S7-200 SMART PLC 串口通信说明(图文并茂)
S7-200 SMART PLC串口通信说明(图文并茂)

S 7-200 S M A R T 串口通信简介S 7-200 S M A R T 支持的串口通信硬件及连接资源如表 1所示: 注意:1. P P I 模式只支持 S 7-200 S M A R T C P U 与 H M I 设备之间的通信;2. 通信信号板的工作模式(R S 485/R S 232)是由用户决定的,可以在 M i c r o /W I N S M A R T 中通过设置系统块来设置。
详细设置方法见:如何设置串口通信参数 通信端口定义1.S 7-200 S M A R T C P U 本体集成 R S 485 端口 (端口 0)表 2. S 7-200 S M A R T C P U 本体集成 R S 485 端口引脚定义 2.通信信号板 表 1.S 7-200 S MA R T 串口参数CPU 本体集成通讯口通信信号板(S B C M 01)通讯口类型R S 485R S 485R S 232支持的通信协议P P I / 自由口 / M O D B U S / U S S 波特率P P I (9600,19200,187500 b /s )自由口(1200,115200 b /s )连接资源每个通信口可连接 4 个 H M I 设备C P U 插座(9针母头)引脚号信号P o r t 0(端口0)引脚定义1屏蔽机壳接地224V 返回逻辑地(24V 公共端)3R S -485信号 B R S -485信号 B 4发送请求R T S (T T L )55V 返回逻辑地(5V 公共端)6+5V +5V ,通过100 O h m 电阻7+24V +24V8R S -485信号 A R S -485信号 A9不用10位协议选择(输入)金属壳屏蔽机壳接地表 3.通信信号板(P o r t 1)引脚定义通信信号板(S B C M 01)引脚标记R S 485R S 232机壳接地机壳接地T X /B R S 485-B R S 232-T x R T S R T S (T T L )R T S (T T L )M 逻辑公共端逻辑公共端R X /AR S 485-AR S 232-R x通信信号板通信信号板可以扩展 C P U 的通信端口,其安装位置如图 1所示。
第7章 S7-200 PLC的通信及网络控制(赖指南)PPT课件
(1)增加网络的长度:在网络中使用一个中继器可以使网络 的通讯距离扩展50米。如图7-16所示,如果在已连接的两个中 继器之间没有其它节点,那么网络的长度将能达到波特率允许 的最大值。在一个串联网络中,最多可以使用9个中继器,但是 网络的总长度不能超过9600米。
第7章 S7-200 PLC的通信及网络控制
7.1 计算机通信方式与串行接口
7.1.1 计算机的通信方式
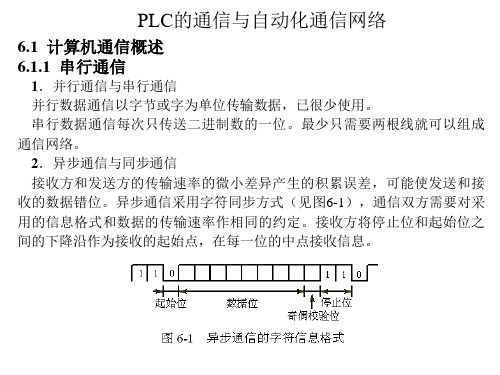
1.并行通信与串行通信 8根或16根数据线、一根公共线外,还需要通信双方联络用的 控制线。并行通信的传输速度快,但是传输线的根数多,抗干扰 能力较差,一般用于近距离数据传输,例如PLC的模块之间的数据 传输,如图7-1所示。 串行通信多用于可编程序控制器与计算机之间,多台可编程序 控制器之间的数据传送。传送时,数据的各个不同位分时使用同
由于同步通信方式不需要在每个数据字符中增加起始位、停 止位和奇偶效验位,只需要在发送的数据块之前一两个同步字符 ,所以传输效率高,但是对硬件的要求较高。
7.1.2 网络结构概述
1.简单网络 多台设备通过传输线相连,可以实现多设备间的通信,就形 成网络结构。图7-4所示就是一种最简单的网络结构,它由单主 设备和多个从设备构成。
10到100兆
8个普通连接 1个STEP 7-MicroMIN连接
更多信息可参考SIMATIC NET CP243-1工业以太网通讯处理 器手册或SIMATIC NETCP243-1 IT工业以太网及信息技术通讯处 理器手册。
(5)AS-Interface协议 利用扩展模块CP243-2,S7-200PLC可以作为传感器-执行器接
针号 1 2 3 4 5
西门子S7-200smart以太网通信(图文并茂)

西门子S7-200smart以太网通信(图文并茂)S7-200smart与电脑的连接1 S7-200smart编程软件使用介绍1.1 软件的安装与卸载软件安装对计算机要求:操作系统:Windows XP SP3(仅32位) 、 Windows 7(支持32位和64位)至少350M字节的空闲硬盘空间安装方法:打开编程软件安装包。
