第五组xy工作台控制电路设计
数控XY工作台与控制系统设计

UNIVERSITY本科毕业论文(设计)题目:数控机床XY工作台与控制系统设计学院:姓名:学号:专业:机械设计制造及其自动化年级:指导教师:职称:二○一一年五月摘要数控机床是一种高精度、高效率的自动化机床。
能够适应市场对产品多样化、高精度和快速响应的加工要求,因此得到了广泛的应用。
数控机床正朝着高性能、高智能化、系统化以及轻量、微型化方向发展。
作为一个较完善的机电一体化系统,数控车床应包含以下几个基本要素:机械本体、动力与驱动部分、执行机构、传感测试部分、控制系统及信息处理部分。
XY数控工作台采用开环控制系统,结构简单、实行方便并且能够保证一定的精度,设计主要对工作台的机械部分进行设计,包括滚珠丝杆、滚动导轨、轴承等传动元件及步进电动机的计算及选用,最后对控制系统进行了分析和完成各电子元件的选用,并且利用CAD进行了装配图的绘制,各机械元件的设计及各零件的安装也做了比较详细的说明。
关键词:数控车床机械部分传动元件控制系统AbstractXY table of the CNC machine tool and control system design.The CNC lathe is a high precision.high-efficiency automatic machine. Can able to adapt to the market what product diversification. the processing requirements of high accuracy and fast response. has been widely used. CNC lathe is moving high-performance. high intelligence. Organization. and lightweight. miniaturized direction. As a more complete mechatronic systems , CNC lathes should contain the following basic elements: mechanical body . part of the motivation and drive. executing agency . the sensor test section .the control system and information processing section .XY CNC table using open-loop control system.Has simple structure. convenient to implement. And be able to guarantee a certain accuracy. This design is mainly designed for the mechanical part of the workbench. Including ball screw. rolling guide bearings . stepper motor and other transmission elements calculation and selection. Finally, the analysis to control system and complete selection of electronic components. In the same time. Use software CAD drawing of the assembly drawing. The design of mechanical components and parts installed a more detailed explanationKey words:CNC lathes. mechanical part. driving element. control system摘要 (II)1. 绪论 (1)1.1. 课题来源及意义 (1)1.2. 发展现状与发展趋势 (2)1.3. 论文结构及主要研究内容 (4)2. 数控系统方案确定 (5)2.1. 总体方案步骤确定: (5)2.2. 设计系统方案的确定 (6)2.3. XY工作台各项参数的初步确定 (7)2.4. 控制系统的选择 (7)3. 机械部分设计 (9)3.1. 设计主要思路 (9)3.2. 工作台外形尺寸及重量估算 (9)3.3. 滚动导轨参数计算与选型 (11)3.3.1. 导轨的选用和计算 (11)3.3.2. 额定行程长度和工作时间寿命 (12)3.4. 滚珠丝杠计算、选择 (13)3.4.1. 确定当量载荷 (13)3.4.2. 丝杠载荷计算和选用 (13)3.4.3. 传动效率计算 (16)3.4.4. 丝杠刚度验算 (16)3.5. 支承座的参数 (17)3.6. 齿轮计算、设计 (17)3.6.1. 齿轮参数确定 (17)3.6.2. 齿轮传动消隙 (18)3.7. 步进电机的选用 (18)3.7.1. 步进电机启动力矩的计算 (19)3.7.2. 步进电机惯性负载的计算 (20)4. 机床数控系统设计 (21)4.1. 硬件电路设计 (21)4.1.1. 确定硬件电路的总体方案 (21)4.1.2. 主控制器和存储器扩展 (22)4.1.3. 步进电机驱动电路设计 (23)4.1.4. 硬件电路设计思路 (24)4.2. 系统控制软件设计 (25)4.2.1. 系统控制功能分析 (25)4.2.2. 步进电机控制程序 (25)4.2.3. 系统加工程序 (28)5. 结束语与致谢 (30)6. 参考文献 (31)1.绪论我国现今工业发展的迅速程度和环境,发展我国机电数控技术及装备、提高我国制造业信息化水平和国际竞争能力已非常重要。
(完整版)XY数控工作台设计说明书.docx
一、总体方案设计1.1设计任务题目: X— Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X—Y 数控工作台,主要参数如下:1)工作台面尺寸C×B× H=【 200+(班级序号)× 5】 mm×【 200+(班级序号)× 5】mm×【 15+(班级序号)】mm;2)底座外形尺寸C1×B1× H1=【 680+(班级序号)× 5】mm×【 680+(班级序号)×5】mm×【 230+(班级序号)× 5】 mm;3)工作台加工范围X=【 300+(班级序号)× 5】mm,Y=【300+(班级序号)× 5】mm;4) X 、Y 方向的脉冲当量均为0.005mm/脉冲; X、 Y 方向的定位精度均为± 0.01mm;5)夹具与工件质量M=【15+(班级序号)】kg;6)工作台空载最快移动速度为3m/min;工作台进给最快移动速度为0.5m/min 。
7)立铣刀的最大直径d=20mm;8)立铣刀齿数Z=3;9)最大铣削宽度a e20mm ;10)最大被吃刀量a p10mm 。
