象条件限制等特点。
而无人机则具有机动性强、能够获取到低空视角的优势。
将二者结合,可以实现在更低的高度上获取高分辨率、大覆盖区域的土地、海洋等目标的成像。
二、技术发展在硬件研发方面,主要涉及到无人机平台的选择与改进、SAR天线的设计和制造等。
无人机平台的选择应考虑其飞行能力、操作性、飞行稳定性等因素,同时还需要根据SAR系统的需求进行各种特定的改进和优化。
SAR天线的设计要考虑到天线重量、体积等因素,并且要保证天线的指向精度和发射/接收效率。
在算法优化方面,主要涉及到SAR信号处理、成像算法、运动补偿等。
由于无人机飞行状态的不稳定性,需要对所获得的数据进行运动补偿,以消除飞行引起的模糊效应。
同时,基于合成孔径雷达原理的信号处理和成像算法也需要进行优化,以提高成像质量和分辨率。
三、应用领域无人机载微小型SAR具有广泛的应用前景。
首先,在军事领域,无人机载微小型SAR可以用于目标探测、识别和跟踪,提供实时的地面情报,为军事行动提供支持。
其次,在灾害监测与预警领域,无人机载微小型SAR可以通过对地表的成像来获取地质、水文等信息,实现对地质灾害、洪涝等自然灾害的监测与预警。
再次,在资源勘探领域,无人机载微小型SAR可以通过对地表的高分辨率成像,实现对矿产资源、森林资源等的勘探与评估。
此外,无人机载微小型SAR还可以应用于边境巡逻、环境监测等领域。
综上所述,无人机载微小型SAR作为一种将无人机技术与合成孔径雷达技术相结合的新型雷达系统,具有潜在的应用前景。
随着硬件和算法技术的不断发展,无人机载微小型SAR的性能将会得到进一步提升,广泛的应用领域也将得到扩展。
微型无人飞机
GIT佐治亚理工学院
Vanderbilt大学
“Bug”微型机器昆虫
"微星"
"微星"的设计重量是100克,总电功耗是15瓦。它 的机身重为7克,处理/存储电子组件重量6克,照相 机/镜头总重4克。
“微星”的组成及机载电 子设备的功耗和重量
名称 电动机+螺旋桨 数据传输系统+天线 机身 电池
功耗/重量 7W/13.5g 2W/6.5g 7g 13W/44.5g
研究新型机翼,提高飞机升 阻比、增大飞机有效载荷,实现 MAV超低速、大攻角飞行。可以 通过控制,设法取代副翼等操纵 面,实现滚转、转弯等机动和实 现其他非常规机动飞行。
国内研究进展
国内微型飞行器的研究比国外晚2-3年,清华大 学、上海交通大学、南京航空航天大学等单位也 开展了对微型飞行器的研究,取得初步成果; 作为微型飞行器的支撑技术,国内微型机电系统 的发展,如微加速度计和陀螺,为微型飞行器的 发展提供了基本元器件;
MEMS气泡用于改善飞机动力学特性(F16)
麻省理工大学(MIT)基于MEMS技术的 微型喷气式发动机原理
推力=11g 涡轮前温度=1600 K 小时耗油率=16g/hr 发动机转速=1.2x106RPM 发动机重量=1g 尾喷管排气温度=970°C
五 、基本概念——1 低雷诺数空气动力学
雷诺数是流体惯性力与粘性力大小的对比,雷诺数大时, 惯性力为流体的主要表现,雷诺数小时,粘性力为流体 的主要表现 当雷诺数小于等于105时,可认为是低雷诺数范围,此时 流体的粘性力作用非常明显 低雷诺数下的机翼阻力很大,而最大升力系数很小,飞机
584
54
1
A
B
微小型无人机全姿态增稳控制系统的设计与实现
微小型无人机全姿态增稳控制系统的设计与实现作者:迟晓鹏罗卫兵霍丽霞来源:《现代电子技术》2010年第08期摘要:针对传统微小型无人机在飞行过程中存在的稳定性问题,指出影响稳定的因素。
提出一种基于三轴陀螺和倾角传感器构成全姿态增稳控制系统的设计方案,采用EWTS82三轴陀螺和SCA100T双轴传感器组成姿态增稳硬件控制,结合软件增稳控制,成功应用到某型微小型无人机上。
大量的试飞结果表明,基于三轴陀螺和倾角传感器构成的姿态增稳控制系统优于传统的测量单元,有很好的应用价值。
关键词:无人机; 三轴陀螺; 倾角传感器; 增稳控制中图分类号:TP212文献标识码:A文章编号:1004-373X(2010)08-0160-03Design and Implementation of All-attitude Stability Augmentation Control System of Miniature UAVCHI Xiao-peng, LUO Wei-bing, HUO Li-xia(Engineering College of Armed Police Force, Xi’an 710086, China)Abstract: According to the problems existing in flight process of traditional miniature UAV, the factors that affects the stability is pointed out, and a design scheme of all-attitude stability augmentation control system based on the tri-axis gyroscrope and tilt angle sensor is proposed. The hardware control system of attitude stability augmentation is comprised of EWTS82 tri-axis gvroscrope and SCA100T dual-axis sensor. It was applied to a certain type of miniature UAV successfully in combination with asoftware of stability augmentation contol. The flight test resultshows that the all-attitude stability augmentation control system based on tri-axis gyroscrope and tilt angle sensor is superior to conventional measurement units and it has a good practical value.Keywords:UAV; tri-axis gyro; tilt angle sensor; all-attitude; stalility augmentation control0 引言随着国内外反恐形势的日趋严峻和各类突发事件的频繁发生,对武警部队能否在各种复杂、危险的环境下,快速有效地完成任务,提出了更高的要求。
轻小型无人机多光谱遥感技术应用进展
摘要:随着现代化技术以及信息化手段的飞速发展,光谱传感技术得到了越来越多的重视,并且再加上各类分析软件与图像处理技术的成熟发展,无人机光谱软硬件的一体化程度以及精准度得到了极大提升,这也使其在林业、生态以及农业等多个领域得到了十分广泛的应用,由此可以看出,轻小型无人机多光谱遥感技术已经得到社会各界的重点关注。
因此,文章首先对轻小型无人机多光谱遥感系统的基本概述加以明确;其次,介绍了轻小型无人机多光谱信息获取以及数据处理;在此基础上,提出轻小型无人机多光谱遥感系统的实际应用。
关键词:轻小型无人机;多光谱遥感技术;应用进展引言多光谱遥感技术,其主要就是指采用两个以上波谱通道传感器来对地面上存在的各类物体展开同步成像的遥感技术,能够更好的将目标物体反射辐射来对各类电磁波信息进行划分,将其进一步分为多个波谱段来进行更加详细的记录接收,而能够实现多光谱遥感的传感器主要就是多光谱相机,仅仅只需要进行一次拍摄,就可以形成多样化的光谱影像。
而轻小型无人机遥感系统则属于低空遥感系统当中的关键组成部分,其具备着操作便捷、灵活性高以及成本较低等多种优势,这也使其在多个社会领域当中得到了应用。
一、轻小型无人机多光谱遥感系统的基本概述(一)无人机遥感系统在完整的轻小型无人机遥感系统当中,其主要囊括了微小型传感器、地面站系统、数据处理系统以及无人机平台等。
而其中的无人机平台,就是承载无人机本体的平台,其中涉及到了导航定位系统、传感器以及飞控等多种设备;微小型传感器则是安装在无人机平台当中,对各类遥感数据信息进行获取控制的装置,而其内部存在的控制装置,通常情况下会与飞控系统以及导航系统一同进行设计,这也使其拥有着记录拍照位置、触发控制传感器等多种功能;地面站系统,能够与飞控系统之间通过数据信息传输来展开通信,能够实现对于控制指令以及图像数据的实时交互与实时传输。
(二)无人机平台轻小型无人机的具体飞行平台,其具备着多样化的特征,存在着固定翼无人机、多旋翼无人机以及无人直升机等多种类型。
高精度小型无人机空速测量系统设计

由公式 ( ) 1 解算 出 的空速 为指示 空速 , 人机 在不 同 无
高度环境下 的大气密度 和温度 都不相 同 , 测得 的指示 空速
不能反 映实 际航 速。在得 到飞行 控 制 系统 的气压 高 度值 后, 可利用下式修正指示空速 , 解算真空速
=
空速分为真空速和指示 空速 , 过测 量无人机 飞行 时 通
值拟合 。
2 1 压 力传 感 器 .
