车载网络2-车用总线技术概述
合集下载
第2章 汽车总线概述
减少了装配步骤(比如:装配奥迪A6轿车时,方向盘模块减少
上一页 下一页 返回
2.1为什么要采用总线技术
5个,安装步骤减少2个)
5.增大开发余地 各控制器可以把整车功能相对随意地分担,新的功能和新技 术可以通过软件进行更新。
2. 1. 3总线技术的发展
1983年,丰田汽车公司在世纪牌汽车上最早采用了应用光 缆的车门控制系统,实现了多个节点的连接通信。 1986-1989年间,在车身系统上装配了铜线的网络。 GM公司的车灯控制系统已经处于批量生产的阶段。 1983年Robert Bosch公司开始开发汽车总线系统,德国 的Wolfhard Lawrenz教授给这种新总线命名为
上一页 下一页 返回
2.2总线系统信息传输及总体构成
位组成。因此,每秒钟所传输的字符数即字符速率,字符速 率和波特率是两种概Байду номын сангаас。 波特率和比特率的区别: ①波特率指信号每秒的变化次数;比特率指每秒可传输的二进 制位数。 ②在无调制的情况下,波特率精确等于比特率。采用调相技 术时,波特率不等于比特率。
上一页 下一页 返回
2.2总线系统信息传输及总体构成
(2)改变信息优先级 如车辆发生相撞事故,安全气囊控制单元会发出负加速度传 感器的信号,这个信号的优先级在动力系统总线中是非常高 的,但转到舒适系统车载网络后,网关调低了它的优先级, 因为它在舒适系统中其功能只是打开车门和灯。 (3)网关可作为诊断接口 根据车辆的不同,网关可能安装在组合仪表内、车上供电控 制单元内或在自己的网关控制单元内。由于通过CAN数据总 线的所有信息都供网关使用,所以网关也用作诊断接口。 网关相当于站台(Gateway ),见图2-7。 网关的主要任务是使两个速度不同系统之间能进行信息交换。
车载网络技术ppt课件
16
完整版PPT课件
4 各种车用总线的介绍----- LIN
局域网互联(LIN)是用于汽车分布式电控系统的一种 新型低成本串行通信系统,它是一种基于UART的数据格 式、主从结构的单线12V的总线通信系统,主要用于智能 、传感器和执行器的串行通信,而这正是CAN总线的带宽 和功能所不要求的部分。由于目前尚未建立低端多路通信 的汽车标准,因此LIN正试图发展成为低成本的串行通信 的行业标准。LIN的标准简化了现有的基于多路解决方案 的低端SCI,同时将降低汽车电子装置的开发、生产和服 务费用。LIN采用低成本的单线连接,传输速度最高可达 20kb/s,对于低端的大多数应用对象来说,这个速度是 可以接受的,它的媒体访问采用单主、多从的机制,不需 要进行仲裁。从节点中不需要晶体震荡器而能进行自同步 ,这极大地减少了硬件平台的成本。
转向、线控刹车等),即利用容错的电气/电子系 统取代机械/液压部分。线控操作包括从转向到刹 车和加速等所有汽车控制应用互连技术,它可以 补充并将最终代替目前的机械和液压解决方案。 就总体器件和组装来说,采用电子系统比采用机 械和液压部件成本更低。另外,FlexRay的高数 据速率使它非常适合于汽车骨干网络。
3
完整版PPT课件
Contents
1. 车载网络技术的发展简史
2. 车载网络技术介绍 3. 车载网络系统在汽车上的应用 4. 各种车用总线的介绍 5. 结语
4
完整版PPT课件
2 车载网络技术介绍
❖ 现场总线 是用作现场控制系统的,直接与所有受控
25
完整版PPT课件
LOGO
整个网络有一个总体时钟,每一个控制单
元有一个局部时钟,FlexRay系统有一个特定
汽车总线及车载网络技术

4
能够理解MOST总线的原理,熟悉MOST总 线在汽车中的应用
5
能够理解车载以太网的主要技术,熟悉车载 以太网的应用
01 •汽车总线
汽车总线技术的产生与分类
• 1.汽车总线技术的产生
• 请说说为什么要使用总线技术?
汽车总线技术的产生与分类
• 2.汽车总线的分类
• 美国汽车工程师学会(SAE)的汽车网络委员会按照系统的复杂程度、传输流量、传输速度、传输可靠性、 动作响应时间等参量,将汽车数据传输网络划分为A、B、C、D、E五类。
LIN总线
• 2. LIN总线系统的结构
• (1)LIN的网络结构 • LIN总线上的最大电控单元节点数为16个,系统中
两个电控单元节点之间的最大距离为40m。 • LIN总线网络由一个主节点一个或多个从节点组成。
所有节点都包含一个从任务(Slave Task),负责 消息的发送和接收;主节点还包含一个主任务 (Master Task),负责启动LIN总线网络中的通 信。
CAN总线
• CAN网络拓扑可以根据几何图形的形状分为五种类型:总线拓扑、环形拓扑、星型拓扑、网络拓扑和树型 拓扑,这些形状也可以混合形成混合拓扑。因为电动汽车的网络特性可以概括为通信距离短、网络复杂度要 求低、可扩展性要求高、实施可靠性要求高。
星形拓扑
网络拓扑
环形拓扑
树形拓扑
图 6-2 CAN 网络拓扑形式
LIN总线
• (2)LIN的节点结构 • 一个LIN节点主要由微控制器和LIN收发器组成,而微控制器通过UART/SCI接口与LIN收发器连接,几乎所
有微控制器都具备UART/SCI接口,并且LIN收发器(如TJA1020、MC33399等)的RXD、TXD引脚可与微 控制器的RXD、TXD引脚直接连接,无需电平转换。在LIN系统中,加入新节点时,不需要其他从节点作任 何软件或硬件的改动。LIN和CAN一样,传送的信息带有一个标识符,它给出的是这个信息的意义或特征, 而不是这个信息传送的地址。
《汽车车载网络技术详解 第2版》课件 第3章 常用车载网络系统的结构与原理
lan用于汽车与can相似主要是为了方便车载各电控单元间进行的各种数据交换以达到对汽车性能的精确高速控制减少配线的目的1lan的传输介质最常见的lan的类型是采用同轴电缆的总线型树形网络当然也可以选择采用双绞线同轴电缆甚至光纤的环形网
汽车检修技能提高教程从书
汽车车载网络 技术详解
目录
前言 第1章 车载网络系统基础知识 第2章 CAN总线传输系统 第3章 常用车载网络系统的结构与原理 第4章 光学总线系统 第5章 以太网与FlexRay总线 第6章 丰田汽车多路传输系统 第7章 奥迪大众车系车载网络系统 第8章 通用车系车载网络系统 第9章 本田多路集成控制系统 第10章 汽车车载网络系统检修
VAN互补数据对干扰的消除
2.电压水平