1.2总体方案确定(1)机械传动部件的选择① 导轨副的选择② 丝杠螺母副的选择③ 减速装置的选择④ 伺服电动机的选择(2)控制系统的设计① 伺服电机启动、停止、调速、正反转的控制② PLC 控制电机的梯形图编程XY数控工作台结构Y 方向传动机构微机工作台电型步进电接动机减速器机驱滚珠丝杠口动电人机接口路减步进电速滚器珠动机X 方向传动机构丝杠系统总体方案结构框图1.3设计的基本要求(1)按照机械系统设计的步骤进行相关计算,完成手写设计说明书。
(2)计算结果作为装配图的尺寸和零部件选型的依据,通过 AutoCAD软件绘制 XY数控工作台的总装配图,并绘制 AO图纸。
XY运动工作台控制系统设计
XY运动工作台控制系统设计一、引言二、系统结构三、硬件设计(1)电脑控制器:选择一台性能稳定、接口丰富的电脑作为控制器。
通过串口、USB接口或者以太网接口与运动控制板通信。
(2)运动控制板:运动控制板可以采用现成的通用运动控制板,也可以根据具体需求进行设计制作。
运动控制板负责接收电脑控制器发送的指令,并将指令转化为电机驱动所需的信号。
运动控制板可以集成位置检测传感器,用于反馈运动状态。
(3)电机驱动器:电机驱动器采用步进电机驱动器,用于控制步进电机的转动。
具体选型时要考虑电机的额定电流和工作电压,并根据步进电机的驱动方式选择对应的驱动器。
(4)步进电机:步进电机是XY运动工作台实现运动的核心部件。
步进电机具有精度高、稳定性好的特点,能够按指定的步进角度进行旋转。
具体选型时需根据需要的精度、负载和速度等要素进行选择。
四、软件设计(1)用户界面:设计一个直观、易用的用户界面,用于输入运动指令和参数设置。
用户界面可以通过编程语言或者现成的控件库来实现。
(2)运动控制算法:根据所需运动方式和精度要求,设计相应的运动控制算法。
常见的算法包括最小二乘法拟合、PID控制等。
算法设计应考虑到运动平滑、精度高、稳定性好的要求。
(3)通信协议:电脑控制器与运动控制板之间的通信协议需要定义清楚,包括指令格式、通信速率等。
常见的通信协议有UART、USB、以太网等。
五、系统性能(1)精度:XY运动工作台的精度主要由步进电机的步进角度和电机驱动器的精度决定。
根据具体需求选择合适的步进角度和驱动器。
(2)速度:XY运动工作台的速度受到步进电机的转动速度和驱动器的最大转速限制。
选择合适的步进电机和驱动器以实现所需的速度要求。
(3)稳定性:XY运动工作台的稳定性主要由电机驱动器的功率输出和控制算法的调整精度等因素决定。
在实际设计中需要对系统进行充分测试和调试,以保证稳定性。
六、总结本文介绍了XY运动工作台控制系统的设计,包括硬件设计和软件设计。
X-Y数控工作台机电系统设计

一种经济型数控机床的控制系统,包括机床伺服系统和对该伺服系统进行控制的PLC;其特征在于,还包括通过通信接口与PLC通信的触摸屏,所述触摸屏包括:数据输入模块,用于输入、修改被控参数的参数值和操作指令,读取触摸屏的操作界面;数据存储模块,用于存储输入、输出数据;数据处理计算模块,用于对输入、输出参数数据进行处理、计算;包括输入信号的编码运算;输出信号的解码运算;数据存储单元,用于存储移位单元传递来的数据;数据检测单元,用于实时检测坐标轴的当前运动状态参数值,包括距离、速度值,以及控制方式参数值;数据比较单元,用于将检测单元检测到的坐标轴当前运动状态参数值、控制方式参数值与触摸屏存储模块的设定值进行比较;X-Y数控工作台机电系统设计采用步进电机作为驱动装置。
步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。
其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。
由于旋转磁场对放入其中的通电导体既转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。
模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作平台、滚珠丝杠螺母副以及伺服电动机等部件构成。
其外观形式如图1所示。
其中,伺服电动机作为执行元件用来驱动滚珠丝杠,滚珠丝杠的螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。
导轨副、滚珠丝杠螺母副和伺服电动机等均已标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。
控制系统根据需要,可以选用标准的工业控制计算机,也可以设计专用的微机控制系统。
题目:X-Y数控工作台机电系统设计任务:设计一种供立式数控铣床使用的X-Y数控工作台,主要参数如下:(1)立铣刀最大直径d =15 mm;(2)立铣刀齿数Z=3;(3)最大铣削宽度a e=15 mm;(4)最大铣削深度a p=8 mm;(5)加工材料为碳素钢(6)X、Y方向的脉冲当量δx =δy=0.005mm/脉冲;(7)X、Y方向的定位精度均为±0.01 mm;(8)工作台面尺寸为230 mm×230 mm,加工范围为300 mm×200 mm;(9)工作台空载最快移动速度v xmax =v ymax =3000 mm/min;(10)工作台进给最快移动速度v xmaxf =v ymaxf =1200 mm/min。
基于单片机的数控车床XY工作台与控制系统设计说明书
基于单片机的数控车床XY工作台与控制系统设计摘要了解数控机床的概念,所谓数字控制是按照含有机床(刀具)运动信息程序所指定的顺序自动执行操作的过程.而计算机数控机床就是数控机床在计算机监控下进行工作.它的优点很多,可以在同一机床上一次装夹可完成多个操作,生产率显著提高等优点,但它的价格昂贵。
由于我国现在使用的机床大多数为普通车床,自动化程度低,要更新现有机床需要很多资金。
为了解决这个问题,也为了适应多品种中、小批量零件加工我们选择机床经济型数控改造.纵向进给机构的改造:拆去原机床的溜板箱、光杠与丝杠以及安装座,配上滚珠丝杠及相应的安装装置,纵向驱动的步进电机及减速箱安装在车床的床尾,不占据丝杠空间。
横向进给机构的改造:拆除横向丝杠换上滚珠丝杠,由步进电机带动。
关键词:运动信息,滚珠丝杠,步进电机Single Chip Microcomputer—based XY table CNC latheand Control System DesignABSTRACTNumerical Control (NC) is any machining process in which the operations are executed automatically in sequences as specified by the program that contains the information for the tool movement .When Numerical Control is performed under computer supervision,it is called Computer Numerical Control (CNC).CNC machines have many advantages over conventional machines. For example,there is a possibility lf performing operations on the same machine in one setup and production is significantly increased。
