主流四轴配置
四轴常用配置及常见电机动力转速
15楼:ruoxi66贡献:
dji2212 dji1038 F450 3S 2200兔子带视频图传1100克留空9分钟
同配3s5300留空20分钟
郎予x2212kv980。1047碳F450兔子带视频图传1200克留空7分
A2212,KV2200:
本店5043桨,11V 21.1A,18800转,10V 19.1A,17600转。(400-650克级别,高速飞翼后推像真机用的配置。3S 15-20C 1500-2000mAh)
GWS8040HD桨,8V 21.5A,11970转,7V 17.8A,10950转。
A2212,KV1400:
朗宇X2216 kv900
飞腾30a
10寸
3s或4s锂电
3S4500mah
1100-1300g》》》》12分钟左右(估量时间略有误差,桨,电机,机架等问题影响)
-----------------------------------
机架450/550
朗宇V2216 kv800
飞腾30a
10寸11寸
3s或4s锂电
xxd1510
好盈10a
桨5045
电池3a1300mah或2s1000mah
-------------------------------------------
13楼:hist24571贡献:
老油条550异形机架
郎宇2212 980kv
好赢四合一
1045
DuPu4200 3S
1280克
12-14分钟
3S4500mah
1100-1300g》》》》15分钟左右(估量时间略有误差,桨,电机,机架等问题影响)
250旋转四轴连接板参数

250旋转四轴连接板参数
四轴连接板是指用于连接四个旋翼的飞行器的主要结构部件。
它的参数通常包括材质、尺寸、重量、承载能力等方面。
首先,让我们来看材质。
四轴连接板通常采用轻质但坚固耐用的材料,如铝合金、碳纤维等。
这些材料能够提供足够的强度和刚性,同时又能保持整体结构的轻量化。
其次是尺寸和重量。
尺寸和重量是设计四轴连接板时需要考虑的重要参数。
一般来说,连接板的尺寸需要根据飞行器的整体设计来确定,以确保连接板能够稳固地连接四个旋翼。
而连接板的重量也需要尽量轻量化,以减少飞行器的整体重量,提高飞行性能。
再者是承载能力。
连接板作为飞行器的主要结构部件之一,其承载能力直接关系到飞行器的安全性能。
设计连接板时需要考虑飞行器的整体重量以及飞行时可能承受的各种力,确保连接板能够承受这些力并保持稳固连接。
除此之外,还有一些其他可能的参数,比如表面处理方式(如阳极氧化、喷涂等)、安装方式(螺栓连接、焊接等)等,这些参
数都会影响到连接板的性能和适用范围。
综上所述,四轴连接板的参数涉及材质、尺寸、重量、承载能力等多个方面,设计时需要综合考虑飞行器的整体设计要求和使用环境,以确保连接板能够满足飞行器的需求并保证飞行安全。
MATRIX 四轴参数
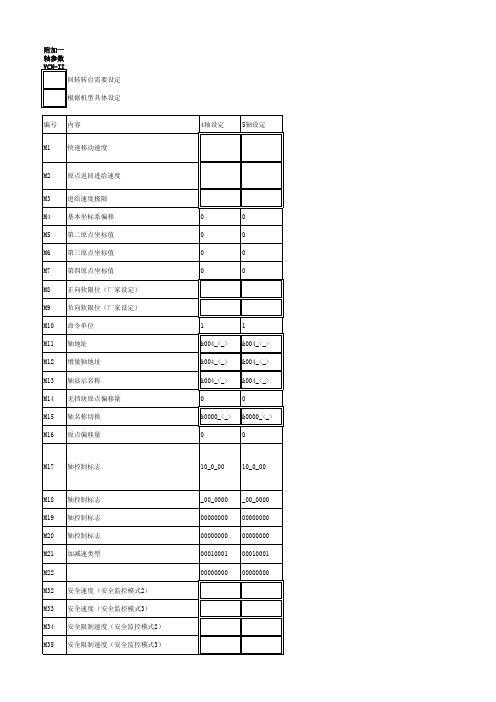
&004_<_> &004_<_>
&004_<_> &004_<_>
0
0
&0000_<_> &0000_<_>
0
0
10_0_00
10_0_00
_00_0000 _00_0000 00000000 00000000 00000000 00000000 00010001 00010001 00000000 00000000