VAN互补数据对的信号形式
示波器显示的VAN信号
互补数据对形式的VAN信号
VAN信号接收-传输电路
VAN信号的接收过程
VAN信号的传输过程
3.诊断
VAN的物理层具备容错能力,因为它有3个共 用模式的比较器。这3个比较器用来将DATA 和DATAB与参照电压进行比较,以确定是否 存在故障
VAN入口的3个比较器
4.休眠/唤醒 VAN的物理层管理VAN数据总线的休眠/唤醒机制,为了实现这 种机制,VAN数据总线的线路接口提供3个主要接头以便完成以 下功能:
①主导由顾客操作引起的网络唤醒(例如:车辆解锁);
②检测由另一个电脑造成的网络唤醒和允许正常功能运行;
③车辆从休眠状态解除情况下再次转入休眠状态。
9.VAN数据总线系统签收回复
VAN数据总线系统的签收回复是由数据发送 者激活和实现的。如果最后一个请求与一个 确切的电控单元相连接(“点对点”模式), 它将激活签收回复命令。
汽车检修技能提高教程从书
汽车车载网络 技术详解
目录
前言 第1章 车载网络系统基础知识 第2章 CAN总线传输系统 第3章 常用车载网络系统的结构与原理 第4章 光学总线系统 第5章 以太网与FlexRay总线 第6章 丰田汽车多路传输系统 第7章 奥迪大众车系车载网络系统 第8章 通用车系车载网络系统 第9章 本田多路集成控制系统 第10章 汽车车载网络系统检修
VAN互补数据对干扰的消除
2.电压水平
VAN互补数据对的信号形式
示波器显示的VAN信号
互补数据对形式的VAN信号
VAN信号接收-传输电路
VAN信号的接收过程
VAN信号的传输过程
3.诊断
VAN的物理层具备容错能力,因为它有3个共 用模式的比较器。这3个比较器用来将DATA 和DATAB与参照电压进行比较,以确定是否 存在故障
VAN入口的3个比较器
4.休眠/唤醒 VAN的物理层管理VAN数据总线的休眠/唤醒机制,为了实现这 种机制,VAN数据总线的线路接口提供3个主要接头以便完成以 下功能:
①主导由顾客操作引起的网络唤醒(例如:车辆解锁);
②检测由另一个电脑造成的网络唤醒和允许正常功能运行;
③车辆从休眠状态解除情况下再次转入休眠状态。
9.VAN数据总线系统签收回复
VAN数据总线系统的签收回复是由数据发送 者激活和实现的。如果最后一个请求与一个 确切的电控单元相连接(“点对点”模式), 它将激活签收回复命令。
汽车总线技术介绍

LIN网络在车镜控制上的应用
随着汽车技术和网络通信技术的发展, 汽车信息通信的网络化是必然趋势。汽车信 息通信的多样化促进了汽车分级制网络的产 生和发展。LIN作为一种性能优异、价格低 廉的新型A类总线,必将进一步促进汽车分 级制网络结构的实施和完善,推动汽车技术 的发展。同时,LIN作为一个开放的协议, 在工业及家电领域也有着广阔的应用前景。
通讯概念
LIN包含一个宿主节点和一个或多个从属节点。所 有节点都包含一个被分解为发送和接收任务的从属通 讯任务,而宿主节点还包含一个附加的宿主发送任务。 在实时LIN中,通讯总是由宿主任务发起的。
宿主节点发送一个包含同步中断、同步字节和消息 识别码的消息报头。从属任务在收到和过滤识别码后 被激活并开始消息响应的传输。响应包含两个、四个 或八个数据字节和一个检查。报头和响应部分组成一 个消息帧。
这样的通讯机制带来了非常理想的效果:
·系统灵活性:在LIN网络中可以直接增加节 点而不需要对其它从机节点的硬件和软件进行 修改;
·报文路由: 报文的内容由标识符定义;
·广播: 多个节点可以同时接收一个单独的 报文帧,并对报文作出反应。
LIN在汽车中的应用
车门控制LIN网络的结构 及其在车门上的布置如右 图所示,该网络由主机节 点、后视镜从机节点、摇 窗机从机节点、门锁从机 节点构成。
CAN 总 线
CAN(Controller Area Network)即控制器局域网,可以归 属于工业现场总线的范畴,通常称为CAN bus,即CAN总 线,是目前国际上应用最广泛的开放式现场总线之一。
CAN 最初出现在汽车工业中,80年代由德国Bosch公司 最先提出。最初动机是为了解决现代汽车中庞大的电子控 制装置之间的通讯,减少不断增加的信号线。
第1章 汽车总线系统基础知识

• 5.比特率
• 比特率是指每秒传输的比特(bit)数。单位为bit/s,也可表示为bps (bit per second),比特率越高,单位时间传送的数据量越大。计 算机中的信息都用二进制的0和1来表示,其中每个0或1被称为一个 位,即bit(位)。大写B表示Byte即字节,1个字节= 8个位,即 1B=8bit。表示文件大小的单位,一般都使用千字节(KB)来表示文 件的大小。
• 接着,美国汽车工程师协会提出了J1850。
上一页 下一页 返回
1.1 汽车总线系统概述
• 此后,日本也提出了各种各样的总线系统方案,并且丰田、日产、三 菱、本田及马自达公司都已经处于批量生产阶段,但没有统一为以车 身系统为主的控制方式。
• 而在其他国家,特别是欧洲的厂家则采用CAN,同时发表文章介绍 采用大型CAN网络的车型。由于他们在控制系统上都可以采用CAN ,从而充分地证明了CAN在此领域内的先进性。
• 1. 链路(传输媒体)
• 链路指网络信息输出的媒体,分为有线和无线两种类型,目前汽车上 使用的大多数都是有线网络,通常用于局域网的传输媒体有双绞线、 同轴电缆和光纤。
• 1986 年2 月,Robert Bosch 公司在美国汽车工程师协会(SAE) 汽车工程协会大会上介绍了一种新型的串行总线——CAN 控制器局 域网,那是汽车总线系统CAN 诞生的时刻。CAN 全称为Controller Area Network,即控制器局域网,是国际上应用最广泛的现场总线 之一。
• 如图1-4(a)所示,在传统控制电路中,各种控制信号都属于平行关 系,相互之间并没有关联,每个信号都有专属的信号线。因此,如果 需要传输多个信号,就需要多根线进行传输。而在总线系统中采取基 于串行数据总线体系结构,能将各种信号按照内部程序转换为各种数 据后,通过一条线或两条线将信号一个一个通过串行通信方式进行传 输,在其通信线上传送的是“0”和“1”数字信号,如图1-4(b)所 示。A电脑读取4个开关信号状态,将其转换为“0110”的数据传送给 B电脑,B电脑收到后将其解读,即知现在1、4开关断开,2、3开关 接通。