XY工作台部件及单片机控制设计
XY工作台部件及单片机控制设计目录1.序言 (2)2.总体方案设计 (2)2.1.设计任务 (2)2.2.总体方案确定 (2)3.机械系统设计 (3)3.1.工作台外形尺寸及重量估算 (3)3.2.滚动导轨的参数确定 (4)3.3.滚珠丝杠的设计计算 (5)3.4.步进电机的选用 (7)3.5.确定齿轮传动比 (12)3.6.确定齿轮模数及有关尺寸 (12)3.7.步进电机惯性负载的计算 (12)4.控制系统硬件设计 (13)4.1.CPU板 (13)4.2.驱动系统 (15)4.3.控制系统软件的组成和结构 (17)5.参考文献 (21)1.序言据资料介绍,我国拥有400多万台机床,绝大部分都是多年累积生产的普通机床。
这些机床自动化程度不高,加工精度低,要想在短时期内用自动化程度高的设备大量更新,替代现有的机床,无论从资金还是从我国机床制造厂的生产能力都是不可行的。
但尽快将我国现有的部分普通机床实现自动化和精密化改造又势在必行。
为此,如何改造就成了我国现有设备技术改造迫切要求解决的重要课题。
在过去的几十年里,金属切削机床的基本动作原理变化不大,但社会生产力特别是微电子技术、计算机技术的应用发展很快。
反映到机床控制系统上,它既能提高机床的自动化程度,又能提高加工的精度,现已有一些企业在这方面做了有益的尝试。
实践证明,改造后的机床既满足了技术进步和较高生产率的要求,又由于产品精度提高,型面加工范围增多也使改造后的设备适应能力加大了许多。
这更加突出了在旧机床上进行数控技术改造的必要性和迫切性。
由于新型机床价格昂贵,一次性投资巨大,如果把旧机床设备全部以新型机床替换,国家要花费大量的资金,而替换下的机床又会闲置起来造成浪费,若采用改造技术加以现代化,则可以节省50%以上的资金。
从我国的具体情况来讲,一套经济型数控装置的价格仅为全功能数控装置的1/3到1/5,一般用户都承担得起。
这为资金紧张的中小型企业的技术发展开创了新路,也对实力雄厚的大型企业产生了极大的经济吸引力,起到了事半功倍的积极作用。
基于单片机的数控车床XY工作台与控制系统设计报告
基于单片机的数控车床XY工作台与控制系统设计报告设计报告:基于单片机的数控车床XY工作台与控制系统设计1.引言数控(数值控制)车床是一种以机电一体化技术为基础,通过计算机控制工件加工的设备。
传统的车床需要操作工人手动控制加工过程,而数控车床则通过计算机编程实现自动化加工。
本设计报告旨在设计基于单片机的数控车床XY工作台与控制系统,实现工件在XY平面上的精准加工。
2.系统设计(1)硬件设计本系统的硬件设计包括数控车床的机械结构和控制系统的电路设计。
数控车床的机械结构需要设计XY工作台的运动结构。
可以采用步进电机或直流伺服电机作为驱动器,通过丝杆传动实现运动。
同时,需要设计定位传感器用于测量工件位置,反馈给控制系统。
控制系统的电路设计主要包括单片机的选择和配套电路。
可以选择性能稳定、功能强大的单片机作为控制器,并设计外部电路实现与驱动器和传感器的连接。
此外,还需要设计电源电路、通信接口等。
(2)软件设计软件设计是数控车床控制系统非常重要的一部分,需要实现驱动器控制和运动轨迹规划等功能。
可以使用C语言开发嵌入式软件程序。
驱动器控制:通过控制输出脉冲和方向信号,控制步进电机或直流伺服电机的运动。
可以根据用户输入的指令,控制工件在XY平面上移动。
运动轨迹规划:根据用户输入的参数,计算出工件在XY平面上移动的运动轨迹。
可以采用插补算法,实现平滑移动和加工轨迹自由控制。
3.系统实现(1)实现步骤首先,进行硬件设计。
根据车床的尺寸和加工需求设计XY工作台的运动结构,选择合适的驱动器和传感器。
然后,根据单片机选型,设计电路连接驱动器和传感器。
最后,设计电源电路和通信接口。
其次,进行软件设计。
根据硬件设计的结果,编写嵌入式软件程序,实现驱动器控制和运动轨迹规划等功能。
最后,进行系统调试。
根据设计的功能要求,对系统进行全面测试和调试,验证系统的稳定性和性能。
(2)实验结果通过实验验证,本设计的数控车床XY工作台与控制系统实现了工件在XY平面上的精确加工。
XY工作台结构及控制设计

XY自动工作台结构及控制设计作者:XXX(陕西理工大学机械工程学院机械设计制造及自动化专业XXXX班,陕西汉中 723000)指导老师:XXX[摘要]本文针对常规钻床十字工作台或铣床十字工作台的使用需要,设计开发了一套XY自动工作台。
通过驱动两台伺服电机实现横纵坐标给定位移(坐标)的控制,确保该自动工作台的物理性能满足加工精度的要求。
通过对课题任务的分析,确定了该工作台的大致参数,并提出了几种传动方案,根据工作台的使用环境以及加工精度的要求,对几种方案进行了论证,确定了最终总体设计方案。
根据总体方案的思路对机械部分进行了设计,包括确定系统的脉冲当量、工作台外形尺寸及质量估算、滚动直线导轨副的计算、滚珠丝杠螺母副的选择与计算、齿轮的设计计算、步进电机的选择,并用proe绘制了工作台的三维模型及部分零件的CAD二维图纸。
根据控制需要以及控制特点确定了步进电机的开环控制方式,利用51单片机控制步进电机从而实现对横纵坐标的控制,该设计部分主要包括设计原理及方案选择、步进电机控制硬件电路设计、软件开发,且给出了程序流程图及程序代码,并用Proteus进行了电机正反转、加减速以及给定圈数控制的仿真调试,最后进行了测试数据分析。
本文最终实现了XY自动工作台的结构及控制设计,能够实现工作台行程范围内(X向0-298mm,Y向0-223mm)的正反向移动,加减速(62r/min-435r/min)以及给定位移的控制,并对控制效果实现了软件仿真。