系统选用 M tr a 司生 产 的 MP V 0 4 ooo 公 l X 5 0 G型压 力传 感器测量 系统 动压 。它 是基 于 ME MS技 术 的双 口硅 压 阻
式动压传感器 J 。其体 积小 、 精度 高 、 率小 、 功 频率 响应高 等特 点 非 常 适 用 于 小 型 无 人 机 的 飞 行 控 制 系 统 内 。
Ab t a t sr c :Ai p e s o e o h mp r n a u i g p r mee s o AV. h r cp e o h r e d i n ft e i o t t me s rn a a tr f U s a T e p n il f te UAV arp e i i ed s me s rn si t d c d T e h r wae a d s f a e o a u i g s s m r l b rt d Ai n tt e n ni e r a u g i n r u e . h a d r n ot r f me s r y t a e e a o ae . mi g a h o l a i o w n e n fn t n r lt n o d c t d arp e n y a cp e s r , h mo e e u i e rit r oa in ag r h f t g i u ci e ai f n i ae i e d a d d n mi rs u e i o g n o sl a ep lt l o i m t n s o o i s n n n o t i i p e e t d On t e b s fs l ig mir —o t l ru i c mp t gp we h r g f o n a in e s r sc lu ai g r s n e . a i o ov n co c n r l nt o u i o rs o a e o u d t n u e ac l t h s oe n t f o n p e iin T e r s h s o h t t e s se rl t e e rr i l s h n 0 5 % . h e in s se h s h g r cso . h e u h ws t a h y t m eai r s e s t a .1 v o T e d sg y t m a ih
微小型无人系统技术
微小型无人系统技术北京理工大学微小型系统研究中心李科杰一、微小型无人系统技术发展动向微小型无人系统技术的内涵是:根据无人系统特殊功能和特性,应用微机电系统(MEMS)、机器人、感知、控制等先进技术,综合集成为微小型无人系统的光机电一体化技术。
国际上的科学家、战略思想家和未来学家们认为:“五种常常重叠的技术最有可能在今后15-20年使军队发生革命性的变化。
这五种技术为:机器人技术、先进的动力与推进技术、微型化技术、移动和自适应数字网络、飞速发展的生物科学。
” 微小型无人系统就是二十世纪九十年代美国等先进工业国家开始发展的融合了这些技术的新概念装备,它不但在基础理论、设计、制造与试验技术等方面是革命性创新,而且对二十一世纪战争的模式将会带来变革性的影响。
微小型无人系统技术目前重点研究的是:微小型飞行器、微小型机器人、微小型水下无人航行器和微小型航天器等。
1.微型飞行器微型飞行器(MAV)的概念是由美国于九十年代最先提出的,并进行了可行性论证。
研制出的微型飞行器特征是:最大尺寸为15cm以下,重数百克以下,航程大于10km,最高时速达80km/h,最高飞行高度可达150m。
它还应有导航及通信能力,可用手掷或飞机部署它们,具有侦察成像、电磁干扰等作战效能,一次性使用的微型飞行器的价格计划在1000美元以下。
目前美国DARPA有十余项微型飞行器研究计划在进行,包括固定翼、旋翼、和扑翼式微型飞行器。
在阿富汗战场上美国使用了微型飞行器,这种微型飞行器名为“微星”,海军陆战队士兵可以通过便携式电脑的画面,操纵“微星”侦察机,可侦察前方5km的情况。
作为微小型飞行器的一个新概念,“仿昆虫机器人”九十年代初被提出。
它是基于对昆虫运动机理的分析,按照一种新的设计思想去设计的。
美国投资10亿多美元研究如何利用昆虫侦察,现正在研究用遥控器控制昆虫飞行。
如果在昆虫身上装上微型摄像机,则不仅可实现侦察,也可对人无法进入的地方进行探测。
无人机载微小型SAR发展概述

无人机载微小型SAR发展概述作者:李秋菊来源:《数字技术与应用》2019年第06期摘要:无人机载微小型SAR因其全天候全天时、零伤亡、机动灵活和低成本的特点,受到广泛关注。
本文在概述无人机载微小型SAR技术的基础上,介绍了无人机载微小型SAR技术发展概况,阐述了国内外微小型SAR的典型型号、主要性能指标、应用及装备情况。
并根据国内外发展概况,对无人机载微小型SAR技术发展趋势进行了展望。
关键词:合成孔径雷达;微小型SAR;无人机载SAR;无人机中图分类号:V279 文献标识码:A 文章编号:1007-9416(2019)06-0197-030 引言伴随着航空、电子、信息及材料等技术的发展,无人机技术得到长足进度,无人机作为载机平台,因其“零伤亡”和机动灵活的特性,在军事、民用方面均发挥着重要的作用。
无人机载SAR 整合了无人飞行平台和合成孔径成像设备的优势,使无人机系统具备了全天候全天时主动探测的能力;同时SAR的高分辨率、大测绘带宽的优点,使无人机系统具有更更好的工作效率,便于应用,降低了成本;SAR的远探测距离、侧向观测等特点,进一步增强了无人机远离目标进行探测、生存能力。
因此,对于无人机载SAR的研究受到了越来越多的关注。
同时随着无人机载SAR应用需求的增加,SAR技术也得到了迅猛发展。
新体制、新器件、新方法和新型复合材料等先进技术的采用,使得无人机载SAR越来越小型化,有的重量更是不足1kg;模式和功能越来越多样化,从条带/聚束成像扩展至GMTI、广域搜索和目标跟踪、ISAR成像、干涉SAR成像和多极化成像等;分辨率越来越低,甚至达到厘米级,可以位战场决策提供更多准确可到的情报信息,也为后期的目标识别、自动目标检测提供更多的目标特性。
本文对国内外无人机载微小型SAR技术的现状及相关应用进行概述,给出主要的性能指标,并对无人机载微小型SAR的发展趋势进行了探讨。
1 无人机载微小型SAR技术现状1.1 国外无人机载微小型SAR进入21世纪以来,世界上许多国家投入力量研制无人机载SAR,体积小、重量轻、功耗低的微小型SAR系统更是研究的热点。
微小型机器人
美国DARPA
– 微小型武器系统最大的支持者 – 共设7个处: – 国防技术处
– – – – – – 特殊项目处 信息系统处 信息技术处 战术技术处 微系统技术处 先进技术处
嵌入式技术与微小型机器人
• 国外专业实验室
美国iROBOT实验室是在美国处于领先地位的 微小型仿生技术研究开发重点实验室之一。 重点研究开发面向微小型仿生机器人的高机 动性、人机交互、多机器人协作算法、人工智能技 术等核心技术,并也支持研究开发具有军事应用前 景的扫雷、侦察、监视及处理对人体有毒害垃圾等 系统样机。
嵌入式技术与微小型机器人
(3)、嵌入式微处理器(Micro Processor Unit)
2)近距离电子干扰
嵌入式技术与微小型机器人
1)侦察
2)近距离监测
嵌入式技术与微小型机器人
2、微小型武器相关研究计划
• • • • • • 美国STTR计划机器人“龙虾” 美国水下自主扫雷“机器蟹”(长56厘米,重10.4千克,承载 3.17千克,由近海登陆艇控制) 美国海军机器人章鱼(由潜艇或水面舰船控制发射, 用于 浅海水域作战) 德国、英国以及挪威都在研究体积小、重量轻、成本低,并且 可以大量携带的一次性使用微小型扫雷武器 美国DARPA正在进一步资助这方面研究,计划进一步研究样机, 在今后的5至6年内装备部队 英国皇家海军正在开展仿生机器鱼推进机理研究
嵌入式技术与微小型机器人
王田苗
北京航空航天大学 机器人研究所
嵌入式技术与微小型机器人
人类长期探索生物学、仿生学、机械材料、智能 控制等方面深刻机理。 幻象希望研究出各种智能机器人,……
象人一样在家照看老人、护理病人?与世界明星 足球队一起踢球? 象蛇一样爬行在狭窄管道进行维修,穿越在废墟 中寻找幸存生命? 象飞鸟一样翱翔天空,象小蜜蜂一样观测花朵? 象鱼类一样高效机动游动?