• 比特率是指每秒传输的比特(bit)数。单位为bit/s,也可表示为bps (bit per second),比特率越高,单位时间传送的数据量越大。计 算机中的信息都用二进制的0和1来表示,其中每个0或1被称为一个 位,即bit(位)。大写B表示Byte即字节,1个字节= 8个位,即 1B=8bit。表示文件大小的单位,一般都使用千字节(KB)来表示文 件的大小。
• 接着,美国汽车工程师协会提出了J1850。
上一页 下一页 返回
1.1 汽车总线系统概述
• 此后,日本也提出了各种各样的总线系统方案,并且丰田、日产、三 菱、本田及马自达公司都已经处于批量生产阶段,但没有统一为以车 身系统为主的控制方式。
• 而在其他国家,特别是欧洲的厂家则采用CAN,同时发表文章介绍 采用大型CAN网络的车型。由于他们在控制系统上都可以采用CAN ,从而充分地证明了CAN在此领域内的先进性。
• 1. 链路(传输媒体)
• 链路指网络信息输出的媒体,分为有线和无线两种类型,目前汽车上 使用的大多数都是有线网络,通常用于局域网的传输媒体有双绞线、 同轴电缆和光纤。
• 1986 年2 月,Robert Bosch 公司在美国汽车工程师协会(SAE) 汽车工程协会大会上介绍了一种新型的串行总线——CAN 控制器局 域网,那是汽车总线系统CAN 诞生的时刻。CAN 全称为Controller Area Network,即控制器局域网,是国际上应用最广泛的现场总线 之一。
• 如图1-4(a)所示,在传统控制电路中,各种控制信号都属于平行关 系,相互之间并没有关联,每个信号都有专属的信号线。因此,如果 需要传输多个信号,就需要多根线进行传输。而在总线系统中采取基 于串行数据总线体系结构,能将各种信号按照内部程序转换为各种数 据后,通过一条线或两条线将信号一个一个通过串行通信方式进行传 输,在其通信线上传送的是“0”和“1”数字信号,如图1-4(b)所 示。A电脑读取4个开关信号状态,将其转换为“0110”的数据传送给 B电脑,B电脑收到后将其解读,即知现在1、4开关断开,2、3开关 接通。
汽车车载网络技术基础PPT课件

详细描述:由于需要大量的连接线,导致成本较高。同 时,由于任意两个节点都可以直接通信,也增加了电磁 干扰和数据碰撞的可能性。
混合型拓扑结构
总结词:结合星型和网状拓扑结构优点 总结词:设计难度大 总结词:成本较高
详细描述:混合型拓扑结构结合了星型和网状拓扑结构 的优点,既具有较好的扩展性,又提高了信息传输效率 。
V2X通信技术的发展
V2X通信技术使得车辆能够与周围环境进行信息交互,从而提高驾驶安全性,车载网络技 术也将朝着这个方向发展。
车载网络面临的挑战
1 2 3
数据安全问题
车载网络涉及到大量的个人信息和车辆数据,如 何保证数据的安全性和隐私性是一个重要的问题。
网络连接稳定性问题
车载网络的连接稳定性是一个关键问题,特别是 在高速行驶和偏远地区,如何保证网络的稳定连 接是一个挑战。
03
云计算和大数据技术在车载网络中的应用
通过云计算和大数据技术,可以实现车载数据的存储和分 析,为驾驶者提供更加个性化的服务。
THANKS FOR WATCHING
感谢您的观看
FlexRay总线协议
总结词
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性 能网络和安全关键应用。
VS
详细描述
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性能 网络和安全关键应用。它具有确定性、灵 活性和可扩展性等特点,能够满足汽车在 安全、舒适和性能方面的要求。FlexRay 总线协议采用时间触发和事件触发两种通 信方式,具有双通道冗余和故障容错能力 。
在车载网络中部署防火墙,过滤掉恶意流量和攻击行 为,防止外部攻击。
入侵检测与防御
实时监测车载网络中的异常行为,及时发现并防御恶 意攻击。
混合型拓扑结构
总结词:结合星型和网状拓扑结构优点 总结词:设计难度大 总结词:成本较高
详细描述:混合型拓扑结构结合了星型和网状拓扑结构 的优点,既具有较好的扩展性,又提高了信息传输效率 。
V2X通信技术的发展
V2X通信技术使得车辆能够与周围环境进行信息交互,从而提高驾驶安全性,车载网络技 术也将朝着这个方向发展。
车载网络面临的挑战
1 2 3
数据安全问题
车载网络涉及到大量的个人信息和车辆数据,如 何保证数据的安全性和隐私性是一个重要的问题。
网络连接稳定性问题
车载网络的连接稳定性是一个关键问题,特别是 在高速行驶和偏远地区,如何保证网络的稳定连 接是一个挑战。
03
云计算和大数据技术在车载网络中的应用
通过云计算和大数据技术,可以实现车载数据的存储和分 析,为驾驶者提供更加个性化的服务。
THANKS FOR WATCHING
感谢您的观看
FlexRay总线协议
总结词
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性 能网络和安全关键应用。
VS
详细描述
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性能 网络和安全关键应用。它具有确定性、灵 活性和可扩展性等特点,能够满足汽车在 安全、舒适和性能方面的要求。FlexRay 总线协议采用时间触发和事件触发两种通 信方式,具有双通道冗余和故障容错能力 。
在车载网络中部署防火墙,过滤掉恶意流量和攻击行 为,防止外部攻击。
入侵检测与防御
实时监测车载网络中的异常行为,及时发现并防御恶 意攻击。
车载网络技术概述

⑨车辆应急预警系统。
图1-18 后座多媒体影音娱乐系统
当行驶中的车辆遇到紧急情况是,可以借助Telematics系统向外界 (其他车辆或道路交通管理部门)发出应急申请,亦可接收来自道路交通 管理部门发布的紧急情况警告及应急响应预案,确保行车安全和道路畅通。
车载网络技术概述 Telematics系统在汽车上的布置(图1-19)可分为前座 系统、后座系统与发动机系统三大子系统。
也就是说,Telematics技术整合了汽车网络技术(也包括 其他移动运输工具内部的网络技术)、无线通信技术、GPS (Global Positioning System,全球定位系统)卫星导航技 术,通过无线网络,随时给行车中的人们提供驾驶、生活、娱 乐所必需的各种信息。
车载网络技术概述