找到安装程序SETUP.exe双击运行直接安装(如图所示)1.2 S7-200SMARTPLC程序的上载和下载步骤一、建立通信连接S7-200 SMART CPU 可以通过以太网电缆与安装有STEP7 Micro/WIN SMART 的编程设备进行通信连接。
注意:一对一通信不需要交换机,如果网络中存在两台以上设备则需要交换机。
1、硬件连接(编程设备直接与 CPU 连接)首先,安装 CPU 到固定位置;其次,在 CPU 上端以太网接口插入以太网电缆,如图所示;最后,将以太网电缆连接到编程设备的以太网口上。
2、建立 Micro/WIN SMART 与 CPU 的连接首先,在STEP 7-Micro/WIN SMART 中,点击“通信” 按钮(如图)打开“通信” 对话框(如图);然后,进行如下操作:a. 单击“网络接口卡” 下拉列表选择编程设备的“网络接口卡”。
b. 双击“更新可用设备” 来刷新网络中存在的 CPU ;c. 在设备列表中跟据 CPU 的 IP 地址选择已连接的 CPU。
d. 选择需要进行下载的 CPU 的 IP 地址之后,单击“OK” 按钮,建立连接。
(同时只能选择一个 CPU 与Micro/WIN SMART 进行通信)注意:如果网络中存在不只一台设备,用户可以在“通信” 对话框中左侧的设备列表中选中某台设备然后点击“Flash Lights” 按钮轮流点亮 CPU 本体上的 RUN ,STOP 和 ERROR 灯来辨识该 CPU。
也可以通过“MAC地址” 来确定网络中的 CPU, MAC 地址在 CPU 本体上“LINK” 指示灯的上方。
(完整word版)西门子smart200通讯说明文档.docx
TPC和西门子SMART200 PLC通讯说明S7-200 SMART CPU 模块本体集成1个以太网接口和一个信号版,其通讯端口数量最多可增到 3 个。
串口支持下列协议:PPI、ModbusRTU、 USS、自由口通讯RS485 接口,通过扩展CM01通讯连接方式:<1>采用标准串口型号的西门子PC/PPI电缆。
<2>采用RS232/485 转换器连接,RS485的A 正B 负与PLC编程口3 正8 负连接。
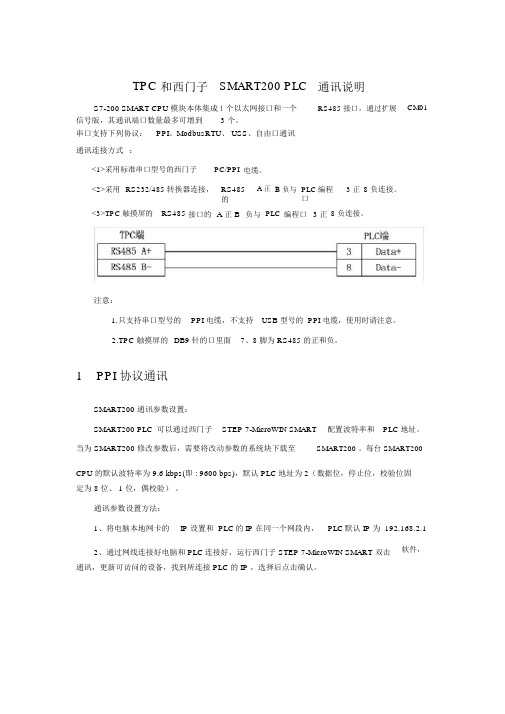
<3>TPC 触摸屏的RS485接口的 A 正 B负与PLC编程口 3 正8 负连接。
注意:1.只支持串口型号的PPI 电缆,不支持USB 型号的 PPI 电缆,使用时请注意。
2.TPC 触摸屏的DB9 针的口里面7、8 脚为 RS485 的正和负。
1PPI 协议通讯SMART200 通讯参数设置:SMART200 PLC 可以通过西门子STEP 7-MicroWIN SMART配置波特率和PLC 地址。
当为 SMART200 修改参数后,需要将改动参数的系统块下载至SMART200 。
每台 SMART200CPU 的默认波特率为 9.6 kbps(即 : 9600 bps),默认 PLC 地址为 2(数据位,停止位,校验位固定为 8 位、 1 位,偶校验)。
通讯参数设置方法:1、将电脑本地网卡的IP 设置和 PLC的 IP 在同一个网段内,PLC默认 IP 为 192.168.2.12、通过网线连接好电脑和 PLC连接好,运行西门子 STEP 7-MicroWIN SMART 双击通讯,更新可访问的设备,找到所连接 PLC 的 IP ,选择后点击确认。
软件,3、双击系统块,打开通讯部分,设置RS485 端口的通讯参数,设置地址和波特率,默认波特率为 9.6 kbps(即 : 9600 bps),默认 PLC地址为 2。
4、 MCGS 添加西门子PPI 驱动,通用串口父设备使用默认参数设置,如下图“西门子 _S7200PPI”子设备参数设置如下:设备地址: PLC 设备地址,可设定范围1-31,默认值为2。
S7-200 SMART PLC 系统功能说明(图文并茂)

Page 1 of 58
存储卡
S 7 2 0 0S M A R TC P U支持商用M i c r o S D 卡(支持容量为4 G ,8 G ,1 6 G ):可用于程序传输,C P U 固件更新,恢复 C P U出厂设置。 打开C P U 本体数字量输出点上方的端子盖,可以看到右侧有一卡槽,将M i c r o S D 卡缺口向里插入,如图 1 所示:
S7-200 SMART 实时时钟