BIT0=1(快速移动:线性加减速),BIT4=1(切削进给:线性加减速)
[360X[2200/卡盘直径(mm)/3.14],参见安全速度设定值一览表 [360X[5500/卡盘直径(mm)/3.14],参见安全速度设定值一览表 [360X[2000/卡盘直径(mm)/3.14],参见安全速度设定值一览表 [360X[5000/卡盘直径(mm)/3.14],参见安全速度设定值一览表
S10 倾斜转台回转轴
0
S11 倾斜转台角位置
0
S12
倾斜转台回转轴(用于自动编程原点计算功 能)
0
S13 G00到位宽度
200
1000 0 0 0 0 0 0 0 0 0 200
S14 G01到位宽度
50
50
S15 参考点修正量(双向螺距误差补偿)
0
0
S16 非平衡轴扭矩补偿
0
0
SA44 主轴放大器轴波段开关设定
M17 轴控制标志
M18 轴控制标志 M19 轴控制标志 M20 轴控制标志 M21 加减速类型 M22 M32 安全速度(安全监控模式2) M33 安全速度(安全监控模式3) M34 安全限制速度(安全监控模式2) M35 安全限制速度(安全监控模式3)
四轴
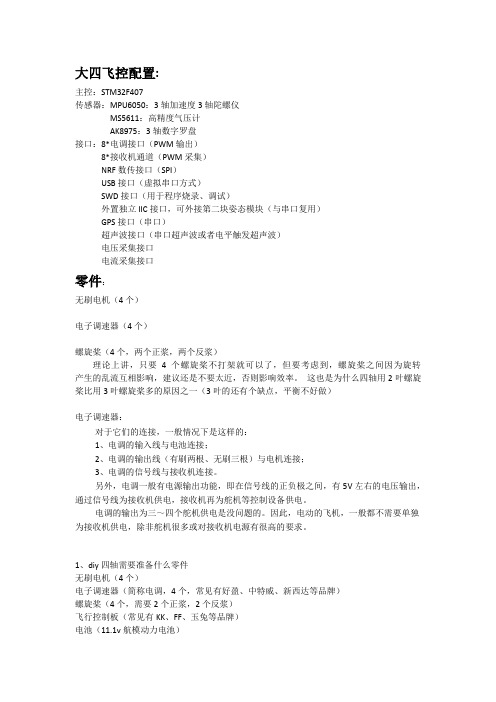
大四飞控配置:主控:STM32F407传感器:MPU6050:3轴加速度3轴陀螺仪MS5611:高精度气压计AK8975:3轴数字罗盘接口:8*电调接口(PWM输出)8*接收机通道(PWM采集)NRF数传接口(SPI)USB接口(虚拟串口方式)SWD接口(用于程序烧录、调试)外置独立IIC接口,可外接第二块姿态模块(与串口复用)GPS接口(串口)超声波接口(串口超声波或者电平触发超声波)电压采集接口电流采集接口零件:无刷电机(4个)电子调速器(4个)螺旋桨(4个,两个正浆,两个反浆)理论上讲,只要4个螺旋桨不打架就可以了,但要考虑到,螺旋桨之间因为旋转产生的乱流互相影响,建议还是不要太近,否则影响效率。
这也是为什么四轴用2叶螺旋桨比用3叶螺旋桨多的原因之一(3叶的还有个缺点,平衡不好做)电子调速器:对于它们的连接,一般情况下是这样的:1、电调的输入线与电池连接;2、电调的输出线(有刷两根、无刷三根)与电机连接;3、电调的信号线与接收机连接。
另外,电调一般有电源输出功能,即在信号线的正负极之间,有5V左右的电压输出,通过信号线为接收机供电,接收机再为舵机等控制设备供电。
电调的输出为三~四个舵机供电是没问题的。
因此,电动的飞机,一般都不需要单独为接收机供电,除非舵机很多或对接收机电源有很高的要求。
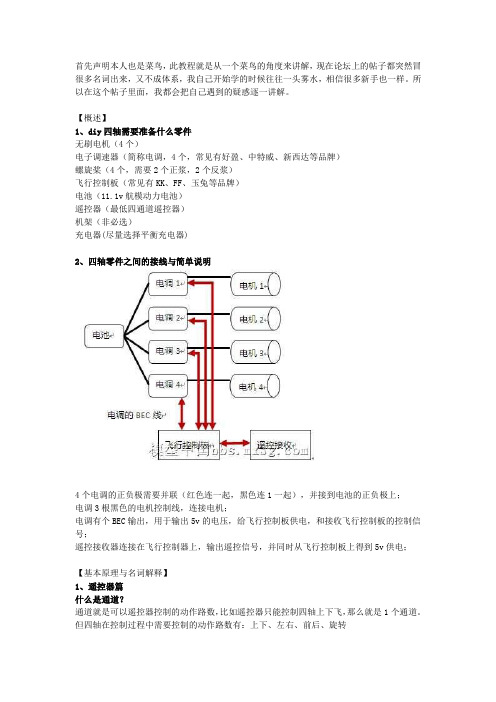
1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)飞行方式:垂直运动图(a)中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
新代四轴参数
新代四轴的参数包括以下方面:
1. 型号:通常包括制造商信息和一系列数字或字母。
2. 尺寸:长度、宽度和高度。
3. 额定负载:指在其最大扭矩下能承受的重量。
4. 重量:不包括其他部件的本身的重量。
5. 最高旋转速度:指能在一分钟内完成的最大旋转次数。
6. 最大扭矩:指能承受的最大力矩。
7. 重复定位精度:指能重复实现的最小旋转角度。