图1-11 Telematics信息交换过程示意图
2.串行传输
车载网络技术概述
图2-14 串行传输 1-发送装置;2-数据;3-接收装置
数据的传输速率(速度)比特率 比特率:每秒传输的数据位数(bit),单位为bit/s(bps)。 波特率:每秒信号变化的次数(B/s)。 在无调制的情况下,波特率精确等于比特率。采用调相技术 时,波特率不等于比特率。
图1-19 Telematics系统在汽车上的布置
车载网络技术概述
1.2 汽车网络技术的应用
车载网络技术概述
图1-22 汽车上的电子控制系统越来越多
车载网络技术概述
图1-23 汽车内部的电线(线束)数量 (装备3个电子控制单元)
图1-24 复杂的、多控制单元的汽车电脑控制系统
随着汽车电子化程度逐年提高,从发动机控制到传动系控 制,从行驶、制动、转向系控制到安全保障系统及仪表报警系 统,从电源管理到为提高舒适性而作的各种努力,使汽车电子 系统形成了一个复杂的大系统(图1-24)。
3智能网联汽车网络通信技术应用
1.LIN总线 LIN(Local Interconnect Network)是面向汽车低端分布式 应用的低成本,低速串行通信总线。它的目标是为现有汽车 网络提供辅助功能,在不需要CAN总线的带宽和多功能的场 合使用,降低成本。 LIN总线包含一个宿主节点和一个或多个从属节点,所有 节点都包含一个被分解为发送和接收任务的从属通讯任务, 而宿主节点还包含一个附加的宿主发送任务,在实时LIN总线 中,通讯总是由宿主任务发起的。LIN总线拓扑图如右图所示。
智能网联汽车网络技术
(2)V2X技术 V2X主要包含vehicle-to-vehicle(V2V),vehicle-to-infrastructure(V2I),vehicle-tonetwork(V2N)以及vehicle-to-pedestrian(V2P),如下图所示。
智能网联汽车网络技术
车载网络技术
除了宿主节点的命名之外,LIN网络中的节点不使用有关系统设置的任何信息。LIN总线上的 所有通讯都由主机节点中的主机任务发起,主机任务根据进度表来确定当前的通讯内容,发送相 应的帧头,并为报文帧分配帧通道,总线上的从机节点接收帧头之后,通过解读标识符来确定自 己是否应该对当前通讯做出响应、做出何种响应(如下图所示)。基于这种报文滤波方式,LIN 可实现多种数据传输模式,且一个报文帧可以同时被多个节点接收利用。LIN总线物理层采用单 线连接,两个电控单元间的最大传输距离为40m。
车载网络技术
在总线上实行“线与”,“0”为显性电平、“1”为隐性电平,当总线有至少一个节点发送 显性电平时,总线呈现显性电平;所有节点均发送隐性电平或者不发送信息时,总线呈隐性电 平,即显性电平起着主导作用。LIN总线报文帧如下图所示。
车载网络技术
由于LIN总线一般最大值在12V左右,因此可以设置示波器的垂直档位为2V/div,时基可以 设置为500μs左右。LIN总线波形如下图所示。
智能网联汽车网络技术
(2)V2X技术 V2X主要包含vehicle-to-vehicle(V2V),vehicle-to-infrastructure(V2I),vehicle-tonetwork(V2N)以及vehicle-to-pedestrian(V2P),如下图所示。
智能网联汽车网络技术
车载网络技术
除了宿主节点的命名之外,LIN网络中的节点不使用有关系统设置的任何信息。LIN总线上的 所有通讯都由主机节点中的主机任务发起,主机任务根据进度表来确定当前的通讯内容,发送相 应的帧头,并为报文帧分配帧通道,总线上的从机节点接收帧头之后,通过解读标识符来确定自 己是否应该对当前通讯做出响应、做出何种响应(如下图所示)。基于这种报文滤波方式,LIN 可实现多种数据传输模式,且一个报文帧可以同时被多个节点接收利用。LIN总线物理层采用单 线连接,两个电控单元间的最大传输距离为40m。
车载网络技术
在总线上实行“线与”,“0”为显性电平、“1”为隐性电平,当总线有至少一个节点发送 显性电平时,总线呈现显性电平;所有节点均发送隐性电平或者不发送信息时,总线呈隐性电 平,即显性电平起着主导作用。LIN总线报文帧如下图所示。
车载网络技术
由于LIN总线一般最大值在12V左右,因此可以设置示波器的垂直档位为2V/div,时基可以 设置为500μs左右。LIN总线波形如下图所示。
常用车载网络系统(CAN)知识讲解

3
常用车载网络系统
学习内容
1
CAN总线
2
LIN总线
3
VAN系统
4
LAN系统
5
MOST总线
6
车载蓝牙系统
4
常用车载网络系统
2.1 CAN总线的工作原理
CAN是Controller Area Network(控制器局域网)的 缩写,是国际标准化的串行通信协议。目前,CAN总线是汽 车网络系统中应用最多、也最为普遍的一种总线技术。
CAN总线的基本系统由多个控制单元和两条数据线组 成,这些控制单元通过所谓收发器(发射-接收放大器)并 联在总线导线上。
图2-21 CAN总线的数据传输与公交车载运乘客相似
12
常用车载网络系统
CAN总线系统采用双绞线进行数据传输。这两根导线 中,一根称为CAN-High导线,另一根导线称为CAN-Low导 线。
在双绞线上,信 号是按相反相位 传输的,这样可 有效抑制外部干 扰。
图2-22 CAN总线的双绞线
13
常用车载网络系统 2.信息的发送与接收
CAN数据总线在发送信息时,每个控制单元均可接收 其他控制单元发送出的信息。在通信技术领域,也把该原 理称为广播。
14
常用车载网络系统
图2-26 单线CAN总线数据传输示意图
21
常用车载网络系统
⑤安全域。安全域(长度为16bit)用于检验数据在传输中是 否出现错误。
22
常用车载网络系统
⑥ 应答域。应答域(长度为2bit)是数据接收器发给数据发 送器的确认信号,表示接收器已经正确、完整地收到了发送 器发送的数据。如果检测到在数据传输中出现错误,则接收 器会迅速通知发送器,以便发送器重新发送该数据。
常用车载网络系统
学习内容
1
CAN总线
2
LIN总线
3
VAN系统
4
LAN系统
5
MOST总线
6
车载蓝牙系统
4
常用车载网络系统
2.1 CAN总线的工作原理
CAN是Controller Area Network(控制器局域网)的 缩写,是国际标准化的串行通信协议。目前,CAN总线是汽 车网络系统中应用最多、也最为普遍的一种总线技术。