面向低慢小无人机的SKDC-LDS技术

电子信息对抗技术Electronic Information Warfare Technology2021,36(3)㊀㊀中图分类号:V279;TN97㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀文章编号:1674-2230(2021)03-0072-05收稿日期:2020-07-24;修回日期:2020-08-25作者简介:王智显(1981 ),男,硕士,高级工程师;张雁平(1962 ),男,研究员;詹雨飞(1999 ),女,电子科技大学学生,主要研究方向为通信工程㊂面向低慢小无人机的SKDC -LDS 技术王智显1,张雁平1,詹雨飞2(1.西南电子设备研究所,成都610036;2.电子科技大学,成都610054)摘要:反无人机技术的发展很大程度上与无人机技术扩散带来的威胁有关,特别是在平时和战时环境中的低慢小廉价无人机㊂面对日益迫切的低慢小无人机威胁需求,全面分析威胁问题产生的根源和反制难点,系统总结国内外低慢小无人机探测和反制系统的产品和技术发展现状,提出架构统一㊁功能扩展㊁分层防御的SKDC -LDS (Soft -Kill Distributed Coordination LayerDefence System )系统解决方案,并分析定区侦察㊁定区干扰等急需突破的关键技术㊂关键词:低慢小无人机;SKDC -LDS ;定区侦察;定区干扰DOI :10.3969/j.issn.1674-2230.2021.03.015The Soft -Kill Distributed Coordination Layer Defense System Technology for the Low -Slow -Small DroneWANG Zhixian 1,ZHANG Yanping 1,ZHAN Yufei 2(1.Southwest China Research Institute of Electronic Equipment,Chengdu 610036,China;2.University of Electronic Science and Technology of China,Chengdu 610054,China)Abstract :The rise of C -UAS technology is largely tied to the novel threats posed by the expan-ding use of drones -particularly Low -Slow -Small (LLS)inexpensive systems -in civilian andwartime environments.With the growing demand for LLS drone threats,the causes of the threatand difficulties of countermeasures are comprehensively analyzed and current status of productand technology development of LLS drone detection and countermeasures system is systematically summarized.The system solution of Soft -Kill Distributed Coordination Layer Defense(SKDC -LDC)is put forward.The key technologies needed to be broken through urgently are analyzed,such as area -specific reconnaissance and area -specific jamming.Key words :low slow small drone;SKDC -LDS(Soft -Kill Distributed Coordination Layer De-fence System);area -specific reconnaissance;area -specific jamming1㊀引言随着全球无人机市场的蓬勃发展,微小型无人机由于具有价格低廉㊁可获取性强㊁改装难度小㊁平台与载荷发展成熟㊁使用方便等特点,在侦察㊁监视㊁摄影等领域广泛应用㊂同时,不法分子利用微小型无人机对重要设施㊁敏感区域进行蓄意窥探㊁袭击,对重点人员㊁重要活动实施恐怖袭击,对民航安全造成很大威胁等㊂伴随着无人机产品与技术的快速发展,无人机威胁呈现出渐进式㊁逐步升级的发展态势㊂典型无人机威胁事件包括:2015年1月,一架小型无人机失控坠入白宫,引发白宫安全恐慌;27电子信息对抗技术㊃第36卷2021年5月第3期王智显,张雁平,詹雨飞面向低慢小无人机的SKDC-LDS技术2015年2月24日晚,至少5架小型无人机飞越美国驻法大使馆㊁埃菲尔铁塔㊁协和广场等地; 2015年4月,一架小型无人机坠落至日本首相官邸屋顶㊂2018年8月5日,委内瑞拉总统马杜罗在首都加拉加斯进行国民卫队成立81周年活动时,遭到小型无人机暗杀[5]㊂暗杀行动共动用了3架携带炸药的无人机,3架均成功引爆㊂爆炸造成至少7名国民警卫队士兵受伤,所幸马杜罗未受伤㊂这是世界首次使用小型无人机针对一国元首进行暗杀活动㊂2019年9月,沙特阿美石油公司的设施遭到18架无人机和若干枚巡航导弹袭击并引发大火,导致两处石油设施关闭,沙特的日石油产量减少了约50%㊂在民航安全方面,据美国巴德学院公布的一组统计数据,自2013年12月至2015年9月期间,无人机和遥控飞机与民航共发生了327起危险接近事件,其中28次导致航班为了避免与无人机相撞而改变航线㊂2016年5月,成都双流机场连日发现小型无人机在机场附近空域 黑飞 [4],造成55个航班无法正常起降㊂上述威胁事件的共同特点是均为低慢小无人机导致的㊂这些威胁事件一般分为两大类:一类是无意闯入 禁飞区 的,如影响民航安全的无人机;另一类则是蓄意窥探㊁预谋监视㊁有意攻击的,这一类的威胁尤其防不胜防㊂微小型无人机的目标特性如表1所示,低小慢无人机是指表1中的第Ⅲ类微小型无人机,具有飞行高度低㊁目标尺寸小㊁飞行速度慢三大特点㊂为什么微小型无人机会对机场㊁油库㊁城市基础设施等造成如此严重的影响?