8. 旋转角度:指能够旋转的角度范围。
9. 立卡压力:指能够承受的最大力。
此外,新代四轴的参数还包括最大飞行时间、最大飞行距离、最大飞行速度等,。
四轴飞行器的基本相关知识

四轴飞行器的基本相关知识:四轴,顾名思义就是有四根轴的飞行器,它可以垂直起降,但与直升机又大不相同,是这几年来迅速兴起的一种飞行器本教程制作的是轴距550mm的1kg级别四轴飞行器,可以满足航拍(平民级别)等一系列需求,载重余量较大,扩展性也高。
组成部分:无刷电机*4无刷电调*4飞控板*1电池遥控器四轴机架名词解释:无刷电机:指航模用的三相交流无刷电机,低端品牌有新西达,好一点的有朗宇等;在这里我们选择2212级别kv850-1050之间的无刷电机(想知道具体是什么样的电机?TB一下“2212 kv1000”)很多人会问为什么不用直流电机?第一马力不够;第二自重太大;第三寿命太短;第四转速太高;第五效率低下;第六实践证明直流电机不适合做四轴动力。
不要和我说空心杯,那是玩具四轴用的。
无刷电调:即输出三相交变电流的电子调速器因为我们用电池供电,输出的是直流,需要经电子调速器(简称电调)转换成三相交流电。
同时电子调速器可以接受遥控信号从而调整电机转速。
这里我们选用20A ~30A 的电调,同样也有低端电调比如新西达,建议入门的话采用好盈20A电调。
(想了解更多有关电调?TB一下“无刷电调20A”)继续刚才的名词解释:飞控板:即飞行控制板,是飞行器的灵魂!!飞控板的基本功能就是协调四个电机的转速,比如要悬停,它就不停修正各个电机转速达到悬停,此时你不需要手动修正就可以问问地悬停了(我们称为自稳模式);要前进,则四轴后方的电机转速增加,四轴被“顶”向前;后退,左移,右移同理;要旋转,则通过调整对角两个电机转速实现,这个以后再说。
一般飞控板除了自稳之外,还各自支持不同功能,如航拍云台控制、led夜航灯、gps模块等。
入门可以选择玉兔飞控、mmc10(FF)飞控等,价格便宜,也相对容易调试。
友情提醒:千万不要贪便宜去买KK飞控,你会后悔死的;也不要买MWC!!图为玉兔飞控接下来讲讲电池。
我们用锂聚合物电池,而且是大容量锂聚合物,而且是20倍放电电池,而且是三片电芯串联,也就是3.7*3=11.1V电压!哪里去买到这样的电池,还要自己串联?淘宝已经给你准备好了。
机械键盘“四轴”详解,看完你就是大神

机械键盘“四轴”详解,看完你就是大神
以最常见的黑轴、青轴、茶轴、红轴为例,同款键盘各个轴体区别主要体现在:下压力量、声音、和段落感,接下来我们借用一张图表来体现它们的区别:
名词讲解
1、下压力量:也就是按下按键使按键生效需要的重量
2、声音:也就是按键按下生效产生的声音
3、段落感:即按键途中产生的顿挫感
从上图中,可以看到黑轴跟青轴下压力量并无差别,红轴跟茶轴也一致,但黑轴跟红轴相比,红轴的下压力量会小一点,但黑轴的声音却小一些,至于段落感,除茶轴外,黑轴、青轴、红轴都没有。
所以大家在选购机械键盘时可以遵从以下建议(建议依据实际使用情况自行选购):
●如果是妹纸选购机械键盘,推荐红轴或茶轴,使用起来更轻松。
●如果是一个游戏玩家,红轴是首选,指力强的可以考虑下黑轴。
●如果你喜欢清脆的声音,选青轴;感觉青轴太吵的话,茶轴是一个很均衡的选择。
小编同款红轴机械键盘
至于小编自己的选择嘛,就是玛雅之光游戏服务机械键盘-cherry 红轴!