CAN总线的基本系统由多个控制单元和两条数据线组 成,这些控制单元通过所谓收发器(发射-接收放大器)并 联在总线导线上。
图2-21 CAN总线的数据传输与公交车载运乘客相似
12
常用车载网络系统
CAN总线系统采用双绞线进行数据传输。这两根导线 中,一根称为CAN-High导线,另一根导线称为CAN-Low导 线。
在双绞线上,信 号是按相反相位 传输的,这样可 有效抑制外部干 扰。
图2-22 CAN总线的双绞线
13
常用车载网络系统 2.信息的发送与接收
CAN数据总线在发送信息时,每个控制单元均可接收 其他控制单元发送出的信息。在通信技术领域,也把该原 理称为广播。
14
常用车载网络系统
图2-26 单线CAN总线数据传输示意图
21
常用车载网络系统
⑤安全域。安全域(长度为16bit)用于检验数据在传输中是 否出现错误。
22
常用车载网络系统
⑥ 应答域。应答域(长度为2bit)是数据接收器发给数据发 送器的确认信号,表示接收器已经正确、完整地收到了发送 器发送的数据。如果检测到在数据传输中出现错误,则接收 器会迅速通知发送器,以便发送器重新发送该数据。
车载网络技术概述
车载网络技术概述
车载网络技术概述
学习内容
1 2 3 汽车网络技术的发展 汽车网络技术的应用 汽车网络标准与协议
车载网络技术概述
车载网络技术概述 一、数据传输方式 根据发送装置向接收装置传输信息时各字节的传输方式 不同,数据传输方式分为并行传输和串行传输两种形式。 1.并行传输
图2-13 并行传输 1—发送装置;2—数据;3—接收装置;MSB—最高值数位;LSB—最低值数位
⑥车况掌握。
图1-17 自适应巡航系统监测前、后车辆之间的车距
车辆性能与车况的自动监测、传输,进行多地、远程 “专家会诊”,指导车辆维修等。
⑦个人化信息接收与发布。收发电子邮件与个人化信息等。
车载网络技术概述 ⑧多媒体影音娱乐信息接收。 高画质与高音质的视听设备、游戏机、上网机、个人行 动信息中心、随选视频资讯等(图1-18)。
车载网络技术概述 2.串行传输
图2-14 串行传输 1-发送装置;2-数据;3-接收装置
数据的传输速率(速度)比特率 比特率:每秒传输的数据位数(bit),单位为bit/s(bps)。 波特率:每秒信号变化的次数(B/s)。 在无调制的情况下,波特率精确等于比特率。采用调相技术 时,波特率不等于比特率。 网速:4 Mbps 1Gbps=1000Mbps=1000*1000bps
车载网络技术概述
目前汽车上:
控制单元内部线路中使用并行数据传输方式, 控制单元外部传输信息则大都以串行传输方式进行。
串行数据传输既可以采用同步传输方式,也可以采用异 步传输方式。Fra bibliotek载网络技术概述
串行数据传输:同步传输方式,异步传输方式。 3.同步数据传输 使用一个共同的时钟脉冲发生器可保持发送装置和接收 装置时间管理的同步性。这种方式就是同步传输方式。
车载网络技术概述
学习内容
1 2 3 汽车网络技术的发展 汽车网络技术的应用 汽车网络标准与协议
车载网络技术概述
车载网络技术概述 一、数据传输方式 根据发送装置向接收装置传输信息时各字节的传输方式 不同,数据传输方式分为并行传输和串行传输两种形式。 1.并行传输
图2-13 并行传输 1—发送装置;2—数据;3—接收装置;MSB—最高值数位;LSB—最低值数位
⑥车况掌握。
图1-17 自适应巡航系统监测前、后车辆之间的车距
车辆性能与车况的自动监测、传输,进行多地、远程 “专家会诊”,指导车辆维修等。
⑦个人化信息接收与发布。收发电子邮件与个人化信息等。
车载网络技术概述 ⑧多媒体影音娱乐信息接收。 高画质与高音质的视听设备、游戏机、上网机、个人行 动信息中心、随选视频资讯等(图1-18)。
车载网络技术概述 2.串行传输
图2-14 串行传输 1-发送装置;2-数据;3-接收装置
数据的传输速率(速度)比特率 比特率:每秒传输的数据位数(bit),单位为bit/s(bps)。 波特率:每秒信号变化的次数(B/s)。 在无调制的情况下,波特率精确等于比特率。采用调相技术 时,波特率不等于比特率。 网速:4 Mbps 1Gbps=1000Mbps=1000*1000bps
车载网络技术概述
目前汽车上:
控制单元内部线路中使用并行数据传输方式, 控制单元外部传输信息则大都以串行传输方式进行。
串行数据传输既可以采用同步传输方式,也可以采用异 步传输方式。Fra bibliotek载网络技术概述
串行数据传输:同步传输方式,异步传输方式。 3.同步数据传输 使用一个共同的时钟脉冲发生器可保持发送装置和接收 装置时间管理的同步性。这种方式就是同步传输方式。
汽车总线及车载网络技术

主节点需要,从节点不 需要
每个节点都需要
• 2. LIN总线系统的结构
LIN总线
• (1)LIN的网络结构
• LIN总线上的最大电控单元节点数为16个,系统 中两个电控单元节点之间的最大距离为40m。
• LIN总线网络由一个主节点一个或多个从节点组 成。所有节点都包含一个从任务(Slave Task ),负责消息的发送和接收;主节点还包含一 个主任务(Master Task),负责启动LIN总线 网络中的通信。
• 在MOST总线中,各个终端设备(节点、控制 单元)之间通过一个数据只沿一个方向传输的 环形总线连接,音频、视频信息在环形总线上 循环,并由每个节点(控制单元)读取和转发 。各个控制单元之间通过光导纤维相互连接而 形成一个封闭环路,因此每个控制单元拥有两 根光导纤维,一根光导纤维用于发射器,一根 光导纤维用于接收器。
CAN总线
• CAN网络拓扑可以根据几何图形的形状分为五种类型:总线拓扑、环形拓扑、星型拓扑、网络拓扑和树 型拓扑,这些形状也可以混合形成混合拓扑。因为电动汽车的网络特性可以概括为通信距离短、网络复 杂度要求低、可扩展性要求高、实施可靠性要求高。
星形拓扑
网络拓扑
环形拓扑
树形拓扑
图 6-2 CAN 网络拓扑形式
CAN总线
• CAN数据传输线是双向串行总线,大都采用具 有较强抗干扰能力的双绞线,分为CAN-H线和 CAN-L线,两线缠绕绞合在一起,其绞距为 20mm,横截面积为0.35mm2或0.5mm2
CAN总线
• 终端电阻的作用是防止信号在传输线终端产生反射波,而使正常传输的数据受到干扰。