[关键词] XY自动工作台;数控机床;机械部分;传动元件;控制系统Design of XY Automatic Workbench Structure andControl SystemAuthor:Dongjiang,Zhang(Grade 2013,class 3,Maior Mechanical Design Manufacturing and Automation, Mechanical Engineering Dept.Shaanxi University of Technology Hanzhong 723000 Shaanxi)Tutor:Changqian,WangAbstract:This paper mainly talking about the design of a set of XY autmatic workbench for the use of the routme drilling machine cross platform or milling machine cross platform. By driving two servomotors to realize the control of horizontal and vertical coordinates for positioning movement (coordinates) , the physical performance of the automatic workbench can be satisfied with the requirements of machining accuracy.Through the analysis of the task ,parameters of the workbench was determined and several transmission scheme was put forward.According to the workbench of the use of the environment and the requirement of peocessing precision, several kinds of schemes were discussed and determined the final design scheme.The mechanical part was designed by the idea of the overall program, including the determination system of pulse, the size of the workbench and weight estimation ,liner rolling quide calculation, ball screw pair selection and calculation of gear design and calculation, selection of the stepper motor ,add draws the 3D model of the workbench and CAD drawings of some parts.According to the requirements and characteristics to determine the stepper motor open-loop control mode. By using the 51 single-chip computer to control stepper motor accomplish the control of the vertical and horizontal coordinates, this design part mainly includes the design principles and scheme selection, the design of the stepper motor control hardware circuit, software development, and the program flow chart and program code, and carring out by the Proteus for motor reversal, and the deceleration and simulation control given circle debugging, the final test data analysis.This paper finally realized the design of structure and control of the XY automatic woekbench, which can realize range (X :0-298mm, Y:0-223mm)of the forward and backward movement, acceleration and deceleration (62r / min-435r / min ) and the control of displacement, and the control effect to the realization of simulation software.Keywords:XY automatic table ;CNC machine tool; mechanical parts transmission; element control system目录1 前言 (1)1.1设计的目的及意义 (1)1.2发展现状及发展趋势 (1)2 总体设计方案确定 (2)2.1系统的运动方式与伺服系统 (2)2.2控制系统 (2)2.3XY自动工作台的结构及传动方式 (2)3 机械部分设计 (3)3.1确定系统的脉冲当量 (3)3.2工作台的外形尺寸及重量估算 (3)3.3滚动直线导轨副的选择与计算 (3)3.3.1导轨的当量载荷 (4)3.3.2当量载荷计算 (4)3.3.3计算额定动、静载荷 (4)3.4滚珠丝杠螺母副的选择与计算 (6)3.4.1计算载荷FC (6)3.4.2根据寿命条件计算必需的额定动载荷 (6)3.4.3根据必需的额定动载荷Ca选择螺旋尺寸 (6)3.4.4刚度验算 (7)3.5齿轮的设计、计算 (7)3.5.1齿轮的参数确定 (7)3.5.2齿轮间的传动消隙 (8)3.6步进电机的选择 (8)3.6.1步进电机启动力矩的计算 (8)3.6.2计算系统在电机轴上的等效转动惯量 (9)4 控制部分设计 (11)4.1设计原理及方案 (11)4.1.1设计原理 (11)4.1.2设计方案 (11)4.2步进电机控制及驱动系统电路设计实现 (14)4.2.1硬件设计 (14)4.2.2软件设计 (16)4.3软件仿真调试 (16)4.4测试数据分析 (17)5 总结与展望 (19)5.1总结 (19)5.2展望 (19)致谢 (20)参考文献 (21)附录1 前言当今世界,一个国家机械工业的发展对于国家综合国力的提升有着不可缺少的地位,机械工业是国民经济的基础性产业,也是国民经济的装备产业,机械工业承担着为国民经济各部门、各行业提供技术装备和生产工具的任务。
数控铣床XY工作台与控制系统设计
数控铣床XY工作台与控制系统设计毕业设计(论文)报告纸数控铣床XY工作台与控制系统设计摘要随着现代信息技术的发展,以提高产品加工的生产效率为主的高度自动化和提高产品质量为主的精密化成为现代机械加工技术发展的两个主要方向。
人们对数控机床、精密仪器和仪表以及各种精密机械设备提出了越来的精度要求,X-Y工作台是这些设备实现高精密加工的重要部件,对于提高产品的加工起着尤为重要的作用。