S 7 2 0 0S M A R T 的硬件实时时钟可以提供年、月、日、时、分、秒的日期/ 时间数据。 C P UC R 4 0A C / D C / R e l a y没有内置的实时时钟,C P US R 2 0 、C P US R 4 0 、C P US T 4 0 、C P US R 6 0 、C P US T 6 0 支持内置的实时时钟,C P U 断电 状态下可保持7 天。 S 7 2 0 0S M A R TC P US R 2 0 的时钟精度是± 1 2 0秒 /月,C P US R 4 0 、C P US T 4 0 、C P US R 6 0 、C P US T 6 0 的时钟精度是 1 2 0秒 /月。 S 7 2 0 0S M A R TC P U靠内置超级电容为实时时钟提供电源缓冲,保持时间为典型值7 天,最小值6 天。缓冲电源放电完毕后,再次上电后 时钟将停止在缺省值,并不开始走动。 注意:因为 C P UC R 4 0无内置超级电容,所以实时时钟无电源缓冲,尽管用户可以使用R E A D _ R T C和 S E T _ R T C指令设置日期/ 时间 数据,但是当 C P UC R 4 0断电并再次上电时,这些日期/ 时间数据会丢失,上电后日期时间数据会被初始化为2 0 0 0 年1 月1 日。 为了提高运算效率,应当避免每个程序周期都读取实时时钟。实际上可读取的最小时间单位是1 秒,可每秒读取一次(使用S M 0 . 5 上 升沿触发读取指令)。 使用程序读取的实时时钟数据为B C D 格式,可在状态表中使用十六进制格式查看。 要设置日期、时间值,使之开始走动,可以:
西门子200SMART跟电脑通信的两种方法「详细步骤」
西门子200SMART跟电脑通信的两种方法「详细步骤」昨天的文章介绍了S7-200SMART的安装方法。
今天给大家介绍下PLC怎么跟电脑通信,也是很多新手一直问的问题。
今天介绍两种方式。
第一种是电脑跟PLC直连,第二种是通过路由器或者交换机连接。
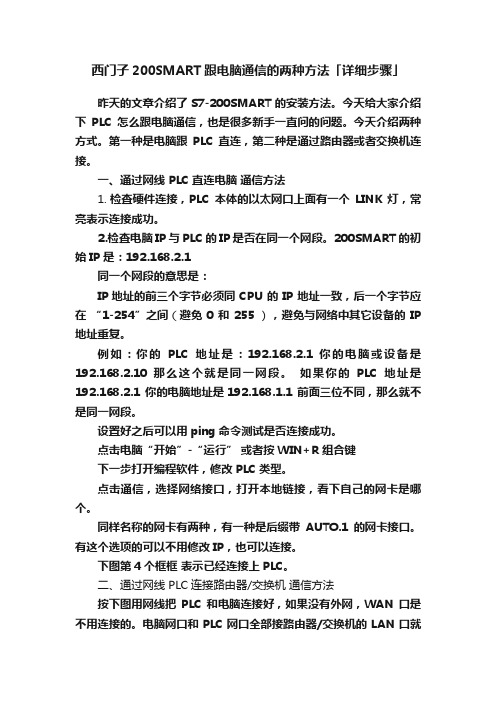
一、通过网线 PLC直连电脑通信方法1.检查硬件连接,PLC本体的以太网口上面有一个LINK灯,常亮表示连接成功。
2.检查电脑IP与PLC的IP是否在同一个网段。
200SMART的初始IP是:192.168.2.1同一个网段的意思是:IP地址的前三个字节必须同 CPU 的 IP 地址一致,后一个字节应在“1-254”之间(避免 0 和 255 ),避免与网络中其它设备的 IP 地址重复。
例如:你的PLC地址是:192.168.2.1 你的电脑或设备是192.168.2.10 那么这个就是同一网段。
如果你的PLC地址是192.168.2.1 你的电脑地址是192.168.1.1 前面三位不同,那么就不是同一网段。
设置好之后可以用ping命令测试是否连接成功。
点击电脑“开始”-“运行” 或者按WIN+R组合键下一步打开编程软件,修改PLC类型。
点击通信,选择网络接口,打开本地链接,看下自己的网卡是哪个。
同样名称的网卡有两种,有一种是后缀带AUTO.1的网卡接口。
有这个选项的可以不用修改IP,也可以连接。
下图第4个框框表示已经连接上PLC。
二、通过网线 PLC连接路由器/交换机通信方法按下图用网线把PLC和电脑连接好,如果没有外网,WAN口是不用连接的。
电脑网口和PLC网口全部接路由器/交换机的LAN口就行。
连接好之后上第一步教的方法连接PLC即可今天分享的200SMART PLC跟电脑通信结束,大家如遇到什么问题可以在文章后面留言。
如果你觉得小编写的够详细,那么请转发到你的朋友圈,谢谢支持!。
S7-200SMART PLC的通信与自动化通信网络
4.网络连接器 终端电阻可吸收网络上的反射波,有效地增强信号强度。网络终端的连接 器上的开关应放在On位置(接入终端电阻),网络中间的连接器上的开关应 放在Off位置。 5.网络中继器 中继器用来将网络分段,每个网段最多32个设备,中继器可扩展网络长度。 6.PPI协议 PPI是一种主站-从站协议,HMI是通信主站,S7-200 SMART在通信网络中 作为从站。