主要原因在于,从军用角度来看,传统防空系统的主要作战对象是大型快速运动的目标,很多传统的防空系统无法对微小型无人机进行快速有效地发现㊁跟踪和反制;从民用角度来看,一方面,全球范围内有数以百万未登记注册的微小型无人机使用者,每架微小型无人机又不需要装载应答机,因此现有的空中交通管制系统无法对 禁空 区域出现的微小型无人机进行探测㊁识别和跟踪;另一方面,也没有专门的微小型无人机有效探测与快速反制技术和产品㊂表1㊀无人机目标特性[3]目标特性无人机种类大型Ⅰ中型(集群)Ⅱ微小型(蜂群)Ⅲ尺寸/m>103-10<3总重/kg>60025-600<25载重0.2-2t10-200kg<10kg 速度/Ma0.6-0.80.3-0.8<0.3高度/km6-301-9<6航程/km>1000100-1000<100航时/h6-403-120.5-2材质金属㊁复合材料金属㊁复合材料碳纤维㊁复合材料动力涡扇㊁涡喷㊁活塞螺旋桨小型涡喷㊁活塞螺旋桨电动螺旋桨RCS/m2非隐身,隐身设计0.01雷达红外抑制设计0.01-0.1目标尺寸小0.001-0.01红外辐射百瓦级10-20W/sr0.04-0.5W/sr 针对上述问题,不少国家和地区相继颁布了无人机管理办法,能够在一定程度上减少 黑飞 无人机事件的发生㊂但是,出台的政策和制度只能对于一般的微小型无人机玩家或者无意中闯入 禁空 区域的无人机操控者有约束,对于像袭击沙特油田基础设施的袭击者或者蓄意利用微小型无人机进行战略要地㊁城市机场㊁油田大坝㊁岛礁港口等基础设施的恐怖组织等目前并没有很好的应对手段,因此很有必要研究面向低慢小无人机的快速高效探测与反制技术㊂2 难点分析㊀㊀面对低慢小无人机威胁,各国军用和民用研究机构和用户一直难以找到高效快速低成本应对的办法㊂对军用来讲,陆军面临的威胁最有代表性㊂美国陆军2017年发布了‘美国陆军技术出版物(ATP)3-01.81:反无人机系统技术手册“[1],该手册旨在协助训练和教育各陆军机动部队运用反无人机战术㊁技术和流程(TTP),一定程度上解决了在传统的防空系统中如何被动安全地处理微小型无人机的攻击,但是仍然没有主动有效地解决37王智显,张雁平,詹雨飞面向低慢小无人机的SKDC-LDS技术投稿邮箱:dzxxdkjs@微小型无人机的防御问题㊂对民用航空来讲,小型无人机体型小巧且噪音极低,接近地面并且缓慢地移动或者盘旋,所以很难被发现或跟踪㊂即使被发现,如何击败小型无人机也存在一些问题㊂例如,没有击中目标的动能武器或撞击地面的碎片有造成附带毁伤的危险㊂此外还有成本问题,尤其是当对手使用大量相对廉价的无人机时㊂目前,绝大部分对低慢小无人机探测与反制技术都是从其他技术领域借用过来的,这就存在这些技术在反无领域的技术适应性㊁环境适应性㊁安全性㊁低附带损伤性和高性价比等问题㊂对于野外场景,主要存在以下难点:1)远距发现跟踪难链路信号功率小,分布带宽大,频谱监测的远距离发现难;飞行速度慢甚至会悬停,基于多普勒检测的雷达发现难㊁稳定航迹跟踪难;光电探测的作用距离近,视场小,多目标能力弱㊂同时,由于低空飞行甚至贴地飞行,受视距限制,发现目标的时候距离已经非常近了;且由于视距遮挡原因很难侦收上行链路㊂2)无人机目标识别难电磁散射方面,RCS小,多普勒微动特征弱,基于雷达回波识别难;基于时频等多维统计参数识别又难以满足宽频带实时性要求㊂3)高效反制难电子干扰方面,侦收的是下行信号,但上下行链路可能位于不同的频段㊁采用不同的波形,因此基于上行信号的高效干扰难实现;HPM硬毁伤方面,HPM尚未投入实战,效能未完全见底,且稳定有效毁伤的作用距离较近;激光武器方面,虽然相对成熟,但有效攻击时间较长,同时多目标能力差;火箭弹等动能武器采用 大炮打蚊子 的方式实际效果较差,且附带损伤大;网捕技术还很不成熟㊂对于城市环境,除了野外场景的难点外,由于城市遮挡㊁人员密集㊁多径效应㊁电磁环境复杂等特点,还会叠加以下难点:1)连续稳定跟踪难如前所述,在克服相关野外场景的技术难点后,可以实现在一定开阔区域内对低慢小无人机的连续稳定跟踪,但是由于城市遮挡问题,通常情况下无人机对象的运动区域是不连续的开阔区域,因此造成无人机的连续稳定跟踪难上加难㊂同时,由于城市对电磁辐射的控制,雷达探测手段也会受到很大的限制㊂2)城市复杂电磁环境下的无人机目标识别难由于城市环境有众多的民用ISM设备,再加上城市众多建筑物导致的多径效应,导致如何从复杂电磁环境和众多的民用电子信号中识别出无人机信号并进行高效反制是一个很大的难点㊂同时,城市环境中的人员㊁车辆㊁飞鸟㊁风筝等运动目标也给无人机目标的准确识别带来很大难题㊂3)低附带损伤控制难由于城市环境人员密集㊁建筑物众多,无人机反制必须严格控制附带损伤㊂电子干扰必须考虑不能影响周围的ISM频段设备,不能影响民用导航设备的使用等;HPM设备由于可能会对民用电子设备造成毁伤,因此需慎重使用;激光武器由于通过烧毁无人机器件/材料的方式在无人机降落后可能会造成火灾等也需慎重使用;动能武器均不适合在城市环境使用㊂3 国内外研究现状㊀㊀针对日益迫切的反无人机威胁需求与上述难点,国内外开展了相关技术研究㊁产品研制和实战使用㊂据美国Bard学院无人机研究中心的2019年‘反无人机系统“报告对新闻㊁营销材料及其他公开信息建立的反无人机数据库的不完全统计[2],全球目前共有约537个反无产品㊁涉及277个制造商和38个国家;其中,无人机探测系统175个,无人机拒止系统214个,探测和拒止兼备的系统有138个㊂尽管已经有这么多的反无人机产品,但是反无人机系统的技术挑战尚未完全克服㊂通过对国内外的反无人机探测㊁定位与反制技术进行全面的分析,可以得出如表2和表3所示的各种技术优缺点对比㊂从表2和表3可以看出,无人机探测与定位技术总体上比反制技术更为成熟;任何一种探测㊁定位㊁反制技术都有它的应用局限性,单靠一种技术手段很难实现对低慢小无人机的快速发现㊁稳定跟踪和高效处置;相对而言,无源定位㊁频谱监测与链路干扰㊁导航干扰47电子信息对抗技术·第36卷2021年5月第3期王智显,张雁平,詹雨飞面向低慢小无人机的SKDC-LDS技术等电子战手段具有发现早㊁处置快㊁全程使用㊁低附带损伤相对较小等特点㊂表2㊀无人机探测与定位技术对比序号名称优缺点对比成本典型精度对飞手定位技术成熟度多目标能力全天候电磁辐射发现时间应用边界1雷达高数十米否成熟较强是有数秒城市环境辐射受限2外辐射源探测较高数百米否较成熟较强是否数秒要有环境照射信号3无源定位低0.1%R能成熟强是否实时4频谱监测低3ʎ能成熟强是否实时靶机必须辐射信号5光电探测较低数米否成熟弱白天晴天否数秒必须白天无雾无云无雨红外探测较低-否较成熟弱夜晚晴天否数秒热信号特征明显声探测低5ʎ否较成熟弱非雨天否数秒声音信号特征明显表3㊀无人机反制技术对比序号名称优缺点对比成本精度附带损伤技术成熟度对集群目标全天候反制时间应用边界1高炮高低大高差是分钟2防空导弹高高大高差是分钟主要反制高速大目标3链路干扰低高小高好是实时4导航干扰低高小高好是实时5链路接管低高最小很低差是较长必须有链路信号收发6网捕低较高小高差是不确定目标低速㊁几乎不机动7高功率微波高高较小较高好是实时载机上要有电子系统8高能激光高高较小较高差否数十秒与机身材料和机动有关9无人机撞击低低较小较低差是不确定撞击无人机的飞行速度和机动性要优于靶机㊀㊀虽然各种无人机探测与反制产品不断涌现,但实战条件下的真正效能存在不托底的问题,国内以国防科技创新特区主办的 无形截击 比赛最具代表性,该比赛重点对贴近实战条件下的反无人机产品和技术进行了系统性综合测试,期望有效考察反无人机系统的实际技术性能和作战能力㊂比赛结果表明,没有万能的无人机探测㊁定位与反制技术,也没有攻不破的防御圈㊂综合上述分析,目前来看,尽管国内外反无产品种类繁多,但是并未从根本上解决低慢小无人机的威胁问题,没有万能的低慢小无人机探测技术,也没有万能的低慢小无人机反制技术㊂为了提供更稳健的探测㊁跟踪和识别能力,很多系统需集成各种不同种类的传感器;为了提高拦截成功57王智显,张雁平,詹雨飞面向低慢小无人机的SKDC -LDS 