CAN总线
总线型拓扑
CAN总线
• CAN总线系统的总体构成如图6-3所示,主要由 若干个节点(电控单元)、两条数据传输线( CAN-H和CAN-L)及终端电阻组成。
汽车CAN总线详细教程课件

刹车系统控制
刹车系统的刹车力度、刹车踏板位置等信息 也可以通过CAN总线传输到制动控制单元, 以提高制动效果。
CAN总线的优势
节省线束
由于CAN总线是数字通讯,所以它能够将多个控制单 元连接在一起,减少了许多线束的使用。
高效通讯
CAN总线的通讯速率高,可以在短时间内传输大量的 数据。
稳定性好
CAN总线具有很高的抗干扰能力,并且具有自我检测 和修复功能,所以它的稳定性非常好。
分析CAN总线数据
对监测到的数据进行深入分析,包括 数据类型、字节顺序、校验和等,确 保数据的正确性和可靠性。
使用示波器进行调试和测试
连接示波器
调整示波器设置
将示波器与汽车CAN总线相连接,选择合 适的通道和触发条件。
根据CAN总线的波特率和数据格式,调整 示波器的采样速率、时基等参数。
观察信号波形
汽车底盘控制模块应用实例
总结词
汽车底盘控制模块是CAN总线在汽车上的另一个应用 ,用于实现底盘的智能化控制和监测。
详细描述
CAN总线在底盘控制模块中,主要负责传输底盘传感 器数据和控制指令,包括刹车状态、转向角度、悬挂 高度等,以及ECU对底盘的控制指令,如ABS防抱死 系统、ESP电子稳定系统等。通过CAN总线,底盘控 制模块可以实时与其他控制模块进行通信,实现底盘 的智能化控制和监测。
VS
错误恢复
当错误检测机制检测到错误时,CAN总 线采取以下措施进行错误恢复:发送错误 标志:发送节点在检测到错误时立即在总 线上发送一个错误标志,以通知其他节点 发生了错误。接收节点在接收到错误标志 后,将接收到的数据丢弃并向发送节点发 送一个否定应答。
03
汽车CAN总线协议分析
CAN协议标准及版本
刹车系统的刹车力度、刹车踏板位置等信息 也可以通过CAN总线传输到制动控制单元, 以提高制动效果。
CAN总线的优势
节省线束
由于CAN总线是数字通讯,所以它能够将多个控制单 元连接在一起,减少了许多线束的使用。
高效通讯
CAN总线的通讯速率高,可以在短时间内传输大量的 数据。
稳定性好
CAN总线具有很高的抗干扰能力,并且具有自我检测 和修复功能,所以它的稳定性非常好。
分析CAN总线数据
对监测到的数据进行深入分析,包括 数据类型、字节顺序、校验和等,确 保数据的正确性和可靠性。
使用示波器进行调试和测试
连接示波器
调整示波器设置
将示波器与汽车CAN总线相连接,选择合 适的通道和触发条件。
根据CAN总线的波特率和数据格式,调整 示波器的采样速率、时基等参数。
观察信号波形
汽车底盘控制模块应用实例
总结词
汽车底盘控制模块是CAN总线在汽车上的另一个应用 ,用于实现底盘的智能化控制和监测。
详细描述
CAN总线在底盘控制模块中,主要负责传输底盘传感 器数据和控制指令,包括刹车状态、转向角度、悬挂 高度等,以及ECU对底盘的控制指令,如ABS防抱死 系统、ESP电子稳定系统等。通过CAN总线,底盘控 制模块可以实时与其他控制模块进行通信,实现底盘 的智能化控制和监测。
VS
错误恢复
当错误检测机制检测到错误时,CAN总 线采取以下措施进行错误恢复:发送错误 标志:发送节点在检测到错误时立即在总 线上发送一个错误标志,以通知其他节点 发生了错误。接收节点在接收到错误标志 后,将接收到的数据丢弃并向发送节点发 送一个否定应答。
03
汽车CAN总线协议分析
CAN协议标准及版本
常用车载网络系统(CAN)

25
常用车载网络系统
2.3 错误帧
错误帧的功能是对所发送的数据进 行错误检测、错误标定及错误自检。 错误帧由两个不同的域组成,第1个 域为不同控制单元提供错误标志的叠 加,第2个域是错误界定符。 错误标志包括主动错误标志和被动 错误标志两种形式。
26
常用车载网络系统
2.4 过载帧
接收器在电路尚未准备好或在间歇 域期间检测到一个“显性”位时,会 发送过载帧,以延迟数据的传送。过 载帧包括过载标志和过载界定符两个 域。
10
常用车载网络系统
4.CAN总线的自诊断功能
①控制单元具有自诊断功能,通过自诊断功能还可识别出与 CAN总线相关的故障。 ②用诊断仪读出CAN总线故障记录之后,即可按这些提示信 息按图索骥、顺藤摸瓜,快速、准确地查寻并排除故障。 ③控制单元内的故障记录用于初步确定故障,还可用于读出 排除故障后的无故障说明,即确认故障已经被排除。如果想 要更新故障显示内容,必须重新起动发动机。 ④CAN总线正常工作的前提条件是车辆在任何工况均不应有 CAN总线故障记录。
电阻状态 高阻抗 低阻抗
总线电平 1 0
32
2)多个收发器与总线导线的耦合 常用车载网络系统
当有多个收发 器与总线导线耦合 时,总线的电平状 态将取决于各个收 发器开关状态的逻 辑组合。
收发器A 1 1 1 1 0 0 0 0 收发器B 1 1 0 0 1 1 0 0
图2-32
3个收发器接到一根总线导线上
28
常用车载网络系统 4 CAN总线系统元件的功能
CAN总线系统元件主要由K-线、控制单元、CAN构件、 收发器等组成。
1.K-线
K-线用于在CAN总线系统自诊断时连接汽车故障检测仪 (如VAS5051),属于诊断用的通讯线。
汽车网络技术-第2章 CAN总线
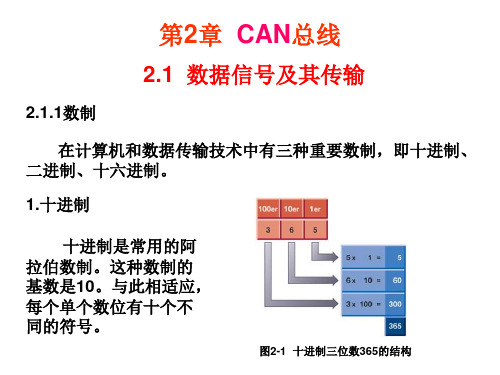
图2-4 数字信号 U—电压;t—时间
3.二进制信号 “Bi”一词来源于希腊语,表示“2”。因此,一个二进制 信号只能识别两种状态,即0和1,或高和低。如车灯点亮或 车灯未亮;继电器触电断开或继电器触点闭合;供电或未供 电;车门打开或车门关闭,等等。 每个符号、图 片甚至声音都可由 特定顺序的二进制 字符来表述,如 10010110。通过这 些二进制编码,计 算机或控制单元可 以处理信息或将信 息发送给其它控制 单元。
3.CAN总线的传输速率 目前,CAN总线系统中的信号是采用数字方式经铜导线 传输的,其最大稳定传输速率可达1000Kbit/s (1Mbit/s)。
大众和奥迪公司将最大标准传输速率规定为500Kbit/s, 并将CAN总线系统分为三个专门的系统:
①驱动CAN总线(高速),亦称动力CAN总线,其标准传输 速率为500Kbit/s,可基本满足实时要求,主要用于发动机、 变速器、ABS、转向助力等汽车动力系统的数据传输。 ②舒适CAN总线(低速),其标准传输速率为100 Kbit/s, 主要用于空调系统、中央门锁(车门)系统、座椅调节系统 的数据传输。 ③信息CAN总线(低速),其标准传输速率为100Kbit/s,主 要用于对时间要求不高的领域,如导航系统、组合音响系统、 CD转换控制等。
第2章 CAN总线
2.1 数据信号及其传输
2.1.1数制
在计算机和数据传输技术中有三种重要数制,即十进制、 二进制、十六进制。 1.十进制 十进制是常用的阿 拉伯数制。这种数制的 基数是10。与此相适应, 每个单个数位有十个不 同的符号。
图2-1 十进制三位数365的结构
2.二进制 二进制是数据处理中最常用的数制之一。在二进制中只 有两个数字值:0 和1,或接通或关闭,或高电压或低电压, 即所谓的二进制符号或位。在通信领域,也把这两个值称为 逻辑0和逻辑1。 每个数据信号都由一个二进制符号(位)的排列构成, 如1001 0110。
汽车车载网络技术-第二章-车载网络基础知识
第三节 常用基本术语
7.报文及帧 帧有两种不同的帧格式:具有11位识别符的帧称为标准帧,具有29位识别符 的帧称为扩展帧。帧按照携带的信息类型可分为以下4种帧格式: (1)数据帧 数据帧携带数据,将数据从发送器传输到接收器。 (2)远程帧 远程帧由总线单元发送,用于请求发送具有相同识别符的数据 帧。 (3)过载帧 过载帧用于在先行和后续的数据帧(或远程帧)之间提供一附 加的延时。 (4)错误帧 任何单元检测到总线错误,就发出错误帧。
三、现场总线的几种常见类型
1.FF FF的体系结构参照ISO/OSI参考模型的第1、2、7层协议,即物理层、数据链路 层和应用层。另外增加了用户层。FF分为低速H1总线和高速H2总线两种。 2.Profibus Profibus有3种类型,即分散化的外围设备(Profibus-DP)、现场总线报文规范 (Profibus-FMS)和过程自动化(Profibus-PA)。 3.LonWorks 采用的LonTalk协议被封装在Neuron芯片中,内含3个8位微处理器,分别用于负 责媒体访问控制、网络处理和应用处理。通常将局部操作网络及其技术统称为 LonWorks技术。
二、通信协议标准
2.车载网络协议标准 (1)A类总线协议标准 面向传感器和执行器控制的低速网络,数据传输 速率通常只有1~10kbit/s。网络协议种类主要有LIN、UART(Universal Asynchronous Receiver/Transmitter)和CCP等 (2)B类总线协议标准 面向独立电控单元之间数据共享的中速网络,传输 速率一般为10~100kbit/s。主要应用于车辆电子信息中心、故障诊断、SRS 和组合仪表等,以减少冗余的传感器和其他电子部件 (3)C类总线协议标准 面向高速、实时闭环控制的多路传输,最高传输速 率可达1Mbit/s,主要用于发动机、ABS/ASR、悬架等控制。 (4)D类总线协议标准 D类网络称为智能数据总线(IDB),主要面向信息和 多媒体系统等。D类网络协议的速率为250kbit/s~400Mbit/s。
《车载网络技术》课件

解决方案一
解决方案二
加强网络安全防护,建立完善的安全机制和体系
车载网络系统升级和维护问题
THANKS
感谢观看
总结词
比较不同车载网络拓扑结构的优缺点,根据实际需求选择合适的拓扑结构。
总结词
在选择车载网络拓扑结构时,需要考虑网络规模、通信需求、可靠性和稳定性等因素。星型拓扑结构适用于小型车队或特定场景下的车辆通信;网状拓扑结构适用于大规模车队或需要车辆间直接通信的场景;混合拓扑结构则能够更好地平衡网络性能和稳定性,适用于各种规模的车队和不同通信需求的场景。在实际应用中,应根据具体需求和场景选择合适的拓扑结构。
总结词
01
车载网络技术的发展经历了多个阶段,从最初的点对点连接到现在的高度集成化、智能化、网联化的车载网络系统。
详细描述
02
车载网络技术的发展历程可以分为以下几个阶段
1. 点对点连接阶段
03
早期的汽车电子部件之间的连接采用简单的点对点连接方式,每个电子部件都需要单独的线缆连接到控制器或传感器上,这种方式布线复杂、成本高、扩展性差。
02
车载网络通信协议
CAN总线是一种串行通信协议,主要用于汽车内部传感器和执行器的通信。
概述
高可靠性、灵活性和实时性,支持分布式控制,节点间数据共享。
特点
发动机控制、刹车系统、气囊控制等。
应用
LIN总线是一种低成本的串行通信协议,用于汽车中的辅助系统。
概述
低成本、高可靠性和实时性,适用于单个节点间的通信。
国际标准
ISO 21434道路车辆网络安全管理体系
05
车载网络发展趋势与挑战
随着通信技术的不断发展,车载网络技术也在不断升级,从CAN总线到以太网,车载网络的带宽和传输速度得到了大幅提升。
解决方案二
加强网络安全防护,建立完善的安全机制和体系
车载网络系统升级和维护问题
THANKS
感谢观看
总结词
比较不同车载网络拓扑结构的优缺点,根据实际需求选择合适的拓扑结构。
总结词
在选择车载网络拓扑结构时,需要考虑网络规模、通信需求、可靠性和稳定性等因素。星型拓扑结构适用于小型车队或特定场景下的车辆通信;网状拓扑结构适用于大规模车队或需要车辆间直接通信的场景;混合拓扑结构则能够更好地平衡网络性能和稳定性,适用于各种规模的车队和不同通信需求的场景。在实际应用中,应根据具体需求和场景选择合适的拓扑结构。
总结词
01
车载网络技术的发展经历了多个阶段,从最初的点对点连接到现在的高度集成化、智能化、网联化的车载网络系统。
详细描述
02
车载网络技术的发展历程可以分为以下几个阶段
1. 点对点连接阶段
03
早期的汽车电子部件之间的连接采用简单的点对点连接方式,每个电子部件都需要单独的线缆连接到控制器或传感器上,这种方式布线复杂、成本高、扩展性差。
02
车载网络通信协议
CAN总线是一种串行通信协议,主要用于汽车内部传感器和执行器的通信。
概述
高可靠性、灵活性和实时性,支持分布式控制,节点间数据共享。
特点
发动机控制、刹车系统、气囊控制等。
应用
LIN总线是一种低成本的串行通信协议,用于汽车中的辅助系统。
概述
低成本、高可靠性和实时性,适用于单个节点间的通信。
国际标准
ISO 21434道路车辆网络安全管理体系
05
车载网络发展趋势与挑战