2.S7-1200作客户机的S7通信 S7-1200 有集成的以太网端口,在博途中设置 S7-1200的IP 地址和子网掩码, 生成以太网,添加一个S7连接。连接伙伴为“未指定”,由S7-1200建立连接。 在该连接的属性视图的“属性”选项卡中,设置S7-200 SMART的以太网端口 的IP地址和通信双方的 TSAP。在OB1中调用GET和PUT功能块来读写S7-200 SMART的数据区。 3.S7-1200作服务器的S7通信 S7-200 SMART作客户机的程序见例程“以太网客户机”。 在 S7-1200 的项目中,只需要设置 S7-1200的 IP 地址和子网掩码,不用编写 通信程序。
Hale Waihona Puke 在第2、3页设置操作的类型分别为 PUT和GET、要传送的数据的字节数、 远程CPU的IP地址、本地和远程CPU保存数据的起始地址。 在第4页(存储器分配)设置用来保存组态数据的V存储区的起始地址。 第5页(组件)显示用于实现要求的组态的项目组件默认的名称。 在第6页(生成)单击“生成”按钮,自动生成用于通信的子程序等。 4.调用子程序NET_EXE
6.3 基于以太网的S7协议通信 6.3.1 S7-200 SMART之间的以太网通信
1.S7协议 S7协议是专为西门子控制产品优化设计的通信协议,它是面向连接的协议。 S7-200 SMART只有S7单向连接功能。单向连接中的客户机(Client)是向服 务器(Server)请求服务的设备,客户机调用GET/PUT 指令读、写服务器的 存储区。服务器是通信中的被动方,用户不用编写服务器的S7通信程序,S7 通信由服务器的操作系统完成。 2. GET指令与PUT指令 GET指令从远程设备读取最多222B的数据。PUT指令将最多212B的数据写 入远程设备。连接建立后,该连接将保持到CPU进入STOP模式。 3.用GET/PUT向导生成客户机的通信程序 用GET/PUT向导建立的连接为主动连接,CPU是S7通信的客户机。通信伙 伴作为S7通信的客户机时,不需要用GET/PUT指令向导组态,建立的连接是 被动连接。 在第1页(操作)生成名为“写操作”和“读操作”的两个操作。最多允许 组态24项独立的网络操作。通信伙伴可以具有不同的IP地址。
图文详解200SMART与西门子触摸屏的RS485通信
图⽂详解200SMART与西门⼦触摸屏的RS485通信SMART⾯板概述SMART⾯板分为第⼀代产品SMART LINE和第⼆代产品SMART LINE IE,第⼀代产品⽆以太⽹⼝,包括Smart 700和Smart 1000;第⼆代产品集成了以太⽹⼝,包括Smart 700 IE和Smart 1000 IE,⽬前在售的为第⼆代SMART LINE IE系列,第⼀代产品已经停产。
SmartLine IE与第⼀代SmartLine相⽐较主要有以下优点:64K真彩显⽰,⽐较第⼀代的256⾊提升了多倍。
增加了⼯业以太⽹接⼝(⽀持⾃交叉功能)。
通过该以太⽹⼝可以连接S7-200 SMART和LOGO! 0BA7设备,并且可同时连接多台控制器(最多3台)。
扩展了串⼝通信的功能。
连接数⽬S7-200 SMART CPU既可以通过本体集成的RS485端⼝或信号板连接⽀持PPI协议的西门⼦HMI设备,还可以通过本体集成的以太⽹⼝来连接⽀持S7协议的西门⼦HMI设备。
当CPU的三个物理接⼝同时连接西门⼦HMI设备时(包含信号板),最多的连接资源数是16个。
表1. CPU的连接能⼒Smart Panels ⽀持的 PLC:第⼀代产品 SmartLine(⽆以太⽹接⼝):S7-200、OMRON CP1系列、三菱 FX 系列、Modbus RTU注意:只能建⼀个通讯连接,否则Smart Panels ⽆法启动项⽬(⽩屏)。
第⼆代产品SmartLine-IE:串⼝:S7-200、OMRON CP1系列、三菱 FX 系列、Modbus RTU、台达(DVP-SV/ES2 系列)以太⽹:S7-200(CP243-1)、Smart200、LOGO!Smart Panels 通过串⼝只能连接⼀个设备,通过以太⽹可以连接三个设备,但是串⼝和以太⽹不能同时使⽤(编译通不过)。
注意:串⼝和以太⽹⼝只能使⽤⼀个,否则编译通不过。
创建项⽬⽤户需要使⽤WinCC Flexible 2008 SP2 China或以上版本来组态第⼀代产品SmartLine,如果是第⼆代产品SmartLine IE的话,只能使⽤WinCC Flexible 2008 SP4 China进⾏组态。
详细介绍S7-200SMART的自由口通信
详细介绍S7-200SMART的自由口通信
学习S7-200 SMART时了解到,基于RS485接口可实现一下几种通信:
1)modbus RTU通信
2)PPI协议通信
3)USS协议通信
4)自由口通信
何为自由口通信呢?