技术投稿邮箱:dzxxdkjs@率,很多反无系统需组合使用各种拦截手段㊂4㊀系统解决方案与关键技术4.1㊀总体方案针对日益迫切的低慢小无人机威胁需求,综合考虑野外场景和城市环境应用,应该构建架构统一㊁功能可扩展㊁城市野外通用㊁性能可持续提升的系统解决方案㊂结合前述难点分析和国内外研究情况,从完整杀伤链的角度考虑,本文提出SKDC -LDS(Soft -Kill Distributed Coordination Lay-er Defence System)系统解决方案,即以电子战软杀伤链为核心的分布式协同分层防御系统㊂图1㊀远中近结合的SKDC -LDS 防御示意图远中近结合的SKDC -LDS 防御示意图如图1所示,SKDC -LDS 防御各技术手段能力范围图如图2所示㊂图2中表示对低慢小无人机的各种低成本反制技术的作用距离范围,表示对低慢小无人机的各种低成本探测技术的作用距离范围,表示成本允许显著上升情况传统防空系统中各种探测反制技术的作用距离范围㊂基于频谱监测㊁无源定位㊁非协同探测㊁链路干扰㊁导航干扰等电子战技术的发现早㊁处置快㊁全程使用㊁低附带损伤相对较小等特点,建立以电子战软杀伤链为核心的远中近三层分层防御系统,各层的功能描述如下:远区和中区通过电子战的频谱监测㊁非协同探测与无源定位技术早发现㊁早识别目标并引导雷达精跟踪,同步采用定向波束电子干扰手段对目标进行电子攻击,部分目标可能由于干扰而坠落,其他目标由于干扰可能会悬停或显著减速,此时再根据这些目标的威胁等级以及与传统防空系统的连接情况,视情采用传统防空武器对目标进行攻击;近区仍然持续通过电子战的频谱监测㊁非协同探测与无源定位技术对于 漏网 的目标进行稳定跟踪,持续通过电子干扰手段夺取无人机的控制权,并采用全向波束干扰构建全空域电子防御 金钟罩 ,迫使无人机无法采用无线电进行控制或导航㊁将无人机的运动速度进一步降低,同时根据应用场景和反制技术成熟度的不同采用高功率微波武器㊁激光武器等有较大附带损伤的手段㊁网捕等附带损伤很小的手段㊁链路接管等几乎无附带损伤的手段㊂图2㊀SKDC -LDS 防御各技术手段能力范围图同时,SKDC -LDS 防御的系统架构是开放与可扩展的,一方面可以方便地接入各种探测和反制技术手段,并支持数据存储和人工智能各种技术的学习训练;另一方面,也留有与传统防空系统的接口,可快速方便地与其连接㊂根据目标所处的不同防御层级和目标威胁等级㊁目标数量,SK-DC -LDS 防御的工作流程进行动态自主地采用最佳处理流程㊂结合无人值守系统的发展要求,SKDC -LDS 能够智能融合多种感知手段㊁自主选择各种反制手段,具备 目标发现->定位->跟踪->识别->引导->实时频谱监测->干扰->打击->效能评估 全链条作战任务㊂根据野外防空㊁城市复杂环境等不同的应用场景,SKDC -LDS 可以自动地裁剪各种探测和反制手段,并针对不同的场景自动地选取最佳处理流程㊂4.2㊀需突破的关键技术基于上述总体方案,结合已有其他领域的成熟技术,要实现对低慢小无人机的高效反制,需重点突破以下 增量 关键技术:(1)定区侦察定位针对复杂电磁环境,研究对电子信号的分布式定区侦察技术,达到对很小区域内的信号的逐一扫描与精确侦察,更进一步实现对无人机和飞手的频谱监测㊁无源侦察定位㊂(下转第104页)67赵㊀艳,刘㊀莉,马㊀丁,杨元安频率合成器自动测试系统的设计与实现投稿邮箱:dzxxdkjs@针对这种情况,在本测试系统中,我们开发了仪器自动识别与控制的功能,使得软件的通用性和可维护性大大提高㊂其原理如下:1)搜索㊂搜索总线上所有的测试资源,获取可用的测试资源列表,包括仪器等的地址㊁型号等信息㊂2)匹配㊂按照搜索出来的测试仪器型号,逐个与测试配置文件中的仪器型号比较,如果一致,则匹配成功,找到可用的仪器㊂3)控制㊂匹配成功后,可以对仪器进行控制㊂测试软件中底层仪器控制通过调用VISA库来实现㊂但是为了方便系统后续维护升级,测试系统中将控制命令按功能进行了二次封装㊂这样调用时,只需关心实现的功能,不用关心具体的型号及底层控制指令,极大地方便了测试系统的维护和升级㊂4㊀结束语㊀㊀本文根据某课题频率合成器测试需求,设计并实现了自动测试系统㊂该测试系统主要采用的是台式仪器与通用控制总线GPIB,未来可以扩展功能,采用PXI总线和模块化仪器设备,降低测试成本,提高测试工作的可靠性㊂参考文献:[1]㊀颜盾.面向卫星导航射频芯片的频率合成器的设计与实现[D].北京:北京邮电大学,2012. [2]㊀李行善,左毅,孙杰.自动测试系统集成技术[M].北京:电子工业出版社,2004.[3]㊀王坤,伍磊.基于LabVIEW的航空装备通用测试系统设计[J].电子技术,2015(7):58-60. [4]㊀靳取,方晖,柏业超.基于GPIB的数字电路自动测试系统研究[J].南京大学学报(自然科学),2016,52(6):1134-1137.[5]㊀严乐,司斌,张从霞.基于ATML标准的空空导弹ATS标准化描述[J].测控技术,2016,35(2):152-156.[6]㊀程立敏.基于CH341的USB总线数据采集系统设计[J].科技视界,2016(25):225-227.(上接第76页)㊀㊀(2)智能融合识别与反制决策针对无人值守,多传感器信息的智能融合和无人机目标的智能识别;实现将 人在回路 的各种人工决策转化为机器自动决策,需要研究智能反制决策技术㊂(3)定区干扰针对城市各种IMS设备与民用导航的广泛使用给电子干扰技术带来的挑战,研究向特定区域精确投送电磁能量的定区干扰技术,将干扰信号能量控制在很小的一块区域内㊁甚至实现 定点 干扰,以便将低附带损伤控制到最小㊂5㊀结束语㊀㊀面对日益迫切的低慢小无人机威胁,本文全面分析了威胁问题产生的根源和难点,系统总结了国内外低慢小无人机探测和反制的系统㊁产品㊁技术发展现状,提出了军民通用㊁架构统一㊁功能可扩展㊁性能可持续提升的SKDC-LDS系统解决方案,并给出了系统解决方案的应用视图和功能视图㊂最后,基于SKDC-LDS系统解决方案,分析了定区侦察㊁智能融合与识别㊁定区干扰等未来需解决的关键技术㊂参考文献:[1]㊀Headquarter.Counter-Unmanned Aircarft SystemTechniques[R].USA:Department of the Army,2017.[2]㊀MICHEL A H.Counter-Drone System[R].USA:BardCollege,2019.[3]㊀侯凯宇.第二届未来空战与人工智能高端论坛文集[C].杭州:国防科技专业组,2019.[4]㊀李秀江. 黑飞 无人机逼停双流机场55个航班[N].华西都市报,2016-05-30(2).[5]㊀杨一帆.马杜罗遭 刺杀 [N].澎湃新闻,2018-08-05(3).401。
一种微小型无人船控制系统设计及航向控制方法研究