另外小编将怀着沉痛的心情告诉大家一个好消息,这款机械键盘降价啦!比小编买得还便宜!。
精雕机大小型号对照表

精雕机大小型号对照表DS-M4四轴首饰雕刻机产品配置参数表详细配置情况(总价内已包括)(1)控制系统标配为维宏系统(2)日本松下交流数字伺服电机(3)合资电主轴1.5KW. 2000/RPM,手动换刀(4)ER20弹簧夹头,刀具最大夹持直径13毫米(5)台湾上银P级精密滚动直线导轨, C3滚珠丝杆(6)日本NSK精密轴承P4级(7)行程400*300*110工作台400*300(mm)(8)工作台负重50公斤(9)主轴端面到工作台装卡高度0-150 (0)(10)最大移动速度15米/分钟,最大加工速度10米/分钟(11)定位精度 0.01m/300(12)重复定位精度0. 05m/300(13)冷却系统采用双喷头,油冷和压缩空气(14)润滑系统采用8号机油自动润滑(15)总功率4千瓦,单相220V用电(16)机床尺寸9001100*1450(17)机床总重量1000公斤(18)变频器为2.2KW台湾产高性能磁束矢量变频器(19)相关电器元件采用和泉正泰等品牌,保证了机器的整体性能和质量双头高速精密精雕机产品配置参数表详细配置情况(总价内已包括)(1)控制系统标配为Nestudio(2)日本松下交流数字何服电机(3)60000/P 1. 2KW或4000P 0.75KW(4)刀具最大夹持直径6毫米(5)台湾上银P级精密滚动直线导轨,研磨滚珠丝杆(5)日本NSK精密轴承P4级(7)合资品牌全自动对刀仪(8)行程325* 1065工作台650*400 (m)(9)工作台负重100公斤(10)主轴端面到工作台装卡高度150 (毫米)(11)最大移动速度12米/分钟,最大加工速度7米/分钟(12)定位精度0.01m/300(13)重复定位精度0.05m/300(14)冷却系统采用喷头(酒精或空气或水)(15)润滑系统采用8号机油自动润滑(16)总功率4千瓦三相220V用电(17)机床总重量2000公斤(18)主轴冷水机(19)全花岗岩床身结构(20)台湾进口品牌手脉(21)一周培训,内部培训教材,全套中文说明书。
德川四轴参数设定

德川四轴参数设定
德川四轴是一种飞行器,其参数设置包括以下几个方面:
1. 控制器参数设置:包括PID参数(比例、积分、微分),控制器频率等。
2. 电机参数设置:包括电机KV值,最大电流,最大功率等。
3. 螺旋桨参数设置:包括螺旋桨尺寸,螺旋桨材质,螺旋桨形状等。
4. 电池参数设置:包括电池容量,电池类型,电池电压等。
5. 传感器参数设置:包括陀螺仪,加速度计,罗盘等的采样频率和精度等。
6. 飞行模式参数设置:包括稳定模式,手动模式,自动模式等的设置。
以上参数设置需要根据具体的使用场景和要求进行调整,建议在操作前先阅读德川四轴的使用说明书并参考相关技术资料。
同时,在调试参数时应该注意安全,避免发生意外事故。
四轴
首先声明本人也是菜鸟,此教程就是从一个菜鸟的角度来讲解,现在论坛上的帖子都突然冒很多名词出来,又不成体系,我自己开始学的时候往往一头雾水,相信很多新手也一样。
所以在这个帖子里面,我都会把自己遇到的疑惑逐一讲解。
【概述】1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)2、四轴零件之间的接线与简单说明4个电调的正负极需要并联(红色连一起,黑色连1一起),并接到电池的正负极上;电调3根黑色的电机控制线,连接电机;电调有个BEC输出,用于输出5v的电压,给飞行控制板供电,和接收飞行控制板的控制信号;遥控接收器连接在飞行控制器上,输出遥控信号,并同时从飞行控制板上得到5v供电;【基本原理与名词解释】1、遥控器篇什么是通道?通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。
但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转所以最低得4通道遥控器。
如果想以后玩航拍这些就需要更多通道的遥控器了。
什么是日本手、美国手?遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。
反之同理。