前三种通信必须要PLC和与其通信的设备支持相同的通信协议,如果两者之间没有共同的通信协议则需要用到自由口通信。
自由口通信也称无协议通信,需要根据对方设备的通信数据格式编写一个临时协议,不仅需要编程人员学会如何编写程序,还需要了解对方的通信数据格式,所以对编程人员要求较高,随着标准协议(modbus,USS等)普及,自由口应用越来越少,但是对于一下小的设备如扫码枪等,并没有集成标准通信协议,所以只能选用自由口通信,Moubus和USS其实是自由口的一个特例。
很多人碰到自由口通信就手足无措了,其实只要掌握规律,自由口通信不一定很难。
为此我总结了自由口通信的基本步骤:
1)读懂对方的数据格式。
串行通信中,数据是一位一位的进行发送,也就是0和1。
为了能够准确的将数据发送过去,往往会加上1个起始位,1个校验位,1个停止位(无校验是为2个停止位)如图1-1所示。
图1-1
我们就以Modbus RTU为例详细看一下串口通信中数据是如何发送和就收的。
ModbusRTU代码系统如下:
·1个起始位。
·7或8个数据位,最小的有效位先发送。
西门子S7-200 SMART 通信端口以及连接方式

西门子S7-200 SMART 通信端口以及连接方式西门子S7-200 SMART 通信端口以及连接方式每个 S7-200 SMART CPU 都提供一个以太网端口和一个 RS485 端口(端口0),标准型 CPU 额外支持 SB CM01 信号板(端口1),信号板可通过 STEP 7-Micro/WIN SMART 软件组态为 RS232 通信端口或 RS485 通信端口。
CPU 通信端口引脚分配1.S7-200 SMART CPU 集成的 RS485 通信端口(端口0)是与 RS485 兼容的9针 D 型连接器。
CPU 集成的 RS485 通信端口的引脚分配如表1. S7-200 SMART CPU 集成 RS485 端口的引脚分配表所示。
2.标准型 CPU 额外支持 SB CM01 信号板,该信号板可以通过 STEP 7-Micro/WIN SMART 软件组态为 RS485通信端口或者 RS232 通信端口。
表 2. 给出了 SB CM01 信号板的引脚分配。
使用STEP 7-Micro/WIN SMART 软件组态 SB CM01 信号板为 RS485通信端口或者RS232通信端口的过程如图 1. SB CM01 信号板组态过程所示。
图1. SB CM01 信号板组态过程EM DP01通讯端口引脚分配EM DP01 上的 RS485 串行通信接口是一个 RS485 兼容的九针迷你 D型插口,与欧洲标准 EN 50170 规定的 PROFIBUS标准一致,下图介绍了通讯端口的引脚分配。
图 2. S7-200SMART EM DP01通讯端口的引脚分配以太网端口连接S7-200 SMART CPU 的以太网端口有两种网络连接方法:直接连接和网络连接。
直接连接:当一个 S7-200 SMART CPU 与一个编程设备、 HMI 或者另外一个 S7-200 SMART CPU 通信时,实现的是直接连接。
S7 200 SMART S7通信
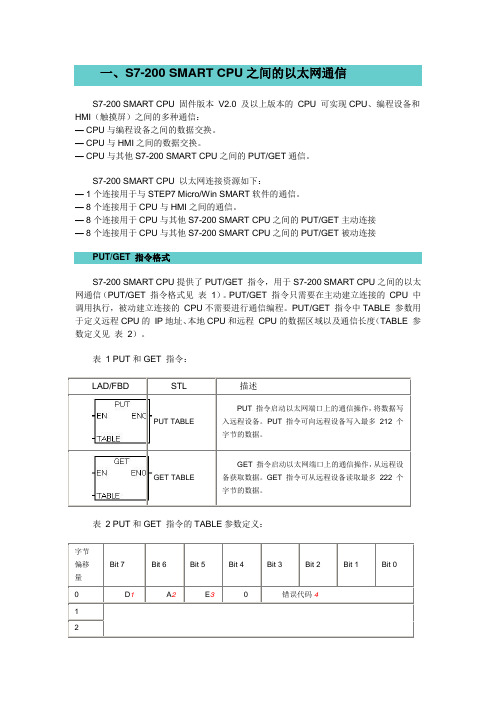
一、S7-200 SMART CPU之间的以太网通信S7-200 SMART CPU 固件版本V2.0 及以上版本的CPU 可实现CPU、编程设备和HMI(触摸屏)之间的多种通信:— CPU与编程设备之间的数据交换。
— CPU与HMI之间的数据交换。
— CPU与其他S7-200 SMART CPU之间的PUT/GET通信。
S7-200 SMART CPU 以太网连接资源如下:— 1个连接用于与STEP7 Micro/Win SMART软件的通信。
— 8个连接用于CPU与HMI之间的通信。
— 8个连接用于CPU与其他S7-200 SMART CPU之间的PUT/GET主动连接— 8个连接用于CPU与其他S7-200 SMART CPU之间的PUT/GET被动连接PUT/GET 指令格式S7-200 SMART CPU提供了PUT/GET 指令,用于S7-200 SMART CPU之间的以太网通信(PUT/GET 指令格式见表1)。
PUT/GET 指令只需要在主动建立连接的CPU 中调用执行,被动建立连接的CPU不需要进行通信编程。
PUT/GET 指令中TABLE 参数用于定义远程CPU的IP地址、本地CPU和远程CPU的数据区域以及通信长度(TABLE 参数定义见表2)。
表1 PUT和GET 指令:LAD/FBD STL 描述PUT TABLEPUT 指令启动以太网端口上的通信操作,将数据写入远程设备。
PUT 指令可向远程设备写入最多212 个字节的数据。
GET TABLEGET 指令启动以太网端口上的通信操作,从远程设备获取数据。
GET 指令可从远程设备读取最多222 个字节的数据。