一种微小型无人船控制系统设计及航向控制方法研究张浩昱;刘涛【摘要】无人船在保护海洋环境和开发海洋资源方面具有广泛的应用前景和市场价值;微型无人船研制成本低、机动灵活、携带方便且易于开展实验,相比常规水面无人平台有明显优势;微小型无人船不仅可以用于海洋环境监测,也可以作为海上通信中继平台,在军事应用领域也有其潜在应用价值;文章设计了一种基于ARM的微小型无人船控制系统,同时进行了详细的控制系统硬件设计和软件设计,并通过水池实验结果验证了该控制系统的有效性和实用性;此外,针对无人船航行过程中存在风浪流混合干扰的问题,结合模糊控制技术和传统的PID控制技术,提出了一种模糊PD控制算法,实现了PD控制参数的在线自适应优化调整,进行了相应的水池试验并与传统PD控制算法进行了对比分析.【期刊名称】《计算机测量与控制》【年(卷),期】2017(025)001【总页数】4页(P88-90,93)【关键词】ARM;无人船控制;航向控制;模糊PD控制【作者】张浩昱;刘涛【作者单位】哈尔滨工程大学自动化学院,哈尔滨 150001;哈尔滨工程大学自动化学院,哈尔滨 150001【正文语种】中文【中图分类】TP3无人船是一种新型的海洋运载平台,在民用和军事领域具有极其广泛的应用前景,可以进行海洋环境监测、海洋气象预报、通信中继、领海监视等工作。
微型无人船研制成本低、机动灵活、携带方便且易于开展实验,相比常规水面无人平台有明显优势。
其控制系统多采用模块化结构设计,易于快速集成,搭载不同的传感器就可以完成不同的工作任务。
随着无人水上平台的推广以及相关定位、导航与控制技术的快速发展,越来越多的无人水上自主平台将应用于海洋监测领域[1]。
美国和以色列在无人船的研究方面一直处于领先地位。
世界其它国家也积极地开展了无人船的研究。
美国研制的斯巴达侦察兵无人船,采用的是模块化的结构设计,是一艘典型的高航速、高机动性、模块化的无人船。
以色列的保护者号无人船,如图2所示,是由以色列拉斐尔武器发展局所开发的,船长9米,为刚性充气艇,采用喷水推进,最大航速超过30节。
旋翼微小型无人机地面站系统的设计与实现

V0 . 6 I3
・
计
算
机
工
程
21 0 0年 1 2月
De e be 0 0 cm r2 1
No 2 . 3
Co pu e g ne rn m tr En i e i g
工程 J 技术 与 实现 ・ 立用
文章编号: o—32( l) —04—0 l 0 482 o2 23 3 0 o 3
文献 标识码: A
中图分类号: 31 T 9 P
旋 翼 微 小 型 无 人 机 地 面 站 系 统 的设 计 与 实 现
冯 震 , 李怀兵 , 丑武胜
( L 航 空 航 天 大 学 机 器 人 研 究 所 ,北 京 10 9 ) J京 0 1 1
摘 要 : 对 旋翼 机 的控 制 复 杂性 , 计 一套 面 向 旋 翼 式微 小 型 无 人 机 的 地 面控 制 站 系统 。 利 用 该 系统 可 进 行 航 迹 设 定 和 任 务 规 划 , 储 和 回 针 设 存
设 计 是 基 于 VC ++ 6 0和 ra X . .  ̄ p 5 0完 4 成 的。
() 1 电子 地 图主 视 图
电子地图主视图主要用 来显示旋翼
机 的航 迹 和 当 前 位 置 。航 迹 的 显 示 和 实 现 是 一 个 较 为 复 杂 的 过 程 , 文 所 采 用 本
的方法是 : 分析传 回的遥 测数据 , 中提 从 取出飞机 的位 置信 息 ( 飞机所处 的经度
[ btat A src]A ru dcnrl tt ni d s n da d i lme td t elwi h o t l o lxt fu ma n dmiitr ei pe. Th go n o to ai s ei e n mpe ne o da t tecn r mpe i o n n e nauehl o tr s o g h o c y c e sse cnb sdt o to n n e naueh lo tr e tl v r h oio ytm yjyt k , tr n eurnete rc s f h ytm a eue ocnrl ma ndmiitr ei pe moeyo e eh r nsse b si s soeadrc re c ak e u c r t z o c h t Ot
探讨小型无人机的机械设计

探讨小型无人机的机械设计摘要:在科学技术蓬勃发展的背景下,无人机技术在持续发展中也取得了进步,成功设计开发出多类型的无人机产品,无人机在土地测绘、航海、工农业等领域均有广泛应用。
而设计工作者并没有因此而懈怠,将更多的新假想融合到无人机设计工作,以进一步丰富其功能,实际使用中创造出更多的效益。
本课题主要从硬件的机械设计方面入手探究小型无人机的设计思路,主要围绕一种可折叠式小型无人机作为研究对象,着重研究其硬件设计和优化方案,并对无人机机械设计的优化方向做出合理预测,以供同行参考学习。
关键词:小型无人机;可折叠式;机械设计;硬件优化引言小型无人机有造价及运行成本“双低”、机动性强、设备搭载多样化等诸多优势,故而其在很多很多领域的应用情况得到了广泛关注,能执行测绘,勘探、灾害监测、航拍等诸多任务,尤其时人们无法抵达的遥远或危险区域内使用更是体现出很大价值。
而关于小型无人机的机械设计始终是产品设计领域中的重点,也是难点,本文就此展开研究。
1 小型无人机的机械设计理念分析在业内,小型无人机又被叫做空中机器人,其具体是指小型自主化飞行无人机系统,主要由软件、硬件系统两大部分构成,其功能影响着无人机性能发挥程度及现场应用效果。
怎样由硬件系统层面上进行设计优化是无人机在实现小型化历程上必须处理的一个现实问题。
小型无人机产品的硬件机械设计理念应从如下几点进行分析论述:无人机全机的体积;生产材料的自重;材料的综合力学性能;全机现场操作使用的便捷性;全机的自主化处理能力;机身构造对客观环境条件体现出的适应能力;后期管理实践中维修的便捷程度。
怎样设计制造出自量轻盈、形体微小、操作过程简单、带载能力高、集成度强、对现场作战环境要求低及适应能力处于较高水平的小型无人机设备,是新时期下相关设计人员职业生涯中孜孜不倦追求实现的共同目标[1]。
关于小型无人机本体在使用范畴及用途方面涉及的机械设计理念,是要在确保其发挥最基本飞行功能的基础上,对多种环境条件表现出较高的普适性,进而执行更多任务,体现出更大的应用价值。
毕业设计论文——基于模糊PID算法的小型四旋翼无人飞行器控制系统设计
摘要四旋翼飞行器是一种四螺旋桨驱动的、可垂直起降的飞行器,这种结构被广泛用于微小型无人飞行器的设计,可以应用到航拍、考古、边境巡逻、反恐侦查等多个领域,具有重要的军用和民用价值。
四旋翼飞行器同时也具有欠驱动、多变量、强耦合、非线性和不确定等复杂特性,对其建模和控制是当今控制领域的难点和热点话题。
本次设计对小型四旋翼无人直升机的研究现状进行了细致、广泛的调研,综述了其主要分类、研究领域、关键技术和应用前景,然后针对圆点博士的四旋翼飞行器实际对象,对其建模方法和控制方案进行了初步的研究。
首先,针对四旋翼飞行器的动力学特性,根据欧拉定理以及牛顿定律建立四旋翼无人直升机的动力学模型,并且考虑了空气阻力、转动力矩对于桨叶的影响,建立了四旋翼飞行器的物理模型;根据实验数据和反复推算,建立系统的仿真状态方程;在Matlab环境下搭建了四旋翼飞行器的非线性模型。
选取四旋翼飞行器的姿态角作为控制对象,借助Matlab模糊工具箱设计了模糊PID控制器并依据专家经验编辑了相应的模糊规则;通过仿真和实时控制验证了控制方案的有效性,并在此控制方案下采集到了输入输出数据;利用单片机编写模糊PID算法控制程序,实现对圆点博士四旋翼飞行器实物的姿态控制。
本设计同时进行了Matlab仿真和实物控制设计,利用模糊PID算法,稳定有效的对四旋翼飞行器的姿态进行了控制。