判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
2、飞行控制板篇一般简称飞控就是这个东西了。
飞控的用途?如果没有飞控板,四轴飞行器就会因为安装、外界干扰、零件之间的不一致型等原因形成飞行力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成),如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
四轴机械手设计
设计四轴机械手需要考虑机械结构设计、电气控制系统和运动学问题。
以下是设计四轴机械手的一般步骤和主要考虑因素:1. 机械结构设计:-关节类型选择:确定每个关节的类型,如旋转关节或直线关节,以满足机械手的运动需求。
-运动范围设计:根据应用需求,设计各个关节的运动范围,包括旋转角度和工作空间范围。
-结构材料选择:选择合适的材料,如铝合金、碳纤维等,以满足机械手的刚性和重量要求。
2. 电气控制系统设计:-电机选择:选择合适的电机类型和规格,如步进电机或伺服电机,以提供足够的动力和精准的控制。
-控制器选择:选择合适的控制器,如PLC、单片机或工业控制计算机,用于控制电机和执行器的运动。
-传感器应用:考虑使用位置传感器、力传感器等传感器,以实现闭环控制和精准的位置控制。
3. 运动学分析:-逆运动学:针对机械手的运动学方程进行逆运动学分析,以确定每个关节的控制参数和动作规划。
-正运动学:进行正运动学分析,将末端执行器的位置和姿态转换为各个关节的运动参数。
4. 软件开发:-控制算法:开发机械手运动控制的算法,包括轨迹规划、运动插补和运动学逆解算法。
-用户界面:设计人机界面,实现对机械手的操作、监控和故障诊断。
5. 安全考虑:-安全设计:考虑机械手运动时的安全问题,设计安全限位、紧急停止和防护装置,确保人员和设备安全。
6. 性能测试:-动态特性测试:对机械手进行动态响应、负载能力和重复定位精度等性能测试。
-效率评估:评估机械手的工作效率、功耗和运动稳定性。
设计四轴机械手需要综合考虑机械、电气和控制等多个领域的知识,确保机械手具有良好的运动性能和控制精度。
在设计过程中,还需要与相关领域的专业人士合作,并充分考虑实际应用需求。
ug编四轴程序要求的主机配置

ug编四轴程序要求的主机配置
UG(Unigraphics)编制四轴程序的主机配置要求如下:
1. 操作系统:UG编程软件支持Windows、Linux等操作系统。
建议使用64位操作系统,以保证软件的稳定运行和较高的内存支持。
2. 处理器:至少双核心以上,推荐使用四核心或以上的处理器,以保证编程和加工过程中的计算能力。
3. 内存:至少8GB内存,推荐16GB或以上,以确保在处理大型零件和复杂编程时的运行速度。
4. 显卡:具备一定性能的显卡,有利于提高图形渲染速度,推荐使用NVIDIA或AMD系列的显卡。
5. 硬盘:至少500GB的机械硬盘或更大的固态硬盘,用于存储软件、零件文件和程序等数据。
6. 显示器:建议使用1920x1080分辨率以上的显示器,以获得更好的视觉效果。
7. 输入设备:键盘和鼠标,用于操作和编程。
8. 网络连接:稳定的网络环境,便于获取技术支持和更新软件。
以上是UG编制四轴程序的主机配置要求。
需要注意的是,配置越高,运行速度和性能越好,但同时成本也会相应提高。
在实际应用中,根据企业和个人需求进行适当配置即可。
另外,在选购硬件时,也要考虑未来升级和扩展的可能性,以满足数控技术不断发展的需求。
四轴参数

数控机床参数一、掌握数控机床参数的重要性:无论哪个公司的数控系统都有大量的参数,如日本的FANUC公司6T-B系统就有294项参数。
有的一项参数又有八位,粗略计算起来一套CNC系统配置的数控机床就有近千个参数要设定。
这些参数设置正确与否直接影响数控机床的使用和其性能的发挥。
特别是用户能充分掌握和熟悉这些参数,将会使一台数控机床的使用和性能发挥上升到一个新的水平。
实践证明充分的了解参数的含义会给数控机床的故障诊断和维修带来很大的方便,会大大减少故障诊断的时间,提高机床的利用率。
同时,一台数控机床的参数设置还是了解CNC系统软件设计指导思想的窗口,也是衡量机床品质的参考数据。