表2 PUT和GET 指令的TABLE参数定义:字节偏移量Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 0 D1A2E30 错误代码4121 D :通信完成标志位,通信已经成功完成或者通信发生错误。
S7-200SMART介绍 ppt课件

CPU
信号模块
通信板
CPU SR20 CPU SR40 CPU ST40 CPU SR60 CPU ST60 CPU CR40 CPU ST20 CPU CR20 CPU CR60
数字量
DI08;DT08;DR08
DT16;DR16 DT32;DR32
RS-232 / RS-485
Micro HMIs
Basic HMIs
COMFORT HMIs
TD 400C TEXT DISPLAY, 4 LINES SMART HMIs
SMART 700 IE SMART 1000 IE
RS485
IE
S7-200 SMART 硬件:信号板SB 1AQ设置
出现报警时SB面 板上会出现红色指
示灯闪烁
Page 11
2012.7
选择电压输出或者电流输出
电压:±10 V 电流:0- 20 mA
CPU停机的时候模拟 量输出可以选择替代 值或者冻结最后状态
支持上溢和下溢功能; 电压输出支持短路功 能;电流输出支持开
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
S7-200 SMART 软件:保护功能
最长32个字符,由数字、 字母和英文字符组成
Page 21
2012.7
4个等级的密码保护与S7200PLC相似
使能限制V区写功能,该区 域数据能够被读写,其他V
S7-200 SMART 硬件:模块连接
CPU-基本单元
+
信号板或通信板
Page 4
2012.7
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
图文详解S7-200SMART的TCP通信
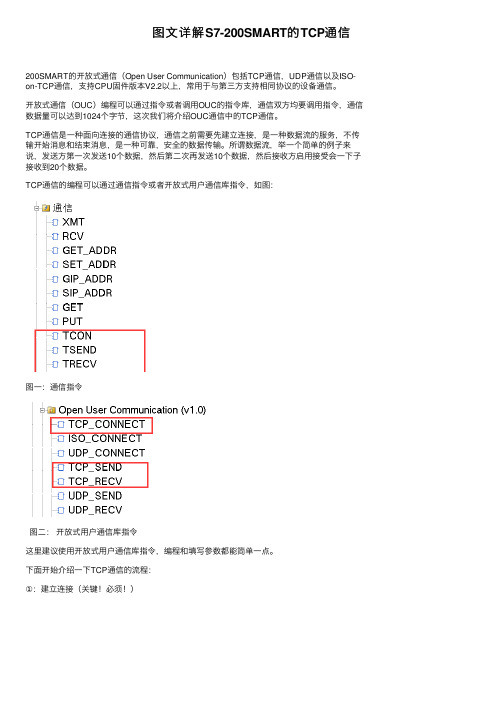
图⽂详解S7-200SMART的TCP通信200SMART的开放式通信(Open User Communication)包括TCP通信,UDP通信以及ISO-on-TCP通信,⽀持CPU固件版本V2.2以上,常⽤于与第三⽅⽀持相同协议的设备通信。
开放式通信(OUC)编程可以通过指令或者调⽤OUC的指令库,通信双⽅均要调⽤指令,通信数据量可以达到1024个字节,这次我们将介绍OUC通信中的TCP通信。
TCP通信是⼀种⾯向连接的通信协议,通信之前需要先建⽴连接,是⼀种数据流的服务,不传输开始消息和结束消息,是⼀种可靠,安全的数据传输。
所谓数据流,举⼀个简单的例⼦来说,发送⽅第⼀次发送10个数据,然后第⼆次再发送10个数据,然后接收⽅启⽤接受会⼀下⼦接收到20个数据。
TCP通信的编程可以通过通信指令或者开放式⽤户通信库指令,如图:图⼀:通信指令图⼆:开放式⽤户通信库指令这⾥建议使⽤开放式⽤户通信库指令,编程和填写参数都能简单⼀点。
下⾯开始介绍⼀下TCP通信的流程:①:建⽴连接(关键!必须!)②:交换数据(发送/接收)③:断开连接(⼀般不⽤)④:分配库存储器(必须!建议选择较⼤的地址避免冲突)接下来介绍⼀下各个指令的每个引脚的含义,⾸先介绍TCP_CONNECT指令参数数据类型描述ENBOOL 使能输⼊Req BOOL 如果Req=TRUE ,CPU 启动连接操作。
如果 Req = FALSE ,则输出显⽰连接的当前状态。
Active BOOL 设置本地CPU 在通信中的⾓⾊Active= TRUE 为主动连接(⼀般⽤于客户端)Active= FALSE 为被动连接(⼀般⽤于服务器)ConnID WORDCPU 使⽤连接 ID (ConnID) 为其它指令标识该连接。
可能的ConnID 范围为0到65534。
IPaddIPaddr4BYTE 这些是IP 地址的四个⼋位字节。
IPaddr1到IPaddr4 填写通信伙伴的IP 地址RemPort WORD RemPort 是远程设备上的端⼝号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S 7-200 S M A R T 串口通信简介S 7-200 S M A R T 支持的串口通信硬件及连接资源如表 1所示: 注意:1. P P I 模式只支持 S 7-200 S M A R T C P U 与 H M I 设备之间的通信;2. 通信信号板的工作模式(R S 485/R S 232)是由用户决定的,可以在 M i c r o /W I N S M A R T 中通过设置系统块来设置。