关键词:四旋翼飞行器;模糊PID;姿态控制ⅠAbstractQuadrotor UA V is a four propeller driven, vertical take-off and landing aircraft, this structure is widely used in micro mini unmanned aerial vehicle design and can be applied to multiple areas of aerial, archaeology, border patrol, anti-terrorism investigation, has important military and civil value.Quadrotor UA V is a complicated characteristic of the complicated characteristics such as the less drive, the multi variable, the strong coupling, the nonlinear and the uncertainty, and the difficulty and the hot topic in the control field.Research status of the design of small quadrotor UA V were detailed and extensive research, summarized the main classification, research areas, key technology and application prospect of and according to Dr. dot quadrotor actual object, the modeling method and control scheme were preliminary study.First, for the dynamic characteristics of quadrotor UA V, dynamic model of quadrotor UA V is established according to the theorem of Euler and Newton's laws, and consider the air resistance and rotation torque for the effects of blade, the establishment of the physical model of the quadrotor UA V; root according to experimental data and repeated calculation, the establishment of system simulation equation of state; under the MATLAB environment built the nonlinear model of the quadrotor UA V Select the attitude of the quadrotor angle as the control object, with the help of matlab fuzzy toolbox to design the fuzzy PID controller and according to experience of experts to edit the corresponding fuzzy rules; through the simulation and real-time control verify the effectiveness of the control scheme, and this control scheme under the collection to the data input and output; written by SCM fuzzy PID control algorithm, dots, Quad rotor UA V real attitude control. The design of the Matlab simulation and the physical control design, the use of fuzzy PID algorithm, the stability of the four rotor aircraft attitude control.Keywords:Quadrotor UA V;F uzzy PID;Attitude controlⅡ目录摘要(中文) (Ⅰ)摘要(英文) (Ⅱ)第一章概述 (1)1.1 课题背景及意义 (1)1.2 四旋翼飞行器的研究现状 (2)1.3 四旋翼飞行器的关键技术 (5)1.3.1 数学模型 (6)1.3.2 控制算法 (6)1.3.3 电子技术 (6)1.3.4 动力与能源问题 (6)1.4 本文主要内容 (6)1.5本章小结 (7)第二章四旋翼飞行器的运动原理及数学模型 (7)2.1四旋翼飞行器简介 (7)2.2 四旋翼飞行器的运动原理 (8)2.2.1 四旋翼飞行器高度控制 (8)2.2.2 四旋翼飞行器俯仰角控制 (9)2.2.3 四旋翼飞行器横滚角控制 (9)2.2.4 四旋翼飞行器偏航角控制 (10)2.3四旋翼飞行器的数学模型 (11)2.3.1坐标系建立 (11)2.3.2基于牛顿-欧拉公式的四旋翼飞行器动力学模型 (12)2.4 本章小结 (15)第三章四旋翼飞行器姿态控制算法研究 (15)3.1模糊PID控制原理 (15)3.2 姿态稳定回路的模糊PID控制器设计 (16)3.2.1 构建模糊PID控制器步骤 (17)3.2.2 基于Matlab的姿态角控制算法的仿真 (22)3.3 本章小结 (25)第四章四旋翼飞行器飞行控制系统软件设计 (25)4.1 模糊PID控制算法流程图 (25)4.2 系统实验及结果分析 (26)4.3 本章小结 (27)第五章总结与展望 (28)5.1 总结 (28)5.2 展望 (28)参考文献 (28)第一章概述有史以来,人类一直有一个梦想,那就是可以像蓝天上自由翱翔的鸟儿一样。
基于双DSP架构的微小型无人机飞行控制系统

微型机器人
微型机器人的发展与展望摘要:微型机器人是微电子机械系统的一个重要分支, 由于它能进入人类和宏观机器人所不及的狭小空间内作业, 近几十年来受到了广泛的关注。
本文首先给出了近年来国内外出现的几种微型机器人, 在分析了其特点和性能的基础上, 讨论了目前微型机器人研究中所遇到的几个关键问题, 并且指出了这些领域未来一段时间内的主要研究和发展方向。
关键词:微型机器人; 关键技术;应用**前言机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。
微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。