在条件允许的情况下,参数的修改还可以开发CNC系统某些在数控机床订购时没有表现出来的功能,对二次开发会有一定的帮助。
因此,无论是那一型号的CNC系统,了解和掌握参数的含义都是非常重要的。
另外,还有一点要说明的是,数控机床的制造厂在机床出厂时就会把相关的参数设置正确、完全,同时还给用户一份与机床设置完全符合的参数表。
然而,目前这一点却做的不尽如人意,参数表与参数设置不符的现象时有发生,给日后数控机床的故障诊断带来很大的麻烦。
对原始数据和原始设置没有把握,在鼓掌中就很难下决心来确定故障产生的原因,无论是对用户和维修者本人都带来不良的影响。
因此,在购置数控机床验收时,应把随机所带的参数与机床上的实际设置进行校对,在制造厂的服务人员没有离开之前落实此项工作,资料首先要齐全、正确,有不懂的尽管发问,搞清参数的含义,为将来故障诊断扫除障碍。
数控机床在出厂前,已将所采用的CNC系统设置了许多初始参数来配合、适应相配套的每台数控机床的具体情况,部分参数还需要调试来确定。
这些具体参数的参数表或参数纸带应该交付给用户。
在数控维修中,有时要利用机床某些参数调整机床,有些参数要根据机床的运行状态进行必要的修正,所以维修人员要熟悉机床参数。
以日本FANUC公司的10、11、12系统为例,在软件方面共设有26个大类的机床参数。
四轴学习

【概述】1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)2、四轴零件之间的接线与简单说明4个电调的正负极需要并联(红色连一起,黑色连1一起),并接到电池的正负极上;电调3根黑色的电机控制线,连接电机;电调有个BEC输出,用于输出5v的电压,给飞行控制板供电,和接收飞行控制板的控制信号;遥控接收器连接在飞行控制器上,输出遥控信号,并同时从飞行控制板上得到5v供电;【基本原理与名词解释】1、遥控器篇什么是通道?通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。
但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转所以最低得4通道遥控器。
如果想以后玩航拍这些就需要更多通道的遥控器了。
什么是日本手、美国手?遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。
反之同理。
判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
2、飞行控制板篇一般简称飞控就是这个东西了。
飞控的用途?如果没有飞控板,四轴飞行器就会因为安装、外界干扰、零件之间的不一致型等原因形成飞行力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成),如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
什么是x模式和+模式?购买飞控的时候老板都要问这个问题,刷买什么模式的,以上就是区别。
X模式要难飞一点,但动作更灵活。
55吨四轴自卸车技术参数

55吨四轴自卸车技术参数一、车辆整体参数1. 车辆型号:55吨四轴自卸车2. 总质量:55吨3. 外形尺寸:长×宽×高=xxxxmm×xxxxmm×xxxxmm4. 车厢容积:xxxx立方米5. 底盘配置:四轴底盘6. 驱动形式:6×4二、发动机参数1. 厂家:某某某发动机公司2. 型号:xxxx3. 排量:xxxxL4. 最大功率:xxxxkW5. 最大扭矩:xxxxN·m6. 燃油类型:柴油7. 排放标准:国Ⅴ三、变速器参数1. 厂家:某某某变速器公司2. 型号:xxxx3. 挡位数:x4. 驱动方式:机械式四、车轮参数1. 轮胎型号:xxxx2. 轮胎规格:xxxx-xx3. 轮胎数量:8个4. 轮胎气压:xxxxkPa五、悬挂系统参数1. 前悬挂形式:叶片弹簧悬挂2. 后悬挂形式:空气悬挂六、燃油消耗参数1. 城市工况:xxL/100km2. 高速工况:xxL/100km3. 综合工况:xxL/100km七、制动系统参数1. 制动方式:气压制动2. 制动类型:双回路液压制动3. 驻车制动:齿轮驻车制动八、其他参数1. 最大爬坡度:xx%2. 最小离地间隙:xxmm3. 排放噪声:xxdB(A)4. 车辆颜色:可根据需求定制55吨四轴自卸车是一款具有强大承载能力和优秀性能的交通工具。