详细设置方法见:如何设置串口通信参数 通信端口定义1.S 7-200 S M A R T C P U 本体集成 R S 485 端口 (端口 0)表 2. S 7-200 S M A R T C P U 本体集成 R S 485 端口引脚定义 2.通信信号板 表 1.S 7-200 S M AR T 串口参数CPU 本体集成通讯口通信信号板(S B C M 01)通讯口类型R S 485R S 485R S 232支持的通信协议P P I / 自由口 / M O D B U S / U S S 波特率P P I (9600,19200,187500 b /s )自由口(1200,115200 b /s )连接资源每个通信口可连接 4 个 H M I 设备C P U 插座(9针母头)引脚号信号P o r t 0(端口0)引脚定义1屏蔽机壳接地224V 返回逻辑地(24V 公共端)3R S -485信号 B R S -485信号 B4发送请求R T S (T T L )55V 返回逻辑地(5V 公共端)6+5V +5V ,通过100 O h m 电阻7+24V +24V8R S -485信号 A R S -485信号 A9不用10位协议选择(输入)金属壳屏蔽机壳接地表 3.通信信号板(P o r t 1)引脚定义通信信号板(S B C M 01)引脚标记R S 485R S 232机壳接地机壳接地T X /B R S 485-B R S 232-T x R T S R T S (T T L )R T S (T T L )M 逻辑公共端逻辑公共端R X /AR S 485-AR S 232-R x通信信号板通信信号板可以扩展 C P U 的通信端口,其安装位置如图 1所示。
安装完成后,通信信号板被视为端口1(P o r t 1),C P U 本体集成 R S 485 端口被视为端口0(P o r t 0)。
图 1. S 7-200 S M A R T 通信信号板及其安装示意图 串口通讯硬件从三个方面介绍 S 7-200 S M A R T C P U 串口通信硬件:1.使用 S 7-200 S M A R T C P U 本体集成 R S 485 端口接入 R S 485 网络:S 7-200 S M A R T C P U R S 485网络使用双绞线电缆。
每个网段中最多只能连接32个设备。
总线型网络结构如图 2所示:5V +5V ,100Ω 串联电阻图 2.总线型网络连接在上图中,网络连接器A、B、C分别插到三个通信站点的通信口上;电缆a把插头A和B连接起来,电缆b连接插头B和C。
线型结构可以照此扩展。
注意圆圈内的“终端电阻”开关设置。
网络终端的插头,其终端电阻开关必须放在“O N”的位置;中间站点的插头其终端电阻开关应放在“O F F”位置。
2.使用S7-200S M A R T C P U本体集成 R S485口与带 R S232接口 的设备通信:使用R S-232/P P I多主站电缆和自由口通讯功能,可以将S7-200S M A R T C P U连接到多种兼容R S-232标准的设备上。
但电缆必须必须设为自由口模式(开关5=0)才能进行自由口通讯。
开关6用于选择本地模式(D C E)(开关6=0)或远端模式(开关6=1)。
R S232/P P I电缆如图 3所示:图 3.正版R S-232/P P I电缆及其包装盒注意:M i c r o/W I N S M A R T不能通过 R S232/P P I电缆对 S7-200S M A R T C P U进行编程。
3.使用通信信号板使用通信信号板时需要用户自行接线,通信信号板可以工作在 R S232模式和 R S485模式,其接线方式分别参照图 4和图 5:图 4.通信信号板 R S232模式接线示意图设置串口通信参数用户在使用 P P I协议进行 S7-200S M A R T C P U与 S I M A T I C H M I(例如:S M A R T700I E,S M A R T 1000I E,和 T D400C)通信之前,必须设置 R S485端口网络地址和波特率,步骤如下:步骤一:在 M i c r o/W I N S M A R T中点击“系统块”按钮,如图 6所示。
打开系统块对话框;图 6.“系统块” 按钮步骤二:设置C P U本体集成 R S485端口网络地址和波特率,如图 7所示:图 7.设置 C P U本体集成 R S485端口通信参数具体步骤如下:a.选择C P U类型,与需要下载的C P U类型一致;b.设置C P U本体集成R S485端口网络地址;c.设置波特率。
注意:C P U默认网络地址为 2,波特率为 9.6k b p s若用户使用了通信信号板,则还需要对其进行设置,如图 8所示:图 8.设置通信信号板通信参数具体步骤如下:a.选择通信信号板;b.设置通信端口类型;c.设置通信信号板网络地址;d.设置波特率;e.单击 “确定” 按钮,完成设置。
步骤三:将系统块下载至 C P U中。
自由口通信S7-200S M A R T C P U本体集成的R S485通信口和扩展信号板(R S485/R S232)可以设置为自由口模式。