本论文针对铣床工作台机构及其控制系统进行设计,主要包括伺服电动机的选型,滚珠丝杠的选型、强度校核及生产设计中应注意的问题,连接伺服电机和滚珠丝杠副的联轴器的选型,导轨的设计。
根据系统的功能要求,选择数控系统的CPU,同时还需要扩展程序存储器、数据存储器以及步进电机驱动电源的选择。
通过对工作台机械传动链的系统设计以期满足机床进给系统的定位精度和静动态性能,从而确保机床的加工精度。
关键字:X-Y工作台,伺服系统,滚珠丝杠,步进电机毕业设计(论文)报告纸The design of CNC milling machine system XYworkbench and control systemAbstractWith the development of modern information techniques, the high automation with the main purpose of improving the production efficiency of product process and the accuracy with the accuracy with the main aim of improving the quality of product have been becoming the two major directions of the modern technique of mechanical process. People on the CNC machine tools, precision instruments and meters and all kinds of sophisticated machinery and equipment raised higher and higher precision, X-Y workbench is that important components of these high-precision machining equipment to achieve the core components, for improving the quality of processed products play the particularly important role.The entire mechanical transmission chain for the system design,servo motor related to the selection, the selection of ball screws, checking strength and production design should pay attention to the problem of connecting the servo motor and the ball screw of the axis. The Telection and Verification, bearing pieces bearing the design, rail and rack design. According to the function requirement of system, the selection of the CNC system CPU. It would also need to expand the program memory、data memory and the choice of stepper motor drive power.Through the table mechanical transmission chain system design to meet the machine into the system to the positioning accuracy and static and dynamic performance, so as to ensure the accuracy of processing machine.key words:The X-Y workbench ; Servo system; Ball screw;stepper motor毕业设计(论文)报告纸目录摘要 (i)Abstract (ii)第一章引言............................................................ - 1 -1.1 国内外数控系统的发展概况.......................................... - 1 -1.2 数控技术的发展趋势................................................. - 1 -1.2.1 高速、高精加工技术及装备的新趋势............................. - 1 -1.2.2 多轴联动加工和复合加工机床快速发展........................... - 2 -1.2.3 智能化、开放式、网络化成为当代数控系统发展的主要趋势......... - 2 -1.3 数控铣床X-Y工作台概述............................................. - 2 -1.3.1 国内外的研究现状分析......................................... - 3 -1.3.2 工作台的应用................................................. - 3 -1.3.3 发展趋势..................................................... - 3 -1.4 数控铣床系统XY工作台设计的目的.................................... - 4 - 第二章总体方案的确定..................................................... - 5 -2.1 数控铣床XY工作台设计的意义........................................ - 5 -2.2 工作台设计任务..................................................... - 5 -2.3 机械传动部件的选择................................................. - 5 -2.4 控制系统的设计..................................................... - 6 - 第三章机械传动部件的计算与选型........................................... - 7 -3.1 确定系统脉冲当量................................................... - 7 -3.2 工作台外形尺寸及重量初步估算....................................... - 7 -3.3 铣削力的计算....................................................... - 8 -3.4 直线滚动导轨副的计算与选型(纵向)................................. - 8 -3.5 滚珠丝杠螺母副的计算与选型........................................ - 10 -3.6 减速齿轮计算设计.................................................. - 12 -毕业设计(论文)报告纸3.7 角接触球轴承的选用、校核.......................................... - 14 - 第四章步进电动机的计算与选型............................................ - 16 -4.1 步进电机简介及原理................................................ - 16 -4.2 步进电机的计算与选型.............................................. - 17 -4.3 步进电动机驱动电源的选用.......................................... - 22 - 第五章工作台控制系统的设计............................................. - 23 -5.1 控制系统硬件电路设计.............................................. - 23 -5.1.1 单片机的简介与选用.......................................... - 23 -5.1.2 光耦合器................................................... - 23 -5.1.3 常用存储器及其扩展电路设计.................................. - 24 -5.1.4 常用I/O接口芯片及其扩展电路设计............................ - 26 -5.1.5 步进电动机的控制与驱动...................................... - 27 -5.2 控制系统的部分软件设计........................................... - 27 -5.2.1 存储器与I/O芯片地址分配.................................... - 27 -5.2.2 步进电动机运行程序设计...................................... - 27 - 第六章总结与展望...................................................... - 29 - 参考文献................................................................. - 30 - 致谢..................................................................... - 31 -毕业设计(论文)报告纸第一章引言1.1 国内外数控系统的发展概况随着计算机技术的高速发展,传统的制造业开始了根本性变革,各工业发达国家投入巨资,对现代制造技术进行研究开发,提出了全新的制造模式。
数控车床XY轴工作台和控制系统设计

目录摘要............................................................................................................................. 错误!未定义书签。
前言............................................................................................................................. 错误!未定义书签。
一、毕业设计的目的、意义 (4)二、毕业设计的内容............................................................................................................. 错误!未定义书签。
(一)毕业设计题目:单片机控制步进电机驱动的多用XY工作台。
.................. 错误!未定义书签。
三、数控系统总体方案的确定 ............................................................................................. 错误!未定义书签。
(一)系统运动方式的确定 ......................................................................................... 错误!未定义书签。
(二)伺服系统的选择 ................................................................................................. 错误!未定义书签。
数控车床系统XY工作台与控制系统设计

数控车床XY轴工作台和控制系统设计目录摘要 (1)前言 (2)一、毕业设计的目的、意义 (4)二、毕业设计的内容 (4)(一)毕业设计题目:单片机控制步进电机驱动的多用XY工作台。
(4)三、数控系统总体方案的确定 (4)(一)系统运动方式的确定 (4)(二)伺服系统的选择 (4)(三)计算机系统的选择 (5)(四)X—Y工作台的传动方式 (5)四、机械部分设计 (5)(一)确定系统脉冲当量 (5)(二)工作台外形尺寸及重量初步估算 (6)(三)滚动导轨副的计算、选择 (7)(四)滚珠丝杠计算、选择 (8)(五)齿轮计算、设计 (11)(六)步进电机惯性负载的计算 (12)(七)步进电机的选用 (13)五、数控系统硬件电路设计 (15)(一)数控系统的硬件电路由以下几部分组成: (15)(二)主控制器CPU的选择 (15)(三)存储器扩展电路设计 (15)(四)步进电机驱动电路设计 (16)(五)其它辅助电路设计 (17)六、系统控制软件的设计 (18)(一)系统控制软件的主要内容 (18)(二)系统控制功能分析 (18)(三)系统管理程序控制 (19)(四)自动加工程序设计 (19)结束语 (20)参考资料 (21)摘要我设计的是车床XY轴工作台和控制系统,采用单片机控制步进电动机驱动工作台。