其整体参数、发动机参数、变速器参数、车轮参数、悬挂系统参数、燃油消耗参数、制动系统参数以及其他参数都经过精心设计和优化,以满足不同工况下的运输需求。
无论是在城市道路还是在高速公路,55吨四轴自卸车都能稳定、高效地完成工作任务。
它的出现将为工程建设、矿山开采、物流运输等行业带来更大的便利和效益。
详细的F450四轴装机实例

机架轴距是450m的4个机臂(2个黑色、2个红色)、1个带PCB上中心板,螺丝24个M2.5*6、16个M3*82、机架附加脚架脚架高度是14cm的4个(对新手来说,脚架是个易损品,建议买多3、无刷电机我们选择的无刷电机是朗宇V系列V2216 KV900。
用这个型号的电机不表示是最优的选择,你可以根据《电机朗宇V系列V2216 KV900 4个零配件主轴4个、主轴螺丝12个,垫片4个,子弹头4个,螺母4个4、螺旋桨螺旋桨1055 正反桨2对,共4只(建议买多2对4只)桨垫5mm 4个总价格20元OPTO-PRO电调,铂金30A电调持续电流是30A,并为多轴飞行器优化过油门响应。
电调好盈铂金系列Platinum-30A-OPTO-PRO电调,共4只6、飞控供电模块飞控供电模块APM 2.8 使用的带电压电流计的供电模块,电源输入输出用T型插口总价格50元实称总重量23g7、电池8、飞控飞控APM 2.8 弯针,带外壳两块玻纤支架,4个减震球,2个海绵双面胶用于固定APM在支架上。
减震球安装时候较容易损9、GPS(可选)GPS兼容APM 2.8的带支架的NEO-7M,内置电子罗盘支架带折叠功能,减少携带时候GPS的高度。
GPS支架小零件较多,要确认零件是否齐全。
支10、遥控器遥控器乐迪AT9 美国手附件回传模块、遥控器电池、8条杜邦线11、充电器零配件1、香蕉公头香蕉公头12个香蕉母头12个直径约5mm热缩管1-2米元。
螺丝胶中强度厌氧性的螺丝锁固定胶总价格10ml的约8元电烙铁40W以上带防静电,约30元(3)电子称(可选)(4)桨平衡器(可选)(5)其它2)在电源线头部用美工刀环切5mm长度的外皮,剥开外皮露出裸线,用手把露出的裸线拧紧。
3)在裸线上绕一小段焊锡丝,用电烙铁加热焊锡丝,让整个裸线头被焊锡包住。
用焊锡处理过的裸线头能避免受力时候而让电线内铜丝散开。
(2)处理电源输出线2)这时候看下母头浅的那头(焊接电源线的那端,一般这端会有个小孔),估计有2mm的深度。
四轴机械手参数介绍
• 环境温度 : 0-55 ℃ • 湿度 : 30% 到最大 95%,不结露 • 本体喷漆:电脑白(可指定其
• 控制系统参数: • 基于触摸屏+PLC的冲床机器人控制系统 • PTP点到点控制模式 • 软件版本:A3.0 • 全中文8寸触摸屏操作系统 • 内置冲床行业编程软件工艺包 • 支持拖动示教功能 • 支持多种产品程序存储 • 具备与任何冲床连线,互锁功能 • 相邻两台机器人具备通讯功能 • 支持从左至右或从右至左上下料切换 • 内部集成用户控制信号,支持外围抓手的控制 • 配备数显真空检测装置 • 所有外部连线采用快速插头连接 • 最大功率: 2.6 KW • 电控箱:标配一体式电箱、亦可加价选择分体式电箱。 • 配支架式可移动示教盒 • 示教盒电缆长度3 m • 防护等级 : IP20 • 湿度: 最大95%,不结露 • 环境温度 0 - 45 °C • 电源:单相变压器,单相加地线, 220V电压
a30?全中文8寸触摸屏操作系统?内置冲床行业编程软件工艺包?支持拖动示教功能?支持多种产品程序存储?具备与任何冲床连线互锁功能?相邻两台机器人具备通讯功能?支持从左至右或从右至左上下料切换?内部集成用户控制信号支持外围抓手的控制?配备数显真空检测装置?所有外部连线采用快速插头连接?最大功率
4摆臂式4轴机械手参数介绍
鑫台铭制
产品用途
• 1.此5轴机械手主要用于冲压行业冲床、冲压件自动上下料。 • 2.此5轴机械手可用于油压机自动上下料。 • 3. 此5轴机械手可用于车床自动上下料。 • 4.此5轴机械手可用于铣床自动上下料。 • 5.此5轴机械手还可以用于一些代替人的搬运。
产品示意图
• XTM4摆臂式4轴机械手机械参数:
• J1轴(上下运动Z轴)采用滚珠丝杆+线性导轨+高速高分辨率伺服马达 • J2轴(摆臂旋转A轴)采用谐波减速机+高速高分辨率伺服马达 • J3轴(前后伸缩X轴)采用滚珠丝杆+线性导轨+高速高分辨率伺服马达 • J4轴(末端旋转B轴)采用行星减速机+高速高分辨率伺服马达 • 上下运动Z轴行程: 450MM • 摆臂旋转A轴旋转角度:300° • 前后伸缩X轴行程:600MM • 末端旋转B轴旋转角度:360° • 摆臂活动半径:1400MM • 前后伸缩X轴最高速度:0.8M/S • 上下运动Z轴最高速度:1.0M/S • 摆臂旋转A轴最高速度:225°/S • 末端旋转B轴最高旋转速度:900°/S • 标准最大负载:6KG ( 可订做最大负载:16KG ) • 输出法兰到地面高:950MM(可根据现场要求定) • 重复定位精度: ±0.08MM • 安装方式:落地式
台湾机床四轴参数设置

台湾机床四轴参数设置
台湾机床四轴参数设置通常需要根据具体的机床型号和应用需求来确定。
以下是一般情况下的四轴参数设置建议:
1. 加速度和减速度:这两个参数决定了机床在运动过程中的加速和减速能力。
根据工件的要求和机床的性能,通常需要根据加工任务的复杂度来设定适当的数值。
2. 最大速度:最大速度指的是机床在运动过程中能够达到的最高速度。
根据材料和加工内容的不同,可以调整最大速度以满足加工要求。
3. 轴向精度:轴向精度是指机床在运动过程中的位置控制精度。
根据加工任务的要求,可以设置适当的轴向精度,以确保加工质量和精度。
4. 位置偏差补偿:位置偏差补偿是通过校正机床误差来提高加工精度的一种方法。
根据机床类型和精度要求,可以进行相应的位置偏差补偿设置。
5. 回零点设置:回零点是机床进行初始位置校准的起始点。
根据具体机床的设计和使用要求,可以设置适当的回零点。
请注意,以上参数设置可能会因机床型号、品牌和具体应用而有所不同。
建议参考相关机床的用户手册或咨询厂家获取详细的参数设置指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
充电器:简易平衡冲(几十块一个)充电速度不可调,慢。b6:性价比高,山寨货很多,价格便宜100左右。a6:几百块的东西,速度快。更贵的充电速度更快。
遥控器:牌子有天地飞,华科尔,富斯,这三个是国产的比较有知名度的,价格富斯最便宜,性能应该都差不多,价格根据牌子和通道数,几百块。性能都差不多。国外的牌子:扶她爸,jr等日本美国货。价格2千起,做工很好,稳定性也好。7通道是相对比较合适的(6通道的便宜,但7通道的算性价比是高一点,7通道以上的很少用到了)。
电池:3s,1800到2200mah 牌子有格式和花牌和其他各种牌子,性能一分钱一分货。性能影响为电池的放电能力,充电速度,寿命,这些都会影响实际的续航时间。
450四轴:
机架轴距:450mm 价格:50到100+,例如f450 50块。
电机,型号2212 参数:1000kv或者小一点。牌子和价格与330差不多。推荐用2212,980kv
450以上轴距的四轴或者多轴,由于机架大,桨就大,电机就大,电调就大,电池就大,连锁反应后价格高出很多,450便宜是应该用的人最多,利润就低。有能力玩大飞机的。推荐10寸型号例如1045,1047.价格8元一对左右。推荐apc的,安静很多,那效率自然就高了,原装的一对40,买仿的就行。
电调,15到30a,牌子和330一样,a的数值决定了飞行时电调的发热程度。
电池:3s,1800到2600mah,性能价格参照330.
还有就是装四轴的螺丝刀,买把好点的,10块钱,要不拧螺丝会崩溃。最好有电量报警器,飞到没电摔下来可得不偿失,对电池寿命也很伤。还有一些尼龙扎带,m3双面胶,烙铁锡线这个要有,烙铁功率要够,要不焊接接头是很痛苦的。还有杜邦线排针什么的。
330四轴:
机架轴距:330mm 价格:50到100 例如f330 60元。
电机:型号:2208 参数:1200kv左右 牌子有郎宇,新西达等,价格按品质50到90元,推荐郎宇2208,1260kv
桨:8寸,例如0838 一对8块钱左右
电调:15到20a 牌子有好赢,新西达,中威特等,好赢的品质比较好,价格也高点一般用四轴固定翼专用的就行,价格根据电流和牌子,在40到80不等。还是贵一点点的好赢好些