随着通信技术的不断发展,车载网络技术也在不断升级,从CAN总线到以太网,车载网络的带宽和传输速度得到了大幅提升。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.2 几种车用总线通信技术 2. I2C总线通信
➢ I2C总线Inter Integrated Circuit Bus的缩写, 用于芯片间串行通信的总线。
➢ I2C总线以两根连线实现全双工同步数据 传送,实现两个器件之间地址和数据信息 的双向传送,具有引出线少、可靠性高、 抗干扰能力强等优点。
2.2 几种车用总线通信技术
2.2 几种车用总线通信技术 4. LIN总线通信
➢局部互连网络LIN(Local Interconnect Network)是一种将简单控制设备连接起来 的串行通信网络,主要用于实现汽车中的 分布式电子系统控制。
➢ LIN 总线是一种辅助的总线网络,在不需 要CAN 总线的带宽和多功能的场合,比如 智能传感器和其他装置之间的通信,使用 LIN 总线可大大节省成本。
2.2 几种车用总线通信技术
➢ 并行:速度快、效率高,但是如果通信 双方距离较远,并行传送会使传输网络复 杂,投资增加。
➢ 串行:按位顺序地传送,传送速度慢、 效率低,但它可以大幅度的减少通信系统 的投资。所以,在通信距离较远时,必须 采用串行通信。
2.2 几种车用总线通信技术
1. 串口通信
➢为了数据采集或与其它控制系统进行数据 交换,车用ECU经常采用串口通信的方式, 其中RS232C协议是目前最为常用的一种串 行通信接口。
(3)计算机网络的广泛应用和智能交通系 统的应用,使汽车成为互联网上的终端。
ITS:汽车具有接收和提供相关信息的功能, 如接收定位信号、提供地理信息服务、接 收管理信息、发送本车状态信息、进行安 全服务请求等。
2.1.1 车用总线发展的背景及必 Nhomakorabea性2. 车用总线的特点
(1)汽车网络系统要求可靠、廉价,与系 统一体化、线路简单和实时性好。
(2)汽车网络系统的特点是范围小、节点 数少,多数应用要求的传输速度不高。
2.1.1 车用总线发展的背景及必要性
(3)车辆引入总线技术有如下优点:
① 减少了线束的数量和体积,提高了电子 系统的可靠性,维修容易、安装简便。
② 由于采用了通用传感器,通过网络进行 数据通信,可以达到消除冗余传感器并实 现数据共享的目的。
LIN
ByteFlight
Flexray, TTx
Time Triggered (TDMA) Fault Tolerant
2 x 2 Wire/Optical
D2B, MOST
Token Ring Optical Bus
High Speed CAN
Arbitration (CSMA) Event Triggered, Dual Wire
2.2 几种车用总线通信技术 5. 计算机网络与通信技术基础
(1)计算机网络基础知识
❖ 计算机网络:具有资源共享和通信功 能的计算机系统的集合体。
汽车上的网络,通信的含义比较重一些。 它们是按照一定的通信协议连接的一些控 制单元或智能装置,控制信号、传感器信 号通过网络传送到目的系统。
Bluetooth
Wireless Bus
Low Speed CAN
Arbitration Fault Tolerant, Dual Wire
J1850
Class A
Class B
Class C
Multi-Media
2.1.2 车用总线的分类及发展概况
➢ 汽车工程协会(SAE)将汽车数据传输网 络划分为三类:
➢信号的传输是由串行数据线SDL和串行时 钟线SCL两条线双向传输,两线均由CPU引 出,其它单元电路均挂接在SCL和SDL上。
IIC电路图
2.2 几种车用总线通信技术 3. CAN总线通信
➢德国博世公司于80年代初,为了解决众多 传感器与执行装置之间的数据交换而开发 的一种串行通信协议。
➢由于其良好的性能及独特的设计,是车辆 领域中应用最广泛的一种。
(1)A类 是面向传感器、执行器的低速网络,该类
网络对实时性要求不高,位速率一般为1~ 10Kbit/s,主要应用于电动门窗、座椅调 节、灯光照明等控制,采用LIN。
2.1.2 车用总线的分类及发展概况
(2)B类 主要面向独立模块间的数据共享,是中速
网络,该网络适用于对实时性要求不高的 通讯场合,以减少冗余传感器和其它电子 部件,主要应用于车辆信息中心、故障诊 断、仪表显示等系统,采用低速CAN。
第二章 车用总线技术
2.1.1 车用总线发展的背景及必要性
(2)随着汽车电子化的深入,以网络通信 为基础的线控技术将在车上普遍应用。
用电子信息的传送取代机械的或液压的 或气动的系统连接的传动部分。
人机
电信号
执行机构
接口 (电路或无线信号) 传感机构
功能装置
线控系统基本原理图
2.1.1 车用总线发展的背景及必要性
2.1.1 车用总线发展的背景及必要性
③ 改善了车辆系统设计和配置的灵活性, 实现车辆各个装置的模块化。
④ 使用网络将车辆各个电子装置连接起 来,让车辆真正成为系统控制的整体对 象,利于车辆动力性、排放性、操纵性、 经济性和安全性的改进。
2.1.2 车用总线的分类及发展概况
美国汽车工程师协会(SAE)目前已确定 通讯网络的三个类别:
控制等系统
2.1.2 车用总线的分类及发展概况
➢ 三类网络应用范围不同,且采用不同的 协议。
➢ 尽管新开发出的总线网络通信速度越来 越高,但是还没有一个通信网络可以完 全满足未来汽车的所有成本和性能要求; 因此,在车辆的各功能模块中采用多种 协议以实现未来车辆上的联网。
2.2
几种车用总线通信技术
(3)C类 主要面向高速、实时闭环控制的多路传输
网,典型应用是发动机控制、悬架控制、 ABS等实时控制系统,采用高速CAN。
Data Rate [Bit/s]
Network Protocols in
Embedded (Automotive)
Systems
25 M 10 M
1M 125 K
20 K
类 别
对象
传输速度 kb/s
应用范围
A
面向传感器/执行器 控制的低速网络
<10
灯光照明、电动门窗、 座椅调节等系统
B
面向独立模块间数据 共享的中速网络
10~125
车辆电子信息中心、安 全气囊、故障诊断、仪
表显示等系统
面向高速、实时闭环
牵引控制、先进发动机
C 控制的高速传输网 125 ~1000 控制、悬架控制、ABS