首先确定设计的总体方案,然后对车床的机械部分进行设计,其中包括工作台、滚动导轨、滚珠丝杠、步进电动机的设计和选用,最后对数控系统硬件和软件设计。
新一代的CNC系统这类典型机电一体化产品正朝着高性能、智能化、系统化以及轻量、微型化方向发展。
关键词:数控车床 XY工作台控制系统前言一、当今世界数控技术及装备发展的趋势及我国数控装备技术发展和产业化的现状在我国对外开放进一步深化的新环境下 ,发展我国数控技术及装备、提高我国制造业信息化水平和国际竞争能力的重要性 ,并从战略和策略两个层面提出了发展我国数控技术及装备的几点看法。
数控XY工作台与控制系统设计
数控XY工作台与控制系统设计
首先,数控XY工作台的设计需要考虑到工作台的结构和材质选用。
工作台的结构通常有固定工作台和可移动工作台两种形式。
固定工作台适
用于对工件固定位置要求较高的加工,而可移动工作台则可以根据需要进
行位置调整。
材质选用上可以考虑使用铝合金、高强度钢材等材料制作,
以保证工作台的刚性和稳定性。
其次,数控XY工作台的运动方式主要有直线运动和旋转运动两种方式。
直线运动可以通过滑轨、直线导轨等机械结构实现,而旋转运动则需
要使用旋转轴承等机械部件。
在设计时需要根据加工工艺的需求,确定运
动方式的选择,并结合控制系统来实现精确的运动控制。
控制系统是数控XY工作台的关键部分,它主要包括硬件和软件两个
层面。
硬件方面,需要选择合适的机床控制器、伺服电机、编码器等设备,并进行适当的布线和接线。
软件方面,需要编写相应的数控程序,实现工
作台的各种运动和加工操作。
常用的数控编程语言有G代码和M代码,根
据不同的加工需求编写相应的程序。
在数控XY工作台的设计中,还需要考虑到各种安全保护措施。
例如,加工过程中需要加装防护罩,以防止操作人员的误触和机械部件的碰撞。
同时,需要设计相应的紧急停止装置,以应对突发情况。
另外,还可以考
虑添加温度监测、过载保护等功能,提高设备的安全性和可靠性。
总之,数控XY工作台的设计需要综合考虑结构、运动方式、控制系
统和安全保护等多个因素。
只有在这些方面都得到合理的设计和配置,才
能保证工作台的高效加工和可靠运行。
数控车床XY工作台与控制系统设计

数控车床XY工作台与控制系统设计数控车床是一种以数控技术为基础,通过程序控制工作台和刀具进行运动,完成加工工件的机床。
其中,XY工作台和控制系统是数控车床的核心部分,对于车床性能和加工精度有着重要的影响。
1.XY工作台设计XY工作台是数控车床上工件加工位置的平台,需要满足以下设计要求:-高刚性:为了保证加工过程中工件不发生振动或变形,工作台需要具备高刚性,以承受切削力和惯性力的作用。
-高精度:XY工作台需要有很高的加工精度,以满足工件的加工要求。
因此,在设计过程中需要考虑材料选择、结构设计以及精密加工工艺等因素。
-大载荷能力:由于加工过程中工作台需要承受工件和刀具的重量,因此需要考虑工作台的载荷能力。
-快速平稳运动:为了提高加工效率,工作台的运动速度需要快速稳定,可以通过选择合适的驱动方式来实现。
-多工位设计:在一台数控车床上,通常需要进行多个工序的加工,因此工作台上应设计多个工位,以满足不同工序的需求。
-自动换刀:为了实现多工序的连续加工,工作台上需要设计自动换刀装置,以实现快速换刀。
控制系统是数控车床上的大脑,负责接受加工程序的指令,并控制各个部件的运动。
一个优秀的控制系统需要具备以下特点:-高可靠性:数控车床上的加工过程通常需要长时间运行,因此控制系统需要具备高可靠性,以保证工作稳定。
-高精度:数控车床的加工精度与控制系统有着密切的关系,因此控制系统需要具备高精度的定位和控制能力。
-快速响应:为了满足不同加工需求,控制系统需要具备快速响应的能力,以实现快速平稳的运动控制。
-编程灵活:数控车床通常需要根据不同的工件进行加工,因此控制系统需要具备编程灵活性,可以方便地修改和调整加工程序。
-可视化界面:为了方便操作和监控加工过程,控制系统需要具备直观的可视化界面,以显示当前的加工状态和参数。
-通信功能:为了实现与其他设备的数据交互,控制系统需要具备通信功能,可以与上位机或其他设备进行数据传输。
总之,数控车床的XY工作台和控制系统设计是数控车床性能和加工精度的关键因素。
XY工作台设计
目录一、设计的目的 (1)二、设计任务 (1)三、总体方案的确定 (1)四、机械传动部件的计算与选型 (3)五、控制系统设计 (14)六、总结 (17)七、附录 (17)一、设计的目的 课程设计是一个重要的实践性教学环节,要求学生综合的运用所学的理论知识,独立进行的设计训练,主要目的:1、通过设计,使学生全面地、系统地了解和掌握数控机床的基本组成及其想怪知识,学习总体的方案拟定、分析与比较的方法。
2、通过对机械系统的设计,掌握几种典型传动元件与导向元件的工作原理、设计计算及选用的方式3培养学生独立分析问题和解决问题的能力,学习并树立“系统设计”的思想 4锻炼提高学生应用手册和标准、查阅文献资料及撰写科技论文的能力 二、设计任务题目:X —Y 数控工作台机电系统设计任务:设计一种供立式数控铣床使用的X-Y 数控工作台,主要参数如下: 1)立铣刀最大直径d=20mm ; 2)立铣刀齿数Z=4; 3)最大铣削宽度mm a e 15=; 4)最大背吃刀量mm a p 12=; 5)加工材料为碳素钢;6)X 、Y 方向的脉冲当量mm y x 005.0==δδ/脉冲; 7)X 、Y 方向的定位精度均为mm 01.0±;8)工作台尺寸230mmX230mm,加工范围为250mmX250; 9)工作台空载最快移动速度min /2000mm v v y x ==; 10)工作台进给最快移动速度min/300maxmax mm v v fy fx ==;11)移动部件总重量为800N ; 12)每齿进给量mm f z 1.0= 13)铣刀转速n=300r/min 三、总体方案的确定1 机械传动部件的选择1.1导轨副的选用 要设计的X-Y 工作台是用来配套轻型的立式数控铣床的,需要承受的载荷不大,但脉冲当量小、定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小、不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.控制系统硬件设计
X-Y数控工作台控制系统硬件主要包括CPU、传动驱动、传感器、人机交互界面。
硬件系统设计时,应注意几点:电机运转平稳、响应性能好、造价低、可维护性、人机
交互界面可操作性比较好。
1. CPU板
1.1 CPU的选择
随着微电子技术水平的不断提高,单片微型计算机有了飞跃的发展。
单片机的型号很多,而目前市场上应用MCS-51芯片及其派生的兼容芯片比较多,如目前应用最广的8位单片机89C51,价格低廉,而性能优良,功能强大。