微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。
MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。
微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。
微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。
然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。
微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。
该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEM S技术继续前进。
1 微型机器人的发展概况近年来,采用MEMS技术的微型卫星、微型飞行器和能进入狭窄空间的微型机器人展示了诱人的应用前景和军民两用的战略意义。
微小型无人机通信中继的动态频率选择算法优化
微小型无人机通信中继的动态频率选择算法优化一、引言随着无人机技术的不断发展,其应用范围也逐渐扩大。
然而,在无人机通信中,信号覆盖范围、抗干扰能力等问题依然存在。
为了解决这些问题,设计一种动态频率选择算法优化无人机通信中继系统,以提高通信可靠性,具有重要意义。
二、无人机通信中继的基本原理以地面监测、行车监测为例,由于无人机信号传输距离有限,不足以覆盖整个监测区域,且受到干扰的影响,信号质量容易受影响。
因此,在信号传输过程中需要中继器来扩大信号覆盖范围,同时通过信号增强以提高信号品质。
无人机通信中继器通常由多个无人机组成,其中一个作为主控制器,其余作为从控制器,通过数据交互实现数据传输。
三、现有无人机通信中继算法的缺陷现有的无人机通信中继算法,通过在不同频段进行切换来选择合适的频率,以确保信号能够稳定地传输。
然而,这种算法存在以下缺陷:1. 频率均衡问题。
在不同频段进行切换时,往往会出现频率过多或过少的问题,导致通信不稳定,甚至断开。
2. 消耗过多的电量。
频率的切换会引起中继器的能耗增加,导致其飞行时间减短,降低了中继器的覆盖能力和可靠性。
3. 通信延迟问题。
频率的切换存在一定的延迟,会导致通信的延时增加,从而限制了通信的实时性。
四、提出动态频率选择算法为了解决现有算法的缺陷,本文提出了一种基于动态频率选择的无人机通信中继算法。
该算法的主要思路是根据信号质量的变化实时调整中继器的工作频率,以最大程度地提高通信质量和频率利用率。
算法流程如下图:(图略)动态频率选择算法流程具体实现:在无人机中继器中设置两个频率参数:最佳频率和备用频率。
最佳频率是当前信号质量最好的频率,通信中继器优先使用最佳频率进行数据传输。
当最佳频率出现通信故障,通信中继器会立即切换到备用频率,保证通信不中断。
同时,在切换频率时,本文采用频率平衡算法,以保证频率能够均衡地使用,使得通信质量更加稳定。
五、实验结果及分析在实验中,本文将设计的动态频率选择算法与传统的频率选择算法进行比较。
微小型多旋翼无人机抗风能力测试平台的研发
查,保证其安装的准确性。同时,提高人员的整体素
质,操作时应严格按照电梯的安装操作规程进行操作,
避免设备的碰撞,及时找出电梯存在问题及故障类型申
报,由电梯生产厂家的专业人员进行设备故障检修排
除,切勿私自对电梯故障进行操作。
(4) 加强设备的维护保养检查工作
电梯运行过程中,定期对限速器-安全钳的误操作
及存在的安全隐患进行检查,发现问题,及时联系相关
(2) 风洞难以提供针对微小型多旋翼无人机实际使用中
基金项目:广东省省级科技计划项目 (编号:2017B010116005)
收稿日期:2020-09-22
·159·
面临的复杂的模拟实际工况和一些特别的风向;(3) 微
小型多旋翼无人机在风洞中进行抗风实验时容易失控,
导致无人机的高报废率和对风洞设备的损害等风险。
有防护网 5。防护网通过顶部的十字交叉杆固定在垂直
垂直风风机和侧向风风机均选择动叶可调轴流风
机。动叶可调轴流风机具有调节效率高,使调节后的风
机处于高效率区内工作的特点。轴流风机调节动叶安装
角,可改变风机的性能曲线。通过性能曲线、动叶安装
角和风道性能曲线的组合可以得出一系列的工作点,满
足不同的测试风场的需求。
作,亦不能出现异常。
端通过滑槽与立柱连接,既可在滑槽中旋转调节方向,
2
又可沿滑槽上下滑动调节高度。
抗风能力测试平台
(1) 平台设计思路
为了实现上述垂直风和斜向上侧风的组合气流场模
拟工况的设计指标,从场地选择、风机布置、出风口不
同方向动作的实现 3 个方面对抗风能力测试平台进行
设计。
为了尽量减少外界气流场对试验的影响,抗风能力
固定支架和连接杆绕球绞转动,灵活的固定装置组件将
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程报告
课程名称:无人作战
论文题目:微小型无人系统技术的
发展现状及其重要意义
学生姓名:潘子龙
学生学号: 14070049
院系队别:七院五队
2015年5月20日
1
微小型无人系统技术的
发展现状及其重要意义
摘要
本文从微小型无人系统的内涵出发,阐述了包括微小型飞行器、微小型机器人、微小型水下无人航行器和微小型航天器等微小型无人系统的国内外发展现状,着重介绍了发展微小型无人系统的战略地位、重要意义及微小型无人系统的重要作用。
关键词:微小型;无人系统
一、微小型无人系统发展背景
国际上产业与军事部分的科学家、战略思想家和未来学家们以为:“五种经常重叠的技术最有可能在今后15~20年使军队发生革命性的变化。
这五种技术为:机器人技术、先进的动力与推进技术、微型化技术、移动和自适应数字网络、飞速发展的生物科学。
”
微小型无人系统就是二十世纪九十年代由美国等国家开始发展的融合了上述
技术的新概念武器,它不但在基础理论、设计、制造与试验技术等方面是革命性创新,而且将对二十一世纪的战争模式带来革命性的影响。
二、微小型无人系统的研究重点
微小型无人系统技术的内涵是:根据无人系统的特殊功能和特性,应用微机电系统(MEMS)、机器人、传感器、控制等先进技术,综合集成为微小型无人系统的光机电一体化技术。
目前研究的重点是:微型飞行器、微小型机器人、微小型水下无人航行器和微小型航天器等。
下面将详细介绍国内外的研究进展。
2
1、微型飞行器技术
微型飞行器(MA V)的概念是由美国于二十世纪九十年代最先提出的,并进行了可行性论证,要求微型飞行器最大尺寸为15cm,重量在百克以下,航程大于10km,最高时速达80km/h,最高飞行高度可达150m。
同时还应有导航及通讯能力,可用手掷、炮射或飞机部署,具有侦察成像、电磁干扰等作战效能,一次性使用的微型飞行器的价格计划在1000美元以下。
目前美国国防高级研究计划局DARPA有十余项微型飞行器研究计划正在进行,包括固定翼、旋翼和扑翼式微型飞行器,图1所示就是其中几种较典型的微型飞行器。
图1 微型飞行器
例如在阿富汗战场上,美军已开始使用一种名为“微星”的微型飞行器进行情报收集,海军陆战队士兵可以通过便携式电脑操纵“微星”,可侦察前方5km的情况。
如图2所示,“仿昆虫机器人”是微型飞行器的一个新概念,在九十年代初被提出。
3。