选择自由口模式后,用户程序就可以完全控制通信端口的操作,通信协议也完全受用户程序控制。
S7-200S M A R T C P U本体集成的通信口在电气上是标准的R S-485半双工串行通信口。
此串行字符通信的格式可以包括:l一个起始位l7或8位字符(数据字节)l一个奇/偶校验位,或者没有校验位l一个停止位自由口通信速波特率可以设置为1200、2400、4800、9600、19200、38400、57600或115200。
凡是符合这些格式的串行通信设备,理论上都可以和S7-200S M A R T C P U通信。
自由口模式可以灵活应用。
M i c r o/W I N S M A R T的两个指令库(U S S和M o d b u s R T U)就是使用自由口模式编程实现的。
在进行自由口通信程序调试时,可以使用 R S232/P P I电缆(设置到自由口通信模式)连接P C和C P U,在P C上运行串口调试软件(或者W i n d o w s的H y p e r T e r m i n a l-超级终端)调试自由口程序。
自由口通信要点应用自由口通信首先要把通信口定义为自由口模式,同时设置相应的通信波特率和上述通信格式。
用户程序通过特殊存储器S M B30(对端口0即 C P U本体集成 R S485口)、S M B130(对端口1即通信信号板)控制通信口的工作模式。
C P U通信口工作在自由口模式时,通信口就不支持其他通信协议(比如P P I)。
通信口的工作模式,是可以在运行过程中由用户程序重复定义的。
自由口通信的核心指令是发送(X M T)和接收(R C V)指令。
自由口通信常用的中断有“接收指令结束中断”、“发送指令结束中断”,以及字符接收中断。
用户程序不能直接控制通信芯片而必须通过操作系统。
用户程序使用通信数据缓冲区和特殊存储器与操作系统交换相关的信息。
X M T和R C V指令的数据缓冲区类似,起始字节为需要发送的或接收的字符个数,随后是数据字节本身。
如果接收的消息中包括了起始或结束字符,则它们也算数据字节。
调用X M T和R C V指令时只需要指定通信口和数据缓冲区的起始字节地址。
X M T和R C V指令与网络上通信对象的“地址”无关,而仅对本地的通信端口操作。
如果网络上有多个设备,消息中必然包含地址信息;这些包含地址信息的消息才是X M T和R C V指令的处理对象。
由于S7-200S M A R T的通信端口是半双工R S-485芯片,X M T指令和R C V指令不能同时有效。
XMT和R C V指令X M T(发送)指令的使用比较简单。
R C V(接收)指令所需要的控制稍多一些。
R C V指令的基本工作过程为:1.在逻辑条件满足时,启动(一次)R C V指令,进入接收等待状态2.监视通信端口,等待设置的消息起始条件满足,然后进入消息接收状态3.如果满足了设置的消息结束条件,则结束消息,然后退出接收状态所以,R C V指令启动后并不一定就接收消息,如果没有让它开始消息接收的条件,就一直处于等待接收的状态;如果消息始终没有开始或者结束,通信口就一直处于接收状态。
这时如果尝试执行X M T指令,就不会发送任何消息。
所以确保不同时执行X M T和R C V非常重要,可以使用发送完成中断和接收完成中断功能,在中断程序中启动另一个指令。
在《S7-200S M A R T系统手册》中关于X M T和R C V指令的使用有一个例子。
这个例子非常经典,强烈建议学习自由口通信时先做通这个例子。
字符接收中断S7-200S M A R T C P U提供了通信口字符接收中断功能,通信口接收到字符时会产生一个中断,接收到的字符暂存在特殊存储器S M B2中。
通信口P o r t0和P o r t1共用S M B2,但两个口的字符接收中断号不同。
每接收到一个字符,就会产生一次中断。
对于连续发送消息,需要在中断服务程序中将单个的字符排列到用户规定的消息保存区域中。
实现这个功能可能使用间接寻址比较好。
对于高通信速率来说,字符中断接受方式需要中断程序的执行速度足够快。
一般情况下,使用结束字符作为R C V指令的结束条件比较可靠。
如果通信对象的消息帧中以一个不定的字符(字节)结束(如校验码等),就应当规定消息或字符超时作为结束R C V指令的条件。
但是往往通信对象未必具有严格的协议规定、工作也未必可靠,这就可能造成R C V指令不能正常结束。
这种情况下可以使用字符接收中断功能。
常问问题如何人为结束R C V接收状态?接收指令控制字节(S M B87/S M B187)的e n位可以用来允许/禁止接收状态。
可以设置e n为“0”,然后对此端口执行R C V指令,即可结束R C V指令。
需要定时向通信对象发送消息并等待回复的消息,如果因故消息没有正常接收,下次无法发送消息怎么办?可以在开始发送消息时加上人为中止R C V指令的程序。