在一些复杂的系统中就不得不考虑使用16位单片机,MCS-96系列单片机广泛应用于
伺服系统,变频调速等各类要求实时处理的控制系统,它具有较强的运算和扩展能力。
但是
定位合理的单片机可以节约资源,获得较高的性价比。
从要设计的系统来看,选用较老的8051单片机需要拓展程序存储器和数据存储器,无
疑提高了设计价格,而选用高性能的16位MCS-96又显得过于浪费。
生产基于51为内核的
单片机的厂家有Intel、ATMEL、Simens,其中在CMOS器件生产领域ATMEL公司的工艺
和封装技术一直处于领先地位。
ATMEL公司的AT89系列单片机内含Flash存储器,在程
序开发过程中可以十分容易的进行程序修改,同时掉电也不影响信息的保存;它和80C51
插座兼容,并且采用静态时钟方式可以节省电能。
因此硬件CPU选用AT89S51,AT表示ATMEL公司的产品,9表示内含Flash存储器,S表示含有串行下载Flash存储器。
AT89S51的性能参数为:Flash存储器容量为4KB、16位定时器2个、中断源6个(看门狗
中断、接收发送中断、外部中断0、外部中断1、定时器0和定时器1中断)、RAM为128B、14位的计数器WDT、I/O口共有32个。
1.2 CPU接口设计
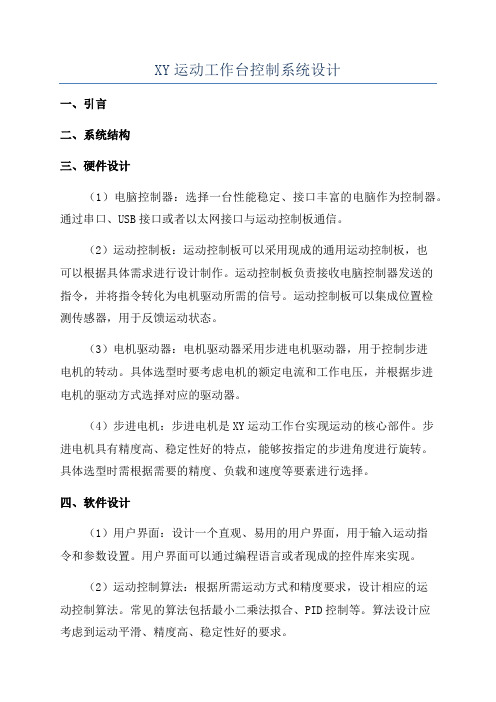
CPU接口部分包括传感器部分、传动驱动部分、人机交互界面三部分。
示意图如下所示:
图3-1 CPU外部接口示意图
AT89S51要完成的任务:
(1)将行程开关的状态读入CPU,通过中断进行处理,它的优先级别最高。
(2)通过程序实时控制电机和电磁铁的运行。
(3)接受键盘中断指令,并响应指令,将当前行程开关状态和键盘状态反应到LED上,实现人机交互作用。
由于AT89S51只有P1口和P3口是准双向口,但P3口主要以第二功能为主,并且在系统中要用到第二功能的中断口,因此要进行I/O扩展。
考虑到电路的简便性和可实现性,实际中采用内部自带锁存器的8155,所以AT89S51的I/O口线分配如下:
(1)P1.0-P1.5控制X-Y两个方向步进电机的A、B、C线圈通电,形成A-AB-B-BC-C-CA-A三相六拍正转模式和A-AC-C-CB-B-BA-A的反转模式。
(2)P1.6口输出控制电磁铁的吸合。
(3)P3.2和P3.3两个中断源中INT0优先级最高,它读入行程开关的状态并触发中断;INT1读入点动、复位、圆弧插补开关的状态而触发中断。
(4)P0.0-P0.7外部I/O扩展的数据读取。
(5)P2.7和P2.6决定8155的PA、PB、PC口的地址选择。
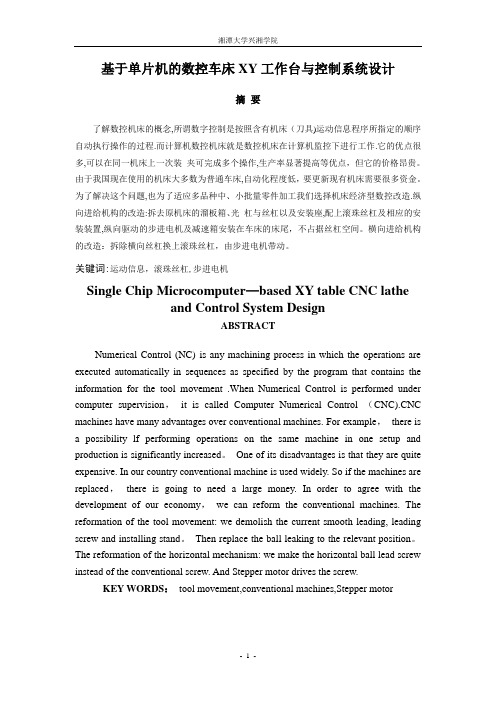
图3-2 A T89S51控制系统图
PB口接LED反映当前运行的8个状态:X+禁止、X-禁止、Y+禁止、Y-禁止、手动X+运行、手动X-运行、手动Y+运行、手动Y-运行。
PA口低四位反映触发中断1的4个行程开关的状态。
PC口低6位反映了触发中断2的手动X+运行、手动X-运行、手动Y+运行、手动Y-运行、复位(RST)、圆弧插补6个开关的状态。
2 驱动系统
传动驱动部分包括步进电机的驱动和电磁铁的驱动,步进电机须满足快速急停、定位和退刀
时能快速运行、工作时能带动工作台并克服外力(如切削力、摩擦力)并以指令的速度运行。
在
定位和退刀时电磁铁吸合使刀抬起,绘图时能及时释放使刀落下。
2.1 步进电机驱动电路和工作原理
步进电机的速度控制比较容易实现,而且不需要反馈电路。
设计时的脉冲当量为0.005mm,
步进电机每走一步,工作台直线行进0.005mm。
步进电机驱动电路中采用了光电偶合器,它具有较强的抗干扰性,而且具有保护CPU的作用,当功放电路出现故障时,不会将大的电压加在CPU上使其烧坏。
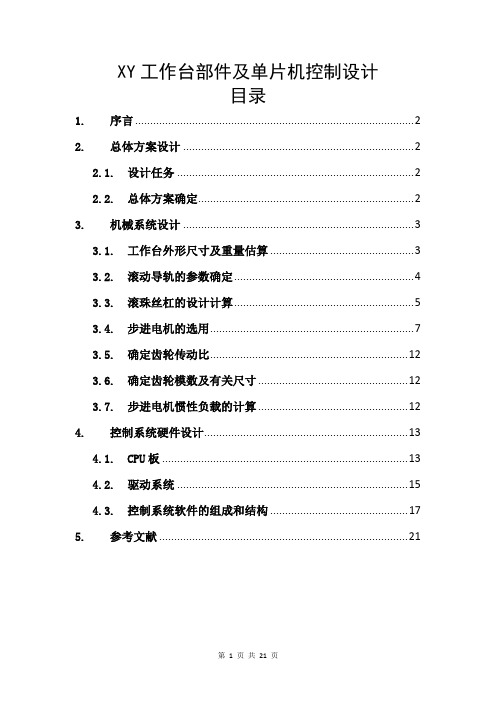
图3-4 步进电机驱动电路图
该电路中的功放电路是一个单电压功率放大电路,当A相得电时,电动机转动一步。
电路中与绕组并联的二极管D起到续流作用,即在功放管截止是,使储存在绕组中的能量
通过二极管形成续流回路泄放,从而保护功放管。
与绕组W串联的电阻为限流电阻,限制
通过绕组的电流不至超过额定值,以免电动机发热厉害被烧坏。
由于步进电机采用的是三相六拍的工作方式(三个线圈A、B、C),其正转的通电顺序
为:A-AB-B-BC-C-CA-A,其反转的通电顺序为:A-AC-C-CB-B-BA-A。
2.2 电磁铁驱动电路
该驱动电路也采用了光电偶合器,但其功放电路相对简单。
其光电偶合部分采用的是达林顿管,因为驱动电磁铁的电流比较大。
2.3 电源设计
两电机同时工作再加上控制系统用电,所需电源容量比较大,需要选择大容量电源。
此系统中用到的电源电压为27V 、12V 、5V ,为了便于管理和电源容量需求,就采用了标准的27V 电源作为基准,通过芯片进行电压转换得到所需的12V 和5V 电压。
图3-7 电源转换电路图
电路中在转换芯片的前后有两个电容,前面电容起防止自激作用,后面电容起滤波作用。
此
步进时钟 A 相波形 B 相波形 C 相波形
图3-5 三相六拍工作方式时相电压波形(正转)
图3-6 电磁铁驱动电路
外,在具体应用的过程中,LM7805必须加上散热片。
3 传感器和人机界面
由于步进电机不需要反馈电路,但是要注意工作台不能超过最大行程。
因此,必须在X、Y轴的方向各加上两个行程开关。
这里行程开关作用有两个:(1)防止工作台超过最大行程,使电机损坏(2)可以用与定位。
所以这4个行程开关就充当了传感器。
人机界面设计的准则就是要有良好的人机交互能力,一般要求操作简便,界面简洁明了。
此系统中共有9个LED,LED1灯亮表示X轴负方向禁止通行,LED2灯亮表示X轴正方向禁止通行,LED3灯亮表示Y轴负方向禁止通行,LED4灯亮表示Y轴正方向禁止通行,LED5灯亮表示手动使工作台向X轴负方向通行,LED6灯亮表示手动使工作台向X轴正方向通行,LED7灯亮表示手动使工作台向Y轴负方向通行,LED8灯亮表示手动使工作台向Y轴正方向通行,LED9亮表示系统通电运行。
界面上的7个按扭意义为:按扭1是通断电开关,按扭2是向X轴负方向运行的点动开关,按扭3是向X轴正方向运行的点动开关,按扭4是向Y轴负方向运行的点动开关,按扭5是向Y轴正方向运行的点动开关,按扭6是复位开关,按扭7是执行绘制圆弧开关。
图3-8 人机界面图
二.控制系统软件设计
1. 总体方案
对于AT89S51的程序设计,由于所需实现的功能较简单,采用汇编的形式。
编译器采用Keil 7.02b。
该编译器是51系列单片机程序设计的常用工具,既可用汇编,也支持C语言编译。
同时具有完善的调试功能。
2. 主流程图
图4-1
3. INT0中断服务流程图
4. INT1中断服务流程图
4.1 复位程序流程图
4.2 X轴电机点动正转程序流程图
4.3 绘制圆弧程序流程图
图4-6 逐点比较法画圆弧
4.4 步进电机步进一步程序流程图。